SKRIPSI
Disusun Oleh :
BAYU INDRA PRASETIYO NPM. 0634010180
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN“
JAWA TIMUR
SKRIPSI
Diajukan Untuk Memenuhi Sebagai Persyaratan Dalam Memperoleh Gelar Sarjana Komputer
Program Studi Teknik Informatika
Disusun Oleh :
BAYU INDRA PRASETIYO
NPM. 0634010180PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN“
JAWA TIMUR
PENGENDALIAN RUANG INKUBATOR BAYI BERBASIS MIKROKONTROLER
Disusun Oleh :
BAYU INDRA PRASETIYO
NPM. 0634010180Telah Disetujui Untuk Mengikuti Ujian Negara Lisan Gelombang II Tahun Akademik 2011 / 2012
Mengetahui,
Ketua Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pambangunan Nasional ”Veteran” Jawa Timur
Basuki Rahmat, S.Si, MT NPT. 369 070 602 09 Pembimbing Utama
Basuki Rahmat, S.Si, MT NPT. 379 070 602 09
Pembimbing Pendamping
MIKROKONTROLER Disusun Oleh :
BAYU INDRA PRASETIYO NPM. 0634010180
Telah Dipertahankan di Hadapan dan Diterima Oleh Tim Penguji Skripsi Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional “Veteran” Jawa Timur Pada Tanggal 15 April 2011
Pembimbing, Tim Penguji,
Dekan Fakultas Teknologi Industri
Universitas Pembangunan Nasional “Veteran” Jawa Timur
Alhamdulillah atas kehadirat Allah SWT yang telah memberikan Berkat, Rahmat dan Ridho-Nya, akhirnya penulis dapat menyelesaikan tugas akhir ini sebagai salah satu prasyarat dalam menyelesaikan Program Studi Sarjana Komputer. Jurusan Teknik Informatika, Fakultas Teknologi Industri, UPN ”VETERAN” Jawa Timur. Pada laporan tugas akhir ini, penulis membahas tentang pembuatan pengendalian ruang inkubator berbasis mikrokontroler. Pada proses penyusunannya hingga terwujudnya laporan ini, penulis banyak mendapat bantuan dan bimbingan dari berbagai pihak. Untuk itu, penulis mengucapkan terima kasih yang sedalam-dalamnya kepada:
1. Ir. Sutiyono, MT selaku Dekan Fakultas Teknologi Industri di Universitas Pembangunan Nasional ”Veteran” Jawa Timur Surabaya.
2. Bapak Basuki Rahmat, S.Si, M.T, selaku ketua Jurusan Teknik informatika
di Universitas Pembanguna Nasional ”Veteran” Jawa Timur Surabaya. 3. Bapak Basuki Rahmat, S.Si, M.T, selaku dosen pembimbing I atas segala
arahan dan bimbingannya.
4. Bapak Delta Ardy Prima S, ST, MT sebagai dosen pembimbing II atas segala arahan dan bimbingannya.
5. Seluruh Dosen UPN veteran jawa timur terima kasih atas ilmu yang diberikan.
6. aku persembahkan kepada kedua orang tua aku yang selalu mendukung aku selama ini , buat kakak aku tercinta ratna sari nurhadayani , diah puspitasari, dewi sitoresmi makasih atas dukungan nya atas segalanya dan untuk keluarga surabaya makasih atas semuanya.
7. Terima kasih buat Endah widy sari my chinta yang selalu mendukung aku
satu persatu, terima kasih atas dukungannya.
Penulis menyadari bahwa dalam penyusunan dan pembahasan laporan ini masih banyak terdapat kekurangan, oleh karena itu penulis mengharap kritik dan saran yang membangun guna penyempurnaan selanjutnya. Semoga laporan tugas akhir ini bisa memberikan manfaat dan dapat menambah wawasan kita semua.
Surabaya, 15 April 2011
ABSTRAK ... i
KATA PENGANTAR ... ii
2.1.7 Struktur dan Cara Kerja Port ... 25
BAB III ANALISA DAN PERANCANGAN SISTEM... 40
BAB IV IMPLEMENTASI ……… 55
4.1 Implementasi Lingkungan ……... 55
4.2 Implementasi Data ………... 56
4.3 Implementasi Antarmuka ……... 56
4.3.1 Form Menu Utama Login ... 56
4.3.2 Form Menu pengendalian ruang inkubator... 58
4.3.3 Form Menu Pengawasan Sistem... 59
4.3.4 Form Laporan Utama ... 61
4.4 Implementasi Hardware ... 61
BAB VI KESIMPULAN DAN SARAN ... 87
6.1 Kesimpulan ... 87
6.2 Saran ... 87
Gambar 2.1 Diagram Blok Fungsional Atmega8535... 10
Gambar 2.12 Menghubungkan Memori Program Eksternal Dengan Skema... 21
Gambar 2.13 Organisasi RAM internal... 21
Gambar 2.14 128 byte RAM internal Bagian Bawah ( lower )……… 22
Gambar 2.15 128 byte RAM Bagian Atas ………... 23
Gambar 2.16 Catu Daya Sederhana Untuk Mikrokontrolle…………... 30
Gambar 2.17 7-Segmen... 30
Gambar 2.18 Rangkaian Interface ke 7-Segmen... 31
Gambar 2.19 Rangkaian relay... 32
Gambar 2.20 Skema relay Elektromagnitik ... 33
Gambar 2.21 Rangkaian dan Simbol Logika Relay Simbol ... 33
Gambar 2.22 Peran Assebler... 37
Gambar 3.1 Diagram system alur pengendali ruang inkubator bayi... 43
Gambar 3.2 Flowchart Alur Mikrokontrolel pada inkubator... 44
Gambar 3.3 Flowchart Login Pada Aplikasi... 45
Gambar 3.4 Diagram berjenjang dari aplikasi pengendali ruang inkubator bayi. 47 Gambar 3.5 Diagram Context... 47
Gambar.3.6 Conceptual data model... 48
Gambar 3.7 Physical Data Model... 49
Gambar 3.8 Diagram blok pengendali ruang inkubator bayi……… 49
Gambar 3.9 Koneksi pin ATmega8535 denga RS 232…... 51
Gambar 3.10 Form Login... 52
Gambar 3.11 Form Menu Utama... 53
Gambar 3.12 From sistem stand by inkubator... 53
Gambar 3.13 Report Laporan... 54
Gambar 4.1 Form Login... 57
Gambar 4.2 Peringatan jika terjadi kesalahan memasukkan nama pengguna... 58
Gambar 4.3 Form Menu Utama pada pengendali ruang inkubator……… 59
Gambar 4.4 Form pengawasan system inkubator ……….. 60
Gambar 4.5 Form Laporan Utama ……….…… 61
Gambar 4.10 Source code pengawasan system stand by inkubator... 65
Gambar 4.11 Source code Laporan Utama………... 66
Gambar 4.12 Source code dimikrokonrtoler... 67
Gambar 5.1 Pemasangan LED pada mikrokontroler ATmega8535... 68
Gambar 5.2 Pengaturan CommPort... 70
Gambar 5.3 Pengendalian ruang inkubator program pada mikrokontroler... 71
Gambar 5.4 Form login ... 72
Gambar 5.5 Menu pengawasan... 73
Gambar 5.6 Form System stand by inkubator ………. 74
Gambar 5.7 System Ruuning belum sampai suhu yang ditentukan………. 75
Gambar 5.8 System running suhu yang ditentukan oleh operator ……….. 75
Gambar 5.9 Sistem running pada suhu diatas yang di inputkan oleh operator… 76 Gambar 5.10 Form Laporan Utama... 77
Gambar 5.11 Miniatur pengendalian ruang inkubator bayi... 78
Gambar 5.12 Miniatur pada proses penyesuaian suhu didalam ruang inkubator.. 79
Gambar 5.13 Adapter... 79
Gambar 5.14 Komponen Mikrokontroler... 80
Gambar 5.15 Relay... 80
Gambar 5.16 USB converter RS 232... 81
Gambar 5.17 Sensor Suhu LM35... 81
Gambar 5.18 Penguat daya sensor... 82
Gambar 5.19 Pengendalian ruang incubator bayi………... 83
Gambar 5.20 Proses pemanasan didalam inkubator... 83
Gambar 5.21 Pendinginan ruang incubator menggunakan kipas... 84
ABSTRAK
Alat medis yang berperan penting untuk menyelamatkan bayi prematur
yang kelahirannya kurang dari 9 bulan didalam kandungan, oleh karena itu bayi tersebut sangat lah rentang dengan penyakin dan benar – benar besih dari bakteri. Oleh sebab itu dibuatkanlah sebuah alat yang membantu untuk menghanggatkan tubuh sang bayi dan menjaga dari berbagai penyakit dan bakteri jahat. Inkubator berbasis mikrokontroller merupakan alat bantu untuk menghindari dari penyakit maupun bakteri jahat dari luar
Mikrokontroler merupakan salah satu perkembangan teknologi
semikonduktor.Teknologi mikrokontroler mengintegrasikan komponen-komponen
sebuah sistem komputer kedalam sebuah chip tunggal (Single Chip), sehingga teknologi ini mampu berfungsi seperti halnya sebuah sistem komputer. Salah satu fungsi yang bisa dilakukan oleh mikrokontroler adalah pada proses pengontrolan. Melihat salah satu fungsi yang bisa dilakukan mikrokontroler pada proses pengontrolan, maka pada tugas akhir ini dirancang dan dibuat sebuah sistem kontrol berbasis mikrokontroler pada pengontrolan temperatur pada inkubator bayi. Mikrokontroler dirancang untuk mengaktifkan atau menon aktifkan heater
guna mempertahankan kondisi temperatur pada set point yang diinginkan. Inkubator bayi dibuat dengan bahan yang dapat tembus pandang dimana untuk memanaskan ruang inkubator digunakan heater dengan daya sebesar 350 Watt / 220V, dan untuk mendistribusikan udara panas tersebut digunakan sebuah fan dengan kecepatan yang tidak berubah-ubah (konstan). Pada tugas akhir ini
menggunakan mikrokontroler 8535 dan sensor LM35 untuk menggetahui suhu
yang ada didalam inkubator itu sendiri.
BAB I
PENDAHULUAN
1.1LATAR BELAKANG
Perkembangan teknologi pada saat ini sudah masuk didalam segala bidang
termasuk di bidang kesehatan sekali pun, pengendalian ruang inkubator berbasis
mikrokontroller merupakan kebutuhan yang paling penting dalam kemajuan
teknologi saat ini. Dalam bidang kedokteran, pemeriksan janin dalam kandungan
ibu hamil dapat dilakukan secara lebih teliti , akurat serta dapat diprediksi dengan
tepat mengenai jenis kelamin bayi dengan bantuan peralatan USG ( ultra
sonografi ) yang merupakan gabungan rekayasa teknologi elektronika dalam
kedokteran atau yang lebih dikenal dengan teknologi elektronik amedik. Akan
tetapi karena suatu hal sering terjadi kemungkinan bayi lahir sebelum waktunya
(premature) yang ditandai dengan berat badan tidak normal ( kurang dari 2500
gram ), kulit keriput bulu-bulu kulit lebat, otot-ototnya lembek serta suhu
tubuhnya mudah terpengaruh oleh suhu lingkungan sekitarnya.
Dimana Mengingat belum sempurnanya kerja alat-alat tubuh yang perlu
untuk pertumbuhan dan perkembangan serta penyesuaian diri dengan lingkungan
hidup di luar uterus maka perlu diperhatikan pengaturan suhu lingkungan,
pemberian makanan dan bila perlu oksigen, mencegah infeksi serta mencegah
a. Pengaturan suhu badan bayi prematur /BBLN
Bayi prematuritas dengan cepat akan kehilangan panas badan
dan menjadi hipotermia, karena pusat pengaturan panas badan belum
berfungsi dengan baik, metabolismenya rendah dan permukaan badan
relatif luas oleh karena itu bayi prematuritas harus dirawat di dalam
inkubator sehingga panas badannya mendekati dalam rahim. Bila bayi
dirawat dalam inkubator maka suhu bayi dengan berat badan , 2 kg
adalah 35˚celcius dan untuk bayi dengan berat badan 2-2,5 kg adalah
33˚-34˚ derajat celcius. Bila inkubator tidak ada bayi dapat dibungkus
dengan kain dan disampingnya ditaruh botol yang berisi air panas,
sehingga panas badannya dapat dipertahankan.
b. Nutrisi
Alat pencernaan bayi prematur masih belum sempurna,
lambung kecil, enzim pencernaan belum matang, sedangkan kebutuhan
protein 3-5 gr/kg BB dan kalori 110 kal/kg BB sehingga
pertumbuhannya dapat meningkat. Pemberian minum bayi sekitar
3(tiga) jam setelah lahir dan didahului dengan menghisap cairan
lambung. Refleks menghisap masih lemah,sehingga pemberian minum
sebaiknya sedikit demi sedikit, tetapi frekwensi yang lebih sering. ASI
merupakan makanan yang paling utama,sehingga ASI lah yang paling
dahulu diberikan. Bila faktor menghisapnya kurang maka ASI dapat
diperas dan diminumkan dengan sendok perlahan-lahan atau dengan
50-60 cc/kg BB/ hari dan terus dinaikkan sampai mencapai sekitar 200
cckg BB/ hari.
c. Menghindari Infeksi
Bayi prematuritas mudah sekali terkena infeksi, karena
daya tahan tubuh yang masih lemah,kemampuan leukosit masih
kurang dan pembentukan anti bodi belum sempurna. Oleh karena itu,
upaya preventif sudah dilakukan sejak pengawasan antenatal sehingga
tidak terjadi persalinan prematuritas (BBLR). Dengan demikian
perawatan dan pengawasan bayi prematuritas secara khusus dan
terisolasi dengan baik.Demi menjaga kelangsungan hidup bayi
premature tersebut diperlukan suatu peralatan dan tempat yang
khusus, yaitu dengan cara menempatkannya dalam suatu ruangan atau
tempat isolasi yang dapat menjadikan kesetabilan suhu tubuhnya.
Peralatan ini disebut inkubator. Dimana bentuk inkubator itu sendiri
mirip seperti sebuah tabung yang dimana suhu temperaturnya
disesuaikan oleh tubuh sang bayi pada masa waktu didalam kandungan
sang ibu. Inkubator ini dilengkapi oleh system pemantau
perkembangan sang bayi tersebut, dilengkapi system keamanan pada
suatu computer didalam ruangan penjaga dan terdapat pula system
keamanan pada inkubator dengan system pengucian untuk mencegak
penculikan bayi untuk dijual belikan keorang lain.
1.2 RUMUSAN MASALAH
a. Bagaimana cara penggontrolan suhu didalam inkubator .
b. Untuk pengawasan pada bayi yang ada didalam ruang inkubator .
c. Memberikan kenyamanan untuk sang bayi
d. Menghindari dari pencurian bayi di dalam rumah sakit.
1.3 BATASAN MASALAH
Agar pembahasan tentang sistem ini lebih terarah, penulis membatasi
permasalahan yang akan dibahas pada proyek tugas akhir ini anatra lain :
1. Dalam membuat perangkat lunak dari sistem ini menggunakan bahasa
pemograman Visual Basic 6.0 dan Microsoft Acces sebagai databasenya.
2. Bahasa Assembler yang digunakan untuk operasional mikrokontroller
Atemega 8535. Penggunaan bahasa Assembler ini disebabkan karena
kemudahan dalam perancangan dan pembuatannya.
3. Penulis membatasi pembahasan mengenai mikrokontroler Atemega 8535
sebagai unit pengolah dan pengatur port yang difungsikan sebagai
portable data. Tidak membahas mengenai stuktur hardware dari
Atemega 8535.
4. Cara kerja dari sistem pengendalian ruang inkubator bayi berbasis
mikrokontroller ini di implementasikan dengan menggunakan miniatur.
Ruang lingkup dalam tugas akhir ini adalah :
1. Pengendalian ruang inkubator bayi dibuat dengan menggunakan basis
mikrokontroler.
3. Sistem pengaturan dan monitoring inkubator menggunakan aplikasi
berbasis dekstop sebagai user interface untuk mengontrol sistem
tersebut.
4. High level language yang digunakan untuk pembuatan software pada
komputer adalah Visual Basic 6.0 dan Low level leangus
5. leangus yang digunakan untuk memprogram mikrokontroler adalah
Assembly dan bahasa C.
6. Database yang digunakan adalah Microsoft Acces untuk memudahkan
dalam pengelolalaan data.
7. Cara kerja dari pengendalian ruang inkubator bayi berbasis
mikrokontroller ini di implementasikan dengan menggunakan
miniature.
1.4 TUJUAN :
Adapun tujuan yang ingin dicapai dalam tugas akhir ini adalah :
1. Merancang teknologi pada sistem pengendalian ruang inkubator bayi
berbasis mikrokontroler sehingga pemanfaatan teknologi pada bidang
ini dapat menjadi lebih berkembang seiring dengan perkembangan
teknologi secara global.
2. Merancang dan membangun sistem pengendalian ruang inkubator
bayi berbasis mikrokontroler melalui aplikasi desktop.
3. Dapat memantau perkembangan bayi dalam inkubator.
1.5 MANFAAT
Adapun manfaat yang diambil dalam tugas akhir ini adalah :
1. Memudahkan pengawasan sang bayi didalam inkubator.
2. Pengaturan suhu inkubator secara otomatis
3. Keamanan didalam incubator itu sendiri dipantau oleh camera yang
dipasang didalam miniature itu sendiri.
1.6 METODOLOGI PENELITIAN :
1. Studi literatur
a. Mencari literatur atau data-data yang berhubungan dengan
mikrokontroler, Visual Basic 6.0, dan semua komponen yang
dipakai dalam pembuatan alat tugas akhir ini dan
mempelajarinya.
b. Mempelajari tentang dasar teori yang digunakan dalam
menyelesaikan tugas akhir.
2. Pembuatan alat
1. Membuat alat pengendalian ruang incubator bayi berbasis
mikrokontroler.
2. Membuat miniature alat pengendalian ruang incubator bayi
berbasis mikrokontroler untuk simulasi cara kerja dari sistem.
3. Mendesain dan membuat program untuk mengakses dan
mikrokontroler dengan menggunakan program bahasa Visual
Basic 6.0 Assembly.
4. Membuat database dengan menggunakan Microsoft Acces.
5. Menggabungkan hardware dan software yang telah dibuat.
3. Analisa sistem dan pengujian alat
Pengujian ini dilakukan untuk mengetahui apakah pengendalian
ruang incubator bayi berbasis mikrokontroler ini sesuai dengan yang
diharapkan dan kemudian membuat analisa dari hasil pengujian tersebut.
4. Kesimpulan
Pengambilan kesimpulan yang dibuat meliputi evaluasi tahap akhir
terhadap pengoperasian pengendalian incubator bayi berbasis
mikrokontroler yang telah dibuat, serta kelebihan dan kelemahan dari
sistem tersebut.
5. Pembuatan laporan
Laporan dibuat berdasarkan dari seluruh kegiatan yang dilakukan serta
meliputi evaluasi tahap akhir terhadap pengoperasian alat dan
pemanfaatan dari alat tersebut.
6. Dokumentasi
Pada bagian ini dilakukan pembuatan laporan mulai dari Pendahuluan,
Tinjauan Pustaka, Analisa Sistem, Perancangan Sistem, Hasil dan
Pembahasan, Uji Coba Sistem dan terakhir adalah Kesimpulan dan
1.7 SISTEMATIKA PENULISAN
Adapun Sistematika Penulisan Tugas Akhir adalah sebagai berikut :
BAB I PENDAHULUAN
Bab ini membahas tetntang latar belakang masalah, rumusan masalah,
batasan masalah, tujuan penelitian, manfaat penelitian, tinjauan pustaka, metode
penelitian dan sitem penulisan.
BAB II DASAR TEORI
Bab ini membahas dasar teori untuk penyelesaian tugas akhir. Dasar teori
yang diberikan meliputi Mikrokontroler Visual Basic 6.0,dan Microsoft Acces.
BAB III ANALISIS DAN DESAIN SISTEM
Dalam bab ini akan dibahas analisa dan desain sistem secara terstruktur,
yang dilengkapi dengan beberapa diagram dan algoritma.
BAB IV IMPLEMENTASI SISTEM
Bab ini membahas spesifikasi sistem, perangkat apa saja yang
berhubungan dengan sistem dan berbagai macam implementasi sistem lainnya.
BAB V UJI COBA DAN EVALUASI
Bab ini membahas scenario uji coba yang akan dilaksanakan dan
pelaksanaan dari uji coba atau testing terhadap sistem.
BAB VI PENUTUP
Bab ini adalah bab terakhir yang menyajikan kesimpulan serta saran dari
BAB II
DASAR TEORI
2.1 Hardware
Perangkat keras, merupakan salah satu element dari sistem
komputer, suatu alat yang bisa dilihat dan diraba oleh manusia secara
langsung, yang mendukung proses komputerisasi.
Dalam bahasa Indonesia disebut dengan perangkat keras.
Merupakan perangkat yang dapat kita lihat dan dapat kita sentuh secara
fisik, seperti perangkat perangkat masukan, perangkat pemroses, maupun
perangkat keluaran.
Peralatan ini umumnya cukup canggih. Dia dapat bekerja
berdasarkan perintah yang ada padanya, yang disebut juga dengan
instruction set. Dengan adanya perintah yang dimengerti oleh mesin
tersebut, maka perintah tersebut melakukan berbagai aktifitas kepada
mesin yang dimengerti oleh mesin tersebut sehingga mesin bisa bekerja
berdasarkan susunan perintah yang didapatkan olehnya.
2.1.1 Mikrokontroler ATEMEGA 8535
Mikrokontroller ATmega8535 merupakan mikrokontroller generasi
AVR (Alfand Vegard s Risk processor). Mikrokontroller AVR memiliki
arsitektur RISC(Reduced Instruction Set Computing) 8 bit, dimana semua
instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian besar
Gambar 2.1. Diagram Blok Fungsional ATmega8535
(http://insansainsprojects.files.wordpress.com/ )diakses 29 maret 2011
Gambar 2.1. memperlihatkan bahwa ATmega8535 memiliki bagian sebagai
berikut:
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal
7. Memori Flash sebesar 8 Kb dengan kemampuan Read While Write.
8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM (Electrically Erasable Programmable Read Only Memory)
Sebesar 512 byte yang dapat diprogram saat operasi.
11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial dengan kecepatan maksimal
2,5Mbps.
13. Sistem mikroprosessor 8 bit berbasis RISC dengan kecepatan maksimal
16MHz.
2.1.1.1. Konfigurasi Pin ATmega8535
Gambar 2.2 Konfigurasi Pin ATmega8535(diambil dari data sheet ATmega8535) ( http://mylifemyidea.com/tag/automation/ diakses 29 maret 2011.)
Konfigurasi pin ATmega8535 dapat dilihat pada Gambar 2.2. Secara
fungsional konfigurasi pin ATmega8535 sebagai berikut :
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya.
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus
untuk Timer/Counter, Komparator analog, dan SPI.
5. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin khusus untuk
TWI,Komparator analog, dan Timer Oscilator.
6. Port D (PD0..PD7) merupakan pin I/O dua arah dan pin khusus untuk
Komparator analog, Interupsi eksternal, dan Komunikasi serial.
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroller.
8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan untuk ADC.
10. AREF merupakan pin masukan tegangan referensi ADC.
2.1.1.2 Peta Memori
ATmega8535 memiliki ruang pengalamatan memori data dan memori
program yang terpisah. Memori data terbagi menjadi 3 bagian, yaitu 32 buah
register umum, 64 buah register I/O, dan 512 byte SRAM Internal.Register
dengan fungsi umum menempati space data pada alamat terbawah,yaitu $00
sampai $1F, register khusus untuk menangani I/O dan control mikrokontroller
menempati 64 alamat $20 hingga $5F, sedangkan SRAM 512 byte pada alamat
Gambar 2.3. Konfigurasi Memori Data ATmega8535
(diambil dari data sheet ATmega8535) http://mylifemyidea.com/tag/automation/
Memori program yang terletak dalam Flash PEROM tersusun dalam word
karena setiap instruksi memiliki lebar 16-bit atau 32-bit. AVR ATmega8535
memiliki 4 Kbyte x 16-bit Flash PEROM dengan alamat mulai dari $000 sampai
$FFF. AVR memiliki 12-bit Program Counter (PC) sehingga mampu
mengalamati isi Flash.
ATmega8535 juga memiliki memori data berupa EEPROM 8-bit sebanyak 512
byte. Alamat EEPROM dimulai dari $000 sampai $1FF.
Status Register (SREG)
Status Register merupakan register berisi status yang dihasilkan pada
setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan
bagian dari inti CPU mikrokontroller.
Gambar 2.5. Status Register ATmega8535
(http://knowlagee.wordpress.com 28 maret 2011)
a. Bit 7 – I : Global Interrupt Enable
Bit yang harus diset untuk meng-enable interupsi.
b. Bit 6 – T : Bit Copy Storage
Instruksi BLD dan BST menggunakan bit-T sebagai sumber atau tujuan
dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit
menggunakan instruksi BST, dan sebaliknya bit-T dapat disalin kembali
ke suatu bit dalam register GPR menggunakan instruksi BLD.
c. Bit 5 – H : Half Carry Flag
d. Bit 4 – S : Sign Bit
Bit-S merupakan hasil operasi EOR antara flag-N (negative) dan flag-V
(two s complement overflow).
e. Bit 3 – V : Two s Complement Overf
Bit yang berguna untuk mendukung operasi aritmatika.
Bit akan diset bila suatu operasi menghasilkan bilangan negatif.
g. Bit 1 – Z : Zero Flag
Bit akan diset bila hasil operasi yang diperoleh adalah nol.
h. Bit 0 – C : Carry Flag
Bit akan diset bila suatu operasi menghasilkan carry.
2.1.1.3 Blog Diagram pada Mikrokontroller ATEMEGA 8535
Mikrokontroller ATmega8535 merupakan mikrokomputer CMOS 8 bit
dengan 4 kbytes flash programmbel memory. Arsitektur ATmega8535 ditunjukan
pada Gambar 2.3Atmega8535 mempunyai 32 jalur I/O, 2 buah timer/counter 16
bit, RAM internal 128 x 8 bit dbs. Untuk lebih lengkapnya lihat data sheet.
Gambar 2.6 Blok Diagram Atmega8535
2.1.1.4 Organisasi Memori
Semua piranti ATmega8535 mempunyai alamat program dan
alamat data yang terpisah. Pemisahan memori program dan memori data
membolehkan pengaksesan memori data dengan pengalamatan 8-bit,
sehingga secara cepat disimpan dan dimanipulasi oleh CPU 8-bit.
Meskipun demikian pengalamatan memori data 16-bit tetap dapat
dilakukan, yaitu dengan menggunakan register.
ATmega8535 mempunyai organisasi memori yang terdiri atas:
1. memori program (CODE)
2. memori data (DATA)
2.1.1.4.1 Memori Program (CODE)
Memori program merupakan ruang memori yang digunakan untuk
menyimpan kode program dan konstanta yang sifatnya tetap. Memori
program sifatnya haya bisa dibaca (read only memory) dan tidak bisa
diubah isinya.. Dari 64k byte yang dapat dialamati, maka 4k Byte memori
program lowest terletak dalam chip Mikrokontroler.
2.1.1.4.2 Memori Data (DATA)
Memori Data (RAM) menempati ruang alamat yang terpisah dari
memori program. Dalam 80C51, lowest 128 bytes memori data berada
dalam chip mikrokontroler. Memori data eksternal yang dapat digunakan
sampai 64k byte. Untuk sampai 64Kbytes, eksternal RAM dan dialamati
(read) dan tulis WR (write), selama pengaksesan memori data eksternal.
Ruang memori data dibagi menjadi 3 blok, yaitu 128 bawah (lower), 128
atas (upper), dan SFR (special function register).
2.1.2 Sensor
Sensor adalah device atau komponen elektronika yang digunakan
untuk merubah besaran fisik menjadi besaran listrik sehingga bisa di
analisa dengan menggunakan rangkaian listrik.
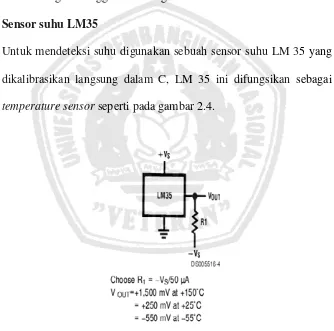
2.1.3 Sensor suhu LM35
Untuk mendeteksi suhu digunakan sebuah sensor suhu LM 35 yang dapat
dikalibrasikan langsung dalam C, LM 35 ini difungsikan sebagai basic
temperature sensor seperti pada gambar 2.4.
Gambar 2.7. LM 35 basic temperature sensor
(http://diyistheway.blogspot.com tgl 30 maret 2011 )
Vout dari LM 35 ini dihubungkan dengan ADC (Analog To Digital
tegangan 250mV dan 1,5V pada suhu 150oC dengan kenaikan sebesar 10mV/oC
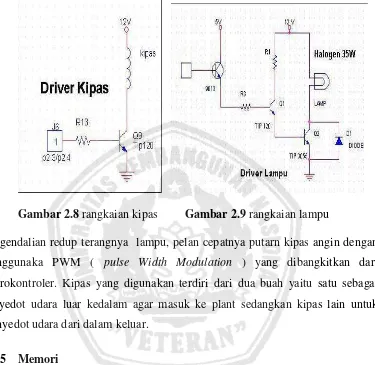
2.1.4 Rangkaian pengemudi Lampu dan kipas
Gambar 2.8 rangkaian kipas Gambar 2.9 rangkaian lampu
Pengendalian redup terangnya lampu, pelan cepatnya putarn kipas angin dengan menggunaka PWM ( pulse Width Modulation ) yang dibangkitkan dari mikrokontroler. Kipas yang digunakan terdiri dari dua buah yaitu satu sebagai penyedot udara luar kedalam agar masuk ke plant sedangkan kipas lain untuk menyedot udara dari dalam keluar.
2.1.5 Memori
Kecanggihan sebuah komputer atau kontroller ditentukan oleh
program yang kita buat. Memori digunakan sebagai tempat untuk
menimpan program, data dan stack. Program adalah kumpulan instruksi
untuk mengerjakan suatu pekerjaan. Data adalah variabel-variabel yang
dapat di ubah saat program berjalan. Stack digunakan untuk menyimpan
alamat kembali (return address) dan juga dapat dipakai untuk menyimpan
data. Umumnya didalam mikrokontroller tersedia 2 jenis memori yaitu
tidak hilang bila catu daya dimatikan, digunakan untuk menyimpan
program. Sedangkan RAM (Random-Access Memory) bersifat bisa dibaca
dan ditulis tetapi isinya bisa hilang bila catu daya dimatikan, digunakan
untuk menyimpan data stack. Dengan berkembangannya teknologi batas
antara ROM dan RAM kini agak kabur. ROM sekarang bisa ditulisi untuk
tipe flash atau EEROM. RAM sekarang juga tidak kehilangaan isinya saat
catu daya dimatikan yaitu pada tipe NVRAM (Non-Volatile RAM).
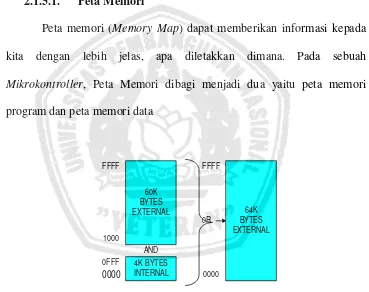
2.1.5.1. Peta Memori
Peta memori (Memory Map) dapat memberikan informasi kepada
kita dengan lebih jelas, apa diletakkan dimana. Pada sebuah
Mikrokontroller, Peta Memori dibagi menjadi dua yaitu peta memori
program dan peta memori data
FFFF FFFF
Gambar 2.10 menunjukan peta memori program. Peta memori
program menggunkan skema, artinya anda hanya boleh memilih salah satu
skema. Skema gambar sebelah kiri membuat Mikrokontroller mengambil
0FFFh maka Mikrokontroller akan mengambil instruksi dari ROM
eksternal. Alamat dari 0000h sampai 0FFFh adalah sebanyak 1000h atau
4069 atau 4 Kili-Byte. Skema sebalah kanan membuat Mikrokontroller
mengambil semua instruksi dari ROM eksternal. Bagaimana cara memlih
skema tersebut, mikrokontroller menyediakan pin kontrol yang bernama
EA (External Access). Apabila pin ini diaktifkan maka skema sebelah
kanan akan yang dipilih. Pin ini hanaya dibaca mikrokonteoller sesaat
setelah kondisi reset.
Peta memori data ditunjukan oleh Gambar 2.11 Peta memori data
menggunakan skema dan artinya anda disediakan dua skema yang dapat
digunakan bersama-sama. Terlihat bahwa RAM internal mempunyai
alamat yang sama dengan RAM external, cara mengakses mikrokontroller
menyediakan instruksi untuk mengakses masing-masing RAM.
FF
Gambar 2.11 Peta Memori Data
Total memori program yang dapat dijangkau oleh Mikrokontroller
adalah 64Kilo-Byte atau dari alamat terendah 0000h sampai alamat
tertinggi FFFFh. Menghubungkan memori eksternal baik ROM atau RAM,
Menggunakan cara tersendiri dan kita bahas secara detail pada modul ini.
Gambar 2.12 Menghubungkan Memori Program Eksternal Dengan
Skema Kedua Seluruh Instruksi Diambil Dari Memori Eksternal
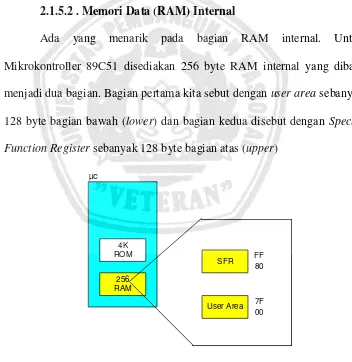
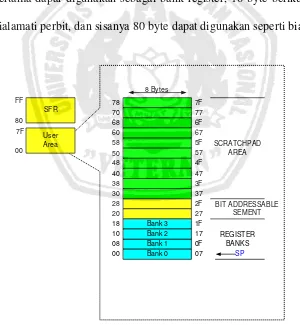
2.1.5.2 . Memori Data (RAM) Internal
Ada yang menarik pada bagian RAM internal. Untuk
Mikrokontroller 89C51 disediakan 256 byte RAM internal yang dibagi
menjadi dua bagian. Bagian pertama kita sebut dengan user area sebanyak
128 byte bagian bawah (lower) dan bagian kedua disebut dengan Special
Function Register sebanyak 128 byte bagian atas (upper)
Gambar 2.13 Organisasi RAM Internal
Pada 128 byte bagian bawah, perhatikan Gambar 2.13 32 byte
Instruksi pada program mengenalnya dengan sebutan R0 sampai R7. Dua
bit pada Program Status Word (PSW) digunakan untuk memilih bank
register yang digunakan. Penggunaan instruksi yang mengakses register
akan menghemat kode mesin dibandingkan dengan instruksi yang
mengakses lokasi secara langsung (direct addressing).
16 byte diatas bank register yaitu pada alamat 20h sampai 2Fh merupakan
daerah yang dapat dialamati secara bit. Alamat bit-bit pada daerah ini
adalah 00h sampai 7Fh.
Pendek kata, untuk RAM internal 128 byte bagian bawah, 32 byte
pertama dapar digunakan sebagai bank register, 16 byte berikutnya dapat
dialamati perbit, dan sisanya 80 byte dapat digunakan seperti biasa
SFR
Gambar 2.14 128 byte RAM Internal Bagian Bawah (Lower)RAM internal 128
menunjukan SFR untuk Mikrokontroller seri 89C51. SFR ini meliputi alamat
port, bit status dan kontrol, timer, register, stack pointer, akumularor dan lainnya.
Bagian-bagian yang kosong digunakan untuk pengembangan divais
Mikrokontroller selanjutnya.
Gambar 2.15 128 byte RAM Bagian Atas
2.1.6 Special Function Registers (SFR)
RAM internal 128 byte atas merupakan tempat register fungsi
khusus SFR untuk Mikrokontroller seri 89C51. SFR ini meliputi alamat
port, bit status dan kontrol, timer, register, stack pointer, akumulator dan
lainnya. Bagian-bagian yang kosong digunakan untuk pengembangan
divais Mikrokontroller selanjutnya. Fungsi dari masing-masing register
dijelaskan pada bagian berikut :
a) Accumulator
ACC merupakan register akumulator. Pada program ditulis dengan
b) Register B
Register B digunakan pada operasi perkalian dan pembagian. Pada
instruksi-instruksi yang lain berfungsi seperti register umumnya.
c) Program Status Word (PSW)
PSW berisi informasi status program.
d) Stack Pointer (SP)
Register SP (Stack Pointer) mempunyai lebar 8 bit. Nilai dari
register SP dan bertambah sebelum data disimpan selama
menjalankan instruksi PUSH atau CALL. Karena nilai register SP
dapat berada sembarang di 128 byte RAM internal bagian bawah
maka setelah kondisi reset nilai register SP akan diisi 07h. Hal ini
menyebabkan lokasi stack berada mulai dialamat 08h. Selama
program berjalan yakinkan bila stack pointer tidak menabrak data
anda atau tidak melebihi 7Fh
e) Data Pointer (DPTR)
DPTR terdiri dari high byte (DPH) dan low byte (DPL). Fungsi
utamanya adalah sebagai tempat alamat 16 bit. Register ini bisa
juga dimanipulasi sebagai sebuah register 16 bit atau 2 buah
register 8 bit yang berdiri sendiri.
f) Port 0 - 3
P0, P1, P2, dan P3 adalah SFR latch dari Port 0, 1, 2, dan 3.
g) Serial Data Buffer
Serial Data Buffer sebenarnya merupakan 2 register yang terpisah,
(untuk menerima data serial). Ketika data dipindahkan ke SBUF,
maka data akan menuju ke transmit buffer di mana data ditampung
untuk pengiriman serial. Memindahkan data ke SBUF berarti
menginisialisasi/memulai transmisi data secara serial. Sebaliknya
bila data dipindahkan dari SBUF, data tersebut berasal dari receive
buffer.
h) Register Timer
Pasangan register (TH0 & TL0), (TH1 & TL1), serta (TH2 & TL2)
adalah register 16.
2.1.7 Struktur dan Cara Kerja Port
Atmega8535 mempunyai 4 port bidirectional (Port 0 - Port 3),
yang masing-masing terdiri dari 8 bit. Setiap port terdiri dari sebuah latch
(Special Function Registers P0 sampai P3), sebuah output driver, dan
sebuah input buffer. Output driver Port 0 dan Port 2, serta input buffer
Port 0 digunakan untuk mengakses memori external. Untuk aplikasi yang
menggunakan memori external, maka Port 0 mengeluarkan 'low order
byte' alamat memori external (A0-A7), yang dimultipleks dengan data (1
byte) yang dibaca atau ditulis. Port 2 mengeluarkan 'high order byte'
alamat memori eksternal (A8-A15) bila alamat yang diperlukan sebanyak
16 bit. Bila alamat yang diperlukan hanya A0-A7 maka output Port 2
sama dengan isi SFR (Special Function Registers). Semua pin Port 3
mempunyai fungsi alternatif selain sebagai port. Fungsi alternatif tersebut
Tabel 2.1 Fungsi Alternatif Port 3
Fungsi alternatif hanya akan aktif bila bitbit yang bersesuaian pada
port SFR berisi '1'. Bila tidak maka output port akan terkunci pada low.
a. Konfigurasi I/O
Diagram latch dan I/O buffer tiap bit dari Port 0 - Port 3. Port 1,2, dan
3 mempunyai pull-up internal. Sedangkan Port 0, konfigurasi outputnya
adalah open drain. Setiap bit I/O ini berdiri sendiri, jadi dapat berfungsi
sebagai input atau output tanpa tergantung satu sama lain. Port 0 dan 2
tidak dapat dipakai sebagai I/O bila digunakan sebagai jalur alamat / data.
Bila port-port tersebut ingin difungsikan sebagai input, maka bit latch
harus berisi '1', yang akan mematikan output driver FET. Sehingga pin-pin
Port 1,2, dan 3 akan 'ditarik' ke high oleh pull-up internal, tetapi bila
diinginkan dapat juga 'ditarik' ke low dengan sumber external. Port 0 agak
PIN Fungsi Alternatif
P3.0 RXD (Port Input Serial)
P3.1 TND (Port Output Serial)
P3.2 INT0 (Interupt External)
P3.3 INT1 (Interupt External)
P3.4 T0 (Input Timer/Counter 0 External)
P3.5 T1 (Input Timer/Counter 1 External)
P3.6 WR (Sinyal Tulis Data Memory External)
berbeda, karena tidak menggunakan pull-up internal. FET pull-up pada
output driver P0 (lihat gambar 6A) hanya digunakan pada saat Port
mengeluarkan '1' selama akses memori external, selain keadaan ini FET
pull-up tidak aktif. Akibatnya bila bit-bit P0 berfungsi sebagai output
maka bersifat open drain. Penulisan logika '1' ke bit latch menyebabkan
kedua FET tidak bekerja, sehingga pin dalam keadaan mengambang
(floating). Pada kondisi ini pin dapat berfungsi sebagai high impedance
input. Port 1,2, dan 3 sering disebut dengan 'quasibidirectional' karena
mempunyai pull-up internal. Saat berfungsi sebagai input maka mereka
akan 'ditarik' ke high dan akan bersifat sebagai sumber arus bila 'ditarik' ke
low secara eksternal. Port 0 sering disebut sebagai 'true-bidirectional',
karena bila dikonfigurasikan sebagai input maka pinpinnya akan
mengambang. Pada saat reset semua port latch akan berlogika '1'.
b. Beban Port dan Antarmuka
Output buffer Port 1,2, dan 3 dapat dibebani 4 input LS TTL.
Bila port berfungsi sebagai input, maka dapat menerima output
opencollector atau open-drain, tetapi transisi '0' ke '1' tidak dapat
berlangsung dengan cepat. Output buffer Port 0 dapat dibebani dengan
8 input LS TTL. Bila Port 0 berfungsi sebagai port, maka diperlukan
pull-up external, kalau digunakan sebagai jalur alamat/data pull-up
tidak diperlukan.
c. Akses Memori
Mengakses memori external ada 2 macam : akses Program
Program Memory external menggunakan signal PSEN (Program Store
Enable) sebagai sinyal baca. Sedangkan untuk mengakses Data
Memory eksternal digunakan RD dan WR (fungsi alternatif P3.7 dan
P3.6) untuk membaca dan menulis ke memori. Membaca Program
Memory external selalu menggunakan alamat 16 bit. Sedangkan untuk
mengakses Data Memory external dapat menggunakan alamat 16 bit
(MOVX @DPTR) atau alamat 8 bit (MOVX @Ri). Pada saat alamat
16 bit digunakan, high byte dari jalur alamat dihasilkan oleh Port 2,
yang dipertahankan selama siklus pembacaan atau penulisan.
Perhatikan bahwa Port 2 mempunyai pull-up yang kuat selama
mengeluarkan bit alamat '1' (pada saat eksekusi instruksi MOVX
@DPTR). Pada saat ini latch Port 2 (SFR) tidak selalu berisi '1', dan
isi SFR Port 2 tidak berubah. Bila siklus memori external tidak segera
diikuti siklus memori external yang lain maka isi SFR Port 2 yang
tidak berubah tersebut akan muncul kembali pada siklus berikutnya.
Bila menggunakan alamat 8 bit (MOVX @Ri), isi SFR Port 2 tetap
sama dengan pin Port 2 selama siklus memori external. Karakteristik
ini memberikan kemampuan paging memori. Low byte dari alamat
bersifat timemultiplexed dengan data byte Port 0, artinya data dan
alamat dihasilkan oleh pin yang sama secara bergantian dengan selang
waktu tertentu. Sinyal alamat / data mengaktifkan kedua FET pada
output buffer Port 0 (lihat gambar 6A). Jadi dalam aplikasi ini pin-pin
Port 0 tidak bersifat sebagai output opendrain, dan tidak memerlukan
menyimpan address byte ke sebuah latch external. Address byte valid
pada saat transisi negatif ALE. Pada siklus penulisan, data yang akan
dituliskan muncul pada Port 0 tepat sebelum WR aktif, dan data ini
tetap ada sampai WR dinonaktifkan. Pada siklus pembacaan, data byte
diterima oleh Port 0 sesaat sebelum sinyal RD dinonaktifkan. Ada 2
kondisi untuk mengakses Program Memory external : 1. Pada saat
sinyal EA aktif, atau 2. Pada saat Program Counter (PC) berisi nilai
lebih besar dari 0FFFH (1FFFH untuk 89C52).
2.1.8 Catu Daya untuk Sistem Mikrokontroller
Kinerja sistem mikrokontroller sangat dipengaruhi pleh perangkat
catu daya yang digunakan. Oleh karena itu, untuk mendapatkan sistem
yang handal, diperlukan sistem catu daya yang stabil. Mikrokontroller
Atmega8535 menggunakan catu daya pada operasi normal dengan
tegangan DC 5V. Pada aplikasi sederhana, kita dapat menggunakan
regulator tegangan DC 5V berupa IC LM7805. Agar tegangan keluaran
pada pin 3 stabil pada 5V, maka tegangan masukkan pada pin 1 hendaklah
antara 7V hingga 24V. di pasaran, IC ini beredar dalam beberapa versi.
Untuk sistem dengan konsumsi daya hingga 1A, dapat digunakan LM7805
dengan kemasan TO-220 yang dilengkapi metal pendingin. Namun, jika
sistem yang dibuat hanya mengkonsumsi daya sekitar 50mA, maka dapat
menggunakan tipe LM7805 dengan kemasan TO-92 yang telah dapat
Gambar 2.16 Catu Daya Sederhana Untuk Mikrokontroller
2.1.9 7-segmen
7-segmen display adalah sebuah rangkaian yang dapat menampilkan
angka-angka desimal maupun heksadesimal. 7-segment display biasa
tersusun atas 7 bagian yang setiap bagiannya merupakan LED (Light
Emitting Diode) yang dapat menyala. Jika 7 bagian diode ini dinyalakan
dengan aturan yang sedemikian rupa, maka ketujuh bagian tersebut dapat
menampilkan sebuah angka heksadesimal.
Gambar 2.17 7-Segmen
7-segmen display membutuhkan 7 sinyal input untuk mengendalikan
setiap diode di dalamnya. Setiap diode dapat membutuhkan input HIGH atau
LOW untuk mengaktifkannya, tergantung dari jenis seven-segmen display
tersebut. Jika Seven-segment bertipe common-cathode, maka dibutuhkan
sinyal HIGH untuk mengaktifkan setiap diodenya. Sebaliknya, untuk yang
bertipe common-annide, dibutuhkan input LOW untuk mengaktifkan setiap
diodenya.
Salah satu cara untuk menghasilkan sinyal-sinyal pengendali dari
suatu seven segment display yaitu dengan menggunakan sebuah 7-segmen
decoder atau langsung di kodekan pada mikrokontroler. 7- segmen,
merupakan sekumpulan LED yang dibangun sedemikian rupa sehingga
menyerupai digit, 7-segmen ada dua macam: common anoda dan common
katoda.
Gambar 2.18 Rangkaian Interface ke 7-Segmen
Pada rangkaian tersebut dapat anda perhatikan bagian seven segmen,
karena seven segmen yang digunakan adalah common anoda, maka segmen
tersebut dapat nyala apabila mendapat logika '0' pada bagian katoda. Dengan
kata lain untuk menghidupkan seven segmen yang terkoneksi ke
mikrokontroler port paralel maka harus dioutputkan logika '0'.Sehingga pada
contoh tersebut, agar dapat ditampilkan angka 3 pada seven segmen maka
2.1.10 Relay
Relay adalah alat yang dioperasikan dengan listrik secara mekanis
mengontrol penghubungan rangkaian listrik, bermanfaat untuk kontrol jarak
jauh dan untuk pengontrolan alat tegangan dan arus tinggi dengan sinyal kontrol
tegangan dan arus rendah. Bekerja berdasarkan pembentukan elektromagnet
yang menggerakkan elektromekanis penghubung dari dua atau lebih titik
penghubung (konektor) rangkaian, sehingga dapat menghasilkan kondisi kontak
ON dan kondisi kontak OFF atau kombinasi dari keduanya.
Secara sederhana berikut ini prinsip kerja dari relay, ketika coil
mendapat energi listrik (energized) akan timbul gaya elektromagnet yang
akan menarik armature yang berpegas dan kontak akan menutup.
Gambar 2.20Skema Relay Elektromekanik
Selain berfungsi sebagai komponen elektronik, relay juga
menyimpan fungsi sebagai pengendali sistem. Sehingga relay mempunyai 2
macam simbol yang digunakan pada :
1) Rangkaian listrik (hardware)
2) Program (software)
Berikut ini simbol yang digunakan:
Gambar 2.21 Rangkaian dan Simbol Logika Relay Simbol
Salah satu kegunaan utama relay dalam dunia industri ialah untuk
implementasi loika kontrol dalam suatu sistem. Sebagai bahasa
pemrograman digunakan konfigurasi yang disebut ladder diagram atau relay
ladder logic. Berikut ini beberapa petunjuk tentang relay ladder logic
1. Diagram wiring yang khusus digunakan sebagai bahasa
pemrograman untuk rangkaian kontrol relay dan switching.
2. LD tidak menunjukkan rangkaian hardware, tapi alur berpikir.
3. LD bekerja berdasarkan aliran logika, bukan aliran tegangan/arus.
Relay ladder logic terbagi menjadi 3 komponen:
1. Input : Pemberi informasi
2. Logic : Pengambil keputusan
3. Output : Usaha yang dilakukan
2.2 Software
Software / perangkat lunak, adalah sekumpulan data elektronik
yang disimpan dan diatur oleh komputer, data elektronik yang disimpan
oleh komputer itu dapat berupa program atau instruksi yang akan
menjalankan suatu perintah. melalui sofware atau perangkat lunak inilah
suatu komputer dapat menjalankan suatu perintah. Software secara fisik
tidak ada wujudnya. Maka tidak bisa kita sentuh, tidak bisa kita pegang
namun kitadapat menjalankannya dalam sebuah sistem operasi dan Yang
hanya bisa kita pegang hanya media penyimpannya saja, seperti
disket,CD, dsb. Perangkat lunak memiliki fungsi tertentu juga, dan
biasanya untuk mengaktifkan perangkat keras. Bisa juga dikatakan
perangkat lunak bekerja di dalam perangkat keras.
2.2.1 Visual Basic 6.0
Visual Basic merupakan salah satu RAD (Rapid Application
Development) Tool yang sangat terkenal mudah untuk dipelajari,
Windows (98, ME maupun Win 2000). Bahkan, dengan adanya motto
yang diluncurkan oleh competitor Microsoft, SUN, yaitu "Write One Run
Everywhere" untuk produk andalannya SUN, yaitu Java, maka sekarang
telah banyak sekali vendor-vendor partner Microsoft yang mempermudah
anda untuk mengkonversi aplikasi VB anda yang jalan di Windows ke
platform lainnya, seperti Linux, AIX, dan masih banyak lagi. Tetapi untuk
bagian ini, saya tidak akan mengajak anda untuk melihat ke arah tersebut,
melainkan di sini saya akan memberikan anda materi-materi yang dibuat
sesingkat dan semudah mungkin agar anda dapat belajar dan menguasai
bahasa pemrograman visual ini dengan cepat.
Visual Basic menawarkan kepada anda untuk membuat User
Interface (antar muka pengguna) anda dalam waktu singkat sekali. Bagi
anda yang pernah bermain dengan C, Turbo Pascal, Turbo Basic, anda
tentu merasakan berapa banyak waktu yang anda habiskan untuk
mendesign User Interface anda sebelum anda konsentrasi ke flow program
anda (business logic).
Dengan melalui Visual Basic, konsep pengembangan aplikasi akan
dimulai dengan pembentukkan user interface, kemudian mengatur properti
dari objek-objek yang digunakan dalam user interface (warna tombol,
warna layar, judul layar, dll) , dan baru dilakukan penulisan kode program
untuk menangani kejadian-kejadian (event).
Visual basic pada dasarnya adalah bahasa pemrogaman computer.
Bahasa pemrograman adalah perintah-perintah atau intruksi yang
basic adalah salah satu bahasa yang wajib dipelajari oleh berbagai
kalangan, jika mereka ingin sukses di dunia computer.
2.2.1.1 Kelebihan Visual Basic 6.0
Sejak dikembangkan pada tahun 80-an, visual basic kini telah
mencapai versinya yang ke-6, beberapa keistimewaan utama dari basic 6
ini diantaranya seperti :
1. Menggunakan platform pembuatan program yang diberi nama
Developer Studio, yang memiliki tampilan dan sarana yang sama
dengan visual C++ dan visual J++. Dengan begitu kita dapat
bermigrasi atau belajar bahasa pemrograman lainnya dengan
mudah dan cepat, tanpa harus dari nol lagi.
2. Memiliki compiler andal yang dapat menghasilkan file executable
yang lebih cepat dan efisien dari sebelumnya.
3. Memiliki beberapa tambahan sarana Winzard yang baru.Winzard
adalah sarana yang memudahkan didalam pembuatan aplikasi
dengan mengotomatisasi tugas-tugas tertentu.
4. Tambahan kontrol-kontrol yang baru lebih cangggih serta
peningkatan kaidah struktur bahasa visual basic.
5. Kemampuan membuat active X dan fasilitas internet yang lebih
cepat.
6. Sarana akses data yang lebih cepat dan andal untuk membuat
aplikasi database yang berkemampuan tinggi.
7. Visual Basic 6 memiliki beberapa versi atau edisi yang sesuikan
2.2.2 ASSEMBLER
Bahasa assembly dikategorikan sebagai bahasa tingkat rendah
(low level languange). Bahasa assembly ini dikatakan bahasa tingkat
rendah karena notasinya untuk menggambarkan khusus sebagai bahasa
yang berorientasi pada machine dependent.
Dengan menggunakan sebuah perangkat tambahan, yaitu Linker,
dokumen yang berisi perintah-perintah tersebut bisa diolah agar dapat
dieksekusi.
Bahasa Assembly ini mampu menghasilkan program-program
dengan ukuran cukup kecil, mengingat cukup dekatnya bahasa ini dengan
bahasa mesin. Karena itulah kebanyakan virus yang menyerang dan
menempel pada program dibuat dengan menggunakan bahasa ini.
Adapun Peran Assembler sebagai berikut :
Gambar 2.22 Peran Assebler
Keterangan :
1. SETB = LED1, LED2, LED 3 menyala
2. CLR = LED1, LED2, LED3 mati
3. ACALL = ULANG Kembali ke point 1 dan begitu seterusnya
2.4 Program Monitor
Program monitor merupakan program yang bekerja di dalam
mikrokontroller dan menunggu perintah-perintah dari PC untuk beberapa
keperluan, antara lain:
1. Pengambilan program obyek yang di download oleh program
downloader di PC dan menyimpan ke target memori.
2. Eksekusi program obyek yang telah tersimpan di target
memori.
3. Edit program obyek yang telah tersimpan di target memori.
2.5 Sistem Pengalamatan
Dalam pembuatan program pada mikrokontroller, terdapat beberpa
jenis sistem pengalamatan yang perlu diketahui, antara lain:
2.5.1 Immediate Data (Pengalamatan Langsung)
Terjadi pada sebuah perintah ketika nilai Operand merupakan
data yang akan diproses. Contoh
2.5.2 Pengalamatan Data
Terjadi pada sebuah perintah ketika nilai Operand merupakan
alamat dari data yang akan diisi, dipindahkan atau diproses. Contoh :
Port 0 adalah salah satu I/O dari ATmega8535 yang mempunyai
alamat 80h.
2.5.3 Pengalamatan Tak Langsung
Terjadi pada sebuah perintah ketika salah satu Operand
merupakan register berisikan alamat dari data yang akan diisi atau
dipindahkan. Contoh perintah yang menggunakan sistem pengalamatan
tak langsung.
2.5.4 Pengalamatan Kode
Merupakan pengalamatan ketika Operand merupakan alamat
dari instruksi jump dan call (ACALL, JMP, LJMP, dan LCALL).
Biasanya Operand tersebut akan menunjuk ke suatu alamat yang telah
diberi label sebelumnya, seperti contoh berikut:
Mov P0,A
Mov @R0,A ;R0 digunakan sebagai register penyimpanan alamat
Mov A,@R1 ;R1 digunakan sebagai register penyimpanan alamat Mov @DPTR,A ;DPTR digunakan sebagai register penyimpanan alamat
BAB III
ANALISIS DAN PERANCANGAN SISTEM
Pada bab ini merupakan bagian perencanaan dan bagian pembuatan
perangkat lunak dan perangkat keras, yang akan dibahas tentang
langkah-langkah perencanaan dan pembuatan tugas akhir, yang merupakan pokok
bahasan utama dalam pembuatan tugas akhir ini
3.1 Analisis Sistem
Pada bab ini, dibuat perancangan dan pembuatan dari pengendalian
ruang inkubator bayi berbasis mikrokontroler dengan menggunakan
mikrokontroler. Bagian pembuatan perangkat lunak meliputi pemograman
Visual Basic 6.0 untuk user interface dan pemograman Assembly pada
mikrokontroler. Sedangkan untuk bagian pembuatan perangkat keras yang
meliputi perangkat mekanik serta perangkat elektronik. Pembuatan perangkat
mekanik terdiri dari desain mengenai miniature itu sendiri yaitu pembuatan
miniatur inkubator bayi berbasis mikrokontroler. Sedangkan pembuatan
perangkat keras pembuatan elektronik terdiri dari pembuatan rangkaian sistem
mikrokontroler, rangkaian sensor suhu LM35, rangkaian driver kipas.
Pada umum nya di rumah sakit atau pun di toko – toko alat medis
inkubator bayi hanyalah alat yang bisa mengatur suhu untuk kenyamanan bayi
yang lahir prematur. Dimana disini percobaan pembuatan pengendalian ruang
ada di jual belikan di luar sana.didalam percobaan ini dimana inkubator ini
berbasis mikrokontroler dan menggunakan sensor suhu dan dikendalikan oleh
seperangkat komputer ataupun leptop yang bisa di koneksikan dengan
inkubator tersebut dan terdapat suatu aplikasi untuk mengeset suhu didalam
inkubator tersebut dan merekapitulasi suatu inputan suhu yang pernah di
inputkan didalam inkubator tersebut.
3.2 Perancangan Sistem
Sub bab ini menjelaskan mengenai proses desain perangkat lunak yang
akan dibuat dan hardware yang digunakan. Proses desain sistem dalam
sub-bab ini akan dibagi menjadi beberapa tahap yaitu: alur umum sistem,
spesifikasi kebutuhan sistem, alur umum, flowchart program dekstop,
perancangan data, perancangan antarmuka dan perancangan hardware.
Aplikasi ini merupakan sistem yang bisa mempermudah pihak rumah
sakit atau puskesmas didaerah- daerah. Dimana para petugas atau perawat
yang bertugas bisa mengeset suhu dengan komputerisasi dan diman bisa
melihat data suhu yang sudah dipakek sebelumnya yang dimana fungsinya
untuk mengamati panas tidak nya suhu yang ada didalam inkubator dalam
jangka pajang. Adapun sub-sub perancangan yang akan dilakukan untuk
merancang sistem ini, sub perancangan tersebut meliputi :
Manajemen Umum :
1. Tambah, hapus, edit pengguna (operator).
Laporan :
1. Format laporan dapat ditampilkan berupa teks.
2. Laporan inputan suhu pada inkubator yang pernah diinputkan dan
tersimpan pada database.
Mekanisme dan Sistem pengedalian ruang inkubator bayi
1. Cek dan priksa semua yang ada didalam inkubator tersebut.
2. Mulailah buka aplikasi pengendali suhu yang ada dikomputer
atau leptop yang sudah konek dengan inkubator.
3. Inputkan suhu minimum sampai maksimum untuk pengedalian
suhu didalam inkubator tersebut.
4. setelah selesai menginputkan suhu inkubator tersebut sudah bisa
digunakan, dan si petugas atau perawat ingin melihat laporan
sebelumnya bisa langsung ditampilkan didalam hardcopy
maupun sofcopy
3.2.1 Alur Umum Sistem
Pada rancangan umum dari aplikasi ini adalah memudahkan perawat
didalam rumah sakit. Pembuatan inkubator bayi ini dengan pengoperasian
berbasis mikrokontroler Atmega8535 terdiri dari 2 bagian yaitu pembuatan
perangkat keras (hardware) dan perangkat lunak (software).
Gambar 3.1 Diagram system alur pengendali ruang inkubator bayi.
Cara kerja dari pengendali ruang inkubator bayi berbasis
mikrokontroler adalah suatu inputan suhu aplikasi yang ada di dikomputer
yang dimana dikirimkan ke sebuah mikrokontroler dan dijalankan nya ke
driver lampu untuk memberikan suatu suhu panas sesuai inputan yang telah
dimasukan di komputer tersebut dan jika suhu didalam ruang inkubator
tersebut panas maka kipas yang dipasang di inkubatornya akan bekerja untuk
mendinginkan didalam ruang inkubator tersebut.
3.2.2 Flowchart Diagram
Perancangan flowchart digunakan untuk menggambarkan sejumlah
proses terstruktur dalam sistem, berorientasikan pada aliran proses yang
terjadi. Demi memudahkan pembaca orang awam dalam mengerti isi dari
aplikasi ini. Adapun perancangan aplikasi pengendali ruang inkubator
berbasis mikrokontroler ini adalah sebagai berikut: Databas
Inisialisasi port mikrokontroler
Setting suhu Pada sensor LM35
Lampu nyala
Kipas berputar Jka suhu diatas yang diinputkan
Cek laporan data suhu dlm wktu yg Sudah ditentukan
end star
Y
T
Gambar 3.2 Flowchart Alur Mikrokontrolel pada inkubator
3.2.2.1Flowchart Untuk Login
Login hanya bisa dilakukan oleh pegawai (operator). Login ini
dilakukan oleh pegawai yang akan melaksanakan tugasnya sebagai operator
untuk mengecek suhu pada inkubator yang di cocokan pada data base.
Gambar 3.3 Flowchart Login Pada Aplikasi
3.2.3 Kebutuhan Perancangan Hardware pengendali ruang inkubator bayi
Dalam pembuatan inkubator ini komponen-komponen yang dibutuhkan
adalah sebagai berikut:
Sensor suhu LM35
Mikrokontoler ATmega8535
1. Relay
2. Pararel Port.
3. Akrilik
4. lampu.
5. Kipas
Y
T Start
Username & Password
Validasi
Form Aplikasi Valid
3.3 Cara Merancang alat
Merancang pengendali ruang inkubator bayi berbasis mikrokontroller
bukanlah suatu hal yang mudah dan tidak dapat dilakukan oleh banyak kalangan.
Dalam menjalani Tugas Akhir ini penulis ingin memaparkan bagaimana cara
merancang alat atau mesin ini.
Pertama, membeli semua komponen-komponen yang diperlukan dalam
pembuatan inkubator bayi ini. Setelah membeli semua komponennya, kemudian
mendesign miniaturnya.
Kedua, setelah mendesign alat, kemudian merakit komponen-komponen yang
sudah ada ke PCB (Printed Circuit Board). Setelah itu untuk menyatukan rangkaian
komponen dan motor diperlukan sebuah akrilik sebagai rangka dari mesin ini.
Ketiga, untuk menghubungkan Mikrokontroller ke ke komputer maka
digunakan pararel port sebagai penghubungnya.
Keempat, menguji coba hasil keseluruhan rangkaian inkubator bayi dengan
menginputkan suhu – suhu tertentu.
3.4 Diagram Berjenjang
Dari analisa gambar didapatkan gambaran dari aplikasi secara
Pengendali ruang inkubator
Sensor Suhu LM35
Lampu Kipas
Gambar 3.4 diagram berjenjang dari aplikasi pengendali ruang inkubator bayi
3.4.1 Context Diagram
Merupakan pengembangan proses yang tertinggi dalam tingkatan
(level) dan berhubungan dengan beberapa entity yang terlibat langsung
dengan pengolahan data dalam sistem yang dibuat. Context diagram yang
dimaksud mengacu pada Gambar 3.6 dimana proses terhubung dengan 2 (dua)
entity yaitu petugas dengan aplikasi inkubator.
setting suhu
3.4.2 Entity Relationship Diagram
Entity relationship diagram (ERD) merupakan suatau rancangan
pemodelan struktur database yang akan dibuat dengan menunjukkan
hubungan atau relasi yang terjadi. Ada 2 macam perancangan ERD yang
digunakan dalam penyusunan tugas akhir ini. Pada perancangan data ini
menjelaskan tentang 2 model data yaitu : Model Data Konseptual/ Conceptual
Data Model dan Model Data Fisik/ Physical Data Model. Untuk lebih
jelasnya akan dijelaskan dibawah ini.
3.4.3 CDM (Conceptual Data Model)
Model data konseptual pada aplikasi ini mempresentasikan rancangan
basis data konseptual di aplikasi. Berikut ini model data konseptual yang
digambar dengan menggunakan perangkat lunak Power Designer 12, lebih
jelasnya perhatikan Gambar 3.7 berikut ini.
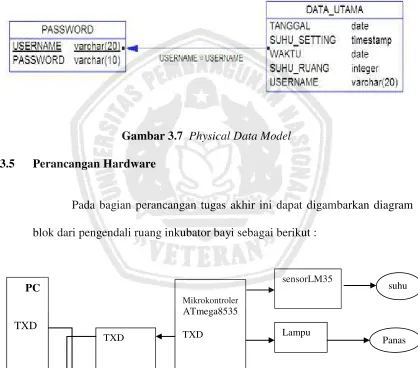
3.4.4 PDM (Physical Data Model)
Model data ini dibuat dengan cara me-generete diagram model data
konseptual di atas. Diagram data fisik ini menghasilkan tabel-tabel yang akan
digunakan dalam implementasi database pada aplikasi.
Gambar 3.7 Physical Data Model
3.5 Perancangan Hardware
Pada bagian perancangan tugas akhir ini dapat digambarkan diagram
blok dari pengendali ruang inkubator bayi sebagai berikut :
Gambar 3.8 Diagram blok pengendali ruang inkubator bayi
Pada Gambar di atas dapat diketahui hardware terhubung pada
komputer (PC) menggunakan komunikasi serial RS 232, sehingga pada
hardware tersebut juga memerlukan sebuah input/output serial RS 232 sebagai
penerjemah agar dapat berkomunikasi dengan komputer. Data yang telah
didapat kemudian diteruskan dengan Mikrokontroler ATmega8535 dan
kemudian diproses dengan tampilan di layar apliakasi di pc sebagai layar
untuk pemberitahuan suhu yang berada didalam ruang inkubator, lampu yang
ada didalam inkubator untuk memanaskan ruangkan untuk mencapai suhu
yang di inginkan. Sedangkan kipas berfungsi untuk mendinginkan suhu
ruangan yang ada didalam inkubator tersebut.
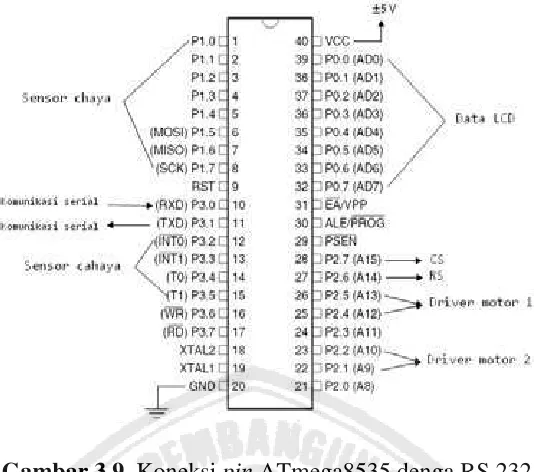
3.5.1 Perancangan Mikrokontroler ATmega8535 dengan RS232
Adapun rancangan penggunaan mikrokontroler khususnya
penggunaan port-port pada mikrokontroler ATmega8535 yang nantinya akan
terhubung dengan serial RS 232, rancangan ini memudahkan pengerjaan yang
nantinya akan diterapkan pada mikrokontroler.
Pada port-port tertetu sudah disediakan beberapa bagian yang khusus
untuk menjalan hardware yang nantinya diisi program yang berfungsi
Gambar 3.9 Koneksi pin ATmega8535 denga RS 232
Pada Gambar dapat diketahui bahwa perancangan hardware untuk
realisasi tugas akhir ini menggunakan modul utama berupa minimum sistem
ATmega8535. Berikut adalah tabel fungsi kaki mikrokontroler yang
digunakan:
3.5.1.1Sistem Pemanasan
Miniatur pengendalian ruang inkubator bayi ini akan dipanasi oleh
sebuah 1 buah lampu dengan daya listrik 5 watt dimana lampu ini berfungsi
untuk menghangatkan ruangan didalam inkubator tersebut. Sehingga bayi
yang ada didalam sebuah inkubator tesebut tidak terlalu panas dan sistem
dikendalikan oleh aplikasi didalam pc. Jika didalam inkubator itu panas maka
kipas yang ada didalam inkubator tersebut akan membuang udara panas
keluar dari dalam inkubator tersebut.
3.5.1.2Input Sensor
Sensor yang digunakan didalam inkubator bayi, di miniatur dipasang
sensor sebanyak 1 sensor, sensor dipasang didalam ruang inkubator yang
tersambung oleh mikrokontroler sehingga suhu didalam inkubator bisa
dikendalikan dan dipantau oleh apliaksi yang sudah diinstal didalam PC.
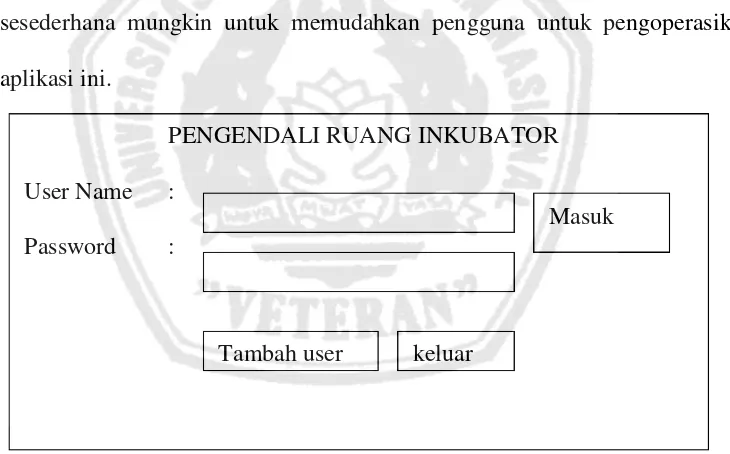
3.6 Perancangan Antarmuka Perangkat Lunak
Perancangan antarmuka merupakan perancangan halaman aplikasi
yang akan berinteraksi langsung dengan pengguna, rancangan ini didesain
sesederhana mungkin untuk memudahkan pengguna untuk pengoperasikan
aplikasi ini.
Gambar 3.10 Form Login
Setelah berhasil melewati login operator akan memasuki form utama,
dalam menu form utama operator sebagai masuk menu sistem inkubator
untuk masuk ke menu lain nya berikut adalah skema form menu utama
PENGENDALI RUANG INKUBATOR
User Name :
Password :
Tambah user keluar
Gambar 3.11Form Menu Utama
Didalam menu utama terdapat pilihan menu yaitu pengawasan,laporan dan exit.
Didalam menu pengawasan ini merupakan sistem setting dan penginputan suhu yang
akan digunakan didalam inkubator tersebut dan penyentingan kemikrokontroler.
Gambar 3.12 Sistem Stand by inkubator SISTEM PENGAWASAN INKUBATOR
PENGAWASAN
LAPORAN
KELUAR
SISTEM STANDBAY INKUBATOR
CAMERA suhu incubator suhu setting incubator
Setting suhu Setting port
TURN ON
Laporan hasil dari pengawasan inkibator tersebut akan di simpan didatabase acces
yang dimana data akan ditampilkan sebagai berikut :
BAB IV
IMPELEMENTASI SISTEM
Pada Bab IV ini akan dibahas mengenai implementasi dari rancangan
sistem yang telah dibuat pada bab III. Bagian implementasi sistem kali ini
meliputi lingkungan implementasi, implemantasi data, implementasi proses,
implementasi antar muka, dan impelementasi alat peraga.
4.1 Implementasi Lingkungan
Pada bagian ini akan dijelaskan mengenai perangkat keras dan
perangkat lunak yang digunakan pada implementasi sistem kali ini.
Perangkat keras :
- 1 buah laptop berprosesor Intel Celeron M A135 1.60 Ghz .
- SDRAM DDR2 1000 GB PC-5300
- Harddisk 100 GB
Perangkat perangkat lunak :
- Sistem operasi Microsoft Windows XP Professinal service pack 2.
- Assembly sebagai bahasa pemograman untuk memprogram mikrokontroler.
- Microsoft Visual Basic 6.0 sebagai bahasa pemograman yang digunakan
untuk aplikasi.
- Microsoft Office Access 2003 untuk menyimpan dan mengolah semua data di
dalam aplikasi ini.