Continuous Optimization
Linear programming system identification
Marvin D. Troutt
a,*, Suresh K. Tadisina
b,1, Changsoo Sohn
c,2,
Alan A. Brandyberry
d,3a
Department of Management and Information Systems, Kent State University, Kent, OH 44242-0001, USA b
Department of Management, Southern Illinois University, Carbondale, IL 62901-4627, USA c
Department of Business Administration, School of Business Administration, The Catholic University of Korea, San 43-1, Yokkok 2-Dong, Wonmi-Gu, Puchon City, Gyuonggi-Do 420-743, South Korea
d
Department of Management and Information Systems, Kent State University, Kent, OH 44242-0001, USA
Received 22 February 2002; accepted 30 July 2003 Available online 13 December 2003
Abstract
We define a version of the Inverse Linear Programming problem that we call Linear Programming System Iden-tification. This version of the problem seeks to identify both the objective function coefficient vector and the constraint matrix of a linear programming problem that best fits a set of observed vector pairs. One vector is that of actual decisions that we call outputs. These are regarded as approximations of optimal decision vectors. The other vector consists of the inputs or resources actually used to produce the corresponding outputs. We propose an algorithm for approximating the maximum likelihood solution. The major limitation of the method is the computation of exact volumes of convex polytopes. A numerical illustration is given for simulated data.
Ó 2003 Elsevier B.V. All rights reserved.
Keywords:Inverse optimization; Linear programming; Parameter estimation; Constraint matrix estimation; Maximum likelihood
1. Introduction
Linear programming (LP) is perhaps the most widely applicable technique in Operational Re-search. However, obtaining the parameters,
namely, the objective function coefficients and technological coefficient matrix, is typically the most difficult step of a modeling project based on LP. The method proposed here can estimate the LP objective coefficient vector and the technolog-ical coefficient matrix from time series or cross-sectional data on actual decisions and resources used. We call the actual decisions outputs and similarly, we call the resources inputs. Thus, given data on output vectors and input vectors we wish to infer the best fitting LP model.
This problem lies in the class known as inverse optimizationand can be referred to as an instance ofInverse LP. Tarantola (1987) has given a general
*Corresponding author. Tel.: 672-1145; fax: +1-330-672-2953.
E-mail addresses: [email protected] (M.D. Troutt), [email protected] (S.K. Tadisina), [email protected] (C. Sohn), [email protected] (A.A. Brandyberry).
1Tel.: +618-453-3307. 2Tel.: +8232-340-3287.
3Tel.: +330-672-1146; fax: +330-672-2953.
0377-2217/$ - see front matter Ó 2003 Elsevier B.V. All rights reserved. doi:10.1016/j.ejor.2003.07.019
account of inverse problem solving and discusses several applications, particularly in the physical sciences. Although LP is used in that work for algorithmic steps, the Inverse LP problem itself was not addressed. On the other hand, Zhang and Liu (1996), and Ahuja and Orlin (2001), respec-tively, have treated versions of the Inverse LP problem. Zhang and Liu (1996) considered inverse assignment and minimum cost flow problems. Ahuja and Orlin (2001) studied a more general LP problem and a version of the problem as follows. Given a feasible solution x0, find the minimum
perturbation of the objective function coefficients so thatx0becomes an optimal solution. Solutions
to this problem were obtained for both theL1- and
L1-norms. In this paper, we consider a version of the inverse LP problem that seeks estimates of
both the objective function vector and the con-straint matrix coefficients from a sample of ob-served resource vectors and decision vectors. We call this versionLP system identification.It may be stated formally following some notational con-ventions.
Notational conventions: Vectors and matrices are written in boldface fonts. Vectors are column vectors. The transpose of vectoryis denoted byy0. We denote bymðÞthe volume (Lebesgue measure) of a set (Æ). We abbreviate the terms, probability density function(s), as pdf(s). Similarly, we abbreviate the term, cumulative distribution function, by cdf.
We may now state the problem formally. Sup-pose that for each observation index t¼1;. . .;T
there are given data on output or decision vectors
yt, with components yt
r, r¼1;. . .;R and input
vectors, xt, with componentsxt
i,i¼1;. . .;I.
Sup-pose further that (1) there exists a nonnegative technological coefficient matrix A¼ fairg, such that Ayt6xt for all t; and (2) there exists a
non-negative objective coefficient vector p with com-ponents pr, such that the observed yt-vectors
approximate, in a sense to be defined below, optimal solutions of the linear programming problemsPt given by
Pt: max p0y;
s:t: Ayt
6xt for all
t and
yP0 componentwise:
ð1:1Þ
Letyt denote any optimal solution to problemPt.
Then the ratio
vt¼p0yt=
p0yt ð1:2Þ
is a measure of the degree to which the actual performance for observation t achieves its maxi-mum value. Such ratios are instances ofdecisional efficiencymeasures as proposed in Troutt (1995). In that paper, a method of parameter estimation called the maximum decisional efficiency (MDE) principle was proposed. This paper applies the MDE principle to solve the sub-problems of esti-matingp givenAas Avaries over a set of admis-sible choices. Following estimation of p given A, the imputed value of the ratios in (1.2) may be obtained. A pdf can then be fitted to these ratios, and a joint pdf can be constructed for the set of feasible output vectors for each linear program-ming problem Pt. From these pdfs, a likelihood score can be obtained for the observed sample. Thus, we develop a maximum likelihood approach for the joint estimation ofpandA.
The rest of the paper is organized as follows. Section 2 discusses the Maximum Decisional Effi-ciency principle and a maximin estimation model derived from it. In Section 3, a method for repre-senting the set of admissible or candidate A -matrices is proposed. Section 4 develops a joint likelihood function for the sample of output vec-tors. In terms of the above notations, this likeli-hood is a function of the data and parameters denoted by Lðy1;
. . .;yt;x1;
. . .;xtjp;AÞ. Section 5
summarizes the estimation method in pseudo-code form and provides a numerical illustration on simulated data. Section 6 provides a discussion of limitations and potential extensions, and Section 7 provides conclusions.
2. Overviews of the strategy and maximum deci-sional efficiency estimation
general MDE method, the MMA model is derived. Then the space of admissible A-matrices is con-structed in Section 3. A likelihood score is asso-ciated to eachAandp pair in Section 4 and the space of admissibleA-matrices is searched for the pair (A, p ðAÞ) with the largest likelihood. Thus, we propose a maximum likelihood procedure for the joint estimation ofp andA.
For the derivation of the MMA model below, it is useful to briefly review the MDE estimation principle in general form as discussed in Troutt (1995). Let fðx;pÞ be an objective function depending on an unknown, or perhaps imprecisely known, parameter vector,p. LetX Rn be
com-pact, and let P Rm be compact. Assume
fðx;pÞP0 for all x2X and p2P. Finally, let
x ðpÞbe any solution of max fðx;pÞ. Then define the decisional efficiency,vt, of observation, xt, by
vt¼vtðpÞ ¼fðxt;pÞ=fðx ðpÞ;pÞ: ð2:1Þ
Clearly, 06vtðpÞ61for all p2P. Thus, vtðpÞ
measures the degree of optimality of the observed decision, xt, as a function of the unknown
parameter vector,p. Since it is also the ratio of an actual return or benefit to maximum potential one, it can be regarded as an efficiency measure, hence, the termdecisional efficiency.
In the case of one observation, the MDE prin-ciple chooses the estimate of the true value ofpas thatp0 for which
vðp0Þ ¼maxvðpÞ: ð2:2Þ
To extend the notion to multiple observations, let
vðpÞbe the vector with componentsvtðpÞ. Letrbe
an aggregator function such as the sum, mean, geometric mean, minimum (Leontif), etc. Then the MDE principle estimates the true value ofpbyp0
wherep0is the parameter vector that maximizes the
aggregate decisional efficiencyrfvðpÞg. For exam-ple, if we choose summation as the aggregator, then the MDE estimatep0maximizesPT
t¼1vtðpÞ.
We next model the main sub-problem for p ¼pðAÞ using the MDE approach. We select the minimum aggregator, which results in a maximin formulation. The MDE sub-problem for pgivenAis given by
max min
t p
0yt=p0yt : ð2:3Þ
By LP duality, we also have
p0yt ¼nt 0xt; ð2:4Þ
where the nt are the optimal dual variables for problem Pt. Therefore, the decisional efficiency vt
for observation tcan be expressed as
vt¼p0yt=nt 0xt; ð2:5Þ
wherent 0xtis the optimal solution to the dual
prob-lemDtassociated withPt, and whereDtis given by
Dt: min nt0xt; ð2:6Þ
s:t: A0nt¼p; ð2:7Þ
ntP0 componentwise: ð2:8Þ We have chosen the constraints (2.7), as opposed to A0ntPp, for the following reason. We assume that all data vectorsyt have strictly positive
com-ponents. In turn, we assume that the unobserved
yt -vectors also have strictly positive components.
Since these yt -vectors may be considered as the
dual variables for the constraints (2.7), the slack variables of the constraints A0ntPp must be zero by complementary slackness.
Next, we note that a normalization is necessary. Namely, if p is replaced bykp in problems,Pt or
Dt, where k>0, then the corresponding dual variables are also multiplied bykwithout changing the value of the efficiency ratios vt. For this
pur-pose, we choose the normalization constraint
nt0 0xt0 ¼1; ð2:9Þ
wheret0is a particular index choice.
Finally, it is necessary to insure that the effi-ciency ratios do not exceed unity. This can be accomplished by including the constraints
p0yt6nt 0xt for allt: ð2:10Þ
Collecting these considerations, the estimation model for thepgivenAsub-problem is then given by model MMA.
MMA: max min
t p
0yt=
nt0xt; ð2:11Þ
s:t: A0nt¼p componentwise for allt; ð2:12Þ p0yt6nt0xt for allt; ð2:13Þ
nt00xt0¼1; ð2:14Þ
It is important to note that the maximization of the minimum ratio in (2.9) requires that nt0xt be
simultaneously minimized, which together with constraints (2.10) and (2.13), make the resultingnt
optimal for the problemsDt, corresponding to the vectorp. In particular, whenp is the optimal p -solution for problem MMA, then the associated optimal nt can be seen to be the corresponding optimal dual variables nt .
Model MMA is a generalized fractional pro-gramming problem for which several algorithms have been proposed. See, for example, Crouzeix et al. (1985), Crouzeix and Ferland (1991), Parda-los and Phillips (1991), Barros et al. (1996a,b) and Gugat (1996). However, it is also amenable to solution by general-purpose nonlinear program-ming algorithms such as the GRG2 nonlinear solver in Microsoft ExcelTM. For the numerical
illustration below, a further simplification is shown by which the MMA model can be reduced to a linear programming problem.
3. Generation of the admissible candidate constraint matrices
It is useful to limit the class from which esti-mates of theA-matrix can be chosen.
Definition 1. We call matrix A a technically effi-cient constraint matrix if (i) Ayt6xt
component-wise for all t, (ii) the elements of A are nonnegative, and (iii) Ayt¼xt for at least one
index-t, for each index-i.
The aim of Definition 1is to limit the search to those nonnegative matrices that are ‘‘tight fitting’’ as discussed further below. This class of matrices can be represented with the help of:
Definition 2. We call K¼ fkirg a constraint gen-erator matrix if kirP0 for all i and r, and
P
rkir¼1for alli. For each row-i, define scalars ji calledrow scale factors, by
ji ¼min vector. Finally, we define the corresponding admissibleA-matrix by
A¼ fairg ¼ fjikirg: ð3:2Þ
Thus, vector ki determines the orientation of the ith constraint hyper-plane, andji is a scale factor so that the constraint P
rairy
the tightest fitting half-plane, which encloses all data vectors. Thus by tightest fitting, we mean that the constraint forms the smallest half-space that includes all of the data.
Representation of the K-matrix can be further simplified as follows. Define variables, uir, for
i¼1;. . .;I andr¼1;. . .;R1, as follows. First, By discretizing the interval for each uir into N -steps, this search space can be refined to any de-sired degree. For example, with N ¼100 and a step size ofN1¼0:01, values of uir could be
se-lected from f0:01;0:02;. . .;1:00g. Section 5 gives this process is in detail.
4. Construction of the likelihood function
Let A be a specified candidate matrix. By solution of model MMA, an estimate,p ¼p ðAÞ, can be determined. Also the efficiency ratios
vt¼vtðAÞ ¼p 0yt=nt
xt¼p 0yt=zt ð4:1Þ
can then be computed. Thevtare distributed over
the interval½0;1, and a specific pdf model can be fitted to thevt
vectors y, for each problem Pt, as will be seen below. The following additional definitions are needed. Let Ft¼ fy:Ay6xt;yrP0 for allrg be
the set of feasible decision vectorsy, for the prob-lemPt, and letzt be the optimal objective function
value for Pt. Next, let Stðv;xtÞ ¼ fy2Ft:p0y¼
vzt g. These sets contain those feasible vectors that
have efficiency scorev. We note that these sets vary witht. This is because, while the constraint matrix
A is the same for each problem Pt, the differing resource data vectorsxtcreate different constraints
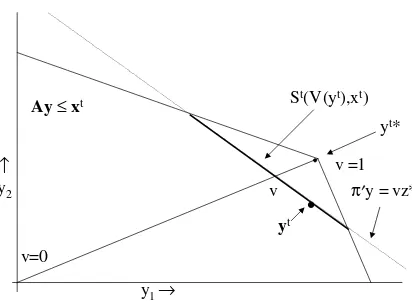
(half-spaces) for eacht. Fig. 1depicts problemPt
and these relationships for the case ofy2R2.
Next, defineWtðvÞ ¼S
v0PvStðv;xtÞas the set of
vectors that are feasible for problemPt, and which also have efficiency scores of v or greater. Also, define the functionsVtðyÞ ¼p0y=zt . These are
de-fined on the set of feasible vectors for problemPt
and give the efficiency values of the feasible y -vectors. For example,VtðytÞ ¼vt.
We are now able to propose pdf models ftðyÞ
for the feasible sets of problems Pt. These pdfs represent the composition of a two-step process. First, a value v, 06v61, is selected according to the pdfgðvÞ. Then givenv, a vectoryis selected on the set Stðv;xtÞ according to the uniform pdf on
that set. Let Dv be a small positive number and consider the approximation of Probðv6VðyÞ6
vþDvÞin two ways. First, this probability is given by
Z vþDv
v
gðuÞduffigðvÞDv: ð4:2Þ
By the uniform pdf assumption, fðyÞ is constant on Stðv;xtÞfor eachvand has value uðvÞ, say, on
these sets. It follows that
Probðv6VðyÞ6vþDvÞ
¼
Z
fy:v6VðyÞ6vþDvg
fðyÞY
R
r¼1
dyr
ffiuðvÞ½mðWðv;xÞÞ mðWðvþDv;xÞÞ: ð4:3Þ The volume measure in brackets can be further approximated. For small Dv, it is given by the product of the surface measuremðStðv;xtÞÞand the
distance element kDv corresponding to Dv and orthogonal toStðv;xtÞ. This distance is the length
of the projection of the vector ðDvÞy in the direction of vector p, which is
ðDvÞz=kpk: ð4:4Þ
It follows that
mðWðv;xÞ mðWðvþDv;xÞ ffimðStðv;xtÞÞð
DvÞz=kpk: ð4:5Þ Combining results, we have in the limit asDv!0,
gðvÞ ¼uðvÞmðStðv;xtÞÞðDvÞz=kpk: ð4:6Þ Therefore
ftðyÞ ¼uðVtðyÞÞ; ð4:7Þ
where
uðvÞ ¼ kpkgðvÞ½zmðStðv;xtÞÞ1
: ð4:8Þ To summarize, the pdf 4for vectorsy in prob-lemPt is given by
ftðyÞ ¼ kpkgðVtðyÞÞ½zt mðStðv;xtÞÞ1: ð4:9Þ Finally, assuming independence, we obtain the likelihood of the data sample as
Lðy1;
. . .;yT;x1;
. . .;xtjp;AÞ ¼YT t¼1
ftðytÞ; ð4:10Þ
y1 → ↑
y2
Ay≤xt
v
v =1
v=0
St(V(yt),xt)
•
yt
πy = vz* yt*
Fig. 1. ProblemPtinR2. Although depicted,yt is unobserved
and is not used in the estimation procedure.
when eachftðytÞis defined. One or more of these
could, in theory, be undefined in the event that for some t, mðStðv;xtÞÞ ¼0 in (4.9). In that case, we
propose the following heuristic. If any ftðytÞ is
undefined, its value is replaced by the largest of those, which are defined. Then (4.10) is calculated by the revised values. This heuristic, which we call
indented likelihood, has the following properties. A sample will have defined likelihood unless for everyt,yt¼yt . This condition could only occur if
every observed yt is an optimal solution of
prob-lem,Ptfor the estimatedpandA, a condition that can be regarded as unlikely. Except for that case, the likelihood will be defined and may have any value in ½0;1Þ. This heuristic is discussed further in Section 6.
Remark. The density model given by (4.9) reflects
the combined influences of both efficiency with respect to the objective function value and the geometry of the constraints. An output vector will have a high pdf value to the extent that it has a large gðvÞ-value and/or a small mðStðv;xtÞÞ-value.
The density models ftðyÞ may be regarded as
combining these separate influences.
5. Summary of the method and a numerical illustration
5.1. Initialization and summary of the method
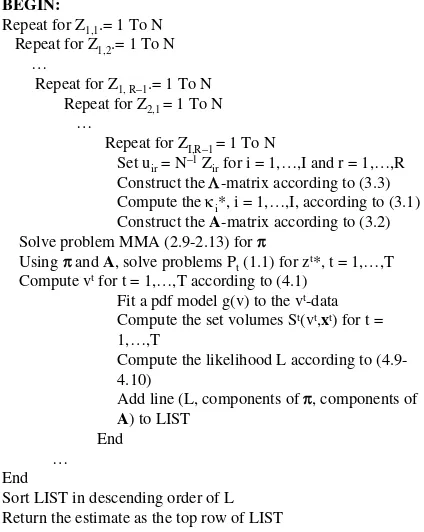
A summary of the estimation method is given in the form of pseudo-code in Fig. 2.
To initialize, choose the number of stepsN for discretizing the ½0;1 ranges of the uir. Let Zi;r be
integer variables. Set the all entries of matrix
U¼ fuirg to the value N1. Initialize LIST as an
empty table with number of fields given by 1þRþIR, where 1accounts for the scalar value of L, R accounts for the components of p, andIRaccounts for the components ofA.
5.2. Fitting the pdf and computing volumes of polytopes
Since thevt-data lie in the interval ½0;1, a
ver-satile pdf modeling approach can be based on the
two-parameter gamma pdf. First, transform the data by way of x¼ ðlnvÞ2 so that x2 ½0;1Þ. Then model the pdf of x as the two-parameter gamma pdf. Some related details can be found in Troutt et al. (2000), which provides a method of moments approach to fitting the gamma model.
For the evaluation of the volumes of the sets
Stðvt;xtÞ, which are convex polytopes, exact
algo-rithms have been proposed. See, for example, B€ueler et al. (1998), Lawrence (1991), Verschelde et al. (1994), and Cohen and Hickey (1979). Codes in C are available through the home page website5 of Prof. K. Fukuda. In the numerical illustration that we present in the next section, the calculations are elementary and do not require the specialized software.
BEGIN:
Repeat for Z1,1.= 1 To N Repeat for Z1,2.= 1 To N
…
Repeat for Z1, R−1.= 1 To N
Repeat for Z2,1 = 1 To N
…
Repeat for ZI,R−1 = 1 To N
Set uir= N −1Z
irfor i = 1,…,I and r = 1,…,R
Construct the Λ-matrix according to (3.3)
Compute the κi*, i = 1,…,I, according to (3.1)
Construct the A-matrix according to (3.2)
Solve problem MMA (2.9-2.13) for π
Using ππand A, solve problems Pt(1.1) for zt*, t = 1,…,T
Compute vtfor t = 1,…,T according to (4.1)
Fit a pdf model g(v) to the vt-data
Compute the set volumes St(vt,xt) for t =
1,…,T
Compute the likelihood L according to (4.9-4.10)
Add line (L, components of π, components of
A) to LIST
End … End
Sort LIST in descending order of L Return the estimate as the top row of LIST
Fig. 2. Summary of the estimation procedure in pseudo-code form.
5.3. A numerical illustration on simulated data
An example of the procedure is developed here for simulated data. For simplicity, we consider two outputs and two inputs. In addition, constant input vectors are used. This permits an additional sim-plification in that problem MMA simplifies to an LP problem. This can be seen as follows. We have
xt¼ ðx
1;x2Þ0 and nt¼ ðn1;n2Þ0 for all t. Then, in
problem MMA, the objective function simplifies to
max min
t p
0yt=nt0xt
¼max min
t ðp1y t
1þp2y2tÞ=ðn1x1þn2x2Þ: ð5:1Þ
Now by the normalization constraint, n1x1þ
n2x2¼1, so that (5.1) simplifies further to
max mintp1y1tþp2y2t: ð5:2Þ
Objective functions of this kind can be converted to linear ones by the introduction of an auxiliary variable,w, for which
w¼min
t p1y t
1þp2y2t: ð5:3Þ
Then maximization ofw, along with the additional constraints
w6p1yt1þp2y2t for allt; ð5:4Þ
ensures that (5.3) holds at the optimal solution. Thus, it follows that problem MMA reduces to the following LP problem:
max w; ð5:5Þ
s:t: w6p1y1tþp2y2t for allt; ð5:6Þ
A0n¼p componentwise for allt; ð5:7Þ
p1yt1þp2y2t61for allt; ð5:8Þ
n1x1þn2x2¼1; ð5:9Þ
w;p1;p2;n1;n2P0: ð5:10Þ
Data sets consisting of 30 output vectors ðyt
1;y2tÞ,
t¼1;. . .;30, were simulated from the following stipulated true model:
Stipulated true LP model:
max p00y¼5y1þ3y2; ð5:11Þ
s:t: 2y1þy2640; ð5:12Þ
y1þ3y2660; ð5:13Þ
yiP0: ð5:14Þ
The constraints and objective function orientations for this model are depicted in Fig. 1. Thus, p0¼ ð5;3Þ0, xt¼ ð40;60Þ0, and zt ¼108 for t¼1;. . .;30. Random yt-observations were
gen-erated as follows. First, a vt-value was simulated
from the positive exponential density, gðvÞ ¼
gaðvÞ ¼Caeav,v2 ½0;1, for whichCa¼aðea1Þ
1
, and for which the cdf is given by GðvÞ ¼ ðea1Þ1
ðeav1ÞThe parameter valuea¼8, was
chosen. Then, for eachvt-value, aytsuch that
po0yt¼vtzt ð5:15Þ
was generated using the uniform pdf on the line segment defined by the constraints (5.2)–(5.4) and (5.5). Fig. 1may be referenced again. The end-points of this segment were determined by maximizing and minimizing yt
2 subject to the feasibility constraints.
The Lebesgue measure of the set Stðv;xtÞ is the
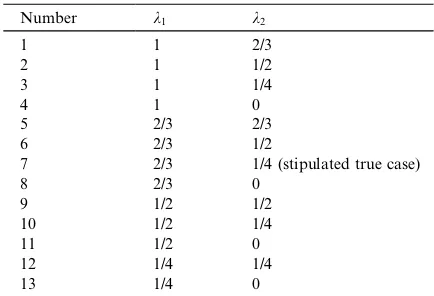
length of the line segment defined by those end-points, and the uniform pdf on the segment is the reciprocal of that length. Several candidate A -matrices were constructed as follows. Pairs of row generator vectors were selected as in Table 1. Then, the ji-factors and corresponding A-matrices were computed according to the procedure of Section 3.
Twenty-five such data sets, of 30 observations each, were simulated and the estimation steps were completed for each data set. The estimatedp -vec-tor6 and the mean, v, of the vt-values were Table 1
Candidate matrices
Number k1 k2
112/3
2 11/2
3 11/4
4 1 0
5 2/3 2/3
6 2/3 1/2
7 2/3 1/4 (stipulated true case)
8 2/3 0
9 1/2 1/2
10 1/2 1/4
11 1/2 0
12 1/4 1/4
13 1/4 0
obtained. The pdf modelgaðvÞ ¼Caeavwas fitted to the observedvt-values by the method of maximum
likelihood estimation (MLE). The MLE estimate of
acan be verified to be the solution of the equation
a1eaðea1Þ1
þv¼0; ð5:16Þ
which was solved by Newtons method using a starting value of a0¼2. Finally, the likelihood
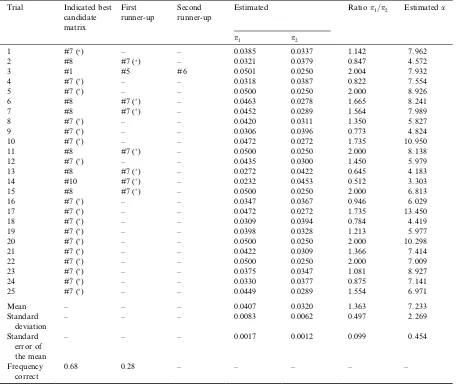
value for each observation was calculated using (4.9) and (4.10). The results were obtained using SAS/IML (1989) and are shown in Table 2.
From Table 2, the stipulated true matrix, number seven, was identified for 68% of these randomly simulated data sets. For those trials in which the maximum likelihood candidate was incorrect, the correct matrix was identified as having next highest likelihood in all but one trial. In addition, in all but one of the misidentified trials, matrix number eight was the one actually identified. It can be noted that matrix number eight is close to matrix number seven in the sense that one constraint is the same and the other has
Table 2
Estimation results for 25 consecutive data set simulations based on the stipulated assumptions
Trial Indicated best candidate matrix
First runner-up
Second runner-up
Estimated Ratiop1=p2 Estimateda
p1 p2
1#7 () – – 0.0385 0.0337 1.142 7.962
2 #8 #7 () – 0.03210.0379 0.847 4.572
3 #1#5 #6 0.05010.0250 2.004 7.932
4 #7 () – – 0.0318 0.0387 0.822 7.554
5 #7 () – – 0.0500 0.0250 2.000 8.926
6 #8 #7 () – 0.0463 0.0278 1.665 8.241
7 #8 #7 () – 0.0452 0.0289 1.564 7.989
8 #7 () – – 0.0420 0.0311 1.350 5.827
9 #7 () – – 0.0306 0.0396 0.773 4.824
1 0 #7 () – – 0.0472 0.0272 1.735 10.950
11 #8 #7 () – 0.0500 0.0250 2.000 8.138
1 2 #7 () – – 0.0435 0.0300 1.450 5.979
1 3 #8 #7 () – 0.0272 0.0422 0.645 4.183
1 4 #1 0 #7 () – 0.0232 0.0453 0.512 3.303
1 5 #8 #7 () – 0.0500 0.0250 2.000 6.813
1 6 #7 () – – 0.0347 0.0367 0.946 6.029
1 7 #7 () – – 0.0472 0.0272 1.735 13.450
1 8 #7 () – – 0.0309 0.0394 0.784 4.419
1 9 #7 () – – 0.0398 0.0328 1.213 5.977
20 #7 () – – 0.0500 0.0250 2.000 10.298
21#7 () – – 0.0422 0.0309 1.366 7.414
22 #7 () – – 0.0500 0.0250 2.000 7.009
23 #7 () – – 0.0375 0.0347 1.081 8.927
24 #7 () – – 0.0330 0.0377 0.875 7.141
25 #7 () – – 0.0449 0.0289 1.554 6.971
Mean – – – 0.0407 0.0320 1.363 7.233
Standard deviation
– – – 0.0083 0.0062 0.497 2.269
Standard error of the mean
– – – 0.0017 0.0012 0.099 0.454
Frequency correct
0.68 0.28 – – – – –
slope near to that of the other constraint of matrix number seven.
The mean of the estimated ratio p1=p2 was
1.363, as compared to 1.6, for the stipulated model. This is a difference of 2.39 standard errors of the mean. It should be noted that the stipulated model (5.11)–(5.14) has a large range of optimality that yields ratios in the range (0.333, 2.000). All trials but one, number three, yielded ratios in this range. Perhaps less estimation precision for the objective function vector should be expected due to the wide range of optimality for this example.
The reader is cautioned that these results are merely illustrative and do not constitute an ade-quate simulation study of the method. However, we believe they suggest that the method might be reasonably effective and is worthy of a more com-prehensive simulation study. For this example, the method appeared less effective in identifying the correct distribution parameter a. However, accu-racy of this estimate may be neither necessary nor sufficient for correct identification of the matrix. See, for example, trial nine (good matrix identifi-cation but poora-estimate) and trial three (gooda -estimate but poor matrix identification). Similar observations hold with respect to the a-estimate and thep1=p2ratio estimates. This is evidenced by
trials one, four, ten, eleven and fifteen in Table 2.
6. Limitations and potential extensions
6.1. Validation of the optimization goal
The major theoretical assumptions are that: (i) linear programming models with the samepandA
were appropriate for each observation, and (ii) that the organization or decision maker(s) have chosen or otherwise produced outputs which approximate optimal solutions to these models. The appropriateness of the second assumption can be judged to some degree by the magnitude of the likelihood scores, and the degree of concentration of the fitted gðvÞ pdf toward the ideal value of unity for v. In Troutt et al. (2000), a criterion, called normal-like-or-better performance effective-ness, has been proposed as a test for the optimi-zation goal.
6.2. Other decision model orientations
The basic decision model class assumed here is that of the Pt, which may be described as output-oriented. Namely, output values were to be approx-imately maximized subject to given resources. A cost minimization input-oriented model could be developed along similar lines. That is, suppose the data are regarded as attempts to minimize input costs subject to required outputs. The basic models,
Qt, analogous to thePt, can be given as
Qt: min n0xt;
s:t: BxPyt; xP0; componentwise: ð6:1Þ
The model analogous to MMA can be easily constructed for this case.
Zeleny (1986) has called attention to the LP modeling flexibilities afforded by regarding re-source levels as additional decision variables in what are called De Novo LP models. Such con-structs adapted to the present setting clearly pro-vide an avenue for further research on mixed input–output orientations.
6.3. The unbounded pdf heuristic
For the positive exponential gðvÞthat we used for the numerical illustration, the pdf value at the upper end-point of the interval gð1Þ is bounded and greater than zero. If yt¼yt and yt is the
unique optimal solution of problem Pt, then
mðStðv;xtÞÞ ¼0 in (4.9), and thus (4.9) tends to the
Other heuristics could be proposed. For exam-ple, the xt-vectors might be stretched by a factor
such as 1þein order to prevent any data vector,
yt, from being an exactly optimal solution to its
respective problemPt. However, we have not ob-served the occurrence of these problem cases so far in our experiments with the method.
6.4. Use of other aggregators in the MDE technique
The sum or average aggregator could be used to develop a model like the MMA model above. The resulting model would require maximization of the sum of the efficiency ratios. While the problem of optimizing the sum of linear fractional functions subject to linear constraints is challenging, some algorithms have been proposed. Schaible and Shi (2003) provide a recent survey.
7. Conclusions
We have defined a version of the Inverse LP problem that we call Linear Programming System Identification. This problem seeks to identify both the objective function coefficient vector and the constraint matrix of a linear programming prob-lem that best fits a set of observed vector pairs. One vector of each pair is considered an approxi-mately optimal decision vector for the linear pro-gramming problem when the other vector is the resource vector of that problem. An algorithm was proposed for approximating a maximum likeli-hood solution. Results were illustrated for an example in two dimensions. Some preliminary simulation results for that example suggest that the method may be promising and is worthy of a more comprehensive simulation study for future re-search.
Acknowledgements
We wish to thank an anonymous referee for many helpful suggestions. We are also indebted to Dr. L.F. Cheung for stimulating discussions.
References
Ahuja, R.K., Orlin, J.B., 2001. Inverse optimization. Opera-tions Research 49 (5), 771–783.
Barros, A.I., Frenk, J.B.G., Schaible, S., Zhang, S., 1996a. A new algorithm for generalized fractional programs. Math-ematical Programming 72, 147–175.
Barros, A.I., Frenk, J.B.G., Schaible, S., Zhang, S., 1996b. Using duality to solve generalized fractional programming problems. Journal of Global Optimization 8, 139–170. B€ueler, B., Enge, A., Fukuda, K., 1998. Exact volume
compu-tation for convex polytopes a practical study. In: Kalai, G., Ziegler, G. (Eds.), Polytopes––Combinatorics and Compu-tation. DMV-Seminars. Birkh€auser Verlag.
Cohen, J., Hickey, T., 1979. Two algorithms for determining volumes of convex polyhedra. Journal of the Association for Computing Machinery 26 (3), 401–414.
Crouzeix, J.J., Ferland, J.A., 1991. Algorithms for generalized fractional programming. Mathematical Programming 52, 191–207.
Crouzeix, J.J., Ferland, J.A., Schaible, S., 1985. An algorithm for generalized fractional programs. Journal of Optimiza-tion Theory and ApplicaOptimiza-tions 47, 35–49.
Gugat, M., 1996. A fast algorithm for a class of generalized fractional programs. Management Science 42 (10), 1493– 1499.
Lawrence, J., 1991. Polytope volume computation. Mathemat-ics of Computation 57 (196), 259–271.
Pardalos, P.U., Phillips, A.T., 1991. Global optimization of fractional programs. Journal of Global Optimization 1, 173–182.
SAS/IML, 1989. Software: Usage and Reference. Version 6, first ed. SAS Institute, Inc., Cary, NC.
Schaible, S., Shi, J., 2003. Fractional programming: The sum-of-ratios case. Optimization Methods and Software 18 (2), 219–229.
Tarantola, A., 1987. Inverse Problem Theory: Methods for Data Fitting and Model Parameter Estimation. Elsevier, Amsterdam.
Troutt, M.D., 1995. A maximum decisional efficiency estima-tion principle. Management Science 41, 76–82.
Troutt, M.D., Gribbin, D.W., Shanker, M., Zhang, A., 2000. Cost efficiency benchmarking for operational units with multiple cost drivers. Decision Sciences 31(4), 813–832. Troutt, M.D., Pang, W.-K., Hou, S.-H., 2003. Vertical Density
Representation and Its Applications. World Scientific Pub-lishing Co. Pte. Ltd., Singapore.
Verschelde, J., Verlinden, P., Cools, R., 1994. Homotopies exploiting Newton polytopes for solving sparse polynomial systems. SIAM Journal on Numerical Analysis 31(3), 915– 930.
Zhang, J., Liu, Z., 1996. Calculating some inverse linear programming problems. Journal of Computational and Applied Mathematics 72, 261–273.