ANTENA MENGGUNAKAN
PID-LEAD COMPENSATOR
(IMPLEMENTATION OF TRACKING CONTROL SYSTEM FOR ANTENNA POINTING
USING PID-LEAD COMPENSATOR)
Moh. Imam Afandi
Puslit KIM-LIPI, Kompleks Puspiptek, Serpong Tangerang 15314
Kata kunci : Pengarahan antena, kontrol tracking, azimuth-elevasi, pitch, roll, PID-lead compensator.
Keywords : Antenna pointing, tracking control, elevation-azimuth, pitch, roll, PID-lead compensator
Tanggal masuk : 30 Juni 2005 Tanggal diterima : 11 Oktober 2005
1. PENDAHULUAN
Sistem pengarahan antena yang tepat pada objek sasaran sangat diperlukan dalam menerima dan/atau mengirimkan sinyal data dengan baik[1]. Pada antena kapal sering terjadi permasalahan gangguan pengarahan yang disebabkan oleh gangguan pada landasan. Gangguan pada landasan ini terjadi karena adanya ombak dan/atau perubahan haluan pada kapal. Gangguan pada landasan dapat didefinisikan menjadi tiga bentuk gangguan yaitu pitch(angguk), roll(miring) dan
yaw(putar). Untuk gangguan pitch dan roll pada kapal biasanya sering terjadi akibat adanya gelombang laut/ombak, sedangkan untuk gangguan yaw pada kapal sangat dipengaruhi oleh perubahan arah kemudi kapal sehingga hal ini dapat diprediksi sebelumnya.
Untuk mengeliminasi gangguan pitch dan gangguan
roll, telah dibuat suatu model on-line sistem kontrol
tracking pengarahan antena dengan pergerakan
revolute(rotasi) dua derajad kebebasan yang terdiri dari pergerakan elevasi(berotasi sejajar sumbu landasan) dan pergerakan azimuth (berotasi tegak lurus sumbu
landasan). Langkah pertama yang harus ditempuh adalah dengan melakukan pemodelan kinematika sistem pada pengarahan antena dan identifikasi sistem pada motor azimuth-elevasi antena. Selanjutnya dalam penerapan sistem kontrolnya, digunakan kontroler PID-lead compensator yang merupakan gabungan dari kontroler PID dan kompensator lead. Pada permasalahan kontrol
tracking, Penambahan kompensator lead berfungsi sebagai prediksi maju dari setiap respon yang terjadi sehingga dapat mengatasi kelemahan faktor lagging pada kontroler PID. Kemudian dalam pengujiannya akan dibandingkan sistem kontrol tracking pengarahan antena menggunakan PID-lead compensator dengan PID konvensional. Respon waktu yang cepat untuk rotasi elevasi dan azimuth dengan kesalahan seminimal mungkin terhadap arah acuan merupakan kinerja yang ingin dicapai dari sistem kontrol tracking pada pengarahan antena.
INTISARI
Telah dibuat sistem kontrol pengarahan antena yang digunakan untuk mempertahankan pengarahan yang tetap walaupun diberikan gangguan pitch dan roll pada landasannya. Terlebih dahulu dilakukan pemodelan kinematika sistem pada pengarahan antena dan identifikasi sistem pada motor azimuth-elevasi antena. Sistem kontrolnya menggunakan PID-lead compensator yang merupakan gabungan dari kontroler PID dan kompensator lead. Pada permasalahan kontrol tracking, Penambahan kompensator lead berfungsi sebagai prediksi maju dari setiap respon yang terjadi sehingga dapat mengatasi kelemahan faktor lagging pada kontroler PID konvensional. Hasil pengujian menggunakan kontroler PID-lead compensator mampu meningkatkan presisi pengarahan sampai sebesar 1.74 kali pada sistem elevasi dan 1.81 kali pada sistem azimuth jika dibandingkan dengan kontroler PID konvensional Ziegler-Nichols.
ABSTRACT
Implementasi Sistem Kontrol Tracking Pada Pengarahan Antena
Menggunakan PID-Lead Compensator Moh. Imam Afandi
2. DASAR TEORI
Untuk menyelesaikan permasalahan kinematika, harus mempunyai pengetahuan dasar mengenai matrik transformasi homogenous[2]. Selanjutnya, penyelesaian permasalahan kinematika dari suatu sistem dapat diselesaikan dengan menggunakan konvensi parameter
Denavit-Hartenberg[3]. Konvensi parameter Denavit-Hartenberg digunakan untuk mendapatkan matrik transformasi homogeneous i1
i
A dari setiap susunan sendi yang kemudian digunakan untuk menghitung persamaan kinematika maju 0 1
1 0 ... n
n n A A
T , yang memberikan posisi dan orientasi dari kerangka ujung terhadap kerangka dasar. Hasil perkalian matrik homogeneous 0
n
T ini memiliki vektor-vektor yang relatif terhadap sumbu utama yang dapat dijabarkan sebagai berikut :
Dari parameter-parameter pada Persamaan (2) selanjutnya dapat diturunkan persamaan model kinematika sesuai dengan sistem yang didisain .
Kontroler PID yang digunakan merupakan kontroler PID digital menggunakan transformasi Euler-Backward[4],
( ) ( 1) . ( ) . ( ) 2( 1) ( 2)
Kompensator lead yang digunakan untuk memberikan prediksi maju dan mempercepat respon
transient sistem mempunyai fungsi alih sebagai berikut[5]:
T
Pergeseran fase maksimumnya (m) didefinisikan
melalui persamaan,
) dengan j = konstanta imaginer.
2. PERANCANGAN SISTEM
Model sistem yang dibuat menggunakan dua buah motor DC gearbox dimana masing-masing motor berfungsi sebagai penggerak elevasi dan azimuth dari pengarahan antena. Pada landasan antena dibuatkan dudukan dinamis yang dapat menyebabkan sistem mengangguk dan sistem menjadi miring. Dudukan yang dinamis ini merepresentasikan gangguan pitch(angguk) dan gangguan roll(miring) yang masing-masing gangguan ini telah dipasang sensor encoder. Selanjutnya struktur kontrol PID dengan lead compensator pada sistem tracking antena ini diberikan pada Gambar 1.
Dari skema sistem kontrol pada Gambar 1, gangguan
pitch dan gangguan roll menyebabkan terjadinya perubahan sudut elevasi dan sudut azimuth-nya. Untuk dapat mengkompensasi persamaan gerak antena di atas maka perlu dilakukan pemodelan kinematika sistem seperti yang diberikan pada Gambar 2.a) dengan sumbu koordinat setiap sendi ditentukan seperti yang diberikan pada Gambar 2.b).
Hasil dari pemodelan kinematika sistem pada Gambar 2. akan didapatkan nilai parameter D-H seperti yang diberikan pada Tabel 1.
Tabel 1. Parameter D-H Pada Sistem Kontrol Pengarahan Antena
i Sendi ai αi di θi
1 Pitch 0 -900 0 θ1
2 Roll 0 900 0 θ2+900
3 Azimuth 0 900 L θ3+1800
Gambar 1. Skema Sistem Kontrol Tracking Antena menggunakan PID-Lead Compensator
(a)
(b)
Gambar 2. a) Susunan Sendi Sistem Pengarahan Antena b) Susunan Sumbu Koordinat Sendi
Maka dengan memasukkan Tabel 1. ke dalam Persamaan (1) akan didapatkan,
1 0 0 0
0 0 1 0
0 cos 0 sin
0 sin 0 cos
1 1
1 1
1
A
1 0 0 0
0 0 1 0
0 sin 0 cos
0 cos 0 sin
2 2
2 2
2
A
1 0 0 0
0 1 0
0 cos 0 sin
0 sin 0 cos
3 3
3 3
3
L
A
1 0 0 0
0 1 0 0
0 0 cos sin
0 0 sin cos
4 4
4 4 4
A
dengan memisalkan cos θi = ci dan sin θi = si , maka didapatkan hasil perkalian matrik pergerakan kinematika sistem,
pengarahan antena
Pitch
Roll Azimuth
Elevasi
L
x2
y2
z2
z1
y1
y3
x3
z3
z4
x4
y4
Implementasi Sistem Kontrol Tracking Pada Pengarahan Antena
Selanjutnya dengan tetap mengacu pada Gambar 2., maka persamaan sudut pengarahan antena terhadap landasan sistem diwakili oleh sumbu x4 dan kolom
pertama pada Persamaan (3) merupakan representasi arah x4 terhadap sumbu koordinat landasan.
Untuk mengetahui berapa besar perbedaan simpangan sudut elevasi dan azimuth-nya saat terjadi gangguan pitch dan roll dapat dijelaskan sebagai berikut,
x4 saat θ1= θ1=0 adalah
selisih sudut elevasi = sudut elevasi tanpa gangguan – sudut elevasi dengan gangguan sudut azimuth dengan gangguan
Selanjutnya untuk algoritma pemrogramannya, menggunakan perangkat lunak yang dibuat dari Borland C++Builder 6.0 sebagai supervisory control[6] dan dijalankan pada PC Pentium III kecepatan 1.2 GHz. Kemudian untuk interfacing-nya menggunakan double PPI Card dengan AD/DA resolusi 8 bit.
3. IDENTIFIKASI SISTEM
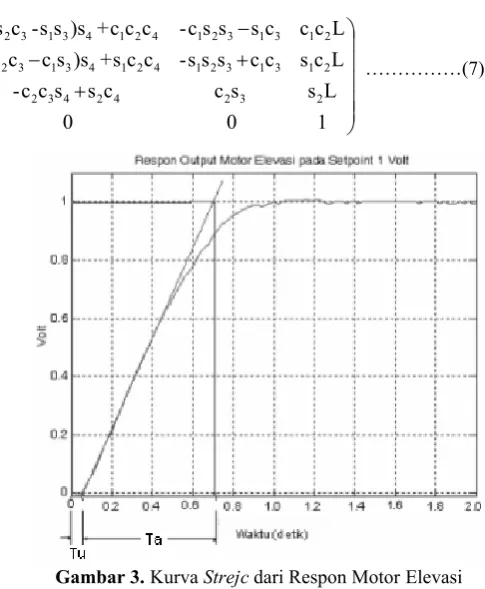
Identifikasi ini dilakukan dengan memberikan masukan step pada sistem pengaturan posisi plant lup tertutup yang digunakan untuk mendapatkan fungsi alih model. Untuk identifikasi motor elevasi telah didapatkan hasil respon terhadap sinyal masukan step dan kurva
Strejc seperti yang diberikan pada Gambar 3.
Dari Gambar 3. didapatkan, Tu = 0.05 detik Ta =
0.675 detik. Kemudian dengan menggunakan analisis identifikasi Strejc[7] untuk menentukan fungsi alih plant, maka perlu diketahui tabel Strejc seperti yang diberikan pada Tabel 2.
Tabel 2. Tabel Parameter Identifikasi Strejc
Gambar 3. Kurva Strejc dari Respon Motor Elevasi Terhadap Masukan Step
Sehingga hasil perhitungan yang didapatkan dari data Tabel 2. dapat dimasukkan ke dalam persamaan fungsi alih plant,
N
maka berdasarkan Persamaan (10) akan didapatkan fungsi alih lup tertutup(CLTF)-nya sebagai berikut : CLTF motor elevasi :
1
Kemudian fungsi alih plant motor elevasi ditentukan sebagai berikut:
)
Fungsi alih plant motor elevasi :
s
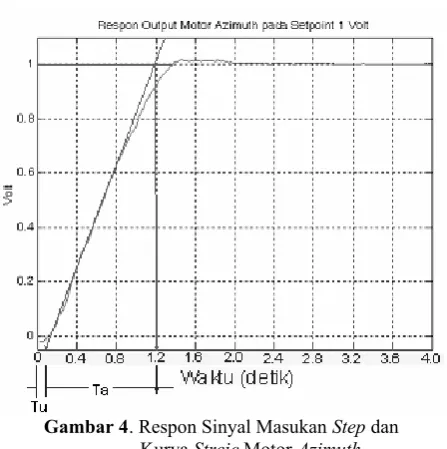
Untuk identifikasi motor azimuth telah didapatkan hasil respon terhadap sinyal masukan step dan kurva
Gambar 4. Respon Sinyal Masukan Step dan Kurva Strejc Motor Azimuth
Dari Gambar 4. didapatkan, Tu = 0.088 detik Ta =
1.098 detik. Kemudian dengan tetap menggunakan cara yang sama seperti pada identifikasi motor elevasi, selanjutnya akan didapatkan,
Fungsi alih motor azimuth :
4. DISAIN KOMPENSATOR SISTEM
Untuk motor elevasi, dirancang spesifikasi sistem dengan error steady state terhadap unit ramp = 0.02 dan maksimum overshoot < 25 %. Sehingga berdasarkan fungsi alih motor elevasi pada Persamaan (11), dapat dihitung penguatan minimum agar sesuai dengan error steady state,
02
seperti yang diberikan pada Gambar 5.
Dari Gambar 5. didapatkan hasil gain margin(GM) =
Infinity dan phase margin(PM) = -1440 -(-1800) = 360. Sedangkan syarat kestabilan fase suatu margin paling sedikit mempunyai sudut sebesar 450. Sehingga untuk mencapai kestabilan tanpa penurunan penguatan, diperlukan sudut fase yang lebih besar dari sudut fase minimum agar frekuensi crossover penguatan menjadi bergeser ke kanan.
Gambar 5. Bode Plot KGe(s) Sistem Elevasi
Sehingga ditentukan sudut fase sebesar 580 dengan melakukan pergeseran sudut fase sebesar 220. Berdasarkan Persamaan (5), dari hasil pergeseran sudut fase(φm) dapat dihitung konstanta kompensator(α) sebesar
0.4549. Kemudian berdasarkan Persamaan (6) dapat dihitung 1 = 1.4827 yang digunakan untuk memperoleh magnitude penguatan
db j
G1( ) 1.4827 dengan frekuensi crossover c =
42 rad/sec. Selanjutnya dapat dihitung
33
diperoleh dari 88
4549
berdasarkan Persamaan (4), didapatkan fungsi alih kompensator lead untuk motor elevasi
menjadi
diimplementasikan ke pemrograman komputer, fungsi alih kompensator untuk motor elevasi diubah ke dalam persamaan differensi dengan menggunakan transformasi
Euler-Backward,
1
dimana, r = sudut referensi + sudut perubahan d = keluaran sinyal kompensator Ts = waktu cuplik
Implementasi Sistem Kontrol Tracking Pada Pengarahan Antena
Menggunakan PID-Lead Compensator Moh. Imam Afandi
Untuk motor azimuth, dirancang spesifikasi sistem yang sama dengan motor elevasi yang kemudian dipilih K = 60, sehingga didapatkan fungsi alih
s s
s
KGa
186 . 1 096 . 0
60 )
( 2
dengan diagram Bode seperti yang diberikan pada Gambar 6.
Dari Gambar 6. didapatkan hasil gain margin(GM) =
Infinity dan phase margin(PM) = -1520-(-1800) = 280. Kemudian dengan cara yang sama seperti pada disain kompensator lead untuk motor elevasi, akan didapatkan fungsi alih kompensator lead untuk motor azimuth
menjadi
25 . 66
69 . 26 . 150 ) (
s s s
Da dan
150 5 . 4003
) 1 ( 150 ) 1 ( ) ( ) 1 25 . 66 ( ) (
s s
T
k d k
r k r T k
d
Gambar 6. Bode Plot KGa(s) Sistem Azimuth
5. HASIL PENGUJIAN DAN ANALISIS SISTEM
Telah dilakukan dua pengujian sistem kontrol pada
tracking antena ini, yaitu pengujian kontrol PID konvensional menggunakan Ziegler Nichols dan
PID-Lead compensator. Pemberian frekuensi gangguan pada pengujian sistem kontrol ini dipilih antara 0.2 - 0.3 Hz untuk merepresentasikan gangguan ombak yang tidak terlalu cepat.
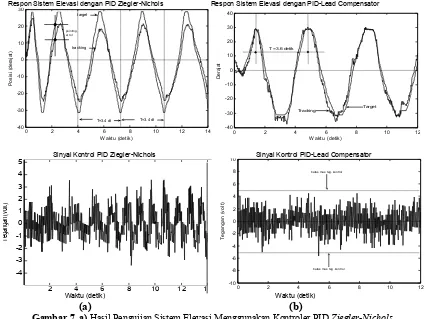
Untuk sistem elevasi, didapatkan hasil untuk pengujian sistem kontrol PID Ziegler-Nichols dengan
rata-rata kesalahan pengarahan(mean pointing error) sebesar 4.900 dan maksimum kesalahan pengarahan (maximum pointing error) sebesar 11.200 seperti yang diberikan pada Gambar 7.a). Kemudian untuk pengujian kontroler PID-Lead compensator dihasilkan mean pointing error sebesar 2.810 dan maximum pointing error
sebesar 8.800 seperti yang diberikan pada Gambar 7.b).
Respon Sistem Elevasi dengan PID Ziegler-Nichols Respon Sistem Elevasi dengan PID-Lead Compensator
0 2 4 6 8 10 12 14
-40 -30 -20 -10 0 10 20 30
Waktu (detik)
P
o
s
is
i
(d
e
ra
ja
t)
T=3.4 dt T=3.4 dt
pointing error
tracking target
0 2 4 6 8 10 12
-40 -30 -20 -10 0 10 20 30 40
Waktu (detik)
D
e
ra
ja
t
Target Tracking
T = 3.6 detik
Sinyal Kontrol PID Ziegler-Nichols Sinyal Kontrol PID-Lead Compensator
2 4 6 8 10 12 14
-4 -3 -2 -1 0 1 2 3 4 5
Te
ga
ng
an
(v
ol
t)
-100 2 4 6 8 10 12
-8 -6 -4 -2 0 2 4 6 8 10
Waktu (detik)
T
e
g
a
n
g
a
n
(
v
o
lt
)
batas max. teg. kontrol
batas max. teg. kontrol
Waktu (detik) Waktu (detik)
(a)
(b)
Gambar 7. a) Hasil Pengujian Sistem Elevasi Menggunakan Kontroler PID Ziegler-Nichols
Hasil yang diberikan pada Gambar 7.a), dapat dilihat bahwa respon sinyal tracking pada sistem elevasi dengan PID Ziegler-Nichols tidak cukup mampu dalam mengikuti sinyal target sehingga seolah-olah sinyal tracking
mempunyai atenuasi yang lebih kecil dari sinyal target. Kemudian untuk hasil yang diberikan pada Gambar 7.b),
dapat dilihat bahwa respon sinyal tracking pada sistem elevasi dengan PID-Lead compensator lebih mampu mendekati sinyal target jika dibandingkan dengan PID
Ziegler-Nichols. Sehingga terlihat hampir tidak ada penurunan atenuasi antara sinyal tracking dengan sinyal target.
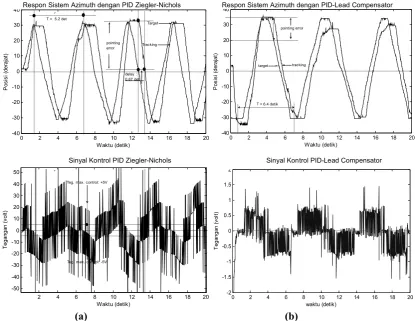
Respon Sistem Azimuth dengan PID Ziegler-Nichols Respon Sistem Azimuth dengan PID-Lead Compensator
0 2 4 6 8 10 12 14 16 18 20 -40
-30 -20 -10 0 10 20 30 40
Waktu (detik)
P
o
s
is
i
(d
e
ra
ja
t)
pointing error
delay : 0.67 det T = 5.2 det
Target
Tracking
0 2 4 6 8 10 12 14 16 18 20 -40
-30 -20 -10 0 10 20 30 40
Waktu (detik)
P
o
s
is
i
(d
e
ra
ja
t)
pointing error
tracking target
T = 6.4 detik
Sinyal Kontrol PID Ziegler-Nichols Sinyal Kontrol PID-Lead Compensator
2 4 6 8 10 12 14 16 18 20 -50
-40 -30 -20 -10 0 10 20 30 40 50
Waktu (detik)
T
e
g
a
n
g
a
n
(
v
o
lt
)
Teg. max. control: +5V
Teg. max. control: -5V
0 2 4 6 8 10 12 14 16 18 20 -2
-1.5 -1 -0.5 0 0.5 1 1.5 2
waktu (detik)
T
e
g
a
n
g
a
n
(
v
o
lt
)
(a)
(b)
Gambar 8. a) Hasil Pengujian Sistem Azimuth Menggunakan Kontroler PID Ziegler-Nichols
b) Hasil Pengujian Sistem Azimuth Menggunakan Kontroler PID-Lead Compensator
Untuk sistem azimuth, didapatkan hasil untuk pengujian sistem kontrol PID Ziegler-Nichols dengan
mean pointing error sebesar 13.980 dan maximum pointing error sebesar 36.820 seperti yang diberikan pada Gambar 8.a). Kemudian untuk pengujian kontroler
PID-Lead compensator ini memberikan respon yang lebih baik dengan mean pointing error sebesar 7.700 dan maximum pointing error sebesar 20.110 seperti yang diberikan pada Gambar 8.b).
Hasil yang diberikan pada Gambar 8.a) dan 8.b), dapat dilihat bahwa sistem azimuth lebih lembam daripada sistem elevasi. Hal ini disebabkan oleh disain konstruksi sistem azimuth yang terletak pada bagian bawah menggerakkan sistem elevasi yang terletak sehingga beban yang bekerja pada sistem azimuth lebih besar dari sistem elevasi. Walaupun demikian, hasil respon sinyal tracking terhadap sinyal target yang didapatkan dengan kontroler PID-Lead compensator
masih tetap lebih baik jika dibandingkan dengan PID
Ziegler-Nichols.
Dengan melihat mean pointing error(MPE) dari pengujian kontroler PID Ziegler-Nichols(PID-ZN) dengan
PID-Lead compensator(PID-LC), maka dengan
menggunakan kontroler PID-Lead compensator mampu memberikan mean pointing error lebih kecil daripada kontroler PID Ziegler-Nichols. Sehingga dengan menggunakan metode perbandingan MPE diperoleh,
Sistem elevasi = 1.74
81 . 2
9 . 4
0 0
ZN PID elevasi MPE
LC PID elevasi
MPE ,
dan
Sistem azimuth = 1.81
70 . 7
98 . 13
0 0
ZN PID azimuth MPE
Implementasi Sistem Kontrol Tracking Pada Pengarahan Antena
Menggunakan PID-Lead Compensator Moh. Imam Afandi
KESIMPULAN
Dari hasil pengujian dan analisis sistem dapat disimpulkan bahwa sistem pengarahan antena menggunakan PID-Lead compensator mampu memberikan mean pointing error sebesar 2.810 pada sistem elevasi dan 7.700 pada sistem azimuth. Sedangkan pada PID-Ziegler Nichols hanya mampu memberikan
mean pointing error sebesar 4.900 pada sistem elevasi dan
13.980 pada sistem azimuth. Sehingga kinerja yang dicapai oleh kontroler PID-Lead compensator dapat meningkatkan presisi pengarahan sampai sebesar 1.74 kali pada sistem elevasi dan 1.81 kali pada sistem
azimuth-nya jika dibandingkan dengan kontroler PID
Ziegler-Nichols.
DAFTAR PUSTAKA
[1] Maral, G., and Bousquet, M., 2000. Satellite Communications Systems : Systems, Technique and Technology, Third Edition, John Wiley & Sons, Chichester, New York.
[2] Selig, J.M., 1992. Introductory Robotics, Prentice Hall International Ltd., UK.
[3] Sciavicco, L., Siciliano, B., 1996. Modeling And Control of Robot Manipulators, McGraw Hill Companies, Inc, New York.
[4] Kuo, Benjamin C, 2003. Modern Control Systems, 11th Edition, Prentice Hall, New York.
[5] Ogata, Katsuhiko, 1997. Teknik Kontrol Otomatik. Jilid 1 & jilid 2, Edisi Kedua, Penerbit Erlangga, Jakarta.
[6] Miano, John & Cabanski, Thomas, 1997. Borland C++Builder How-To, Sams Publishing,.