SISTEM TRACKING ROBOT PADA RULE TERBATAS
MENGGUNAKAN GPS TRACKER BERBASIS ANDROID
Dhesi Wardhani1) Eni Dwi Wardihani1) Amin Suharjono1)
1
Jurusan Elektro Politeknik Negeri Semarang
Jalan Prof. H. Soedarto, S.H. Tembalang, Semarang 50275 E-mail : [email protected], [email protected],
3
Abstract
The robot is a mechanical device that can perform physical tasks, using either human supervision and control, or using artificial intelligence. Robot has an edge in the job that is used for heavy duty, dangerous, repetitive and dirty jobs. Fire fighting robot, if implemented for extinguishing forest fires, control and tracking systems necessary to position the robot can be known. The aim of this tracking system to monitor the movement of the object. One way to build this robot tracking system by adding GPS and Android applications to monitor and control the robot. GPS is used to locate the latitude and longitude coordinates robot. While Android is used to show the position of the robot in the form of a map. The robot moves based on Android with media controls data transmission using blue tooth. Distance range blue tooth calculated theoretically is 10.53 m, but in practice reached 13.25 m. Changes in latitude longitude values occur every movement of at least 2.85 m. The test results show the system can be controlled by Android robot via Bluetooth and application of maps to show the position of the robot in the form of a map.
Keywords: robot, GPS, tracking, Android, bluetooth
Abstrak
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan kecerdasan buatan. Robot memiliki kelebihan dalam pekerjaan yaitu digunakan untuk tugas yang berat, berbahaya, pekerjaan berulang dan kotor. Robot pemadam api, apabila diimplementasikan untuk pemadam kebakaran hutan, perlu sistem kontrol dan tracking agar posisi robot dapat diketahui. Sistem tracking ini bertujuan untuk memantau pergerakan objek. Salah satu cara untuk membangun sistem tracking robot yaitu dengan menambahkan GPS dan aplikasi Android untuk memantau dan mengontrol Robot. GPS digunakan untuk mengetahui letak koordinat latitude dan longitude robot. Sedangkan aplikasi Android digunakan untuk menampilkan posisi robot dalam bentuk peta. Robot bergerak berdasarkan kontrol Android dengan media pengiriman data menggunakan bluetooth. Jarak jangkauan bluetooth dihitung secara teori yaitu 10,53 m , namun pada praktik mencapai 13,25 m. Perubahan nilai latitude longitude terjadi setiap pergerakan minimal 2,85 m. Hasil pengujian sistem menunjukkan robot dapat dikontrol dengan Android melalui bluetooth dan aplikasi maps dapat menampilkan posisi robot dalam bentuk peta.
Kata kunci : robot, GPS, tracking, Android, bluetooth.
PENDAHULUAN
dapat meringankan beban pekerjaan. Salah satu caranya dengan adanya pemakaian robot. Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu atau kecerdasan buatan. Robot memiliki kelebihan dalam pekerjaan yang biasanya digunakan untuk tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor.
Semakin pesatnya penelitian mengenai robot sebagai alat bantu untuk meringankan pekerjaan manusia, maka direktorat jenderal perguruan tinggi mengadakan Kontes Robot Nasional dengan salah satu tema yang diangkat adalah robot SAR pemadam api. Dimana prototipe robot yang dibuat dapat memadamkan api yang dianalogikan seperti kebakaran. Maka penelitian yang berjudul “Sistem Tracking Robot pada Rule Terbatas menggunakan GPS Tracker Berbasis Android” mengadopsi dari tema perlombaan yang diselenggarakan oleh direktorat jenderal perguruan tinggi. Tema tersebut oleh penulis dikembangkan dengan menambah modul GPS untuk memantau pergerakan robot, sehingga apabila robot tersebut benar-benar diimplementasikan secara nyata untuk pemadaman api di luar gedung dapat dipantau pergerakannya.
Teknologi GPS atau Global Positioning System telah berkembang dengan pesat yang banyak digunakan masyarakat sebagai penunjuk jalan atau arah ketika bepergian ke suatu tempat yang mana dapat menampilkan posisi device atau pengguna secara akurat asalkan terjangkau oleh satelit. GPS sendiri berfungsi untuk menunjukkan jalan atau arah bagi pengguna, kemudian perkembangan dari GPS yaitu antara lain adalah GPS Tracker yang berfungsi untuk menunjukkan posisi sebuah objek bergerak dari lokasi yang berbeda secara real-time. GPS Tracking memanfaatkan gabungan dari teknologi GSM atau Global System for Mobile Communication dan GPS untuk menentukan koordinat posisi sebuah obyek, lalu posisi tersebut dapat dilihat pada peta digital (Hastaman, Yulianto, dan Widiyanto, 2013).
Data dari GPS tersebut akan ditampilkan pada display Android yang bertujuan untuk menambahkan fungsi baru pada robot yang akan memudahkan operator dalam memantau pergerakan robot. Android merupakan sistem operasi berbasis Linux yang dirancang untuk perangkat bergerak layar sentuh seperti telepon pintar dan komputer tablet. Android merupakan teknologi yang telah dikenal masyarakat luas yang sering digunakan sehari-hari.
METODE PENELITIAN
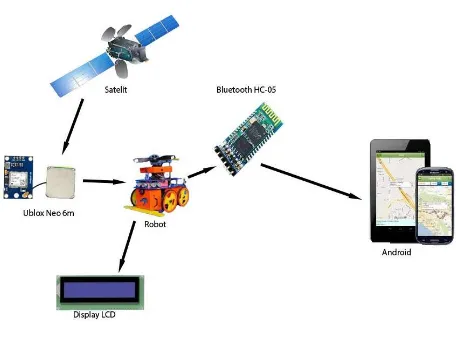
Gambar 1. Gambaran Umum Sistem
Sistem tracking robot ini terdapat empat bagian utama, yaitu robot, modul GPS, bluetooth, dan aplikasi Android yang akan digunakan oleh operator untuk mentracking robot.
1. Robot
Pada sistem ini robot berfungsi sebagai objek yang akan ditracking keberadaannya. Robot dapat bergerak dan menjalankan fungsinya berdasarkan kontrol Android. Robot ini terdiri dari susunan rangkaian elektronika yang dihubungkan menjadi satu kesatuan dan telah diprogram sesuai tujuan, sehingga robot dapat berjalan sesuai perintah.
2. GPS
GPS (Global Positioning System) adalah sistem satelit navigasi dan penentuan posisi menggunakan satelit. Nama formal dari GPS adalah NAVSTAR GPS, kependekan dari
“Navigation Satellite Timing and Ranging Global Positioning System”. Sistem yang dapat digunakan oleh banyak orang sekaligus dalam segala cuaca ini, didesain untuk memberikan posisi dan kecepatan tiga dimensi yang teliti, dan juga informasi mengenai waktu, secara kontinyu di seluruh dunia (Abidin, 2006).
GPS dapat menentukan posisi sebuah objek, dengan melakukan perhitungan seecar matematis seperti berikut :
S12 = x2 - 2x1x + x12 + y2– 2y1y + y12 (1) S22 = x2 - 2x2x + x22 + y2– 2y2y + y22 (2) S32 = x2 - 2x3x + x32 + y2– 2y3y + y12 (3)
Dari ketiga persaamaan tersebut akan menjadi:
2(x2 – x1)x + 2(y2 – y1)y = S12 - S22– x12 + x22– y12 + y22 2(x3 – x2)x + 2(y3 – y2)y = S22 – S32 – x22
+ x32 – y22 + y32
Kemudian dimisalkan dengan persamaan :
ax + by = e (4)
cx + dy = f (5)
b = 2(y2 – y1) c = 2(x3 – x2) d = 2(y3 – y2)
e = S12 - S22 – x12 + x22 – y12 + y22 f = S22– S32– x22 + x32– y22 + y32
Kemudian untuk menentukan posisi objek yang sesungguhnya :
3. Bluetooth
Bluetooth adalah sebuah teknologi wireless yang mampu menyediakan layanan komunikasi data dan suara dengan jarak jangkauan yang terbatas. Bluetooth adalah sebuah teknologi komunikasi wireless (tanpa kabel) yang beroperasi dalam pita frekuensi 2,4 GHz unlicensed ISM (Industrial, Scientific and Medical) dengan menggunakan sebuah frekuensi hopping tranceiver yang mampu menyediakan layanan komunikasi data dan suara secara real-time antara host-host bluetooth dengan jarak jangkauan layanan yang terbatas (Anharku, 2009). Bluetooth digunakan sebagai media komunikasi antara mikrokontroler pada robot dengan Android, sehingga antara robot dan Android dapat terkoneksi.
4. Android
Android adalah sistem operasi untuk telepon seluler yang berbasis Linux. Android menyediakan platform yang bersifat open source bagi para pengembang untuk menciptakan sebuah aplikasi. Awalnya, Google Inc. mengakuisi Android Inc. yang mengembangkan software untuk ponsel yang berada di Palo Alto, California, Amerika Serikat (Nazruddin, 2012). Android digunakan sebagai aplikasi untuk mengontrol pergerakan robot dan mentracking pergerakan robot. Aplikasi Android ini menerima data dari GPS yang dikirim melalui bluetooth yang datanya berupa latitude dan longitude.
Cara kerja sistem tracking tersebut adalah robot yang telah diberi mikrokontroler Arduino dihubungkan dengan modul GPS dan bluetooth. Modul GPS tersebut yang akan membaca letak koordinat keberadaan robot yang berupa data latitude dan longitude. Data latitude dan longitude akan dikirim ke Android melalui bluetooth, dan dikirim ke display LCD 16x2. Data tesebut dikirim ke LCD.
Selain untuk mengirim informasi latitude dan longitude, bluetooth juga berfungsi untuk media penghubung kontrol Android dengan robot sehingga pergerakan robot dapat dikontrol melalui Android. Robot dapat berjalan dan melakukan fungsinya hanya berdasarkan perintah yang diinputkan dari Android, seperti perintah jalan maju, mundur, belok kanan, belok kiri, dan berhenti.
yang berfungsi hanya operator saja yang dapat menggunakan aplikasi tersebut sehingga tidak semua orang dapat mentracking robot tersebut. Aplikasi Android ini juga dapat menampilkan peta seperti aplikasi Google Maps sehingga memudahkan dalam mengetahui posisi robot.
Tahap ketiga yaitu pembuatan sistem. Pembuatan sistem ini terdiri dari pembuatan hardware dan software.
1. Pembuatan Hardware
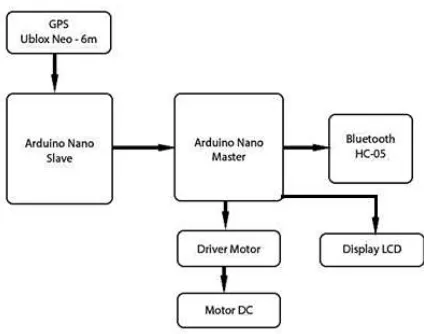
Pembuatan hardware meliputi pembuatan layout PCB untuk GPS, Arduino, driver motor, LCD 16x2, dan bluetooth. Blok diagram hardware dapat dilihat pada Gambar 2.
Gambar 2. Diagram Blok Prototipe Robot
2. Pembuatan Software
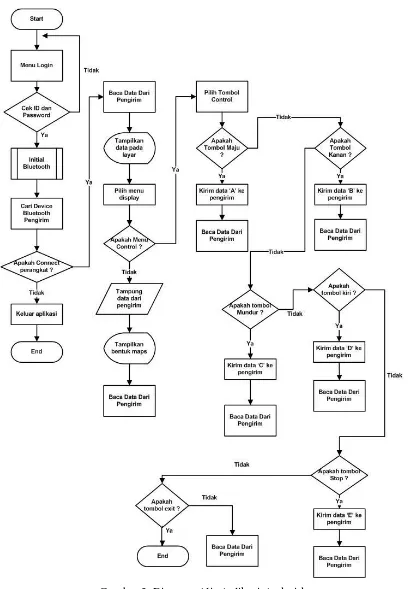
Software yang digunakan dalam pembuatan sistem tracking ini adalah Android Studio, Arduino, dan Eagle. Dalam pembuatan sistem tracking robot ini, software yang dibuat adalah aplikasi Android, karena seluruh kegiatan robot dikendalikan dan dipantau melalui Android. Aplikasi Android ini juga dapat mentracking pergerakan robot dengan menampilkan posisi robot pada peta seperti aplikasi Google Maps, sehingga operator dapat mengetahui dengan jelas keberadaan robot. Untuk lebih jelas mengenai aplikasi Android ini dapat dilihat pada diagram alir aplikasi Android pada Gambar 3.
Perancangan aplikasi Android ini terbagi menjadi dua yaitu aplikasi Android untuk kontrol robot dan aplikasi Android untuk maps. Perancangan layout pada sistem tracking robot ini dibagi menjadi tiga bagian utama yaitu :
a. Perancangan menu login.
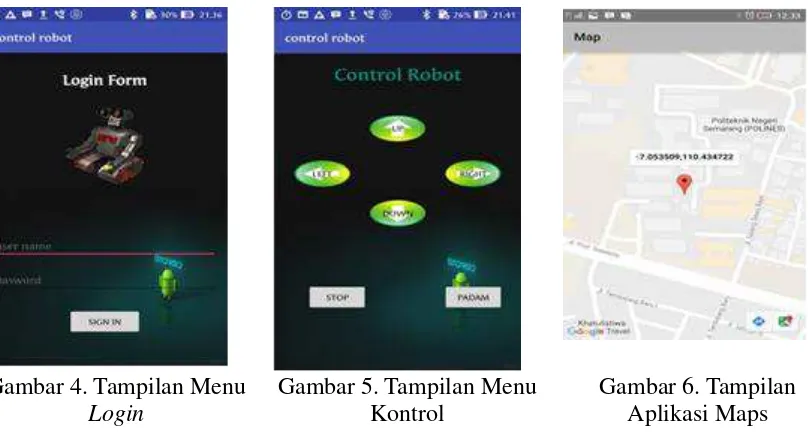
Menu login dalam sistem ini berfungsi untuk menjaga kerahasian identitas operator. Karena apabila username dan password tidak sesuai maka aplikasi tersebut tidak akan menampilkan menu selanjutnya. Layout dari menu login dapat dilihat pada Gambar 4. b. Perancangan menu kontrol
Menu kontrol berisi tombol maju, mundur, belok kanan, belok, kiri, dan berhenti, untuk mengoperasikan robot. Menu utama ini dapat berfungsi apabila koneksi dengan perangkat bluetooth berjalan dengan baik. Layout menu utama dapat dilihat pada Gambar 5.
Pada aplikasi maps ini, menampilkan peta dan dapat menunjukkan titik keberadaan robot di peta. Aplikasi maps dapat menampilkan peta, berasal dari inputan nilai longitude dan latitude kemudian ditampilkan dalam bentuk peta. Tampilan maps dapat dilihat pada Gambar 6.
Gambar 4. Tampilan Menu Login
Gambar 5. Tampilan Menu Kontrol
Gambar 6. Tampilan Aplikasi Maps
HASIL DAN PEMBAHASAN
Pengujian sistem yang dilakukan meliputi pengujian hardware dan software. Pengujian hardware yaitu menguji prototipe robot dan komponen penyusun robot, sedangkan pegujian software yaitu menguji aplikasi Android. Pengujian dilakukan, untuk mengetahui bahwa sistem telah berjalan sesuai dengan yang diharapkan dan dapat melakukan fungsinya.
1. Pengujian Hardware.
Pada pengujian hardware meliputi pengujian GPS, bluetooth, dan robot. a. Pengujian modul GPS
Pengujian GPS yaitu menguji modul GPS yang diletakkan pada badan robot dapat mendeteksi posisi robot berupa koordinat atau tidak, dimana koordinat tersebut ditampilkan pada LCD 16x2 dan aplikasi Android. Hasil pengujian GPS dapat dilihat pada Gambar 7 dan 8.
Namun apabila GPS belum dapat membaca koordinat posisi robot, maka latitude dan longitude yang akan ditampilkan pada LCD dan aplikasi Android adalah 0.000000, seperti yang ditunjukkan pada Gambar 9 dan 10.
Gambar 7. Hasil Pengujian GPS di LCD
Gambar 9. Tampilan LCD Saat GPS Tidak Bekerja
Gambar 10. Tampilan Android Saat GPS Tidak Bekerja
GPS yang digunakan dalam sistem ini adalah GPS ublox neo6mv2 yang mana perubahan data koordinat dapat terjadi setelah bergerak minimal 2,85 m. Untuk hasil pengujian perubahan nilai latitude dan longitude dapat dilihat pada Tabel 1.
Tabel 1. Pengujian Perubahan Latitude dan Longitude No Perpindahan
Robot (m)
Nilai Latitude Longitude
1 2 Tidak berubah
2 2,5 Tidak berubah
3 2,85 Berubah
4 3,5 Berubah
5 5 Berubah
6 10 Berubah
b. Pengujian Bluetooth.
Pengujian bluetooth yaitu menguji koneksi perangkat bluetooth Android dan robot. Apabila bluetooth pada robot dan Android tidak terkoneksi maka robot tidak dapat berjalan. Hasil uji konektifitas perangkat bluetooth ditunjukkan pada Gambar 11.
Gambar 11. Uji Konektifitas Perangkat Bluetooth
Gambar 12. Perangkat Bluetooth Tidak
Apabila berhasil tersambung maka akan muncul menu selanjutnya. Namun apabila tidak tersambung maka akan muncul peringatan “Connection Failure” seperti ditunjukkan pada Gambar 12.
Jarak jangkauan bluetooth untuk dapat mengontrol robot dalam keadaan tidak terhalang apapun adalah 13,25 m. Hasil pengujian jarak jangkauan bluetooth dapat dilihat pada Tabel 2.
Tabel 2 Pengujian Jangkauan Bluetooth No Jarak (m) Hasil Konektifitas
Bluetooth
Secara teori, bluetooth kelas 2 dengan daya pancar 4 dBm mempunyai jarak jangkauan 10 m, hal tersebut dapat dihitung secara matematis sebagai berikut :
Spesifikasi bluetooth :
Dari hasil praktik menyatakan jarak jangkuan terjauh adalah 13,25 m, dan secara teori menyatakan jarak jangkuan terjauh adalah 10,53 m. Perbedaan tersebut dapat terjadi karena faktor posisi pengambilan data, ketinggian bluetooth saat pengambilan data, sehingga tedapat selisih 2,72 m antara praktik dan teori.
c. Pengujian robot
Pengujian robot dalam hal ini menguji seluruh blok rangkaian penyusun robot sehingga robot dapat menjalankan fungsinya.
2. Pengujian Software
Pengujian software meliputi pengujian aplikasi Android yaitu menu login, menu utama, dan aplikasi maps.
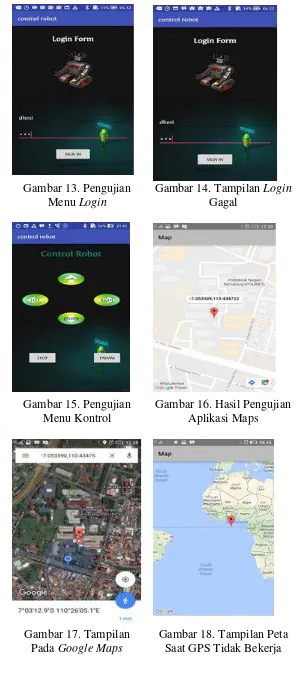
Pengujian menu login yaitu menguji kesesuaian username dan password yang dimasukkan dengan yang telah diinisialisasikan dalam program. Menu login ini berfungsi sebagai pengaman, sehingga hanya orang tertentu saja yang dapat mengoperasikan robot tersebut. Untuk hasil pengujian menu login dapat dilihat pada Gambar 13.
Apabila username dan password benar maka akan ada notifikasi “login success”, dan menampilkan menu selanjutnya. Namun apabila username dan password salah, maka akan ada notifikasi “login gagal”. Hasil pengujian yang menunjukkan username dan password yang salah dapat dilihat pada Gambar 14.
b. Pengujian Menu Kontrol
Pengujian menu kontrol sama dengan menguji sistem kontrol robot, karena pada menu utama berisi tombol-tombol untuk mengontrol pergerakan robot seperti maju, mundur, belok, berhenti, dan menggerakkan kipas. Namun sebelum menuju ke menu kontrol, hal yang harus dilakukan adalah menyambungkan bluetooth robot dengan Android sehingga menu kontrol dapat berfungsi. Untuk hasil pengujian menu kontrol dapat dilihat pada Gambar 15.
Apabila sudah muncul seperti pada Gambar 15 maka menu kontrol berhasil dijalankan, karena apabila menu utama gagal dijalankan berarti pada saat melakukan penyambungan perangkat bluetooth gagal. Pada saat penyambungan perangkat bluetooth gagal, maka aplikasi tidak akan menampilkan menu kontrol dan akan tetap berada pada tampilan “Search Device”.
c. Pengujian Aplikasi Maps
Pengujian maps yaitu menguji aplikasi maps pada Android untuk menampilkan posisi robot dalam peta, koordinat yang telah dideteksi oleh GPS dapat ditampilkan dalam bentuk peta. Aplikasi maps dapat dijalankan apabila HP Android dalam keadaan online atau terkoneksi dengan internet. Aplikasi maps dapat menampilkan posisi robot dalam peta, berasal dari data koordinat yang dikirimkan melalui bluetooth yang kemudian data koordinat tersebut diolah untuk ditampilkan dalam bentuk peta.
Dalam pengujian aplikasi maps ini dilakukan perbandingan antara posisi yang ditampilkan pada aplikasi maps dengan posisi yang ditampilkan pada aplikasi Google Maps. Dengan koordinat yang sama, apabila hasil penunjukan posisi juga sama, maka aplikasi maps dikatakan sudah dapat berfungsi. Hasil pengujian, dapat dilihat pada Gambar 16 dan 17.
Gambar 13. Pengujian Menu Login
Gambar 14. Tampilan Login Gagal
Gambar 15. Pengujian Menu Kontrol
Gambar 16. Hasil Pengujian Aplikasi Maps
Gambar 17. Tampilan Pada Google Maps
SIMPULAN
Berdasarkan hasil pengujian dan pembahasan yang telah dilakukan, dapat disimpulkan bahwa :
1. Robot dan komponen penyusun robot dapat berjalan sesuai fungsi masing-masing. 2. Aplikasi Android mampu untuk menampilkan posisi robot dalam bentuk peta dan
dapat digunakan sebagai kontrol robot.
3. Perubahan nilai latitude dan longitude terjadi apabila setelah robot berjalan minimal 2,85 m, namun hal tersebut juga bergantung dengan kuat sinyal yang diterima dari satelit karena GPS dapat bekerja mengetahui posisi objek berdasarkan sinyal informasi yang diterima dari satelit.
4. Jarak jangkauan kerja bluetooth untuk dapat mengirimkan data dari Android ke mikro robot dalam keadaan tidak terhalang oleh apapun adalah 13,25 m.
DAFTAR PUSTAKA
Abidin, Z Hasanuddin. 2006. Penentuan Posisi Dengan GPS dan Aplikasinya. Jakarta: PT. Pradnya Paramitha.
Anharku. 2009. Bluetooth. http://nyoman.staf.narotama.ac.id/files/2012/ 01/Anharku-Bluetooth.pdf, (16 Juli 2016).
Hastaman, Yulianto dan Eka Puji Widiyanto. 2013. Rancang Bangun GPS Robot Tracker dan Penerapan Algoritma Proportional Integral Derivative pada Sistem Gerak Robot Beroda. STMIK GI MDP.
Nazir, Moh. 2011. Metode Penelitian. Bogor : Ghalia Indonesia.