TUGAS AKHIR – SM141501
OPTIMASI KONTROLER PID MENGUNAKAN ALGORITMA GENETIKA UNTUK PENGENDALIAN SISTEM OTOMATIS KEMUDI RUDAL
FEDRIC FERNANDO 1212100015
Dosen Pembimbing :
Prof. Dr. Mohammad Isa Irawan, M.T. JURUSAN MATEMATIKA
Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Teknologi Sepuluh Nopember
FINAL PROJECT– SM141501
PID CONTROLLER OPTIMIZATION USING GENETIC ALGORITHM FOR CONTROLLING MISSILE’S AUTOMATIC STEERING SYSTEM
FEDRIC FERNANDO 1212100015
Supervisor :
Prof. Dr. Mohammad Isa Irawan, M.T. Department of Mathematic
Faculty of Mathematics and Sciences Sepuluh Nopember Institute of Technologi Surabaya 2017
vii
OPTIMASI KONTROLER PID MENGUNAKAN ALGORITMA GENETIKA UNTUK PENGENDALIAN
SISTEM OTOMATIS KEMUDI RUDAL Nama : Fedric Fernando
NRP : 1212 100 015
Jurusan : Matematika FMIPA-ITS
Pembimbing : Prof. Dr. Mohammad Isa Irawan, M.T. Abstrak
Sistem kemudi missile adalah salah satu sistem yang masih umum untuk menggunakan kontroler PID. Kesulitan menggunakan kontroler ini adalah tuning parameter dari kontroler tersebut, dikarenakan optimasi ini menggunakan 3 kontroler. Banyak cara digunakan untuk mendapatkan nilai kontroler tersebut, mulai dari metode klasik hingga menggunakan evolutionary algorithm. Salah satu evolutionary algorithm adalah Algoritma genetika(GA), yang merupakan algoritma pencarian yang berbasis genetika dan sering digunakan dalam optimasi sistem. Dalam penelitian kali ini, dibandingkan performasi antara kontroler PID yang didapat menggunakan GA dengan nilai kontroler yang didapat menggunakan metode konvensional Ziegler-Nichols terhadap optimasi missile’s steering system. Hasil yang didapat menunjukkan bahwa kontroler PID yang didapat menggunakan GA, menunjukkan hasil yang jauh lebih baik dibanding nilai yang didapat dengan menggunakan metode Z-N. Nilai kontroler GA lebih cepat menuju set point dan lebih tahan terhadap gangguan.
Kata kunci: kontroler proporsional integral derivatif (PID), algoritma genetika, optimasi parameter
ix
PID CONTROLLER OPTIMIZATION USING GENETIC ALGORITHM FOR CONTROLLING MISSILE’S
AUTOMATIC STEERING SYSTEM Name : Fedric Fernando
NRP : 1212 100 015
Department : Matematika FMIPA-ITS
Supervisor : Prof. Dr. Mohammad Isa Irawan, M.T. Abstract
Missile’s steering system is one of the system that still commonly use PID controller. Difficulty in using this controller is tuning the controller’s parameters, because this optimization using 3 controllers. A lot of different ways can be done to get the value of that controller, such as using classical method or even using evolutionary algorithm. One of evolutionary algorithm is Genetic Algorithm(GA), GA is a search algorithm that is based on genetic principles and usually used in optimizing system. In this research, performation of controller that obtained using GA and using conventional method Zielger-Nicols compared in optimizing missile’s steering system. The result shows that PID controller obtained using GA showing a better result than PID controller obtained using Z-N method. The value of controller using GA is faster towards to the set point and more resistant to disturbance.
Keywords: proportional integral derivative(PID) controller, genetic algortihm, parameter optimization
xi
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas selesainya Tugas Akhir yang berjudul “OPTIMASI KONTROLER PID MENGUNAKAN ALGORITMA GENETIKA UNTUK PENGENDALIAN SISTEM OTOMATIS KEMUDI RUDAL”.
Dalam penyusunan Tugas Akhir ini, penulis mengalami banyak kendala, namun berkat bantuan, bimbingan, dan kerja sama dari berbagai pihak sehingga kendala – kendala tersebut dapat diatasi. Untuk itu pada kesempatan ini penulis menyampaikan banyak terima kasih dan penghargaan setinggi – tingginya kepada:
1. Orang tua penulis yang selalu memberikan dukungan, semangat, dan doa kepada penulis.
2. Bapak Prof. Dr. Mohammad Isa Irawan, M.T. selaku dosen pembimbing yang telah memberikan bantuan, perhatian, dan arahan selama pengerjaan Tugas Akhir ini. 3. Bapak Drs. Soetrisno, M.Ikom selaku dosen wali selama
penulis menjadi mahasiswa di Matematika ITS.
4. Bapak Ibu Dosen yang telah mengajar dan membina penulis selama penulis menjadi mahasiswa di Matematika ITS.
5. Rekan – rekan mahasiswa yang menjadi teman dalam suka dan duka selama ini.
6. Cume, Pakwo, yudah94id, giro, dan PING!!!, yang tanpa kehadiran mereka, Tugas Akhir ini dapat diselesaikan 1 semester lebih cepat.
7. Semua pihak yang telah memberikan dukungan dan ilmu kepada penulis dalam penyelesaian Tugas Akhir ini. Penulis menyadari bahwa dalam penyusunan Tugas Akhir ini masih mempunyai banyak kekurangan, untuk itu pula dalam
xii
pihak yang bersifat membangun juga sangat diharapkan sebagai bahan perbaikan di masa yang akan datang.
Surabaya, 19 Januari 2017
xiii DAFTAR ISI Hal HALAMAN JUDUL ... i LEMBAR PENGESAHAN ... v ABSTRAK ... vii ABSTRACT ... ix KATA PENGANTAR ... xi
DAFTAR ISI ... xiii
DAFTAR GAMBAR ... xvii
DAFTAR TABEL ... xix
DAFTAR LAMPIRAN ... xxi
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1 1.2 Rumusan Masalah ... 2 1.3 Batasan Masalah ... 2 1.4 Tujuan ... 3 1.5 Manfaat ... 3 1.6 Sistematika Penulisan ... 4
BAB II TINJAUAN PUSTAKA 2.1 Penelitian Sebelumnya ... 5 2.2 Pengertian Missile ... 6 2.3 Kontroler PID ... 7 2.3.1 Kontroler Proporsional ... 7 2.3.2 Kontroler Integral ... 8 2.3.3 Kontroler Derivatif ... 8
2.3.4 Kontroler Proporsional, Integral, dan Derivatif ... 9
2.4 Optimasi ... 10
2.5 Algoritma Genetika ... 10
2.5.1 Pendefinisian Genetik ... 11
xiv Hal 2.5.3 Evaluasi ... 14 2.5.4 Seleksi ... 15 2.5.5 Reproduksi ... 17 2.5.5.1 Crossover ... 17 2.5.5.2 Mutasi ... 20
BAB III METODOLOGI 3.1 Tahap Penelitian ... 23
3.1.1 Studi Literatur ... 23
3.1.2 Perancangan Sistem ... 23
3.1.3 Pengujian dan Analisis Sistem ... 23
3.1.4 Penyusunan Buku Tugas Akhir ... 24
BAB IV PERANCANGAN DAN IMPLEMENTASI SISTEM 4.1 Sistem Kemudi Missile ... 27
4.1.1 Analisis Sistem Kemudi Missile ... 27
4.1.2 Plant Simulink ... 30 4.2 Algoritma Genetika ... 31 4.2.1 Peeumusan Kromosom ... 31 4.2.2 Inisialisasi ... 32 4.2.3 Evaluasi ... 33 4.2.4 Seleksi ... 34 4.2.5 Reproduksi ... 35 4.2.5.1 Crossover ... 35 4.2.5.2 Mutasi ... 36 4.3 Interface ... 36
BAB V PENGUJIAN DAN PEMBAHASAN 5.1 Optimasi Menggunakan Metode Z-N ... 41
5.2 Optimasi Menggunakan Algoritma Genetika ... 43
5.3 Analisis Hasil Metode Z-N ... 45
5.4 Analisis Hasil Algoritma Genetika ... 46
5.4.1 Analisis Hasil GA Menggunakan RMSE ... 46
5.4.1 Analisis Hasil GA Menggunakan MSE ... 47
xv
5.4.1 Analisis Hasil GA Menggunakan IAE ... 49
5.4.1 Analisis Hasil GA Menggunakan ISE ... 50
5.5 Analisis Perbandingan Z-N dan GA ... 51
5.6 Uji Gangguan ... 52
5.6.1 Uji Gangguan Tetap ... 52
5.6.2 Uji Gangguan Acak ... 55
BAB VI KESIMPULAN DAN SARAN 6.1 Kesimpulan ... 59
6.2 Saran ... 60
DAFTAR PUSTAKA... 61
LAMPIRAN ... 63
xvii
DAFTAR GAMBAR
Hal
Gambar 2.1 Missile Sederhana ... 6
Gambar 2.2 Contoh Kerja Missile ... 7
Gambar 2.3 Diagaram Blok Kontroler PID ... 9
Gambar 2.4 Diagram Alir Algoritma Genetika ... 11
Gambar 2.5 Ilustrasi Representasi Solusi dalam Algoritma Genetika ... 13
Gambar 2.6 Ilustrasi Seleksi Mesin Roullete ... 15
Gambar 2.7 Ilustrasi Crossover Satu Titik ... 17
Gambar 2.8 Ilustrasi Crossover Dua Titik ... 18
Gambar 2.9 Ilustrasi Crossover Lebih Dari 2 Titik ... 18
Gambar 2.10 Ilustrasi Crossover Aritmatika ... 19
Gambar 2.11 Diagram Alir Mutasi ... 21
Gambar 3.1 Diagram Alir Pengerjaan Tugas Akhir ... 24
Gambar 3.2 Diagram Alir Pengerjaan Algoritma Genetika... 25
Gambar 4.1 Plant Sistem dengan Kontroler PID ... 31
Gambar 4.2 Ilustrasi Representasi Penyelesaian Permasalahan dalam Algoritma Genetika ... 32
Gambar 4.3 Interface Algoritma Genetika ... 37
Gambar 4.4 Parameter GA ... 38
Gambar 4.5 Nilai Akhir PID ... 38
Gambar 4.6 Interface Test Sistem ... 39
Gambar 4.7 Input Nilai PID ... 39
Gambar 4.8 Output Sistem ... 40
Gambar 5.1 PID Tuning dengan SISOtool ... 42
Gambar 5.2 Plant Sistem dengan Compesator ... 42
Gambar 5.3 Plant Sistem Terfeedback ... 42
Gambar 5.4 Nilai Fitness Terbaik Tanpa Elitism ... 44
Gambar 5.5 Nilai Fitness Terbaik Menggunakan Elitism ... 44
Gambar 5.6 Output Plant dengan Compesator ... 45
xviii
Hal
Gambar 5.8 Output Plant GA menggunakan MSE... 47
Gambar 5.9 Output Plant GA menggunakan ITAE ... 48
Gambar 5.10 Output Plant GA menggunakan IAE ... 49
Gambar 5.11 Output Plant GA menggunakan ISE ... 50
Gambar 5.12 Grafik Perbandingan Output Sistem ... 51
Gambar 5.13 Model Uji Gangguan Tetap ... 52
Gambar 5.14 Hasil Uji Gangguan Tetap ... 53
Gambar 5.15 Hasil Uji Gangguan Tetap (2) ... 54
Gambar 5.16 Hasil Uji Gangguan Tetap (3) ... 54
Gambar 5.17 Model Gangguan Acak ... 55
Gambar 5.18 Hasil Uji Gangguan Acak (1) ... 56
xix
DAFTAR TABEL
Hal
Tabel 2.1 Sifat Kontroler PID ... 9
Tabel 5.1 Parameter Algoritma Genetika ... 43
Tabel 5.2 Nilai Terbaik Setiap Fungsi Objektif ... 44
Tabel 5.3 Nilai Output Plant dengan Compesator ... 45
Tabel 5.4 Nilai Output Plant GA menggunakan RMSE ... 47
Tabel 5.5 Nilai Output Plant GA menggunakan MSE ... 48
Tabel 5.6 Nilai Output Plant GA menggunakan ITAE ... 49
Tabel 5.7 Nilai Output Plant GA menggunakan IAE ... 50
Tabel 5.8 Nilai Output Plant GA menggunakan ISE... 51
xxi
DAFTAR LAMPIRAN
Hal
Lampiran 1 Hasil Komputasi GA ... 61
Lampiran 2 Koding Untuk GA ... 63
Lampiran 3 Koding Untuk Crossover GA ... 72
Lampiran 4 Koding Untuk Menampilkan Output Sistem ... 74
Lampiran 5 Koding Uji Beban Tetap ... 76
Lampiran 6 Koding Uji Beban Acak ... 77
Lampiran 7 Koding Untuk Menampilkan Z-N dan GA Bersamaan ... 78
1 BAB I PENDAHULUAN
Bab ini membahas latar belakang yang mendasari penulisan Tugas Akhir, mencakup identifikasi permasalahan pada topik Tugas Akhir. Uraian ini bersifat umum yang menjelaskan secara ringkas hal – hal yang dilakukan pada penyelesaian Tugas Akhir. Informasi yang telah diperoleh tersebut kemudian dirumuskan menjadi permasalahan, kemudian diberikan asumsi – asumsi dan batasan – batasan untuk membatasi pembahasan pada Tugas Akhir ini.
1.1 Latar Belakang
Saat ini, kontroler Proportional Integral Derivative (PID) digunakan secara umum untuk mendapatkan solusi optimum. Solusi dikatakan optimum apabila output di kehidupan nyata sesuai dengan output yang telah kita tentukan. Oleh karena itu, kontroler adalah suatu hal yang sangat dibutuhkan. Kesulitan menggunakan kontroler adalah tuning parameter dari kontroler tersebut[2]. Dalam hal ini, telah banyak variasi metode yang digunakan untuk men-tuning parameter kontroler PID. Metode klasik yang masih sering digunakan adalah metode osilasi Ziegler Nichols, metode kurva reaksi Ziegler Nichols, dan metode kurva reaksi Cohen-Coon.
Namun, kecenderungan saat ini menunjukkan bahwa telah terjadi kenaikan drastis dalam tuning jika menggunakan algoritma yang berubah (evolutionary algorithm)[2]. Algoritma ini memberikan hasil yang lebih baik pada setiap iterasinya. Beberapa Algoritma yang sering digunakan adalah Ant Colony Optimization (ACO), Particle Swam Optimization(PSO), dan Genetic Algorithm(GA). Algoritma tersebut menggunakan pola tingkah laku dari makhluk hidup.
Algoritma Genetika (GA) adalah salah satu algoritma yang menggunakan genetika sebagai model algoritmanya. GA sendiri merupakan kecerdasaan buatan yang sering dipakai dalam
pengerjaan yang membutuhkan hasil yang memperbaiki nilai akhirnya sendiri. GA sering digunakan dalam berbagai hal, semisal optimasi, penjadwalan, dsb[1][2][3][12].
Salah satu penggunaan Kontroler PID adalah dalam steering suatu rudal. Kontroler PID digunakan salah satunya dalam mengontrol posisi sirip dari rudal, posisi dari sirip menentukan arah rudal. Dengan memosisikan sirip pada tempat yang seharusnya lebih cepat, maka akan dapat mengurangi penggunaan bahan bakar yang dimiliki rudal dan dapat membuat rudal menuju sasaran lebih cepat. Pada zaman ini, suatu rudal berteknologi canggih harus memiliki suatu sistem yang kuat, cerdas, dan akurat[2]. Oleh karena itu, dalam penulisan Tugas Akhir ini, akan dibandingkan keefektifan metode klasik Ziegler Nichols dengan metode menggunakan Algoritma Genetika untuk mengoptimasikan nilai Kontroler PID dalam suatu sistem steering rudal.
1.2 Rumusan Masalah
Berdasarkan latar belakang tersebut dapat dirumuskan permasalahan sebagai berikut:
1. Bagaimana cara mendapatkan nilai PID dengan menggunakan metode Ziegler Nichols.
2. Bagaimana cara mendapatkan nilai PID dengan menggunakan Algoritma Genetika dengan berbagai model fungsi fitness. 3. Bagaimana hasil perbandingan kinerja metode klasik Z-N dan
GA dengan berbagai fungsi fitness.
4. Bagaimana hasil perbandingan kinerja metode klasik Z-N dan GA dengan berbagai fungsi fitness terhadap pemberian gangguan.
1.3 Batasan Masalah
Ruang lingkup permasalahan dalam Tugas Akhir ini antara lain: 1. Fungsi transfer yang digunakan adalah menggunakan fungsi
transfer yang telah didapat dari paper [1].
2. Simulasi Algoritma Genetika dan metode Z-N dilakukan dengan menggunakan Matlab.
3
3. Populasi awal dari Algoritma Genetika adalah random namun dengan batasan dimana konstanta P, I, dan D masih membuat sistem stabil.
4. Fungsi fitness Algoritma Genetika akan ditentukan dengan berbagai macam indeks performasi, yaitu menggunakan RMSE (Root Mean Squared Error), MSE (Mean of Squared Error), ITAE (Integral of time multiplied by Absolute Error), IAE (Integral of Absolute Error), dan ISE (Integral of Squared Error).
5. Batas generasi Algoritma Genetika adalah menggunakan konvergensi individunya, sebesar 90%.
6. Nilai yang digunakan sebagai pembanding hasil dari metode GA dan Z-N yang digunakan adalah : rise time, overshoot, peak time, dan settling time. Selain itu, dilakukan uji gangguan sebagai pembanding kedua metode tersebut.
1.4 Tujuan
Berdasarkan rumusan masalah tersebut, tujuan Tugas Akhir ini adalah:
1. Mendapatkan nilai PID dengan menggunakan metode Ziegler Nichols.
2. Mendapatkan nilai PID dengan menggunakan Algoritma Genetika dengan berbagai model fungsi fitness.
3. Membandingkan kinerja metode klasik Z-N dan GA dengan berbagai fungsi fitness.
4. Membandingkan kinerja metode klasik Z-N dan GA dengan berbagai fungsi fitness terhadap pemberian gangguan.
1.5 Manfaat
Hasil Tugas Akhir ini memiliki manfaat sebagai berikut: 1. Dapat dijadikan acuan dalam pembuatan sistem kemudi rudal
yang optimal
2. Dapat dijadikan referensi untuk penelitian lanjut mengenai kontrol PID dengan evolutionary algorithm.
1.6 Sistematika Penulisan
Sistematika penulisan dalam Tugas Akhir ini sebagai berikut: BAB I Pendahuluan, menjelaskan tentang latar belakang,
rumusan masalah, batasan masalah, tujuan, manfaat, dan sistematika penulisan laporan Tugas Akhir.
BAB II Tinjauan Pustaka, menjelaskan tentang penelitian terdahulu, Missile, PID Controller, Optimasi, dan Algoritma Genetika.
BAB III Metode Penelitian, menjelaskan tentang tahap – tahap yang dilakukan dalam penelitian.
BAB IV Perancangan dan Implementasi sistem, menjabarkan bagaimana sistem kemudi missile, memasukan fungsi alihnya kedalam plant, pembuatan Algoritma Genetika, dan perancangan interface.
BAB V Pengujian dan Pembahasan, berisi data uji dan pembahasan mengenai hasil uji dari sistem.
BAB VI Penutup, berisi kesimpulan dan saran berdasarkan hasil analisis data dan pembahasan dari seluruh pengerjaan Tugas Akhir.
5 BAB II
TINJAUAN PUSTAKA
Pada bab ini dijelaskan tentang kajian teori dari referensi penunjang serta penjelasan permasalahan yang dibahas dalam Tugas Akhir ini, meliputi Penelitian sebelumnya, kontroler PID, optimasi, dan Algoritma Genetika.
2.1 Penelitian Sebelumnya
Penelitian terkait Tugas Akhir ini adalah Applying Genetic Algorithm to Optimization Parameter of Missile Control System oleh Zhu Supeng dkk. Dalam penelitian ini dijelaskan bagaimana cara untuk mendapatkan nilai dari Kontroler PID yang optimum dalam kemudi rudal dengan menggunakan Algoritma Genetika. Perhitungan fungsi fitness dari paper ini menggunakan Time Integral of Absolute Error dengan berbagai modifikasi untuk menjaga agar nilai fitness tidak terlalu kecil [1].
Penelitian selanjutnya adalah Design and Optimization of PID Controller Using Genetic Algorithm oleh Mantri Gauri dan Kulkarni N.R. Penelitian ini melakukan perbandingan antara pengoptimasian kontroler PID menggunakan Algoritma Genetika untuk sistem kemudi rudal dengan metode konvensional Z-N. Algoritma Genetika dalam penelitian ini menggunakan fungsi index optimal Mean Squared Error [2].
Penelitian berikutnya adalah PID Parameters Optimization by Using Genetic Algorithm: A Study on Time-delay Systems oleh Andri Mirzal dkk. Penelitian ini membahas mengenai perbandingan optimasi PID untuk mengkompensasi delay suatu sistem menggunakan metode konvesional dan Algoritma Genetika dengan bermacam nilai fitness, dengan berbagai parameter sebagai pembanding, mulai dari Overshoot, Settling Time, Rise Time, dan Peak Time [3].
Tugas Akhir ini menggunakan sistem yang sama dengan penelitian [1] dan [2], perbedaan yang dikerjakan ada pada operasi genetika GA dan bentuk fungsi objektifnya. Pada
penelitian [1] dan [2], operasi genetika yang dipakai adalah aritmatik, sedangkan pada Tugas Akhir ini digunakan bentuk biner. Bentuk fungsi objektif dalam Tugas Akhir ini ada 5, menggunakan RMSE, MSE, ITAE, IAE, dan ISE. Selain itu, Tugas Akhir ini juga menambahkan pemberian gangguan kepada sistem steering.
2.2 Pengertian Missile
Missile adalah suatu senjata proyektil yang memiliki suatu sistem petunjuk yang mengijinkannya untuk menyetir dan merubah haluan missile tersebut untuk menuju ke suatu target [5]. Dalam bahasa Indonesia, missile biasa disebut sebagai peluru kendali yang biasa disingkat dengan rudal.
Rudal sendiri biasanya terbagi menjadi 2 bagian yaitu bagian sistem petunjuk dan bagian pengontrol. Bagian petunjuk memiliki radar dan alat pemeroleh info lainnya, sedangkan bagian pengontrol bisa memiliki macam – macam pengontrol yang dapat mengatur posisi rudal.
Contoh rudal yang sederhana dijelaskan pada Gambar 2.1[8]:
Dari Gambar 2.1, seeker, steering computer, dan autopilot merupakan bagian dari sistem petunjuk dan untuk hydraulic actuators merupakan bagian dari sistem pengontrol.
Di dalam sistem petunjuk akan dilakukan perhitungan arah dari rudal dan target dan apa yang harus dilakukan oleh rudal. Lokasi target didapatkan oleh seeker dan kemudian akan diproses
7
di dalam steering computer. Setelah posisi didapatkan, steering computer akan memproses data dan mengoptimalkan posisi rudal agar dapat mencapai target, pengoptimalan dilakukan dengan menggunakan kontroler. Setelah steering computer melakukan perhitungan, maka autopilot akan menggerakan sistem pengontrol agar dapat mengarahkan rudal ke arah yang dituju.
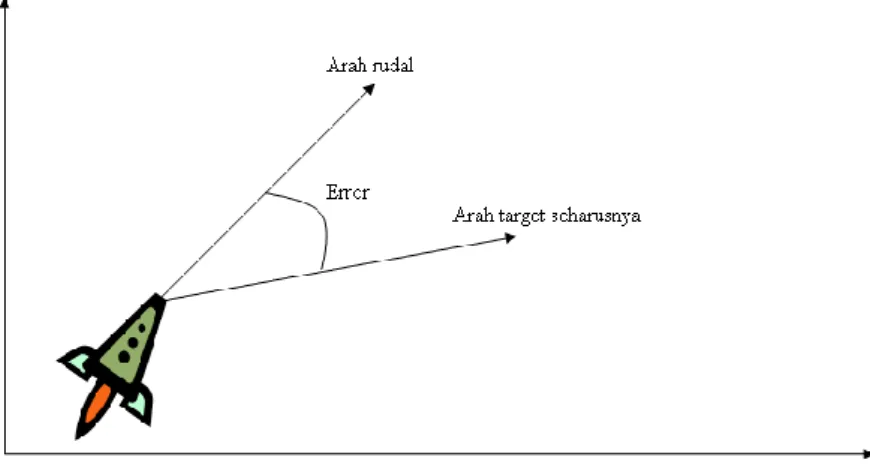
Misalkan, keadaan saat ini adalah seperti Gambar 2.2 [6] :
Gambar 2.2 Contoh kerja Missile
Kondisi ini akan dibaca oleh steering system dan kemudian akan ditentukan arah yang benar, kemudian steering system akan memberikan informasi kepada sistem pengontrol agar rudal diarahkan kembali menuju arah yang seharusnya. Untuk mendapatkan arah yang seharusnya, dibutuhkanlah suatu kontroler yang efektif agar mendapatkan arah yang sesuai.
2.3 Kontroler PID
2.3.1 Kontroler Proporsional (P)
Kontroler proporsional (P) memiliki sinyal keluaran sebanding dengan sinyal eror sistem. Artinya sinyal kontrol akan langsung merubah sinyal eror dikalikan dengan suatu konstanta
proporsionalnya. Persamaan kontroler proporsional adalah sebagai berikut[9]:
𝑢(𝑡) = 𝑘𝑝𝑒(𝑡) (2.1)
Kontroler proporsional memiliki nilai konstanta proporsional (𝑘𝑝) mempengaruhi cepatnya respon kontroler untuk mencapai nilai set point. Semakin besar nilai Kp maka respon akan semakin cepat, namun jika nilai Kp besar akan menyebabkan respon overshoot dan osilasi.
2.3.2 Kontroler Integral (I)
Kontroler integral (I) memiliki sinyal keluaran integral dari eror sistem. Dengan kata lain sinyal keluaran kontroler integral adalah luas bidang yang dibentuk oleh sinyal eror. Persamaan kontroler integral adalah sebagai berikut [9]:
𝑢(𝑡) = 𝑘𝑖∫ 𝑒(𝑡) 𝑑𝑡 = 𝑘𝑝𝜏1𝑖∫ 𝑒(𝑡) 𝑑𝑡 (2.2) Kontroler integral dapat mengeliminasi error steady state. Selain itu, kontroler integral responnya membutuhkan selang waktu tertentu sehingga terkesan memperlambat respon.
2.3.3 Kontroler Derivatif (D)
Kontroler derivatif memiliki sinyal keluaran hasil penurunan sinyal eror terhadap waktu. Karena sinyal berupa turunan maka pada saat peralihan nilai sinyal eror akan menyebabkan respon impuls sebagai respon kontrolnya. Pada implementasinya kontroler derivatif ini tidak pernah berdiri sendiri, dikarenakan saat eror tidak berubah (statis) kontroler ini tidak akan bereaksi. Persamaan kontroler derivatif adalah sebagai berikut [9]:
𝑢(𝑡) = 𝑘𝑑𝑑𝑡𝑑𝑒(𝑡) = 𝑘𝑝𝜏𝑑𝑑𝑡𝑑𝑒(𝑡) (2.3) Kontroler derivatif adalah kontroler yang tidak menghasilkan sinyal keluaran saat tidak ada sinyal eror. Selain itu kontroler ini adalah sifatnya yang responsif terhadap perubahan eror. Hal ini membuat kontroler derivatif dapat menambah kestabilan sistem.
9
2.3.4 Kontroler Proporsional, Integral, dan Derivatif Kontroler PID merupakan kombinasi dari kontroler proporsional (P), kontroler integral (I) dan kontroler derivatif (D). Dengan kombinasi ini kontroler memiliki sifat gabungan dari masing-masing kontroler. Persamaan kontroler PID adalah gabungan dari persamaan (2.1) hingga (2.3) [9]:
𝑢(𝑡) = 𝑘𝑝[𝑒(𝑡) +𝜏1
𝑖∫ 𝑒(𝑡) 𝑑𝑡 + 𝜏𝑑 𝑑 𝑑𝑡𝑒(𝑡)]
Aksi kontrol dari kontroler PID merupakan penjumlahan dari kontroler proporsional, integral, dan derivatif. Blok diagram dapat dilihat pada Gambar 2.3.
Gambar 2.3 Diagram Blok Kontroler PID
Sesuai dengan namanya, kontroler PID merupakan gabungan metode pengaturan yang terdiri dari kontroler proporsional, integral, dan derivatif yang masing-masing memiliki kegunaan, seperti yang tertera pada Tabel 2.1[9]:
Tabel 2.1 Sifat Kontroler PID
Aksi Rise Time Overshoot Settling Time
Kp naik Lebih Cepat Naik Turun*
Ki naik Lebih Cepat Naik Turun
Kd naik Lebih Cepat* Turun* Naik* Ket : *) mengalami perubahan yang kecil
2.4 Optimasi
Optimasi adalah salah satu tindakan untuk memperbaiki suatu nilai, suatu jadwal, suatu rute, atau apapun yang membutuhkan perbaikan sehingga mendapatkan nilai yang optimum. Optimasi kali ini akan dikerjakan untuk memperbaiki nilai kontroler PID.
Optimasi membutuhkan suatu indeks untuk menunjukkan hasil dari optimasinya, indeks tesebut biasa dinamakan dengan fungsi objektif. Berikut ini adalah fungsi objektif yang akan dipakai : RMSE = √𝑇1∫ 𝑒(𝑡)0𝑇 2𝑑𝑡 MSE = 1𝑇∫ 𝑒(𝑡)0𝑇 2𝑑𝑡 ITAE = ∫ 𝑡|𝑒(𝑡)|𝑑𝑡0𝑇 IAE = ∫ |𝑒(𝑡)|𝑑𝑡0𝑇 ISE = ∫ 𝑒(𝑡)0𝑇 2𝑑𝑡
dimana 𝑒(𝑡)adalah eror dari sistem terhadap waktu. 2.5 Algoritma Genetika
Dalam ilmu komputer, Algoritma Genetika adalah teknik pencarian untuk menemukan penyelesaian perkiraan untuk optimisasi dan masalah pencarian. Algoritma Genetika adalah kelas khusus dari algoritma evolusioner dengan menggunakan teknik yang terinspirasi oleh biologi evolusioner seperti pewarisan, mutasi, seleksi alam dan rekombinasi (atau crossover). Algoritma Genetika pertama kali dikembangkan oleh John Holland pada tahun 1970-an di New York, Amerika Serikat. Dia beserta murid-murid dan teman kerjanya menghasilkan buku berjudul "Adaption in Natural and Artificial Systems" pada tahun 1975[4].
Algoritma Genetika yang umum menyaratkan dua hal untuk didefinisikan, yaitu representasi genetika dari penyelesaian dan fungsi kemampuan untuk mengevaluasinya[4].
11
Gambar 2. 4 Diagram Alir Algoritma Genetika
Secara sederhana, algoritma umum dari Algoritma Genetika ini dapat dirumuskan menjadi 5 langkah seperti pada Gambar 2.4.
1.
Membentuk suatu populasi dengan keadaan acak sebagai populasi awal.2.
Mengevaluasi nilai kecocokan (nilai fitness) setiap individu dengan hasil yang diinginkan.3.
Memilih individu dengan kecocokan yang tinggi dan menyeleksi yang lain.4.
Bereproduksi, mengadakan persilangan antar individu terpilih diselingi mutasi.5.
Didapatkan populasi baru, kemudian ulangi langkah 2 - 4 sampai ditemukan individual dengan hasil yang diinginkan atau sampai batas iterasi yang ditentukan.2.5.1 Pendefinisan Genetika
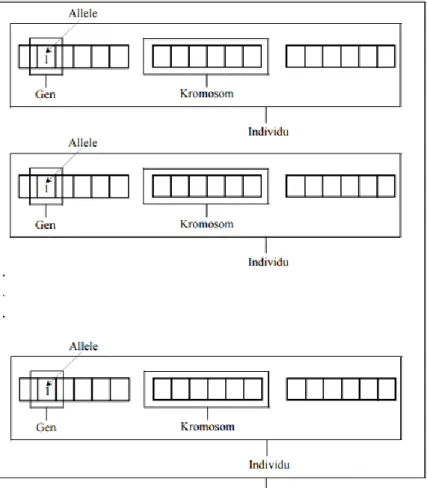
Dalam Algoritma Genetika, suatu individu menyatakan salah satu solusi yang mungkin. Individu bisa dikatakan sama dengan kromosom, yang merupakan kumpulan gen. Gen ini dapat berbentuk biner, float, dan kombinatorial[7].
Berikut ini beberapa definisi penting yang perlu diperhatikan dalam mendefinisikan individu untuk membangun penyelesaian persamaan dengan Algoritma Genetika[7] :
1. Genotype (Gen), sebuah nilai yang menyatakan satuan dasar yang membentuk suatu arti tertentu. Dalam Algoritma Genetika, gen ini bisa berupa biner, float, integer, maupun karakter, atau kombinatorial.
2. Allele, nilai atau isi dari gen.
3. Kromosom, gabungan dari gen – gen yang membentuk nilai tertentu.
4. Individu, suatu solusi (nilai atau keadaan) yang mungkin dari suatu permasalahan. Merupakan gabungan dari satu atau lebih kromosom.
5. Populasi, sekumpulan individu yang akan diproses bersama dalam satu siklus proses evolusi.
6. Generasi, menyatakan satu siklus proses evolusi atau satu iterasi di dalam Algoritma Genetika.
Dalam Algoritma Genetika, gen dapat direpresentasikan dalam berbagai macam bentuk : bit, bilangan real, daftar aturan, elemen permutasi, elemen program, atau representasi lainnya yang dapat diimplementasikan ke dalam operator Genetika. Dengan demikian, kromosom dapat direpresentasikan menggunakan :
1. String bit : 101011, 101111, dst. 2. Array bilangan rea : 32.31, 492.12 390.121 dst. 3. Elemen permutasi : E2, E10, E5, dst.
4. Daftar aturan : Rule1, Rule2, dst. 5. dsb.
13
Dalam Gambar 2.5, ditunjukkan ilustrasi dari representasi penyelesaian permasalahan dalam Algoritma Genetika.
Gambar 2.5 Ilustrasi Representasi Solusi dalam Algoritma Genetika
2.5.2 Inisialisasi
Inisialisasi atau pembangkitkan populasi awal adalah proses membangkitkan sejumlah individu secara acak atau melalui prosedur tertentu. Ukuran populasi biasanya ditentukan berdasarkan masalah yang akan diselesaikan atau operator Genetika yang digunakan, setelah ukuran populasi ditentukan, hal selanjutnya adalah menentukan populasi awal. Dikarenakan individu adalah solusi dari permasalahan, maka akan ada batasan – batasan dalam pembuatan individu.
Teknik pembangkitan populasi awal ada beberapa cara, diantaranya sebagai berikut [7]:
1. Random Generator
Inti dari teknik ini adalah membangkitkan populasi dengan nilai acak pada setiap gennya. Jika gen berbentuk biner, maka akan diacak dengan bentuk biner, jika gen berbentuk float, maka akan diacak dengan bentuk float, dsb.
2. Pendekatan Tertentu
Cara ini adalah dengan memasukkan nilai tertentu ke dalam gen dari populasi awal yang dibentuk.
3. Permutasi Gen
Teknik permutasi gen adalah suatu cara untuk mendapatkan nilai dari individu yang berbentuk permutasi, misalkan TSP. 2.5.3 Evaluasi
Evaluasi adalah tahap dimana setiap individu akan dicek kecocokannya sebagai solusi. Nilai tersebut bisa disebut dengan nilai fitness. Nilai ini dijadikan acuan dalam mencapai nilai optimal dalam Algoritma Genetika[7]. Algoritma Genetika sendiri akan mencari individu dengan nilai fitness terbaik.
Cara untuk mendapatakan nilai fitness berbeda tergantung dalam penyelesaian permasalahan suatu Algoritma Genetika. Misalnya : prosentase kecocokan, eror, total jarak, dsb.
15
2.5.4 Seleksi
Seleksi adalah tahap dimana populasi akan diseleksi berdasarkan nilai fitnessnya. Seleksi digunakan untuk memilih individu – individu mana saja yang akan dipilih untuk proses kawin silang (crossover) dan mutasi[7].
Seleksi sendiri digunakan agar hanya individu terbaik yang akan menjadi induk dalam populasi berikutnya. Ada banyak cara dalam menyeleksi individu, antara lain :
1. Seleksi dengan mesin roullete
Sesuai dengan namanya, mesin roullete, prinsip dari metode ini adalah membuat suatu algoritma yang menyerupai mesin roullete. Cara kerja mesin roullete antara lain[7]:
a. Dihitung nilai fitness setiap individu. b. Dihitung total nilai fitness.
c. Dihitung probabilitas masing – masing individu.
d. Dari probabilitas tersebut, dihitung jatah masing – masing individu pada angka 1 hingga 100.
e. Dibangkitan bilangan random dari 1 hingga 100.
f. Dari bilangan random tersebut, ditentukan individu mana yang terpilih dalam proses seleksi.
Ilustrasi jalannya metode mesin roullete dapat dilihat pada Gambar 2.6.
2. Seleksi dengan turnamen
Pada metode seleksi dengan turnamen, dibutuhkan beberapa kali turnamen yang mengikutkan beberapa individu (atau kromosom) yang dipilih secara acak dari suatu populasi. Pemenang dari setiap turnamen akan menjadi individu untuk tahap selanjutnya. Semakin besar peserta turnamen, semakin kecil kemungkinan menang untuk individu yang lemah (memiliki nilai fitness kecil) untuk memenangkan turnamen[11].
Gambar 2. 6 Ilustrasi seleksi mesin roullete 3. Seleksi dengan rank
Seleksi dengan rank adalah suatu metode alternatif yang bertujuan untuk tidak terjadinya konvergen yang terlalu cepat. Dalam versi yang diajukan oleh Baker (1985), setiap individu dalam populasi dirank berdasarkan fitnessnya. Langkah selanjutnya adalah dengan seleksi roullete[10].
4. Seleksi dengan elitism
Elitism, diperkenalkan pertama kali oleh Kenneth De Jong (1975). Elitism adalah tambahan dari macam – macam metode seleksi, dimana metode tersebut dipaksa agar menjaga beberapa individu terbaik di setiap generasinya. Individu ini mungkin hilang dalam operasi Genetika. Banyak peneliti menemukan
17
bahwa elitism memperbaiki performasi Algoritma Genetika secara signifikan[10].
2.5.5 Reproduksi
Reproduksi adalah tahap dimana populasi baru akan dibentuk berdasarkan populasi awal atau sebelumnya. Dalam Algoritma Genetika, reproduksi terbagi menjadi 2 operasi yaitu crossover dan mutasi.
2.4.5.1. Crossover
Crossover atau kawin silang adalah operator dari Algoritma Genetika yang melibatkan dua induk untuk membentuk kromosom / individu baru[7]. Kawin silang tidak dilakukan di semua individu, namun hanya beberapa yang memenuhi syarat. Induk yang tidak terkena crossover akan langsung diturunkan menjadi individu baru tersebut. Prinsip dari kawin silang ini adalah melakukan operasi pada gen-gen yang bersesuaian untuk mendapatkan individu baru[7]. Proses crossover dilakukan pada setiap individu dengan probabilitas crossover yang ditentukan.
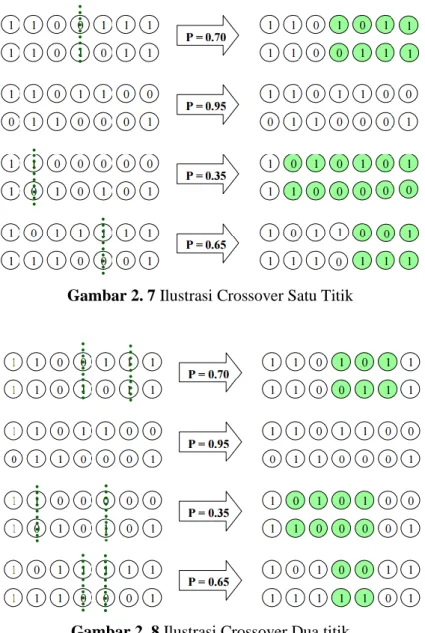
Berikut ini adalah macam – macam crossover : 1. Crossover satu titik
Teknik ini biasa dilakukan pada individu yang memiliki gen bernilai biner. Pada crossover satu titik, posisi crossover k diseleksi secara random. Variabel – variabel ditukar antar kromosom pada titik tersebut untuk menghasilkan anak[7]. Contoh crossover satu titik dapat dilihat di Gambar 2.7. Pada Gambar 2.7, probabilitas crossover = 0.9, sehingga untuk random yang dibawah 0.9 tidak terjadi crossover.
2. Crossover banyak titik
Sama halnya dengan crossover satu titik, teknik ini digunakan pada gen bertipe biner. Cara kerja crossover banyak titik sama dengan cara kerja crossover satu titik[7]. Contoh dengan probabilitas crossover = 0.9 ada pada Gambar 2.8 untuk 2 titik dan pada Gambar 2.9 untuk banyak titik.
Gambar 2. 7 Ilustrasi Crossover Satu Titik
19
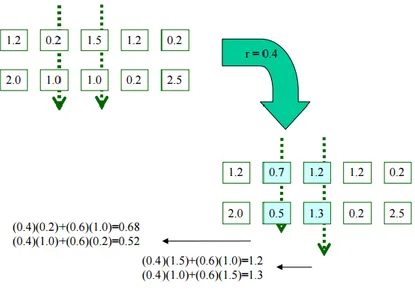
Gambar 2. 9 Ilustrasi Crossover lebih dari 2 titik 3. Crossover aritmatika
Crossover aritmatika digunakan untuk representasi kromosom berupa float (pecahan) [7]. Hal pertama dari operasi ini adalah menentukan bilangan random ‘r’ dari 0 hingga 1 yang akan digunakan sebagai nilai tukar. Operasi dari crossover ini adalah : 𝑥1′(𝑘) = 𝑟. 𝑥
1(𝑘) + (1 − 𝑟). 𝑥2(𝑘) 𝑥2′(𝑘) = 𝑟. 𝑥
2(𝑘) + (1 − 𝑟). 𝑥1(𝑘) dimana :
𝑥1′(𝑘) : kromosom baru dari induk 1, 𝑥2′(𝑘) : kromosom baru dari induk 2, 𝑥1(𝑘) : kromosom induk 1,
𝑥2(𝑘) : kromosom induk 2,
𝑟 : nilai random dari 0 hingga 1.
Contoh crossover aritmatika dengan r = 0.4 dapat dilihat pada Gambar 2.10.
4. Crossover untuk permutasi
Crossover untuk permutasi sedikit berbeda dikarenakan syarat dari individu itu sendiri. Berikut adalah macam – macam metode yang dipakai dalam crossover permutasi : partial-mapped crossover, order crossover, cycle crossover, dll. PMX (Partial-Mapped Crossover) adalah pindah silang antar 2 point, setelah dipindah, individu akan disesuaikan sehingga memenuhi syarat permutasi. OX (Order Crossover) adalah teknik yang merupakan variasi dari PMX, dsb.
Gambar 2. 10 Ilustrasi Crossover Aritmatika
2.4.5.2. Mutasi
Mutasi adalah salah satu operator dari reproduksi. Mutasi berperan untuk menggantikan gen yang hilang dari populasi akibat proses seleksi yang memungkinkan munculnya kembali gen yang tidak muncul dalam inisialisasi populasi awal[7].
Peluang mutasi didefinisikan sebagai jumlah total gen pada populasi yang mengalami mutasi. Peluang ini akan mengendalikan berapa banyak individu yang akan mengalami mutasi. Semakin besar nilai pulang maka populasi baru akan terbentuk semakin jauh dari nilai populasi induknya sebab akan semakin banya kromosom yang berubah menjadi nilai baru, sehingga populasi baru akan kehilangan kemiripan dari populasi sebelumnya. Jika peluangnya terlalu kecil, maka akan ada kemungkinan bahwa nilai yang berguna tidak pernah terevaluasi.
21
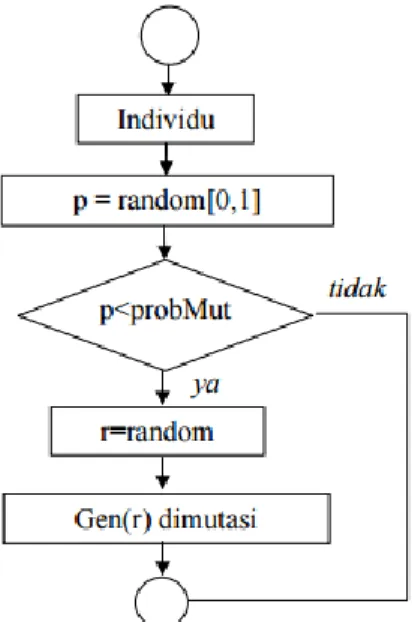
Berikut ini adalah diagram alir dari mutasi :
Gambar 2. 11 Diagram Alir Mutasi
Gambar 2.11 adalah salah satu cara melakukan mutasi. Ada banyak cara untuk melakukan mutasi. Proses yang lain bisa dengan melakukan mutasi pada gen sebanyak probabilitas mutasi dikalikan dengan jumlah gen, dimana posisi gen yang akan dilakukan mutasi dipilih secara acak [7].
1. Mutasi Biner
Cara sederhana untuk mendapatkan mutasi biner adalah dengan mengganti satu atau beberapa nilai gen dari kromosom. Langkah – langkah mutasi ini adalah [7] :
a. Hitung jumlah gen pada populasi.
b. Pilih secara acak gen yang akan dimutasi.
c. Tentukan kromosom dari gen yang terpilih untuk dimutasi. d. Ganti nilai gen (0 ke 1, atau 1 ke 0) dari kromosom yang akan
2. Mutasi Bilangan Real
Layaknya mutasi biner, mutasi bilangan real memiliki banyak cara untuk melakukan bisa dengan cara yang sama seperti mutasi biner pada Gambar 2.11, atau pun dengan cara yang lain. Jika seperti cara pada Gambar 2.11, nilai gen dapat diganti dengan 2 cara, yaitu merandom ulang nilai gen atau menambahkan nilai random pada nilai gen yang sebelumnya. 3. Mutasi Kromosom Permutasi
Mutasi untuk kromosom dengan nilai permutasi memiliki suatu permasalahan yaitu nilai kromosom yang berbentuk permutasi (tidak ada nilai yang sama untuk satu kromosom). Sehingga untuk permutasi, cara paling mudah adalah memilih satu nilai gen pada satu kromosom secara acak dan menukarnya dengan satu nilai lain pada kromosom tersebut.
23 BAB III METODOLOGI
Bab ini membahas mengenai metodologi yang digunakan untuk menyelesaikan Tugas Akhir. Pembahasan metodologi diawali dengan penjelasan tentang objek tahap penelitian.
3.1 Tahap Penelitian
Adapun prosedur penelitian yang digunakan dalam Tugas Akhir ini adalah sebagai berikut:
3.1.1 Studi Literatur
Pada tahap studi literatur dikaji beberapa literatur pendukung materi Tugas Akhir. Materi – materi yang akan dikaji adalah: a. Fungsi Transfer Rudal yang akan digunakan
b. Studi kontroler PID c. Studi optimisasi genetika
d. Studi Penggunaan Matlab beserta Simulink 3.1.2 Perancangan Sistem
Tahap perancangan sistem dibagi menjadi 2 tahap, yaitu:
a.
Identifikasi dan Pemodelan SistemIdentifikasi dan pemodelan sistem bertujuan untuk mengindentifikasi dan mendapatkan model matematika dari sistem kemudi rudal dan sistem kontroler PID.
b.
Perancangan Algoritma GenetikaTahap ini adalah tahap dimana Algoritma Genetika dirancang. Algoritma Genetika akan dibentuk dengan berbagai macam fitness.
3.1.3 Pengujian dan Analisis Sistem
Tahap pengujian dan analisis sistem bertujuan untuk menguji sistem kemudi rudal dan menganalisis respon yang dihasilkan oleh plant. Tahap pengujian dan analisis dilakukan dengan menguji model matematis plant kemudi rudal yang didapatkan dari
identifikasi sistem plant, kemudian dilakukan pengujian menggunakan Matlab R2013a. Respon keluaran sistem plant dari hasil simulasi kemudian dianalisis untuk mengetahui kesesuaian kontroler dengan plant.
3.1.4 Penyusunan Buku Tugas Akhir
Metode Penyusunan buku Tugas Akhir terdiri dari pendahuluan, teori penunjang, perancangan sistem, hasil simulasi, dan penutup.
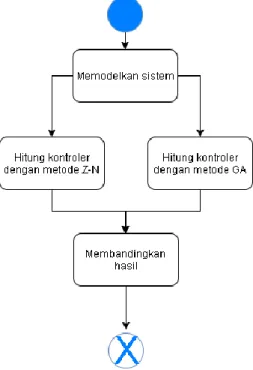
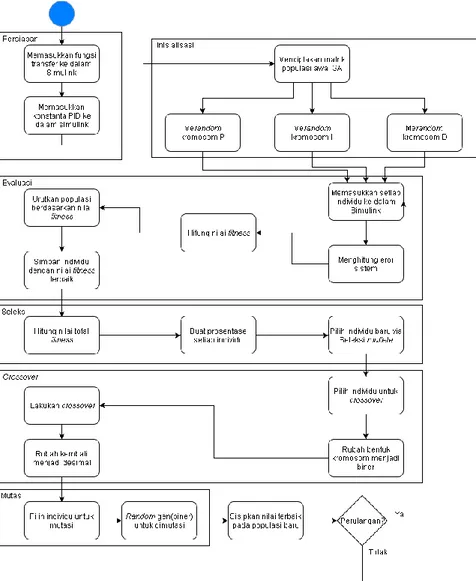
Tahap pengerjaan Tugas Akhir ini ada pada Gambar 3.1 dan diagram pengerjaan Algoritma Genetika ini ada pada Gambar 3.2.
25
27 BAB IV
PERANCANGAN DAN IMPLEMENTASI SISTEM Pada bab ini akan dibahas mengenai perancangan dan implementasi sistem dimulai dari pembahasan sistem kemudi missile, perancangan Simulink dan juga perakitan Algoritma Genetika yang dimulai dari inisialisasi hingga reproduksi.
4.1 Sistem Kemudi Missile
Ketinggian missile harus dikendalikan sehingga posisi missile yang sekarang dapat dimanipulasikan sedemikian rupa sehingga missile berada pada posisi yang diinginkan[2]. Oleh karena itu, agar posisi missile dapat dirubah sesuai dengan kehendak, maka digunakanlah suatu kontroler, dalam kasus kali ini adalah kontroler PID.
Kontroler PID digunakan pada sistem kemudi dengan kesatuan feedback system. Dengan artian sistem umpan balik ini yang akan memberikan feedback posisi sebenarnya yang dirasakan dan dapat memanipulasikan posisi[2].
4.1.1 Analisis Sistem Kemudi Missile
Dalam sistem kemudi missile yang sederhana, sistem kemudinya hanya terdiri dari actuators. Hydrolic actuators akan menggerakan sirip missile menuju posisi sirip yang seharusnya. Posisi sirip akan menentukan arah dari rudal tersebut.
Dengan menggunakan hukum kedua Newton, dimana percepatan dari suatu benda akan sebanding dengan jumlah gaya pada benda tersebut dan berbanding terbalik dengan masanya, berikut adalah hukum kedua Newton :
𝑚𝑎 = ∑ 𝐹 (4.1)
dimana : 𝑚 : massa, 𝑎 : percepatan, 𝐹 : gaya.
Dalam kasus kali ini, gaya akan didapatkan dari redaman dari kecepatan dan gaya pegas dari sirip, sehingga persamaan (4.1) menjadi : 𝑚𝑎 = −𝑐𝑣 − 𝑘𝑥 (4.2) dimana : 𝑐 : konstanta damping, 𝑣 : kelajuan, 𝑘 : konstanta kekakuan, 𝑥 : posisi sirip.
Untuk mempercepat sampainya sirip pada posisi yang seharusnya, perlu ditambahkan suatu gaya, anggap gaya tersebut adalah 𝑢, maka persamaan (4.2) menjadi :
𝑚𝑎 = −𝑐𝑣 − 𝑘𝑥 + 𝑘𝑢 𝑚𝑎 𝑚 = − 𝑐𝑣 𝑚− 𝑘𝑥 𝑚 + 𝑘𝑢 𝑚 𝑎 = −𝑐 𝑚𝑣 − 𝑘 𝑚𝑥 + 𝑘 𝑚𝑢 (4.3)
Natural frequency atau frekuensi alami atau frekuensi pribadi, adalah frekuensi dimana sistem akan cenderung berosilasi dalam keadaan tanpa kemudi atau gaya peredam. Frekuensi alami ini dirumuskan dalam bentuk :
𝜔𝑛 = √𝑘
𝑚 (4.4)
dimana :
𝜔𝑛 : natural frequency
Damping ratio adalah perbandingan antara konstanta damping dengan critical damping, sehingga persamaannya : 𝜉 = 𝑐 𝑐𝑐 𝑐 = 𝜉𝑐𝑐 (4.5) dimana : 𝜉 : damping ratio 𝑐𝑐 : critical damping
Critical damping adalah damping paling optimum, sehingga merupakan damping yang membuat sistem menuju nol dengan waktu tercepat. Berikut adalah persamaan critical damping :
29
𝑐𝑐 = 2√𝑘𝑚 𝑐𝑐 = 2𝑚√𝑚𝑘
𝑐𝑐 = 2𝜔𝑛𝑚 (4.6)
Dengan menggabungkan persamaan (4.3) hingga (4.6), didapatkan : 𝑎 = −𝑐 𝑚𝑣 − 𝑘 𝑚𝑥 + 𝑘 𝑚𝑢 𝑎 = −2𝜉𝜔𝑛𝑚 𝑚 𝑣 − 𝜔𝑛2𝑥 + 𝜔𝑛2𝑢 𝑎 = −2𝜉𝜔𝑛𝑣 − 𝜔𝑛2𝑥 + 𝜔𝑛2𝑢 (4.7) Misalkan 𝑥1= 𝑥 sebagai posisi, 𝑥2= 𝑥̇1= 𝑣 sebagai kecepatan, dan 𝑥̇2= 𝑎 sebagai percepatan. Sehingga persamaan (4.7) menjadi :
𝑥̇2 = −2𝜉𝜔𝑛𝑥2− 𝜔𝑛2𝑥
1+ 𝜔𝑛2𝑢 (4.8)
Dengan 𝑥2= 𝑥̇1 dan persamaan (4.8) dapat diambil bentuk state space sebagai berikut :
[𝑥̇𝑥̇1 2] = [ 0 1 −𝜔𝑛2 −2𝜉𝜔 𝑛] [ 𝑥1 𝑥2] + [ 0 𝜔𝑛2] 𝑢 (4.9)
Karena yang akan diamati sebagai output adalah posisi sirip dari missile, maka dapat dikatakan bahwa bentuk persamaan output sebagai berikut :
[𝑦] = [1 0] [𝑥𝑥1
2] (4.10)
Persamaan (4.9) dan (4.10) membuat suatu kesatuan state space yang lengkap, sehingga daapt diambil bahwa fungsi alih atau transfer function dari sistem berbentuk :
𝐺𝐷(𝑠) = 𝐶[𝐼𝑠 − 𝐴]−1𝐵 + 𝐷 𝐺𝐷(𝑠) = [1 0] [[1 00 1] 𝑠 − [−𝜔0 1 𝑛2 −2𝜉𝜔𝑛]] −1 [𝜔0 𝑛2] 𝐺𝐷(𝑠) = [1 0] [[𝑠 00 𝑠] − [−𝜔0 1 𝑛2 −2𝜉𝜔𝑛]] −1 [𝜔0 𝑛2] 𝐺𝐷(𝑠) = [1 0] [[𝜔𝑠 −1 𝑛2 𝑠 + 2𝜉𝜔𝑛]] −1 [𝜔0 𝑛2]
𝐺𝐷(𝑠) = [1 0] 1 (𝑠)(𝑠 + 2𝜉𝜔𝑛) − (−1)(𝜔𝑛2)[ 𝑠 + 2𝜉𝜔𝑛 1 −𝜔𝑛2 𝑠] [ 0 𝜔𝑛2] 𝐺𝐷(𝑠) = 1 𝑠2+ 2𝜉𝜔 𝑛𝑠 + 𝜔𝑛2 [1 0] [𝑠 + 2𝜉𝜔−𝜔 𝑛 1 𝑛2 𝑠] [ 0 𝜔𝑛2] 𝐺𝐷(𝑠) = 1 𝑠2+ 2𝜉𝜔 𝑛𝑠 + 𝜔𝑛2 [𝑠 + 2𝜉𝜔𝑛 1] [𝜔0 𝑛2] 𝐺𝐷(𝑠) = 1 𝑠2+ 2𝜉𝜔 𝑛𝑠 + 𝜔𝑛2 [𝜔𝑛2] 𝐺𝐷(𝑠) = 1 1 𝜔𝑛2𝑠 2+ 1 𝜔𝑛2𝜉𝑠 + 1
dimana :
𝐺𝐷(𝑠) : Transfer function sistem kemudi missile 4.1.2 Plant Simulink
Dengan mengambil nilai 𝜔1
𝑛 = 0.01 dan 𝜉 = 0.7 maka akan
didapatkan bahwa[1] : 𝐺𝐷(𝑠) = 1 (0.01)2 𝑠2+ 0.01 ∗ (2 ∗ 0.7)𝑠 + 1 𝐺𝐷(𝑠) = 1 0.0001 𝑠2+ 0.014𝑠 + 1
Setelah itu, dibangun model dalam Simulink dengan menggunakan fungsi alih di atas dan dengan kontroler PID.
31
Bentuk model seperti pada Gambar 4.1 :
Gambar 4. 1 Plant Sistem dengan Kontroler PID 4.2 Algoritma Genetika
Algoritma Genetika akan digunakan untuk mendapatkan nilai kontroler PID, nilai kontroler didapat dengan dilakukan iterasi berkali – kali.
4.2.1 Perumusan Kromosom
Individu menyatakan satu solusi yang mungkin. Individu sendiri dapat dikatakan sebagai kromosom, yang merupakan kumpulan gen. Gen ini dapat berisi biner, integer, float, double, karakter, atau bahkan kombinatorial[7].
Dalam penelitian kali ini, gen akan berisi nilai biner, yaitu nilai biner dari nilai kontroler P, nilai kontroler I, dan nilai kontroler D, dan satu individu terdiri dari 3 kromosom (pasangan nilai P, nilai I, dan nilai D) dan individu tersebut merupakan solusi dari permasalahan yang ada dalam penelitian kali ini.
Secara garis besar, perumusan kromosom secara lengkap ada pada Gambar 4.2.
4.2.2 Inisialisasi
Inisialisasi adalah tahap dimana populasi awal akan ditentukan. Ada beberapa teknik untuk mendapatkan populasi awal antara lain : Random Generator, Pendekatan Tertentu, dan Permutasi Gen.[7]
Dalam penelitian kali, Inisialisasi akan menggunakan Random Generator. Random Generator akan membuat nilai P, nilai I, dan nilai D secara random. Nilai P akan dirandom dari Gambar 4. 2 Ilustrasi Representasi Penyelesaian Permasalahan
Dalam Algoritma Genetika N i l a i P N i l a i P N i l a i P N i l a i P
Nilai P Nilai I Nilai D
Kromosom
Nilai P Nilai I Nilai D Nilai P Nilai I Nilai D
Nilai P Nilai I Nilai D Individu Populasi Nilai N i l a i P Gen
33
nilai 0 hingga 1001, nilai I dirandom dari 0 hingga 1001, dan nilai D akan dirandom dari nilai 0 hingga 11.
Source Code: for k=1:Populasi POP(k,1)=rand(1,1)+randint(1,1,[0,1000]); POP(k,2)=rand(1,1)+randint(1,1,[0,1000]); POP(k,3)=rand(1,1)+randint(1,1,[0,10]); end; 4.2.3 Evaluasi
Evaluasi adalah tahap dimana setiap individu dalam populasi akan diperiksa fitnessnya dengan target yang diinginkan, dengan kata lain, semakin dia memenuhi syarat output yang diinginkan maka nilai fitnessnya akan semakin bagus.
Dalam penelitian kali ini, nilai fitness akan ditentukan berdasarkan indeks performasi dari sistem. Indeks performasi akan diambil dengan berbagai cara yaitu : RMSE, MSE, ITAE, IAE, dan ISE.
Setelah didapatkan indeks performasinya, nilai fitness akan didapatkan dengan cara :
𝑛𝑖𝑙𝑎𝑖 𝑓𝑖𝑡𝑛𝑒𝑠𝑠 = 1
𝑖𝑛𝑑𝑒𝑘𝑠 𝑝𝑒𝑟𝑓𝑜𝑟𝑚𝑎𝑠𝑖
Sedangkan indeks performasinya antara lain : RMSE = √𝑇1∫ 𝑒(𝑡)0𝑇 2𝑑𝑡
MSE = 1𝑇∫ 𝑒(𝑡)0𝑇 2𝑑𝑡 ITAE = ∫ 𝑡|𝑒(𝑡)|𝑑𝑡0𝑇 IAE = ∫ |𝑒(𝑡)|𝑑𝑡0𝑇 ISE= ∫ 𝑒(𝑡)0𝑇 2𝑑𝑡
Namun, karena data yang didapat berupa diskrit, maka fungsi indeks performasi akan dirubah menjadi :
RMSE = √1𝑇∑ 𝑒(𝑡)𝑇0 2𝑑𝑡 MSE = 𝑇1∑𝑇0𝑒(𝑡)2𝑑𝑡 ITAE = ∑ 𝑡|𝑒(𝑡)|𝑑𝑡𝑇0 IAE = ∑𝑇𝑡|𝑒(𝑡)|𝑑𝑡 0 ISE = ∑ 𝑒(𝑡)𝑇0 2𝑑𝑡
Setelah semua nilai fitness didapatkan, setiap individu akan diurutkan berdasarkan nilai fitnessnya.
4.2.4 Seleksi
Seleksi adalah tahap dimana populasi akan diseleksi berdasarkan nilai fitnessnya. Seleksi digunakan untuk memilih individu – individu mana saja yang akan dipilih untuk proses kawin silang (crossover) dan mutasi[7].
Seleksi sendiri digunakan agar hanya individu terbaik yang akan menjadi induk dalam populasi berikutnya. Ada banyak cara dalam menyeleksi individu, dalam penelitian kali ini akan digunakan seleksi dengan cara mesin roullete.
Selain itu, akan ditambahkan metode elitism yang akan membuat Algoritma Genetika untuk menyimpan satu nilai terbaiknya dan akan diturunkan ke dalam generasi selanjutnya. Source code : [c d]=size(POP1); total = sum(POP1(:,4)); for i=1:c persentasi(i) = POP1(i,4)*100/total; end;
%Rekontruksi dengan Mesin Roullet
b=randint(1,c,[0,99])+rand(1,1); for i=1:c
j = 1;
x = b(i) - persentasi(j); while x>0 && j<=c
35 j = j+1; x = x - persentasi(j); end; POP2(i,:)=POP1(j,:); end; 4.2.5 Reproduksi
Reproduksi adalah tahap dimana populasi baru akan dibentuk berdasarkan populasi awal atau sebelumnya. Dalam Algoritma Genetika, reproduksi terbagi mejadi 2 tugas yaitu crossover dan mutasi.
4.2.5.1 Crossover
Crossover atau kawin silang adalah operator dari Algoritma Genetika yang melibatkan dua induk untuk membentuk kromosom atau individu baru[7]. Kawin silang tidak dilakukan di semua individu, namun hanya beberapa yang memenuhi syarat. Induk yang tidak terkena crossover akan langsung diturunkan menjadi individu baru tersebut.
Prinsip dari kawin silang ini adalah melakukan operasi (dalam hal ini operasi aritmatika) pada gen-gen yang bersesuaian untuk mendapatkan individu baru[7]. Proses crossover dilakukan pada setiap individu dengan probabilitas crossover yang ditentukan.
Crossover yang digunakan dalam pengerjaaan penelitian kali ini adalah crossover di banyak titik. Kromosom P, kromosom I, dan kromosom D akan dirubah menjadi biner terlebih dahulu sebelum dioperasikan. Jumlah dan posisi cut point yang digunakan akan di-random. Kromosom P induk 1 akan di-crossover dengan kromosom P induk 2. Begitu juga untuk kromosom I dan kromosom D. Setelah setiap kromosom dirubah menjadi biner, kromosom – kromosom yang akan mengalami crossover akan disamakan panjangnya sebelum dilakukan crossover. Source code crossover dapat dilihat pada Lampiran 2.
4.2.5.2 Mutasi
Mutasi adalah salah satu operator dari reproduksi. Mutasi berperan untuk menggantikan gen yang hilang dari populasi akibat proses seleksi yang memungkinkan munculnya kembali gen yang tidak muncul dalam inisialisasi populasi awal[7].
Peluang mutasi didefinisikan sebagai presentasi dari jumlah total gen pada populasi yang mengalami mutasi. Peluang ini akan mengendalikan berapa banyak individu yang akan mengalami mutasi. Semakin besar nilai peluang maka populasi baru akan terbentuk semakin jauh dari nilai populasi induknya sebab akan semakin banyak kromosom yang berubah menjadi nilai baru, sehingga populasi baru akan kehilangan kemiripan dari populasi sebelumnya. Dan jika peluangnya terlalu kecil, maka akan ada kemungkinan bahwa nilai yang berguna tidak pernah terevaluasi.
Dalam penelitian kali ini, mutasi dilakukan dengan cara diatas. Dengan 𝑟 akan diambil sebanyak 1 hingga sejumlah gen dalam 1 kromosom. Source code : for i=1:a; for j=1:b; rmut = rand(1,1); if rmut < Mutasi if j==1 POP4(i,j)=rand(1,1)+randint(1,1,[0,1000]); elseif j==2 POP4(i,j)=rand(1,1)+randint(1,1,[0,1000]); else POP4(i,j)=rand(1,1)+randint(1,1,[0,10]); end; end; end; end; 4.3 Interface
Interface atau tatap muka adalah penghubung dari suatu aplikasi dengan user. Interface sendiri digunakan untuk
37
mempermudah pengguna pihak ketiga dalam penggunaan suatu program atau aplikasi.
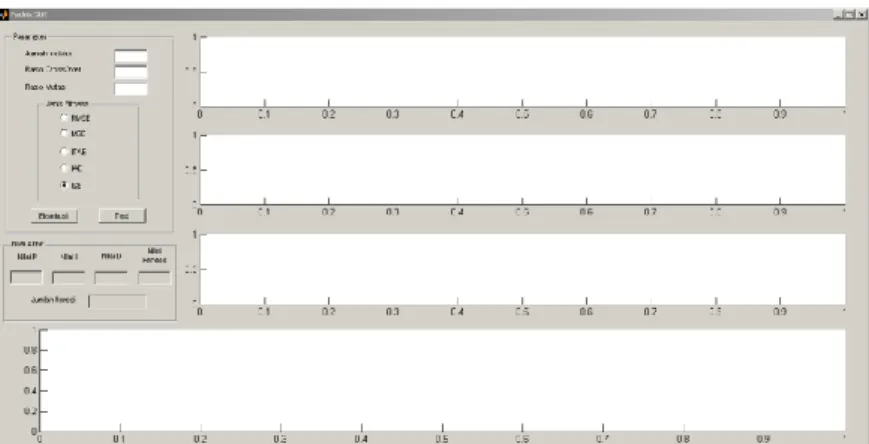
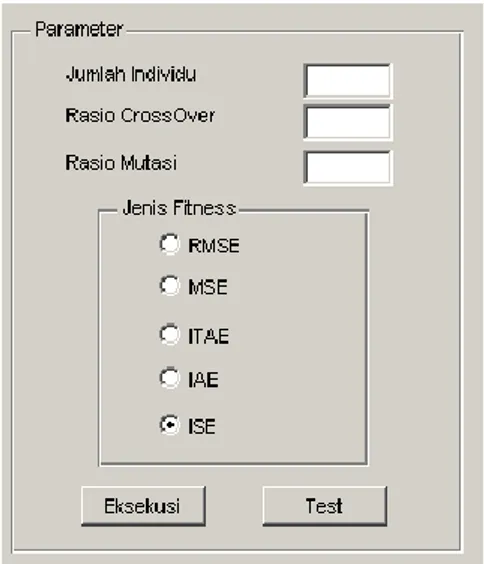
Dalam pengerjaan penelitian kali ini, interface tebagi menjadi 2 sub yaitu, form Algoritma Genetika pada Gambar 4.3 dan form test sistem pada Gambar 4.6. Dalam bagian form Algoritma Genetika, terdapat 3 bagian. Bagian pertama adalah input parameter, pada Gambar 4.4, user dapat memasukan nilai dari setiap parameter yang ada, mulai dari jumlah individu dalam suatu populasi ke dalam textbox ‘jumlah individu’, jumlah generasi untuk satu kali pengerjaan kedalam textbox ‘jumlah iterasi’, kemudian rasio crossover, dan juga rasio mutasi. Selain itu user juga memilih untuk menggunakan Indeks performasi yang digunakan dalam pengerjaan tersebut. Mulai dari RMSE, MSE, ITAE, IAE, dan juga ISE. Terdapat 2 tombol, yaitu tombol eksekusi dan tombol test. Untuk memulai Algoritma Genetika, tombol eksekusi yang akan ditekan, untuk mengetes nilai kontroler, tombol test yang harus ditekan.
Gambar 4. 4 Parameter GA
Bagian selanjutnya adalah bagian grafik, dalam bagian grafik terdapat 4 axes. Setiap axes akan digunakan untuk menampung grafik. Secara berurutan, grafik yang muncul dalam axes adalah grafik nilai terbaik P, grafik nilai terbaik I, grafik nilai terbaik D, dan grafik nilai indeks performasi terbaik.
Setelah iterasi berakhir, dalam bagian nilai akhir seperti pada Gambar 4.5, akan muncul nilai P terbaik, I terbaik, dan D terbaik, beserta jumlah iterasi yang terjadi. Dan langkah selanjutnya adalah menekan tombol test pada bagian input parameter.
39
Ketika tombol test ditekan, applikasi akan menuju ke layer berikutnya, yaitu interface untuk test sistem. Interface ini berisi 3 hal, yaitu bagian parameter PID pada Gambar 4.7, axes untuk menunjukkan grafik, dan bagian hasil pada Gambar 4.8.
Gambar 4. 6 Interface Test Sistem
41
BAB V
PENGUJIAN DAN PEMBAHASAN
Pada bab ini akan dilakukan pengujian serta pembahasan terhadap program yang telah dibuat. Pengujian sistem ini merupakan pengujian Algoritma Genetika terhadap sistem kemudi missile yang telah dijelaskan di bab sebelumnya. Hasil dari sistem ini adalah nilai kontroler Proporsional, nilai kontroler Integral, dan nilai kontroler Derivatif terbaik berdasarkan nilai fitnessnya. Selain itu, metode osilasi Z-N juga digunakan guna mendapatkan nilai P, nilai I, dan nilai D. Setelah didapat nilai kontroler PIDnya, akan dilakukan perbandingan nilai kontrolernya terhadap rising time, peak time, maximum overshoot, dan settling time.
5.1. Optimasi Menggunakan Metode Z-N
Proses ini adalah proses dimana nilai kontroler P, nilai kontroler I, dan nilai kontroler D didapatkan melalui SISO tool milik Matlab. Hal pertama yang dilakukan adalah menginputkan bentuk fungsi alih sistem. Dan kemudian dengan fungsi tersebut, kita jalankan SISO tool.
Dengan fungsi yang telah dijelaskan di atas, kita ambil automated tuning dengan design PID tuning. Pilih controller type : PID dan formula Z-N untuk step response sebab fungsi yang dipakai adalah fungsi dengan orde 2. Setelah di-run, maka akan muncul fungsi alih compensator seperti Gambar 5.1.
Dengan fungsi alih tersebut, didapatkan :
𝐺𝑐(𝑠) = 0.00834𝑠2+ 5.06𝑠 + 766.68 𝑠
𝐾𝑃= 5.06 𝐾𝐼= 766.68 𝐾𝐷= 0.00834
Gambar 5.1 PID Tuning dengan SISO tool
Setelah itu, masukan fungsi alih kompesator ke dalam plant Simulink matlab, sehingga akan seperti Gambar 5.2 :
Gambar 5.2 Plant Sistem dengan Compesator
Kedua fungsi alih dioperasikan lebih lanjut hingga didapatkan kesatuan feedback sistem. Gambar 5.3 menunjukkan fungsi alih sistem baru dengan scope sebagai output.
43
5.2. Optimasi Menggunakan Algortima Genetika
Proses ini akan bertujuan untuk mendapatkan nilai kontroler P, kontroler I, dan kontroler D dengan Algoritma Genetika. Proses ini akan dilakukan dengan menggunakan jumlah individu sebanyak 30, jumlah iterasi sebanyak 100, rasio seleksi 0.5, rasio crossover 0.3, dan rasio mutasi 0.1. Selain itu, Algoritma Genetika akan dijalankan dengan menggunakan 5 jenis fitness, yaitu dengan berdasarkan RMSE, MSE, ITAE, IAE, dan ISE. Berikut adalah parameter Algoritma Genetika yang dipakai :
Tabel 5. 1 Parameter Algoritma Genetika
Parameter GA MetodeatauNilai
Ukuran Populasi 30
Batas Variabel[𝐾𝑃, 𝐾𝐼, 𝐾𝐷] ([0:1001], [0:1001], [0:11])
Batas Generasi Konvergensi 90%
Metode Seleksi Roulette with elitism Metode Crossover Multi-point Crossover
Metode Mutasi Uniform Mutation
Rasio Crossover 0.1, 0.3, 0.5
Rasio Mutasi 0.1
Indeks Performasi atau Fungsi Fitness
RMSE, MSE, ITAE, IAE, ISE
Dengan menggunakan parameter di Tabel 5.1, kita akan mendapatkan nilai – nilai parameter berdasarkan indeks performasi masing – masing. Nilai indeks performasi atau fungsi fitness akan berubah tiap generasi, seperti pada Gambar 5.4 dan Gambar 5.5. Dalam Gambar 5.4 terjadi perubahan nilai indeks performasi mulai dari generasi 0 hingga generasi ke-100. Terdapatnya naik turun dari nilai indeks disebabkan karena didalam kinerja Algoritma Genetika yang digunakan, tidak dilakukan penjagaan nilai fitness terbaik. Sedangkan pada Gambar 5.5, metode seleksi yang digunakan mendapat tambahan metode elitism sehingga tidak terjadi turunnya nilai fitness di setiap iterasinya.
Gambar 5. 4 Nilai Fitness Terbaik Tanpa Elitism
Dalam Gambar 5.4, dapat dilihat bahwa nilai indeks performasi mulai menunjukkan hasil yang hampir sama mulai dari iterasi ke-36.
Gambar 5. 5 Nilai Fitness Terbaik dengan Elitism Dalam Gambar 5.5 dapat dilihat bahwa nilai indeks performasi menjadi tetap pada saat iterasi ke-20. Waktu yang digunakan untuk melakukan 1 kali iterasi dengan banyak individu dalam satu populasi 30 adalah sekitar 1.4 detik.
Pengerjaan kali akan menggunakan batas generasi adalah konvergensi 90%, artinya ketika 90% individu memiliki nilai yang hampir sama atau konvergen ke satu nilai, iterasi berhenti. Tabel 5.2 menunjukkan hasil terbaik untuk setiap fungsi objektif dari running program. Untuk data lebih lengkap dapat dilihat di Lampiran 1.
Tabel 5. 2 Nilai Terbaik Setiap Fungsi Objektif Fungsi
Objektif
Nilai P Nilai I Nilai D Nilai Fitness Iterasi RMSE 1622.032 785.0411 0.5553 31.6364 145 MSE 1433.32 1184.799 0.5104 1000.868 56 ITAE 214.064 572.0586 0.3486 374.8229 184 IAE 1564.269 0.4104 0.7525 0.5727 * ISE 618.8938 1.7033 0.2321 0.995 120 Ket : *) diberhentikan manual, lebih dari 2 hari.
45
5.3. Analisis Hasil Metode Z-N
Dengan fungsi alih yang telah diperbaharui, didapatkan bahwa bentuk output dari sistem adalah seperti Gambar 5.6.
Gambar 5. 6 Output Plant dengan Compensator
Pada Gambar 5.6, dapat dilihat bahwa sistem akan menuju dari 0% hingga 90% dalam waktu 0.0073 detik, dan mencapai puncak osilasinya pada saat 0.0143 detik. Rentang osilasi terbesar yang didapatkan dari keluaran sistem tersebut adalah 61.593% dari set point yang ditentukan. Sistem mulai masuk dalam keadaan stabil saat 0.0863 detik. Secara garis besar, hasil dapat dilihat pada Tabel 5.3.
Tabel 5. 3 Nilai Output Plant dengan Compensator
Parameter Nilai
Rise Time 0.0073 detik
Peak Time 0.0143 detik
Maximum Overshoot 61.593%
5.4. Analisis Hasil Algoritma Genetika
Berikut ini adalah hasil dari pemasukan nilai kontroler P, nilai kontroler I, dan nilai kontroler D pada model awal.
5.4.1. Analisis Hasil GA Menggunakan RMSE
Dengan fungsi alih missile dan dengan parameter PID terbaik yang didapat melalui optimasi dengan RMSE , didapatkan output sistem seperti pada Gambar 5.7.
Gambar 5. 7 Output Plant GA menggunakan RMSE Pada Gambar 5.7, dapat dilihat bahwa sistem akan menuju dari 0% hingga 90% dalam waktu 0.0008 detik, dan mencapai puncak osilasinya pada saat 0.0012 detik. Rentang osilasi terbesar yang didapatkan dari keluaran sistem tersebut adalah 2.1264% dari set point yang ditentukan. Sistem mulai masuk dalam keadaan stabil saat 0.0009 detik. Secara garis besar, hasil dapat dilihat pada Tabel 5.4.
47
Tabel 5. 4 Nilai Output Plant GA menggunakan RMSE
Parameter Nilai
Rise Time 0.0008 detik
Peak Time 0.0012 detik
Maximum Overshoot 2.1264%
Settling Time 0.0009 detik
5.4.2. Analisis Hasil GA Menggunakan MSE
Dengan fungsi alih missile dan dengan parameter PID terbaik berdasarkan MSE, didapatkan output sistem seperti pada Gambar 5.8.
Gambar 5. 8 Output Plant GA menggunakan MSE Pada Gambar 5.8, dapat dilihat bahwa sistem akan menuju dari 0% hingga 90% dalam waktu 0.0008 detik, dan mencapai puncak osilasinya pada saat 0.0013 detik. Rentang osilasi terbesar yang didapatkan dari keluaran sistem tersebut adalah 2.6992% dari set point yang ditentukan. Sistem mulai masuk dalam keadaan stabil saat 0.0009 detik. Secara garis besar, hasil dapat dilihat pada Tabel 5.5.
Tabel 5. 5 Nilai Output Plant GA menggunakan MSE
Parameter Nilai
Rise Time 0.0008 detik
Peak Time 0.0013 detik
Maximum Overshoot 2.6992%
Settling Time 0.0009 detik
5.4.3. Analisis Hasil GA dengan ITAE
Dengan fungsi alih missile dan dengan parameter PID terbaik berdasarkan ITAE, didapatkan output sistem seperti pada Gambar 5.9.
Gambar 5. 9 Output Plant GA menggunakan ITAE Pada Gambar 5.9, dapat dilihat bahwa sistem akan menuju dari 0% hingga 90% dalam waktu 0.0037 detik, dan mencapai puncak osilasinya pada saat 0.01 detik. Sistem ini tidak menghasilkan osilasi dan sistem mulai masuk dalam keadaan stabil saat 0.0047 detik. Secara garis besar, hasil dapat dilihat pada Tabel 5.6.
49
Tabel 5. 6 Nilai Output Plant GA menggunakan ITAE
Parameter Nilai
Rise Time 0.0037 detik
Peak Time 0.01 detik
Maximum Overshoot -
Settling Time 0.0047 detik
5.4.4. Analisis Hasil GA dengan IAE
Dengan fungsi alih missile dan dengan parameter PID terbaik berdasarkan IAE didapatkan output sistem seperti pada Gambar 5.10.
Gambar 5. 10 Output Plant GA menggunakan IAE Pada Gambar 5.10, dapat dilihat bahwa sistem akan menuju dari 0% hingga 90% dalam waktu 0.0011 detik, dan mencapai puncak osilasinya pada saat 0.0025 detik. Sistem ini tidak menghasilkan osilasi dan sistem mulai masuk dalam keadaan stabil saat 0.0014 detik. Secara garis besar, hasil dapat dilihat pada Tabel 5.7.
Tabel 5. 7 Nilai Output Plant GA menggunakan IAE
Parameter Nilai
Rise Time 0.0011 detik
Peak Time 0.0025 detik
Maximum Overshoot -
Settling Time 0.0014 detik
5.4.5. Analisis Hasil GA dengan ISE
Dengan fungsi alih missile dan dengan parameter PID terbaik berdasarkan ISE, didapatkan output sistem seperti pada Gambar 5.11
Gambar 5. 11 Output Plant GA menggunakan ISE Pada Gambar 5.11, dapat dilihat bahwa sistem akan menuju dari 0% hingga 90% dalam waktu 0.001 detik, dan mencapai puncak osilasinya pada saat 0.0015 detik. Rentang osilasi terbesar yang didapatkan dari keluaran sistem tersebut adalah 15.1749% dari set point yang ditentukan. Sistem mulai masuk dalam keadaan stabil saat 0.0022 detik. Secara garis besar, hasil dapat dilihat pada Tabel 5.8.