Pengendalian Proses 1
PENGENDALIAN PROSES
Disusun oleh Ir. HERIYANTO, M.T.
Pengendalian Proses 2
KATA PENGANTAR
Buku ini disusun dengan dua tujuan yaitu, sebagai buku pegangan kuliah mahasiswa dan sebagai referensi bagi teknisi dan operator pabrik. Buku berisi konsep, prinsip, prosedur dan perhitungan yang dipakai oleh ahli teknik atau teknisi untuk menganalisa, memilih, merancang sistem pengendalian. Setelah memahami isi buku ini diharapkan dapat memiliki pengetahuan dan pemahaman pengendalian proses sehingga mampu menerapkan pada kondisi nyata.
Pengendalian proses umumnya sarat dengan matematika. Tetapi dalam buku ini matematika tidak menjadi landasan utama, meskipun tidak dapat dihindari. Oleh sebab itu pendekatan yang dilakukan bukan dengan analisis transformasi Laplace seperti yang biasa dilakukan di hampir seluruh perguruan tinggi. Ini atas dasar pertimbangan, bahwa dalam kondisi nyata, pada saat operator berhadapan langsung dengan sistem pengendalian di pabrik, mereka tidak memerlukan analisis transformasi Laplace. Transformasi Laplace hanya dipakai untuk pemodelan dan analisis sistem linier.
Sasaran pemakai buku ini adalah untuk mahasiswa Diploma III atau Politeknik Jurusan Teknik Kimia dan Kimia Inudstri serta umumnya untuk mahasiswa dari bidang yang berkaitan atau sedang mempelajari teknologi proses misalnya Teknik Mesin, Teknik Energi, dan Teknik Refrigerasi.
Penulis mengucapkan terima kasih kepada Politeknik Negeri Bandung atas Penyusunan Bahan Ajar dalam Kurikulum Berbasis Kompetensi (Kurikulum 2007) yang dibiayai dari DIPA tahun anggaran 2010, sehingga penulisan Buku Ajar ini dapat dilaksanakan. Tidak lupa penulis juga mengucapkan terima kasih kepada semua fihak, baik yang langsung maupun tidak langsung telah membantu penulisan buku ini. Penulis menyadari sepenuhnya bahwa buku ini masih kurang sempurna. Oleh sebab itu segala saran dan kritik yang bersifat membangun sangat dinantikan. Semoga buku ini bermanfaat.
Pengendalian Proses 3
DAFTAR ISTILAH
Gangguan yaitu besaran yang menyebabkan penyimpangan keadaan proses.
Mengendalikan (kata kerja) adalah “memperoleh” keadaan yang diinginkan dengan cara mengatur variabel tertentu dalam sistem.
Offset adalah selisih antara nilai setpoint dan variabel proses setelah tercapat kondisi tunak (steady state).
Pengendalian proses adalah “cara memperoleh” keadaan proses agar sesuai dengan yang diinginkan.
Pengendalian umpan balik adalah pengendalian yang memakai variabel keluaran sistem untuk mempengaruhi masukan dari sistem yang sama.
Pengendalian umpan maju (feedforward control) adalah pengendalian yang memakai variabel masukan untuk mempengaruhi variabel masukan lain dalam sistem.
Proportional gain atau sensitivitas proporsional adalah perbandingan antara perubahan sinyal kendali (u) dan perubahan error (e).
Proportional band (PB), yaitu persentase perubahan error atau pengukuran yang menghasilkan perubahan sinyal kendali atau manipulated variable sebesar 100%.
Proses dalam kata pengendalian proses dan industri proses menunjuk pada “cara perubahan” materi atau energi untuk memperoleh produk akhir.
Setpoint adalah nilai variabel proses yang diinginkan.
Sistem proses adalah rangkaian operasi yang menangani perubahan material dan/atau energi secara fisiko-kimia sehingga diperoleh produk atau keadaan yang diingink.
Variabel keadaan adalah besaran yang menyatakan keadaan dinamik sistem
Pengendalian Proses 4
BAB-1 PENDAHULUAN
TUJUAN PEMBELAJARAN UMUM
Mengenal dasar-dasar pengendalian proses secara kualitatif.
TUJUAN PEMBELAJARAN KHUSUS
Setelah menyelesaikan bab ini, mahasiswa diharapkan dapat: 1.1menjelaskan alasan mengapa proses perlu dikendalikan. 1.2 menjelaskan prinsip pengendalian proses
Pengendalian Proses 5 1.1 SISTEM PROSES DAN PENGENDALIAN
Sistem pengendalian banyak ditemui dalam kehidupan sehari-hari. Beberapa contoh misalnya mempertahankan suhu tubuh 37oC oleh pusat kendali hipotalamus; mempertahankan arah kendaraan bermotor dalam jalur yang benar; mempertahankan suhu ruangan dalam kisaran 18 hingga 22 oC; dan masih banyak lagi. Dalam industri proses, sistem pengendalian bertujuan untuk mencapai kondisi proses agar diperoleh produk akhir yang sesuai. Namun, apakah memang betul-betul diperlukan pengendalian proses? Proses tidak perlu dikendalikan jika memang tujuan proses tercapai tanpa aksi pengendalian. Contoh sederhana mempertahankan suhu air pada titik didih. Meskipun tanpa pengendalian suhu air akan tetap. Sebaliknya, proses perlu dikendalikan jika untuk mencapai tujuan perlu pengawasan terus-menerus. Misalnya mempertahankan suhu air pada 40 oC dalam kondisi lingkungan normal.
Dalam industri proses modern terdapat peralatan proses yang bekerja pada suhu dan tekanan ekstrem. Rangkaian peralatan sudah sedemikian kompleks. Sementara kondisi proses bersifat dinamik. Dari waktu ke waktu dapat berubah-ubah. Perubahan sedikit pada kondisi proses bisa berakibat fatal. Inilah yang menjadi alasan mengapa diperlukan suatu sistem pengendalian.
Sistem pengendalian atau sistem kontrol adalah susunan beberapa komponen yang terangkai membentuk aksi pengendalian. Sistem pengendalian yang diterapkan dalam teknologi proses disebut sistem pengendalian proses. Dalam bidang ini, pengendalian proses diterapkan pada reaktor, penukar panas (heat exchanger), kolom pemisahan (misalnya distilasi, absorpsi, ekstraksi), tangki penampung cairan, aliran fluida, dan masih banyak lagi.
1.2 PERANAN PENGENDALIAN PROSES
Peranan pengendalian proses dalam pabrik kimia mecakup tiga kelompok yaitu keamanan (safety), kehandalan operasi (operability), dan keuntungan eknomi (profitability).
1.2.1 Keamanan (safety)
Dalam kelompok ini, keamanan meliputi: keselamatan manusia, perlindungan peralatan, dan perlindungan lingkungan.
Pengendalian proses adalah “cara memperoleh” keadaan proses agar sesuai dengan yang diinginkan
Mengendalikan (kata kerja) adalah “memperoleh” keadaan yang diinginkan dengan cara mengatur variabel tertentu dalam sistem.
Pengendalian Proses 6 (a) Keselamatan Manusia
Sistem pengendalian bertugas menjaga keselamatan kerja. Beberapa sistem proses di pabrik memiliki kondisi operasi yang berbahaya bagi keselamatan manusia. Kondisi operasi pada suhu dan tekanan tinggi dengan bahan kimia berbahaya sangat berpotensi menimbulkan kecelakaan. Perlengkapan sistem alarm dan safety valve dapat memperkecil kemungkinan kecelakaan akibat kondisi ekstrem terlampaui.
(b)Perlindungan Peralatan
Sistem pengendalian bertugas mempertahankan batas aman operasi. Peralatan industri biasanya mahal dan sulit diperoleh. Jika terjadi kondisi darurat, sistem dapat melakukan penghentian (automatic shutdown) dan penguncian darurat (automatic emergency interlock) sehingga kegagalan satu peralatan tidak menjalar ke peralatan lain. Sistem ini selain melindungi peralatan juga melindungi manusia dari kecelakaan.
(c) Perlindungan Lingkungan
Sistem pengendalian bertugas mempertahankan batas aman pencemaran. Proses industri dapat menghasilkan bahan berbahaya bagi lingkungan. Kebocoran gas, cairan, atau padatan beracun dan yang merusak lingkungan perlu dihindari. Gas-gas yang berbahaya dan mudah terbakar disalurkan ke menara pembakar (flare). Jika menara pembakar tidak mampu menangani, gas terpaksa dibuang ke atmosfer melalui pressure safety valve untuk menghindari kondisi ekstrem yang membahayakan peralatan dan manusia.
1.2.2 Kehandalan Operasi (operability)
Kehandalan operasi meliputi ketahanan terhadap gangguan produktivitas dan kualitas produk. Sistem pengendalian proses harus mampu menekan pengaruh gangguan sehingga dapat mempertahankan kondisi operasi yang mantap (steady operation) dalam batas operasional (operational constraint). Dengan perkataan lain, pengendalian proses mampu memperkecil keragaman kualitas dan produktivitas. Kualitas dan produktivitas sesuai spesifikasi dengan tingkat keragaman (variability) sekecil mungkin.
1.2.3 Keuntungan Ekonomi (profitability)
Keuntungan ekonomi menjadi tujuan akhir dari proses produksi. Proses yang tidak aman dengan kondisi operasi tidak optimal, akan memperkecil keuntungan. Oleh sebab itu sistem pengendalian bertujuan menghasilkan kondisi operasi optimum. Ini mengandung arti kuantitas dan kualitas produk utama (yield) maksimum dengan biaya produksi minimum.
Kuantitas dan kualitas (atau spesifikasi) produk ditetapkan oleh permintaan pasar. Jika terjadi penyimpangan dari spesifikasi akan menurunkan nilai jual produk. Misalnya, spesifikasi produk dengan batas maksimum pengotor, maksimum viskositas, minimum ketebalan, minimum konsentrasi, dsb.
Pengendalian Proses 7 keragaman produk lebih besar. Sehingga rata-rata kualitas produk lebih jauh dari spesifikasi agar tidak ada produk yang keluar batas. Sebaliknya dengan pengendalian proses yang baik, produk lebih seragam, sehingga rata-rata kualitas produk bisa lebih dekat dengan batas spesifikasi.
Semua tujuan pengendalian proses seperti yang telah diuraikan adalah untuk pabrik secara keseluruhan. Sementara itu, pengendalian pabrik kimia dapat dirinci ke dalam pengendalian unit-unit proses atau operasi secara individual. Oleh sebab itu pembahasan dalam buku ini difokuskan pada metode pengendalian untuk variabel proses individual.
K
(a) Tanpa Pengendalian (b) Dengan Pengendalian
Gambar 1.1 Peranan pengendalian dalam industri proses.
1.3 PRINSIP PENGENDALIAN PROSES
Langkah pertama dalam memahami pengendalian proses dapat dimulai dengan mempelajari contoh proses pemanasan dalam alat penukar panas seperti dilukiskan pada gambar 1.2. Tujuan proses adalah memanaskan aliran minyak hingga suhu tertentu. Minyak dingin masuk penukar panas dan dipanaskan oleh aliran air panas. Suhu minyak keluar menunjukkan hasil kerja proses pemanasan. Oleh sebab itu suhu minyak keluar disebut sebagai nilai proses (process value), variabel proses (process variable), atau variabel keluaran (output variable) sistem proses.
Pada proses pemanasan, minyak dingin menjadi panas karena terjadi perpindahan panas dari aliran air panas ke minyak dingin. Proses ini dipengaruhi oleh: (1) laju aliran minyak masuk, (2) suhu minyak masuk, (3) laju alir air panas, (4) suhu air panas, dan (5) kehilangan panas ke lingkungan. Dengan kata lain, suhu minyak keluar dipengaruhi oleh ke lima besaran tersebut. Ke lima besaran itu sebagai variabel masukan sistem proses yaitu besaran yang mempengaruhi variabel keluaran (suhu minyak keluar).
(1) Keamanan (safety). Menjaga dan mempertahankan batas aman keselamatan kerja, operasi, dan pencemaran;
(2) Kehandalan operasi (operability). Mempertahankan kondisi tetap mantap dalam batas operasional (operational constraint) sehingga produktivitas dan kualitas produk terjaga
Pengendalian Proses 8 Gambar 1.2 Proses pemanasan cairan dalam penukar panas
Laju dan suhu aliran minyak masuk serta kehilangan panas bersifat membebani proses, sehingga disebut beban proses. Perubahan pada beban bersifat sebagai gangguan beban (load disturbance) atau variabel gangguan beban. Berbeda dengan ketiganya, perubahan suhu air panas bersifat sebagai gangguan murni (bukan beban proses) karena bertindak sebagai pemanas. Sedangkan laju alir air panas yang digunakan sebagai pengendali suhu disebut sebagai variabel pengendali atau termanipulasi (manipulated variable).
Gambar 1.3 Diagram blok sistem proses pemanasan minyak.
Pengendalian proses bertujuan menjaga suhu minyak keluar (variabel proses) pada nilai yang diinginkan (setpoint). Ini dilakukan karena adanya gangguan yang berupa perubahan suhu aliran air panas, laju aliran minyak masuk, suhu minyak masuk, dan/atau kehilangan panas. Suhu minyak keluar disebut juga sebagai variabel terkendali (controlled variable) karena nilainya dikendalikan.
Pengendalian Proses 9 Pada pengendalian otomatik, yang menjalankan mekanisme pengendalian diperankan oleh instrumen. Instrumen yang diperlukan dalam pengendalian suhu adalah unit pengukuran suhu (berisi sensor dan transmitter suhu), pengendali suhu (temperature controller) dan katup kendali (control valve). Ketiga komponen ini bersama dengan sistem proses (penukar panas) membentuk lingkar pengendalian umpan balik (feedback control loop) atau sistem lingkar tertutup (closed-loop system). Mekanisme pengendalian lingkar tertutup dapat dijelaskan melalui gambar 1.4.
(a) (b)
Gambar 1.4 Pengendalian umpan balik pada proses pemanasan cairan. (a) Hubungan antar komponen sistem pengendalian. (b) Diagram instrumentasi pengendalian.
Sensor mengindera variabel proses (suhu minyak keluar, T). Informasi suhu dari sensor selanjutnya diolah oleh transmitter dan dikirimkan ke pengendali dalam bentuk sinyal listrik atau pneumatik. Dalam pengendali, variabel proses terukur dibandingkan dengan setpoint (Tr). Perbedaan antara keduanya disebut error (e). Berdasar besar error, lamanya error, dan kecepatan error, pengendali suhu (temperature controller) melakukan perhitungan sesuai algoritma kendali untuk menghasilkan sinyal kendali (controller output, u) yang berupa sinyal listrik atau pneumatik yang dikirimkan ke elemen kendali akhir (final control element biasanya berupa katup kendali atau control valve). Perubahan pada sinyal kendali menyebabkan perubahan bukaan katup kendali. Perubahan ini menyebabkan perubahan manipulated variable (laju alir air panas, S). Jika perubahan manipulated variable dalam arah dan nilai yang benar, maka variabel proses terukur dapat dijaga pada nilai setpoint. Dengan cara demikian akan tercapai tujuan pengendalian.
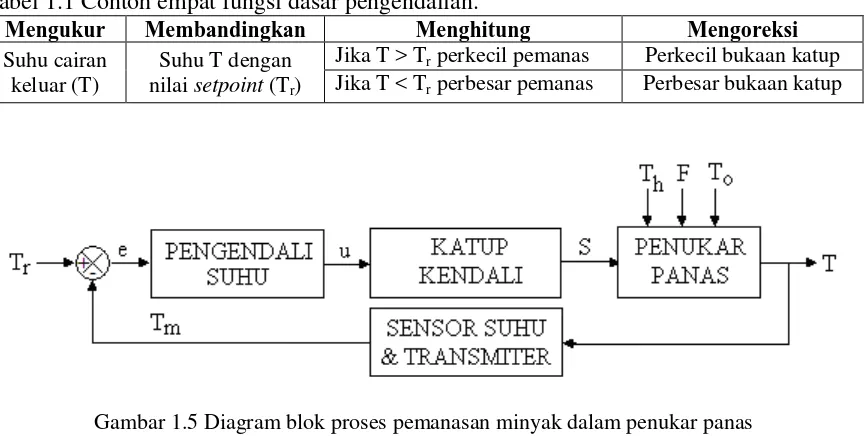
Prinsip pengendalian suhu tersebut di atas berlaku umum untuk semua pengendalian proses umpan balik. Di sini terdapat empat fungsi dasar, yaitu: mengukur (measurement), membandingkan (comparision), menghitung (computation, decision, atau evaluation) dan mengoreksi (correction atau action).
Pengendalian Proses 10 Tabel 1.1 Contoh empat fungsi dasar pengendalian.
Mengukur Membandingkan Menghitung Mengoreksi
Suhu cairan keluar (T)
Suhu T dengan nilai setpoint (Tr)
Jika T > Tr perkecil pemanas Perkecil bukaan katup
Jika T < Tr perbesar pemanas Perbesar bukaan katup
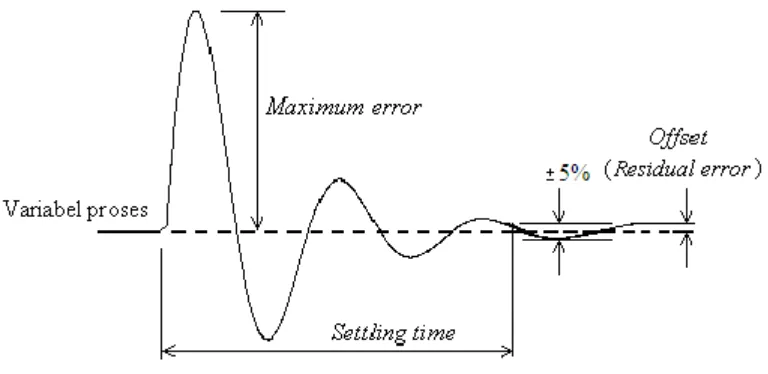
Gambar 1.5 Diagram blok proses pemanasan minyak dalam penukar panas Keterangan
Tr setpoint (suhu minyak yang diinginkan)
T suhu minyak keluar (variabel terkendali) Tm suhu minyak keluar terukur
e error (= Tr – Tm)
u sinyal kendali (controller output)
F laju alir minyak masuk To suhu minyak masuk
Th suhu air panas
S laju air panas (manipulated variable)
Diagram blok pengendalian proses pemanasan minyak dingin dengan penukar panas dilukiskan pada gambar 1.5. Termokopel (sebagai sensor) mengukur variabel proses terukur (suhu minyak keluar) kemudian dikirimkan oleh transmitter dan diumpan-balikkan ke pengendali. Sinyal pengukuran yang diumpan-balikkan dikurangkan dari setpoint untuk menghasilkan error. Oleh pengendali, error dihitung melalui algoritma tertentu untuk menghasilkan sinyal kendali (controller signal atau controller output). Sinyal kendali dipakai untuk melakukan aksi mekanik katup kendali yang akan mengubah manipulated variable. Perubahan manipulated variable dipakai untuk menjaga variabel proses terukur pada nilai setpoint dari adanya perubahan pada variabel gangguan.
1.3.1 Pengendalian Lingkar Tertutup, Lingkar Terbuka dan Manual
Terdapat dua metode pengendalian, yaitu pengendalian umpan balik (feedback control) dan umpan maju (feedforward control). Pengendalian umpan balik bekerja berdasar perubahan variabel proses terkendali yaitu penyimpangan variabel proses terhadap setpoint. Sedangkan pengendalian umpan maju bekerja berdasar perubahan gangguan yang masuk sistem.
Pengendalian Proses 11 terjadi mekanisme umpan balik. Peran pengendali digantikan oleh operator (manusia). Operator melihat variabel proses terkendali, membandingkan dengan nilai yang diinginkan dan akhirnya memutuskan untuk memperbesar atau memperkecil bukaan katup kendali. Posisi manual diperlukan pada saat mengatur parameter pengendali ketika penalaan (tuning). Pergantian dari otomatik ke manual juga umum dikerjakan pada saat darurat, bilamana pengendali menimbulkan masalah kestabilan operasi.
1.3.2 Pengendalian Umpan Maju
Instrumen yang diperlukan dalam pengendalian umpan maju adalah unit pengukuran gangguan (sensor dan transmitter), pengendali (controller) dan katup kendali (control valve). Susunan ketiga komponen ini bersama dengan sistem proses (misalnya penukar panas) membentuk lingkar pengendalian umpan maju (feedforward control loop). Mekanisme pengendalian umpan dapat dijelaskan melalui gambar 1.7.
Gambar 1.7 Diagram instrumentasi pengendalian umpan maju pada proses pemanasan (FT – flow transmitter dan TT – temperature transmitter).
Prinsip pengendalian umpan maju dimulai dari mengukur gangguan, mengevaluasi dan selanjutnya melakukan koreksi besar variabel pengendali. Sensor-sensor FT dan TT berturut-turut menerima rangsangan dari gangguan yaitu laju alir cairan masuk, suhu cairan masuk, dan suhu pemanas. Informasi tersebut selanjutnya diolah oleh pengendali umpan maju. Dalam pengendali, dilakukan perhitungan untuk menentukan laju aliran pemanas (manipulated variable) yang dibutuhkan berdasar perubahan beban atau gangguan yang terjadi. Hasil perhitungan dikirimkan ke katup kendali agar dapat mengalirkan aliran pemanas sesuai kebutuhan.
Pengendalian umpan maju tidak mengukur variabel proses melainkan gangguan. Padahal tidak semua gangguan dapat atau mudah diukur. Sebagai contoh, kehilangan panas ke lingkungan termasuk besaran yang sukar diukur. Karena tidak semua gangguan
Pengendalian Proses 12 dapat diukur, maka hasil pengendalian umpan maju tidak terlalu bagus. Lebih jauh, tidak ada jaminan bahwa nilai variabel proses sama dengan setpoint. Oleh sebab itu pengendalian umpan maju hampir selalu dipakai bersama pengendalian umpan balik. Pengendalian umpan balik bertugas mengantisisapi gangguan tak terukur serta memastikan nilai variabel proses sesuai yang diharapkan. Pengendalian umpan maju dipakai untuk mengantisipasi gangguan sebelum berpengaruh ke variabel proses. Satu-satunya keunggulan pengendalian umpan maju adalah kestabilan sistem.
Gambar 1.8 Diagram blok pengendalian umpan maju pada proses pemanasan. Keterangan
F laju alir cairan masuk To suhu cairan masuk
Th suhu aliran pemanas
S aliran pemanas sebagai manipulated variable
u sinyal kendali (controller output)
1.4 TANGGAPAN TRANSIEN SISTEM PENGENDALIAN
Dalam sistem pengendalian umpan balik, variabel proses terkendali dipengaruhi oleh setpoint dan beban (gangguan). Perubahan setpoint dapat dilakukan oleh operator atau pengendali lain. Sedangkan beban dapat berubah secara acak tergantung sistem proses dan lingkungannya. Jika terjadi perubahan setpoint atau beban, idealnya nilai variabel proses terkendali selalu sama dengan setpoint. Tetapi kondisi demikian tidak selalu dapat diperoleh. Variabel proses mungkin akan mengalami beberapa cara perubahan, yaitu: sangat teredam (overdamped), redaman kritik (critically damped), teredam (underdamped), osilasi kontinyu (sustained oscillation), atau tidak stabil (amplitudo membesar).
Pengendalian Proses 13 Gambar 1.9 Bentuk respons variabel proses pada perubahan nilai setpoint.
Dari keempat kemungkian tadi, yang paling dihindari, bahkan sama sekali tidak boleh terjadi adalah tanggapan tidak stabil (amplitudo membesar). Sedangkan tanggapan osilasi kontinyu dalam beberapa hal masih bisa diterima, meskipun cukup berbahaya.
1.5 TUJUAN PENGENDALIAN
Tujuan ideal pengendalian proses adalah mempertahankan nilai variabel proses agar sama dengan nilai yang diinginkan (setpoint). Tetapi tujuan tersebut sering tidak dapat atau sukar dipenuhi karena keterbatasan operasi dan kemampuan sistem pengendalian. Oleh sebab itu, tujuan praktis atau tujuan nyata pengendalian proses adalah mempertahankan nilai variabel proses di sekitar nilai yang diinginkan dalam batas-batas yang ditetapkan. Namun perlu diingat bahwa hakikat utama pengendalian proses dalam industri adalah untuk memperoleh hasil akhir proses produksi agar sesuai target. Makna dari pernyataan ini adalah, satu atau beberapa nilai variabel proses mungkin perlu dikorbankan semata-mata untuk mencapai tujuan yang lebih besar yaitu hasil akhir proses produksi.
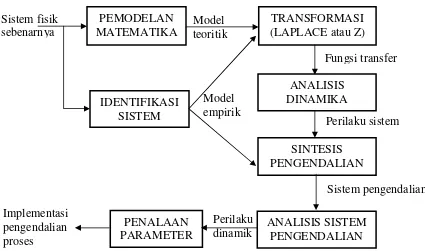
Tujuan pengendalian erat berkaitan dengan kualitas pengendalian yang didasarkan atas tanggapan variabel proses bila ada perubahan setpoint atau beban. Jika terjadi perubahan setpoint atau beban, variabel proses diharapkan:
• secepat mungkin mencapai kondisi mantap (settling time sekecil mungkin); • setepat mungkin mencapai setpoint (offset sekecil mungkin); dan
• sekecilmungkin terjadi osilasi (maximum error sekecil mungkin). Tujuan Ideal
Mempertahankan nilai variabel proses agar sama dengan setpoint. Tujuan Praktis
Mempertahankan nilai variabel proses di sekitar setpoint dalam batas yang ditetapkan.
Kualitas pengendalian
Setelah terjadi perubahan beban atau sepoint, diharapkan; • settling time sekecil mungkin (cepat)
• offset sekecil mungkin (tepat)
Pengendalian Proses 14 1.6 KRITERIA KUALITAS PENGENDALIAN
Evaluasi kinerja sistem pengendalian memerlukan dua hal, yaitu jenis uji dan kriteria yang tepat. Jenis uji yang sering dipakai adalah dengan cara mengubah nilai setpoint atau beban (step response test). Dari hasil uji, selanjutnya dianalisa apakah memenuhi kriteria atau tidak. Kriteria yang umum dipakai adalah: redaman seperempat amplitudo, redaman kritik, dan nilai minimum dari integral galat absolut (integral absolute error, IAE).
Kriteria Redaman Seperempat Amplitudo
Kriteria ini cukup populer, sebab mampu mengakomodasikan ketiga tujuan pengendalian sebagaimana tersebut di atas. Arti kriteria ini adalah, besar amplitudo berikutnya adalah seperempat dari sebelumnya. Atau decay ratio sebesar 0,25.
Gambar 1.10. Tanggapan sistem pengendalian lingkar tertutup pada perubahan setpoint.
Pengendalian Proses 15 Kriteria Nilai Minimum dari Integral Galat (Error) Absolut
Kriteria integral galat (error) absolut menunjukkan luas total galat (error). Kriteria IAE lebih disukai di kalangan praktisi industri karena kemudahan dalam mengukur.
Gambar 1.12. Kriteria redaman seperempat amplitudo dan IAE.
Kriteria Redaman Kritik
Kriteria ini dipakai variabel proses tidak boleh melebihi batas spesifikasi yang ditetapkan. Kondisi redaman kritik merupakan batas osilasi teredam.
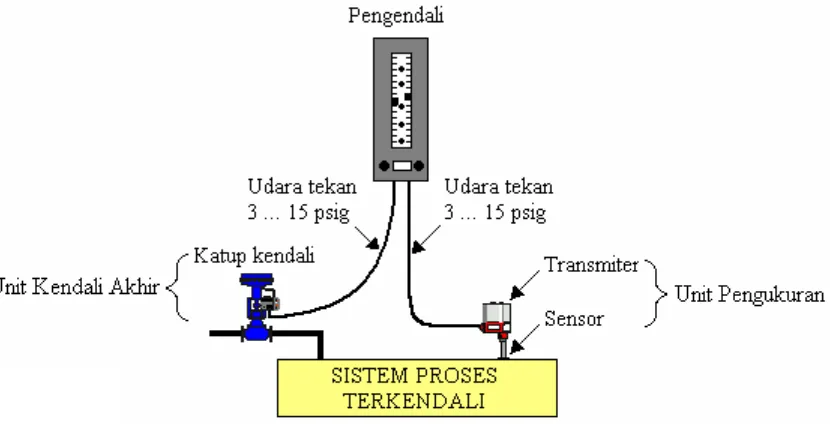
1.7 PERANCANGAN SISTEM PENGENDALIAN
Perancangan sistem pengendalian sebenarnya tidak bisa dilepaskan dari perancangan proses. Sebab sistem proses yang telah dibangun tanpa mempertimbangkan metode pengendaliannya tidak dapat menghasilkan kinerja yang baik. Antara kebutuhan pengendalian dan proses kadang-kadang bertentangan. Sebagai contoh, katup kendali yang dipakai mengatur laju alir fluida. Bagi proses, katup sebaiknya mempunyai hambatan sekecil mungkin, sehingga menghemat energi. Sebaliknya bagi pengendalian proses, katup sebaiknya mempunyai hambatan besar, agar dapat dicapai pengendalian yang baik.
Pengendalian Proses 16 Gambar 1.13 Diagram langkah perancangan atau pembelajaran pengendalian proses.
1.8 TERMINOLOGI
Variabel keadaan adalah besaran yang menyatakan keadaan dinamik sistem
Variabel proses (process variable, PV) adalah besaran yang menyatakan keadaan proses. Variabel Terkendali (controlled variable) adalah variabel yang secara langsung
dikendalikan.
Variabel Tak Dikendalikan (uncontrolled variable) adalah variabel proses yang tidak dikendalikan atau tidak langsung dikendalikan.
Variabel pengendali atau variabel termanipulasi (manipulated variable, MV) yaitu besaran yang dipakai untuk mengendalikan atau mempertahankan keadaan proses.
Gangguan adalah besaran yang menyebabkan penyimpangan keadaan proses.
Beban (load) atau gangguan beban (load disturbance) adalah besaran yang membebani proses dalam mencapai tujuan.
Setpoint, Titik Setel, atau Nilai Acuan (reference) adalah nilai variabel proses yang diinginkan atau nilai acuan variabel proses
Pengendalian Proses 17 SOAL-SOAL
A. ULANGAN
1. Apa peranan pengendalian proses di pabrik kimia? 2. Perhatikan pengendalian suhu pada setrika listrik.
(a) Apa yang dikendalikan?
(b) Apa yang dipakai mengendalikan?
(c) Jelaskan mekanisme kerja pengendaliannya! 3. Apa hakikat utama dan tujuan pengendalian proses?
4. Apa arti kriteria redaman seperempat amplitudo, redaman kritik, dan IAE?
B. PILIHAN GANDA Pilih satu jawab yang benar.
1. Hal berikut bukan merupakan sebab mengapa proses perlu dikendalikan, A. Agar PV sesuai yang diinginkan
B. Agar MV di sekitar 50% C. Keamanan proses
D. Efisiensi energi
2. Hal berikut bukan alasan mengapa perlu pengendalian proses… A. proses berlangsung aman
B. operasi berlangsung halus (tidak berfluktuasi) C. keuntungan yang besar
D. variabel pengendalitidak berfluktuasi
3. Tersebut di bawah alasan sistem proses perlu dikendalikan, kecuali … A. nilai variabel proses tetap
B. nilai manipulated variable tetap C. nilai variabel proses dan setpoint sama D. energi minimum
4. Arti kriteria redaman seperempat amplitudo adalah… A. perbandingan puncak dan puncak yang berurutan = 0,25 B. perbandingan puncak dan lembah yang berurutan = 0,25 C. perbandingan lembah dan puncak yang berurutan = 0,25 D. persentase overshoot = 25%
5. Kriteria kontrol yang menunjukkan error maksimum adalah A. settling time
B. offset
C. overshoot dan offset D. overshoot
6. Kriteria kontrol meliputi besaran yang berkaitan dengan ketepatan respons adalah … A. overshoot
B. settling time C. offset
Pengendalian Proses 18 7. Kriteria kontrol meliputi besaran:
(1) overshoot, (2) settling time, dan (3) offset.
Dari ketiga besaran, yang menunjukkan kecepatan respon adalah A. 1
B. 2 C. 3 D. 1 dan 3
8. Diameter maksimum produk 0,5 mm. Kriteria pengendalian yang cocok adalah… A. redaman seperempat amplitudo
B. redaman kritik
C. nilai minimum dari integral error absolut
D. redaman seperempat amplitudo dan redaman kritik
9. Sistem pengendalian dilakukan dengan mengatur besar manipulated variable tanpa mengukur variabel proses. Ini adalah sistem pengendalian...
A. umpan balik B. lingkar tertutup C. lingkar terbuka D. otomatik
10.Pada contoh pengendalian proses yang telah dibahas, ternyata suhu aliran proses keluar dipengaruhi oleh kehilangan panas ke lingkungan. Maka kehilangan panas termasuk...
A. variabel proses B. manipulated variable C. error
Pengendalian Proses 19
BAB-2
INSTRUMEN SISTEM PENGENDALIAN
Instrumen atau piranti utama dalam pengendalian proses adalah: sensor, transmiter, pengendali, transduser/konverter (bila diperlukan), dan katup kendali. Pada pengendali pneumatik, seluruh sinyal pengendalian memakai tekanan udara. Sehingga insteumen pengendalian hanya terdiri atas tiga macam. Sensor/transmiiter, pengendali, dan katup kendali pneumatik. Berbeda dengan sistem pengendalian pneumatik, pada pengendali elektronik, sinyal pengendalian memakai arus listrik. Oleh karena katup kendali biasanya jenis pneumatik, maka diperlukan konverter atau transduser I/P (arus ke pneumatik). Sehingga instrumen yang diperlukan adalah: sensor/transmiiter, pengendali, transduser I/P, dan katup kendali pneumatik.
Gambar 2.1 Instrumen atau piranti pengendali pneumatik.
Pengendalian Proses 20 1.8.1 Unit Pengukuran
Unit pengukuran berfungsi mengubah informasi besaran fisik terukur (variabel proses) menjadi sinyal standar. Unit ini terdiri atas dua bagian besar yaitu sensor dan transmiter.
• Sensor (elemen perasa atau pengindera) adalah piranti yang merespon rangsangan fisik. Sensor berhubungan langsung atau paling dekat berhubungan dengan variabel proses. Disebut dengan detecting element (elemen pendeteksi) atau elemen primer.
• Transmiter yaitu piranti yang berfungsi mengubah energi atau informasi yang datang dari sensor menjadi sinyal standar. Dua macam sinyal standar yang sering dapat dipakai yaitu sinyal listrik dan pneumatik.
Tabel 2.1 Sinyal standar dalam pengendalian proses.
SINYAL NILAI
MINIMUM
NILAI
MAKSIMUM SIMBOL
Pneumatik
(udara tekan) 20 kPa(g) 3 psi(g) 100 kPa(g) 15 psi(g)
Listrik 4 mA 20 mA
Umum 0% 100%
Dalam beberapa hal lebih sederhana dengan memasukkan sensor dalam blok transmiter. Sehingga dalam arti sempit, transmiter adalah instrumen yang mengukur besaran fisik dan mengirimkannya dalam bentuk sinyal pengukuran standar. Bila besaran fisik bertambah besar, maka sinyal pengukuran juga akan bertambah besar (bersifat direct acting).
(a) Gambar lengkap
(b) Penyederhanaan gambar (sensor termasuk dalam transmiter).
Gambar 2.3 Unit pengukuran terdiri atas sensor dan transmiter.
1.8.2 Unit Kendali Akhir
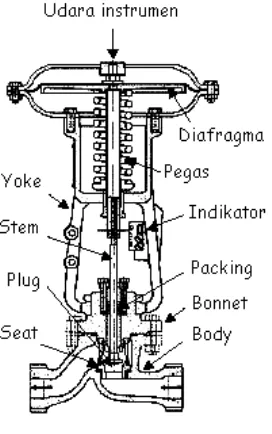
Pengendalian Proses 21 atas dua bagian besar, yaitu actuator dan elemen regulasi. Actuator atau penggerak adalah piranti yang mampu melakukan aksi fisik. Fungsinya mengubah sinyal kendali menjadi pengaturan fisik untuk pengendalian variabel proses. Jenis penggerak yang penting dalam industri proses adalah pneumatik, elektrik, dan hidrolik. Katup kendali (control valve) merupakan unit kendali akhir yang paling banyak dipakai di industri kimia. Piranti ini terdiri atas penggerak (actuator)dan katup (valve). Sebagai energi penggerak adalah udara tekan (pneumatik). Meskipun demikian kadang-kadang memakai penggerak listrik, baik motor listrik (motorized valve) maupun solenoida (solenoide valve). Bukaan katup diatur oleh penggerak.
Gambar 2.4 Penggerak (actuator) dan elemen regulasi.
Fungsi katup kencali adalah mengatur laju alir. Prinsipnya adalah bertindak sebagai penyempitan variabel (variable restriction) dalam perpipaan proses. Dengan mengubah bukaan akan mengubah hambatan, sehingga laju alir berubah. Gambar 2.12 dan 2.13 manampilkan sebuah katup kencali dengan penggerak pneumatik jenis air-to-close. Sinyal kendali 4-20 mA yang berasal dari pengendali elektronik memerlukan sebuah transduser yang mengubah sinyal arus ke tekanan udara (I/P) yaitu mengubah sumber udara tekan 20-25 psig (140-170 kPa) menjadi 3-15 psig (20 - 100 kPa).
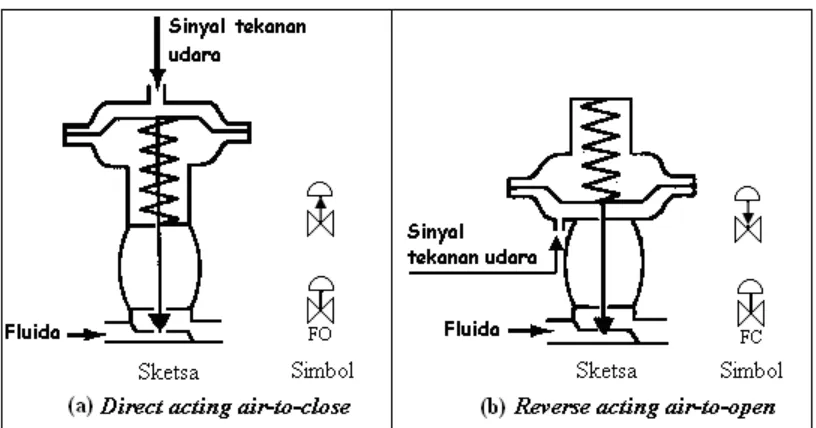
Pengendalian Proses 22 Gambar 2.7 Sketsa dan simbol katup kendali pneumatik.
(FO – fail-open, FC – fail-closed).
Penggerak pneumatik berisi diafragma yang terbuat dari karet sintetis (misalnya neoprena) dan pegas. Tekanan udara dari atas atau bawah diafragma akan melawan gaya pegas. Gerakan penuh stem terjadi pada rentang tekanan udara 3-15 psig. Oleh tekanan udara yang dikenakan pada diafragma stem bergerak dan katup membuka atau menutup.
Berdasar aksi katup oleh adanya perubahan tekanan udara, katup kencali dibedakan menjadi dua macam, yaitu air-to-open (AO) atau disebut fail-closed (FC) dan air-to-close (AC) atau disebut fail-open (FO). Pada jenis air-to-open, katup akan membuka jika mendapat tekanan udara. Atau dengan kata lain, bila terjadi kegagalan pasokan udara hingga tekanan jatuh ke minimum, katup akan menutup. Sebaliknya, pada jenis air-to-close, katup akan menutup jika mendapat tekanan udara. Atau dengan kata lain, bila terjadi kegagalan pasokan udara hingga tekanan jatuh ke minimum, katup akan membuka.
Berdasar aksi penggerak (actuator) oleh adanya perubahan tekanan udara, katup kendali dibedakan menjadi dua macam, yaitu: direct acting dan reverse acting. Pada modus direct acting, sinyal tekanan udara masuk dari atas. Dengan kenaikan sinyal tekanan udara, stem bergerak ke bawah. Sebaliknya, pada modus reverse acting, sinyal masuk dari bawah. Dengan kenaikan sinyal tekanan udara, stem bergerak ke atas.
Di kalangan praktisi industri telah berlaku kaidah umum bahwa kenaikan stem berarti katup membuka. Operator lebih berminat untuk mengetahui dan mengatur posisi katup, dan bukan nilai sinyal kendali. Sehingga nilai sinyal kendali 0% pada tampilan panel kendali selalu berarti katup kendali menutup, dan 100% membuka penuh, tanpa peduli jenis katup kendali. Oleh sebab itu jenis katup kendali yang populer adalah jenis direct acting air-to-close dan reverse acting air-to-open.
Kenaikan stem katup kendali, berarti katup membuka.
Pengendalian Proses 23 1.8.3 Unit Pengendali
Unit pengendali merupakan "otak" sistem dalam pengendalian. Pengendali adalah piranti yang melakukan perhitungan atau evaluasi nilai error menurut algoritma kendali. Evaluasi yang dilakukan berupa operasi matematika seperti, penjumlahan, pengurangan, perkalian, pembagian, integrasi dan diferensiasi. Hasil evaluasi berupa sinyal kendali yang dikirim ke unit kendali akhir. Sinyal kendali berupa sinyal standar yang serupa dengan sinyal pengukuran.
Gambar 2.8 Skema dasar unit pengendali.
Pengendali paling tidak memiliki tampilan nilai variabel proses (PV), pengatur dan tampilan setpoint (SP), pengatur dan tampilan nilai variabel pengendali (MV), serta sakelar AUTO/MANUAL. Yang terakhir merupakan satu sakelar penting. Sakelar ini menentukan operasi pengendali. Ketika sakelar pada posisi AUTO (otomatik), sinyal kendali diperoleh dari hasil pengolahan nilai error. Ketika sakelar pada posisi MANUAL, pengendali menghentikan pengolahan. Sinyal kendali diperoleh dari penyetelan manual oleh operator. Hanya dalam posisi auto pengendali memberi manfaat pengendalian proses.
Penentuan aksi algoritma pengendali, memerlukan pengetahuan bagaimana kebutuhan proses yang dikendalikan dan aksi katup kendali (control valve). Kedua pengetahuan tersebut mutlak harus dimiliki. Ahli proses dapat bertanya kepada diri sendiri, misalnya, apa aksi pengendali yang tepat untuk pengendalian tinggi permukaan cairan jika dipakai katup air-to-close dengan aliran keluar sebagai variabel pengendali. Aksi pengendali biasanya dapat disetel dengan sakelar pada sisi panel pengendali pneumatik atau elektronik.
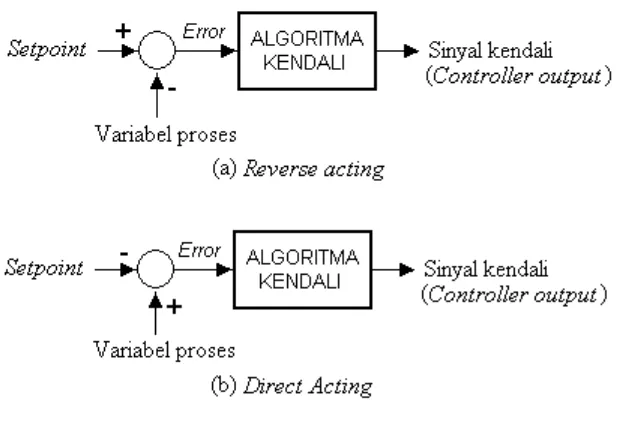
Pengendalian Proses 24 Tabel 2.2 Aksi pengendali.
Aksi Variabel Proses (PV) Variabel Pengendali (MV) atau Sinyal Kendali Direct acting Naik | Turun Naik | Turun Reverse acting Naik | Turun Turun | Naik
Tabel 2.3 Aksi sistem proses, pengendali, dan katup kendali.
Aksi Sistem Proses Aksi Pengendali Aksi Katup Kendali Direct acting Reverse acting Biasanya FC Reverse acting Direct acting Biasanya FO
Gambar 2.9 Pengendali direct acting dan katup kendali fail-open (air-to-close).
Gambar 2.10 Pengendali reverse acting dan katup kendali fail-closed (air-to-open).
Pengendalian Proses 25 1.9 DIAGRAM BLOK
Penggambaran suatu sistem atau komponen dari sistem pengendalian dapat berbentuk blok (kotak) yang dilengkapi dengan anak panah masuk dan keluar. Anak panah menggambarkan informasi besaran fisik dan atau sinyal. Informasi yang dimaksud dapat berupa nilai suhu, laju alir, tekanan, tinggi permukaan, konsentrasi, bukaan katup, dan lain-lain. Sedangkan sinyal yang dipakai dalam sistem pengendalian dapat berupa sinyal listrik (4-20 mA atau 1-5 V) dan sinyal pneumatik (20-100 kPa). Sinyal ini menunjukkan informasi besaran fisik.
Control valve
Sinyal kendali Laju pemanas
(4 - 20 mA) (0 -500 kg/jam)
Gambar 2.11 Diagram blok.
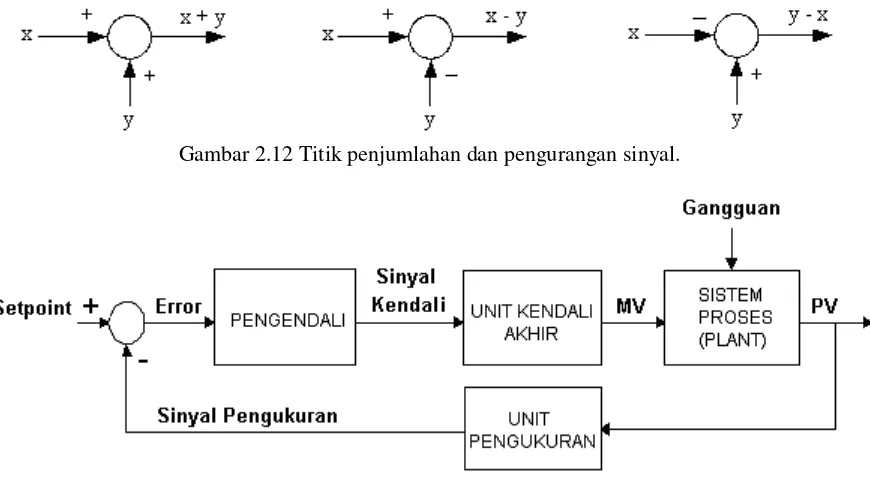
Titik penjumlahan atau pengurangan (summing junction) sinyal digambarkan sebagai bulatan dengan anak panah masuk dan keluar.
Gambar 2.12 Titik penjumlahan dan pengurangan sinyal.
Pengendalian Proses 26 Gambar 2.14. Diagram blok pengendalian umpan balik direct acting.
Perhatikan tanda (+) dan (-).
Gambar 2.15. Diagram blok pengendalian umpan maju.
Diagram blok sistem pengendalian umpan balik secara umum diperlihatkan seperti pada gambar 2.13. Perhatikan tanda (+) dan (-) pada bagian penjumlah antara setpoint sinyal pengukuran untuk membedakan antara pengendali direct acting dan reverse acting. Bila tidak ada keterangan lain, pengendali adalah reverse acting sesuai gambar 2.13.
1.10 DIAGRAM INSTRUMENTASI
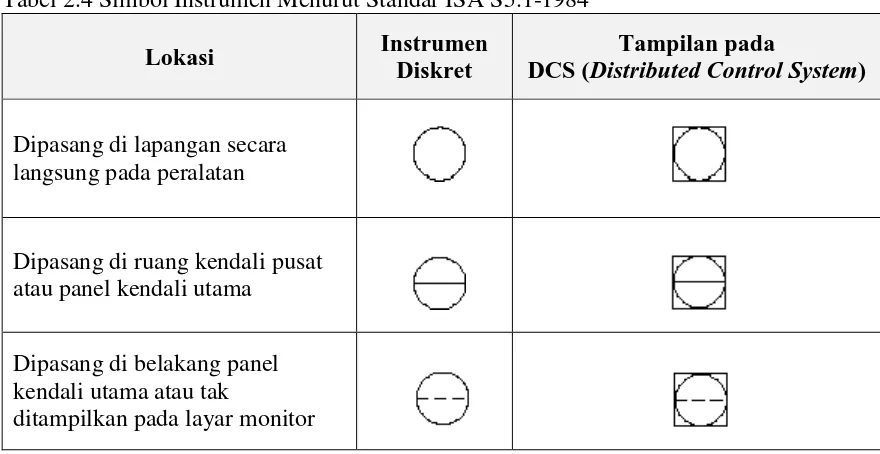
Pengendalian Proses 27 Tabel 2.4 Simbol Instrumen Menurut Standar ISA S5.1-1984
Lokasi Instrumen
Diskret
Tampilan pada
DCS (Distributed Control System)
Dipasang di lapangan secara langsung pada peralatan
Dipasang di ruang kendali pusat atau panel kendali utama
Dipasang di belakang panel kendali utama atau tak
ditampilkan pada layar monitor
Tabel 2.5 Simbol instrumentasi dan standar identifikasi ANSI/ISA S5.1-1984 (R 1992)
Variabel Proses
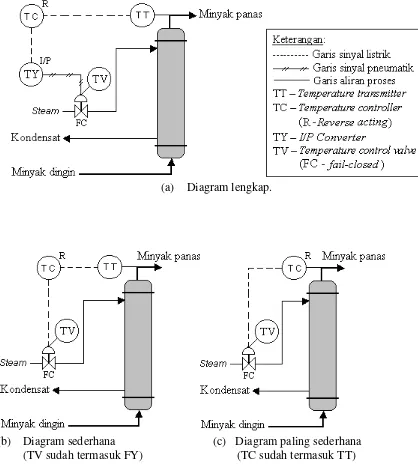
Pengendalian Proses 28 Contoh-2.2: Diagram Instrumentasi Pengendalian Suhu.
Pemanasan aliran minyak dalam sebuah alat penukar panas memakai aliran steam sebagai pemanas. Variabel terkendali adalah suhu minyak keluar. Variabel pengendali (manipulated variable) adalah aliran steam. (laju panas yang dipindahkan ke minyak dingin). Aksi penukar panas terhadap perubahan aliran steam adalah diret acting, sehingga pengendali harus reverse acting.
(a) Diagram lengkap.
(b) Diagram sederhana (c) Diagram paling sederhana
(TV sudah termasuk FY) (TC sudah termasuk TT)
Pengendalian Proses 29 Contoh-2.3: Diagram Instrumentasi Pengendalian Suhu dan Level Reaktor.
(a) Diagram lengkap
(b) Diagram disederhanakan
(c) Diagram paling sederhana
Gambar 2.18 Diagram instrumentasi lengkap pengendalian suhu dan level reaktor tangki. • Aksi reaktor (suhu) terhadap perubahan aliran steam adalah direct
ating, sehingga pengendali suhu harus reverse ating.
Pengendalian Proses 30 Contoh-2.4: Pengendalian Suhu Reaktor Tangki
Suhu reaksi dikendalilkan oleh aliran steam. Diinginkan suhu reaksi sebesar 120 oC. Gangguan terhadap suhu reaksi adalah: suhu dan laju alir umpan, konsentrasi umpan, suhu steam, dan kehilangan panas ke lingkungan.
Gambar 2.19 Diagram instrumentasi pengendalian umpan balik suhu reaktor tangki.
Gambar 2.20 Diagram blok pengendalian umpan balik suhu reaktor tangki Keterangan:
• c – suhu campuran reaksi. • m – laju alir steam.
• r – suhu campuran reaksi yang diinginkan. • y – suhu terukur
• u – sinyal kendali
Pengendalian Proses 31 Contoh-2.5: Pengendalian Umpan Maju Suhu Reaktor Tangki
Pengendalian suhu reaktor tangki seperti pada contoh-2.6 akan dikendalikan dengan pengendali umpan maju. Suhu reaksi dikendalilkan oleh aliran steam. Diinginkan suhu reaksi sebesar 120 oC. Gangguan terukur adalah: suhu dan laju alir umpan.
Gambar 2.21 Diagram instrumentasi pengendalian umpan maju suhu reaktor tangki.
Strategi Pengendalian Umpan Maju. Pengendalian umpan maju pada gambar 2.24 dan 2.25 menganggap gangguan hanya berasal dari laju alir umpan dan suhu umpan. Laju alir dan suhu berturut-turut dideteksi. Oleh transmiter (FT dan TT), dikirimkan sinyal pengukuran ke dalam feedforward control (TC). Dalam bagian ini dilakukan perhitungan matematik berdasar hubungan antara laju alir steam, laju alir, dan suhu umpan. Perubahan laju alir dan suhu umpan menyebabkan perubahan laju steam. Dengan demikian suhu produk akan tetap meskipun terjadi perubahan laju alir dan suhu umpan.
Pengendalian Proses 32 Contoh-2.6: Pengendalian Umpan Balik dan Umpan Maju
Gabungan dua strategi ini menghasilkan pengendalian suhu yang lebih sempurna.
.
Gambar 2.23 Diagram instrumentasi pengendalian umpan balik dan umpan maju.
Pengendalian Proses 33 SOAL-SOAL
A. URAIAN 1. Level Control-1
Sebuah tangki mempunyai aliran masuk dan keluar. Laju alir keluar berubah-ubah tergantung pada pemakaian. Level cairan dikendalikan dengan cara mengatur laju alir masuk sesuai pemakaian aliran keluar.
(a) Sebutkan apa yang menjadi: variabel proses, manipulated variable, dan gangguan.
(b) Buat diagram blok dan diagram instrumentasi sistem pengendalian.
Gambar 2.25 Sistem level cairan.
2. Level Control-2
Sebuah tangki mempunyai aliran masuk dan keluar. Laju alir masuk berubah-ubah tergantung proses sebelumnya. Level cairan dikendalikan dengan cara mengatur laju alir keluar sesuai perubahan alirna masuk.
(a) Sebutkan apa yang menjadi: variabel proses, manipulated variable, dan gangguan. (b) Buat diagram blok dan diagram instrumentasi
sistem pengendalian. 3. Pressure Control-1
Laju alir gas masuk ke dalam tangki dapat
berubah-ubah tanpa diketahui sebabnya. Tekanan dalam tangki gas dikendalikan dengan laju alir keluar.
(a) Sebutkan apa yang menjadi: variabel proses, manipulated variable, dan gangguan.
(b) Buat diagram blok dan diagram instrumentasi sistem pengendalian.
Gambar 2.26 Pengendalian tekanan gas.
4. Pressure Control-2
Laju alir gas keluar ke dalam tangki dapat berubah-ubah tanpa diketahui sebabnya. Tekanan dalam tangki gas dikendalikan dengan laju alir masuk.
(a)Sebutkan apa yang menjadi: variabel proses, manipulated variable, dan gangguan. (b)Buat diagram blok dan diagram instrumentasi sistem pengendalian.
5. Flow Control
Beda tekanan antara aliran masuk dan keluar dapat beruba-ubah. Laju alir keluar dikendalikan oleh hambatan aliran.
(a) Sebutkan apa yang menjadi: variabel proses, manipulated variable, dan gangguan.
Pengendalian Proses 34 Gambar 2.27 Pengendalian laju alir.
6. Temperature Control
Suhu dan laju alir fluida dingin dapat berubah-ubah. Suhu ke reaktor dikendalikan oleh aliran fluida panas.
(a) Sebutkan apa yang menjadi: variabel proses, manipulated variable, dan gangguan.
(b) Buat diagram blok dan diagram instrumentasi sistem pengendalian.
Gambar 2.28 Pengendalian suhu.
7. Perhatikan flash drum berikut. Agar proses dapat berjalan dengan baik diperlukan loop pengendalian. Level cairan dikendalikan oleh aliran produk bawah. Tekanan operasi dikendalian oleh aliran produk atas.
(a) Lengkapi gambar di samping dengan diagram instrumentasi untuk
pengendalian tersebut.
(b)Buat diagram blok sistem pengendalian tekanan.
Gambar 2.29 Pengendalian flash drum.
8. Reaksi polimerisasi monomer A berlangsung dalam reaktor CSTR yang dilengkapi jaket pendingin. Reaksi berlangsung endotermik. Kondisi proses yang diinginkan: volume konstan 100 L, suhu reaksi 80 oC, dan konversi A 90%.
Soal:
(a) Sebutkan besaran apa yang menjadi PV, MV, SP, dan gangguan/beban
(b) Buat diagram blok dan diagram instrumentasi sistem pengendalian.
Pengendalian Proses 35 9. Sebuah tangki pencampur digunakan untuk mengencerkan larutan asama setat. Karena konsentrasi larutan asam asetat yang masuk berubah-ubah, diperlukan pengendali yang mengatur laju alir air yang masuk ke tangki tersebut agar konsentrasi larutan tetap 25% dengan mengukur konduktivitas larutan yang keluar tangki.
(a) Sebutkan apa yang yang menjadi variabel proses (PV), variabel termanipulasi (MV), nilai acuan (SP), dan gangguan.
(b) Buat diagram blok dan diagram instrumentasi sistem pengendalian. `
10.Perhatikan reaktor yang dilengkapi pemanas berikut. Suhu, tinggi permukaan cairan, dan konsentrasi produk, harus dijaga tetap. Suhu dikendalikan oleh laju alir steam. Level dikendalikan oleh laju alir reaktan.
(a)Gambarkan diagram instrumentasi
(b)Gambarkan diagram blok pengendalian level
Gambar 2.31 Pengendalian reaktor tangki-2.
11.Pengenceran aliran umpan dengan pelarut dilakukan dengan tangki pencampur.
Gambar 2.32 Pengendalian pengenceran-1.
Berdasar gambar yang ada jawablah pertanyaan berikut. (a) Apa tujuan pengendalian proses tersebut.
(b) Apa variabel keluaran proses yang diukur?
(c) Apa variabel masukan proses yang dimanipulasikan? (d) Apa saja gangguan yang mungkin terjadi?
(e) Apa aksi sistem proses?
(f) Apa aksi control valve yang dipilih? Mengapa? (g) Apa aksi pengendali yang dipilih.
Pengendalian Proses 36 12. Perhatikan diagram instrumentasi proses pengenceran dalam tangki berikut. Dari
gambar ini, untuk masing-masing pengendalian:
Gambar 2.33 Pengendalian pengenceran-2.
Berdasar gambar yang ada jawablah pertanyaan berikut. (a) Apa tujuan pengendalian proses tersebut.
(b) Apa variabel keluaran proses yang diukur?
(c) Apa variabel masukan proses yang dimanipulasikan? (d) Apa saja gangguan yang mungkin terjadi?
(e) Apa aksi sistem proses?
(f) Apa aksi control valve yang dipilih? Mengapa? (g) Apa aksi pengendali yang dipilih.
(h) Buat diagram blok sistem pengendalian
13.Perhatikan diagram instrumentasi proses pemekatan cairan encer dalam evaporator.
Gambar 2.34 Pengendalian evaporator.
Berdasar gambar yang ada jawablah pertanyaan berikut. (a) Apa tujuan pengendalian proses tersebut.
(b) Apa variabel keluaran proses yang diukur?
(c) Apa variabel masukan proses yang dimanipulasikan? (d) Apa saja gangguan yang mungkin terjadi?
(e) Apa aksi sistem proses?
(f) Apa aksi control valve yang dipilih? Mengapa? (g) Apa aksi pengendali yang dipilih.
Pengendalian Proses 37 14.Sebuah sistem pengendalian level berikut.
Gambar 2.35 Pengendalian level cairan dalam tangki.
Berdasar gambar yang ada jawablah pertanyaan berikut. (a) Apa tujuan pengendalian proses tersebut.
(b) Apa variabel keluaran proses yang diukur?
(c) Apa variabel masukan proses yang dimanipulasikan? (d) Apa saja gangguan yang mungkin terjadi?
(e) Apa aksi sistem proses?
(f) Apa aksi control valve yang dipilih? Mengapa? (g) Apa aksi pengendali yang dipilih.
(h) Buat diagram blok sistem pengendalian
15.Sebuah tanur (furnace) dipakai untuk memanaskan aliran fluida proses dari suhu kamar hingga 300oC. Suhu fluida proses keluar dikendalikan oleh laju alir bahan bakar..
Gambar 2.36 Pengendalian tanur.
Pengendalian Proses 38 (a) Apa tujuan pengendalian proses tersebut.
(b) Apa variabel keluaran proses yang diukur?
(c) Apa variabel masukan proses yang dimanipulasikan? (d) Apa saja gangguan yang mungkin terjadi?
(e) Apa aksi sistem proses?
(f) Apa aksi control valve yang dipilih? Mengapa? (g) Apa aksi pengendali yang dipilih?
(h) Buat diagram blok sistem pengendalian
16.Perhatikan tiga metode pengendalian penukar panas (heat exchanger). Tujuan pengendalian adalah menjaga suhu proses keluar penukar panas pada nilai tertentu. Fluida proses keluar menjadi umpan reaktor. Suhu tersebut tidak boleh melebihi setpoint.
(a) Pengendalian Dasar
Apakah gain antara suhu fluida ke reaktor dan manipulated variable bernilai positif atau negatif? Aksi katup kencali jenis fail-closed (FC) atau fail-open (FO)? Mengapa?
Gambar 2.37 Pengendalian dasar penukar panas.
(b) Pengendalian dengan Aliran Pintas (bypass) Memakai Fluida Panas
Apakah gain antara suhu fluida ke reaktor dan manipulated variable bernilai positif atau negatif? Aksi katup kencali jenis fail-closed (FC) atau fail-open (FO)? Mengapa?
Pengendalian Proses 39 (c) Pengendalian dengan Aliran Pintas (bypass) Memakai Aliran Fluida Dingin
Apakah gain antara suhu fluida ke reaktor dan manipulated variable bernilai positif atau negatif? Aksi katup kencali jenis fail-closed (FC) atau fail-open (FO)? Mengapa?
Gambar 2.39 Pengendalian dengan aliran pintas fluida dingin.
(d) Dari ketiga strategi pengendalian tersebut di atas, manakah yang mempunyai respons paling cepat? Mengapa?
17.Pneumatic control valves dipakai untuk mengatur aliran pada penerapan berikut. (a) Tekanan steam dalam koil pemanas reaktor.
(b) Laju alir reaktan ke dalam reaktor polimerisasi. (c) Aliran keluaran pengolah tangki limbah ke sungai.. (d) Aliran air pendingin untuk kondensor distilasi.
Tentukan aksi control valve, air-to-open (AO) atau air-to-close (AC) dan jelaskan.
18.Diagram instrumentasi proses diperlihatkan pada gambar berikut. Steam dipakai menguapkan sebagian umpan dan produk cair dikeluarkan degan pompa. Terdapat control valve untuk steam (FV-2), produk uap (LV-1), produk cair (PV-1), aliran umpan (FV-1), dan steam
chest (FV-3) yang dipakai untuk mengalirkan uap secara cepat pada kondisi darurat. Tentukan aksi kelima control valve apakah fail-closed (FC) atau fail-open (FO) untuk kondisi berikut.
(a) Kondisi paling aman dicapai ketika
Pengendalian Proses 40 BAGIAN-2: SOAL PILIHAN GANDA
Sistem Proses
1. Variabel yang menjadi masukan sistem proses adalah … A. variabel keadaan
B. variabel proses C. variabel terkendali D. variabel tak dikendalikan E. variabel pengendali
2. Besaran yang menunjukkan keadaan proses adalah …. A. Variabel proses
B. Manipulatedvariable C. Gangguan
D. Beban E. setpoint
3. Besaran yang digunakan untuk mengendalikan keadaan proses adalah A. Variabel proses
B. Manipulatedvariable C. Gangguan
D. Beban E. setpoint
4. Besaran yang menjadi nilai acuan atau target yang diinginkan adalah A. variabel proses
B. setpoint
C. manipulatedvariable D. gangguan
E. beban
5. Anak panah pada diagram blok menunjukkan… A. aliran proses
B. aliran informasi atau sinyal C. aliran variabel proses D. tindakan
E. besaran variabel proses
6. Yang bukan sifat variabel proses … A. menyatakan keadaan sistem proses. B. sebagai variabel masukan.
C. dipengaruhi oleh gangguan D. bersifat dinamik.
E. sebagai variabel pengendali.
7. Yang bukan beban adalah…
A. gangguan yang perlu dihilangkan B. diperlukan dalam proses
C. mempengaruhi kecepatan respons variabel proses D. selalu ada dalam proses
Pengendalian Proses 41 Instrumentasi
8. Piranti yang secara langsung memungut informasi dari medium terukur adalah … A. transduser
B. transmiter C. sensor
D. elemen konversi. E. control valve
9. Piranti yang mengubah bentuk energi atau besaran fisik menjadi sinyal standar adalah A. sensor
B. transduser C. transmiter
D. elemen elektromekanik E. elemen konversi
10.Dalam sistem pengendalian proses dikenal unit atau piranti berikut. (1) Unit pengukuran
(2) Unit pengendali (3) Unit kendali akhir (4) Unit konversi
Untuk dapat mengendalikan proses, paling sedikit membutuhkan ... A. 1, 2, dan 3
B. 1 dan 3 C. 2 dan 4 D. 4
E. 1,2,3, dan 4
11.Transmiter berfungsi sebagai … A. pengubah besaran fisis B. pembawa singal kontrol C. mengirim sinyal kontrol
D. mengirimkan sinyal pengukuran E. mengirim sinyal setpoint.
12.Unit kendali akhir dalam sistem pengendalian proses, berfungsi sebagai A. pengubah sinyal kendali menjadi aksi pengendalian
B. pengubah sinyal kendali menjadi aksi pemantauan C. pengubah sinyal pengukuran menjadi sinyal kendali D. pengubah sinyal pengukuran menjadi aksi pengendalian E. penerima sinyal setpoint
13.Pada katup kendali jenis direct acting air-to-open, jika tekanan udara naik, A. stem ke atas, valve menutup
Pengendalian Proses 42 D. membuka lantas menutup E. tak terpengaruh
15.Jika stem pada katup kendali bergerak ke atas maka... A. katup membuka.
B. katup menutup. C. bersifat fail closed D. bersifat fail open E. bersifat air-to-open
16.Arti istilah direct-acting pada pengendali, adalah bila … A. PV naik, MV turun
B. PV turun, MV turun C. PV naik, SP naik D. PV naik, SP turun E. SP naik, MV turun
17.Pengendalian tinggi permukaan cairan memakai aliran keluar sebagai variabel pengendali. Maka aksi pengendali dan katup kendali berturut-turut adalah …
A. direct acting dan FO B. direct acting dan FC C. reverse acting dan FO
D. reverse acting dan FO atau FC E. reverse acting dan FC
18.Tampilan manipulated variable terbaca 60%. Ini berarti bukaan katup sebesar … A. 40%
B. 40% untuk aksi reverse acting C. 60%
D. 60% untuk aksi reverse acting E. tergantung nilai variabel proses
Pengendalian Umpan Balik
19.Pengendalian proses pada dasarnya adalah bertujuan untuk menjaga variabel A. keadaan proses.
B. setpoint C. gangguan D. beban E. pengendali
20.Ciri utama pengendalian umpan balik A. adanya offset
B. setpoint tetap
C. adanya umpan balik negatif D. adanya error
Pengendalian Proses 43 21.Pengendalian suhu minyak dengan penukar panas memakai air panas sebagai pemanas.
Suhu minyak keluar dikendalikan oleh laju air panas yang masuk. Maka … A. beban adalah laju alir minyak
B. setpoint adalah suhu minyak panas C. gangguan adalah laju alir air panas D. variabel proses adalah suhu air panas
E. error adalah beda antara suhu minyak keluar dan suhu air panas masuk
22.Dari langkah berikut: 1. mengevaluasi 2. mengoreksi 3. mengukur 4. membandingkan
Urutan langkah pengendalian umpan balik adalah… A. 1, 2, 3, 4
B. 2, 1, 3, 4 C. 3, 2, 1, 4 D. 3, 4, 1, 2 E. 4, 3, 1, 2
23.Besaran yang dikendalikan disebut... A. process variable.
B. manipulated variable. C. disturbance.
D. load. E. Setpoint
24.Langkah terpenting pada pengendalian A. mengukur dan membandingkan B. mengukur
C. membandingkan D. mengevaluasi E. mengoreksi
25.Ciri pengendalian umpan balik…
A. aksi koreksi bergantung perubahan variabel terkendali B. sinyal error selalu negatif
C. setpoint selalu tetap
D. terdapat offset bila terjadi perubahan beban E. selalu tak stabilan.
26.Kelebihan pengendalian umpan balik adalah sebagai berikut, kecuali ... A. dapat mengantisipasi gangguan yang tak terukur
B. tidak perlu mengetahui perilaku sistem proses secara tepat.
C. bersifat tegar (robust) yaitu tahan terhadap perubahan perilaku sistem proses. D. tindakan koreksi terjadi sebelum PV berubah.
Pengendalian Proses 44 Diagram Instrumentasi
Perhatikan diagram instrumentasi berikut. 27.FY-10001 adalah …
A. I/P converter.
B. Input Pressure converter. C. pemasok udara tekan. D. unit kalkulasi
E. unit kendali akhir
28.FC-10001 adalah … A. I/P converter.
B. High LowController. C. flow calculation. D. flow controller. E. flow calculation
29.Arti FT pada FT-10001 adalah… A. flowtransducer
B. flowtransmitter C. flowtemperature D. floattransmitter E. float transducer
Diagram instrumentasi berikut dipakai untuk menjawab soal nomor 17 hingga 20. Gas proses pada suhu dan tekanan tertentu dialirkan ke dalam quench tower untuk didinginkan dan dibersihkan. Sebagai pendingin adalah air yang disirkulasikan oleh pompa GA-108 dan didingin-kan oleh EA-116 dan EA-117.
Perhatikan pengendali TIC-114. 30.Variabel proses terkendali adalah
A. suhu aliran-7 B. suhu aliran-8 C. aliran-7 D. aliran-8
E. suhu dan laju aliran-8
31.Variabel pengendali adalah A. suhu aliran-6
B. aliran-7 C. aliran-8 D. suhu aliran-9
E. suhu dan laju aliran-7
32.Gangguan beban adalah A. suhu aliran-6
Pengendalian Proses 45 33.Aksi plant & pengendali berturut-turut
A. reverse acting dan direct acting B. reverse acting dan reverse acting C. direct acting dan reverse acting D. direct acting dan direct acting E. bukan salah satu di atas
34.Jika suhu aliran-8 terlalu tinggi, maka A. Bukaan control valve bertambah B. Bukaan control valve berkurang C. Aliran-6 berkurang
Pengendalian Proses 46
BAB-3 KARAKTERISTIK SISTEM PROSES
TUJUAN PEMBELAJARAN UMUM
Memahami karakteristik sistem proses untuk digunakan dalam menentukan parameter pengendali yang sesuai.
TUJUAN PEMBELAJARAN KHUSUS
Setelah menyelesaikan bab ini, mahasiswa diharapkan dapat: 1) Dapat menentukan karakteristik statik.
2) Dapat membuat sketsa grafik respons step.
3) Dapat mengidentifikasi persamaan matematik sistem. 4) Dapat menentukan gain dan konstanta waktu sistem orde-1. 5) Dapat menentukan aksi integral dalam proses.
6) Dapat menentukan gain, waktu mati dalam proses aliran cair dan padat.
7) Dapat menentukan gain, konstanta waktu dan waktu mati dari sketsa respons langkah. 8) Dapat menentukan apakah proses sukar, sedang, atau mudah dikendalikan dari bentuk
respons langkahnya.
Pengendalian Proses 47 3.1PERANCANGAN DAN PENGENDALIAN PROSES
Bab ini menjelaskan karakteristik sistem dinamik khususnya sistem proses. Meskipun demikian pemahamam ini dapat diterapkan pada sistem dinamik lain, misalnya control valve, sensor, transmiter, dan sistem lingkar tertutup (closed-loop system). Pemahaman terhadap karakteristik sistem sangat penting dalam kaitan dengan merancang, menganalisa, dan mengoperasikan sistem pengendalian proses. Meskipun demikian, cara pandang ahli pengendalian (control engineer) terhadap sistem khususnya sistem proses terkendali biasanya berbeda dengan ahli perancangan proses (process design engineer). Berikut contoh perbedaan cara pandang itu.
Tabel 3.1 Perbedaan cara pandang perancangan proses dengan pengendalian proses.
NO. PERANCANGAN PROSES PENGENDALIAN PROSES
1 Menitikberatkan pada laju produksi dan spesifikasi kualitas, yang biasa disebut “kondisi perancangan.”
Menitikberatkan pada eksistensi proses pada saat beroperasi, sebagai contoh mengurangi variasi umpan proses atau kondisi tak normal lain.
2 Menginginkan biaya investasi peralatan serendah mungkin dan umur peralatan selama mungkin.
Menginginkan biaya operasional proses serendah mungkin.
3 Variabel perancangan sebagai variabel bebas. Variabel lain yang diturunkan dari sini berlaku sebagai variabel terikat. Sebagai contoh, tekanan steam jenuh sebagai variabel bebas, sementara suhu menjadi variabel terikat.
Titik operasi pengendalian (misalnya, bukaan valve atau laju alir) sebagai variabel bebas. Sebagai contoh, tekanan steam menjadi variabel terikat selama operasional sebagai hasil dari bukaan valve atau laju alir dan suhu sebagai variabel bebas.
4 Menitikberatkan pada kondisi proses tunak (steady-state) yang menunjukkan kebutuhan operasi normal yang seharusnya.
Menitikberatkan pada kondisi dinamik atau transien yang menunjukkan perilaku proses selama beroperasi secara nyata.
Dalam teknologi proses, setiap proses memiliki karakteristik berbeda-beda. Dari cara pandang pengendalian proses, banyak karakteristik proses yang serupa meskipun berbeda proses. Sebagai contoh, proses pemanasan berbeda dengan proses pengenceran. Tetapi ditinjau dari cara pandang pengendalian, keduanya memiliki karakteristik respon dinamik yang serupa.
3.2SISTEM PROSES DALAM PENGENDALIAN UMPAN BALIK
Pengendalian Proses 48 penggerak pneumatik). Pada praktiknya, antara penggerak (pada sistem kendali) dan elemen regulasi (pada sistem terkendali) dibuat menjadi satu yang disebut unit kendali akhir atau elemen kendali akhir. Demikian pula antara elemen pengindera (pada sistem terkendali) dan transmiter (pada sistem kendali) dibuat menjadi satu dan disebut unit pengukuran. Di lapangan, unit pengukuran seringkali disebut transmiter saja. Dalam hal ini elemen pengindera sudah termasuk dalam transmiter.
Gambar 3.1 Sistem pengendalian umpan balik.
Gambar 3.2 Sistem pengendalian umpan balik ditinjau dari sistem kendali.
Ditinjau dari sudut pandang sistem kendali, pengendali mengeluarkan perintah ke sistem proses yang berada di lapangan lewat sinyal kendali dan menerima informasi variabel proses lewat sinyal pengukuran dari transmiter. Pengendali hanya “melihat” proses melalui informasi dari transmiter. Hubungan antara sinyal pengukuran dan variabel proses diperoleh dari kalibrasi transmiter. Demikian pula, pengendali hanya “memberi” aksi pengendalian proses lewat sinyal kendali. Hubungan antara sinyal kendali dan variabel
Variabel proses terkendali (controlled variable) Variabel pengendali
Pengendalian Proses 49 pengendali diperoleh dari kalibrasi elemen kendali akhir. Dengan demikian, dari sisi pengendali, sistem proses hanya dilihat sebagai hubungan antara masukan proses (sinyal kendali, u) dan keluaran proses (sinyal pengukuran, y).
3.2 SEKILAS RESPON PROSES
Bentuk respon keluaran y(t) akan berbeda tergantung masukan u(t). Untuk selanjutnya, jika tidak disebutkan secara khusus, dianggap respon step. Perubahan masukan dalam bentuk fungsi step.
> ∀
< ∀ =
0 0 0
) (
t A
t t
u (3.1)
Jika A = 1, disebut fungsi step satuan (unit step function) dan keluaran y(t) disebut respon step satuan (unit step response). Ini secara matematika sudah mencukupi. Lebih penting mengetahui perubahan keluaran dari nilai sebelumnya dari pada nilai sesungguhnya. Oleh sebab itulah mengapa dibuat u(t) = 0 pada waktu t < 0.
3.2.1 SISTEM TANPA REGULASI DIRI (INTEGRATOR)
Gambar 3.2 memperlihatka respon sistem tanpa regulasi (non-self-regulating) atau tak mantap (integrator). Keluaran secara kontinyu naik atau turun pada kemiringan tetap hingga mencapai batas kendala sistem. Sebagai contoh adalah level cairan dalam bejana ketika laju alir keluar tetap tetapi aliran masuk berubah sehingga lebih besar dari pada aliran keluar. Level cairan naik terus hingga luber dari tangki.
Pengendalian Proses 50 3.2.2 SISTEM DENGAN REGULASI DIRI ORDE SATU
Gambar 3.4 memperlihatkan respon sistem orde satu, yang juga disebut respon eksponensial. Karakteristik penting respon ini adalah reaksi cepat pada saat awal, kemudian kemiringannya mengecil dan akhirnya nol, sehingga tercapai kondisi steady state baru. Sebagai contoh, pemanasan air dalam ketel. Ketika pemanas dinyalakan, energi panas masuk ke air hingga tercapai suhu tertentu yang menghasilkan respon sistem orde satu. Respon sistem tidak berubah seketika akibat adanya kapasitansi termal ketel dan air. Suhu akan tetap ketika energi panas masuk sama dengan energi panas keluar.
Gambar 3.4 Sistem Orde Satu
3.2.3 SISTEM DENGAN REGULASI DIRI ORDE DUA SANGAT TEREDAM Gambar 3.5 memperlihatkan respon orde dua sangat teredam (over-damped). Karakteristik penting pada respon ini adalah, respon lambat di awal, kemudian diikuti respon yang mirip orde satu. Banyak proses industri memperlihatkan tipe respon ini. Sebagai contoh, pemanasan campuran reaksi secara tidak langsung. Steam memanaskan air. Air panas selanjutnya memanaskan campuran reaksi. Perubahan laju steam lebih dulu menaikkan suhu air sebelum berpengaruh pada suhu campuran reaksi.
Pengendalian Proses 51 3.2.4 SISTEM DENGAN REGULASI DIRI ORDE DUA TEREDAM
Gambar 3.6 memperlihatkan respon orde dua teredam (under-damped). Ciri respon ini adalah terjadi overshoot yang melewati nilai tunak (steady-state) dan diikuti osilasi dengan amplitudo berangsur mengecil sampai hilang. Seperti pada respon sangat teredam, terdapat respon awal yang lambat. Respon tipe ini adalah karakteristik sistem dengan kelembamam (inersia), misalnya perubahan suhu reaksi oleh perubahan konsentrasi reaktan.
Gambar 3.6 Respon orde dua teredam
3.2.5 WAKTU MATI
Waktu mati adalah waktu antara aksi (perubahan sinyal kendali) hingga munculnya reaksi (perubahan sinyal pengukuran) Gambar 3.7 diperlihatkan respon waktu mati (deadtime) atau respon kelambatan transpor (transport-lag response). Di sini respon keluaran muncul setelah waktu tertentu yaitu sebesar waktu mati. Contoh pengangkutan material (sehingga disebut kelambatan transpor). Jika terjadi perubahan berat aliran material di ujung konveyor akan dibutuhkan waktu untuk sampai di sensor berat.
Pengendalian Proses 52 Table 3.2 Rangkuman sistem dinamik dasar.
Elemen Respon
Awal Osilasi Mempunyai Nilai Tunak
Integrator Cepat Tidak Tidak
Orde-satu Cepat Tidak Ya
Orde dua sangat teredam Lambat Tidak Ya
Orde dua teredam Lambat Ya Ya
Waktu mati Tidak ada Tidak Ya
Dalam kondisi nyata, respon step dapat terlihat berbeda dari elemen sederhana tersebut. Karena pada umumnya berupa kombinasi beberapa elemen sederhana.
Contoh-3.1
Respon step yang diperlihatkan dalam gambar 3.8 memiliki karakteristik berikut: (a) memerlukan waktu beberapa saat sebelum terjadi respon;
(b) respon awal adalah berangsur-angsur;
(c) respon berlanjut naik terus hingga tak terbatas; (d) terdapat osilasi.
Gambar 3.8 Contoh respon sistem
Dari karakterisitk elemen sederhana, dapat disimpulkan hal-hal sebagai berikut: • Karakteristik (a) menunjukkan elemen waktu mati;
• Karakteristik (b) dan (d) menunjukkan elemen orde dua teredam. • Karakteristik (c) menunjukkan elemen integrator;
Berdasar respon step dapat diturunkan model matematika sistem kompleks dengan menganggap sebagai gabungan antara elemen orde satu dan waktu mati (First Order Plus Dead Time, FOPDT). Dengan model yang diperoleh dapat dianalisa, dirancang, dan disimulasikan.
3.3 ELEMEN DASAR