i
PERANCANGAN KAKI ROBOT BERKAKI ENAM
Ardiwira Putra Telaumbanua / 0827040
Jurusan Sistem Komputer, Fakultas Teknik, Universitas Kristen Maranatha
Jalan Prof. Drg. Suria Sumantri 65
Bandung 40164, Indonesia
ABSTRAK
Kepraktisan dan kemudahan merupakan salah satu hal yang sangat dibutuhkan oleh manusia dan tidak tertutup kemungkinan dalam teknologi robotika yang sangat berkembang pesat pada saat ini yang dapat membantu banyak orang. Seiring dengan perkembangan teknologi yang begitu pesat maka dibuat suatu alat berbasis mikrokontroler untuk marancang robot berkaki yang dapat memberi kemudahan dan kepraktisan bagi banyak orang yang menggunakannya
Robot yang digunakan memiliki ukuran panjang 16 x 7.5 cm yang dilengkapi dengan 6 kaki, kaki robot digerakkan oleh 2 motor servo. Motor servo tesebut dikendalikan oleh mikrokontroler ATMega16. Robot tesebut memiliki 5 buah tombol yaitu tombol untuk maju, mundur, belok kanan, belok kiri dan manuver.
ii
DESIGN SIX FEET LEGGED ROBOTS
Ardiwira Putra Telaumbanua / 0827040
Jurusan Sistem Komputer, Fakultas Teknik, Universitas Kristen Maranatha
Jalan Prof. Drg. Suria Sumantri 65
Bandung 40164, Indonesia
ABSTRACT
Practicality and simplicity are the one of the important things to fulfill the human needs and it is also possible in robotics technology that is rapidly growing recently that could help many people. Along with the technological development, people create a microcontroller-based tool for designing legged robots that can provide convenience and practicality for the people who use it.
The robot has length of 16 x 7.5 cm which is equipped with 6 feet, foot robot driven by two servo motors. Servo motor proficiency level is controlled by the microcontroller at mega 16. Robot proficiency level has 5 buttons, are the button to go forward, backward, turn right, turn left and maneuver.
iii
BAB I. PENDAHULUAN 1.1 Latar Belakang………... 1
1.2 Identifikasi Masalah………...1
1.3 Tujuan………..2
1.4 Pembatasan Masalah………...2
1.5 Sistematika Penulisan……….….2
BAB II. LANDASAN TEORI 2.1 Microcontroller…..……….... 4
2.1.1 Kegunaan Microcontroller……..………..5
2.1.2 Jenis-jenis Microcontroller….….………... 6
2.2 AVR ATmega 16...….………....………... 7
2.2.1 Fitur- fitur ATmega16…...………8
iv
2.3 Motor Servo...………...13
2.4 Driver Motor L293D...………...16
2.5 CodeVisionAVR………...17
BAB III. PERANCANGAN DAN REALISASI 3.1 Perancangan Alat………...…...20
3.1.1 Perancangan Rangka Robot…………..……….... 20
3.1.2 Motor Servo………...24
3.1.3 Rangkaian Microcontroller...………...26
3.2 Cara Kerja Alat...34
3.3 Pembuatan Program...39
BAB IV. PEMBAHASAN DAN ANALISA 4.1 Pengujian Rangkaian Microcontroller…...………...42
4.2 Pengujian Robot..………... 43
4.3 Pengujian Rangka Robot.………... 47
BAB V. KESIMPULAN DAN SARAN 5.1 Kesimpulan……….... 48
5.2 Saran……….. 49
v LAMPIRAN A
Program pada CodeVisionAVR………. A-1
LAMPIRAN B
vi
DAFTAR TABEL
Tabel 2.1 Fungsi khusus port B……...…... 10
Tabel 2.2 Fungsi khusus port C..………... 11
Tabel 2.3 Fungsi khusus port D... 12
Tabel 4.1 Hasil percobaan robot maju pada bidang datar... 43
Tabel 4.2 Hasil percobaan robot mundur pada bidang datar... 44
Tabel 4.3 Hasil percobaan pada saat robot belok kanan... 44
Tabel 4.4 Hasil percobaan pada saat robot belok kiri... 45
Tabel 4.5 Hasil percobaan pada bidang miring (tanjakan)... 45
vii
Gambar 3.1 Blok Diagram...………...19
Gambar 3.2 Bagian atas rangka robot………... 20
Gambar 3.3 Bagian bawah rangka robot...………... 21
Gambar 3.4 Sambungan kaki dengan motor servo...………. 21
Gambar 3.5 Sambungan antara kaki depan dan kaki tengah...………... 22
Gambar 3.6 Spiser yang terbuat dari plastik...……….. 23
Gamba 3.7 Mur dan baut...……….. 23
Gambar 3.8 Motor Servo...………....25
Gambar 3.9 Rangkaian microcontroller...………...26
Gambar 3.10 microcontroller...………...28
Gambar 3.11 Port ATMega16...………. 30
Gambar 3.12 L293D...……….. 31
viii
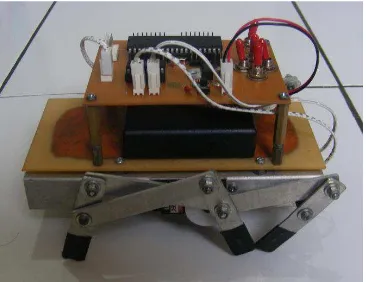
Gambar 3.14 Robot...………... 33
Gambar 3.15 Diagram alir utama...………... 34
Gambar 3.16 Diagram alir maju...35
Gambar 3.17 Diagram alir mundur... 36
Gambar 3.18 Diagram alir belok kanan... 37
Gambar 3.19 Diagram alir belok kiri...37
Gambar 3.20 Diagram alir manuver...38
Gambar 3.21 CodeVisionAVR... 39
Gambar 3.22 Konfigurasi ATMega16... 40
Gambar 3.23 Download Program... 41
Gambar 4.1 Lampu Led Nyala...………... 42
LAMPIRAN A
A-2
while (1) {
if(PINC.0 == 0) {
PORTB.0=1; // m1 jalan maju PORTB.1=0;
PORTB.2=1; // m2 jalan maju PORTB.3=0;
}
if(PINC.1 == 0) {
PORTB.0=0; // m1 jalan mundur PORTB.1=1;
PORTB.2=0; // m2 jalan mundur PORTB.3=1;
}
if(PINC.2 == 0) {
PORTB.0=1; // m1 jalan maju PORTB.1=0;
PORTB.2=1; // m2 jalan maju PORTB.3=0;
delay_ms(10000); // maju 10 detik PORTB.0=1; // m1 jalan maju PORTB.1=0;
PORTB.2=1; // m2 berhenti PORTB.3=1;
A-3
if(PINC.3 == 0) {
PORTB.0=1; // m1 jalan maju PORTB.1=0;
PORTB.2=1; // m2 jalan maju PORTB.3=0;
delay_ms(10000); // maju 10 detik PORTB.0=1; // m1 jalan maju PORTB.1=1;
PORTB.2=1; // m2 berhenti PORTB.3=0;
delay_ms(5000); // belok kiri 5 detik }
if(PINC.4 == 0) {
PORTB.0=1; // m1 jalan maju PORTB.1=0;
PORTB.2=1; // m2 jalan maju PORTB.3=0;
delay_ms(10000); // maju 10 detik PORTB.0=0; // m1 jalan mundur PORTB.1=1;
PORTB.2=0; // m2 jalan mundur PORTB.3=1;
delay_ms(10000); // mundur 10 detik PORTB.0=1; // m1 jalan maju PORTB.1=0;
PORTB.2=1; // m2 jalan maju PORTB.3=0;
A-4
PORTB.0=1; // m1 jalan maju PORTB.1=0;
PORTB.2=1; // m2 berhenti PORTB.3=1;
delay_ms(5000); // belok kanan 5 detik PORTB.0=1; // m1 jalan maju
PORTB.1=0;
PORTB.2=1; // m2 jalan maju PORTB.3=0;
delay_ms(5000); // maju 5 detik PORTB.0=1; // m1 jalan PORTB.1=1;
PORTB.2=1; // m2 berhenti PORTB.3=0;
delay_ms(5000); // belok kanan 5 detik }
A-5
LAMPIRAN B
A-6
A-7
A-8
1
BAB I
PENDAHULUAN
Bab ini membahas mengenai latar belakang, identifikasi masalah, tujuan,
pembatasan masalah, dan sistematika penulisan tugas akhir.
1.1 Latar Belakang
Seiring perkembangan teknologi yang semakin pesat, peran manusia
telah banyak digantikan dengan mesin ataupun robot dalam mengerjakan
suatu pekerjaan. Robot-robot yang dibuat memiliki berbagai bentuk seperti
robot beroda dan berkaki yang dikendalikan dengan suatu sistem kontrol.
Pengaplikasian robot-robot yang dirancang terdapat di industri - industri,
militer, medis, pendeteksi bahaya, penjelajahan bawah air, luar angkasa,
pertambangan, membantu aktivitas rumah tangga seperti penyedot debu,
pemotong rumput dan lain sebagainya. Maka dari itu dibuat dan dirancang
sebuah robot dengan menggunakan sistem kontrol.
1.2 Identifikasi Masalah
2
1.3 Tujuan
Merancangan kaki robot berkaki enam.
1.4 Pembatasan Masalah
1. Menggunakan microcontroller ATMega16
2. Menggunakan software AVR studio4
3. Robot digunakan pada bidang datar
4. Menggunakan motor servo sebagai penggerak kaki robot
5. Menggunakan Akrilik untuk badan dan kaki robot
6. Hanya ada satu saklar yang aktif / on saat menjalankan robot
1.5 Sistematika Penulisan
Sistematika penulisan laporan tugas akhir ini disusun dalam lima bab,
yaitu sebagai berikut:
1. Bab I : Pendahuluan
Bab ini membahas tentang latar belakang, identifikasi masalah,
tujuan, pembatasan masalah, dan sistematika penulisan.
2. Bab II : Landasan Teori
Bab ini membahas tentang dasar-dasar teori penunjang
3 3. Bab III : Perancangan dan Realisasi
Bab ini membahas tentang Perancangan kaki robot berkaki
enam.
4. Bab IV : Data Pengamatan dan Analisa
Bab ini membahas pengamatan, pengujian, dan analisa data
dari perangkat keras dan perangkat lunak yang telah dirancang
5. Bab V : Kesimpulan dan Saran
Bab ini merupakan bab penutup yang memuat tentang
48 BAB V
KESIMPULAN DAN SARAN
Bab ini merupakan bab penutup yang membahas tentang kesimpulan dan
saran – saran untuk perbaikan dan pengembangan lebih lanjut.
5.1 Kesimpulan
Berdasarkan hasil pengujian alat yang dirancang dan dibuat pada
tugas akhir ini maka dapat diambil kesimpulan bahwa :
1. Perancangan kaki robot menggunakan atmega16 berhasil direalisasikan
dan robot bisa berjalan sesuai dengan program
2. Kecepatan rata – rata maju adalah 0.045 meter/detik dan kecepatan rata –
rata mundur adalah 0.043 meter/detik
3. Waktu rata – rata yang dibutuhkan untuk belok kanan adalah 4.90 detik
dan waktu rata – rata yang dibutuhkan untuk belok kiri adalah 4.87 detik
4. Robot mampu maksimal menanjak sampai 25 derajat dan mampu
49 5.2 Saran
Setelah merancang, membuat dan mengevaluasikan kaki robot pada
tugas akhir ini maka penulis berharap tugas akhir ini dapat dikembangkan
lebih lanjut lagi dengan beberapa saran sebagai berikut:
1. Robot yang dibuat bisa dikembangkan dengan menambahkan sensor
seperti sensor ulrtasonik untuk mendeteksi benda, sensor tekanan dan
sebagainya.
50
DAFTAR PUSTAKA
Budioko, T. Belajar dengan mudah dan cepat pemrograman bahasa c dengan sddc pada mikrokontroler AT89x051/AT89c51/52. Jogjakarta : Gava media. 2005
Kerningan & Ritchie. The C Programing Language. USA : Prentice Hall. 1988
Winoto, Ardi. Mikrokontroler AVR ATmega8/32/16/8538 dan pemrogramannya dengan Bahasa C pada WinAVR. Bandung: Informatika. 2008.
Winoto, Ardi. Belajar mikrokontroler Attiny2313 step by step. Jogjakarta : Gava media. 2006.
http://atmel .com, 4 Mei 2011
http://id.wikipedia.org/wiki/Motor_servo, 6 April 2011
http//servocity.com