ESTIMASI JARAK DAN POSISI ORIENTASI OBJEK
MENGGUNAKAN STEREO CAMERA DAN KALMAN
FILTER
Faikul Umam
Program Studi Mekatronika, Fakultas Teknik,Universitas Trunojoyo Jl. Raya Telang, PO BOX 2 Kamal, Bangkalan
E-mail : [email protected]
ABSTRAK
Dalam proses navigasi, robot memerlukan sebuah sensor untuk mengenali lingkungannya. Sensor menghasilkan sinyal dan menginformasikan sinyal tersebut ke sistem berikutnya. Dalam perkembangannya, untuk meningkatkan kemampuan adaptasi robot terhadap lingkungannya, sensor berbasis kamera (visual preception) mulai digunakan untuk mendeteksi objek. Kamera menghasilkan sebuah gambar statis atau citra sebagai fungsi kontinyu pada bidang dua dimensi. Agar dapat diolah, sebuah citra harus dipresentasikan secara numerik dengan nilai-nilai diskrit yang diwakili oleh sebuah matriks dua dimensi f(x,y). Pengukuran jarak dan posisi orientasi objek menggunakan satu kamera masih memiliki kesalahan yang cukup tinggi yakni mecapai 75 %. Untuk menangani hal ini, terinspirasi dari penglihatan manusia, dikembangan sebuah sensor menggunakan 2 buah kamera yang dipasang sejajar dan dipisahkan oleh jarak yang dikenal dengan sistem stereo camera. Dalam proses identifikasi objek, digunakan Hough Transform untuk identifikasi objek diam dan Haar Cascade untuk identifikasi objek bergerak. Untuk membantu menghilangkan noise dalam proses identifikasi objek digunakan Kalman Filter. Berdasarkan pengujian, error maksimum pengukuran hanya 3,6 % pada jarak 280 cm untuk objek diam dan 3,4% pada jarak 250 cm untuk objek bergerak.
Kata kunci : Stereo Camera, Hough Transform,Haar Cascade, Kalman Filter.
ABSTRACT
robot navigation systems require sensors to recognize its environment. The sensor generates a signal and transmit it to the next system. To improve the robot adaptation to the environment, the camera-based sensor is used to detect objects, The camera produces a static image or image as a continuous function of the two-dimensional plane. In order to be processed, an image must be presented numerically by discrete values represented by a two-dimensional matrix. Angle and distance measurements using a single camera still has a high error is 75%. To resolve that, designing stereo camera sensor inspired by binocular vision. In the process of object identification, Hough Transform algorithm is used for static object identification and Haar Cascade Classifier for moving object identification, and then kalman filter is designing to eliminate some noise. Based on testing, the maximum measurement error 3.6% at a distance of 280 cm for static objects and 3.4% at a distance of 250 cm for moving objects.
PENDAHULUAN
Pengolahan citra digital saat ini banyak digunakan sebagai objek penelitian. Disiplin ilmu tersebut telah banyak memberikan hal positif untuk kehidupan manusia. Hampir disegala bidang kehidupan, teknik ini memiliki peran yang cukup berarti. Misalnya saja dalam bidang pemerintahan, teknik ini digunakan untuk pengembangan e-KTP.
Pengembangan salah satu teknik pengolahan citra digital dapat memberikan kontribusi terhadap disiplin ilmu yang lain. Misalnya dalam dunia robotika, pengolahan citra digital mulai digunakan untuk memperbaiki sistem navigasi. Saat ini, sensor berbasis kamera telah banyak diaplikasikan pada sistem navigasi robot. Hal ini juga telah menginspirasi pemerintah untuk mengembangkan ilmu pengetahuan dengan mengadakan kompetisi robot pemain sepak bola menggunakan sensor kamera.
Pengembangan sensor berbasis kamera memang memiliki tantangan dan kesulitan yang sangat tinggi, selain memerlukan proses komputasi yang cepat, faktor dari luar juga mempengaruhi kinerja sensor tersebut, misalnya intensitas cahaya.
Awalnya hanya digunakan satu kamera untuk identifikasi objek, tetapi hal ini masih dianggap memiliki banyak kelemahan atau belum cukup memenuhi kebutuhan sistem navigasi, karena error pengukuran jarak dan posisi orientasi objek masih sangat besar yakni mencapai 75% [1]. Kemudian dikembangkan sebuah sensor perpaduan antara kamera dan laser. Hasilnya cukup memuaskan, sensor jenis ini memiliki kehandalan dalam mendeteksi objek 2 dan 3 dimensi [2].
Bahkan pada penelitian terbaru, teknik stero vision dikembangkan berdasarkan kombinasi dari kamera Omni-directional dan kamera perspektif. Teknik ini menggabungkan bidang pandang 360o dari kamera Omni-directional dengan bidang pandang yang panjang dari kamera perspektif yang
digunakan untuk mengetahui perkiraan posisi hambatan 3 dimensi. Penelitian ini menunjukkan hasil yang sangat baik, yakni halangan dapat dideteksi secara real time [3].
Berdasarkan hal tersebut, maka pada penelitian ini dikembangkan sebuah sensor menggunakan 2 buah kamera yang dipasang sejajar dan dipisahkan oleh jarak untuk estimasi pengukuran jarak dan posisi orientasi objek. Untuk mengetahui keakuratan dari sensor ini, digunakan dua objek yang berbeda, yakni identifikasi objek diam menggunakan Hough Transform dan identifikasi objek bergerak menggunakan Haar Cascade.
METODE
Stereo Camera
Struktur biologis manusia sudah banyak mengilhami para peneliti untuk terus melakukan riset, misalnya Stereo Camera. Terbentuknya algoritma Stereo Camera diilhami oleh penglihatan kedua mata pada manusia (Binocular vision), dinama data atau objek yang dilihat oleh kedua mata kita sebenarnya letaknya berbeda dan tumpang tindih. Hasil penglihatan mata kanan memiliki nilai posisi sendiri (x, y) begitu juga dengan mata kiri, ini disebabkan karena kedua mata memiliki perdebaan sudut pandang dalam melihat sebuah objek.
Gambar 1 menjelaskan bahwa mata kanan dan mata kiri mendeteksi sebuah objek, posisi objek yang ditangkap oleh mata kanan berbeda dengan posisi objek yang ditangkap oleh mata kiri. Semakin dekat sebuah objek dengan mata, maka perbedaan tersebut akan semakin jelas.
Pada sistem Stereo Camera, dua buah kamera dipasang sejajar yang dipisahkan oleh jarak, kedua kamera mengambil gambar pada saat yang bersamaan, dengan menggunakan geometri kamera, maka geometri area tangkapan kamera dapat dihitung. Semakin dekat sebuah ojek dengan kedua kamera, maka semakin besar perbedaan posisi objek tersebut terhadap kedua kamera. Perbedaan ini kemudian dikenal dengan disparity.
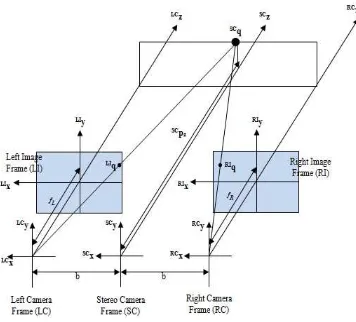
Seperti pada Gambar 2, Sumbu optik kedua kamera adalah sejajar dan dipisahkan oleh b, dalam hal ini b adalah baseline yaitu jarak antara titik tengah kamera kiri dan titik tengah kamera kanan. Sebuah sistem koordinat terpasang dimana sumbu x (LCX, RCX dan SCX) sejajar dengan b dan sumbu z (LCZ,
RCZ dan SCZ) sejajar dengan sumbu optik.
Titik SCq adalah titik dalam sebuah ruang hasil tangkapan kamera. Titik SCq memiliki koordinat (x, y, z) yang merupakan hasil proyeksi dari titik LIq(x, y) dan RIq(x, y) [4][5].
Gambar 2. Geometri Stereo Camera
Proyeksi dari stereo camera frame ke left image frame dan right image frame adalah urutan operasi translasi dan transformasi proyeksi dimana nilai focal length f adalah sama dengan fL dan fR. Proyeksi titik stereo cameraframe ke left image frame seperti pada persamaan (1), sedangkan proyeksi titik stereo cameraframe ke right image frame seperti pada persamaan (2).
Sehingga titik SCq (x, y, z) yang diproyeksikan dari titik LIq(x, y) dan RIq(xr, yr). dapat dicari dengan persamaan
(3).
Pada penelitian ini, pendeteksian objek bergerak menggunakan deteksi upper body. Pendeteksian upper body dianggap sebagai kasus tertentu dari kelas deteksi objek, dimana tugas utama dari deteksi objek adalah menemukan lokasi dan ukuran sebuah objek yang diinginkan dalam sebuah video atau image. Terdapat banyak metode yang dapat digunakan untuk melakukan pendeteksian upper body, salah satunya adalah metode jones. Metode viola-jones cukup efektif dan cepat untuk diterapkan pada deteksi upper body, mengingat sensor yang digunakan adalah stereo vision [6].
Gambar 3. Cascade Classifier
Pendeteksian Upper Body diawali dengan capture oleh kamera yang menghasilkan image dalam bentuk RGB,
image RGB kemudian dikonversi
maka dibuat sebuah penanda berupa kotak segi empat di area sekitar Upper Body.
Hough Transform (HT)
Deteksi objek diam pada penelitian ini menggunakan objek berupa
lingkaran, dimana algoritma
pendeteksian yang digunakan adalah Hough Transform (HT). HT merupakan suatu teknik untuk menentukan lokasi suatu bentuk dalam citra. Metode ini bisa dikatakan metode yang pintar, karena pada dasarnya setiap pixel yang ada pada citra akan men-vote pada setiap daerah yang dia perkirakan ada bentuk geometri yang dimaksud.
Dalam implementasinya, HT melakukan pemetaan terhadap titik-titik pada citra ke dalam parameter space (HT space) berdasarkan suatu fungsi yang mendefinisikan bentuk yang ingin dideteksi. HT dapat dideskripsikan sebagai sebuah transformasi dari sebuah titik pada bidang xy terhadap ruang parameter, dimana ruang parameter ditentukan berdasarkan bentuk objek yang dicari. Sebuah garis lurus melewati titik (x1, y1) dan (x2, y2) terhadap bidang xy dapat dideskripsikan dalam persamaan (4) [7].
𝑦 = 𝑎𝑥 + 𝑏 (4) 𝜌 = 𝑥 cos 𝜃 + 𝑦 sin 𝜃 (5)
Persamaan (4) merupakan persamaan garis lurus dalam koordinat
kartesian, dimana a dan b
merepresentasikan parameter dari garis. HT untuk garis tidak menggunakan representasi garis, karena garis yang tegak lurus terhadap sumbu x akan memiliki sebuah nilai tak terhingga. Hal ini memaksa ruang parameter a,b untuk memiliki ukuran yang tidak terbatas.
Sebaliknya, sebuah garis
direpresentasikan oleh garis normalnya yang dapat direpresentasikan sudut θ dan
panjang ρ seperti pada persamaan (5).
Ruang parameter sudah dapat direntang oleh θ dan ρ, dimana nilai θ tergantung pada resolusi yang digunakan
untuk θ dan Jarak ke garis ρ akan
memiliki ukuran maksimum dari dua kali panjang diagonal citra. Lingkaran sebenarnya lebih sederhana untuk direpresentasikan ke dalam ruang parameter dibandingkan dengan garis, karena lingkaran dapat langsung di-transfer ke ruang parameter.
Hough Transform dapat mencari lingkaran dengan mengganti persamaan atas kurva dalam proses deteksi. Persamaan ini bisa dalam bentuk eksplisit seperti pada persamaan (6), ataupun parametrik. Persamaan (6) mendefinisikan kedudukan titik (x,y) dari titik pusat (a,b), dengan jari-jari R atau dapat dibuat persamaan parametric :
𝑅2= (𝑥 − 𝑎)2+ (𝑦 − 𝑏)2 (6) 𝑥 = 𝑎 + 𝑅 𝑐𝑜𝑠 (𝜃) (7) 𝑦 = 𝑏 + 𝑅 𝑠𝑖𝑛 (𝜃) (8)
Pada pengerjaannya, HT akan mencari titik-titik yang diduga sebagai bagian tepi dari suatu lingkaran,
kemudian dengan menggunakan
persamaaan (7) dan (8) akan dicari nilai R, a, b. Hal ini bertujuan untuk menemukan titik pusat sebenarnya dari lingkaran yang mengandung titik-titik tersebut. Titik pusat sebenarnya baru akan diambil bila terdapat perpotongan antara lingkaran yang dibuat oleh HT.
Sama halnya seperti deteksi upper body, proses awal untuk deteksi objek lingkaran adalah proses capture dari kedua kamera. Hasil yang didapat adalah sebuah image dalam bentuk RGB, image tersebut dikonversi menjadi image dalam bentuk grayscale. Setelah image dalam bentuk grayscale didapatkan, kemudian dicari sebuah lingkaran menggunakan metode hough transform.
Kalman Filter
objek. Jika hal inidibiarkan maka hasil perhitungan akan selalu berubah-ubah meskipun objek tersebut dalam keadaan diam. Oleh karena itu, untuk mengatasi hal ini dilakukan pemfilteran menggunakan kalman filter terhadap deteksi yang dihasilkan.
Kalman filter merupakan sebuah estimator yang mengestimasi state output sensor yang kotor akibat adanya noise. Kalman filter melakukan pendekatan teknis dengan cara megira-ngira fungsi parameter dalam sebuah peramalan time-series. Kalman Filter merupakan suatu algoritma yang menggabungkan model dan pengukuran. Data pengukuran terbaru menjadi bagian penting dari algoritma filter Kalman karena data mutakhir akan mengoreksi hasil prediksi, sehingga hasil estimasi selalu mendekati kondisi yang sebenarnya [8].
Perancangan Sistem
Pada penelitian ini, sensor stereo
camera dirancang menggunakan
menggunakan 2 buah kamera web biasa. Untuk mempermudah pengoperasian dan mengurangi kesalahan pada saat proses pendeteksian dan proses perhitungan, digunakan 2 kamera web dengan tipe dan merk yang sama. Masing-masing kamera web memiliki resolusi 8MP dan angle view 50 derajat. Kedua kamera web tersebut dipasang sejajar, panjang baseline atau jarak titik tengah kamera kiri dengan kamera kanan 8 cm seperti pada Gambar 4.
Gambar 4. Rancangan Sistem Stereo Kamera
Gambar 5. Objek Penelitian Dibuat Fixed
Perubahan panjang baseline dapat mempengaruhi perhitungan jarak
dan posisi orientasi objek. Oleh karena itu, untuk meminimalisir bergersernya salah satu kamera yang menyebabkan perubahan baseline, kedua kamera dibuat fixed seperti pada Gambar 5.
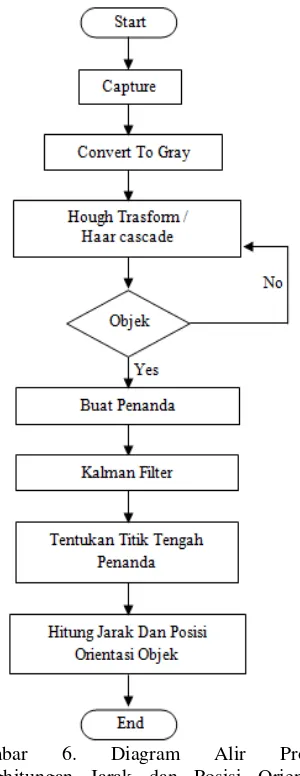
Penghitungan jarak dan posisi orientasi objek diawali dengan kamera mendeteksi sebuah objek baik itu objek bergerak maupun objek diam, kemudian sistem akan mengidentifikasi objek yang dimaksud dengan memberi penanda hasil capture objek pada masing-masing kamera. Setelah objek diidentifikasi, tentukan titik tengah masing-masing penanda (xcenter, ycenter), jadi ada empat parameter yang dihasilkan yaitu XLcenter, YLcenter, XRcenter, dan YRcenter.
Kemudian dengan menggunakan persamaan 3, jarak dan posisi orientasi objek dapat dihitung.
HASIL DAN PEMBAHASAN
Deteksi Objek
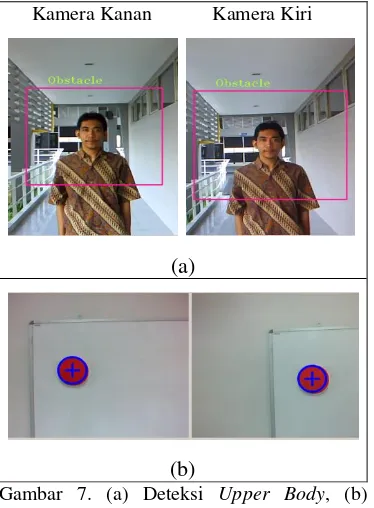
Seperti yang dikemukakan di awal, proses deteksi objek pada penelitian ini menggunakan Haar Cascade untuk objek bergerak dan Hough Transform untuk objek diam. Objek yang digunakan adalah pejalan kaki yang dikenali dengan deteksi upper body untuk objek bergerak dan digunakan lingkaran untuk deteksi objek diam.
Kamera Kanan Kamera Kiri
(a)
(b)
Gambar 7. (a) Deteksi Upper Body, (b) Deteksi Lingkaran
Objek yang telah berhasil dideteksi akan diberi sebuah penanda seperti pada Gambar 7. Deteksi kamera kanan dan kamera kiri memiliki menghasilkan posisi yang berbeda, ini disebabkan oleh sudut pandang yang berbeda dari kedua kamera tersebut.
Selama proses deteksi, penanda tidak fixed pada satu pixel meskipun objek dalam keadaan diam. Ini menyebabkan penghitungan jarak yang dihasilkan juga akan berubah-ubah, oleh karena itu setelah objek berhasil diidentifikasi dengan sebuah penanda, maka penanda akan dilakukan pemfilteran menggunakan kalman filter dengan tujuan agar penanda tidak bergerak atau berosilasi. Seperti pada
Gambar 8 dan Gambar 9, Grafik warna merah merupakan osilasi atau perpindahan penanda sebelum dilakukan pemfilteran, sedangkan grafik warna biru
adalah pemfilteran penanda
menggunakan kalman filter.
Gambar 8. Pemfilteran pada Deteksi Upper Body
Gambar 9. Pemfilteran pada Deteksi Lingkaran
Estimasi Pengukuran Jarak
Pengukuran jarak objek bergerak diuji dalam rentang 0 – 300 cm, berdasarkan hasil pengujian, jarak objek halangan bisa diukur dengan jarak terdekat 130 dan jarak terjauh 270 cm, jika jarak objek terlalu dekat maka sensor tidak dapat mengenali objek, begitu juga jika terlalu jauh sensor juga tidak dapat mengenali objek, ini disebabkan pengaturan besar kecilnya detector, jika detector di buat sangat kecil maka saat jarak dekat objek tidak akan dikenali
320 322 324 326 328 330 332 334 336 338
0 20 40 60
Pi
xel
Time
0 50 100 150 200 250 300 350 400
0 50 100 150
Pi
kse
l
begitu juga sebaliknya, dengan alasan tersebut dipilih ukuran detector 200 x 200 dengan jangkauan jarak minimum 130 cm dan jarak maksimum 270 cm.
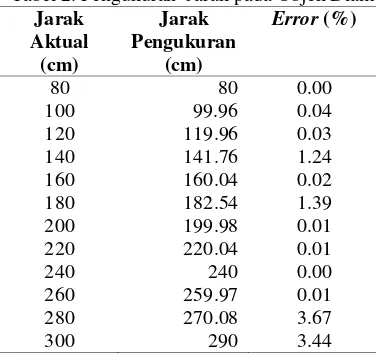
Pengukuran jarak pada objek diam diuji dalam rentang 80 – 300 cm, berdasarkan hasil pengujian seperti pada Tabel 2, jarak objek target diukur antara rentang 80 sampai 300 cm, error minimum terjadi pada saat jarak target saat 80 cm dan 240 cm dengan nilai error 0% dan error maksimum pada jarak 280 cm dengan error sebesar 3.64 %.
Tabel 2. Pengukuran Jarak pada Objek Diam Jarak
Estimasi Pengukuran Posisi Orientasi
Selain jarak, parameter lain yang diperlukan untuk mengidentifikasi keberadaan sebuah objek adalah posisi
orientasi halangan, dalam hal ini posisi orientasi yang dimaksud adalah sudut objek.
Setiap kamera memiliki angle view yang berbeda-beda. Spesifikasi yang dikeluarkan oleh vendor menyatakan bahwa angle view pada kamera Prolink tipe PCC5020 adalah 70 derajat. Pada saat pengukuran kamera tipe ini hanya memiliki angle view sebesar 50 derajat, nilai ini didapatkan dari hasil pengukuran dengan cara menarik garis lurus dari view kedua kamera dengan resolusi yang dipakai, jika resolusi yang dipakai adalah 640 x 320, maka dapat dipetakan seperti Tabel 3.
Tabel 3. Pemetaan Sudut dengan Pixel Image
Piksel 0 320 640 menggunakan persamaan 9.
𝑦 = −0.0781𝑥 + 25 (9) dimana y adalah sudut, dan x adalah nilai piksel. Hasil Penghitungan ditunjukkan pada Tabel 4.
SIMPULAN
Berdasarkan hasil penelitian, proses penghitungan jarak pada stereo camera diawali dengan menghilangkan noise yang menyebabkan detector selalu bergerak menggunakan kalman filter. Error maksimal pada pengukuran objek bergerak hanya berkisar 3,4%, sedangkan error maksimal pada pengukuran objek diam hanya 3.6 %. Dari hasil ini, pengukuran jarak menggunakan stereo camera lebih presisi dibandingkan dengan pengukuran hanya menggunakan single camera.
DAFTAR PUSTAKA
[1]. Pambudi. W.S., Salamah. I, Tompunu. A.N., 2011. Deteksi dan Estimasi Jarak Objek Menggunakan
Single Camera Dengan Model Segmentasi HSV, Seminar Nasional Teknoin, D134-D137.
[2]. Soumare. S, Ohya A., Yuta S., 2004. Real-Time Obstacle Avoidance By An Autonomous Mobile Robot Using An Active Vision Sensor And A Vertically Emitted Laser Slit, Intelligent Robot Laboratory, University of Tsukuba Japan. [3]. Lauer M, Schönbein M, Lange S,
Welker Stefan, 2011. 3D-Objecttracking With a Mixed Omnidirectional Stereo Camera System, Sincedirect Mechatronics 21 390–398.
[4]. Purwanto D., Imaging Geometry, Dept.Of Electrical Engineering Institut Teknologi Sepuluh Nopember (ITS), Surabaya.
[5]. Wöhler C., 2009. 3D Computer Vision Efficient Methods and Applications. Springer Dordrecht Heidelberg London, New York. [6]. Viola P., Jones M.J., 2004. Robust
Real-Time Face Detection, International Journal Of Computer Vision 57 (2), 137-154.
[7]. Pedersen S., 2007. Circular Hough Transform, Aalborg University.
[8]. Mohinder S. G
.
, Angus P. A.
, 2008. Kalman Filtering : Theory And Practice Using Matlab. Wiley, Canada..