Pusat pengembangan pendidikan
Dan aktivitas istruksional
p3ai@its.ac.id
Telp. : 031-5994419
PETA KOMPETENSI
PEMBELAJARAN
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
( P3AI – ITS )
Syamsul Arifin
syamp3ai@its.ac.id
HP:081-2354-2233
Apakah ilmu tidak
berstruktur ?...
Apakah kompetensi
Star
Identifikasi Kebutuhan Belajar
TIU
→
beberapa TIK
Peta Kompetensi Pembelajaran
GBPP
SAP
Bahan Ajar
Kontrak Kuliah
Silabus
Proses Pembelajaran
Evaluasi
(Instructional Research)
End
Desain Instruksional
Rencana
Pembelajaran
Kompetensi→
Sub-Kompetensi
Re-Konstruksi
MK
Asesmen
Monitoring
Peta Kompetensi,
GBPP,
SAP,
Silabus,
Kontrak Perkuliahan,
Rencana Evaluasi.
Rencana
Pembelajaran (RP)
Rencana Pembelajaran
Minimum yang diperlukan adalah
(sesui PP No. 19 tahun 2005, Pasal 20)
:
1.Tujuan Pembelajaran
Matakuliah/Kompetensi,
2.Bahan Pelajaran,
3.Metode Pembelajaran,
4.Sumber belajar,
5.Asesmen
Perlu ditambahkan :
1.Indikator Pencapaian Kompetensi,
2.Estimasi Waktu,
Mengidentifikasi semua prilaku / kompetensi
yang harus dikuasai mahasiswa,
Menentukan titik awal proses pembelajaran
(melalui penentuan perilaku awal mahasiswa),
Menentukan urutan pelaksanaan
pembelajaran,
Mempermudah untuk melakukan rekonstruksi
kompetensi mata kuliah
.
2 Syarat yang harus dimiliki untuk
merancang Peta Kompetensi ;
1. Menguasai
Keilmuan/Bidang tertentu,
(
syarat perlu
),
2.Mengerti Kaidah-kaidah
Pendidikan, (
syarat cukup
).
Sy
amsu
Peta Kompetensi
Penjabarkan kemampuan akhir Mhs /
perilaku umum / TIU / GOL / Kompetensi
Kemampuan khusus/ perilaku khusus /
TIK / SOL / Elemen Kompetensi
L
og
is
dan
S
ist
ema
tis
TIU
1
2
6
7
8
9
10
11
12
13
14
15
garis entry behaviour
Peta kompetensi
3
4
5
2 Pendekatan Merancang
Analisis / Peta Pembelajaran
Sy
amsul
Ari
fi
n
1. Pendekatan Bahan Pelajaran,
(
content base
),
2. Pendekatan Kompetensi
(
competency base
).
content base
Syamsul Arifin
Tujuan Pembelajara :
Mahasiswa mampu
melakukan
perancangan dan
menganalisis
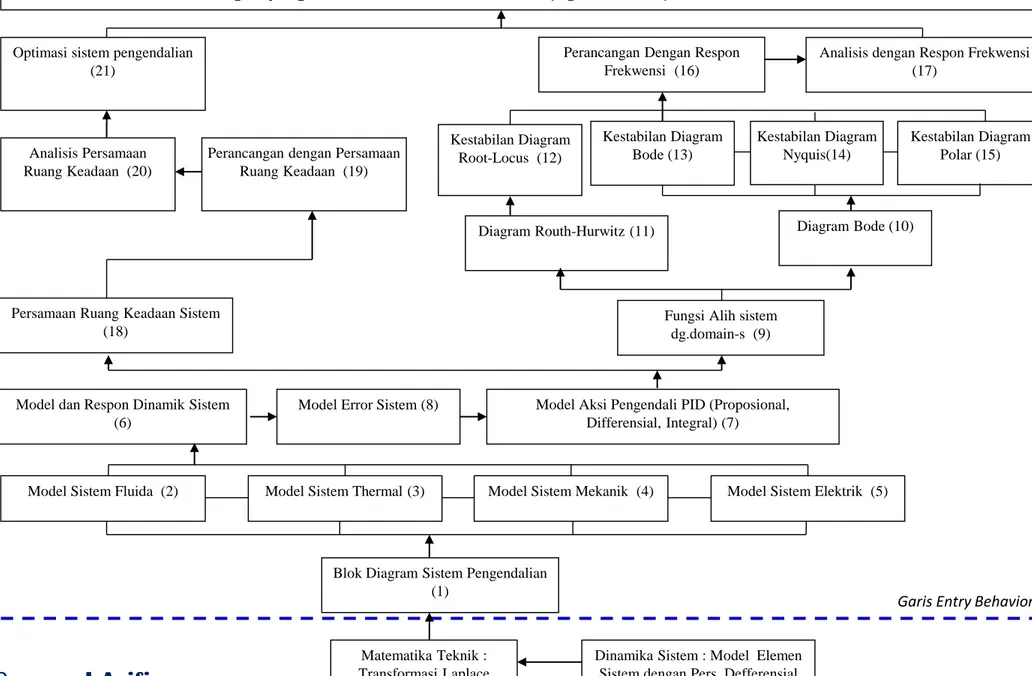
sistem pengendalian automatis dengan
logika yang benar baik secara mandiri atau juga dalam kerjasama tim.
Perancangan Dengan Respon Frekwensi (16)
Kestabilan Diagram Polar (15)
Diagram Bode (10)
Garis Entry Behavior
Perancangan dengan Persamaan Ruang Keadaan (19) Analisis Persamaan
Ruang Keadaan (20)
Analisis dengan Respon Frekwensi (17) Kestabilan Diagram Bode (13) Kestabilan Diagram Nyquis(14) Kestabilan Diagram Root-Locus (12) Diagram Routh-Hurwitz (11)
Fungsi Alih sistem dg.domain-s (9)
Model Aksi Pengendali PID (Proposional, Differensial, Integral) (7)
Model dan Respon Dinamik Sistem (6)
Model Error Sistem (8) Persamaan Ruang Keadaan Sistem
(18)
Model Sistem Fluida (2) Model Sistem Thermal (3) Model Sistem Mekanik (4) Model Sistem Elektrik (5)
Blok Diagram Sistem Pengendalian (1)
Matematika Teknik : Transformasi Laplace
Dinamika Sistem : Model Elemen Sistem dengan Pers. Defferensial Optimasi sistem pengendalian
content base
Syamsul Arifin
Tujuan Pembelajara :
Mahasiswa mampu
melakukan
perancangan dan
menganalisis
sistem pengendalian automatis dengan
logika yang benar baik secara mandiri atau juga dalam kerjasama tim.
P4:Melakukan Perancangan
Dengan Respon Frekwensi (16)
P3,C3:Menggunakan
Kestabilan Diagram Polar (15)
P3,C3: Membuat
Diagram Bode (10)
Garis Entry Behavior
P4 : Melakukan Perancangan
dengan Persamaan Ruang Keadaan (19) A3,C4 : Menganalisis
Dengan Persamaan Ruang Keadaan (20)
A3,C4 : MenganalisisDengan Respon Frekwensi (17) P3,C3: Mengguna-kanKestabilan Diagram Bode (13) P3,C3: Mengguna-kanKestabilan Diagram Nyquis(14) P3,C3:Menggunakan Kestabilan Diagram Root-Locus (12) P3,C3: MembuatDiagram Routh-Hurwitz (11) P2,C3:MerumuskanFungsi Alih sistem dg.domain-s (9)
A3,P2,C3:MengembangkanModel Aksi Pengendali PID (Proposional, Differensial, Integral) (7) P2,C3 : MengembangkanModel
dan Respon Dinamik Sistem (6)
P2,C3 : Merumuskan
Model Error Sistem (8) P2,C3 : MerumuskanPersamaan
Ruang Keadaan Sistem (18)
A2,C2 : MenjelaskanModel Sistem Fluida (2)
A2,C2 : Menjelaskan
Model Sistem Thermal (3)
A2,C2 : Menjelaskan
Model Sistem Mekanik (4)
A2,C2 : Menjelaskan
Model Sistem Elektrik (5)
C2 : PenyederhanaanBlok Diagram Sistem Pengendalian (1)
Matematika Teknik : Transformasi Laplace
Dinamika Sistem : Model Elemen Sistem dengan Pers. Defferensial A3,C4,P4 : Melakukan
PerancanganOptimasi sistem pengendalian (21)
Kemampuan awal yang diperlukan sebelum mengikuti matakuliah Sistem
Pengendalian Otomatis.
[K-1]: Mahasiswa mampu menjelaskan
(C2)
dengan benar model sistem pengendalian
beserta bagian-bagiannya,
[K-2]:Mahasiswa mampu merumuskan
(C3)
dengan teliti Respon dinamik, Pengendalian PID
dan Error sistem pengendalian otomatik,
[K-4]:Mahasiswa mampu
menganalisis
(C4)
&
melakukan perancangan
(P4)
sistem pengendalian
otomatik menggunakan
persaman ruang keadaan
(state space),sampai pada
optimasi sistem, secara
kreatif dalam kerjasama
tim,
[K-3]:Mahasiswa
mampu menganalisis
(C4)
& melakukan
perancangan
(P4)
sistem pengendalian
otomatik menggunakan
domain-s, secara
kreatif dalam
kerjasama tim,
Tujuan Pembelajaran : Mahasiswa Mampu
Menganalisis
Sistem Pengendalian Automatik.
Garis entry
behavior
Competency base
BAHAN
AJAR
dalam
bentuk
BUKU
AJAR,
DIKTAT,
MODUL
AJAR, dll.
Kuliah
Tutorial
DISKUSI, PBL,
CTL,dll.
&
Assessment
(TUGAS,
PRESENTASI,
Quis, Ujian, dll)
Syamsul Arifin
Tujuan Pembelajara : Mahasiswa mampu
menganalisis
sistem pengendalian automatis dengan logika yang benar baik secara
mandiri atau juga dalam kerjasama tim.
P4:Melakukan Perancangan
Dengan Respon Frekwensi (16)
P3,C3:Menggunakan
Kestabilan Diagram Polar (15)
P3,C3: Membuat
Diagram Bode (10)
Garis Entry Behavior
P4 : Melakukan Perancangan
dengan Persamaan Ruang Keadaan (19) A3,C4 : Menganalisis
Dengan Persamaan Ruang Keadaan (20)
A3,C4 : MenganalisisDengan Respon Frekwensi (17) P3,C3: Mengguna-kanKestabilan Diagram Bode (13) P3,C3: Mengguna-kanKestabilan Diagram Nyquis(14) P3,C3:Menggunakan Kestabilan Diagram Root-Locus (12) P3,C3: MembuatDiagram Routh-Hurwitz (11) P2,C3:MerumuskanFungsi Alih sistem dg.domain-s (9)
A3,P2,C3:MengembangkanModel Aksi Pengendali PID (Proposional, Differensial, Integral) (7) P2,C3 : MengembangkanModel
dan Respon Dinamik Sistem (6)
P2,C3 : Merumuskan
Model Error Sistem (8) P2,C3 : MerumuskanPersamaan
Ruang Keadaan Sistem (18)
A2,C2 : MenjelaskanModel Sistem Fluida (2)
A2,C2 : Menjelaskan
Model Sistem Thermal (3)
A2,C2 : Menjelaskan
Model Sistem Mekanik (4)
A2,C2 : Menjelaskan
Model Sistem Elektrik (5)
C2 : PenyederhanaanBlok Diagram Sistem Pengendalian (1)
Matematika Teknik : Transformasi Laplace
Dinamika Sistem : Model Elemen Sistem dengan Pers. Defferensial A3,C4,P4 : Melakukan
PerancanganOptimasi sistem pengendalian (21)
Entry behavior
[K-1]
[K-2]
[K-3]
[K-4]
Competency base
Contoh Analisis Pembelajaran
Asuhan Kebidanan I (Kehamilan)
garis entry behaviour
Menjelaskan
diagnosa kehamilan (C2)
Melaksanakan
deteksi dini terhadap
komplikasi ibu dan janin (C3,P3)
Membuat
dokumentasi asuhan kebidanan
pada ibu hamil (C3,P3)
TIU
Mampu
melaksanakan asuhan kebidanan pada ibu hamil normal
dengan pendekatan manajemen kebidanan beretika (C3,P4,A3)
Menjelaskan
faktor-faktor yang
mempengaruhi kehamilan (C2)
Menjelaskan
Kebutuhan dasar ibu hamil sesuai
dengan tahap perkembangannya (C2)
Melakukan
asuhan kehamilan (C3,P3)
Menjelaskan
proses adaptasi fisiologi &
psikologi dalam masa kehamilan (C2)
Menjelaskan
konsep dasar asuhan
kehamilan (C2)
Mampu
Melaksanakan
dg benar&
(C3+P3+A3)
Mampu
Menjelaskan
( C2)
Membuat,
Melaksanakan
dengan
benar(C2+P3)
HIRARKHIKAL
PROSEDURAL
PENGELOMPOKAN
KOMBINASI
Susunan beberapa
kompetensi
di mana satu/beberapa
kompetensi menjadi
prasyarat bagi kompetensi
berikutnya
STRUKTUR HIRARKHIKAL
Menjelaskan
Angka
Menggunakan
Operasi Aljabar
(+ , - , / , x)
Menggunakan
Operasi Integral
Keyword :
Verikal, bersyarat
Kemampuan belajar
mahasiswa tetap atau meningkat
Mengukur panjang benda
Mengukur Luas Benda
Mengukur volume benda
Kedudukan beberapa kompetensi
yang menunjukkan satu rangkaian pelaksanaan
kegiatan/pekerjaan, tetapi
antar kompetensi tersebut tidak
menjadi prasyarat untuk
kompetensi lainnya
Trampil
Mengendarai
Sepeda
Trampil
Mengendarai
Motor
Trampil
Mengendarai
Mobil
STRUKTUR PROSEDURAL
Keyword :
Horizontal, tidak bersyarat
Urutan kemampuan belajar tetap atau
meningkat dari mudah ke lebih sulit.
Beberapa
kemampuan yang
satu dengan lainnya tidak
memiliki ketergantungan,
tetapi harus dimiliki
secara lengkap untuk
menunjang kemampuan
berikutnya
PENGELOMPOKAN (CLUSTER)
Keyword :
Berkelompok, tidak bersyarat
Kemampuan belajar setingkat,
tingkat kesulitan belajar setara.
(Urutan belajar bebas)
Trampil
Mengemudi
Mobil
Menjelaskan
Rambu &
Marka Jalan
Menjelaskan
UU
Lalu-Lintas
Menjelaskan
topologi Star
topologi Ring
Menjelaskan
Menjelaskan
topologi Bus
Menjelaskan
topologi jaringan
Komputer
CONTOH PENGELOMPOKAN
Mata kuliah : Jaringan Komputer