Pertumbuhan produksi budidaya ikan air tawar merupakan usaha yang menjanjikan keuntungan yang cukup besar. Hal ini menujukkan ada gairah besar di masyarakat untuk mengembangkan usaha budidaya ikan air tawar. Tentunya pertumbuhan produksi ini mengacu pada permintaan pasar yang terus meningkat. Untuk membudidayakan ikan air tawar, kualitas air menjadi faktor yang paling mendukung dalam perkembangan ikan. Oleh karena itu, penulis
bermaksud untuk membuat sistem yang dapat menerima data secara wireless dan memprosesnya menjadi data yang dikehendaki.
Sistem ini menggunakan Atmega 8535 untuk komunikasi dengan RFM12-433S dengan komunikasi SPI. Sistem akan menerima data secara wireless dari setiap sensor kemudian data tersebut akan ditampilkan menggunakan Visual Basic untuk User Interface. Data tersebut akan ditampilkan dalam sebuah tabel dan grafik untuk setiap masing-masing sensor.
Sistem Telemetri Kualitas Kolam Air Ikan dengan RFM12-433S sebagai Central Unit sudah berhasil dibuat dengan menggunakan 3 pilihan frekuensi dan 3 pilihan kecepatan transfer data. Frekuensi yang digunakan adalah 432MHz, 435MHz dan 437MHz, sedangkan kecepatan transfer data yang digunakan 1kbps, 2kbps dan 5kbps. Sistem ini sudah diuji dengan jarak maksimum pengujian pada jarak 15 meter untuk pengiriman paket data.
ABSTRACT
The production growth cultivation of fish freshwater is a business that promised a sizeable profit. This suggests is of great passion in the community to develop the business of cultivating freshwater fish. Of course the production growth is based on with the market demand that is increasing. To cultivate freshwater fish, the quality of water into factors the most support in the development of fish. Hence, writer mean to keep system that could receive data and a wireless data processing be desired.
This system uses ATMEGA8535 for communication with RFM12-433S by communication of SPI. System will receive data is a wireless of any sensors then the data will display use visual basic to a user interface. The data to display in a table and charts for each sensors.
System telemetry the quality of a pool of water fish with rfm12-433s as central unit have successfully created by using 3 choice the frequency and 3 choice speed data transfers. Frequencies used is 432Mhz, 435Mhz and 437Mhz, while speed transfer the data used 1Kbps, 2Kbps and 5Kbps. System has been tested with maximum distance testing at a distance 15 meters of package delivery data.
SISTEM TELEMETRI KUALITAS AIR KOLAM
IKAN DENGAN RFM12-433S SEBAGAI CENTRAL
UNIT
Diajukan untuk memenuhi salah satu syarat
Memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Jurusan Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
disusun oleh:
CHRISTIN KARURU
NIM : 115114039
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
THE QUALITY OF WATER FISH POOL
TELEMETRY SYSTEM WITH RFM12-433S AS
CENTRAL UNIT
In partial fulfillment of requirements
For the degree of Sarjana Teknik
In Electrical Engineering Study Program
By:
CHRISTIN KARURU
NIM : 115114039
ELECTRICAL ENGINERING STUDY PROGRAM
ELECTRICAL ENGINERING DEPARTMENT
FACULTY OF SCIENCE AND TECHNOLOGI FACULTY
SANATA DHARMA UNIVERSITY
iii
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akhir ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar pustaka sebagaimana layaknya karya ilmiah.
Yogyakarta, 01 Desember 2015
v
Saya menyatakan dengan sesungguhnya bahwa tugas akhir ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar pustaka sebagaimana layaknya karya ilmiah.
Yogyakarta, 01 Desember 2015
vi
LEMBAR PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK
KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma:
Nama : Christin Karuru
Nomor Mahasiswa : 115114039
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul:
SISTEM TELEMETRI KUALITAS KOLAM AIR
IKAN DENGAN RFM12-433S SEBAGAI CENTRAL
UNIT
Beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam
bentuk media lain, mengolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan mempublikasikannya di Internet atau media lain untuk kepentingan akademis
tanpa perlu meminta ijin dari saya maupun memberikan royalty kepada saya selama tetap mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini saya buat dengan sebenarnya.
Yogyakarta, 01 Desember 2015
vii MOTTO :
GOD SAYS,
“STOP WORRYING AND
JUST TRUST
ME.”
Persembahan
Karya ini ku persembahkan kepada…
Tuhan Yesus Kristus Pembimbingku yang setia.
Bapak dan Mamaku tercinta, dan kedua Adikku tersayang.
Andre, kekasihku dengan setia membantu dan memotivasi
Keluarga XVI oi..oi.. yang selalu mengasihiku dan mendukungku
viii
INTISARI
Pertumbuhan produksi budidaya ikan air tawar merupakan usaha yang menjanjikan keuntungan yang cukup besar. Hal ini menujukkan ada gairah besar di masyarakat untuk mengembangkan usaha budidaya ikan air tawar. Tentunya pertumbuhan produksi ini mengacu pada permintaan pasar yang terus meningkat. Untuk membudidayakan ikan air tawar, kualitas air menjadi faktor yang paling mendukung dalam perkembangan ikan. Oleh karena itu, penulis bermaksud untuk membuat sistem yang dapat menerima data secara wireless dan memprosesnya menjadi data yang dikehendaki.
Sistem ini menggunakan Atmega 8535 untuk komunikasi dengan RFM12-433S dengan komunikasi SPI. Sistem akan menerima data secara wireless dari setiap sensor kemudian data tersebut akan ditampilkan menggunakan Visual Basic untuk User Interface. Data tersebut akan ditampilkan dalam sebuah tabel dan grafik untuk setiap masing-masing sensor.
Sistem Telemetri Kualitas Kolam Air Ikan dengan RFM12-433S sebagai Central Unit sudah berhasil dibuat dengan menggunakan 3 pilihan frekuensi dan 3 pilihan kecepatan transfer data. Frekuensi yang digunakan adalah 432MHz, 435MHz dan 437MHz, sedangkan kecepatan transfer data yang digunakan 1kbps, 2kbps dan 5kbps. Sistem ini sudah diuji dengan jarak maksimum pengujian pada jarak 15 meter untuk
pengiriman paket data.
ix
The production growth cultivation of fish freshwater is a business that promised a sizeable profit. This suggests is of great passion in the community to develop the business of cultivating freshwater fish. Of course the production growth is based on with the market demand that is increasing. To cultivate freshwater fish, the quality of water into factors the most support in the development of fish. Hence, writer mean to keep system that could receive data and a wireless data processing be desired.
This system uses ATMEGA8535 for communication with RFM12-433S by communication of SPI. System will receive data is a wireless of any sensors then the data will display use visual basic to a user interface. The data to display in a table and charts for each sensors.
System telemetry the quality of a pool of water fish with rfm12-433s as central unit have successfully created by using 3 choice the frequency and 3 choice speed data transfers. Frequencies used is 432Mhz, 435Mhz and 437Mhz, while speed transfer the data used 1Kbps, 2Kbps and 5Kbps. System has been tested with maximum distance testing at a distance 15 meters of package delivery data.
x
KATA PENGANTAR
Puji dan syukur kepada Tuhan Yesus karena telah memberikan Berkat-Nya sehingga penulis dapat menyelesaiakan laporan tugas akhir dengan baik, dan dapat memperoleh gelar sarjana.
Dalam penulisan tugas akhir ini, penulis menyadari tidak lepas dari seluruh bantuan dan bimbingan dari berbagai pihak. Oleh karena itu, pada kesempatan ini penulis mengucapkan banyak terima kasih kepada :
1. Tuhan Yesus Kristus atas berkat dan anugerah-Nya kepada penulis.
2. Ibu P. H. Prima Rosa, S. Si., M. Sc., selaku Dekan Fakultas Sains dan Teknologi Univesitas Sanata Dharma.
3. Petrus Setyo Prabowo, S.T., M.T., selaku Ketua Program Studi Teknik Elektro Universitas Sanata Dharma.
4. Bapak Pius Yozy Merucahyo, S.T., M.T., selaku dosen pembimbing yang dengan penuh kesabaran membimbing, memberikan saran dan kritik yang
membantu penulis dalam menyelesaikan tulisan ini.
5. Bapak Dr. Linggo Sumarno dan Bapak Wiwien Widyastuti S.T., M.T., selaku dosen penguji yang telah memberikan bimbingan, saran, dan merevisi Tugas Akhir ini
6. Bapak Martanto, M.T. yang telah memberikan saran dan kritik yang membantu penulis dalam menyelesaikan tulisan ini.
7. Seluruh dosen prodi Teknik Elektro dan laboran yang telah memberikan ilmu pengetahuan kepada penulis selama kuliah.
8. Bapak dan Mama tercinta yang selalu mendoakan, terima kasih untuk semua perhatian dan dukungan baik spiritual maupun material.
9. Andreas Bagus Sadewo, terima kasih dengan setia selalu memberikan bantuan, motivasi dan semangat untuk segera menyelesaikan penulisan tugas akhir ini.
10. Keluarga Barana’ XVI yang selalu mengasihiku dan mendukungku, terima
kasih sudah menjadi saudara yang selalu menyemangati.
xi kritik dan saran.
Penulis menyadari bahwa dalam penyusunan laporan Tugas Akhir ini masih mengalami kesulitan dan tidak lepas dari kesalahan. Oleh karena itu, penulis mengharapkan masukan, saran, kritikan yang mendukung agar skripsi ini menjadi lebih baik, dan semoga skripsi ini dapat bermanfaat sebagaimana mestinya.
Yogyakarta, 01 Desember 2015
xii
DAFTAR ISI
Halaman
HALAMAN JUDUL (Bahasa Indonesia) ... i
HALAMAN JUDUL (Bahasa Inggris) ... ii
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP……….…………vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
DAFTAR TABEL ... xvii
BAB I PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat Penelitian ... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 3
BAB II DASAR TEORI... 4
2.1. Kualitas Air Kolam Ikan ... 4
2.1.1. Temperatur Air ... 4
2.1.2. Keasaman Air (pH) ... 4
2.1.3. Kekeruan ... 5
2.1.4. Kandungan Oksigen (DO)... 5
2.2. Atmega8535 ... 5
2.2.1. Fitur-fitur Atmega ... 6
xiii
2.2.4. Serial Peripheral Interface ( SPI ) ... 8
2.3. LCD ( Liquid Crystal Display ) ... 11
2.4. USB to TTL ... 12
2.5. RFM12-433S ... 12
2.6. Modulasi Digital ... 13
2.6.1. Modulasi Digital FSK (Frequency Shift Keying) ... 14
2.6.2. Demodulasi FSK (Frequency Shift Keying) ... 14
2.7. Visual Basic ... 15
2.7.1. Tipe Variabel ... 15
2.7.2. Operator pada Visual Basic dan Urutan Operasinya ... 15
2.7.3. Operator Like ... 16
2.7.4. Deklarasi Variabel ... 16
2.7.5. Mengenal Struktur Kendali ... 16
2.7.6. Deklarasi Konstanta ... 17
2.7.7. Struktur Pengulangan ... 18
2.8. Sistem Pengendali Air Kolam ... 18
BAB III RANCANGAN PENELITIAN ... 20
3.1. Perancangan Perangkat Keras ... 21
3.1.1. Rangkaian Minimum Sistem Atmega 8535 ... 21
3.1.2. Rangkaian LCD ... 22
3.2. Perancangan Perangkat Lunak ... 22
3.2.1. Diagram Alir Program PC ... 22
3.2.2. Diagram Alir Program Mikro... 24
3.2.3. Pengaturan Frekuensi Kerja RFM12 ... 25
3.2.4. Prosedur Pengiriman Data dengan RFM12... 26
3.2.5. Prosedur Penerimaan Data dengan RFM12 ... 27
3.2.6. Format Paket ... 28
3.2.7. Diagram Alir Proses Serial Peripheral Interface (SPI) ... 28
3.2.8. Tampilan data pada PC ... 29
xiv
4.1.
Bentuk Fisik Central Unit Dan Hardware Elektronik ... 324.1.1. Bentuk Fisik Central Unit ... 32
4.1.2. Subsistem Elektonik Alat ... 33
4.2.
Pengujian Alat ... 354.2.1. Pengujian Komunikasi RFM12-433S 1 Arah ... 35
4.2.2. Pengujian Komunikasi RFM12-433S 2 Arah Secara Bergantian ... 39
4.2.3. Pengujian Penerimaan Paket Data ke Remote Unit... 40
4.2.4. Tampilan Visual Pengguna ... 43
4.3.
Pembahasan Program Pengiriman Dan Penerimaan Data Dari Remote Unit ... 454.4.
Pembahasan Program Visual Basic ... 494.5.
Cara Mengatur Frekuensi Dan Baudrate yang Akan Digunakan ... 514.6.
Cara Penggunaan Sistem Secara Keseluruhan ... 52BAB V KESIMPULAN DAN SARAN ... 53
5.1.
Kesimpulan ... 535.2.
Saran ... 53DAFTAR PUSTAKA ... 54
xv
Halaman
Gambar 1.1. Blok Diagram Sistem Telemetri Kualitas ... 1
Gambar 2.1. Gambar mikrokontroler ATMega8535 ... 6
Gambar 2.2. Konfigurasi port Atmega8535 ... 7
Gambar 2.3. Koneksi Master-Slave dengan SPI ... 9
Gambar 2.4. SPI Control Register ... 9
Gambar 2.5. SPI Status Register ... 10
Gambar 2.6. SPI Data Register ... 10
Gambar 2.7. Bentuk fisik LCD 16x2 ... 11
Gambar 2.8. Bentuk fisik USB to TTL ... 12
Gambar 2.9. Konfigurasi Pin RFM12-433S ... 13
Gambar 2.10. Sinyal modulasi digital Frequency Shift Keying (FSK) ... 14
Gambar 2.11. Diagram Blok Demodularot FSK ... 14
Gambar 3.1. Blok Diagram Sistem Yang Dibuat ... 19
Gambar 3.2. Rangkaian Osilator Atmega 8535 ... 20
Gambar 3.3. Rangkaian Reset Atmega 8535 ... 20
Gambar 3.4. Rangkaian Minimum Sistem Atmega 8535 ... 21
Gambar 3.5. Rangkain LCD 16x2 ... 21
Gambar 3.6. Diagram Alir PC ... 22
Gambar 3.7. Gambar Diagram Alir Program Mikro ... 24
Gambar 3.8. Diagram Alir Pengiriman Data RFM12 ... 26
Gambar 3.9. Diagram Alir Penerimaan Data RFM12 ... 27
Gambar 3.10. Tampilan 2D Diagram Batang Pengukuran Kualitas Air Kolam Ikan ... 28
Gambar 3.11. Tampilan 2D Diagram Plot Pengukuran Kualitas Air Kolam Ikan ... 28
Gambar 3.12. Tampilan 3D Diagram Plot Pengukuran Kualitas Air Kolam Ikan ... 29
Gambar 4.1. Kotak Sistem Tampak Atas ... 32
Gambar 4.2. Kotak Sistem Tampak Samping ... 33
Gambar 4.3. Kotak Sistem Tampak Belakan ... 33
Gambar 4.4. Rangkaian Sistem Mikrokontroler dan LCD karakter ... 34
xvi
Gambar 4.6. Rangkaian USB to TTL ... 35
Gambar 4.7. Sinyal Diterima Central Unit Untuk Pengiriman 1 Byte dengan Baudrate 1kbps ... 36
Gambar 4.8. Sinyal Diterima Central Unit Untuk Pengiriman 1 Byte dengan Baudrate 2kbps ... 37
Gambar 4.9. Sinyal Diterima Central Unit Untuk Pengiriman 1 Byte dengan Baudrate 5kbps ... 37
Gambar 4.10. Sinyal Diterima Central Unit Dengan Jarak Pengujian 1 Meter ... 37
Gambar 4.11. Sinyal Diterima Central Unit Dengan Jarak Pengujian 10 Meter ... 38
Gambar 4.12. Sinyal Diterima Central Unit Dengan Jarak Pengujian 20 Meter ... 38
Gambar 4.13. Sinyal Diterima Central Unit Dengan Jarak Pengujian 40 Meter ... 38
Gambar 4.14. Cara Membaca Sinyal Yang Diterima ... 39
Gambar 4.15. Sinyal Penerimaan Paket Data Dengan Baudrate 1kbps ... 42
Gambar 4.16. Sinyal Penerimaan Paket Data Dengan Baudrate 2kbps ... 42
Gambar 4.17. Sinyal Penerimaan Paket Data Dengan Baudrate 5kbps ... 42
Gambar 4.18. Tampilan Pada Visual Basic ... 43
Gambar 4. 19. Tampilan data tersimpan dalam database ... 44
Gambar 4.20. Tampilan Utama ... 51
Gambar 4.21. Tampilan Ketika Tombol OK Ditekan ... 51
xvii
Halaman
Tabel 2.1. Hubungan SCK dan Frekuensi Osilator ... 10
Tabel 2.2. Konfigurasi Pin LCD M1632 ... 11
Tabel 2.3. Fungsi Pin RFM12-433S ... 13
Tabel 2.4. Tipe variabel, pemakaian storage dan jangkauan masing-masing ... 15
Tabel 2.5. Operator pada Visual Basic dan urutan operasi dari atas ke bawah ... 16
Tabel 2.6. Karakter Dalam Pencocokan Pola Pada Operator Like ... 16
Tabel 2.7. Aksi Pengendalian ... 19
Tabel 3.1. Format Pengaturan Frekuensi ... 25
Tabel 3.2. Format Paket Data ... 28
Tabel 4.1. Hasil Pengujian RFM12-433S 1 Arah ... 36
Tabel 4.2. Hasil Pengujian Pengujian RFM12-433S 2 Arah Bergantian ... 40
Tabel 4.3. Hasil Pengujian Pengiriman Paket Data ... 41
Tabel 4.4. Format Paket Data ... 45
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Pertumbuhan produksi budidaya ikan air tawar merupakan usaha yang menjanjikan keuntungan yang cukup besar. Kenaikan produksi budidaya ikan dalam kolam air tawar cukup pesat yaitu berkisar 11% setiap tahun. Hal ini menujukkan ada gairah besar di masyarakat untuk mengembangkan usaha budidaya ikan air tawar. Tentunya pertumbuhan produksi ini mengacu pada permintaan pasar yang terus meningkat. Untuk membudidayakan ikan air tawar, kualitas air menjadi faktor yang paling mendukung dalam perkembangan ikan. Banyak ikan yang mati karena kualitas air yang buruk, sehingga produksi ikan pun menjadi menurun dan pengusaha mengalami kerugian yang besar.
Perkembangan ilmu pengetahuan dan teknologi telah mengalami percepatan yang tinggi. Keadaan tersebut membuat banyak hal dapat dilakukan dengan lebih mudah dan efisien. Seiring perkembangan teknologi di dunia elektronika, maka semakin dikembangkan otomasi dan efisiensi dalam bekerja khususnya untuk kehidupan manusia.
Untuk mewujudkan hal tersebut perlu adanya sebuah perangkat elektronika yang dapat memenuhi kebutuhan yang dapat menunjang kemudahan bagi manusia.
Berdasarkan hal tersebut, diperlukan sebuah alat yang digunakan untuk monitoring kualitas air kolam ikan. Alat ini terbagi menjadi 3 bagian, yaitu bagian pertama yang tediri dari kolam ikan, sensor, dan pengendali kualitas air, bagian kedua yang terdiri dari remote unit, dan bagian ketiga yeng terdiri dari central unit seperti ditunjukkan pada gambar 1.1.
penelitian yang sudah membuat sistem untuk memonitoring kualitas kolam air ikan. Salah
satu penelitian yang sudah ada dilakukan oleh Charles Wilianto, dalam penelitian berjudul
“Sistem Komunikasi Pengendalian Kualitas Air Kolam Ikan Berbasis ATMega 128”.
Dalam penelitian yang dilakukan Charles Wilianto apabila cental unit mengirimkan perintah untuk mengambil data ke remote unit, Remote unit mengumpulkan data dari setiap sensor dan disatukan menjadi paket data yang kemudian dikirimkan ke cental unit menggunakan kabel untuk kemudian dipisahkan kembali dan ditampilkan dalam bentuk tabel dan grafik. Metode pengiriman paket data masih secara manual dan mengunakan kabel untuk menghubungkan antara remote unit dengan central unit [1].
Menggunakan konsep penelitian yang sama namun dengan metode yang berbeda, penulis yang berkonsentrasi pada bagian central unit akan menerima paket data secara otomatis dari remote unit dengan menggunakan wireless sebagai penghubung antara remote unit dengan central unit. Setiap 60 menit remote unit akan mengirimkan paket data ke central unit. Paket data tersebut kemudian dipisahkan untuk kemudian diterjemahkan dan ditampilkan di monitor. Paket data yang diterima disimpan ke dalam tabel dan dapat dibuat grafik.
Maka, dengan Sistem Telemetri Kualitas Kolam Air Ikan dengan RFM12-433S sebagai central unit, semua data dapat dilihat melalui monitor pada central unit . Sistem ini memudahkan dalam mengontrol dan mengukur kualitas air kolam ikan seperti tingkat
derajat keasaman (pH), kekeruhan, kandungan oksigen (DO), dan temperatur.
1.2.
Tujuan dan Manfaat Penelitian
Penelitian ini bertujuan untuk menghasilkan suatu sistem untuk menerima data yang dikirimkan dari remote unit Sistem Telemetri Kualitas Kolam Air Ikan dengan RFM12-433S dan data tersebut akan ditampilkan melalui PC pada central unit. Manfaat dari penelitian adalah memudahkan pemantauan kualitas air kolam ikan sehingga monitoring dapat dilakukan selama 24 jam dan dapat dilakukan dari jarak jauh.
1.3.
Batasan Masalah
Batasan masalah dalam penelitian ini adalah :
b. Menggunakan Atmega 8535 untuk komunikasi dengan RFM12-433S dengan komunikasi SPI.
c. Menggunakan AVR Codevition untuk program Atmega 8535. d. Menggunakan Visual Basic untuk User Interface.
e. Menggunakan Miccrosoft Access untuk penyimpanan database.
f. Paket data yang diterima, disimpan di dalam tabel dan dapat dibuat grafik.
g. Data sensor yang diterima diawali dengan inisial data sensor yang dikirimkan dan diakhiri dengan karakter pagar (#).
h. Batas pengujian pada ruang terbuka dengan jarak 5 meter, 10 meter, 15 meter. i. Frekuensi yang digunakan yaitu 432MHz, 435MHz, dan 437MHz.
j. Batas pengujian baudrate pada 1kbps, 2kbps, dan 5kbps.
1.4.
Metode Penelitian
Metode penulisan yang digunakan adalah :
a. Studi lineatur berupa pengumpulan referensi buku – buku, referensi dari internet berupa jurnal dan artikel.
b. Studi kasus terhadap alat yang sudah dibuat sebelumnya. Tahap ini dilakukan guna
memahami prinsip kerja dari alat yang telah dibuat sebelumnya.
c. Perancangan sistem hardware dan software. Tahap ini bertujuan mencari bentuk
model yang optimal dari sistem yang dibuat dengan mempertimbangkan dari berbagai faktor permasalahan dan kebutuhan yang telah ditentukan.
d. Pembuatan sistem hardware dan software. Sistem bekerja apabila, central unit dapat menerima data yang dikirimkan dari remote unit secara otomatis dengan menggunakan wireless dan ditampilkan pada monitor PC atau laptop.
4
DASAR TEORI
2.1.
Kualitas Air Kolam Ikan
Secara umum kualitas air berhubungan dengan kandungan bahan terlarut di dalamnya. Kesesuaian lingkungan hidup untuk setiap ikan berbeda, tergantung pada jenis ikan, jenis ikan tertentu yang sesuai dengan kondisi lingkungan dapat bertumbuh dan berkembang. Sebaliknya, jika keadaan tidak sesuai dapat menghambat pertumbuhan dan perkembangannya. Beberapa faktor dapat mempengaruhi kualitas air. Kualitas air tersebut antara lain temperatur, derajat keasaman (pH), derajat kekeruan, serta kandungan oksigen[1].
2.1.1. Temperatur Air
Temperatur air sangat berpengaruh pada pertumbuhan dan perkembangan ikan. Temperatur air yang tidak cocok, misalnya terlalu tinggi atau terlalu rendah dapat menyebabkan ikan tidak dapat bertumbuh dengan baik. Perubahan suhu yang mendadak
berpengaruh buruk pada kehidupan ikan karena ikan tidak dapat hidup dengan baik pada suhu yang telalu dingin atau terlalu rendah. Temperatur yang cocok untuk pertumbuhan
ikan adalah berkisar antara 15ºC - 30ºC dan perbedaan suhu antara siang dan malam kurang dari 5ºC [3].
2.1.2. Keasaman Air (pH)
Tingkat keasaman air dinyatakan dalam pH air. Derajat keasaman (pH) adalah
salah satu faktor penting kualitas air yang mempengaruhi kesehatan ikan. Derajat
keasaman diukur oleh kuantitas hidrogen dan hidroksil yang ada di air kolam. Skala
pengukurannya dari 1 – 14. Jika ion hidrogen terlalu banyak maka pH terlalu asam.
Sedangkan jika hidroksilnya lebih tinggi maka air terlalu basa. Besarnya pH air yang
2.1.3. Kekeruhan
Kecerahan atau tingkat kekeruhan air pada hakekatnya menunjukkan populasi
plankton dan kandungan material lainya yang terlarut dalam air, biasanya diukur dengan menggunakan Secci Disk atau Turbidity Meter. Kecerahan yang baik berkisar antara 30 – 40 cm, karena pada kondisi itu populasi plankton cukup ideal untuk pakan alami dan material terlarut cukup rendah[6].
Kecerahan yang ideal juga menunjukkan kondisi air yang baik, karena penurunan kualitas air banyak disebabkan oleh tingginya kadar bahan organik dan anorganik terlarut. Disamping itu, plankton yang terlalu tinggi populasinya menyebabkan tingginya pH pada siang hari dan punurunan drastis kadar DO pada malam hari terutama jika plankton yang dominan adalah phytoplankton[6].
Satuan yang biasa dipakai dalam kekeruhan yaitu NTU (Nephelometric Turbidity Units).Kekeruhan juga sering digambarkan dengan satuan TSS (Total Suspended Solids) atau mg/1 (milligram per liter). Air murni memiliki NTU kurang dari 1 atau 0 mg/1[5]. Standar kekeruhan air yang baik bagi ikan harus kurang dari 500 NTU, karena lebih dari itu dapat mengakibatkan pertumbuhan ikan menjadi terganggu[8].
2.1.4. Kandungan Oksigen (DO)
Kekurang kadar oksigen, maka akan menyebabkan kematian ikan. Kandungan
oksigen terkait dengan suhu air, sehingga apabila ada kenaikan suhu air, maka kandungan
oksigennya turun, dan demikian sebaliknya. Kandungan oksigen terlarut dalam air cocok
untuk kehidupan dan pertumbuhan ikan gurami sebesar 5ppm, untuk ikan nila lebih dari
3ppm, ikan mas berkisar 5 – 7ppm (5 – 7cc /liter air)[2]. Pengaliran air yang baik dan
permukaan kolam yang selalu terbuka dapat meningkatkan kadar oksigen dalam.
2.2.
Atmega8535
Gambar 2.1.Gambar mikrokontroler ATMega8535
ATMega8535 adalah mikrokontroler CMOS 8 bit daya rendah berbasis arsitektur RISC. Instruksi dikerjakan pada satu siklus clock, ATMega8535 mempunyai throughputmendekati 1 MIPS per MHz, hal ini membuat ATMega8535 dapat bekerja dengan kecepatan tinggi walaupun dengan penggunaan daya rendah.Mikrokontroler ATmega8535 memiliki beberapa fitur atau spesifikasi yang menjadikannya sebuah solusi pengendali yang efektif untuk berbagai keperluan[7].
2.2.1. Fitur-fitur Atmega8535
Di dalam Atmega8535 terdapat beberapa fitur, seperti berikut [9]: a. Saluran I/O sebanyak 32 buah, yaitu Port A,Port B,Port C dan Port D. b. ADC 8 channel 10 bit.
c. Tiga buah Timer/Counter dengan kemampuan pembanding. d. CPU yang terdiri atas 32 buah register.
e. Watchdogtimer dengan osilator internal. f. SRAM sebesar 512 byte.
g. Memori Flash sebesar 8 KB dengan kemampuan Read While Write. h. Interrupt internal dan eksternal
i. Port antarmuka SPI (Serial Peripheral Interface).
j. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. k. Antarmuka komparator analog.
2.2.2. Konfigurasi Pin ATMega8535
Gambar 2.2. Konfigurasi port Atmega8535 [7]
Secara umum konfigurasi dan fungsi pin ATMega8535 ditunjukkan pada gambar 2.2 dan dapat dijelaskan sebagai berikut:
a. VCC Input sumber tegangan (+). b. GNDGround (-) .
c. Port A (PA7 … PA0) Berfungsi sebagai input analog dari ADC (Analog to Digital Converter). Port ini juga berfungsi sebagai port I/O dua arah, jika ADC tidak digunakan.
d. Port B (PB7 … PB0) Berfungsi sebagai port I/O dua arah. Port PB5, PB6 dan PB7 juga berfungsi sebagai MOSI, MISO dan SCK yang dipergunakan pada proses downloading.
e. Port C (PC7 … PC0) Berfungsi sebagai port I/O dua arah. Fungsi lain port ini
selengkapnya bisa dibaca pada buku petunjuk ”AVR ATMega8535”
f. Port D (PD7 … PD0) Berfungsi sebagai port I/O dua arah. Port PD0 dan PD1 juga
berfungsi sebagai RXD dan TXD, yang dipergunakan untuk komunikasi serial. g. RESET Inputreset.
h. XTAL1 Input ke amplifier inverting osilator dan input ke sirkuit clockinternal. i. XTAL2 Output dari amplifier inverting osilator.
Transmitter)
USART merupakan komunikasi yang memiliki fleksibilitas tinggi, yang dapat digunakan untuk melakukan transfer data baik antar mikrokontroler maupun dengan modul-modul eksternal termasuk PC yang memiliki fitur UART.
USART memungkinkan transmisi data baik secara syncrhronous maupun asyncrhronous, sehingga dengan memiliki USART pasti kompatibel dengan UART. Pada ATmega8535, secara umum pengaturan mode syncrhronous maupun asyncrhronous adalah sama. Perbedaannya hanyalah terletak pada sumber clock saja. Jika pada mode asyncrhronous masing-masing peripheral memiliki sumber clock sendiri, maka pada mode syncrhronous hanya ada satu sumber clock yang digunakan secara bersama-sama. Dengan demikian, secara hardware untuk mode asyncrhronous hanya membutuhkan 2 pin yaitu TXD dan RXD, sedangkan untuk mode syncrhronous harus 3 pin yaitu TXD, RXD dan XCK. Komunikasi serial data antara master dan slave pada SPI diatur melalui 4 buah pin yang terdiri dari SCLK, MOSI, MISO, dan SS sbb:
1. SCLK dari master ke slave yang berfungsi sebagai clock. 2. MOSI jalur data dari master dan masuk ke dalam slave. 3. MISO jalur data keluar dari slave dan masuk ke dalam master.
4. SS (slave select) merupakan pin yang berfungsi untuk mengaktifkan slave.
2.2.4. Serial Peripheral Interface ( SPI )
Serial Peripheral Interface ( SPI ) adalah protokol data serial sinkron digunakan oleh mikrokontroler untuk berkomunikasi dengan satu atau lebih perangkat periferal cepat jarak pendek. Hal ini juga dapat digunakan untuk komunikasi antara dua mikrokontroler. Dengan koneksi SPI selalu ada perangkat satu master (biasanya mikrokontroler) yang mengontrol perangkat periferal
Komunikasi SPI membutuhkan 3 jalur yaitu MOSI, MISO, dan SCK. Melalui komunikasi ini data dapat saling dikirimkan baik antara mikrokontroller maupun antara mikrokontroller dengan peripheral lain di luar mikrokontroller. Penjelasan 3 jalur utama dari SPI adalah sebagai berikut :
2. MISO : Master Input Slave Output, yaitu jika dikonfigurasi sebagai Master maka pin MISO sebagai input tetapi jika dikonfigurasi sebagai Slave maka pin MISO
sebagai output.
3. CLK : Clock, jika dikonfigurasi sebagai Master maka pin CLK berlaku sebagai output tetapi jika dikonfigurasi sebagai Slave maka pin CLK berlaku sebagai input.
Ada dua maca SPI, yaitu satu master dengan satu slave dan satu master dengan banyak slave. Pada gambar 2.3 ditunjukkan sambungan antar master dan slave dengan SPI.
Gambar 2.3. Koneksi Master-Slave dengan SPI [7]
Register yang berhubungan dengan SPI terdapat seperti gambar 2.4.
Gambar 2.4. SPI Control Register [7]
Setiap bit dari register SPCR mempunyai fungsinya masing-masing. Dan untuk mengaktifkan SPI, maka perlu diketahui setiat bit register tersebut, sebagai berikut:
a. Bit 7 – SPIE: SPI Interrupt Enable. SPIE digunakan untuk mengaktifkan
interupsi SPI.
b. Bit-6 SPE (SPI Enable). SPE digunakan untuk mengaktifkan dan menonaktifkan
komunikasi SPI dimana jika SPI bernilai 1 maka komunikasi SPI aktif sedangkan jika bernilai 0 maka komunikasi SPI tidak aktif.
c. Bit 5 – DORD: Data Order. DORD digunakan untuk memilih urutan pengiriman
sebagai master atau slave secara software dimana jika MSTR bernilai 1 maka terkonfigurasi sebagai master sedangkan MSTR bernilai 0 maka terkonfigurasi sebagai slave. Pengaturan bit MSTR ini tidak akan bisa dilakukan jika pin SS dikonfigurasi sebagai input karena jika pin SS dikonfigurasi sebagai input maka penentuan master atau slavenya otomatis dilakukan secara hardware yaitu dengan membaca level tegangan pada SS.
e. Bit-3 CPOL dan Bit-2 CPHA digunakan untuk pengaturan polaritas dan fasa dari
clock.
f. Bit-1 SPR1/0 (SPI Clock Rate Select) SPR1 dan SPR0 digunakan untuk
menentukan kecepatan clock yang digunakan dalam komunikasi SPI. Tabel 2.1. Hubungan SCK dan Frekuensi Osilator [7]
SPI2x SPR1 SPR0 SCK Frequency
0 0 0 4
0 0 1 16
0 1 0 64
0 1 1 128
1 0 0 2
1 0 1 8
1 1 0 32
1 1 1 64
Gambar 2.5. SPI Status Register [7]
SPIF (SPI Interrupt Flag) merupakan bendera yang digunakan untuk mengetahui bahwa proses pengiriman data 1 byte sudah selesai. Jika proses pengiriman data sudah selesai maka SPIF akan bernilai satu (high). SPIF ini berada dalam SPI Status Register (SPSR).
SPI Data Register (SPDR) SPDR merupakan register yang digunakan untuk menyimpan data yang akan dikirim atau diterima pada komunikasi SPI.
2.3.
LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah komponen yang berfungsi untuk menampilkan suatu karakter pada suatu tampilan (display) dengan bahan utama yang digunakan berupa Liquid Crystal Display[11].Apabila diberi arus listrik sesuai dengan jalur yang telah dirancang pada kontruksi LCD, Liquid Crystal Display akan menghasilkan suatu cahaya dan cahaya tersebut akan membentuk karakter tertentu.
LCD yang digunakan adalah tipe M1632.LCD M1632 merupakan modul LCD dengan tampilan 2x16 (2 baris, 16 kolom) dengan konsumsi daya rendah[10]. LCD tipe M1632 yang ditunjukkan pada gambar 2.7
[image:30.595.83.518.252.754.2].
Gambar 2.7. Bentuk fisik LCD 16x2 [10]
Tabel 2.2. Konfigurasi Pin LCD M1632
No. Nama Fungsi
1 Vss 0V (GND)
2 Vcc +5V
3 VLC LCD Contrast Voltage
4 RS Register Select
H: Data Input; L: Instruction Input
5 RD Read/Write
H: Read; L: Write
6 EN Enable Signal
7 D0
Data Bus
8 D1
9 D2
10 D3
11 D4
12 D5
13 D6
14 D7
USB to TTL adalah sebuah modul yang berguna untuk berkomunikasi dengan peralatan eksternal dengan port USB (Universal Serial Bus) secara serial seperti pada protokol RS-232 namun pada tingkatan tegangan signal yang kompatibel dengan TTL, level tegangan yang umum digunakan pada UART mikrokontroler berbasis 5V[14]. Modul ini memiliki beberapa fitur seperti berikut:
a. Spesifikasi USB 2.0 dan kompatibel dengan kecepatan sampai 12Mbps.
b. Standar USB jenis Amale dan TTL 5pin konektor. 5pins untuk TXD RXD GND 3.3V 5V.
c. Baud rates: 300 bps to 1.5 Mbps.
d. Byte receive buffer; 640 byte transmit buffer. e. Temperature Range: -40 to +85.
f. Supports Windows 98SE, 2000, XP, Vista, Window7, Mac OS 9, Mac OS X &
Linux 2.40.
[image:31.595.85.517.197.632.2]Berikut bentuk fisik dari USB to TTL ditunjukkan pada gambar 2.8.
Gambar 2.8. Bentuk fisik USB to TTL[14].
2.5.
RFM12-433S
RFM12-433S merupakan modul transceiver yang menggunakan modulasi Frequency Shift Keying dengan menggunakan frekuensi kerja 433 Mhz [13]. Karena modul ini merupakan transceiver maka modul ini bisa dioperasikan menjadi transmitter maupun
Gambar 2.9. Konfigurasi Pin RFM12-433S [12]
Tabel 2.3. Fungsi Pin RFM12-433S [12]
Definisi Tipe Fungsi
nINT/VDI DI/ DO Input interupsi (aktif rendah) / indikator data benar
VDD S Positif power supply
SDI DI SPI data input
SCK DI SPI clock input
nSel DI Chip select (aktif rendah)
SDO DO Serial data output dengan bus
nIRQ DO Intereups request output (aktif rendah)
FSK/DATA/Nffs DI/DO/DI Transmit FSK data input/ Received data output (FIFO not used)/ FIFO select
DCLK/CFIL/FFIT DO/AIO/DO
Clock output (no FIFO )/ external filter capacitor(analog mode)/ FIFO
interrupts(active high)when FIFO level set to 1, FIFO empty interruption can
be achieved
CLK DO Clock output for external microcontroler
nRES DIO Reset output (active low)
GND S Power ground
2.6.
Modulasi Digital
pembahasan pada sistem modulasi FSK dan demodulasi FSK[13].
2.6.1. Modulasi Digital FSK (Frequency Shift Keying)
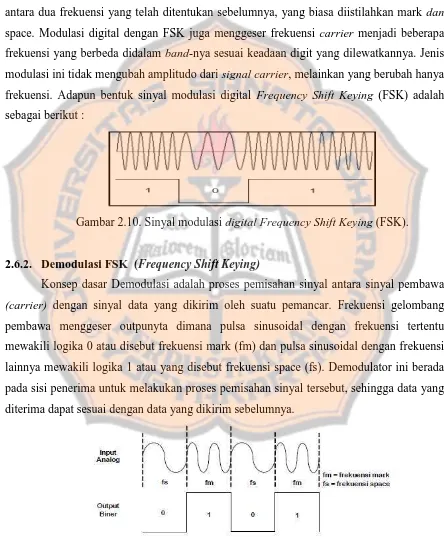
[image:33.595.80.524.190.739.2]Modulasi Digital FSK (Frequency Shift Keying) merupakan sejenis Frequency Modulation (FM), dimana sinyal pemodulasinya (sinyal digital) menggeser outputnya antara dua frekuensi yang telah ditentukan sebelumnya, yang biasa diistilahkan mark dan space. Modulasi digital dengan FSK juga menggeser frekuensi carrier menjadi beberapa frekuensi yang berbeda didalam band-nya sesuai keadaan digit yang dilewatkannya. Jenis modulasi ini tidak mengubah amplitudo dari signal carrier, melainkan yang berubah hanya frekuensi. Adapun bentuk sinyal modulasi digital Frequency Shift Keying (FSK) adalah sebagai berikut :
Gambar 2.10. Sinyal modulasi digital Frequency Shift Keying (FSK).
2.6.2. Demodulasi FSK (Frequency Shift Keying)
Konsep dasar Demodulasi adalah proses pemisahan sinyal antara sinyal pembawa (carrier) dengan sinyal data yang dikirim oleh suatu pemancar. Frekuensi gelombang pembawa menggeser outpunyta dimana pulsa sinusoidal dengan frekuensi tertentu mewakili logika 0 atau disebut frekuensi mark (fm) dan pulsa sinusoidal dengan frekuensi lainnya mewakili logika 1 atau yang disebut frekuensi space (fs). Demodulator ini berada pada sisi penerima untuk melakukan proses pemisahan sinyal tersebut, sehingga data yang diterima dapat sesuai dengan data yang dikirim sebelumnya.
2.7.
Visual Basic
Visual Basic adalah salah suatu development tools untuk membangun aplikasi dalam lingkungan Windows. Dalam pengembangan aplikasi, Visual Basic menggunakan pendekatan Visual untuk merancang user interface dalam bentuk form, sedangkan untuk kodingnya menggunakan dialok bahasa Basic yang cenderung mudah dipelajari.Visual Basic telah menjadi tools yang terkenal bagi para pemula maupun para developer dalam pengembangan aplikasi skala kecil sampai ke skala besar.
2.7.1. Tipe Variabel
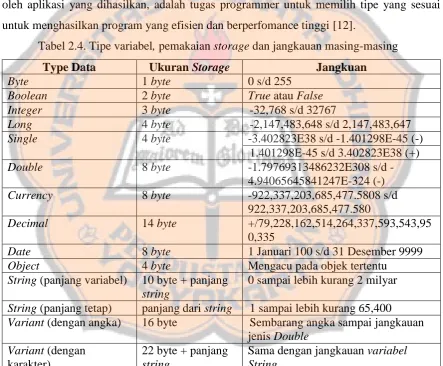
[image:34.595.83.527.284.650.2]Ketepatan pemilihan tipe variabel akan sangat menentukan pemakaian resources oleh aplikasi yang dihasilkan, adalah tugas programmer untuk memilih tipe yang sesuai untuk menghasilkan program yang efisien dan berperfomance tinggi [12].
Tabel 2.4. Tipe variabel, pemakaian storage dan jangkauan masing-masing
Type Data Ukuran Storage Jangkuan
Byte 1 byte 0 s/d 255
Boolean 2 byte True atau False
Integer 3 byte -32,768 s/d 32767
Long 4 byte -2,147,483,648 s/d 2,147,483,647
Single 4 byte -3.402823E38 s/d -1.401298E-45 (-)
1.401298E-45 s/d 3.402823E38 (+)
Double 8 byte 1.79769313486232E308 s/d
-4.94065645841247E-324 (-)
Currency 8 byte -922,337,203,685,477.5808 s/d
922,337,203,685,477.580
Decimal 14 byte +/79,228,162,514,264,337,593,543,95
0,335
Date 8 byte 1 Januari 100 s/d 31 Desember 9999
Object 4 byte Mengacu pada objek tertentu
String (panjang variabel) 10 byte + panjang string
0 sampai lebih kurang 2 milyar
String (panjang tetap) panjang dari string 1 sampai lebih kurang 65,400 Variant (dengan angka) 16 byte Sembarang angka sampai jangkauan
jenis Double Variant (dengan
karakter)
22 byte + panjang string
Sama dengan jangkauan variabel String
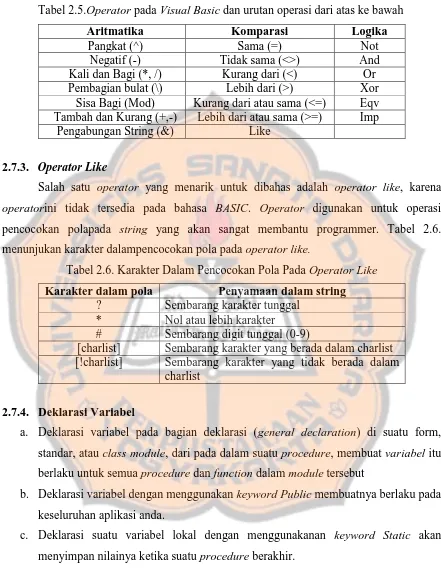
2.7.2. Operator pada Visual Basic dan Urutan Operasinya
benar, Tabel 2.5 menunjukkan operator dan urutan operasinya dari atas kebawah.
Tabel 2.5.Operator pada Visual Basic dan urutan operasi dari atas ke bawah
Aritmatika Komparasi Logika
Pangkat (^) Sama (=) Not
Negatif (-) Tidak sama (<>) And
Kali dan Bagi (*, /) Kurang dari (<) Or Pembagian bulat (\) Lebih dari (>) Xor
Sisa Bagi (Mod) Kurang dari atau sama (<=) Eqv Tambah dan Kurang (+,-) Lebih dari atau sama (>=) Imp
Pengabungan String (&) Like
2.7.3. Operator Like
Salah satu operator yang menarik untuk dibahas adalah operator like, karena operatorini tidak tersedia pada bahasa BASIC. Operator digunakan untuk operasi pencocokan polapada string yang akan sangat membantu programmer. Tabel 2.6. menunjukan karakter dalampencocokan pola pada operator like.
Tabel 2.6. Karakter Dalam Pencocokan Pola Pada Operator Like
Karakter dalam pola Penyamaan dalam string ? Sembarang karakter tunggal
* Nol atau lebih karakter
# Sembarang digit tunggal (0-9)
[charlist] Sembarang karakter yang berada dalam charlist [!charlist] Sembarang karakter yang tidak berada dalam
charlist
2.7.4. Deklarasi Variabel
a. Deklarasi variabel pada bagian deklarasi (general declaration) di suatu form, standar, atau class module, dari pada dalam suatu procedure, membuat variabel itu berlaku untuk semua procedure dan function dalam module tersebut
b. Deklarasi variabel dengan menggunakan keyword Public membuatnya berlaku pada keseluruhan aplikasi anda.
c. Deklarasi suatu variabel lokal dengan menggunakanan keyword Static akan menyimpan nilainya ketika suatu procedure berakhir.
2.7.5. Mengenal Struktur Kendali
berjalan dari kiri ke kanan dan dari atas kebawah. Hanya program yang sangat sederhana dapat ditulis tanpa statement control-flow. Struktur keputusan yang didukung oleh Visual
Basic adalah sebagai berikut : a. If…Then
Kondisi biasanya berupa suatu perbandingan, maupun ekspresi yang menghasilkan nilai numerik.Visual Basic menginterpretasikan Falsesebagai nol (0), dan True sebagai bukan nol.
b. If…Then…Else
Visual Basic awalnya akan mencoba kondisi1. Jika False, maka Visual Basic akan memeriksa kondisi2, dan seterusnya sampai menemukan suatu kondisi True untuk dijalankan blok pernyataannya.
c. Select Case
Visual Basic menyediakan struktur Select Case sebagai suatu alternatif terhadap If...Then...Else.Suatu Select Case statement memiliki kemampuan yang sama dengan If…Then…Else…, tetapi membuat code lebih mudah dibaca. Struktur Select Case bekerja dengan suatu percobaan tunggal yang hanya dievaluasi satu kali pada bagian atas struktur.Visual Basic then membandingkan hasil ekspresi dengan nilai pada setiap case didalam struktur tersebut, jika ada yang sesuai, akan dijalankan blok statement yang sesuai.
2.7.6. Deklarasi Konstanta
Membuat code dapat ditangani dengan menggunakan suatu konstanta[12]. Suatu konstanta adalah nama yang menyimpan dari suatu nilai yang tidak dapat berubah. Ada dua sumber dari suatu konstanta :
a. Intrinsic atau System-defined konstanta yang disediakan oleh suatu aplikasi atau kontrol. Konstanta Visual Basic terdaftar pada Visual Basic (VB), Visual Basic for Application (VBA), dan Data Access (DAO).
b. Symbolic atau User-defined konstanta adalah dideklarasikan dengan menggunakan statement Const.
c. Membuat suatu konstanta yang mana hanya ada dalam suatu procedure, deklarasikan di dalam procedure tersebut
dengan keyword Public sebelum kata Const.
2.7.7. Struktur Pengulangan
Struktur loop memperbolehkan untuk melaksanakan sekelompok baris lebih dari satu kali [12]:
a. Do…Loop
Ketika Visual menjalankan Do loop ini, pertama kali akan di coba kondisinya, jika kondisi False (0), akan diloncati semua statements yang mengikuti kondisi tersebut. Visual Basic akan menjalankan statements jika kondisi benar dan kembali ke Do…Loop berikutnya.
b. For…Next
Do loops bekerja dengan baik, ketika anda tidak tahu berapa bayak kali untuk butuhkan untuk menjalankan statement. Ketika anda mengetahui harus menjalankan statement sejumlah kali, bagaimanapun For…Next adalah pilihan yang lebih baik. Tidak seperti Do Loop, For…loop menggunakan suatu variabel yang disebut counter yang mana akan bertambah atau berkurang pada setiap perulangan.
c. Do While…Loop
Pengulangan Do While…Loop digunakan apabila jumlah pengulangan
belum diketahui, dan nilai awal pengulangan harus diinialisasi terlebih dahulu. Dalam program terdapat counter untuk menaikkan nilai pengulangan.
2.8.
Sistem Pengendali Air Kolam
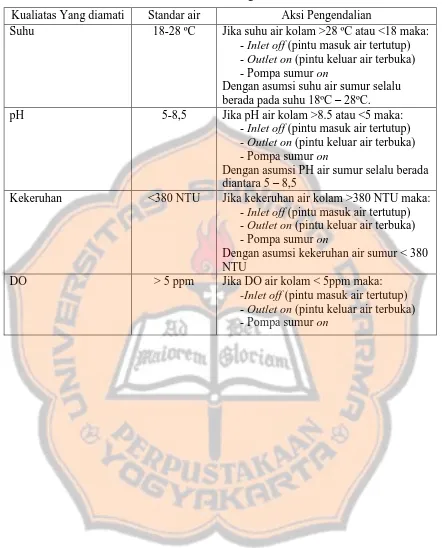
[image:37.595.81.530.194.570.2]Tabel 2.7. Aksi Pengendalian
Kualiatas Yang diamati Standar air Aksi Pengendalian
Suhu 18-28 ºC Jika suhu air kolam >28 ºC atau <18 maka: - Inlet off (pintu masuk air tertutup) - Outlet on (pintu keluar air terbuka) - Pompa sumur on
Dengan asumsi suhu air sumur selalu berada pada suhu 18ºC – 28ºC.
pH 5-8,5 Jika pH air kolam >8.5 atau <5 maka:
- Inlet off (pintu masuk air tertutup) - Outlet on (pintu keluar air terbuka) - Pompa sumur on
Dengan asumsi PH air sumur selalu berada diantara 5 – 8,5
Kekeruhan <380 NTU Jika kekeruhan air kolam >380 NTU maka: - Inlet off (pintu masuk air tertutup) - Outlet on (pintu keluar air terbuka) - Pompa sumur on
Dengan asumsi kekeruhan air sumur < 380 NTU
DO > 5 ppm Jika DO air kolam < 5ppm maka:
20
RANCANGAN PENELITIAN
Perancangan sistem telemetri kualitas kolam air ikan sebagai central unit ini dibagi menjadi menjadi dua bagian utama, yaitu:
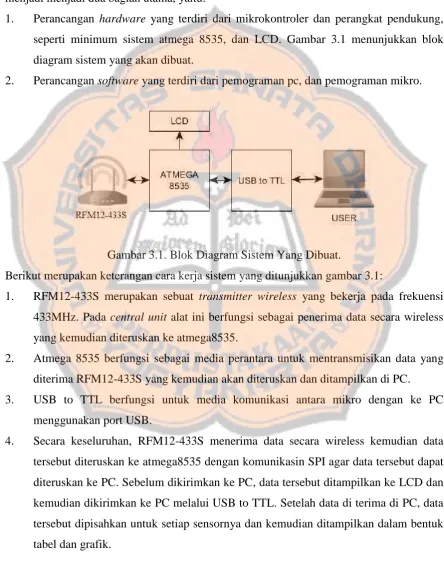
1. Perancangan hardware yang terdiri dari mikrokontroler dan perangkat pendukung, seperti minimum sistem atmega 8535, dan LCD. Gambar 3.1 menunjukkan blok diagram sistem yang akan dibuat.
2. Perancangan software yang terdiri dari pemograman pc, dan pemograman mikro.
Gambar 3.1. Blok Diagram Sistem Yang Dibuat.
Berikut merupakan keterangan cara kerja sistem yang ditunjukkan gambar 3.1:
1. RFM12-433S merupakan sebuat transmitter wireless yang bekerja pada frekuensi
433MHz. Pada central unit alat ini berfungsi sebagai penerima data secara wireless yang kemudian diteruskan ke atmega8535.
2. Atmega 8535 berfungsi sebagai media perantara untuk mentransmisikan data yang diterima RFM12-433S yang kemudian akan diteruskan dan ditampilkan di PC. 3. USB to TTL berfungsi untuk media komunikasi antara mikro dengan ke PC
menggunakan port USB.
[image:39.595.80.525.194.771.2]3.1.
Perancangan Perangkat Keras
3.1.1. Rangkaian Minimum Sistem Atmega 8535
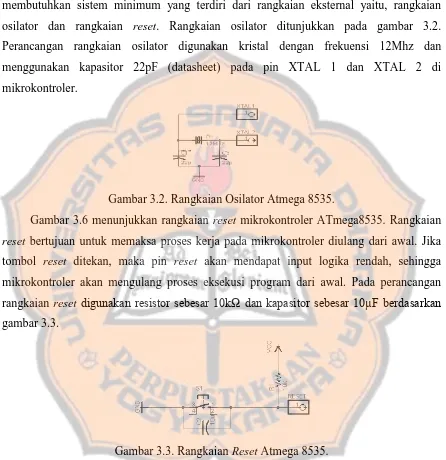
[image:40.595.83.529.159.619.2]Rangkaian sistem minimum berfungsi sebagai I/O untuk mengolah data dan mengatur komunikasi untuk transmitter dan komunikasi ke PC. Mikrokontroler membutuhkan sistem minimum yang terdiri dari rangkaian eksternal yaitu, rangkaian osilator dan rangkaian reset. Rangkaian osilator ditunjukkan pada gambar 3.2. Perancangan rangkaian osilator digunakan kristal dengan frekuensi 12Mhz dan menggunakan kapasitor 22pF (datasheet) pada pin XTAL 1 dan XTAL 2 di mikrokontroler.
Gambar 3.2. Rangkaian Osilator Atmega 8535.
Gambar 3.6 menunjukkan rangkaian reset mikrokontroler ATmega8535. Rangkaian reset bertujuan untuk memaksa proses kerja pada mikrokontroler diulang dari awal. Jika tombol reset ditekan, maka pin reset akan mendapat input logika rendah, sehingga mikrokontroler akan mengulang proses eksekusi program dari awal. Pada perancangan rangkaian reset digunakan resistor sebesar 10kΩ dan kapasitor sebesar 10µF berdasarkan
gambar 3.3.
Gambar 3.3. Rangkaian Reset Atmega 8535.
Gambar 3.4. Rangkaian Minimum Sistem Atmega 8535
3.1.2. Rangkaian LCD
[image:41.595.83.523.68.681.2]LCD yang digunakan pada perancangan ini adalah LCD character 16x2 yang berfungsi untuk menampilkan data yang diterima dari pemancar sebelum dikirim ke PC. Berdasarkan datasheet tegangan kontras (pin Vo) maksimum LCD ini adalah 5 volt, sehingga digunakan sebuah variable resistor sebesar 10 kOhm yang digunakan untuk membatasi tegangan pada pin ini. Rangkaian LCD character 16x2 ditunjukkan pada gambar 3.5.
Gambar 3.5. Rangkain LCD 16x2
3.2.
Perancangan Perangkat Lunak
3.2.1. Diagram Alir Program PC
masuk dan menampilkannya pada PC dalam bentuk tabel dan grafik. PC tidak dapat
langsung menerima data yang diterima melalui RFM12 karena modul menggunakan sistem komunikasi SPI sehingga dibutuhkan sebuah mikrokontroler sebagai jembatan komunikasi untuk menerima data dari RFM12 ke PC.
Sebelum mengirimkan data, remote unit mengirimkan karakter “p” ke central unit untuk memeriksa koneksi dan kesiapan dari central unit untuk menerima data, apabila central unit siap untuk menerima paket data central unit mengirimkan karakter “y”, setelah remote unit menerima karakter “y”, remote unit mengirimkan paket data yang berisi data yang diambil dari setiap sensor. Setiap paket data memiliki 46 karakter, dimana data tersebut diawali karakter “@” dan diakhiri dengan karakter “$”.
Untuk memeriksa paket data yang dikirimkan benar atau salah, central unit memeriksa jumlah data yang diterima dan mememeriksa karakter pertama dan terakhir. Jika paket data yang diterima berjumlah 46 karakter, diawali dengan karakter “@” dan diakhiri dengan karakter “$”, maka paket data dianggap benar. Jika paket data yang diterima benar, central unit mengirimkan karakter “y” ke remote unit untuk memberikan kode pengiriman paket data berhasil, tetapi apabila central unit tidak mengirimkan karakter “y” setelah menerima paket data, remote unit akan menganggap pengiriman paket data gagal sehingga data yang dikirimkan di simpan dan akan dikirimkan kembali setelah jadwal pengiriman selanjutnya.
3.2.2. Diagram Alir Program Mikro
Gambar 3.7. Gambar Diagram Alir Program Mikro.
3.2.3. Pengaturan Frekuensi Kerja RFM12
Pengaturan frekuensi kerja RFM12 (baik pancar maupun terima) menggunakan perintah “Frequency Setting Command”. Instruksi ini memiliki format :
Tabel 3.1. Format Pengaturan Frekuensi [13]
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
Data 1 0 1 0 F, menyatakan frekuensi
Nilai F ditentukan melalui persamaan [13]:
MHz (3.1)
Nilai F yang didapat dirubah ke dalam bentuk heksadesimal menjadi:
Nilai heksadesimal yang didapat dimasukkan ke dalam register “Frequency Setting Command” untuk mengatur frekuensi yang digunakan.
3.2.4. Prosedur Pengiriman Data dengan RFM12
Prosedur pengiriman data melibatkan instruksi “Power Management Command” dan “Transmitter Register Write Command”. “Power Management Command” berfungsi menghidupkan dan mematikan komponen – komponen pemancar RF pada RFM12. ”Transmitter Register Write Command” berfungsi mengirimkan satu byte data ke register data pemancar pada RFM12.
Prosedur pengiriman data dimulai dengan menghidupkan bagian pemancar menggunakan instruksi “Power Management Command” dengan nilai 0x8238. Instruksi dengan nilai tersebut akan menghidupkan penguat daya RF (Radio Frequency), dan osilator. Selanjutnya, lima paket data pembuka dikirim secara urut sesuai datasheet :
0xB8AA, 0xB8AA, 0xB8AA, 0xB82D dan 0xB8D4. Kemudian satu byte data dikirim menggunakan perintah “Transmitter Register Write Command” yaitu dengan melakukan operasi OR antara bilangan heksadesimal 0xB800 dengan data yang bersangkutan.
Langkah ini dapat diulangi jika data yang dikirim berjumlah lebih dari satu byte. Jika data sudah dikirim semuanya, prosedur ditutup dengan mematikan pemancar menggunakan perintah 'Power Management Command' dengan nilai 0x8208. Instruksi dengan nilai tersebut akan mematikan penguat daya RF, dan osilator.
Gambar 3.8. Diagram Alir Pengiriman Data RFM12
3.2.5. Prosedur Penerimaan Data dengan RFM12
Prosedur penerimaan data melibatkan tiga instruksi. “Power Management
Command” berfungsi menghidupkan dan mematikan komponen – komponen penerima RF
dari RFM12. “FIFO dan Reset Mode Command' berfungsi mengatur pemakaian register data FIFO. “Receiver FIFO Read Command” berfungsi menerima satu byte data yang ditampung pada register FIFO.
Prosedur penerimaan data dimulai dengan menghidupkan komponen – komponen penerima meliputi RF, baseband, dan osilator. Hal ini dilakukan menggunakan instruksi 'Power Management Command' dengan nilai 0x82C8. Mode FIFO diatur dan FIFO diaktifkan menggunakan perintah 'FIFO and Reset Mode Command' dengan nilai 0xCA81 dan 0xCA83. Pengambilan data dilakukan pada register FIFO menggunakan instruksi “Receiver FIFO Read Command”. Hal ini dilakukan dengan mengirimkan nilai 0xB000 dan menampung data kembalian dari RFM12.
Gambar 3.9. Diagram Alir Penerimaan Data RFM12
3.2.6. Format Paket Data
Jumlah karakter di dalam paket data sebanyak 46 karakter, karakter tersebut terdiri dari nomor penyimpanan, tanggal, jam, penggabungan 4 data sensor, dan status dari sistem pengendali. Format data tersebut disesuaikan dengan kebutuhan dan sesuai dengan yang dibutuhkan oleh remote unit, berikut format data di dalam paket data:
@01#dd-MM-yyyy#HH:mm#Saaaa#Kbbbb#Hcccc#Ddddd#$ Dari format paket data tersebut bisa dijelaskan pada tabel 3.2 seperti berikut:
Tabel 3.2. Format Paket Data Nomor
penyimpanan Tanggal Waktu Suhu Keasaman Kekeruhan DO
Jumlah
karakter 2 10 5 5 5 5 5
3.2.7. Diagram Alir Proses Serial Peripheral Interface (SPI)
Diagram alir program ditunjukkakan pada gambar 3.10. Pengiriman pemancar menggunakan proses SPI yang membutuhkan pergeseran. Dimana satu data terdiri dari 16 bit sehingga tiap satu data menghasilkan 16 clock. Setiap data yang masuk akan dimaksukkan terlebih dahulu ke variabel “writeCmd”. Cmd merupakan tempat untuk penyimpanan data. Terlebih dahulu pemancar diaktifkan kemudian clock diatur low (clock
cmd pertama tidak ada data maka clock diatur = 0, kirim data, kemudian geser data ke kiri 1 kali. Langkah ini terjadi hingga counter melewati 16 kali maka proses akan selesai jika,
Namun jika isi cmd pertama ada data maka clock diatur = 0, simpan data ke cmd, geser data cmd ke kiri 1 kali, kemudian clock kembali diatur = 0. Proses ini akan selesai sampai tidak adanya data yang diterima.
Gambar 3.10. Diagram Alir Proses SPI
3.2.8. Tampilan data pada PC
diterima. Tampilan grafik dapat ditampilkan dalam bentuk diagram batang dan diagram
[image:49.595.84.525.146.728.2]plot dalam bentuk 2D dan 3D. Tampilan ini akan mempermudah dalam melihat data semua sensor yang mengukur kualitas kolam air ikan
Gambar 3.11. Tampilan 2D Diagram Batang Pengukuran Kualitas Air Kolam Ikan
32
HASIL DAN PEMBAHASAN
Bab ini berisi gambar fisik hardware yang dibuat, pembahasan tentang pembagian hardware, hasil pengujian rangkaian, hasil data yang diterima, pembahasan tentang program visual basic yang menampilkan grafik dan program mikrokontroler. Data yang akan dibahas terdiri dari data data sensor dan paket data ke yang diterima oleh cental unit. Data yang diterima kemudian ditampilkan dalam bentuk tabel dan grafik di visual basic. Hasil pengujian berupa data-data yang diperoleh dapat memperlihatkan bahwa hardware atau software yang dirancang telah bekerja dengan baik atau tidak. Berdasarkan data-data tersebut dapat dilakukan analisis terhadap proses kerja alat yang kemudian dapat digunakan untuk menarik kesimpulan akhir
4.1.
Bentuk Fisik Central Unit dan Hardware Elektronik
4.1.1. Bentuk Fisik Central Unit
[image:51.595.85.528.276.680.2]Bentuk fisik remote unit secara keseluruhan ditunjukkan pada gambar 4.1 sampai
gambar 4.3. Bentuk fisik remote unit ini terdiri dari 1 box yang bertujuan untuk melindungi dan merapikan rangkaian elektronik di dalamnya.
Gambar 4.2. Kotak Sistem Tampak Samping
Gambar 4.3. Kotak Sistem Tampak Belakan
4.1.2. Subsistem Elektonik Alat
Gambar 4.4. Rangkaian Sistem Mikrokontroler dan LCD karakter
Gambar 4.6. Rangkaian USB to TTL
4.2.
Pengujian Alat
4.2.1. Pengujian Komunikasi RFM12-433S 1 Arah
Pengujian komunikasi RFM12-433S 1 arah dilakukan untuk mengetahui jarak maksimum dari modul pemancar tersebut. Pengujian dilakukan pada ruang terbuka dengan cara mengirimkan 1 karakter “O” secara terus menerus dari pemancar ke penerima, apabila penerima dapat menerima karakter tersebut, penerima akan menampilkan tulisan “Koneksi OK”, tetapi apabila karakter tersebut “O” tidak diterima maka pada LCD penerima akan menampilkan karakter “Koneksi Gagal”. Pada pengujian ini dilakukan dengan 3 frekuensi berbeda dan 3 kecepatan transfer data yang berbeda. Frekuensi yang digunakan untuk pengujian ini adalah 432MHz, 435MHz, dan 437MHz, sedangkan kecepatan transfer data yang digunakan adalah 1kbps, 2kbps, dan 5kbps. Hasil pengujian komunikasi RFM12-433S 1 arah ditampilkan pada dan tabel 4.1.
Berdasarkan tabel 4.1, frekuensi yang digunakan pada 432MHz mampu mencapai jarak maksimum pengiriman 1 byte sejauh 120 meter, sedangkan untuk frekuensi 435MHz jarak terjauh sebesar 120 meter dan untuk frekuensi 437MHz jarah terjauh untuk pengiriman 1 byte sebesar 122 meter. Berdasarkan tabel 4.2, jarak terjauh dapat dicapai dengan menggunakan baudrate terkecil yaitu sebesar 1kbps, sedangkan untuk baudrate terbesar yaitu sebesar 5kbps hanya mencapai jarak paling pendek.
Hal tersebut dikarenakan semakin besar baudrate yang digunakan atau semakin
No. Frekuensi (MHz)
Kecepatan (kbps)
Jarak maksimum
(m)
1 432 1 122
2 432 2 120
3 432 5 118
4 435 1 120
5 435 2 115
6 435 5 110
7 437 1 122
8 437 2 119
9 437 5 118
Berikut gambar pengaruh baudrate dengan sinyal yang diterima ditampilkan pada gambar 4.7 – 4.9 dengan jarak pengiriman sejauh 40 meter, sedangkan pengaruh jarak pengiriman data dengan sinyal yang diterima ditampilkan pada gambar 4.10 - 4.13 yang menggukan pengaturan frekuensi 432MHz dan baudrate 5kbps.
[image:55.595.84.523.65.672.2]Gambar 4.8. Sinyal Diterima Central Unit Untuk Pengiriman 1 Byte dengan Baudrate
[image:56.595.86.512.249.733.2]2kbps
Gambar 4.9. Sinyal Diterima Central Unit Untuk Pengiriman 1 Byte dengan Baudrate 5kbps
Gambar 4.11. Sinyal Diterima Central Unit Dengan Jarak Pengujian 10 Meter
Gambar 4.12. Sinyal Diterima Central Unit Dengan Jarak Pengujian 20 Meter
Untuk memeriksa data yang diterima sudah sesuai dengan data yang dikirim dapat dilakukan dengan mengecek sinyal data yang diterima dan clock yang dihasilkan dari
sistem penerima, tetapi untuk pengambilan data sangat sulit untuk mensinkronkan antara sinyal data yang diterima dengan clock yang dihasilkan, karena clock akan bergeser ke kiri atau ke kanan.
[image:58.595.85.522.223.580.2]Dalam pengambilan data ini, penulis mengambil data secara terpisah. Pertama mengambil data sinyal yang diterima kemudian mengambil data clock yang dihasilkan. Setelah kedua data tersebut diambil, maka penulis menyatukan kedua gambar tersebut agar sinkron sehingga tampak seperti gambar 4.14. Dari gambar 4.14, bisa diambil nilai bit yang diditerima setiap perubahan clock naik, sehingga didapat hasilnya adalah 1011100010101010b. Kemudian dari nilai tersebut dikonversikan menjadi bilangan heksa dan didapat hasilnya adalah 0xB8AA. Nilai tersebut sesuai dengan yang dikirimkan dari remote unit. Nilai “B8” merupakan alamat untuk pengiriman data, dan nilai “AA” merupakan nilai inisialisasi sebelum atau sesudah mengirim data.
Gambar 4.14. Cara Membaca Sinyal Yang Diterima 4.2.2. Pengujian Komunikasi RFM12-433S 2 Arah Secara Bergantian
sedangkan kecepatan transfer data yang digunakan adalah 1kbps, 2kbps, dan 5kbps. Hasil
[image:59.595.84.514.186.568.2]pengujian komunikasi RFM12-433S 2 arah bergantian ditampilkan pada dan tabel 4.2. Berdasarkan tabel 4.3, jarak terjauh yang mampu ditempuh sebesar 30 meter dengan pengaturan frekuensi sebesar 435MHz dan kecepatan transfer sebesar 5kbps. Dari tabel 4.2 apabila dibandingkan dengan tebel 4.1, hasil yang didapatkan berbeda jauh. Hal ini disebabkan karena untuk komunikasi 2 arah secara bergantian dibutuhkan komunikasi yang stabil, dan kestabilan dari modul RFM12-433S ini berada pada jangkauan maksimum sebesar 30 meter.
Tabel 4.2. Hasil Pengujian Pengujian RFM12-433S 2 Arah Bergantian
No. Frekuensi (MHz) Kecepatan (kbps) Jarak maksimum (m)
1 432 1 30
2 432 2 22,6
3 432 5 20
4 435 1 23,1
5 435 2 24
6 435 5 15
7 437 1 24,5
8 437 2 28
9 437 5 23,8
4.2.3. Pengujian Penerimaan Paket Data ke Remote Unit
Pengujian pengiriman paket data ke central unit dilakukkan untuk mengetahui peforma dari pemancar yang digunakan untuk mengetahui frekuensi dan kecepatan transfer data dengan jarak terjauh dan dapat diterima dengan benar oleh central unit untuk pengiriman paket data. Pengujian dilakukan di tempat terbuka setiap 5 meter yaitu pada jarak 1 meter, 5 meter, 10 meter dan 15 meter.
Metode pengujian adalah dengan cara menjalankan program utama dan megatur jadwal pengiriman paket data setiap 1 menit, sehingga setiap 1 menit alat ini akan
adalah 1kbps, 2kbps, dan 5kbps. Hasil pengujian paket data ke central unit ditampilkan pada dan tabel 4.3.
Tabel 4.3. Hasil Pengujian Pengiriman Paket Data
Frekuensi 432MHz 432MHz 432MHz
Baudrate 1kbps 2kbps 5kbps
Jarak (m) Keterangan Keterangan Keterangan
1 berhasil berhasil berhasil
5 berhasil berhasil berhasil
10 berhasil berhasil berhasil 15 berhasil berhasil berhasil
Frekuensi 435MHz 435MHz 435MHz
Baudrate 1kbps 2kbps 5kbps
Jarak (m) Keterangan Keterangan Keterangan
1 berhasil berhasil berhasil
5 berhasil berhasil berhasil
10 berhasil berhasil berhasil 15 berhasil berhasil berhasil
Frekuensi 437MHz 437MHz 437MHz
Baudrate 1kbps 2kbps 5kbps
Jarak (m) Keterangan Keterangan Keterangan
1 berhasil berhasil berhasil
5 berhasil berhasil berhasil
10 berhasil berhasil berhasil 15 berhasil berhasil berhasil
Berdasarkan tabel 4.3, semua data yang dikirim remote unit berhasil diterima
central unit. Walaupun semakin besar baudrate yang digunakan noise yang dihasilkan semakin besar, tetapi untuk jarak 15 meter noise tersebut belum mengganggu proses pengiriman paket data. Berdasarkan hal tersebut, membuktikan bahwa modul
RFM12-433S bisa digunakan untuk proses pengiriman 1 byte atau lebih.
Gambar 4.15. Sinyal Penerimaan Paket Data Dengan Baudrate 1kbps
Gambar 4.16. Sinyal Penerimaan Paket Data Dengan Baudrate 2kbps
Clock yang dihasilkan penerima
Sinyal data yang dikirim
Dari hasil pengujian ini, semakin besar baudrate yang digunakan maka semakin besar juga noise yang dihasilkan. Tetapi pada pengujian ini jarak terjauh untuk pengujian
paket data sebesar 15 meter. Pada jarak tersebut, noise yang diterima pada central unit tidak mempengaruhi proses pengiriman paket data karena semua data masih bisa diterima walaupun noise tersebut cukup besar.
4.2.4. Tampilan Visual Pengguna
[image:62.595.84.528.252.672.2]Pada tampilan pengguna terjadi perubahan tampilan dengan perancangan yang ada pada BAB III. Pada tampilan, penulis menambahkan status sistem kendali untuk menampilkan inlet, outlet dan pompa dalam kondisi tertutup atau terbuka, serta menampilkan status dalam kondisi normal atau tidak normal. Tampilan grafik dapat lebih mudah diamati untuk masing-masing tiap sensor. Perubahan tampilan ini dikarenakan untuk menyesuaikan tampilan agar pengguna dapat lebih mudah dalam mengamati dan menggunakannya. Berikut tampilan pada Visual Basic ditunjukkan pada gambar 4.18, dan data yang disimpan dalam database ditampilkan pada gambar 4.19.
Gambar 4. 19. Tampilan data tersimpan dalam database
Dari tampilan tersebut dapat dilihat terjadi penambahan beberapa form tambahan seperti jumlah data, data status, pemilihan port, dan status sistem kendali. Jumlah data
merupakan jumlah data yang tersimpan yang ada di database, penambahan form tersebut untuk mempermudah minghitung jumlah data dalam membuatat grafik. Penambahan
pemilihan port agar pengguna bisa menggunakan tidak hanya di 1 tempat port saja, tetapi bisa memilih port pada komputer / laptop lainnya yang tidak digunakan.
Data status merupakan status dari sistem kendali pada kondisi terakhir. Penambahan form data status dimaksudkan agar pengguna juga dapat memonitoring status sistem kendali pada kondisi terakhir. Penambahan form ini juga membuat penamb
![Gambar 2.7. Bentuk fisik LCD 16x2 [10]](https://thumb-ap.123doks.com/thumbv2/123dok/917046.599088/30.595.83.518.252.754/gambar-bentuk-fisik-lcd-x.webp)
![Gambar 2.8. Bentuk fisik USB to TTL[14].](https://thumb-ap.123doks.com/thumbv2/123dok/917046.599088/31.595.85.517.197.632/gambar-bentuk-fisik-usb-to-ttl.webp)
![Gambar 2.9. Konfigurasi Pin RFM12-433S [12]](https://thumb-ap.123doks.com/thumbv2/123dok/917046.599088/32.595.85.509.74.607/gambar-konfigurasi-pin-rfm-s.webp)
![tabel tersebut juga ditentukan aksi pengendalian berdasarkan standar yang ditentukan [13];](https://thumb-ap.123doks.com/thumbv2/123dok/917046.599088/37.595.81.530.194.570/tabel-ditentukan-aksi-pengendalian-berdasarkan-standar-ditentukan.webp)