180
PEMROGRAMAN PLC PADA SISTEM PENGENDALIAN DAN PEMANTAUAN KECEPATAN MOTOR
Murie Dwiyaniti1, Syupriadi Nasution 2 Muhammad Faridl Daffa3,Tondi Mahendra4, Wahyu Primaandika5
1,2,3,4,5Politeknik Negeri Jakarta, Jurusan Teknik Elektro, Prodi Teknik Listrik, Jl. Prof. Dr. GA Siwabessy, Kampus Baru UI Depok 16425
e-mail: [email protected]1
ABSTRAK
Pengendalian dan juga pemantauan kecepatan motor induksi AC 3 fasa secara konvensional dan automatis pada Sistem Pengendalian Dan Pemantauan Kecepatan Motor terdiri dari beberapa komponen - komponen penting yaitu PLC (Programmable Logic Controller), inverter, dan SCADA. Pengaplikasian sistem ini juga bertujuan sebagai modul untuk uji kompetensi PLC dan SCADA di Politeknik Negeri Jakarta. Metode pelaksanaannya dengan cara mencari refrensi terkait kendali motor, membuat rancangan desain, pembelian alat dan bahan, perakitan alat, pengujian alat, dan pembuatan laporan. Untuk mempermudah perancangan dan pengaplikasian plant digunakan komponen-komponen yang bermerk sama yaitu produk Schneider Electric, dengan demikian komponen - komponen tersebut dapat berkomunikasi dengan mudah tanpa harus mengubahnya ke bahasa komunikasi internasional ladder diagram. Pengoperasian sistem dipantau menggunakan perangkat lunak Vijeo Citect sebagai software SCADA. Melalui pemantaun tersebut diperoleh kendali soft starting, dan multi speed dengan 8 kecepatan arah putaran forward dan 4 kecepatan arah putaran reverse, selain itu juga didapat nilai kecepatan putar motor, dan slip motor induksi AC 3 fasa.
Kata Kunci: Inverter; PLC; SCADA
ABSTRACT
The Motor Speed Control And Monitoring System consists of several important components, such as PLC (Programmable Logic Controller), inverter, and SCADA. The application of this system is also intended as a module for PLC and SCADA competency testing at the Jakarta State Polytechnic. The method of implementation is by looking for references related to motor control, making designs, purchasing tools and materials, assembling tools, testing tools, and making reports. The speed of the motor is done by the Inverter component with the frequency adjustment method entered on the motor.
The operation of system is monitored using Vijeo Citect as SCADA software. To simplify the design and application of plants used the same branded components, Schneider Electric products. so components can communicate easily without have to change it to the language of international communication ladder diagrams. The Motor Speed Control and Monitoring System, soft starting control and multi speed control are obtained with 8 forward rotation speeds and 4 reverse rotation speeds, while the motor rotational speed and induction motor slip are also obtained.
Keywords: Inverter; PLC; SCADA
181
PENDAHULUAN
Jurusan Teknik Elektro di Politeknik Negeri Jakarta khususnya program studi Teknik Listrik dan Teknik Otomasi Listrik Industri saat ini memerlukan peralatan Sistem Pengendalian Dan Pemantauan Kecepatan Motor. Peralatan ini digunakan sebagai sarana praktik dan uji kompetensi bidang otomasi industri berbasis pemrograman terkontrol.
Komponen – komponen pada peralatan ini merupakan komponen yang biasa digunakan dan mengacu pada standar industri, seperti PLC (Programable Logic Control), Inverter, SCADA, Kontaktor, dan Timer.
Tujuan penulisan ini adalah menjelaskan
bagaimana deskripsi alat dan cara kerja masing-masing aplikasi sesuai dengan deskripsi.
METODE PENELITIAN
Sistem Pengendalian Dan Pemantauan Kecepatan Motor seperti pada gambar 1 berbentuk modul yang dapat dimobilisasikan, berisi berbagai macam komponen – komponen yang berguna untuk mengoperasikan, mengendalikan, dan memantau kerja dari motor listrik. Sehingga dapat digunakan oleh mahasiswa/i Politeknik Negeri Jakarta, jurusan Teknik Elektro khususnya program studi Teknik Listrik dan Teknik Otomasi Listrik Industri sebagai modul untuk praktik dan uji kompetensi bidang otomasi.
Gambar 1. Sistem Pengendalian Dan Pemantau Kecepatan Motor
Deskripsi Alat
Pada Sistem Pengendalian Dan Pemantauan Kecepatan Motor terdapat PLC (Programmable Logic Controller), Kontaktor, Timer (Time Delay On), Inverter, SCADA, tombol tekan (push button), dan lampu tanda yang menjadi sebuah sistem untuk mengendalikan dan memantau motor induksi 3 fasa AC seperti pada gambar 3.3 dibawah.
Output dari sistem ini menggunakan Motor Induksi 3 fasa AC 0,37kW. Tata letak komponen pada sistem ini seperti pada gambar 3.1 adalah gawai proteksi yang terletak dibagian atas kanan terdiri dari tiga buah MCB satu fasa dan satu buah MCB tiga fasa.
Dibagian kiri atas terdapat lampu tanda dan tombol tekan (push button) untuk input dan indikator mode konvensional yang terdiri dari tiga tombol tekan, satu tombol Emergency, dan empat lampu tanda. Dibagian bawah kanan terdapat sebuah PLC (Programmable Logic Controller), dan Inverter dan dibagian bawah kiri terdapat tiga buah Kontaktor dan sebuah Timer.
DESKRIPSI KERJA
Sistem pengendalian dan pemantauan kecepatan motor ini terdiri dari dua buah mode, yakni mode Konvensional dan Automatis sebagai berikut:
a. Mode Konvensional
Pada mode konvensional menggunakan PLC, timer (on delay timer), dan tiga buah kontaktor untuk pengasutan star-delta.
Input perintah diberikan oleh tombol tekan (push button) kepada PLC untuk diproses.
PLC sebagai sequence controller diprogram untuk memproses perintah yang diberikan melalui tombol tekan (push button). Output dari PLC adalah kontaktor, dan timer yang berperan sebagai saklar elektromagnetik.
Flowchart mode konvensional terlihat pada gambar 2 dibawah. Selain itu dapat dimonitoring dan dihentikan juga mode konvensional ini melalui SCADA.
182
Gambar 2. Flow Chart Mode Konvensional Pengasutan Y - ∆
b. Mode Automatis
Pada mode automatis PLC, Inverter dan SCADA digunakan untuk memantau, dan mengendalikan motor induksi 3 fasa AC.
Pemberian perintah dan monitoring dilakukan melalui SCADA, tombol tekan digital SCADA memberi perintah kepada PLC untuk diproses. PLC sebagai sequence controller diprogram untuk memproses perintah yang diberikan.
Output dari PLC adalah inverter sebagai alat pengatur kecepatan motor induksi 3 fasa AC melalui pengaturan nilai frekuensi yang dikeluarkan, selain itu jika inverter diprogram dapat memperoleh motor soft starting. Jika sistem sudah berjalan maka besarnya nilai kecepatan putar motor (Nr), slip, dan informasi lainnya dapat dimonitoring melalui SCADA. Dalam mode automatis, aplikasi pengendaliannya terbagi menjadi motor soft starting dan multi speed, sehingga membuat cara kerja pada mode ini berbeda. Aplikasi soft starting dan multi speed adalah sebagai berikut:
1. Soft Starting
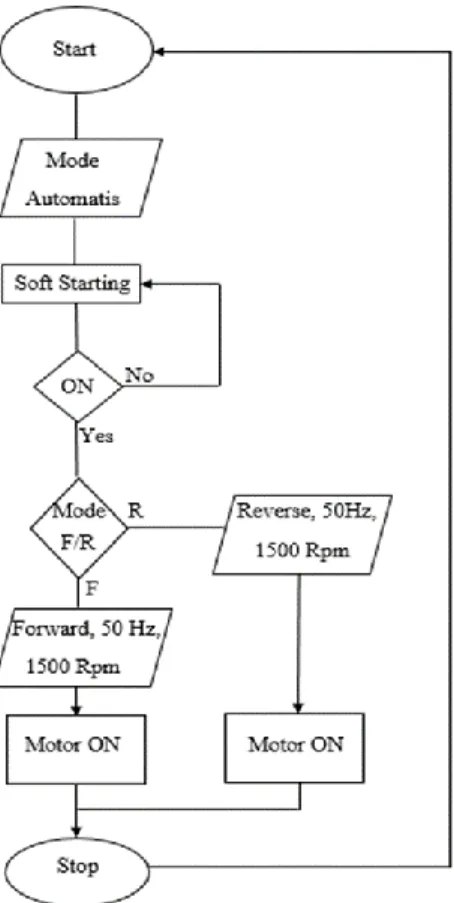
Aplikasi soft strating adalah aplikasi yang terdapat dalam mode automatis. Pada aplikasi ini inverter diatur nilai parameter ACC (Acceleration) dan DEC (Decceleration) sehingga memperoleh motor soft starting. Jika inverter telah diatur parameternya maka saat motor ON sampai frekuensi 50 Hz dan kecepatan maksimum akan terdapat interval waktunya, hal ini juga berlaku pada saat motor OFF. Dalam aplikasi soft starting ini arah putaran motor dapat dipilih untuk forward atau reverse. Flowchart untuk aplikasi soft starting dapat dilihat pada gambar 3 dibawah.
Gambar 3. Flow Chart Flow Chart Mode Automatis Soft Starting
2. Multi Speed
Aplikasi multi speed adalah aplikasi yang terdapat dalam mode automatis.
Pada aplikasi ini inverter diatur parameter PS (Preset Speed). Jika inverter telah diatur parameter preset speednya maka dapat diaktifkan parameter SP1 – SP8
183
untuk mengatur kecepatan putar motor sampai dengan 8 speed. Parameter SP1 – SP8 merupakan parameter yang diatur untuk mengeluarkan frekuensi yang berbeda – beda dengan batas maksimum nilai nominal frekuensi motornya yaitu 50 Hz. Untuk aplikasi ini terdapat dua variasi kendali, yakni automatis dan manual.
Kendali automatis perubahan peningkatan kecepatan putar motornya terjadi secara automatis dengan selang waktu 5 detik disetiap kecepatannya dan dapat berhenti pada kecepatan yang diinginkan. Lain halnya dengan kendali manual, variasi kecepatannya dapat dipilih bebas sesuai yang diinginkan. Dalam aplikasi multi speed ini arah putaran motor dapat dipilih untuk forward atau reverse. Untuk arah putaran forward terdapat 8 variasi kecepatan, sedangkan untuk reverse hanya terdapat 4 variasi kecepatan hal ini berlaku untuk kendali manual maupun automatis.
Flowchart untuk aplikasi multi speed dapat dilihat pada gambar 4 – 10 dibawah.
Gambar 4. Flow Chart Mode Automatis Manual Multi Speed
Gambar 5. Flow Chart Mode Manual Multi Speed
Gambar 6. Flow Chart Mode Manual Multi Speed (2)
184
Gambar 7. Flow Chart Mode Manual Multi Speed (3)
Gambar 8. Flow Chart Mode Auto Multi Speed (3)
Gambar 9. Flow Chart Mode Auto Multi Speed (4)
Gambar 10. Flow Chart Mode Auto Multi Speed (5)
185
DIAGRAM BLOK
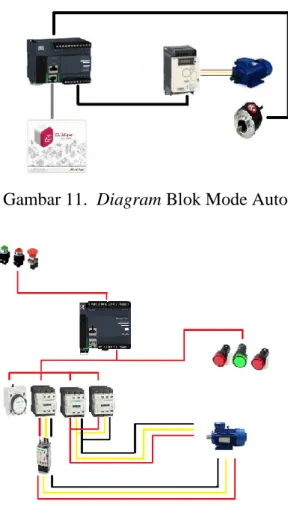
Gambar 11. Diagram Blok Mode Automatis
Gambar 12. Diagram Blok Mode Konvensional
Diagram blok diatas gambar 11.
merupakan struktur sistem yang mendeskripsikan cara kerja dari mode automatis Sistem Pengendalian Dan Pemantauan Kecepatan Motor. Dari diagram blok dapat terlihat dimana pusat kendali terdapat pada PLC, PLC memproses masukan yang berasal dari input yang berupa SCADA, input yang berada pada SCADA dikirimkan melalui media kabel Ethernet. Selain itu pada gambar 12. menunjukkan struktur sistem dari mode konvensional Sistem Pengendalian Dan Pemantauan Kecepatan Motor. Berdasarkan diagram blok tersebut dapat terlihat sama halnya dengan mode automatis, pusat kendali juga terdapat pada PLC, PLC memproses masukan yang berasal dari input yang berupa tombol tekan. Setelah PLC melakukan proses
kendali didalamnya berdasarkan masukan yang diterima dari input yang ada pada tombol tekan, maka PLC akan memberikan sinyal keluaran melalui terminal digital output. Pada terminal digital output, PLC akan mengirimkan sinyal ke terminal – terminal coil pada kontaktor selanjutnya kontaktor akan mengaktifkan kontak utamanya untuk menghubungkan kabel daya ke motor induksi 3 fasa lalu motor akan berputar.
HASIL DAN PEMBAHASAN a. Pengujian
Pengujian alat dilakukan dengan cara mendownload program PLC yang telah dibuat dan melihat proses yang terjadi pada sistem.
Tujuan dari pengujian ini yaitu untuk mengetahui apakah alat yang dibuat berjalan normal sesuai deskripsi kerja yang telah dirancang.
b. Prosedur Pengujian
Pengujian yang dilakukan sudah semestinya sesuai dengan prosedur pengujiannya agar dapat meminimalisir kesalahan yang mungkin terjadi. Hasil dari pengujian yang dilakukan dibuat dan dicatat dalam tabel analisis. Berikut prosedur pengujiannya:
1. Jalankan sistem atau alat sesuai dengan prosedur.
2. Gunakan SCADA untuk memilih mode konvensional atau automatis.
3. Gunakan push button atau SCADA untuk mengeksekusi perintah pada masing- masing mode yang dipilih.
4. Lakukan pengujian Sistem Pengendalian Dan Pemantauan Kecepatan Motor dengan cara menekan tombol tekan (push button) dan sakelar digital yang terdapat pada SCADA, apakah semuanya terintegrasi atau tidak dan apakah bekerja sesuai dengan deskripsi kerja yang dibuat.
5. Perhatikan kondisi input, output, dan proses kerja program pada simulator software SoMachine Basic.
186
6. Lakukan pencatatan dari kondisi input, output, dan proses kerja program pada simulator software SoMachine Basic.
7. Berikutnya, perhatikan keadaan I/O duplikasi pada monitoring software Somachine Basic dan frekuensi pada display monitoring Inverter.
8. Lakukan pengamatan secara aktual menggunakan tachometer untuk kecepatan putar motor, dan amati frekuensi pada layar monitor inverter.
9. Lakukan pencatatan proses kerja I/O dan pengukuran kecepatan motor untuk setiap mode softstarting atau multispeed.
c. Data Hasil Pengujian
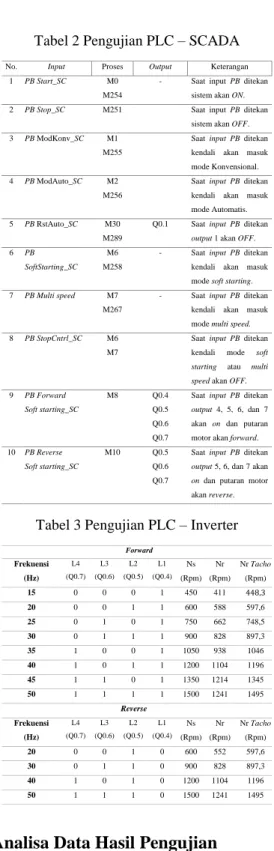
Pada tabel 1 ditampilkan data pengujian I/O PLC, tabel 2 data pengujian program dan koneksi PLC – SCADA, dan tabel 3 pengujian program dan koneksi PLC – Inverter.
Tabel 1 Pengujian I/O PLC
Tabel 2 Pengujian PLC – SCADA
Tabel 3 Pengujian PLC – Inverter
d. Analisa Data Hasil Pengujian
Dari hasil pengujian dapat diketahui program telah berjalan sesuai dengan deskripsi kerja. Tujuan dari masing – masing pengujian juga telah tercapai yaitu, memberikan input perintah dari tombol tekan dan juga SCADA, monitoring kerja sistem melalui SCADA, dan pengaturan kecepatan putar motor induksi AC 3 fasa melalui Inverter. Namun pada
No. Input Proses Output Keterangan
1 PB Start_Konv M3 K1T
Q0.3 Q0.2 Q0.0
Saat input PB ditekan output 2, dan 3 akan on dan 3 detik kemudian output 0 ON, dan 2 OFF lalu motor, akan berputar.
2 PB Stop_Konv M3 Q0.2
Q0.3
Saat input PB ditekan maka kendali mode Konvensional akan OFF, motor berhenti berputar.
3 PB Emergency M0 Saat input PB ditekan
sistem akan OFF.
4 NO_TOR M4
M289
Q0.1 Saat TOR konvenional mendeteksi gangguan maka output 1 akan ON (Buzzer Konvensional).
5 NC_TOR M3 Q0.2
Q0.3
Saat TOR konvenional mendeteksi gangguan
maka mode
Konvensional akan OFF, motor berhenti berputar (Output 2 dan 3 OFF).
6 Reset M4
M289
Q0.1 Saat input PB ditekan maka Buzzer akibat gangguan di mode Konvensional akan OFF.
7 TOR_Auto M30
M289
Q0.1 Saat TOR automatis (inverter) mendeteksi
No. Input Proses Output Keterangan
1 PB Start_SC M0
M254
- Saat input PB ditekan sistem akan ON.
2 PB Stop_SC M251 Saat input PB ditekan
sistem akan OFF.
3 PB ModKonv_SC M1 M255
Saat input PB ditekan kendali akan masuk mode Konvensional.
4 PB ModAuto_SC M2 M256
Saat input PB ditekan kendali akan masuk mode Automatis.
5 PB RstAuto_SC M30 M289
Q0.1 Saat input PB ditekan output 1 akan OFF.
6 PB SoftStarting_SC
M6 M258
- Saat input PB ditekan kendali akan masuk mode soft starting.
7 PB Multi speed M7 M267
- Saat input PB ditekan kendali akan masuk mode multi speed.
8 PB StopCntrl_SC M6 M7
Saat input PB ditekan kendali mode soft starting atau multi speed akan OFF.
9 PB Forward Soft starting_SC
M8 Q0.4
Q0.5 Q0.6 Q0.7
Saat input PB ditekan output 4, 5, 6, dan 7 akan on dan putaran motor akan forward.
10 PB Reverse Soft starting_SC
M10 Q0.5
Q0.6 Q0.7
Saat input PB ditekan output 5, 6, dan 7 akan on dan putaran motor akan reverse.
Forward Frekuensi
(Hz) L4 (Q0.7)
L3 (Q0.6)
L2 (Q0.5)
L1 (Q0.4)
Ns (Rpm)
Nr (Rpm)
Nr Tacho (Rpm)
15 0 0 0 1 450 411 448,3
20 0 0 1 1 600 588 597,6
25 0 1 0 1 750 662 748,5
30 0 1 1 1 900 828 897,3
35 1 0 0 1 1050 938 1046
40 1 0 1 1 1200 1104 1196
45 1 1 0 1 1350 1214 1345
50 1 1 1 1 1500 1241 1495
Reverse Frekuensi
(Hz) L4 (Q0.7)
L3 (Q0.6)
L2 (Q0.5)
L1 (Q0.4)
Ns (Rpm)
Nr (Rpm)
Nr Tacho (Rpm)
20 0 0 1 0 600 552 597,6
30 0 1 1 0 900 828 897,3
40 1 0 1 0 1200 1104 1196
50 1 1 1 0 1500 1241 1495
187
pengukuran kecepatan putar motor antara pengukuran aktual menggunakan tachometer dan tampilan SCADA memiliki nilai yang berbeda. Hal ini bisa disebabkan oleh berbagai hal seperti akurasi sensor, kesalahan pembacaan, dan kesalahan pengukuran.
KESIMPULAN
1. Sensor rotary encoder dapat diaplikasikan sebagai pengaman dan monitoring kecepatan motor induksi AC 3 fasa.
2. Pengaturan kecepatan motor induksi AC 3 fasa pada inverter Schneider ATV12H037M2 hanya bisa didapatkan 8 variasi kecepatan arah forward dan 4 variasi kecepatan arah reverse.
3. Untuk monitoring melalui SCADA harus membuat duplikasi I/O pada PLC dan menyamakan alamat IP PLC - SCADA.
4. Output digital PLC Schneider TM221CE24R adalah relay parameter tegangannya dapat berupa AC atau DC bergantung pada jenis tegangan yang diberikan pada Com PLC.
DAFTAR PUSTAKA
[1] Irons, Richard. 2014. SoMachine Basic Version 1.1 Training Manual.
[2] Schneider Electric. 2017. SoMachine Basic Operating Guide.
[3] Anonim. Basic PLC Programming.
http://program-plc.blogspot.com
[4] Pradana, Gilang. 2019. Pemrograman PLC Pada Modul Latih Sensor Analog Berbasis SCADA DAN IoT. Jakarta:
Politeknik Negeri Jakarta
[5] Farhan, Varel. 2019. Pemrograman PLC Pada Motor Control Center Berbasis Elektronik. Jakarta: Politeknik Negeri Jakarta
[6] Schneider Electric. 2020. Lembar Data Produk TM221CE24R.