METODOLOGI PENELITIAN
Waktu dan Lokasi Penelitian
Penelitian dilaksanakan mulai bulan November 2003 sampai dengan Juni 2004
di Kecamatan Rengasdengklok, Telagasari dan Cilamaya Kabupaten Karawang – Jawa
Barat dan di Laboratorium Lapang Departemen Teknik Pertanian – Fakultas Teknologi
Pertanian, IPB. Pengambilan data di Kecamatan Rengasdengklok dan Telagasari
dilakukan untuk penggunaan implemen satu (gelebeg) dan di Kecamatan Cilamaya
untuk penggunaan implemen dua (rotari), sedangkan perancangan dan uji coba
pemasangan alat ukur (vibration meter) dilakukan di Laboratoium Lapang.
Peralatan Penelitian
Peralatan yang digunakan dalam penelitian ini adalah : (1) Traktor tangan dan implemen (gelebeg dan rotari), (2) Anthropolometer, (3) Heart rate monitor (4) Vibration meter, (5) Sound level meter, (6) Komputer, (7) Termometer, (8) Meteran (tape) dan (9) Tachometer.
Pengambilan Data dan Analisis
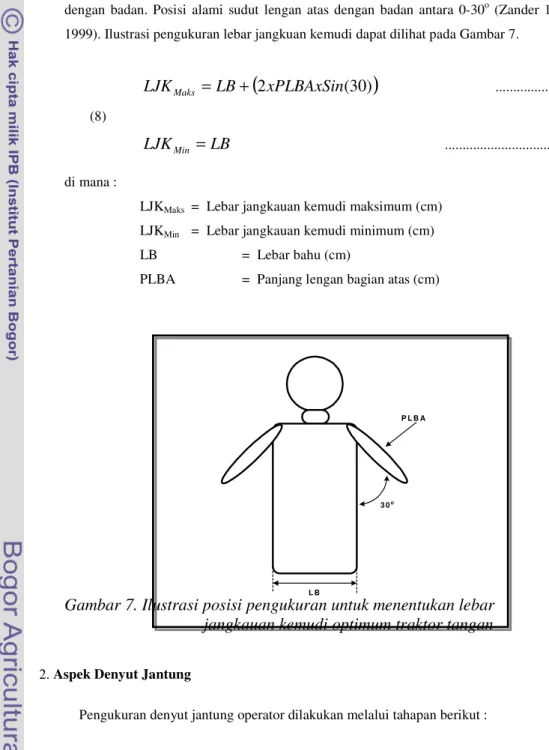
Pengambilan data dan analisis secara skematis ditampilkan pada Gambar 5. Pengambilan data dilakukan pada dua jenis penggunaan implemen pengolahan tanah pertama yang berbeda (berdasarkan kebiasaan yang berlaku di daerah penelitian), yaitu pengolahan tanah dengan menggunakan gelebeg dan rotari yang dibagi menjadi beberapa aspek berikut :
1. Aspek Anthropometri
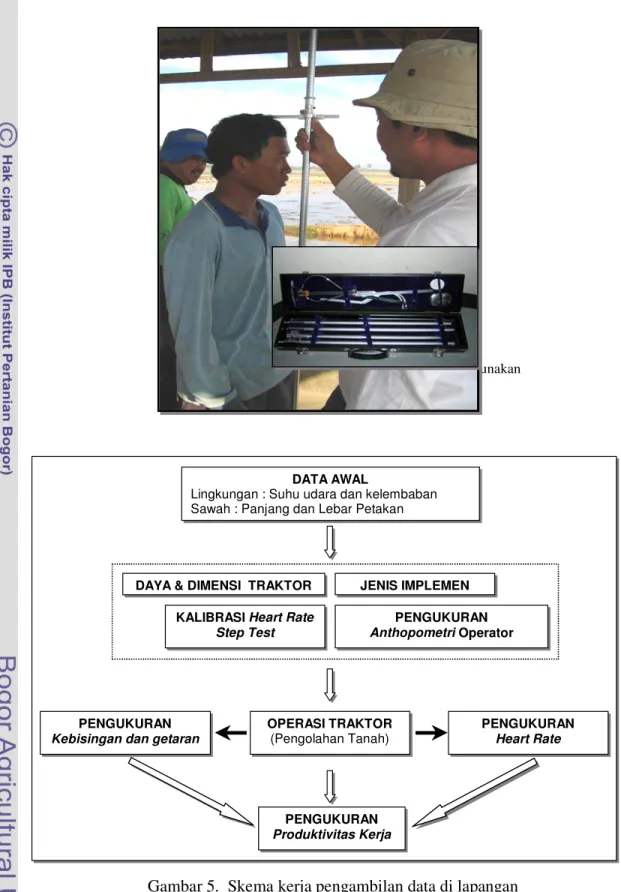
Pengambilan data anthropometri operator dilakukan bersama dengan pengukuran dimensi traktor tangan yang digunakan dalam pengolahan tanah. Data anthropometri dan dimensi traktor yang diukur terdiri :
a. dimensi traktor tangan :
- jarak kemudi kiri dan kanan atau lebar kemudi (cm) - tinggi kemudi dari permukaan tanah datar (cm) - kedalaman roda besi pada tanah sawah (cm)
b. anthropometri operator :
- panjang pangkal lengan (upper arm) (cm) - panjang lengan bagian bawah (forearm) (cm) - lebar bahu (cm)
- tinggi siku (cm)
- kedalaman kaki dalam tanah sawah (cm)
Gambar 4. Pengukuran anthropometri operator menggunakan anthropolometer
Gambar 5. Skema kerja pengambilan data di lapangan
DATA AWAL
Lingkungan : Suhu udara dan kelembaban Sawah : Panjang dan Lebar Petakan
KALIBRASI Heart Rate
Step Test
OPERASI TRAKTOR
(Pengolahan Tanah)
DAYA & DIMENSI TRAKTOR
PENGUKURAN
Anthopometri Operator
PENGUKURAN
Heart Rate
PENGUKURAN
Kebisingan dan getaran
JENIS IMPLEMEN
PENGUKURAN
Analisis aspek anthropometri meliputi penentuan posisi optimum operator dalam
mengoperasikan traktor tangan yaitu penentuan lebar optimum kemudi dan
penentuan tinggi optimum kemudi traktor tangan.
1.1. Penentuan Posisi Optimum Tinggi Kemudi
Posisi berdiri optimum operator dapat dicapai pada kondisi tangan operator memberikan ruang bebas antara operator dan traktor tangan (clearance) terbesar. Posisi ini diperoleh pada saat lengan bawah berada pada posisi horisontal (sejajar siku), sedangkan posisi lengan bawah di atas siku akan memberikan efek pengurangan gaya atau kekuatan genggam jari tangan (Nurmianto 1991).
Dengan memperhatikan arah dan besar gaya yang bekerja pada stang kemudi terhadap operator di mana gaya terbesar yang dilakukan oleh operator adalah gaya ke atas untuk menahan laju implemen masuk ke dalam tanah ( Dhafir 2002) serta melihat posisi sudut siku (elbow angle) yang memberikan kekuatan tekan ke bawah dan kekuatan tarik ke atas maksimum terjadi pada sudut 120o (Woodson et al. 1992) maka posisi optimum seperti pada Gambar 6 dapat ditentukan sebagai
berikut (kastaman 1999) :
)
30
(
*Cos
PLBA
TB
TK
maks=
−
... (6))
40
(
*
minTS
PLBB
Cos
TK
=
−
... (7) di mana :TKmaks = Tinggi kemudi maksimum (cm)
TKmin = Tinggi kemudi minimum (cm)
TB = Tinggi bahu (cm) TS = Tinggi siku (cm)
PLBA = Panjang lengan bagian atas (cm) PLBB = Panjang lengan bagian bawah (cm)
PLB A PLB B 120o 40o TKm in TKm aks
Gambar 6. Ilustrasi posisi optimum tinggi kemudi traktor tangan
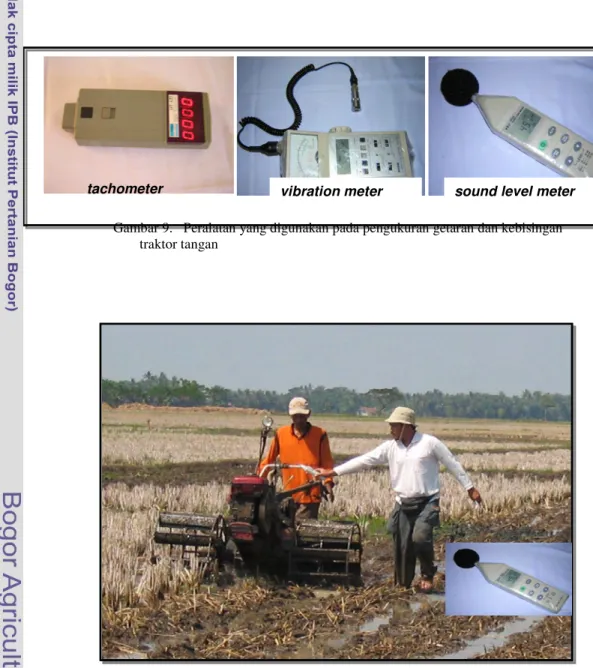
1.2. Penentuan Lebar Optimum Jangkauan KemudiLebar jangkauan kemudi berhubungan dengan kenyamanan operator dalam menjalankan atau mengoperasikan traktor tangan. Lebar optimum berhubungan dengan sudut antara lengan atas dengan badan. Posisi alami sudut lengan atas dengan badan antara 0-30o (Zander 1972; Kastaman
1999). Ilustrasi pengukuran lebar jangkuan kemudi dapat dilihat pada Gambar 7.
(
2xPLBAxSin
(
30
)
)
LB
LJK
Maks=
+
... (8)LB
LJK
Min=
... (9) di mana :LJKMaks = Lebar jangkauan kemudi maksimum (cm)
LJKMin = Lebar jangkauan kemudi minimum (cm)
LB = Lebar bahu (cm)
PLBA = Panjang lengan bagian atas (cm)
Gambar 7. Ilustrasi posisi pengukuran untuk menentukan lebar
jangkauan kemudi optimum traktor tangan
2. Aspek Denyut JantungPengukuran denyut jantung operator dilakukan melalui tahapan berikut :
3 0o
P L B A
θ Pemasangan heart rate monitor pada operator, transmitter dipasangkan di dada operator sedangkan receivernya dipasang di pergelangan tangan (Gambar 8). Denyut jantung akan tersimpan pada receiver sedangkan waktu dan aktivitas pekerjaan dicatat pada time study sheet.
θ Melakukan kalibrasi terlebih dahulu menggunakan metode step test yaitu dengan cara melakukan aktivitas naik turun bangku dengan ketinggian 30 cm dengan frekwensi 20, 25, 30 dan 35 siklus per menit (menggunakan irama dari metronome) di mana satu siklus adalah sekali naik dan sekali turun bangku. Pengukuran laju denyut jantung pada saat step test dilakukan tiap 3 menit dengan istirahat duduk selama 5 menit.
θ Pengukuran denyut jantung operator pada saat melakukan pengolahan tanah, di mana sebelumnya operator melakukan istirahat duduk selama 10 menit, waktu dan aktivitas pekerjaan dicatat pada time study sheet.
Gambar 8. Heart rate monitor dipasang pada operator selama pengolahan tanah
Kalibrasi dengan step test sebelum pengukuran laju denyut jantung
pada saat operator melakukan pengolahan tanah dilakukan untuk
meminimalkan pengaruh psikologis, sehingga diperoleh nilai laju denyut
jantung yang mencerminkan beban kerja operator pada saat bekerja
(Herodian 1997). Pengukuran laju denyut jantung digunakan untuk melihat
beban kerja yang diterima oleh operator traktor dalam melakukan
pengolahan tanah. Dengan mengetahui beban kerja operator berdasarkan
laju denyut jantung pada saat pengolahan tanah, dapat ditentukan
paramater-parameter ergonomi yang memberikan dampak beban kerja
(1) receiver & memory, (2) sensor & transmitter
2
terhadap operator serta yang mempengaruhi produktivitas kerja di
lapangan.
3. Aspek Kebisingan dan Getaran
Pengukuran tingkat kebisingan dilakukan pada saat operator sedang melakukan pengolahan tanah dengan menggunakan sound level meter (Gambar 9). Tingkat kebisingan diukur pada engine dan operator pada posisi disamping (dekat) telinga kiri dan kanan (Gambar 10).
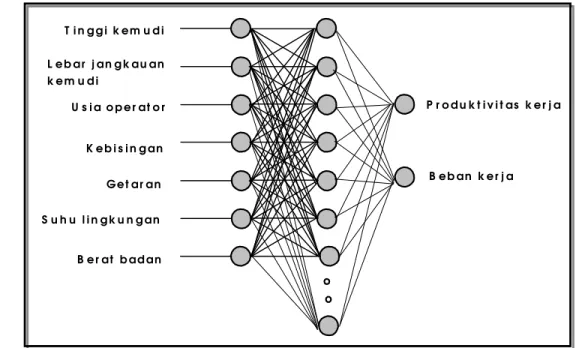
Gambar 9. Peralatan yang digunakan pada pengukuran getaran dan kebisingan traktor tangan
Gambar 10. Pengukuran kebisingan traktor tangan di lapangan ( pada engine dan di telinga operator )
Pengukuran getaran dilakukan dengan menggunakan portable vibration meter pada kondisi stasioner maupun saat operator melakukan kerja pengolahan tanah (Gambar 12), pada berbagai tingkat kecepatan putaran mesin berdasarkan nilai kisaran yang tercatat pada alat ukur kecepatan putaran mesin
(tachometer). Tingkat getaran yang diukur adalah percepatan getaran pada sumbu x, sumbu y dan sumbu z (Gambar 11).
Gambar 11. Penempatan sensor getaran pada stang kemudi traktor tangan
Gambar 12. Pengukuran getaran traktor tangan di lapangan
Pemodelan
Untuk melihat pengaruh dan perilaku dari setiap parameter terhadap tingkat
produktivitas kerja pengolahan tanah dilakukan dengan menggunakan model Jaringan
Syaraf Tiruan (JST) yang ditampilan pada Gambar 13. Model JST yang dikembangkan
terdiri dari 2 model yaitu model A dan B, berdasarkan jenis implemen yang digunakan
pada pengolahan tanah pertama ( gelebeg dan rotari ). Dari tiap model berdasarkan
implemen yang digunakan, dikembangkan model JST dengan formulasi lapisan
keluaran (output) sebagai berikut :
1. Lapisan keluaran produktivitas kerja pengolahan tanah (m
2/ jam).
2. Lapisan keluaran tingkat beban fisik berdasarkan parameter laju denyut jantung
(denyut / menit).
Lapisan keluaran dibuat berdasarkan nilai laju denyut jantung operator dan
produktivitas kerja pengolahan tanah, dengan rangkaian model menggunakan multi
layer yang terdiri dari tiga lapisan :
1. Lapisan masukan menggunakan parameter yaitu ; lebar jangkauan kemudi,
tinggi kemudi, usia operator, berat badan, kebisingan, getaran, dan suhu
lingkungan.
2. Lapisan tersembunyi, sebagai lapisan pemrosesan atau pembanding antara
lapisan masukan dan lapisan keluaran yang menghasilkan nilai pembobot
diantara lapisan-lapisan tersebut.
3. Lapisan keluaran terdiri dari 2 unit keluaran yaitu produktivitas kerja
pengolahan tanah dan tingkat beban fisik berdasarkan nilai laju denyut jantung.
Gelebeg MODEL JST ( A ) WAKTU KERJA OPERATOR TINGKAT BEBAN KERJA OPERATOR PRODUKTIVITAS KERJA PENGOLAHAN TANAH PERTAMA Daya Motor MODEL JST ( B ) TINGKAT BEBAN KERJA OPERATOR WAKTU KERJA OPERATOR Rotari PRODUKTIVITAS KERJA PENGOLAHAN TANAH PERTAMA
Gambar 13. Skema pemodelan dengan Jaringan Syaraf Tiruan
Gambar 14. Model JST yang dikembangkan pada tiap jenis implemen
Dari model yang dikembangkan memungkinkan untuk mengetahui dan
menganalisis pengaruh masing-masing parameter input (tinggi kemudi, lebar kemudi,
usia operator, getaran, kebisingan, suhu lingkungan dan berat badan) pada setiap jenis
implemen dan daya motor yang digunakan oleh traktor tangan pada pengolahan tanah
pertama terhadap tingkat beban kerja yang diterima operator dan produktivitas kerja
pengolahan tanah pertama di lahan sawah.
Proses pembelajaran model JST
Data sampel hasil pengukuran digunakan sebagai bahan pada proses
pembelajaran (training), dengan menggunakan metode back propagation (Patterson
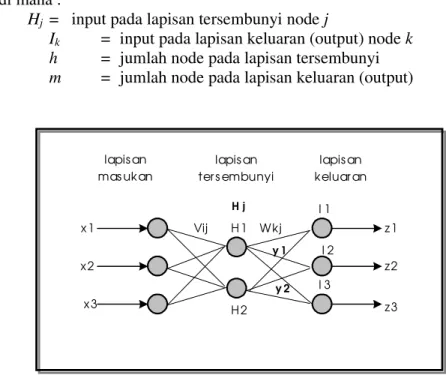
1996). Mekanisme pembelajaran dilakukan melalui ilustrasi Gambar 15 serta
tahapan dan persamaan berikut :
- Input pada lapisan masukan merupakan input bagi lapisan tersembunyi
∑
=
i ij i jV
x
H
j = 1, 2, ...h ...(10)
∑
=
i kj j kW
y
I
k = 1, 2, ...m ...(11)
L eb ar j an g k au an k em u d i U s i a o p er at o r K eb i s i n g an Get ar an S u h u l i n g k u n g an T i n g g i k em u d i B er at b ad an P r o d u k t i v i t as k er j a B eb an k er j adi mana :
H
j= input pada lapisan tersembunyi node j
I
k= input pada lapisan keluaran (output) node k
h = jumlah node pada lapisan tersembunyi
m = jumlah node pada lapisan keluaran (output)
Gambar 15. Ilustrasi pembelajaran backpropagation
- Perhitungan nilai output node j pada lapisan tersembunyi dan output node k pada
lapisan keluaran dengan persamaan berikut :
)
f(H
y
j=
jj = 1, 2, ....k
...(12)
)
f(I
z
k=
kk = 1, 2, ....m ...(13)
sehingga persamaan keseluruhan output pada lapisan keluaran ke k dengan
masukan nilai input x adalah :
z
k=
f(I
k)
=
∑
j)
y
W
f(
kj j=
∑
j kj j))
f(H
W
f(
=
∑
∑
j kj ji))
V
f(
W
f(
i ix
...(14)
fungsi (f ) yang digunakan pada proses pembelajaran merupakan fungsi aktivasi
log-sigmoid :
lapis an mas ukan lapis an ter s embunyi lapis an keluar an x1 x2 x3 Vij H1 Wkj H2 I 1 I 2 I 3 z1 z3 z2 H j y 1 y 2j â(Hj)
e
1
1
)
f(H
−+
=
...(15)
k â(Ik)
e
1
1
)
f(I
−+
=
...(16)
di mana :
β
= konstanta fungsi sigmoid
- Prinsip backpropagation adalah mengoptimalkan nilai fungsi dengan memperkecil
nilai galat (error) hingga mencapai minimum global, melalui perbaikan nilai
pembobot dengan membandingkan nilai output jaringan dengan nilai target yang
diberikan dengan menggunakan persamaan jumlah kuadrat galat :
∑
−
=
p 2 k p kz
)
(t
2
1
E
...(17)
di mana : t = target dan z = keluaran JST
- Perbaikan nilai pembobot dilakukan untuk memperkecil nilai galat dengan
menggunakan metode delta rule :
j k kj
çä
y
ÄW
=
...(18)
di mana :
η
= konstanta laju pembelajaran
ÄW = perubahan nilai pembobot W
kj kjδ
k=
galat output ke k
y
j= fungsi log-sigmoid
ÄV
ji=
çä
jx
i...(19)
Dari persamaan-persamaan di atas maka nilai pembobot dapat dirumuskan melalui
persamaan berikut :
)
(I
)f'
z
(t
çy
W
ÄW
W
W
kjbaru=
kjlama+
kj=
kjlama+
j k−
k k...(20)
∑
+
=
+
=
V
jilama jiV
jilama j j kδ
kW
kj baru jiÄV
çx
f'
(H
)
V
...(21)
- Semua proses di atas dilakukan secara berulang-ulang melalui pemberian nilai
input-output, proses aktivasi dan perubahan nilai pembobot. Kinerja jaringan
dievaluasi melalui nilai
Root Mean Square Error (RMSE), hal ini untuk melihat
tingkat ketelitian model yang telah dibangun.
(
)
n
T
Y
RMSError
=
∑
k−
k 2 ...(22)di mana : Y
k= nilai prediksi jaringan
Tk = nilai target yang diberikan pada jaringan n = jumlah contoh data pada set validasi
Pola data masukan (input) model JST
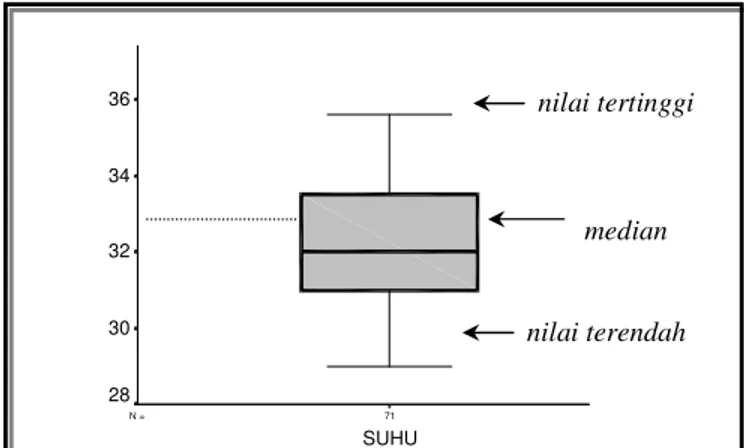
Dalam pemodelan ini untuk melihat pola data dilakukan analisis statistik dengan menggunakan metode Box Plot yang dikembangkan oleh J.W. Tukey (Koopmans 1987). Metode ini
memungkinkan untuk mendapatkan informasi diskriptif dan analisis mengenai sampel data dalam bentuk tampilan diagram dengan menggunakan perangkat lunak SPSS seperti ditampilkan pada
Gambar 16.
Gambar 16. Tampilan sebaran data dengan metode boxplot
Kalibrasi dan Validasi model JST
Kalibrasi model dilakukan untuk melihat hasil ketelitian pada proses pembelajaran (training) JST, sedangkan validasi model dilakukan sebagai pengujian ketepatan (akurasi) prediksi JST untuk memberikan jawaban yang benar melalui pemberian sampel data baru di luar data yang digunakan pada proses pembelajaran. Kalibrasi dan akurasi model dirumuskan sebagai nilai r2 (koefisien
diterminasi) yang berada pada selang 0 – 1, di mana nilainya akan semakin meningkat dengan semakin baik tingkat akurasinya.
71 N = SUHU 36 34 32 30 28 median nilai terendah nilai tertinggi edian
Optimasi Rancangan dan Pengoperasian Rancangan Traktor
Optimasi dilakukan untuk mendapatkan bentuk rancangan yang optimum dan pengoperasian traktor tangan yang sesuai dengan kondisi (karakteristik) operator di lapangan. Berdasarkan parameter input – output JST, optimasi rancangan dilakukan untuk mendapatkan nilai tinggi dan lebar kemudi yang optimum bagi operator, sedangkan optimasi pada pengoperasian rancangan traktor bertujuan untuk mengetahui karakteristik operator yang sesuai berdasarkan rancangan traktor yang sudah ada.
Metode optimasi yang dipakai adalah random search, yaitu dengan memasukkan parameter input (tinggi dan lebar jangkauan kemudi serta usia dan berat badan operator) yang bervariasi secara acak ke dalam JST dan kemudian menentukan nilai output terbaik dari variasi input tersebut. Untuk mendapatkan nilai yang optimum, parameter input yang lain di dalam JST dianggap tetap (ceteris paribus).