SKRIPSI
Diajukan oleh :
Fir man ayr osy
0836010008
J URUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
JAWA TIMUR
SKRIPSI
Oleh :
FIRMAN AYROSY
0836010008
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
J AWA TIMUR
SKRIPSI
Diajukan Untuk Memenuhi Sebagai Persyaratan Dalam Memperoleh Gelar Sarjana Komputer
Program Studi Teknik Informatika
Disusun oleh :
FIRMAN AYROSY
0836010008
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
J AWA TIMUR
ALAT PENGAYAK TEPUNG TERIGU OTOMATIS
BERBASIS MIKROKONTROLERATmega16
Disusun oleh :
FIRMAN AYROSY
0836010008
Telah disetujui mengikuti Ujian Negara Lisan Periode III Tahun Akademik 2012/2013
Pembimbing I
Har ianto, S.Kom, M.Eng NPT.
Pembimbing II
Fetty Tr i Anggr aeny, S.kom, M, Kom NPT. 3 8202 0602081
Mengetahui,
Ketua Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” J awa Timur
BERBASIS MIKROKONTROLERATmega16
Disusun Oleh :
FIRMAN AYROSY
0836010008
Telah dipertahankan dan diterima oleh Tim Penguji Skripsi Program Studi Teknik Informatika Fakultas Teknologi Industri
Universitas Pembangunan Nasional ”Veteran” Jawa Timur Pada Tanggal 4 Oktober 2013
Universitas Pembangunan Nasional ”Veteran” Jawa Timur
PANI TIA UJ I AN SKRIPSI / KOMPREHENSI F
KETERANGAN REVISI
Kami yang bertanda tangan di bawah ini menyatakan bahwa mahasiswa berikut : Nama : Firman Ayrosy
NPM : 0836010008
Jurusan : Teknik Informatika
Telah mengerjakan revisi / tidak ada revisi*) pra rencana (design) / skripsi ujian lisan gelombang I , TA 2013/2014 dengan judul:
Puji syukur kepada Allah SWT yang telah memberikan rahmat dan karunia-Nya, sehingga peneliti dapat menyelesaikan Laporan Tugas Akhir (skripsi) yang berjudul :
“
ALAT PENGAYAK TEPUNG TERIGU OTOMATIS
BERBASIS MIKROKONTROLER ATmega16A
”Laporan Tugas Akhir (skripsi) disusun sebagai syarat untuk menempuh Kelulusan di Fakultas Teknologi Industri Jurusan Teknik Informatika Universitas Pembangunan Nasional “Veteran” Surabaya Jawa Timur.
Laporan Tugas Akhir (skripsi) ini memberikan peneliti kesempatan untuk lebih memperdalam ilmu yang diperoleh selama masa perkuliahan dan untuk mengimplementasikannya dalam kehidupan sehari-hari.
Dengan selesainya Laporan Tugas Akhir (skripsi) ini tidak terlepas dari bantuan banyak pihak yang telah memberikan masukan-masukan kepada peneliti. Untuk itu peneliti mengucapkan terima kasih kepada :
1. Bapak Ir. Sutiyono. MT selaku Dekan Fakultas Teknologi Industri UPN “Veteran” Jawa Timur.
2. Ibu Dr. Ir. Ni Ketut Sari, MT selaku Ketua Jurusan Teknik Informatika UPN “Veteran” Jawa Timur.
4. Ibu Fetty Tri Anggraeny, S.Kom, M.Kom selaku dosen Pembimbing II yang telah banyak memberikan masukan dalam bimbingan, dorongan serta kritik yang bermanfaat bagi peneliti sejak awal hingga terselesainya laporan Laporan Tugas Akhir (skripsi) di UPN “Veteran” Jawa Timur.
5. Sahabat – sahabat ALU dan Ilmu Komputer. Altaf, Rio, Bagus, Faza, Pepenk, Arul, Anas, Oyang, Yudha, Ericka, Hadi, Rizky, Heldan, Nanang, Ferry, dan Elvin yang telah mendukung, membantu peneliti selama kuliah, mengerjakan tugas, UTS, UAS, PKL, sampai tugas akhir (skripsi) ini. Dan kepada sahabat – sahabat ex-Ilmu Komputer, Rendra, Banu, Dito, Novan, Huda, Elit, Aditya, dan Alter. Peneliti tidak dapat memberikan sesuatu yang berarti untuk kalian, hanya ucapan kata yang tulus “Terima Kasih Banyak”. Semoga kesuksesan dan kebahagiaan bersama kita, Dulur. Kalian LUAR BISA!!! .
6. Teman – teman peneliti yang tidak pernah lelah mendoakan, memberikan semangat, support, hingga meminjami buku referensi kepada peneliti. Marie, Amico, Ida, Prapti, teman seangkatan TF, buat teman – teman elektro di kampus STIKOM yang selalau memberikan solusi setiap saya menemukan kesulitan pada rangkaian, dan semuanya yang tidak bisa peneliti sebutkan satu per satu. Terima kasih banyak,Kawan. Semoga kesuksesan dan kebahagiaan menyertai langkah kita.
semoga dapat bermanfaat.
Surabaya, Oktober 2013
ii
ABSTRAK……….. i
DAFTAR ISI... ii
DAFTAR GAMBAR... v
DAFTAR TABEL... viii
BAB I: PENDAHULUAN………. 1
1.1 Latar Belakang……… 1
1.2 Rumusan Masalah……….. …. 2
1.3 Batasan Masalah……… …. 3
1.4 Tujuan……….. 3
1.5 Manfaat……… 4
1.6 Metodologi Penelitian……… 4
1.7 Sistematika Penulisan………. 5
BAB II : TINJ AUAN PUSTAKA………. 7
2.1 Pengenalan Mikrokontroler... 8
2.1.1 Fiur – Fitur Mikrokontroler ATmega16A……… 9
2.1.2 Arsitektur Mikrokontroler ATmega16A……….. 10
2.1.3 Konfigurasi pin ATmega16………. 11
2.1.4 Organisasi Memory……….. 16
2.2 Sensor Infra Red... 18
2.3 Keypad ………... 21
iii
2.5.1 Mekanisme Kinerja Motor DC……… 28
2.5.2 Komponen Utama Motor DC………. 29
2.5.3 Jenis Motor DC………. 30
2.6 LCD Display………... 32
2.6.1 Penulisan Data Register Perintah LCD………. 34
2.6.2 Pembacaan Data Register Perintah LCD………. 34
2.6.3 Penulisan Data Register Data LCD……….. 35
2.6.4 Pembacaan Data Register Data LCD……….. 35
2.7 Codevision... 36
2.7.1 Bagian-bagian codevisionAVR... 37
2.7.2 Pemilihan chip dan frekwensi xtall... 39
2.7.3 Inisialisasi LCD port I/O... 39
2.8 USBasp downloader... 40
BAB III : ANALISA DAN PERANCANGAN... 44
3.1 Metode Dan Perancangan…... 44
3.1.1 Kebutuhan Hardware... 44
3.1.2 Miniatur………... 45
3.1.3 Proses Pengayakan Tepung Terigu………. 47
3.2 Deskripsi Sistem... 47
3.3 Perancangan Sistem... 48
3.3.1 Alur Umum Sistem... 49
iv
3.4 Cara Merancang Alat……… 54
3.4.1 Analisa Perancangan Perangkat Keras………. 55
3.4.2 Analisa Perancangan Perangkat Lunak……….... 58
BAB IV : HASIL DAN PEMBAHASAN………... 62
4.1 Implementasi Dan Alat – Alat yang Digunakan... 62
4.1.1 Perangkat Keras... 62
4.2.7 Implementasi Software Di Microkontroler………. 68
4.3 Pengujian Alat………... 76
4.3.1 Uji Coba USBisp……….. 76
4.3.2 Pengujian Mikrokontroler ATmega 16A……… 77
4.3.3 Pengujian Keseluruhan……… 77
4.4 Pengujian Alat Pengayak Tepung…………... 78
4.4.1 Inialisasi MotorDC……… 78
v
BAB VI : KESIMPULAN DAN SARAN... 85
5.1 Kesimpulan... 85
5.2 Saran... 86
Judul : Alat Pengayak Tepung Terigu Berbasis Mikrokontroler.
Pembimbing 1 : Harianto, S.Kom. M.Eng.
Pembimbing 2 : Fetty Tri Anggraeny S.Kom, M. Kom Penyusun : Firman Ayrosy
ABSTRAK
Seiring dengan perkembangan teknologi sekarang ini mengalami kemajuan yang sangat pesat. Khususnya di bidang elektronika , segala aspek kehidupan manusia saat ini dan mendatang tidak akan lepas dari perkembangan
teknologi ini.
Bahkan di dunia kuliner tidak lepas dari perkembangan teknologi, alat pengayak tepung terigu perlu untuk di kembangkan secara teknologi, dengan Sistem pengayakan yang dilakukan oleh komputer di harapkan proses pengayakan akan menjadi lebih baik, cepat, tepat, praktis,efisien waktu dan masih banyak lagi keuntungan lain yang didapatkan dari pada menggunakan cara manual. Dari beberapa keuntungan tersebut dapat dijadikan syarat untuk mewujudkan “Alat
Pengayak Tepung Terigu Berbasis Mikrokontroler ATmega16”.
Pengayak Tepung Terigu oleh alat mikrokontroler ini adalah
mengandalkan proses putaran motor DC yang bisa di atur kecepatan putarannya
dan sensor infra red untuk mengecek laju masuk tepung terigu. Secara umum alat
ini telah dilengkapi oleh rangkaian pembantu sensor untuk mengecek masuk objek
tepung, dan motor DC untuk proses pengayakan secara hardware maupun
software sehingga dengan Tugas Akhir ini diharapkan dapat memberi ide untuk mengoptimalkan penerapan ilmu computer di dunia kuliner.
PENDAHULUAN
1.1 Latar Belakang
Seiring dengan perkembangan teknologi sekarang ini mengalami
kemajuan yang sangat pesat. Khususnya di bidang elektronika , segala aspek
kehidupan manusia saat ini dan mendatang tidak akan lepas dari perkembangan
teknologi ini. Berbagai macam kebutuhan sehari hari kita sudah menggunakan
teknologi, di dalam dunia kuliner lebih khususnya dalam dunia kue,
penggunaan tepung terigu sangat central dan sangat penting dalam campuran
adonan hampir semua tipe jenis kue berbahan dasar tepung terigu, akan tetapi
dalam kemasannya tidak semua tepung terigu mempuyai tingkat kehalusan yang
sama, maka tidak mengherankan jika banyak kejadian kue yang dibuat tidak
seperti yang kita inginkan dikarenakan tingkat kehalusan tepung terigu yang
dicampur tidak kita perhatikan, sehingga berpengaruh pada adonan bahkan hasil
kue yang dibuat. Tepung terigu secara fisik berjenis butiran halus kecil dan bisa
di katakan seperti bubuk akan tetapi untuk tingkat kehalusan bubuk berbeda
beda mengingat banyak aspek yang menjadi faktor yang berpengaruh dalam
tingkat kehalusan tepung itu sendri yaitu saat pengemasan tepung terigu, suhu
atau temperatur saat penyimpanan tepung terigu dan keadaan kemasan tepung
terigu.
Dari beberapa faktor tersebut terkadang tepung yang dibeli tidak sesuai yang
kita inginkan tingkat kehalusannya,maka dari itu banyak para koki atau ibu- ibu
yang ingin membuat kue harus menyediakan alat pengayak tepung untuk
yang di inginkan, dalam proses ini kita harus mengayak kembali tepung yang
ingin di olah sampai mendapatkan tigkat kehalusan yang di inginkan dan secara
otomatis proses ini memerlukan waktu ekstra di karenakan proses ini masih
dilakukan secara manual dan membutuhkan waktu untuk mendapatkan hasil
yang baik
Maka dari itu, dari sini dibuat alat pengayak tepung terigu yang berbasis
mikrokontroler. Prinsip kerja alat ini adalah menyeting terlebih dahulu untuk
timer dan tingkat kecepatan motor DC sebelum alat di gunakan, setelah itu
apabila sensor infra red mendeteksi adanya bahan tepung terigu masuk dalam
wadah tepung, data di terima oleh mikrokontroler, data tersebut akan
dikeluarkan untuk menjalankan motor DC untuk mengayak dengan waktu dan
kecepatan mengayak yang sudah di tentukan dan pengayak akan berhenti sesuai
settingan yang diatur.
1.1 Rumusan masalah
Dalam Penjelasan yang telah di sampaikan pada Latar Belakang di atas, dapat dirumuskan permasalahan alat pengayak tepung otomatis berbasis
mikrokontroler untuk saat ini adalah sebagai berikut:
a. Bagaimana cara kerja alat ini dengan menggunakan sensor infra red untuk
mendeteksi masuknya tepung terigu
b. bagaimana kita menggunakan motor DC dengan mengatur tingkat kecepatan
motor sesuai keinginan pengguna
c. Bagaimana membuat alat yang bisa memisahkan tepung terigu secara efisien
1.2 Batasan Masalah
Untuk menfokuskan penelitian dan memperjelas penyelesaian sehingga mudah dipahami dan penyusunannya lebih terarah, maka dilakukan pembatasan masalah sebagai berikut :
1. Penggunaan sensor infra red dan poto diode sebagai pendeteksi masuknya tepung terigu dalam wadah
2. Sebuah alat mikrokontroler ATMega16 digunakan sebagai pengolah data untuk memberi perintah pada motor DC dan timer.
3. Penggunaan software AVRCodeVision C compiler untuk pembuatan program pada mikrokontroller dengan bahasa C.
4. penggunaan motor DC untuk penggerak alat pengayak tepung
5. pemanfaatan media timer yang di sediakan pada program untuk memberi jarak waktu dalam proses pengayakan
1.3 Tujuan
Tujuan dari Tugas Akhir ini adalah :
a. Mengetahui cara kerja sensor infra red untuk mendeteksi masuknya tepung terigu dalam wadah dengan memanfaatkan system kerja dari sensor.
c. Dapat membuat sebuah alat yang bisa memisahkan tepung terigu dengan
design secara mekanik dan mikrokontroler sehingga proses pemisahan tepung lebih efisien waktu
1.4 Manfaat
Adanya penelitian ini diharapkan dapat bermanfaat :
1. Dengan dibuatnya alat ini maka dapat memilah tepung yang halus dengan tepung yang kasar atau yang menggumpal
2. Dapat memberi efisien waktu dalam pengerjaanya dan lebih aplikatif
1.5 Metodologi Penelitian
Metode penelitian yang digunakan dalam pembuatan sistem
mikrokontroler ini melalui percobaan langsung jika gagal maka akan terus dicoba lagi atau trial error Dan untuk melakukan penelitian tersebut, berikut tahap - tahapanya :
a. Metode Studi Literatur
Mengumpulkan referensi baik dari internet, buku maupun sumber-sumber lainnya serta mencari tools yang diperlukan untuk membuat simulasi tersebut sebagai tambahan referensi Tugas Akhir ini.
b. Metode Perancangan dan Pembuatan Aplikasi
c. Metode Uji coba alat dan evaluasi
Pada tahap ini setelah selesai dibuat maka dilakukan pengujian alat untuk mengetahui apakah sistem tersebut telah bekerja dengan benar sesuai dengan konsep yang diajukan atau tidak.
d. Metode Kesimpulan
Pada tahap ini dalam bagian akhir pembuatan Tugas Akhir. Dibuat kesimpulan dan saran dari hasil pembuatan sistem simulasi yang diperoleh sesuai dengan dasar teori yang mendukung dalam pembuatan konsep tersebut yang telah dikerjakan secara keseluruhan.
e. Metode Penyusunan buku Laporan
Pada tahap ini merupakan tahap akhir dari pengerjaan Tugas Akhir. Buku ini disusun sebagai laporan dari seluruh proses pengerjaan Tugas Akhir, dari penyusunan buku ini diharapkan dapat memudahkan pembaca yang ingin menyempurnakan dan mengembangkan sistem simulasi lebih lanjut.
1.6 Sistematika Penulisan
BAB I : PENDAHULUAN
Bab ini berisi Latar Belakang, Rumusan Masalah, Batasan Masalah, Tujuan, Manfaat, Metodologi Penulisan, dan Sistematika Penulisan Skripsi.
BAB II : TINJ AUAN PUSTAKA
menyangkut alat pengayak tepung terigu, konsep dasar
mikrokontroler, konsep dasar komunikasi serial dengan komputer.
BAB III : METODE DAN PERANCANGAN SYSTEM
Bab ini berisi tentang metode penelitian dimana apa saja yang perlu di analisa dan digunakan yang meliputi : kebutuhan data, kebutuhan hardware dan software, kebutuhan proses, perancangan sistem yang berbasis
mikrokontroler, serta analisa dan desain sistem yang telah dibuat sebelumnya.
BAB IV HASIL DAN PEMBAHASAN
Bab ini menjelaskan tentang gambaran objek penelitian, penyajian data dan interprestasi data serta Analisis data dan inteferensi dari alat yang di buat
BAB V : KESIMPULAN DAN SARAN
TINJ AUAN PUSTAKA
Bab ini akan menjelaskan dari bagian – bagian peralatan yang digunakan yang menyangkut kebutuhan hardware dan kebutuhan software dalam pembuatan alat pengayak tepung otomatis berbasis mikrokontroler.
2.1Pengenalan Mikrokontroler
Pada saat ini penggunaan mikrokontroler dapat kita temui pada berbagai peralatan, misalnya peralatan yang terdapat di rumah, seperti telepon digital, microwave oven, televisi, mesin cuci, sistem keamanan rumah, PDA, dll.
Mikrokontroler dapat kita gunakan untuk berbagai aplikasi misalnya untuk pengendalian, otomasi industri, telekomunikasi, dan lain-lain. Keuntungan menggunakan mikrokontroler yaitu harganya murah, dapat di program berulang kali, dan dapat kita program sesuai dengan keinginan kita. Saat ini keluarga
mikrokontroler yang ada dipasaran yaitu Intel 8048 dan 8051(MCS 51), Motorola 68HC11, Microchip PIC, Hitachi H8, dan Atmel AVR.
Salah satu mikrokontroler yang banyak digunakan saat ini yaitu
AVR memiliki keunggulan dibandingkan dengan mikrokontroler lain, keunggulan mikrokontroler AVR yaitu AVR memiliki kecepatan eksekusi program yang lebih cepat karena sebagian besar instruksi di eksekusi dalam 1 siklus clock, lebih cepat dibandingkan dengan mikrokontrolerMCS51 yang memiliki arsitektur CISC (Complex Intruction Set Compute) dimana mikrokontroler MCS51
membutuhkan 12 siklus clock untuk mengeksekusi 1 intruksi. Selain itu,
mikrokontroler AVR memiliki fitur yang lengkap (ADC Internal, EEPROM Internal, Timer/Counter, Watchdog Timer, PWM, Port I/O, Komunikasi Serial, Komparator, I2C, dll), sehingga dengan fasilitas yang lengkap ini, programmer
dan desainer dapat menggunakannya untuk berbagai aplikasi sistem elektronika seperti robot, otomasi industri, peralatan telekomunikasi, dan berbagai keperluan lain.
Pemrograman mikrokontrolerAVR dapat menggunakan low level language
(assembly) dan high level language (C, Basic, Pascal, Java, dll) tergantung
compiler yang digunakan. Bahasa Assembler mikrokontroler AVR memiliki kesamaan intruksi, sehingga jika pemrograman satu jenis mikrokontroler AVR
sudah dikuasai, maka akan dengan mudah menguasai pemrograman keseluruhan
mikrokontroler jenis AVR, namun bahasa assembler relative lebih sulit dipelajari dari pada bahasa C, untuk pembuatan suatu proyek yang besar akan memakan waktu yang lama, serta penulisan programnya akan panjang. Sedangkan Bahasa C memiliki keunggulan di banding bahasa assembler yaitu independent terhadap
hampir semua operasi yang dapat dilakukan oleh bahasa mesin, dapat dilakukan oleh bahasa C dengan penyusunan program yang lebih sederhana dan mudah.
2.1.1 Fitur-fitur Mikrokontroler ATmega16A
Mikrokontroler adalah mikroprosesor yang dirancang khusus untuk aplikasi kontrol, dan dilengkapi dengan ROM, RAM dan fasilitas I/O pada satu chip. ATmega16A adalah salah satu anggota dari keluarga ATmega. ATmega16A
dirancang oleh Atmel sesuai dengan instruksi standar dan susunan pin 80C5. Fitur-fitur yang dimiliki ATmega16A sebagai berikut:
1. Sistem mikrokontroler 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
2. Memiliki memori flash 8 KB, SRAM sebesar 1 kbyte dan EEPROM
(Electrically Erasable Programmable Read Only Memory) sebesar 512
byte.
3. Memiliki ADC (Analog Digital Converter) internal dengan ketelitian 10 bit sebanyak 8 saluran.
2.1.2 Ar sitektur mikrokontroler ATmega16A
Gambar 2.1. Blok Diagram AVR ATmega16A
Dari gambar blok diagram gambar 2.1 dapat dilihat bahwa ATmega16A
memiliki bagian-bagian sebagai berikut :
3. SRAM sebesar 1 kbyte.
4. Flash memory sebesar 16kb yang memiliki kemampuan Read While Write.
5. EEPROM sebesar 512 byte dapat diprogram selama beroperasi. 6. Tiga buah timer/counter dengan kemampuan pembanding. 7. Two wire serial Interface.
8. Port antarmuka SPI.
9. Unit interupsi internal dan eksternal. 10. PortUSART untuk komunikasi serial. 11. ADC 10 bit sebanyak 8 saluran.
12. Watchdog Timer dengan osilator internal. 13. Antarmuka komparator analog.
2.1.3 Konfigurasi pin ATmega16A
Gambar 2.2. Konfigurasi Pin ATmega16A.
Berikut adalah penjelasan fungsi tiap kaki dari gambar 2.2
a. Port A
Merupakan 8-bit directionalport I/O. Setiap pinnya dapat menyediakan
internal pull-up resistor (dapat diatur per bit). Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung.
Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum
Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A
yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, ke delapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D
b. Port B
Tabel 2.1. PIN port B Atmega16A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan
internal pull-up resistor (dapat diatur per bit). Output buffer Port B dapat member arus 20 mA dan dapat mengendalikan display LED secara langsung. Data
Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum Port B
c. Port C
Tabel 2.2. PIN port C ATmega16A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan
internal pull-up resistor (dapat diatur per bit). Output buffer Port C dapat member arus 20 mA dan dapat mengendalikan display LED secara langsung. Data
Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum Port C
digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, dua pin port C (PC6 dan PC7) juga memiliki fungsi alternative sebagai oscillator untuk
timer/counter 2.
d. Port D
Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum Port D
digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi-fungsi alternative khusus seperti yang dapat dilihat dalam table berikut.
e. VCC
Merupakan Pin yang berfungsi sebagai pin masukan catu daya.
f. RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka system akan di-reset.
g. XTAL1
XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke
internal clock operating circuit.
h. XTAL2
XTAL2 adalah output dari inverting oscillator amplifier. i. AVcc
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui low pass filter.
AREF adalah kaki masukan referensi bagi A/D Converter. Untuk operasionalisasi ADC, suatu level tegangan antara AGND dan Avcc harus diberikan ke kaki ini.
k. GND
AGND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki anlalog ground yang terpisah.
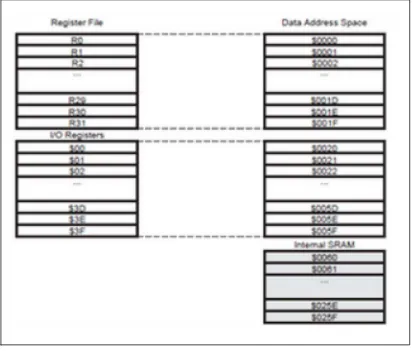
2.1.4 Organisasi Memori
ATMega16A memiliki ruang pengalamatan memori data dan memori program yang terpisah. Sebagai tambahan, Atmega16A memiliki fitur suatu
EEPROM Memori untuk penyimpanan data.
1. Memori Data
Memori data terbagi menjadi 3 bagian, yaitu 32 register umum, 64 buah
register I/O,dan 512 byte SRAM Internal. Register keperluan umum menempati
space data pada alamat terbawah, yaitu $00 sampai $1F. Sementara itu, register
khusus untuk menangani I/O dan control terhadap mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari $20 hingga $5F. Register tersebut merupakan
register yang khusus digunakan untuk mengatur fungsi terhadap berbagai
Gambar 2.3. Peta Memori Data AVR ATmega16A
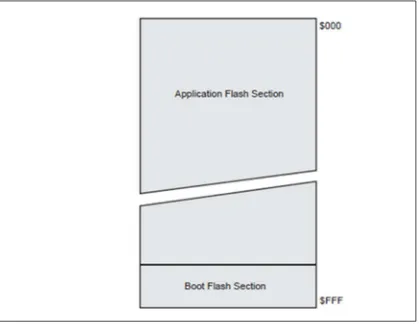
2. Memori Pr ogram
ATmega16A berisi 8K bytes On-Chip di dalam system Memori flash Reprogrammable untuk penyimpanan program. Karena semua AVR instruksi adalah 16 atau 32 bits lebar, Flash adalah berbentuk 4K x16. Untuk keamanan perangkat lunak, Flash Ruang program memori adalah dibagi menjadi dua bagian, bagian boot program dan bagian aplikasi program dengan alamat mulai dari $000
sampai $FFF. Flash Memori mempunyai suatu daya tahan sedikitnya
10,000write/erase Cycles. ATmega8535 Program Counter (PC) adalah 12 bit
Gambar 2.4. Peta Memori Program AVR ATmega16A
Sumber : http://nextsys.web.id/edukasi/tag/belajar-mikrokontroler-atmega16
2.2 Sensor infra red
1. Metode langsung, dimana infra red diberi bias layaknya rangkaian led
biasa.
2. Metode dengan pemberian pulsa, mengacu kepada kurva karakteristik
infra red tersebut.
Metode pemberian pulsa juga masih rentan terhadap gangguan frekuensi luar, maka kita harus menggunakan teknik modulasi, dimana akan ada dua frekuensi yaitu frekuensi untuk data dan frekuensi untuk pembawa. Dengan teknik ini, maka penerima akan membaca data yang sudah dikirimkan tersebut.
Terdapat beberapa komponen yang dapat digunakan untuk penerima, yaitu :
1. Modul penerima jadi, yang dilengkapi dengan filter 38,5 Khz.
2. Phototransistor atau photodioda, kita harus membuat rangkaian tambahan misal dengan metode pembagi tegangan.
Untuk aplikasi lebih lanjut, misalnya untuk mikrokontroler kita membutuhkan keluaran yang diskrit, dimana hanya logika satu atau nol yang di butuhkan. Kondisi ini harus kita lengkapi dengan rangkaian komparator, atau masuk ke transistor sebagai saklar. Kalau kita menggunakan data dengan teknik modulasi maka data yang dikirim harus di filter, berarti kita harus merancang flter yang akan membuang frekuensi tersebut, lalu masuk ke rangkaian buffer atau
transistor sehingga keluarannya berupa sinyal diskrit.
Kurvanya
Gambar 2.5. Kurva gelombang cahaya pada infra red
Sinar infra merah tergolong ke dalam sinar yang tidak tampak. Jika dilihat dengan
spektroskop sinar maka radiasi sinar infra merah tampak pada spektrum
gelombang elektromagnet dengan panjang gelombang diatas panjang gelombang sinar merah.
Komponen yang dibutuhkan:
• IC LM555
• Resistor Variabel/Trimport 10K ohm
• Transistor 2N3904
• PhotoTransistor / Photodioda
Sumber : http://zhiescreamous.wordpress.com/2012/05/14/sensor-infra-red/
2.3 keypad 4x4
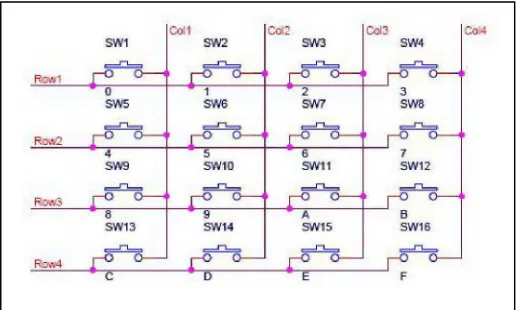
Keypad adalah bagian penting dari suatu perangkat elektronika yang membutuhkan interaksi manusia. Keypad berfungsi sebagai interface antara perangkat (mesin) elektronik dengan manusia atau dikenal dengan istilah HMI (Human Machine Interface). Matrix keypad 4×4 pada artikel ini merupakan salah satu contoh keypad yang dapat digunakan untuk berkomunikasi antara manusia dengan mikrokontroler. Matrix keypad 4×4 memiliki konstruksi atau susunan yang simple dan hemat dalam penggunaan port mikrokontroler. Konfigurasi
keypad dengan susunan bentuk matrix ini bertujuan untuk penghematan port mikrokontroler karena jumlah key (tombol) yang dibutuhkan banyak pada suatu sistem dengan mikrokontroler. Konstruksi matrix keypad 4×4 untuk
mikrokontroler dapat dibuat seperti pada gambar 2.6. Konstruksi Matrix Keypad 4×4 Untuk Mikrokontroler
Konstruksi Matrix Keypad 4x4 Untuk Mikrokontroler,matrix keypad,matrik keypad,matrix keypad 4x4, matrik keypad untuk mikrokontroler, matrix keypad
4x3,matrix keypad 4x4, matrix keypad 4x4 mikrokontroler, matrix keypad microcontroller, membuat matrix keypad, membaca matrix keypad, scanning
matrix keypad,kontruksi matrix keypad, skema matrix keypad, rangkaian matrix
keypad, rangkaian matrix keypad 4x4, skema matrix keypad 4x4, teori matrix
keypad, definisi matrix keypad, pengertian matrix keypad, matrix keypad
adalah,program matrix keypad microkontroller, menggunakan matrix keypad
Konstruksi matrix keypad 4×4 diatas cukup sederhana, yaitu terdiri dari 4 baris dan 4 kolom dengan keypad berupas saklar push buton yang diletakan disetiap persilangan kolom dan barisnya. Rangkaian matrix keypad diatas terdiri dari 16 saklar push button dengan konfigurasi 4 baris dan 4 kolom. 8 line yang terdiri dari 4 baris dan 4 kolom tersebut dihubungkan dengan port mikrokontroler 8 bit. Sisi baris dari matrix keypad ditandai dengan nama Row1, Row2, Row3 dan Row4
kemudian sisi kolom ditandai dengan nama Col1, Col2, Col3 dan Col4. Sisi input atau output dari matrix keypad 4×4 ini tidak mengikat, dapat dikonfigurasikan kolom sebagi input dan baris sebagai output atau sebaliknya tergantung programernya.
2.3.1 Pr oses Scaning Matrix Keypad 4×4 Untuk Mikrokontroler
Proses scaning untuk membaca penekanan tombol pada matrix keypad 4×4 untuk
resistor pull-up) dan dihubungkan ke port mikrokontroler dengan jalur kolom adalah jalur input dan jalur baris adalah jalur output maka proses scaning matrix keypad 4×4 diatas dapat dituliskan sebagai berikut.
• Mengirimkan logika Low untuk kolom 1 (Col1) dan logika HIGH untuk kolom yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111, atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW sehingga data yang terbaca 1011, atau tombol SW9
yang ditekan sehingga data yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan maka data pembacaan baris akan 1111. • Mengirimkan logika Low untuk kolom 2 (Col2) dan logika HIGH untuk kolom yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111, atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW sehingga data yang terbaca 1011, atau tombol SW9
yang ditekan sehingga data yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan maka data pembacaan baris akan 1111. • Mengirimkan logika Low untuk kolom 4 (Col4) dan logika HIGH untuk kolom yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111, atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW sehingga data yang terbaca 1011, atau tombol SW9
yang ditekan sehingga data yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan maka data pembacaan baris akan 1111.
Kemudian data pembacaan baris ini diolah sebagai pembacaan data penekanan tombol keypad. Sehingga tiap tombol pada matrix keypad 4×4 diatas dengan teknik scaning tersebut akan menghasilkan data penekanan tiap-tiap tombol sebagai berikut.
SW1 = 0111 0111 SW9 = 0111 1101
SW2 = 1011 0111 SW10 = 1011 1101 SW3 = 1101 0111 SW11 = 1101 1101
SW4 = 1110 0111 SW12 = 1110 1101 SW5 = 0111 1011 SW13 = 0111 1110 SW6 = 1011 1011 SW14 = 1011 1110
SW8 = 1110 1011 SW16 = 1110 1110
Data port mikrokontroler, misalkan pada SW2 = 1011 0111 tersebut terbagi dalam
nible atas dan nible bawah dimana data nible atas (1011) merupakan data yang kita kirimkan sedangkan data nible bawah (0111) adalah data hasil pembacaan penekanan tombol keypad SW2 pada proses scaning matrix keypad 4×4 diatas.
Sumber : http://elektronika-dasar.web.id/artikel-elektronika/matrix-keypad-4x4-untuk-mikrokontroler/
2.4 power supply
Power supply adalah rangkaian elektronika yang berfungsi untuk memasok daya ke komponen lain pada perangkat elektronika yang mengubah arus listrik bolak-balik menjadi arus listrik searah. Pada rangkaian power supply terdapat IC regulator sebagai penstabil tegangan output. Misalnya 7805 adalah regulator
Gambar 2.7. Rangkaian Power Supply
Sumber : Sumber : http://blogelektronikadi.blogspot.com/2012/06/rangkaian-rangkaian-power-supply.html
2.5 Motor DC
Gambar 2.8. motor DC
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur:
a. Tegangan dinamo – meningkatkan tegangan dinamo akan meningkatkan kecepatan
b. Arus medan – menurunkan arus medan akan meningkatkan kecepatan.
Motor DC tersedia dalam banyak ukuran, namun penggunaannya pada umumnya dibatasi untuk beberapa penggunaan berkecepatan rendah, penggunaan daya rendah hingga sedang seperti peralatan mesin dan rolling mills, sebab sering terjadi masalah dengan perubahan arah arus listrik mekanis pada ukuran yang lebih besar. Juga, motor tersebut dibatasi hanya untuk penggunaan di area yang bersih dan tidak berbahaya sebab resiko percikan api pada sikatnya. Motor DC
juga relatif mahal dibanding motor AC.
Hubungan antara kecepatan, flux medan dan tegangan dinamo ditunjukkan dalam persamaan berikut:
Gaya elektromagnetik: E = KΦ N
Dimana:
E =gaya elektromagnetik yang dikembangkan pada terminal dinamo (volt)
Φ = flux medan yang berbanding lurus dengan arus medan
N = kecepatan dalam RPM (putaran per menit)
T = torque electromagnetik
Ia = arus dinamo
K = konstanta persamaan
2.5.1 Mekanisme Kerja Motor DC
Mekanisme kerja untuk seluruh jenis motor secara umum sama
1. Arus listrik dalam medan magnet akan memberikan gaya
a. Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran/loop,
maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
b. Pasangan gaya menghasilkan tenaga putar/ torque untuk memutar kumparan.
Dalam memahami sebuah motor, penting untuk mengerti apa yang dimaksud dengan beban motor. Beban mengacu kepada keluaran tenaga putar/
torque sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikategorikan kedalam tiga kelompok :
2. Beban torque konstan adalah beban dimana permintaan keluaran energinya bervariasi dengan kecepatan operasinya namun torque nya tidak bervariasi. Contoh beban dengan torque konstan adalah conveyors, rotary kilns, dan pompa displacement konstan.
3. Beban dengan variabel torque adalah beban dengan torque yang bervariasi dengan kecepatan operasi. Contoh beban dengan variabel torque adalah pompa sentrifugal dan fan (torque bervariasi sebagai kwadrat kecepatan). 4. Beban dengan energi konstan adalah beban dengan permintaan torque yang
berubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
2.5.2 Komponen Utama Motor DC
Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/direct-unidirectional. Motor DC digunakan pada penggunaan khusus dimana diperlukan penyalaan torque yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas.
a. Kutub medan. Secara sederhada digambarkan bahwa interaksi dua kutub magnet akan menyebabkan perputaran pada motor DC. Motor DC memiliki kutub medan yang stasioner dan dinamo yang menggerakan bearing pada ruang diantara kutub medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi bukaan diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau lebih elektromagnet. Elektromagnet menerima listrik dari sumber daya dari luar sebagai penyedia struktur medan.
b. Dinamo. Bila arus masuk menuju dinamo, maka arus ini akan menjadi elektromagnet. Dinamo yang berbentuk silinder, dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi. Jika hal ini terjadi, arusnya berbalik untuk merubah kutub-kutub utara dan selatan dinamo.
c. Commutator. Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk membalikan arah arus listrik dalam dinamo.
Commutator juga membantu dalam transmisi arus antara dinamo dan sumber daya.
2.5.3 J enis Motor DC
a) Motor DC Sumber Daya Terpisah/ Separately Excited
b) Motor DC Sumber Daya Sendiri/ Self Excited: motor shunt
Pada motor shunt, gulungan medan (medan shunt) disambungkan secara paralel dengan gulungan dinamo. Oleh karena itu total arus dalam jalur merupakan penjumlahan arus medan dan arus dinamo.
Berikut tentang kecepatan motor shunt :
1. Kecepatan pada prakteknya konstan tidak tergantung pada beban (hingga
torque tertentu setelah kecepatannya berkurang, lihat Gambar 4) dan oleh karena itu cocok untuk penggunaan komersial dengan beban awal yang rendah, seperti peralatan mesin.
2. Kecepatan dapat dikendalikan dengan cara memasang tahanan dalam susunan seri dengan dinamo (kecepatan berkurang) atau dengan memasang tahanan pada arus medan (kecepatan bertambah).
c) Motor DC daya sendiri: motor seri
Dalam motor seri, gulungan medan (medan shunt) dihubungkan secara seri dengan gulungan dinamo (A) seperti ditunjukkan dalam gambar 5. Oleh karena itu, arus medan sama dengan arus dinamo. Berikut tentang kecepatan motor seri
(Rodwell International Corporation, 1997; L.M. Photonics Ltd, 2002):
2. Harus dihindarkan menjalankan motor seri tanpa ada beban sebab motor akan mempercepat tanpa terkendali.
Motor-motor seri cocok untuk penggunaan yang memerlukan torque penyalaan awal yang tinggi, seperti derek dan alat pengangkat hoist.
d) Motor DC Kompon/Gabungan
Motor Kompon DC merupakan gabungan motor seri dan shunt. Pada motor kompon, gulungan medan (medan shunt) dihubungkan secara paralel dan seri dengan gulungan dynamo (A) seperti yang ditunjukkan dalam gambar 6. Sehingga, motor kompon memiliki torque penyalaan awal yang bagus dan kecepatan yang stabil. Makin tinggi persentase penggabungan (yakni persentase gulungan medan yang dihubungkan secara seri), makin tinggi pula torque
penyalaan awal yang dapat ditangani oleh motor ini. Contoh, penggabungan 40-50% menjadikan motor ini cocok untuk alat pengangkat hoist dan derek, sedangkan motor kompon yang standar (12%) tidak cocok (myElectrical, 2005).
Sumber : http://rohimston.blogspot.com/2010/07/motor-dc.html
2.6 LCD Display 16x2 Character
M1632 terdiri dari bagian penampil karakter (LCD) yang berfungsi menampilkan karakter dan bagian sistem prosesor LCD dalam bentuk modul dengan
mikrokontroler yang diletakan dibagian belakan LCD tersebut yang berfungsi untuk mengatur tampilan LCD serta mengatur komunikasi antara LCD dengan mikrokontroler yang menggunakan modul LCD tersebut. Modul prosesor M1632
pada LCD tersebut memiliki memori tersendiri sebagai berikut. • CGROM (Character Generator Read Only Memory)
• CGRAM (Character Generator Random Access Memory)
• DDRAM (Display Data Random Access Memory)
Fisik LCD (Liquid Cristal Display) Dot Matrix 2×16 M1632
Gambar 2.9. Gambar LCD 16x2
Fungsi Pin LCD (Liquid Cristal Display) Dot Matrix 2×16 M1632
a. DB0 – DB7 adalah jalur data (data bus) yang berfungsi sebagai jalur komunikasi untuk mengirimkan dan menerima data atau instruksi dari
b. RS adalah pin yang berfungsi sebagai selektor register (register sellect) yaitu dengan memberikan logika low (0) sebagai register perintah dan logika high (1) sebagai register data.
c. R/W adalah pin yang berfungsi untuk menentukan mode baca atau tulis dari data yang terdapat pada DB0 – DB7. Yaitu dengan memberikan logika low (0) untuk fungsi read dan logika high (1) untuk mode write.
d. Enable (E), berfungsi sebagai Enable Clock LCD, logika 1 setiap kali pengiriman atau pembacaan data.
2.6.1 Penulisan Data Register Perintah LCD (Liquid Cristal Display) M1632
Penulisan data ke Register Perintah dilakukan dengan tujuan mengatur tampilan
LCD, inisialisasi dan mengatur Address Counter maupun Address Data. Kondisi
proses pembacaan data. 4 bit nibble tinggi dibaca dengan diawali pulsa logika 1 pada E Clock dan kemudian 4 bit nibble rendah dibaca dengan diawali pulsa logika 1 pada E Clock. Untuk Mode 8 bit interface, pembacaan 8 bit (nibble tinggi dan rendah) dilakukan sekaligus dengan diawali sebuah pulsa logika 1 pada E Clock.
2.6.3 Penulisan Data Register Data LCD (Liquid Cristal Display) M1632
Penulisan data pada Register Data dilakukan untuk mengirimkan data yang akan ditampilkan pada LCD. Proses diawali dengan adanya logika 1 pada RS yang menunjukkan akses ke Register Data, kondisi R/W diatur pada logika 0 yang menunjukkan proses penulisan data. Data 4 bit nibble tinggi (bit 7 hingga bit 4) dikirim dengan diawali pulsa logika 1 pada sinyal E Clock dan kemudian diikuti 4 bit nibble rendah (bit 3 hingga bit 0) yang juga diawali pulsa logika 1 pada sinyal
E Clock.
2.7 CodeVision
CodeVisionAVRmenyediakan sebuah editor yang di desain untuk menghasilkan program C secara otomatis untuk mikrokontroler AVR. Program C yang akan diimplementasikan menggunakan standar ANSI C yang sesuai dengan arsitektur mikrokontroler.
CodeVisionAVR adalah sebuah compiler C yang telah dilengkapi dengan fasilitas integrated development environment (IDE) dan didesain agar dapat menghasilkan kode program secara otomatis untuk mikrokontroler Atmel AVR. Program ini dapat berjalan dengan menggunakan system operasi windows 2000, xp, vista dan windows 7. Integrated Development Environment (IDE) telah dilengkapi dengan fasilitas pemrograman chip melalui metode In-System Progamming, sehingga dapat secara otomatis mentransfer file ke dalam chip mikrokontrolerAVR setelah sukses dikompilasi.
Software In-System Programmer didesain untuk bekerja ketika dihubungkan dengan development board STK500, STK600, AVRISP, AVRISP mkII, AVR Dragon, AVRProg(AVR910 (Application Note), Atmel JTAGICE mkII, kanda system SKT200+SKT300, dontronics DT006, vogel elektronik VTEC-SIP, futurlec JRAVR and microtronics ATCPU, dan mega 2000. CodeVIsionAVR dapat menghasilkan kode program secara otomatis melalui fasilitas CodeWizardAVR Automatic Program Generator.Dengan adanya fasilitas ini maka penulisan program dapat dilakukan dengan cepat dan lebih efisien. Seluruh kode dapat diimplementasikan dengan fungsi sebagai berikut:
2. Mengatur akses memori eksternal, 3. Inisialisasi port input/output.
4. Inisialisasi interupsi eksternal.
5. Inisialisasi timer/counter dan watchdog timer.
6. Inisialisasi USART dan interupsi buffer untuk komunikasi serial. 7. Inisialisasi komparator analoG dan ADC.
8. Inisialisasi interfaceSPI dan two wire interface(TWI).
9. Inisialisasi interfaceCAN.
10. Inisialisasi I²C Bus, sensor suhu LM75, teherometer/thermostat DS1621 dan real time clockPCF8563, PCF8583, DS1302, DS1307.
11. Inisialisasi 1 wire bus dan sensor suhu DS1820/DS18S20. 12. Inisialisasi modul LCD.
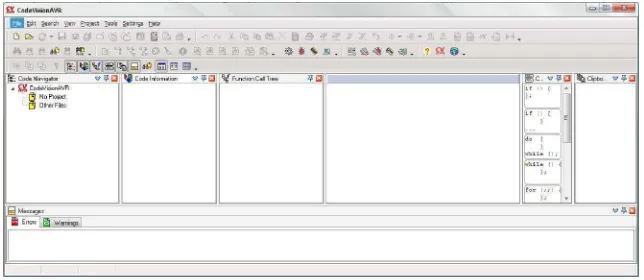
2.7.1 Bagian-bagian CodeVisionAVR C Compiler
Ketika program CodeVisionAVR C Compiler dijalankan dengan klik ganda ikon CodeVisionAVR C Compiler, maka berikut akan tampil bentuk .exe
tampilannya pada gambar 2.10.
Untuk memulai bekerja dengan CodeVisionAVR pilih pada menu File -> New. Maka akan muncul kotak dialog seperti gambar 2.11.
Gambar 2.11. Tampilan Project Baru
Pilih Project kemudian tekan OK, maka akan muncul kotak dialog seperti pada gambar 2.12.
Gambar 2.12. Tampilan Code Wizard AVR
Pilih Yes untuk menggunakan CodeWizardAVR. CodeWizardAVR
Gambar 2.13. Jenis Mikrokontroler Yang Dipakai
2.7.2 Pemilihan Chip dan Frekwensi Xtall
Langkah pertama dalam menggunakan cvAVR adalah membentuk sebuah project baru, dengan click create new project maka akan muncul pertanyaan apakah anda ingin memanfaatkan bantuan code wizard, pilih saja ok maka anda akan masuk pada code wizard. Langkah pertama yang harus dilakukan pada code wizard adalah memilih jenis chip mikrokontroller yang digunakan dalam project dan frekwensi xtall yang digunakan. Pemilihan chip dan frekuensi xtall dapat dilihat seperti pada gambar 2.14 berikut.
2.7.3 Inisialisasi LCD Port I/O
Inisialisasi LCD Port berfungsi untuk memilih fungsi port sebagai input atau sebagai output. Pada konfigurasi port sebagai output dapat dipilih pada saat awal setelah reset kondisi port berlogika 1 atau 0, sedangkan pada konfigurasi
port sebagi input terdapat dua pilihan yaitu kondisi pin input toggle state atau
pull-up, maka sebaiknya dipilih pull up untuk memberi default pada input selalu berlogika 1. setiap port berjumlah 8 bit, konfigurasi dari port dapat diatur sesuai dengan kebutuhan. Pengaturan konfigurasi dapat dilakukan perbit, jadi dalam satu
port dapat difungsikan sebagi input dan output dengan nilai default nya berbeda-beda. Gambar 2.15. menunjukkan seting konfigurasi pada port a dengan kombinasi input dan output yang berbeda-beda defaultnya.
Gambar 2.15. Inisialisasi LCD Port I/O
selanjutnya pada menu File, pilih Generate, Save and Exit dan simpan pada direktori yang diinginkan.
(Sumber: http://www.musbikhin.com/codevision-avr-c-compiler).
2.8USBasp Downloader
merupakan in-system programmer yang dapat dihubungkan ke komputer melalui port USB untuk memprogram mikrokontroler keluarga AVR® 8 bit RISC
dan MCS-51® yang memiliki fitur ISP. Produk ini dapat bekerja dengan perangkat lunak yang mendukung protokol ATMEL AVRISP MKII seperti AVR Studio©, CodeVisionAVR©, AVRDUDE (WinAVR) dan BASCOM-AVR© untuk memprogram mikrokontroler AVR. USBasp Downloader juga dilengkapi dengan perangkat lunak berbasis Windows® yang menyediakan antarmuka yang sederhana dan mudah untuk memprogram mikrokontroler keluarga MCS-51 seri
AT89.
Dimensi pada USBasp Downloader panjang 6,6 cm, lebar 4,1 cm, tinggi 1,5 cm, dan panjang kabel ISP ±10 cm.
Spesifikasi :
1. Dapat digunakan untuk semua tipe AVR® 8 bit RISC dan mikrokontroler MCS-51® seri AT89 yang memiliki fitur ISP.
2. IC yang didukung : 1. Keluarga AVR
2. Keluarga MCS-51
AT89LP2052, AT89S2051, AT89S51, AT89S53, AT89S8252, AT89S8253, AT89LP4052, AT89S4051, AT89S52, AT89LS53, AT89LS8252
3. Antarmuka USB ke komputer.
4. Beroperasi pada tegangan target 2,7V sampai 5,5V.
5. Mengambil suplai daya dari target board dengan kebutuhan arus maksimum 50 mA @ 5,5 V, sehingga aman bagi komputer jika terjadi hubungan singkat pada target board.
6. Menggunakan protokol ATMEL AVRISP MKII untuk mikrokontroler AVR® 8 bit RISC.
7. Mendukung Flash, EEPROM, Lock Bit, Fuse Bit Programming, dan mendukung file format Intel HEX atau BIN serta dilengkapi perangkat lunak berbasis Windows® untuk keluarga mikrokontroller MCS-51 seri
AT89.
8. Tersedia 2 pilihan konektor ISP (5x2) standar ATMEL untuk target board
dengan mikrokontroler keluarga AVR dan MCS-51.
9. Tersedia USB driver yang kompatibel dengan Windows® XP/Vista/Win7. 10. Enclosure berbahan logam.
11. Dilengkapi indikator untuk power dan status dengan warna yang berbeda. 12. Dilengkapi soket konverter USBasp 10 to 6 Converter untuk
menghubungkan AVR in-system programmer berkonektor 10 pin ke target board berkonektor ISP 6 pin.
Pada gambar 2.16 adalah bentuk fisik dari USB downloader
METODE DAN PERANCANGAN SYSTEM
Pada bab ini merupakan bagian perancangan dan bagian pembuatan perangkat lunak (software) dan perangkat keras (hardware), yang dibahas tentang langkah-langkah perencanaan dan pembuatan Tugas Akhir, yang merupakan pokok bahasan utama dalam pembuatan tugas akhir ini.
3.1 Metode dan Perancangan
Dalam pembuatan Alat Pengayak Tepung Terigu Otomatis Berbasis
Mikrokontroler ini perlu diperhatikan beberapa aspek yang dibutuhkan, yaitu:
3.1.1 Kebutuhan Hardwar e
Dalam pembuatan alat Pengayak Tepung Otomatis Berbasis
Mikrokontroler dibutuhkan suatu kebutuhan. Kebutuhan ini menyangkut kebutuhan hardware dan kebutuhan software untuk mendukungnya. Dan kebutuhan tersebut sangat mempengaruhi dalam pembuatan alat pengayak tepung. Adapun hardware yang digunakan dalam perancangan alat pengayak tepung otomatis yaitu mikrokontroler tipe ATmega16A, Sensor infra red, keypad
4x4, motor DC, driver motor DC, LCD, power supply . Kebutuhan ini nantinya akan berpengaruh dalam sistemnya. Dan kebutuhan perangkat keras tersebut mudah di temui di pasaran.
3.1.2 Miniatur
Dalam alat ini yang digunakan sebagai miniatur adalah sebuah alat pengayak yang di rancang secara mekanik agar alat ini bsa mengayak sesuai kemauan dan bisa di kondisikan dengan posisi motor.di alat tersebut terdapat wadah penampung masuknya tepung terigu yang berbentuk mengerucut agar tepung bisa terdeteksi oleh sensor yang di pasang di ujung bawah wadah tersebut,saya menggunakan corongan minyak yang saya modifikasi agar sesuai kebutuhan dan bisa di pasang sensor infra red di ujung corong seperti pada gambar 3.1 berikut.
Gambar 3.1 miniatur pengayak
lengan mekaniknya menempel pada bagian pengayak dari alat yang di buat seperti gambar 3.2
Gambar 3.2 system mekanik pengayak
Sedangkan untuk peletakan sensor yang di letakkan pada ujung corong bertujuan agar masuknya tepung pada corong dapat terdeteksi oleh sensor dan sensor dapat menginterupsikan pada mikrokontroler dan proses pengayakan yang sudah di setting dapat berjalan sesuai yang di inginkan, jadi sensor di letakkan di bagian paling bawah ujung corong seperti pada gambar 3.3
Gambar 3.3 desain peletakan sensor
3.1.3 Pr oses pengayakan tepung terigu
Dalam hal pengayakan tepung terigu perlu diperhatikan aspek-aspek yang dibutuhkan, yaitu:
1) Sistem ini dirancang untuk mengayak tepung terigu dan proses bekerja otomatis disaat masuknya tepung terigu terdeteksi oleh sensor infra red
2) Sistem ini dirancang untuk bisa melakukan pengayakan secara otomatis
3) Sistem ini dirancang untuk bisa mengatur kecepatan motor DC dan waktu tenggang pada proses pengayakan.
4) Sistem ini bisa dikatakan bekerja bila tepung yang masuk ke wadah telah terdeteksi oleh sensor infra red kemudian masuk pada ATMega 16A dan ditampilkan pada layar LCD kemudian pengaturan motor dan timer di lakukan
3.2 Deskr ipsi Sistem
pembuatan perangkat keras elektronik terdiri dari pembuatan rangkaian sistem
mikrokontroler.
Pada umumnya didalam dunia kuliner alat pengayak tepung sudah tersedia di pasaran akan tetapi alat tersebut masih manual,tapi disini untuk melakukan pengayakan saya buat atau di rancang secara otomatis dengan memanfaatkan masuknya tepung yang kemudian terdeteksi oleh sensor infra red kemudian di proses untuk bekerjanya motor DC yang sebelumnya sudah di atur kecepatan dan
timer kerja motornya..
3.3 Perancangan Sistem
Sub bab ini menjelaskan mengenai proses desain perangkat lunak yang akan dibuat dan hardware yang digunakan. Proses desain sistem dalam sub bab ini akan dibagi menjadi beberapa tahap yaitu: alur umum sistem, spesifikasi kebutuhan sistem, alur umum, flowchart, dan perancangan hardware.
Aplikasi ini merupakan sistem yang bisa mempermudah semua orang dikalangan umum untuk dapat mengayak tepung terigu secara otomatis, disini kita bisa mengatur kecepatan motor dan timer pengayakan sesuai keinginan kita sehingga proses pengayakan bisa lebih aplikatif dan mengikuti jaman teknologi sekarang ini dengan menggunakan alat yang berbasis mikrokontroler.
Mekanisme dan Sistem Alat pengayak Tepung Otomatis:
2. Setelah selesai memasang sensor infra red untuk mendeteksi masuknya tepung terigu tersebut dan mengeset nilai kecepatan motor dan timer
waktu yang di tentukan lalu kemudian alat sudah bisa digunakan.
3.3.1 Alur Umum Sistem
Pada rancangan umum dari aplikasi ini adalah memudahkan pengayakan tepung terigu yang bisa lebih aplikatif. Pembuatan alat pengayak tepung ini dengan pengoperasian berbasis mikrokontroler ATMega 16A terdiri dari 2 bagian yaitu: pembuatan perangkat keras (hardware) dan perangkat lunak (software). Gambar umum tugas akhir ini dapat dilihat dari Gambar 3.4
Gambar 3.4 Diagram Sistem Alur Alat pengayak tepung
penanganan dini yaitu keypad, dan LCD 2x16. Sistem kerja dari minimum adalah memonitoring pendeteksian dari system kerja motor DC yang kemudian masuk dalam mikrokontroler yang kemudian ditampilkan yaitu melalui LCD. Output mikrokontroler akan bekerja sebagaimana fungsinya jika mendapatkan hasil proses pengayakan yang kecepatan dan timer yang sesuai ketentuan. Yaitu, apabila system mendapatkan masukkan dari sensor Infra red kemudian proses pengesetan motor dan timer dengan menggunakan keypad dan hasil tersebut akan ditampilkan pada LCD, apabila semua pengesetan sudah dilakukan maka proses pengayakan akan berjalan sesuai dengan kecepatan dan tenggang waktu yang di setting sebelumnya.
3.3.2 Rangkaian Sistem Minimum Atmega 16A
Dalam perancangan rangkaian Atmega 16A memerlukan 2 tahap yaitu perancangan sistem minimum Atmega 16A dan ada perancangan downloader. Dalam hal ini downloader dan sistem minimum dibuat secara terpisah. Hal ini bertujuan untuk menghindari kerusakan apabila salah satunya tidak bekerja.
Minimum sistem ini merupakan kontrol dari keseluruhan sistem kerja pada alat ini. Pada proyek ini digunakan sistem minimum yang berbasis pada
mikrokontroler Atmega 16A, digunakannya Atmega 16A karena bahasa pemrograman C tersebut adalah programan CodeVisionAVR C Compiler berbasis
AVR. Program ini dapat berjalan dengan menggunakan system operasi windows
2000, xp, vista dan windows 7. Integrated Development Environment (IDE) telah dilengkapi dengan fasilitas pemrograman chip melalui metode In-System Progamming, sehingga dapat secara otomatis mentransfer file kedalam chip mikrokontroler AVR setelah sukses dikompilasi.
Software In-System Programmer didesain untuk bekerja ketika dihubungkan dengan development board STK500, STK600, AVRISP, AVRISP mkII, AVR Dragon, AVRProg(AVR910 (Application Note), Atmel JTAGICE mkII, kanda system SKT200+SKT300, dontronics DT006, vogelelektronikVTEC-SIP,
futurlec JRAVR and microtronics ATCPU, dan mega 2000. CodeVIsionAVR
dapat menghasilkan kode program secara otomatis melalui fasilitas CodeWizard AVR Automatic Program Generator.
Mikrokontroler ini memiliki 2 fungsi utama yaitu untuk mengkonversi data analog berupa tegangan dan mengolahnya melalui program sehingga data digital berubah biner yang menghasilkan oleh A/D converter didalam
mikrokontroler di tampilkan pada LCD. Penggunaan masing-masing port I/O mikrokontroler Atmega 16A dalam sistem ini adalah sebagai berikut.
1. Port A. < input sensor infra red
2. Port B < input keypad
3. Port C > output LCD
3.3.3 Rangkaian Sensor Infra red
Sensor Infra red adalah suatu jenis sensor optik yang menawarkan biaya rendah, daya tahan yang lama, sensitifitas yang bagus terhadap benda yang disensor dengan menggunakan rangkaian elektronik yang sederhana. Sensor ini terutama sesuai untuk aplikasi dalam mendeteksi masuknya tepung terigu, Kurva karakteristik infra red membandingkan antara frekuensi dengan jarak yang dicapainya. kalau frekuensi di bawah puncak kurva atau lebih dari puncak kurva, maka jarak yang dapat dicapai akan pendek. Ada dua metode utama dalam perancangan pemancar sensor infra red, yaitu :
1. Metode langsung, dimana infra red diberi bias layaknya rangkaian led
biasa.
2. Metode dengan pemberian pulsa, mengacu kepada kurva karakteristik
infra red tersebut.
Metode pemberian pulsa juga masih rentan terhadap gangguan frekuensi luar, maka kita harus menggunakan teknik modulasi, dimana akan ada dua frekuensi yaitu frekuensi untuk data dan frekuensi untuk pembawa. Dengan teknik ini, maka penerima akan membaca data yang sudah dikirimkan tersebut.
Dan pada alat yang saya kerjakan mengguanakan system modulasi photo diode
berjalan, sedangkan apabila cahaya sensor tidak terhambat oleh masuknya tepung maka alat tidak akan bekerja.berikut adalah rangkaian infrared seperti pada gambar 3.5.
Gambar 3.5 Infra red
3.3.4 Rangkaian Motor DC
Motor Dc merupakan jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminal tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka arah putaran motor akan terbalik pula. Polaritas dari tegangan yang diberikan pada dua terminal menentukan arah putaran motor sedangkan besar dari beda tegangan pada kedua terminal menentukan kecepatan motor.
1. Bagian yang tetap/stasioner yang disebut stator. Stator ini menghasilkan
medan magnet, baik yang dibangkitkan dari sebuah koil (elektro magnet) ataupun magnet permanen.
2. Bagian yang berputar disebut rotor. Rotor ini berupa sebuah koil dimana arus
listrik mengalir.
Dalam studi kasus ini saya memanfaatkan motor DC sebagai media penggerak untuk system mekanik alat pengayak yang kami buat, dengan memanipulasi tingkat kecepatan motor agar bisa di atur oleh pengguna dengan menggunakan atau mengisikan beberapa program pada mikrokontroler yang nantinya di interupsikan pada driver motor DC.
3.4 Cara Merancang Alat
Merancang Alat pengayak tepung terigu Berbasis Mikrokontroler
bukanlah suatu hal yang mudah dan tidak dapat dilakukan oleh banyak kalangan. Dalam menjalankan Tugas Akhir ini penulis ingin memaparkan bagaimana cara merancang alat atau mesin ini.
Pertama membeli semua komponen-komponen yang diperlukan dalam pembuatan Alat Pengayak Tepung Terigu Berbasis Mikrokontroler ini.
Komponen atau alat yang di perlukan yaitu Atmega16, keypad, motor DC
masuknya tepung terigu dan wadah tersebut bisa di pasang pada miniatur pengayak.
Ketiga menggunakan USB downloader untuk menghubungkan mikrokontroler ke komputer. Keempat menguji coba hasil keseluruhan rangkaian Alat Pengayak Tepung Terigu dengan menginputkan tingkat kecepatan dan timer
yang telah ditentukan.
3.4.1 Analisa Per ancangan Perangkat Keras
Dalam pembuatan alat Pengayak Tepung Terigu komponen-komponen yang dibutuhkan adalah sebagai berikut:
1) Sensor Infra red
Sensor Infra red adalah suatu jenis sensor optik yang menawarkan biaya rendah, daya tahan yang lama, sensitifitas yang bagus terhadap benda yang disensor dengan menggunakan rangkaian elektronik yang sederhana. Sensor ini terutama sesuai untuk aplikasi dalam mendeteksi masuknya tepung terigu, Kurva karakteristik infra red membandingkan antara frekuensi dengan jarak yang dicapainya. kalau frekuensi di bawah puncak kurva atau lebih dari puncak kurva, maka jarak yang dapat dicapai akan pendek. Ada dua metode utama dalam perancangan pemancar sensor infra red, yaitu :
3. Metode langsung, dimana infra red diberi bias layaknya rangkaian led
biasa.
4. Metode dengan pemberian pulsa, mengacu kepada kurva karakteristik
Metode pemberian pulsa juga masih rentan terhadap gangguan frekuensi luar, maka kita harus menggunakan teknik modulasi, dimana akan ada dua frekuensi yaitu frekuensi untuk data dan frekuensi untuk pembawa. Dengan teknik ini, maka penerima akan membaca data yang sudah dikirimkan tersebut.
Dan pada alat yang saya kerjakan mengguanakan system modulasi photo diode
agar frekuensi yang di terima lebih stabil tanpa ada gangguan frekuensi luar,dalam studi kasus ini kita memanfaatkan atau memanipulasi laju cahaya sensor sebagai pemicu atau inputan untuk mikrokontroler dimana apabila cahaya sensor ke photo diode terhenti atau terhambat oleh masuknya tepung terigu maka peristiwa itu di gunakan untuk inputan ke mikrokontroler yang kemudian proses yang lain berjalan, sedangkan apabila cahaya sensor tidak terhambat oleh masuknya tepung maka alat tidak akan bekerja.
2) Mikrokontroler Atmega16
Mikrokontroler adalah mikroprosesor yang dirancang khusus untuk aplikasi kontrol, dan dilengkapi dengan ROM, RAM dan fasilitas I/O pada satu
chip. ATMega16A adalah salah satu anggota dari keluarga ATMega. ATMega16A
dirancang oleh Atmel sesuai dengan instruksi standar dan susunan pin 80C5.
3) LCD 2x16
sehingga cahaya tidak dapat melalui setiap Kristal, karenanya seperti pengaturan cahaya menentukan apakah cahaya dapat melewati atau tidak. Sehingga dapat mengubah bentuk Kristal cairannya membentuk tampilan angka atau huruf pada layar. Kegunaan lcd banyak sekali dalam perancangan suatu sistem dengan menggunakan mikrokontroler.Lcd dapat berfungsi untuk menampilkan sutu nilai hasil atau menampilkan menu pada aplikasi mikrokontroler. Pada alat ini ukuran tipe lcd yang digunakan adalah lcd 4x16. Ketika sensor Infra red mendeteksi masuknya tepung , kemudian di imterupsikan kedalam ADC lalu diproses oleh
mikrokontroler dan kemudian baru output untuk menyetting kecepatan motor DC
dan timer bisa di setting dan hasilnya ditampilkan oleh lcd yang berukuran 2x16 tersebut
4) KEYPAD
Keypad ini di gunakan untuk proses peng inputan data atau nilai angka yang akan kita tentukan dalam menentukan kecepatan motor dan memilih tenggang waktu motor yang berputar saat proses pengayakan.
5) Motor DC