1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Salah satu tahapan dalam pengadaan jaring kontrol GPS adalah desain jaring. Desain jaring digunakan untuk mendapatkan jaring yang optimal. Terdapat empat tahapan dalam desain jaring GPS yaitu Zero Order Design, First Order Design, Second Order Design, dan Third Order Design. Zero Order Design adalah optimasi dalam memilih sistem referensi yang optimum. First Order Design adalah optimasi dalam memilih lokasi stasiun sehingga membentuk geometri yang optimum. Second Order Design adalah optimasi dalam memilih pengamatan yang akan dilakukan dan dengan tingkat kepresisian yang diharapkan. Third Order Design adalah optimasi untuk meningkatkan jaring yang telah ada. Penelitian ini mengkaji optimasi desain yang didasarkan pada First Order Design.
Pada First Order Design, terdapat 2 kriteria untuk menentukan tingkat keoptimuman jaring yaitu akurasi dan kehandalan. Ditinjau dari kriteria akurasi menurut Grafarend (1974) terdapat 5 kriteria akurasi yaitu A-Optimality, D-Optimality, E-D-Optimality, S-D-Optimality, dan I-Optimality. Jaring dikatakan lebih optimum dari segi akurasi jika nilainya semakin kecil. Ditinjau dari kriteria kehandalan menurut Yalçinkaya dan Teke (2012) merujuk pada Baarda (1968) terdapat 3 kriteria kehandalan yaitu redudansi individu, kehandalan luar, dan kehandalan dalam. Jaring dikatakan lebih optimum dari segi kehandalan jika nilainya semakin kecil.
A-Optimality adalah optimasi jaring yang didasarkan pada penjumlahan dari nilai-nilai eigen (trace) pada matriks kofaktor parameter-parameter koordinat yang dihasilkan. Kriteria A-Optimality ini menunjukkan tingkat kehomogenan jaring. Jaring yang homogen berarti jaring tersebut memiliki baseline dengan panjang yang relatif sama. D-Optimality adalah optimasi jaring yang didasarkan pada hasil perkalian atau determinan dari nilai eigen pada matriks kofaktor parameter-parameter koordinat yang dihasilkan. E-Optimality adalah optimasi jaring yang didasarkan pada nilai maksimum dari nilai eigen pada matriks kofaktor parameter-parameter koordinat yang dihasilkan. Nilai E-Optimality menunjukan tingkat akurasi terendah
jaring. S-Optimality adalah optimasi jaring yang didasarkan pada selisih antara nilai tertinggi dari nilai eigen pada matriks kofaktor parameter-parameter koordinat yang dihasilkan dengan nilai eigen terendahnya. I-Optimality adalah optimasi jaring yang didasarkan pada selisih antara satu dengan nilai eigen terendahnya dibagi dengan nilai eigen terendahnya.
Kehandalan dari suatu jaring dianggap tinggi ketika jaring tersebut dapat menyaring kesalahan-kesalahan kecil pada blunder. Kesalahan blunder pada pengukuran berdampak pada parameter perataan, oleh karena itu kehandalan dari jaring berguna sebagai kriteria desain. Kriteria kehandalan dalam pada jaring kontrol menunjukkan kesalahan kecil yang tak terdeteksi di dalam pengukuran. Kriteria kehandalan luar menunjukkan efek dari sebuah blunder yang tak terdeteksi pada koordinat-koordinat jaring.
Penelitian ini berusaha mengkaji desain jaring yang optimum ditinjau dari geometri jaring (First Order Design). Desain jaring didesain dalam 5 bentuk geometri, mulai dari yang relatif kurang kompleks sampai ke yang paling kompleks. Perubahan bentuk geometri dari yang relatif kurang kompleks ke yang lebih kompleks dilakukan dengan penambahan baseline. Berdasarkan kelima bentuk desain tersebut kriteria optimum dilakukan dengan menggunakan kriteria akurasi dan kehandalan. Kriteria akurasi menggunakan 5 kriteria akurasi yaitu A-Optimality, D-Optimality, E-D-Optimality, S-D-Optimality, dan I-Optimality. Kriteria kehandalan menggunakan 3 kriteria kehandalan yaitu redudansi individu, kehandalan luar, dan kehandalan dalam. Semua desain jaring ini dibuat di atas citra Google Earth dengan mengambil lokasi di wilayah kampus UGM.
I.2. Pertanyaan Penelitian
Rumusan masalah dari penelitian yang dilakukan adalah sebagai berikut : 1. Apakah penambahan baseline (jaring yang semakin kompleks) pada jaring
akan menjadikan jaring lebih optimum?
2. Apakah penambahan baseline (jaring yang semakin kompleks) pada jaring akan selalu konsisten terhadap semua kriteria akurasi?
3. Apakah penambahan baseline (jaring yang semakin kompleks) pada jaring akan selalu konsisten terhadap semua kriteria kehandalan?
I.3. Cakupan Penelitian
Cakupan kegiatan pada penelitian ini adalah:
1. Metode hitungan yang digunakan untuk estimasi koordinat adalah hitung kuadrat terkecil metode parameter.
2. Analisis akurasi jaring menggunakan kriteria A-Optimality, D-Optimality, E-Optimality, S-E-Optimality, dan I-Optimality.
3. Analisis kehandalan jaring menggunakan kriteria redudansi individu, kehandalan luar, dan kehandalan dalam.
4. Titik referensi hitungan adalah titik Boulevard UGM yang dianggap tidak memiliki kesalahan (fixed).
5. Bobot yang digunakan merupakan matriks identitas, karena menggunakan kajian First Order Design.
I.4. Tujuan
Adapun tujuan dari penelitian ini adalah sebagai berikut:
1. Melakukan optimasi geometri jaring GPS berdasarkan kriteria A-Optimality, D-Optimality, E-Optimality, S-Optimality, dan I-Optimality.
2. Melakukan optimasi geometri jaring GPS berdasarkan kriteria redudansi individu, kehandalan luar, dan kehandalan dalam.
3. Memperoleh geometri jaring yang optimal berdasarkan kriteria-kriteria di atas.
I.5. Manfaat
Manfaat dari penelitian ini adalah sebagai berikut:
1. Diperolehnya cara mendesain jaring GPS yang optimum ditinjau dari geometri jaring berdasarkan kriteria akurasi (A-Optimality, D-Optimality, E-Optimality, S-Optimality, dan I-Optimality) dan kriteria kehandalan (redudansi individu, kehandalan luar, dan kehandalan dalam).
1.6. Tinjauan Pustaka
Wijayatmo (2011) melakukan kajian tentang ketelitian koordinat serta kehandalan jaring kontrol horisontal untuk melakukan monitoring Waduk Sermo dengan 3 bentuk desain jaring. Hasil dari penelitian ini menjelaskan bahwa ketelitian koordinat dan kehandalan jaring berbeda antara desain satu dengan yang lainnya. Ketelitian terbaik dari titik BM 5 berada pada desain 3. Simpangan baku terkecil dari desain 3 menandakan bahwa ketelitian yang dihasilkan baik. Ketelitian koordinat, rata-rata nilai circular error, serta nilai rata-rata kehandalan dalam lokal dan nilai rata-rata kehandalan luar lokal desain 3 merupakan desain yang direkomendasikan untuk digunakan dalam pengamatan deformasi pada Waduk Sermo. Desain 3 adalah desain yang seperti pada desain pertama dengan menghilangkan ukuran yang membentuk segitiga dengan sudut yang sangat lancip.
Widiarto (2012) melakukan kajian ketelitian dan kekuatan jaring menggunakan kriteria optimasi ditinjau dari tingkat kepresisiannya dengan cara N-optimality, E-optimality, S-E-optimality, dan D-optimality pada Waduk Sermo. Bedasarkan analisis optimasi jaring dengan kriteria kepresisian terhadap kedua desain jaring kontrol, diperoleh hasil desain 2 proses ketujuh memiliki tingkat kualitas dan kekuatan jaring paling tinggi, serta merupakan desain jaring yang paling optimal. Hal tersebut terjadi karena dilakukan penyederhanaan dari bentuk desain 1 dengan mengurangi ukuran lebih (redudancy) sudut dan jarak yang memiliki memiliki ketelitian ukuran yang rendah pada setiap titiknya. Nilai dari parameter optimasi kriteria kepresisian desain 2 proses ketujuh adalah A-optimality = 0,0081 m, N-optimality = 0,0053 m, S-optimality = 0,0052 m, D-S-optimality = 1,5685E-52 m.
I.7. Landasan Teori I.7.1. Hitung Kuadrat Terkecil Metode Parameter
Menurut Mikhail (1981), ketika ada redudansi pada pengukuran, perataan dibutuhkan untuk menghasilkan solusi yang unik. Hitung perataan adalah suatu cara untuk menentukan nilai koreksi yang harus diberikan pada hasil ukuran, sehingga hasil ukuran memenuhi syarat geometriknya. Syarat geometrik merupakan persyaratan yang menyatakan hubungan antara suatu pengukuran dengan pengukuran lainnya yang harus dipenuhi. Menurut Wolf dan Ghilani (1997), metode hitung
perataan memakai prinsip kuadrat terkecil yaitu jumlah kuadrat dari koreksi yang diberikan pada hasil ukuran adalah minimum dengan besaran pengamatan pada persamaan tersebut merupakan fungsi dari parameter.
Pengukuran yang dilakukan, selanjutnya digunakan untuk menentukan besaran-besaran lainnya yang ingin diketahui nilainya. Sebelum melakukan pengukuran harus diketahui suatu model matematika yang menyatakan hubungan antara pengukuran dengan besaran yang akan ditentukan nilainya. Model matematika tersebut memungkinkan diketahuinya jumlah ukuran minimum yang diperlukan. Apabila pengukuran yang dilakukan terbatas pada jumlah ukuran minimum yang diperlukan, kesalahan kasar (blunder) pada salah satu hasil ukuran tidak dapat dideteksi. Untuk menghindari hal tersebut, dilakukan pengukuran yang melebihi jumlah ukuran minimum yang diperlukan.
Salah satu metode untuk melakukan optimasi jaring dalam keperluan desain jaring GPS adalah dengan metode hitung kuadrat terkecil. Hitung perataan kuadrat terkecil dimaksudkan untuk mendapatkan harga estimasi dari suatu parameter yang paling mendekati nilai sebenarnya. Caranya dengan menentukan besaran yang tidak diketahui (parameter) dari sekumpulan data ukuran yang melebihi dari data minimum yang diperlukan. Prinsip penyelesaian parameter dari hitung kuadrat terkecil adalah jumlah kuadrat dari residu minimum. Dalam bentuk persamaan dapat ditulis seperti pada pesamaan (I.1).
vi 2 = minimum……... (I.1) Model matematis metode parameter dapat ditulis sebagai berikut (Widjajanti dan Heliani, 2005):
La = F(Xa)……... (I.2)
F(Xa) =F(Xo+X)………. (I.3)
Nilai estimasi pengamatan seperti pada persamaan (I.4) dan (I.5) :
La =Lb+V……….. (I.4)
Lb + V =F(Xo+X)………. (I.5)
Dengan asumsi bahwa Lb mengandung kesalahan acak, sehingga nilai pengamatan dapat dikoreksi dengan nilai besaran kesalahan acak V (residu). Model matematis pada persamaan (I.5) harus dilinierisasikan untuk mendapatkan persamaan pengamatan.
Lb + V= F(Xo) + 𝜕𝐹
𝜕𝑎 |xa=x X +... (I.6) Lb + V = F(Xo) + AX ... (I.7) V = AX + F(Xo) – Lb ... (I.8) V = AX + L ... (I.9) Dalam hal ini,
La : nilai estimasi pengamatan Xa : nilai estimasi parameter Lb : nilai pengamatan
L : selisih nilai estimasi pengamatan dengan nilai pengamatan V : residu atau koreksi pengamatan
Xo : nilai pendekatan parameter X : nilai koreksi parameter
Dari kuadrat persamaan (I.9) dapat diperoleh persamaan (I.13) :
VTPV= (AX + L)T P (AX + L) ... (I.10) = (XTAT + LT) P (AX + L) ... (I.11) = (XTATPAX) + XTATPL + LTPAX + LTPL ... (I.12) = XTATPAX + 2XTATPL + LTPL ... (I.13) Prinsip kuadrat terkecil Ʃ VT
PV = minimum, seperti pada persamaan (I.14) :
𝜕𝑉𝑇𝑃𝑉 𝜕𝑋 = 0 ... (I.14) Dengan demikian, 𝜕𝑉 𝜕𝑋
=
𝜕 (𝐴𝑋−𝐿) 𝜕𝑋 = A ... (I.15)Dari persamaan (I.15) dapat dihitung nilai koreksi estimasi parameter, seperti pada persamaan (I.16) :
X = -(ATPA)-1 ATPL ………. . (I.16) Nilai estimasi parameter dapat dilihat pada persamaan (I.17) :
Xa = Xo + X ……….. (I.17) Varian aposteori dapat dihitung menggunakan persamaan (I.18) :
𝜎
𝑜2=
VTPV
𝑛−𝑢 ……… . (I.18)
A : matriks turunan fungsi pengamatan terhadap parameter P : matriks bobot
n : jumlah pengamatan u : jumlah parameter
Untuk memperoleh ketelitian estimasi residu didapat dari varian-kovarian residu yang diturunkan dari persamaan (I.15) dengan menggunakan hukum perambatan varian-kovarian sebagai persamaan (I.19):
∑VV =
𝜎
𝑜2 ( P-1 – A(ATPA)-1 AT) ………. . (I.19) Ketelitian estimasi pengamatan diperoleh dari varian-kovarian estimasi pengamatan (I.3) dengan menggunakan hukum perambatan varian-kovarian sebagai persamaan (I.20):∑yy=
𝜎
𝑜2A(ATPA)-1 AT ………. . (I.20) Ketelitian koreksi estimasi parameter diperoleh dari varian-kovarian parameter yang diturunkan dari persamaan (I.15) dengan menggunakan hukum perambatan varian-kovarian sebagai persamaan (I.21):∑XX =
𝜎
𝑜2 (ATPA)-1 ... (I.21)I.7.2. Uji Statistik
Uji statistik dilakukan untuk menganalisis hasil hitungan yang meliputi uji global dan uji blunder.
I.7.2.1.Uji global. Pengujian ini untuk mengetahui ada atau tidaknya kesalahan tak acak yang mempengaruhi data pengamatan. Uji global ini menggunakan prinsip pengujian nilai varian aposteori terhadap nilai varian apriori, dengan menggunakan sebaran fungsi Fisher.
Penyusunan hipotesis nol (Ho) sebagai perumusan sementara yang diuji kebenarannya dan hipotesis tandingan (Ha) sebagai lawan dari hipotesis nol adalah sebagai berikut :
Ho : o2 ˆo2 ... (I.22) Ha : o2 ˆo2
... (I.23) Hipotesis nol akan diterima jika dipenuhi hubungan pada persamaan (Mikhail,1976) sebagai berikut :
r o o F1 , , 2 2 ˆ ... (I.24) Dalam hal ini,
2 o : varian apriori 2 ˆo : varian aposteori r
F1,, : nilai statistik dari tabel Fisher dengan argumen α dan f (derajat kebebasan) Penerimaan Ho menyatakan bahwa hasil pengukuran tidak dipengaruhi oleh kesalahan tak acak, sehingga memenuhi sebaran normal. Penolakan Ho merupakan indikasi adanya kemungkinan pengukuran dipengaruhi oleh kesalahan tak acak sehingga terjadi perubahan nilai rata-rata dan pengukuran tersebut tidak mengikuti sebaran normal. Jika dari hasil uji data pengamatan ternyata dipengaruhi kesalahan tak acak, maka kesalahan tersebut dicari dengan uji blunder.
I.7.2.2.Uji blunder. Pengujian ini dilakukan jika hipotesis nol pada uji global ditolak. Hal tersebut berarti ada data pengamatan yang mungkin dipengaruhi oleh kesalahan tak acak, dalam hal ini kesalahan kasar (blunder) atau data snooping. Untuk mendeteksi ada tidaknya blunder, dilakukan uji statistik berdasarkan simpangan baku residu σvi, yang merupakan akar positif dari elemen ke i, i matriks varian-kovarian residu Σvv (Soeta‟at 1996). Uji blunder ini dilakukan untuk tiap data pengamatan. Hipotesis adalah sebagai berikut :
Ho : pengukuran ke-i yang tidak terdapat blunder Ha : pengukuran ke-i yang terdapat blunder
Hipotesis diterima jika dipenuhi hubungan pada persamaan (I.25):
2 / 1 , 1 , 1 o F Vi Vi ... (I.25) Dalam hal ini,
Vi : residu pengukuran ke-i
σVi: simpangan baku pengukuran ke-i
I.7.3. Nilai Eigen dan Vektor Eigen
Menurut Arifin (2001), jika A adalah matriks n x n, maka vektor tak nol x di dalam Rn dinamakan vektor eigen dari A jika Ax adalah kelipatan skalar dari x, yaitu,
Ax = λ x ... (I.26) Skalar λ disebut nilai eigen dari A dan x dikatakan vektor eigen yang bersesuaian dengan λ. Persamaan Ax=λx mewajibkan:
1. Vektor tidak boleh nol, jika vektor adalah vektor nol, maka bukan vektor eigen.
2. Skalar λ harus bilangan riil, jika bilangan kompleks, maka λ bukan nilai eigen, karenanya dapat bernilai positif, negatif, maupun nol.
Dalam mencari nilai eigen matriks A yang berukuran n x n maka persamaan (I.26) dituliskan kembali sebagai persamaan (I.27):
Ax = λ Ix ... (I.27)
(λ I – A)x = 0 ... (I.28)
Persamaan (I.24) mempunyai penyelesaian persamaan (I.28):
det (λ I – A) = 0 ... (I.29) Persamaan (I.28) disebut persamaan karakteristik A.
Istilah-istilah yang sering digunakan untuk menyatakan nilai eigen antara lain adalah trace dan norm. Seperti yang disajikan pada persamaan (I.30) trace adalah penjumlahan dari nilai-nilai eigen (λ) dari sebuah matriks. Seperti yang disajikan pada persamaan (I.31) norm adalah nilai maksimum dari nilai-nilai eigen sebuah matriks.
Trace = λ1+ λ2 +...+λn ... (I.30) Norm = maksimum [λ1, λ2 ,...λn ] ... (I.31) Dalam hal ini,
λ1,λ2 ,...λn : nilai eigen matriks
I.7.4. Optimasi Jaring Kontrol
Optimasi jaring dapat diartikan memaksimalkan fungsi bobot dan ukuran pada jaring tersebut (Schmitt, 1985) dalam (Kuang, 1996). Secara matematis, optimasi jaring kontrol adalah meminimumkan atau memaksimumkan fungsi obyek yang menggambarkan kualitas jaringan titik kontrol pada batas-batas tertentu. Fungsi yang
dimaksimumkan atau diminimumkan disebut fungsi tujuan sedangkan fungsi yang menyatakan batasnya disebut sebagai nilai kritis.
Optimasi suatu jaring kontrol melibatkan analisis pendahuluan untuk mendapatkan konfigurasi titik yang optimum dari pengukuran antar stasiun. Analisis dilakukan sebelum pengukuran dilakukan. Nilai pengukuran yang sebenarnya tidak diperlukan dan memang belum diperoleh karena belum dilakukan pengukuran. Analisis pendahuluan ini sangat membantu dalam perencanaan kegiatan, yaitu untuk mengetahui ketelitian pengukuran yang akan dilaksanakan, untuk menentukan toleransi pada saat pengukuran dan untuk menentukan standar prosedur kegiatan pengukuran yang dilakukan. Pada analisis pendahuluan, semua komponen pengukuran dianggap telah bebas dari kesalahan sistematis.
I.7.4.1. Kriteria optimum dilihat dari fungsi tujuan akurasi. Akurasi didefinisikan sebagai derajat atau tingkat kedekatan pengukuran data terhadap data yang benar (true value). Akurasi tidak hanya memuat kesalahan random, tetapi bias yang disebabkan dari kesalahan sistematik. Apabila tidak ada bias, maka simpangan baku bisa digunakan untuk menghitung atau menyatakan akurasi. Pengukuran dikatakan akurat apabila rata-rata kesalahannya dihitung dengan kuadrat terkecil mendekati nol atau sama dengan nol.
Secara umum kriteria optimasi dilihat dari fungsi tujuan akurasi didasarkan pada tingkat akurasi pengukuran jaring geodesi. Tingkat akurasi suatu jaring dapat diperoleh dari matriks varian-kovarian koordinat titik. Analisis optimasi fungsi skalar dari kriteria optimasi akurasi yang digunakan yaitu A-optimality, D-optimality, E-optimality, S-E-optimality, dan I-optimality dari nilai eigen masing-masing proses.
1. A-optimality
A-optimality adalah optimasi jaring yang berdasarkan penjumlahan dari nilai-nilai eigen (λ) pada masing-masing proses perataan jaring atau sering disebut dengan istilah trace. Nilai trace dibandingkan dengan nilai trace pada jaring yang lain. Hasil dari perbandingan nilai trace yang paling minimum dari nilai trace beberapa jaring berarti jaring tersebut memiliki tingkat optimal yang paling tinggi.
Menurut Kuang (1996) rumus untuk mencari A-optimality adalah sebagai persamaan (I.32) berikut :
Trace (QXX ) = λ1+ λ2 +...+λn = minimum ... (I.32) Dalam hal ini,
λ1,λ2 ,...λn : nilai eigen matriks QXX
QXX : matriks kofaktor ditentukan dengan persamaan (I.33) berikut :
QXX = (ATPA)1 ... (I.33) 2. D-optimality
D-optimality adalah optimasi jaring yang berdasarkan hasil perkalian atau determinan dari nilai eigen pada proses perataan suatu jaring. Nilai D-optimality yang paling kecil pada suatu jaringan menunjukkan jaring tersebut memiliki tingkat optimum yang paling tinggi. Menurut Kuang (1996) rumus untuk mencari D-optimality adalah sebagai persamaan (I.34) berikut :
Det (QXX ) =
λ
1* λ
2* .... * λ
n =minimum ... (I.34)3. E-optimality
E-optimality adalah optimasi jaring yang berdasarkan nilai maksimum dari nilai eigen pada proses perataan suatu jaring. Nilai E-optimality yang paling minimum dari suatu jaring yaitu berarti jaring tersebut memiliki tingkat optimum yang paling tinggi. Menurut Kuang (1996), rumus untuk mencari E-optimality adalah sebagai persamaan (I.35) berikut :
[QXX ] = minimum ... (I.35) Dalam hal ini,
[QXX ] : nilai norm dari matriks QXX 4. S-optimality
S-optimality adalah optimasi jaring yang berdasarkan selisih antara nilai tertinggi dari nilai eigen proses perataan suatu jaring dengan nilai eigen terendahnya. Nilai S-optimality yang kecil menunjukkan jaring tersebut memiliki tingkat optimum yang paling tinggi. Menurut Kuang (1996), rumus untuk mencari S-optimality adalah sebagai persamaan (I.36) berikut :
(λ
mak- λ
min)
= minimum ... (I.36)Dalam hal ini,
λmin : nilai eigen minimum setiap desain jaring
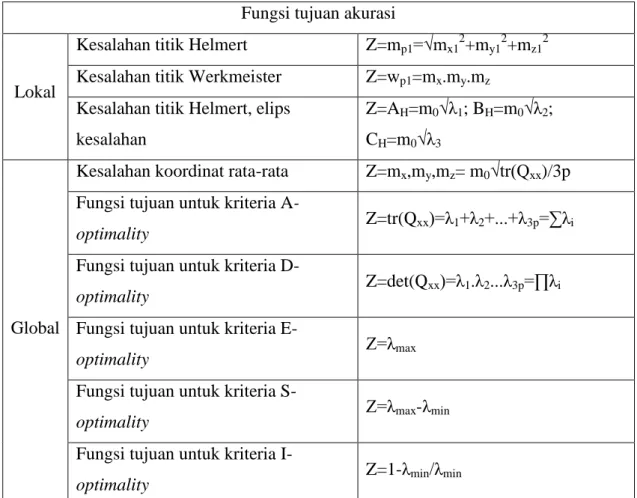
Nilai skalar untuk fungsi tujuan akurasi (Z) dalam optimasi jaring GPS disajikan dalam Tabel I.1.
Tabel I.1. Optimasi jaring GPS untuk kriteria akurasi (Yalçinkaya dan Teke, 2012) Fungsi tujuan akurasi
Lokal
Kesalahan titik Helmert Z=mp1=√mx12+my12+mz12 Kesalahan titik Werkmeister Z=wp1=mx.my.mz
Kesalahan titik Helmert, elips kesalahan
Z=AH=m0√λ1; BH=m0√λ2; CH=m0√λ3
Global
Kesalahan koordinat rata-rata Z=mx,my,mz= m0√tr(Qxx)/3p Fungsi tujuan untuk kriteria
A-optimality Z=tr(Qxx)=λ1+λ2+...+λ3p=∑λi
Fungsi tujuan untuk kriteria
D-optimality Z=det(Qxx)=λ1.λ2...λ3p=∏λi
Fungsi tujuan untuk kriteria
E-optimality Z=λmax
Fungsi tujuan untuk kriteria
S-optimality Z=λmax-λmin
Fungsi tujuan untuk kriteria
I-optimality Z=1-λmin/λmin
Keterangan Tabel I.1:
mx, my, mz merupakan simpangan baku koordinat yang dicari. λi merupakan nilai eigen dari matriks kofaktor.
I.7.4.2. Kriteria optimum dilihat dari fungsi tujuan kehandalan. Kehandalan dari suatu jaring tergantung pada geometri dari konfigurasi matriks pengamatan yang bukan pengamatan sebenarnya. Permasalahan kehandalan harus dipertimbangkan pada tahap desain agar kesalahan kasar dibuat sekecil mungkin dan untuk memperkecil efek dari ketidaktepatan dalam mengestimasi parameter.
Kehandalan dalam dari jaring kontrol menunjukkan kesalahan kecil yang tak terdeteksi di dalam pengukuran. Kehandalan luar menunjukkan efek dari sebuah
kesalahan besar yang tak terdeteksi pada koordinat- koordinat jaring dan jumlah yang dihitung dari kesalahan kasar yang ada. Kehandalan dari suatu jaring dianggap tinggi ketika jaring dapat mengidentifikasi kesalahan kasar yang kecil. Kesalahan kasar pada pengukuran berdampak pada parameter perataan, oleh karena itu kehandalan dari jaring berguna sebagai kriteria desain.
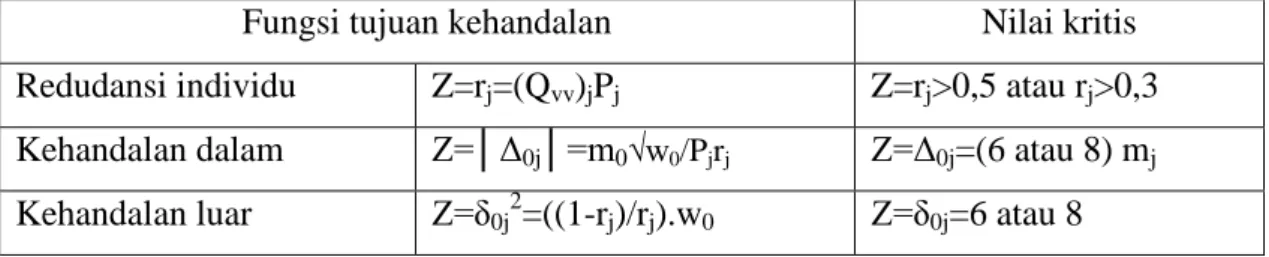
Tabel I.2. Optimasi jaring GPS untuk kriteria kehandalan (Yalçinkaya dan Teke, 2012)
Fungsi tujuan kehandalan Nilai kritis
Redudansi individu Z=rj=(Qvv)jPj Z=rj>0,5 atau rj>0,3 Kehandalan dalam Z=│Δ0j│=m0√w0/Pjrj Z=Δ0j=(6 atau 8) mj
Kehandalan luar Z=δ0j2=((1-rj)/rj).w0 Z=δ0j=6 atau 8
Keterangan Tabel I.2:
Pj merupakan matriks bobot dari persamaan. M0 merupakan simpangan baku dari unit bobot.
W0 merupakan standar batas bawah untuk parameter, nilai W0 tergantung dari tingkat signifikan dan uji kekuatan minimum. Menurut Kuang (1996), biasanya uji kekuatan dipilih yang 80% dengan level signifikan 0,01%.
QVV adalah matriks kofaktor residu, ditentukan dengan persamaan (I.37) QVV = Qii – A Qxx AT
... (I.37) Qii = invers Pj ... (I.38) Tabel I.3 Beberapa nilai batas bawah dengan kekuatan uji 1-β0 (Kuang, 1996)
α Derajat kebebasan
2 5 10 20 30 40 50 85
0,05 9,6 13,4 16,5 21,0 25,3 28,5 32,0 40,0
0,01 14,0 18,3 22,7 29,0 34,5 39,0 42,0 50,0
Pada Tabel I.3 dapat dilihat nilai standar batas bawah pada tingkat signifikan 0,05 dan 0,01 dengan kekuatan 80%.
I.7.5. GNSS
Global Navigation Satellite System (GNSS) adalah sistem navigasi satelit untuk penentuan posisi geo-spasial (lintang, bujur, dan tinggi) secara ekstra-terestris secara global. Sistem satelit yang tergabung didalam GNSS saat ini antara lain satelit-satelit GPS, GLONAS, KOMPAS dan GALILEO. GNSS terdiri atas tiga segmen (Hofmann-Wellenhof, 2008), yaitu :
1. Segmen angkasa. Untuk memberikan kemampuan secara kontinyu penentuan posisi global, maka harus dikembangkan konstelasi jumlah satelit untuk masing-masing GNSS. Hal ini untuk memastikan bahwa setidaknya empat satelit secara simultan terlihat pada setiap lokasi di permukaan bumi. Satelit-satelit GNSS, pada dasarnya telah dilengkapi dengan platform untuk jam atom, radio transceiver, komputer dan berbagai peralatan pembantu yang digunakan untuk mengoperasikan sistem.
2. Segmen sistem kontrol. Disebut juga sebagai segmen tanah atau darat, bertanggung jawab atas kendali semua sistem. Tugas segmen ini meliputi, penyebaran dan pemeliharaan sistem, pelacak satelit untuk penentuan dan prediksi orbit dan jam parameter, pemantauan data tambahan (misalnya, parameter ionosfer), dan meng-upload pesan ke satelit.
3. Segmen pengguna. Diklasifikasikan ke dalam kategori pengguna (militer dan sipil), jenis penerima (kemampuan untuk melacak satu, dua atau bahkan frekuensi lebih), dan berbagai layanan informasi pemerintah maupun swasta yang telah didirikan untuk memberikan informasi status GNSS dan data kepada pengguna.
Penelitian ini lebih berfokus pada penggunaan satelit GPS (Global Positioning System), sehingga satelit-satelit GNSS yang lain tidak dijelaskan secara mendalam.
I.7.5.1. Global Positioning System (GPS). GPS adalah sistem navigasi dan penentuan posisi berbasis satelit yang pertama kali dikembangkan oleh Departemen Pertahanan Amerika Serikat. Satelit-satelit GPS (24 satelit) beredar dalam 6 bidang orbit mengelilingi bumi, yang terletak jauh di atas permukaan bumi yaitu pada ketinggian sekitar 20.200 km. Satelit tersebut berputar mengelilingi bumi dengan periode
orbit 11 jam 58 menit.
Konsep dasar dari penentuan posisi dengan GPS adalah reseksi (pengikatan ke belakang) dengan jarak. Jarak tersebut didapat dari pengukuran secara simultan ke beberapa satelit GPS yang koordinatnya sudah diketahui. Posisi yang diberikan GPS adalah posisi dengan dimensi (X,Y,Z atau
,,һ) dalam datum WGS 84. Untuk mendapatkan posisi suatu titik di permukaan bumi dibutuhkan minimal empat pengamatan ke satelit GPS. Tiga pengamatan untuk menentukan parameter posisi (X,Y,Z atau λ,,һ) dan satu pengamatan untuk mendapat parameter waktu (t). Posisi titik dapat ditentukan menggunakan satu receiver GPS dengan metode absolute positioning, maupun differential positioning dengan minimal dua buah receiver yang salah satunya telah diketahui koordinatnya (Abidin, 2002).I.7.5.2. Sistem koordinat GPS. Koordinat yang dihasilkan dari pengamatan satelit GPS adalah koordinat tiga dimensi (X,Y,Z maupun φ,λ,h) yang mengacu pada datum WGS 84. Karena koordinat yang dihasilkan GPS mengacu pada datum WGS 84, maka apabila pengguna hendak menggunakan sistem koordinat dalam datum yang berbeda maka harus dilakukan transformasi datum terlebih dahulu.Komponen tinggi dari koordinat tiga dimensi yang diberikan oleh GPS adalah tinggi yang mengacu ke permukaan elipsoid, yaitu elipsoid Geodetic Reference System (GRS) 1980 yang didefinisikan dengan empat buah parameter utama yaitu :
1. Sumbu panjang (a) = 6378137 m
2. Koefisien harmonik (C20) = -484.16685 x 10-6
3. Kecepatan sudut rotasi bumi (ω) = 7292115 x 10-11 rad dt-1 4. Konstanta gravitasi bumi (GM) = 3986005 x 108 m3 dt-2
Sistem tinggi elipsoid jarang digunakan untuk keperluan survei rekayasa karena tidak mengacu pada dimensi fisik bumi (geoid). Untuk mentransformasikan sistem tinggi elipsoid ke sistem tinggi geoid dibutuhkan informasi tentang undulasi geoid. Undulasi geoid adalah besar perbedaan antara tinggi elipsoid dengan tinggi ortometrik. Sistem tinggi ortometrik merupakan sistem tinggi yang mengacu pada geoid, yaitu bidang ekuipotensial yang berhimpit dengan muka air laut rata-rata. Sistem tinggi inilah yang umum digunakan sehari-hari untuk keperluan praktis.
I.7.5.3. Lokasi titik GPS. Tidak seperti halnya survei terestris, survei GPS tidak memerlukan saling keterlihatan (intervisibility) antara titik-titik pengamat. Pada survei GNSS yang diperlukan adalah pengamat dapat melihat satelit (satellite visibility). Pada dasarnya lokasi titik GPS dipilh sesuai dengan kebutuhan serta tujuan penggunaan dari titik GPS itu sendiri nantinya. Secara umum lokasi titik GPS, sebaiknya memenuhi persyaratan berikut ini :
1. Mempunyai ruang pandang langit yang bebas ke segala arah di atas elevasi 15°.
2. Jauh dari obyek-obyek reflektif yang mudah memantulkan sinyal GPS, untuk meminimalkan atau mencegah terjadinya multipath.
3. Jauh dari obyek-obyek yang dapat menimbulkan interferensi elektris terhadap penerimaan sinyal GPS.
4. Kondisi dan struktur tanahnya stabil.
5. Mudah dicapai (lebih baik dengan kendaraan bermotor). 6. Sebaiknya ditempatkan di tanah milik negara.
7. Ditempatkan pada lokasi dimana monumen/pilar tidak mudah terganggu atau rusak, baik akibat gangguan manusia, binatang, ataupun alam.
8. Penempatan titik pada suatu lokasi juga harus memperhatikan rencana penggunaan lokasi yang bersangkutan di masa depan.
9. Titik-titik yang dibuat harus dapat diikatkan minimal ke satu titik yang telah diketahui koordinatnya, untuk keperluan perhitungan, pendefinisian datum, serta penjagaan konsistensi dan homogenitas dari datum dan ketelitian titik-titik dalam jaringan.
I.7.6. Metode Penentuan Posisi dengan GPS
Metode penentuan posisi dengan GPS dibagi atas dua macam, yaitu metode penentuan posisi secara absolute dan penentuan posisi secara diferensial.
I.7.6.1. Metode absolute positioning. Dalam metode ini, posisi yang akan ditentukan bisa dalam keadaan diam maupun dalam keadaan bergerak. Karena titik yang akan ditentukan posisinya tidak tergantung pada titik lain yang berarti juga tidak dilakukan pengamatan di titik lain, maka receiver GPS yang digunakan hanya satu buah.
Ketelitian posisi yang diperoleh dari metode ini rendah karena ketelitian posisi titik tergantung pada ketelitian data serta geometri satelit. Data posisi yang diperoleh masih terpengaruh oleh bias dan kesalahan. Oleh karena itu metode penentuan posisi absolute tidak digunakan untuk menentukan posisi yang membutuhkan ketelitian tinggi.
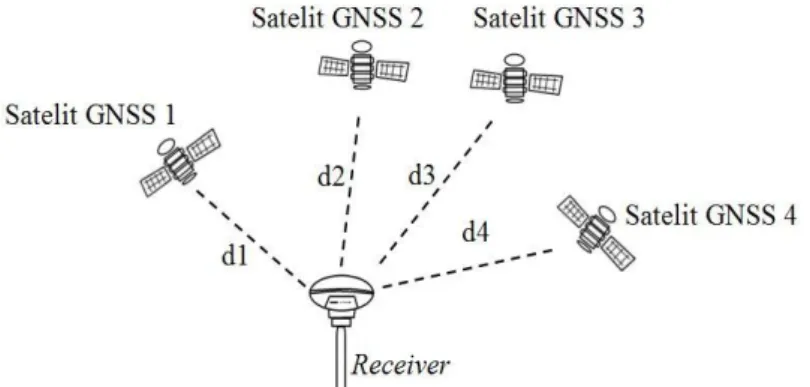
Gambar I.1. Metode absolute positioning
Metode penentuan posisi secara absolute pada prinsipnya adalah reseksi dengan jarak ke beberapa satelit secara simultan. Jarak hasil hitungan oleh receiver GPS diperoleh dari data ukuran rambat sinyal dari satelit ke receiver. Metode pendekatan yang dilakukan pada penentuan posisi dengan metode absolute ini adalah metode pendekatan pseudorange (Abidin 2002). Penentuan posisi dengan metode absolute dapat dilihat pada Gambar I.1.
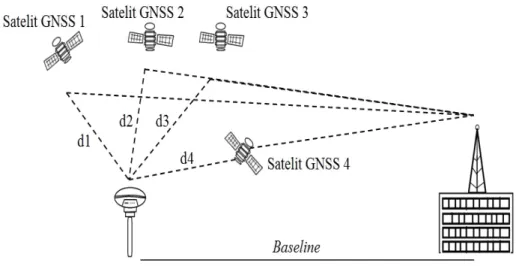
I.7.6.2. Metode differential positioning. Metode differential positioning adalah metode penentuan vektor jarak antara dua stasiun pengamatan, yang dikenal dengan baseline (Sunantyo, 2000). Penentuan posisi secara diferensial yaitu menentukan posisi dua atau lebih titik di lapangan yang dilakukan secara bersamaan dalam rentang waktu yang sama. Metode differential positioning bisa mengeliminasi dan atau mengurangi efek dari beberapa kesalahan dan bias yang mempengaruhi akurasi dalam pengukuran.
Dalam metode ini diperlukan minimal dua unit receiver dan satu perangkat lunak pengolah data GPS. Pada penentuan posisi diferensial atau sering disebut dengan metode relatif, posisi titik-titik yang diperoleh ditentukan terhadap titik lain yang telah diketahui koordinatnya yang dianggap sebagai titik acuan. Penentuan posisi dengan metode diferensial dapat dilihat pada Gambar I.2.
Gambar I.2. Metode differential positioning
I.7.7. Jaring GPS
Jaring GPS dibentuk oleh titik-titik yang diketahui koordinatnya (titik fixed) dan titik-titik yang akan ditentukan posisinya. Titik-titik tersebut dihubungkan dengan baseline yang diamati komponen-komponen vektornya (dX, dY, dZ). Distribusi titik-titik yang diukur secara relatif tidak akan terlalu mempengaruhi kualitas jaringan GPS. Kualitas jaringan akan lebih dipengaruhi oleh distribusi baseline trivial yang digunakan (Abidin 2002). Contoh jaring GPS dapat dilihat pada Gambar I.3.
Keterangan Gambar I.4:
: titik yang akan diamat. : titik referensi.
: sinyal GPS
: baseline yang diamati. : receiver GPS.
: satelit GPS
1.7.8. Transformasi Koordinat
Sistem koordinat merupakan sistem yang memberikan nilai skalar kepada setiap titik di dalam ruang berdimensi n. Di dalam ruang 3D, sistem koordinat memberikan 3 bilangan (riil) kepada setiap titik. Di dalam ruang 2D sistem koordinat memberikan 2 bilangan (riil) kepada setiap titik. Pada penelitian ini nilai koordinat pendekatan didapat dari hasil pengamatan titik dengan menggunakan citra Google Earth yang menggunakan sistem koordinat kaertesi 2D dengan sistem proyeksi UTM. Sedangkan proses hitungan yang dilakukan menggunakan sistem koordinat kartesi 3D dengan datum WGS 84 dan origin berada pada pusat massa bumi, karena sistem koordinat tersebut yang digunakan dalam pengukuran GPS.
Nilai koordinat pendekatan harus memiliki sistem koordinat yang sama dengan sistem yang digunakan dalam pengukuran GPS. Oleh karena itu harus dilakukan transformasi dari koordinat kartesi 2D dengan proyeksi UTM menjadi kartesi 3D dengan datum WGS 84 dan origin berhimpit pusat massa bumi (geosetrik).
Transformasi dari koordinat kartesi 2D dengan proyeksi UTM menjadi kartesi 3D dengan datum WGS 84 geosentris tidak bisa dilakukan secara langsung. Namun demikian koordinat kartesi 2D dengan proyeksi UTM harus dirubah dulu ke sistem koordinat geodetik (φ, λ, h) terlebih dahulu baru dirubah ke 3D dengan datum WGS 84 geosentrik.
Google Earth sendiri memiliki fasilitas untuk merubah koordinat dengan sistem proyeksi UTM ke sistem koordinat geodetik (φ, λ, h), namun tinggi yang dihasilkan masih berupa tinggi ortometrik. Dalam mendapatkan tinggi geodetik diperlukan undulasi geoid yang dijumlahkan dengan tinggi ortomertik pada titik yang bersangkutan.
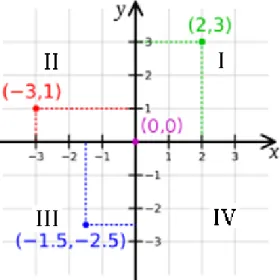
I.7.8.1. Sistem koordinat 2D dan sistem proyeksi UTM. Dalam mendefinisikan sistem koordinat kartesi 2D diperlukan dua garis berarah yang tegak lurus satu sama lain, dan satuan panjang (skala) pada kedua (ketiga) garis atau sumbu tersebut. Dua sumbu tersebut berpotongan di titik yang disebut origin sistem koordinat. Dengan perkataan lain, pendefinisian sistem koordinat meliputi pendefinisian origin sistem, orientasi sumbu koordinat, dan skala. sistem koordinat kartesi 2D dapat dilihat pada Gambar 1.4.
Gambar I.4 Sistem koordinat kartesi 2D
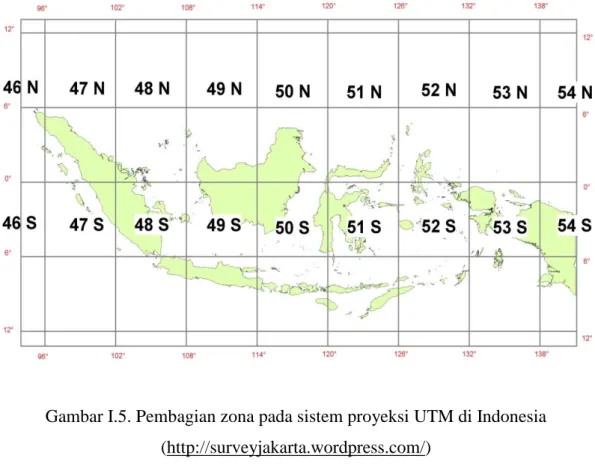
Proyeksi Universal Transvere Mercator (UTM) merupakan proyeksi silinder transversal konform yang memotong bola bumi pada dua meridian standar. Proyeksi UTM membagi bumi menjadi 60 zona tiap zone memiliki lebar 6 derajat. Sistem proyeksi UTM memiliki kesalahan makin besar jika menjauhi ekuator, untuk menghindari koordinat negatif setiap meridian tengah diberi harga 500000 m timur. Sedangkan untuk arah utara dan selatan garis ekuator digunakan sebagai garis datum dan diberi harga 0 m untuk lintang utara dan untuk lintang selatan diberi harga 10.000.000 m (Prihandito, 2010). Pembagian zona pada proyeksi UTM kawasan Indonesia dapat dilihat pada Gambar I.5.
Gambar I.5. Pembagian zona pada sistem proyeksi UTM di Indonesia (http://surveyjakarta.wordpress.com/)
I.7.8.2. Sistem koordinat geodetik (φ, λ, h) dan geosentrik (X,Y,Z). Sistem koordinat geodetik mengacu pada permukaan suatu bentuk elipsoid tertentu (elipsoid referensi). Posisi suatu titik pada sistem koordinat geodetik ditentukan oleh lintang geodetik (φ), bujur geodetik (λ) dan tinggi di atas permukaan elipsoid (h). Tinggi di atas permukaan elipsoid terletak di atas elipsoid acuan, tetapi N (garis normal) tidak jatuh tepat di origin karena perpotongan tegak lurus di sisi luar elipsoid.
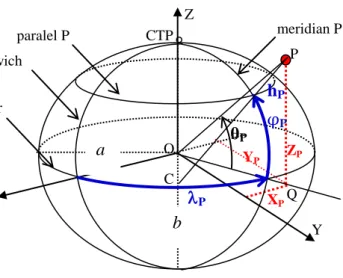
Sistem koordinat geosentrik mengacu pada permukaan suatu bentuk elipsoid tertentu. Sistem koordinat geosentrik merupakaan sistem koordinat kartesi 3D terdiri dari tiga sumbu pada arah X, Y, dan Z dengan origin ada pada pusat massa bumi. Pada sistem koordinat kartesi 3D, posisi suatu titik ditentukan oleh nilai X, Y, dan Z. Sistem koordinat geodetik (φ, λ, h) dan geosentrik (X,Y,Z) dapat dilihat pada Gambar I.6.
Gambar I.6. Sistem koordinat geodetik dan geosentrik Keterangan Gambar I.6 :
: lintang dan bujur geodetik : X,Y, dan Z geosentrik : titik P
Transformasi dari sistem koordinat geodetik ke koordinat geosentrik disajikan pada persamaan (I.40), (I.41), (I.42) :
N = a/(1- e2 sin2φ)1/2 ... (I.39) X = (N + h)cos φ cos λ ...
(I.40) Y = (N + h) cos φ sin λ ...
(I.41) Z = [N(1 – e2) + h] sin φ ... (I.42) Dalam hal ini,
φ : lintang geodetik θ : lintang geosentrik λ : bujur geodetik e2 : eksentrisitas N : garis normal X : nilai absis Y : nilai ordinat Z : nilai tinggi φP P C θP hP YP ZP XPQ X Z CTP P Y O a b meridian P paralel P meridian Greenwich ekuator
1.7.9. Elips Kesalahan Absolut
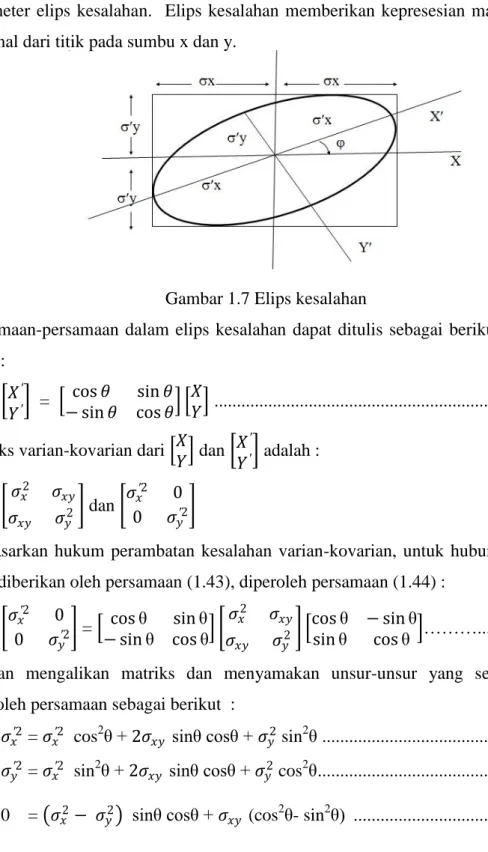
Simpangan baku koordinat titik hanya dapat menggambarkan kepresisian sepanjang sumbu x dan y. Agar dapat disajikan secara grafis, perlu ditentukan parameter elips kesalahan. Elips kesalahan memberikan kepresesian maksimal dan minimal dari titik pada sumbu x dan y.
Gambar 1.7 Elips kesalahan
Persamaan-persamaan dalam elips kesalahan dapat ditulis sebagai berikut (Mikhail, 1981): 𝑋′ 𝑌′ = cos 𝜃 sin 𝜃 − sin 𝜃 cos 𝜃 𝑋 𝑌 ... (1.43) Matriks varian-kovarian dari 𝑋
𝑌 dan 𝑋 ′ 𝑌′ adalah : 𝜎𝑥2 𝜎𝑥𝑦 𝜎𝑥𝑦 𝜎𝑦2 dan 𝜎𝑥 ′2 0 0 𝜎𝑦′2
Berdasarkan hukum perambatan kesalahan varian-kovarian, untuk hubungan vektor yang diberikan oleh persamaan (1.43), diperoleh persamaan (1.44) :
𝜎𝑥′2 0 0 𝜎𝑦′2 = cos θ sin θ − sin θ cos θ 𝜎𝑥2 𝜎𝑥𝑦 𝜎𝑥𝑦 𝜎𝑦2 cos θ − sin θ sin θ cos θ ………... ... (1.44) Dengan mengalikan matriks dan menyamakan unsur-unsur yang sesuai, maka diperoleh persamaan sebagai berikut :
𝜎𝑥′2 = 𝜎𝑥′2 cos2θ + 2𝜎𝑥𝑦 sinθ cosθ + 𝜎𝑦2 sin2θ ... (1.45) 𝜎𝑦′2 = 𝜎𝑥′2 sin2θ + 2𝜎𝑥𝑦 sinθ cosθ + 𝜎𝑦2 cos2θ ... (1.46) 0 = 𝜎𝑥2− 𝜎
Subtitusikan (1/2) sin 2θ untuk sinθ cosθ, dan cos2θ untuk (cos2θ - sin2θ) pada persamaan (1.47), diperoleh persamaan (1.48):
1 2 (𝜎𝑦
2− 𝜎
𝑥2) sin 2θ + 𝜎𝑥𝑦 cos 2θ = 0 ... (1.48) Sudut orientasi elips kesalahan ditentukan dengan persamaan (I.49):
tan 2θ = 2𝜎𝑥𝑦
𝜎𝑥2−𝜎𝑦2 ... (I.49)
Kuadran dari 2θ ditentukan dengan menentukan tanda-tanda pembilang 2𝜎𝑥𝑦 dan penyebut 𝜎𝑥2− 𝜎𝑦2. Dengan menghilangkan θ dari persamaan (I.45) dan (I.46) dihasilkan persamaan (I.50) dan (I.51):
𝜎𝑥′2 = 𝜎𝑥 2+ 𝜎 𝑦2 2 + 𝜎𝑥2− 𝜎𝑦2 2 4 + 𝜎𝑥𝑦 2 1/2 ... (1.50) 𝜎𝑦′2 = 𝜎𝑥 2+ 𝜎 𝑦2 2 - 𝜎𝑥2− 𝜎𝑦2 2 4 + 𝜎𝑥𝑦 2 1/2 ... (1.51) Simpangan baku 𝜎𝑥 dan 𝜎𝑦 adalah setengah sumbu panjang dan setengah
sumbu pendek pada elips kesalahan standar. Hal ini menunjukkan bahwa varian 𝜎𝑥2 dan 𝜎𝑦2 adalah nilai eigen dari matriks varian-kovarian dari vektor acak 𝑋𝑌 .
1.8.Hipotesis
Hipotesis dari penelitian ini adalah, pada kondisi jumlah dan posisi titik kontrol yang sama, jaring dengan jumlah baseline lebih banyak (jaring yang semakin kompleks) memiliki nilai akurasi dan kehandalan yang lebih baik daripada jaring dengan jumlah yang lebih sedikit.