TESIS
PENINGKATAN AKURASI PENENTUAN LOKASI PADA APLIKASI ANDROID MENGGUNAKAN ASSISTED GPS (A-GPS) DAN KALMAN
FILTER
IMPROVING THE ACCURACY OF LOCATION FETCHING IN ANDROID APPLICATION USING ASSISTED GPS (A-GPS) AND KALMAN
FILTER
Oleh:
DESKA RIZKA AMALIA 18/433770/PPA/05585
PROGRAM MAGISTER ILMU KOMPUTER
DEPARTEMEN ILMU KOMPUTER DAN ELEKTRONIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS GADJAH MADA 2020
TESIS
PENINGKATAN AKURASI PENENTUAN LOKASI PADA APLIKASI ANDROID MENGGUNAKAN ASSISTED GPS (A-GPS) DAN KALMAN
FILTER
IMPROVING THE ACCURACY OF LOCATION FETCHING IN ANDROID APPLICATION USING ASSISTED GPS (A-GPS) AND KALMAN
FILTER
Diajukan untuk memenuhi salah satu syarat memperoleh derajat Master of Computer Science
Oleh:
DESKA RIZKA AMALIA 18/433770/PPA/05585
PROGRAM MAGISTER ILMU KOMPUTER
DEPARTEMEN ILMU KOMPUTER DAN ELEKTRONIKA FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS GADJAH MADA 2020
HALAMAN PENGESAHAN
TESIS
PENINGKATAN AKURASI PENENTUAN LOKASI PADA APLIKASI ANDROID MENGGUNAKAN ASSISTED GPS (A-GPS) DAN KALMAN FILTER
Telah dipersiapkan dan disusun oleh DESKA RIZKA AMALIA
18/433770/PPA/05585
Telah dipertahankan didepan Dewan Penguji pada tanggal
3 Juni 2020
Susunan Dewan Penguji
Pembimbing Utama Ketua Dewan Penguji
Dr.techn. Ahmad Ashari, M.Kom. Dr. Nur Rokhman, S.Si., M.Kom.
NIP. 19630502 1990 03 1 005 NIP. 19710416 1997 02 1 001
Pembimbing Kedua Anggota
Dr. Sigit Priyanta, S.Si., M.Kom. Dr.-Ing. MHD. Reza M.I. P, S.Si., M.Sc.
NIP. 19770401 2002 12 1 002 NIP. 19751101 2002 12 1 002
Anggota
Dr. Tri Kuntoro Priyambodo, M. Sc.
NIP. 19591121 1988 03 1 001
Tesis ini telah diterima sebagai salah satu persyaratan untuk memperoleh gelar Master of Computer Science
Tanggal, 30 Juni 2020
Dr. Tri Kuntoro Priyambodo, M. Sc.
Pengelola Program Studi Monodisiplin S2 Ilmu Komputer
PERNYATAAN
Dengan ini saya menyatakan bahwa dalam tesis ini tidak terdapat karya yang pernah diajukan untuk memperoleh gelar kesarjanaan di suatu perguruan tinggi dan sepanjang pengetahuan saya juga tidak terdapat karya atau pendapat yang pernah ditulis atau diterbitkan oleh orang lain, kecuali yang secara tertulis diacu dalam naskah ini dan disebutkan dalam daftar pustaka.
Yogyakarta, 30 Juni 2020 Yang membuat pernyataan
Deska Rizka Amalia
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Allah SWT atas rahmat dan nikmat- Nya, sehingga penulis dapat menyelesaikan laporan tesis yang berjudul
“PENINGKATAN AKURASI PENENTUAN LOKASI PADA APLIKASI ANDROID MENGGUNAKAN ASSISTED GPS (A-GPS) DAN KALMAN FILTER” yang merupakan salah satu syarat untuk memperoleh gelar Master of Computer Science di Universitas Gadjah Mada.
Pada kesempatan ini penulis mengucapkan terimakasih kepada beerbagai pihak yang secara langsung maupun tidak langsung telah membantu penulis sehingga tesis ini dapat terselesaikan. Penulis mengucapkan terimakasih kepada : 1. Kedua malaikat yang Allah kirimkan untuk menjaga penulis di dunia ini,
Bapak Mukhtar dan Ibu Welas Saptowati atas kerja keras, pengorbanan, doa dan kasih sayangnya yang tak pernah berhenti.
2. Adikku, Amar Anas Ar-Rafli. You said that “Semua yang diawali dengan bismillah, tidak akan berhenti ditengah” that’s true, Bro. Make it work again.
3. Bapak Dr.techn. Ahmad Ashari, M. Kom. dan Bapak Dr. Sigit Priyanta, S.Si., M. Kom selaku pembimbing atas segala masukan, saran, dukungan serta motivasi yang diberikan kepada penulis untuk menyelesaikan tesis ini.
4. Bapak Dr. Nur Rokhman, S.Si., M.Kom. selaku ketua dewan penguji tesis, Bapak Dr.-Ing. MHD. Reza M.I. P, S.Si., M.Sc. dan Bapak Dr. Tri Kuntoro Priyambodo, M. Sc selaku anggota dewan penguji tesis yang memberikan kritik serta saran sehingga hasil akhir penelitian yang diperoleh menjadi lebih baik.
5. Bapak Dr. Tri Kuntoro Priyambodo, M. Sc. selaku Ketua Program Studi S2 Ilmu Komputer Universitas Gadjah Mada yang telah memberikan kesempatan kepada penulis untuk dapat belajar di jurusan Magister Ilmu Komputer UGM.
6. Bapak dan Ibu Dosen Program Studi S2 Ilmu Komputer Univeristas Gadjah Mada atas ilmu yang telah diberikan.
7. Sahabat-sahabatku, Misdiandini Fadilla Mukti, Rizki Dwi Kurniawan, dan M.
Ata Pradana, yang tak henti-hentinya memberikan semangat, selalu menghibur dan menjadi tempat penulis untuk kembali saat jauh menjelajah pergi.
8. Teman-teman Pra-S2 Kelas C 2018, Rina, Ranti, Eonni Febi, Mas Canggih, Ican, Uppi, Topang, dan Wulan yang menemani penulis sejak pertama kali menginjakkan kaki di UGM hingga akhirnya menyelesaikan tesis.
9. Teman-teman seperjuangan S2 Ilmu Komputer 2018 yang selama 2 tahun terakhir ini sudah berbagi senang, semangat, pengalaman dan ilmu bersama- sama.
10. Do Kyungsoo, Kim Jaehwan, Jeong Sewoon dan Kim Wooseok yang selalu menyadarkan penulis bahwa kerja keras tidak akan pernah mengkhianati.
11. Teman-teman WIN:D, yang selalu memberikan dukungan, semangat, dan kebahagiaan. Semoga lain waktu kita bisa bertemu kembali.
12. Semua pihak yang telah memberikan bantuan dan dukungan kepada penulis dalam penyusunan tesis ini yang tidak bisa disebutkan satu per satu.
Yogyakarta, 30 Juni 2020
Penulis
DAFTAR ISI
TESIS ...i
TESIS ... ii
HALAMAN PENGESAHAN ... iii
PERNYATAAN ...iv
KATA PENGANTAR ... v
DAFTAR ISI ... vii
DAFTAR GAMBAR ...ix
DAFTAR TABEL ... xii
INTISARI ...xiv
ABSTRACT ... xv
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Batasan Masalah ... 2
1.4 Tujuan Masalah ... 3
1.5 Manfaat Penelitian ... 3
1.6 Kontribusi Penelitian ... 3
BAB II KAJIAN PUSTAKA ... 4
BAB III LANDASAN TEORI ... 12
3.1 Global Positioning System (GPS) ... 12
3.2 Assisted-Global Positioning System (A-GPS) ... 13
3.3 GPS pada Smartphne ... 15
3.3.1 Application Programming Interface (API) pada Android ... 15
3.3.2 Fused Location Provider API ... 16
3.4 Konversi Lokasi ... 16
3.5 Kalman Filter ... 19
3.6 Haversine ... 24
3.7 Root Mean Square Error (RMSE) ... 25
BAB IV METODOLOGI PENELITIAN ... 26
4.1 Pengumpulan dan Analisis Data ... 27
4.2 Gambaran Umum Perancangan Aplikasi ... 28
4.3 Penerapan Fused Location Provider untuk Pengambilan Data Lokasi .... 29
4.4 Konversi Lokasi ... 30
4.5 Penerapan Kalman Filter ... 31
4.6 Penerapan Formula Haversine ... 33
4.7 Pengujian dan Evaluasi ... 34
BAB V IMPLEMENTASI ... 36
5.1 Lingkungan Implementasi ... 36
5.1.1 Alat ... 36
5.1.2 Aplikasi ... 36
5.3 Implementasi Fused Location Provider (FLP )API ... 36
5.4 Implementasi Konversi Lokasi ... 37
5.5 Implementasi Kalman Filter ... 41
5.6 Implementasi Formula Haversine ... 44
BAB VI HASIL DAN PEMBAHASAN ... 46
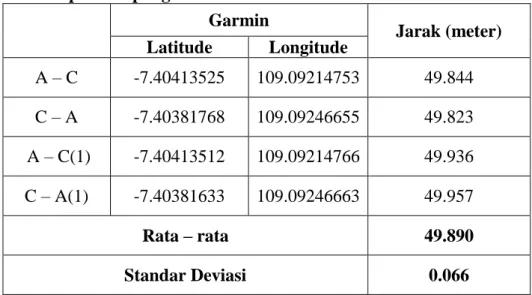
6.1 Hasil Pengambilan Koordinat pada Lapangan Luar Sekolah di Titik A ke Titik B ... 47
6.2 Hasil Pengambilan Koordinat pada Lapangan Luar Sekolah di Titik A ke Titik C ... 56
6.3 Hasil Pengambilan Koordinat pada Lapangan Luar Sekolah di Titik A ke Titik D ... 66
6.4 Hasil Pengambilan Koordinat pada Lapangan Luar Sekolah di Titik A ke Titik E ... 77
6.5 Hasil Perbandingan RMSE dari Seluruh Percobaan ... 87
6.6 Hasil Perbandingan Selisih Jarak dari Seluruh Percobaan ... 89
BAB VII SIMPULAN DAN SARAN ... 92
7.1 Simpulan ... 92
7.2 Saran ... 93
DAFTAR PUSTAKA ... 94
DAFTAR GAMBAR
Gambar 3. 1 Penentuan lokasi GPS dari beberapa satelit yang diterima
(www.plengduit.com) ... 12
Gambar 3. 2 Konsep A-GPS (Djuknic dan Richton, 2001) ... 143
Gambar 3. 3 Diagram proses Kalman Filter ... 20
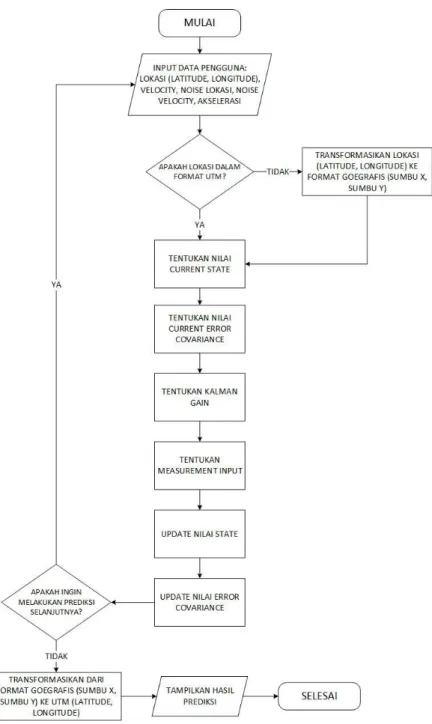
Gambar 4. 1 Flowchart Penelitian………. 26
Gambar 4. 2 Rancangan Aplikasi ... 284
Gambar 4. 3 Pengaksesan method dan parameter pada Fused Location Provider API ... 305
Gambar 5. 1 Kode Pengambilan Lokasi………... 37
Gambar 5. 2 Kode konversi error ... 38
Gambar 5. 3 Konversi dari satuan Geografis ke UTM ... 38
Gambar 5. 4 Konversi dari satuan UTM ke Geografis untuk Longitude ... 39
Gambar 5. 5 Konversi dari satuan UTM ke Geografis untuk Latitude ... 40
Gambar 5. 6 Konversi dari satuan UTM ke Geografis untuk Latitude (lanjutan) . 41 Gambar 5. 7 Konversi dari satuan UTM ke Geografis untuk Latitude (lanjutan) . 41 Gambar 5. 8 Menentukan predicted state ... 41
Gambar 5. 9 Menentukan process covariance matrix ... 443
Gambar 5. 10 Menentukan kalman gain ... 43
Gambar 5. 11 Menentukan new observation state ... 44
Gambar 5. 12 Menentukan current state ... 44
Gambar 5. 13 Menentukan update process covariance ... 45
Gambar 5. 14 Implementasi Formula Haversine ... 456
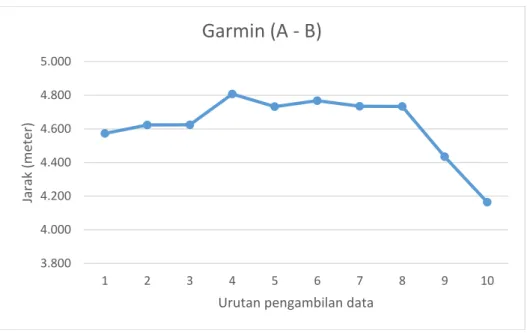
Gambar 6. 1. Grafik perubahan jarak antara titik A ke titik B saat diukur menggunakan perangkat Garmin ... 48
Gambar 6. 2. Grafik perubahan jarak antara titik A ke titik B saat diukur menggunakan perangkat Android Mode GPS tanpa Kalman Filter ... 49
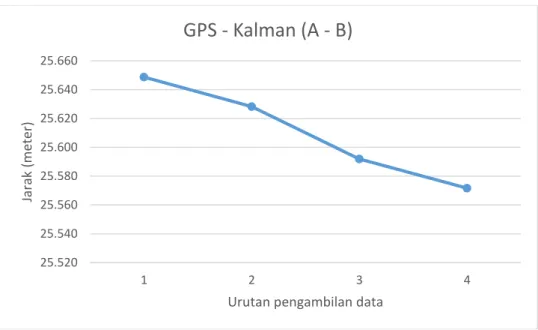
Gambar 6. 3. Grafik perubahan jarak antara titik A ke titik B saat diukur menggunakan perangkat Android Mode GPS dengan Kalman Filter ... 50
Gambar 6. 4. Grafik perubahan jarak antara titik A ke titik B saat diukur menggunakan perangkat Android Mode GPS dan WiFi/mobile network tanpa Kalman Filter ... 52
Gambar 6. 5. Grafik perubahan jarak antara titik A ke titik B saat diukur menggunakan perangkat Android Mode GPS dan WiFi/mobile network dengan Kalman Filter ... 52
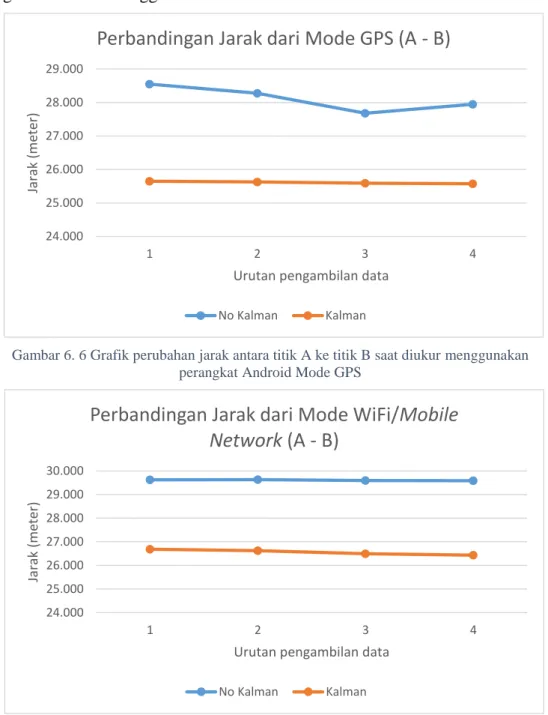
Gambar 6. 6 Grafik perubahan jarak antara titik A ke titik B saat diukur menggunakan perangkat Android Mode GPS ... 54
Gambar 6. 7. Grafik perubahan jarak antara titik A ke titik B saat diukur
menggunakan perangkat Android Mode GPS dan WiFi/mobile network .... 54 Gambar 6. 8. Grafik perubahan jarak antara titik A ke titik B saat diukur
menggunakan semua metode ... 56 Gambar 6. 9. Grafik perubahan jarak antara titik A ke titik C saat diukur
menggunakan perangkat Garmin ... 57 Gambar 6. 10. Grafik perubahan jarak antara titik A ke titik C saat diukur
menggunakan perangkat Android Mode GPS tanpa Kalman Filter ... 59 Gambar 6. 11. Grafik perubahan jarak antara titik A ke titik C saat diukur
menggunakan perangkat Android Mode GPS dengan Kalman Filter ... 59 Gambar 6. 12. Grafik perubahan jarak antara titik A ke titik C saat diukur
menggunakan perangkat Android Mode GPS dan WiFi/mobile network tanpa Kalman Filter ... 61 Gambar 6. 13. Grafik perubahan jarak antara titik A ke titik C saat diukur
menggunakan perangkat Android Mode GPS dan WiFi/mobile network dengan Kalman Filter ... 62 Gambar 6. 14. Grafik perubahan jarak antara titik A dan titik C saat diukur
menggunakan perangkat Android Mode GPS ... 64 Gambar 6. 15. Grafik perubahan jarak antara titik A dan titik C saat diukur
menggunakan perangkat Android Mode GPS dan WiFi/mobile network .... 64 Gambar 6. 16. Grafik perubahan jarak antara titik B ke titik C saat diukur
menggunakan semua metode ... 66 Gambar 6. 17. Grafik perubahan jarak antara titik A ke titik D saat diukur
menggunakan perangkat Garmin ... 67 Gambar 6. 18. Grafik perubahan jarak antara titik A ke titik D saat diukur
menggunakan perangkat Android Mode GPS tanpa Kalman Filter ... 69 Gambar 6. 19. Grafik perubahan jarak antara titik A ke titik D saat diukur
menggunakan perangkat Android Mode GPS dengan Kalman Filter ... 69 Gambar 6. 20. Grafik perubahan jarak antara titik A ke titik D saat diukur
menggunakan perangkat Android Mode GPS dan WiFi/mobile network tanpa Kalman Filter ... 71 Gambar 6. 21. Grafik perubahan jarak antara titik A ke titik D saat diukur
menggunakan perangkat Android Mode GPS dan WiFi/mobile network dengan Kalman Filter ... 72 Gambar 6. 22 Grafik perubahan jarak antara titik A ke titik D saat diukur
menggunakan perangkat Android Mode GPS ... 74 Gambar 6. 23. Grafik perubahan jarak antara titik A ke titik D saat diukur
menggunakan perangkat Android Mode GPS dan WiFi/mobile network .... 74 Gambar 6. 24. Grafik perubahan jarak antara titik A ke titik D saat diukur
menggunakan semua metode ... 76
Gambar 6. 25 Grafik perubahan jarak antara titik A ke titik E saat diukur
menggunakan perangkat Garmin ... 78 Gambar 6. 26. Grafik perubahan jarak antara titik A ke titik E saat diukur
menggunakan perangkat Android Mode GPS tanpa Kalman Filter ... 79 Gambar 6. 27. Grafik perubahan jarak antara titik A ke titik E saat diukur
menggunakan perangkat Android Mode GPS dengan Kalman Filter ... 80 Gambar 6. 28. Grafik perubahan jarak antara titik A ke titik E saat diukur
menggunakan perangkat Android Mode GPS dan WiFi/mobile network tanpa Kalman Filter ... 82 Gambar 6. 29. Grafik perubahan jarak antara titik A ke titik E saat diukur
menggunakan perangkat Android Mode GPS dan WiFi/mobile network dengan Kalman Filter ... 82 Gambar 6. 30 Grafik perubahan jarak antara titik A ke titik E saat diukur
menggunakan perangkat Android Mode GPS ... 84 Gambar 6. 31. Grafik perubahan jarak antara titik A ke titik E saat diukur
menggunakan perangkat Android Mode GPS dan WiFi/mobile network .... 85 Gambar 6. 32. Grafik perubahan jarak antara titik A ke titik E saat diukur
menggunakan semua metode ... 87
DAFTAR TABEL
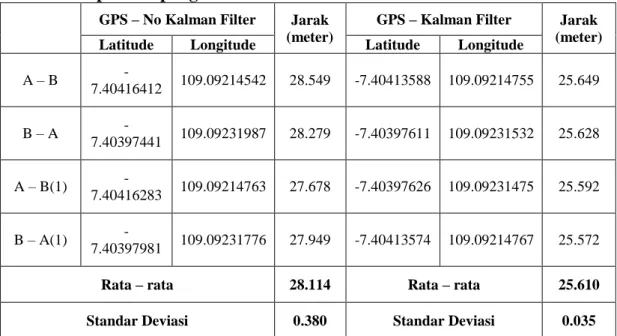
Tabel 2.1. Kajian Pustaka ... 8 Tabel 4.1. Daftar Fungsi dan Dekskripsi Fungsi ... 25 Tabel 4.2 Tahapan Pengambilan Lokasi Pengguna... 35 Tabel 6.1. Hasil Pengambilan Koordinat Menggunakan Perangkat Garmin pada Lapangan Luar Sekolah di Titik A ke Titik B ... 47 Tabel 6.2 Hasil Pengambilan Koordinat Menggunakan Perangkat Android mode GPS pada Lapangan Luar Sekolah di Titik A ke Titik B ... 49 Tabel 6.3 Hasil Pengambilan Koordinat Menggunakan Perangkat Android mode GPS dan WiFi/mobile network pada Lapangan Luar Sekolah di
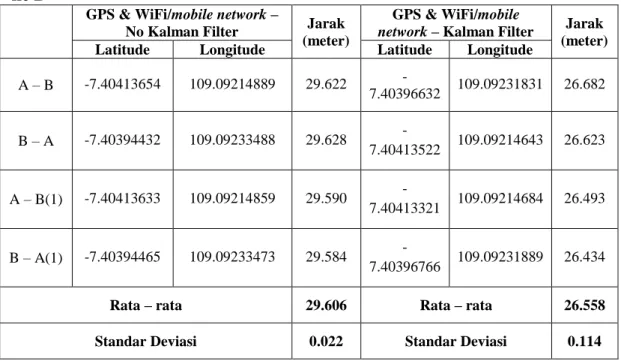
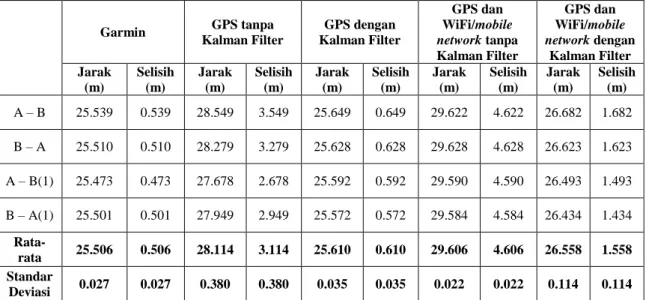
Titik A ke Titik B ... 51 Tabel 6.4. Jarak dan Selisih yang Dihasilkan oleh 5 Metode Pengambilan Data yang Berbeda di Titik A ke Titik B ... 55 Tabel 6.5 Hasil Pengambilan Koordinat Menggunakan Perangkat Garmin pada Lapangan Dalam Sekolah di Titik A ke Titik C ... 57 Tabel 6.6. Hasil Pengambilan Koordinat Menggunakan Perangkat Android mode GPS pada Lapangan Luar Sekolah di Titik A ke Titik C ... 58 Tabel 6.7. Hasil Pengambilan Koordinat Menggunakan Perangkat Android mode GPS dan WiFi/mobile network pada Lapangan Luar Sekolah di Titik A ke titik C ... 61 Tabel 6.8. Jarak dan Selisih yang Dihasilkan oleh 5 Metode Pengambilan Data yang Berbeda pada Titik A ke Titik C... 65 Tabel 6.9. Hasil Pengambilan Koordinat Menggunakan Perangkat Garmin pada Lapangan Luar Sekolah di Titik A ke Titik D ... 67 Tabel 6.10. Hasil Pengambilan Koordinat Menggunakan Perangkat Android mode GPS pada Lapangan Luar Sekolah di Titik A ke D ... 68 Tabel 6.11. Hasil Pengambilan Koordinat Menggunakan Perangkat Android mode GPS dan WiFi/mobile network pada Lapangan Luar Sekolah di Titik A ke Titik D ... 71 Tabel 6.12. Jarak dan Selisih yang Dihasilkan oleh 5 Metode Pengambilan Data yang Berbeda pada Titik A ke Titik D ... 75 Tabel 6.13. Hasil Pengambilan Koordinat Menggunakan Perangkat Garmin pada Lapangan Luar Sekolah di Titik A ke Titik E ... 77 Tabel 6.14. Hasil Pengambilan Koordinat Menggunakan Perangkat Android mode GPS pada Lapangan Luar Sekolah di Titik A ke Titik E ... 79 Tabel 6.15. Hasil Pengambilan Koordinat Menggunakan Perangkat Android mode GPS dan WiFi/mobile network pada Lapangan Luar Sekolah di Titik A ke Titik E ... 81
Tabel 6.16. Jarak dan Selisih yang Dihasilkan oleh 5 Metode Pengambilan Data yang Berbeda di Titik A ke titik Titik E ... 86 Tabel 6.17. Perbandingan Hasil RMSE dari Masing-masing Mode dan Metode ... 87 Tabel 6.17. Perbandingan Hasil RMSE dari Masing-masing Mode dan Metode ... 90
INTISARI
PENINGKATAN AKURASI PENENTUAN LOKASI PADA APLIKASI ANDROID MENGGUNAKAN ASSISTED GPS (A-GPS) DAN KALMAN
FILTER
Oleh
Deska Rizka Amalia 18/433770/PPA/05585
GPS pada perangkat Android saat ini banyak digunakan untuk menentukan lokasi pengguna dan sebagai petunjuk arah. Namun, akurasi GPS pada perangkat Android belum optimal sehingga peningkatan akurasi GPS perlu dilakukan. Pada penelitian ini, API Fused Location Provider pada A-GPS dan Kalman Filter digunakan untuk meningkatkan akurasi pengambilan lokasi pengguna menggunakan perangkat Android.
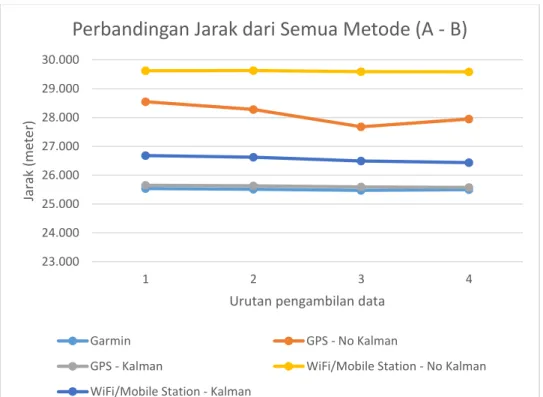
Pengujian pengambilan lokasi dilakukan dengan lima cara, menggunakan GPS Garmin sebagai acuan, menggunakan perangkat Android dengan mode GPS tanpa Kalman Filter, menggunakan perangkat Android dengan mode GPS dan Kalman Filter, menggunakan perangkat Android dengan mode GPS dan Wi- Fi/mobile network tanpa Kalman Filter dan menggunakan perangkat Android dengan mode GPS dan Wi-Fi/mobile network dengan Kalman Filter. Pengambilan lokasi pengguna menggunakan perangkat Android dan masing-masing pengujian tersebut akan menghasilkan selisih pergeseran lokasi pengguna dalam satuan meter.
Pada penelitian ini, dihasilkan selisih jarak terpendek oleh metode pengambilan lokasi pada perangkat Android menggunakan mode GPS dan Kalman Filter sebesar 1.137 meter. Hasil tersebut diketahui 9.812 meter lebih baik dari selisih yang dihasilkan dari penelitian sebelumnya yaitu sebesar 10.949 meter. A- GPS dan Kalman Filter juga mampu meningkatkan nilai RSME hingga 1.125 meter. Dan dapat diketahui bahwa mode GPS dan Kalman Filter merupakan mode terbaik yang dapat digunakan untuk melakukan pengambilan lokasi secara realtime dibandingkan dengan mode GPS tanpa Kalman Filter, mode GPS dan WiFi/mobile network tanpa Kalman Filter, dan mode GPS dan WiFi/mobile network dengan Kalman Filter.
Kata Kunci: GPS, Android, Kalman Filter, Fused Location Provider
ABSTRACT
IMPROVING THE ACCURACY OF LOCATION FETCHING IN ANDROID APPLICATION USING ASSISTED GPS (A-GPS) AND KALMAN FILTER
By
Deska Rizka Amalia 18/433770/PPA/05585
GPS on Android devices is currently widely used to determine the user's location and as a direction pointer. However, GPS accuracy on Android devices is not optimal so an increase in GPS accuracy needs to be done. In this study, the Fused Location Provider API on A-GPS and Kalman Filter is used to improve the accuracy of user location retrieval using an Android device.
Testing the location is done in five ways, using Garmin GPS as a reference, using an Android device with GPS mode without Kalman Filter, using an Android device with GPS and Kalman Filter mode, using an Android device with GPS and Wi-Fi / mobile network mode without Kalman Filter and using and last Android device with GPS and Wi-Fi / mobile network mode with Kalman Filter. Retrieval of the user's location using an Android device and each test will produce an error value and shift the user's location in meters.
In this study, athe shortest distance was generated by Android device using GPS mode and Kalman Filter is 1.137 meters. These results are known to be 9,812 meters better than the difference generated from previous studies which amounted to 10.949 meters. A-GPS and Kalman Filter also increase the value of RSME to 1.125 meters. And it can be seen that the GPS mode and Kalman Filter are the best modes that can be used to fetch locations in real time compared to GPS mode without Kalman Filter, GPS and WiFi / mobile network modes without Kalman Filter, and GPS and WiFi / mobile network modes with Kalman Filter.
Keywords: GPS, Android, Kalman Filter, Fused Location Provider
BAB I
PENDAHULUAN
1.1 Latar Belakang
Perkembangan teknologi di bidang mobile internet yang semakin cepat, mampu membuat smart phone menjadi salah satu perangkat yang selalu dibutuhkan oleh manusia. Terlebih smart phone saat ini muncul dengan sistem operasi yang bervariasi mulai dari iOS hingga Android. Didapatkan data dari Emarketer pada tahun 2018, pengguna smart phone mencapai lebih dari 100 juta orang (www.emarketer.com). Hal tersebut disebabkan oleh harga yang cukup terjangkau dan memiliki fitur yang mampu membantu dan mempermudah manusia seperti menentukan lokasi pengguna dan tempat yang ingin dikunjungi menggunakan Global Positioning System (GPS). Akan tetapi, penggunaan GPS pada perangkat Android memiliki akurasi yang belum optimal sehingga peningkatan akurasi penentuan lokasi pada perangkat Android sangat dibutuhkan.
Oklilas (2015) menyebutkan bahwa penggunaan GPS pada aplikasi Location Based Service (LBS) pada Android dengan pengambilan lokasi menggunakan metode LBS API memiliki nilai rata-rata pergeseran titik pembacaan dari posisi sebenarnya sebesar 10.949 meter dan masih diatas standar akurasi posisi absolut yang sudah ditentukan berdasarkan BSN (2002) dalam SNI 19-6724-2002 sebesar 8 hingga 10 meter.
Dengan kemajuan teknologi, ditemukan sebuah metode yang dapat membantu meningkatkan akurasi pembacaan GPS pada perangkat android. Salah satunya dengan cara penggunaan Assisted-GPS. Singhal dan Shukla (2012) menjelaskan bahwa A-GPS merupakan teknologi baru yang dimiliki oleh perangkat selular yang mengintegrasikan jaringan seluler dengan GPS untuk memberikan akurasi yang lebih baik dari 5 hingga 10 meter. Hal ini mampu memperbaiki posisi pengguna dalam hitungan detik dan memiliki cakupan yang lebih baik. Selain itu, A-GPS memungkinkan pengguna untuk mendapatkan informasi terkait lokasi pengguna menggunakan berbagai macam sumber jika sebuah data dari GPS tidak dapat
2 diakses yaitu dengan memanfaatkan Wi-Fi dan Network Provider. Pengambilan informasi lokasi pengguna menggunakan sumber lain tersebut bisa didapatkan dengan cara menggunakan Fused Location Provider (FLP) API. Disebutkan pada tahun 2018 FLP mampu mengambil data lokasi pengguna secara dinamis ke GPS dan Network Provider sehingga mampu mengurangi konsumsi baterai (developers.google.com).
Kalman Filter menjadi salah satu metode yang dapat melakukan estimasi sebuah nilai secara rekursif dan meminimalkan estimasi Mean-Squared Error pada sistem linear stokastik yang menerapkan Noisy Linear Sensors. Kalman Filter juga disebut sebagai LQE atau Linear Quadratic Estimator karena mampu berperan untuk meminumkan fungsi kuadratik dari error estimasi pada sistem dinamis linear dengan White Measurements dan Disturbance Noise (Grewal dan Andrews, 2001).
Welch dan Bishop (2006) menyebutkan bahwa Kalman filter memiliki kelebihan dalam melakukan estimasi titik lokasi pengguna pada masa lalu, sekarang hingga masa yang akan datang bahkan ketika precise nature dari sebuah model sistem tidak diketahui.
Pada penelitian ini akan diterapkan dua buah metode yang mampu meningkatkan penentuan lokasi pada perangkat Android dengan memanfaatkan A- GPS dan Kalman Filter.
1.2 Rumusan Masalah
Berdasarkan latar belakang di atas, rumusan masalah dalam penelitian ini adalah rendahnya akurasi penentuan lokasi pada aplikasi Android sehingga aplikasi tidak memberikan posisi pengguna yang tepat dan akurat.
1.3 Batasan Masalah
Batasan masalah yang digunakan dalam penelitian ini adalah sebagai berkut:
1. Penelitian ini berfokus pada penerapan metode yang mampu meningkatkan akurasi penentuan lokasi pada aplikasi Android.
2. Pengembangan aplikasi ini dibuat di platform Android.
3. Data lokasi yang digunakan sebagai sample dan pengujian adalah data lokasi lapangan luar SMA N 1 Ajibarang.
3 1.4 Tujuan Masalah
Tujuan yang akan dicapai adalah menerapkan A-GPS dan Kalman Filter pada aplikasi Android untuk meningkatkan akurasi penentuan lokasi
1.5 Manfaat Penelitian
Hasil penelitian ini dapat dimanfaatkan untuk membantu meningkatkan akurasi penentuan lokasi pada aplikasi Android dibantu dengan penerapan A-GPS dan Kalman Filter.
1.6 Kontribusi Penelitian
Penelitian ini memiliki kontribusi dalam pengembangan aplikasi Location Based Service berbasis Android dengan mengkombinasikan penggunaan A-GPS yang mampu melakukan pengambilan posisi pengguna di berbagai kondisi dan Kalman Filter sebagai algoritma yang mampu meningkatkan akurasi pengambilan lokasi penguna. Dimana, hingga saat ini belum ditemukan adanya penelitian yang menggabungkan dan menerapkan kedua metode tersebut
BAB II
KAJIAN PUSTAKA
Sunyoto (2009) menyatakan bahwa Location Based Service dapat dijadikan sebagai subset spesial dari context-aware system yang berperan sebagai layanan yang secara otomatis mampu menyesuaikan servis tersebut, contohnya, mampu menyaring dan menyajikan informasi untuk salah satu atau beberapa parameter yang mencerminkan dengan baik context dan target.
Location Based Service secara umum membutuhkan informasi dari pengguna berupa lokasi pengguna saat ini, baik dapat diakses secara real-time maupun tidak.
Untuk mengambil lokasi pengguna, dapat dilakukan dengan beberapa metode salah satunya Advanced Positioning. Pada Advanced Positioning digunakan teknologi Global Positioning System (GPS) yang saat ini dikembangkan menjadi A-GPS untuk digunakan di perangkat selular.
Peningkatan akurasi pengambilan lokasi juga dimungkinkan untuk dilakukan baik di dalam ruangan maupun diluar ruangan. Yang dan Aoshuang (2009) membuat desain pengambilan lokasi pengguna dengan nama Ubiquitous Locatting based on GPS and Wi-Fi (ULGW). Konsep ini memungkinkan posisi pengguna dapat diketahui ketika di luar ruangan dengan mengandalkan GPS Locater sedangkan untuk mendapatkan lokasi pengguna di dalam ruangan, dapat ditentukan dengan mencari lokasi data dari GPS atau dari Access Point (AP) terdekat. Namun pada penelitian ini penentuan lokasi pengguna dalam ruangan sangat bergantung dengan lokasi AP yang terkoneksi ke perangkat pengguna dan tidak memberikan posisi pengguna secara akurat. Selain itu, sangat terbatas jangkauan AP yang diberikan yaitu hanya sekitar 10 meter dari jangkauan pengguna.
Dilakukan penelitian oleh Xia dkk. (2011) dengan memanfaatkan teknologi A- GPS untuk melakukan pengambilan lokasi pengguna dalam jangkauan Wi-Fi. Pada penelitian ini dapat diketahui lokasi pengguna dengan cara menghitung jarak pengguna dengan Wi-Fi berdasarkan lama waktu yang dibutuhkan antara perangkat pengguna dengan Wi-Fi untuk melakukan pertukaran data. Namun pada penelitian ini terlalu difokuskan dalam hal penurunan konsumsi baterai perangkat bukan pada
5 akurasi lokasi yang diberikan. Selain itu, proses pertukaran data sangat bergantung dengan jarak perangkat dengan Wi-Fi yang terkoneksi.
Diggelen dkk. (2018) melakukan penelitian dan menyebutkan bahwa meningkatkan akurasi pengambilan lokasi pengguna menggunakan sarana Wi-Fi dapat dilakukan dengan cara menghitung Round-Trip Time yang dimiliki oleh setiap perangkat pengguna yang terkoneksi dengan Wi-Fi. Dihasilkan bahwa akurasi pengambilan lokasi pengguna mampu meningkat hingga kurang lebih 2 meter dari posisi yang sebenarnya
Singhal dan Shukla (2012) menyebutkan bahwa GPS menggunakan konstelasi 24 satelit yang mengelilingi bumi. GPS menemukan posisi pengguna dengan menghitung perbedaan waktu sinyal dari beberapa satelit yang berbeda untuk mencapai ke receiver. Assisted-GPS (A-GPS) adalah teknologi baru yang dimiliki oleh perangkat selular yang mengintegrasikan jaringan seluler dengan GPS untuk memberikan akurasi yang lebih baik dari 5 hingga 10 meter. Hal ini mampu memperbaiki posisi pengguna dalam hitungan detik dan memiliki cakupan yang lebih baik.
Dijelaskan oleh Gurram dan Giri (2016) bahwa aplikasi berbasis lokasi yang digunakan di perangkat selular secara umum akan melakukan pengambilan lokasi pengguna secara real-time dengan tiga cara : Pertama, GPS provider pada Android akan memanfaatkan satelit untuk menentukan lokasi pengguna saat ini.
Pengambilan lokasi dengan metode tersebut dinilai memiliki nilai akurasi tertinggi namun menguras baterai perangkat selular dengan sangat cepat karena penggunaan GPS provider membutuhkan daya baterai yang tinggi atau power suply yang berkelanjutan agar perangkat selular mampu melacak jalur pengguna untuk waktu yang lama.
Kedua, Network Provider menentukan lokasi perangkat selular saat ini melalui Cellular Network atau titik akses Wi-Fi. Namun, pada cara ini tingkat akurasi dinilai lebih rendah dari pada akurasi yang diberikan oleh GPS Provider. Ketiga, Location Provider yang merupakan Location Provider khusus yang mampu memungkin pengguna tidak perlu memulai pengambilan suatu lokasi jika lokasi
6 dapat ditentukan tanpa perlu aplikasi tersebut mencoba untuk melakukan trigger kepada provider.
Penelitian mengenai penggunaan Fused Location Provider sebelumnya telah dilakukan oleh Nadaf dan Srinivas (2017) dengan menyebutkan bahwa API Fused Location Provider mampu memberikan akurasi yang lebih baik dengan cara melakukan pengubahan ketersediaan Location Provider daripada penggunaan Location Provider sebelumnya .
Penggunaan Kalman Filter dalam meningkatkan akurasi pembacaan GPS pada perangkat Android untuk mendapatkan trayek jalanan yang lebih halus tanpa adanya jump points dilakukan oleh Wang dkk. (2014) dengan menggabungkan 3 buah metode diantaranya Algoritma road-matching untuk mendapatkan akurasi lokal pada level jalanan, Informasi terkait kecepatan dan arah untuk merefleksikan dengan baik trayek yang nyata dan terakhir adalah penggunaan Kalman Filter untuk mengeliminasi jump point dan membuat trayek jalanan lebih halus. Dibuktikan dengan hasil variasi data yang dihasilkan oleh Kalman Filter lebih sedikit sebanyak 41,53% dibandingkan dengan variasi data yang dihasilkan oleh GPS biasa dan sebanyak 30.17% dari variasi data yang dihasilkan oleh BaiduMap.
Penelitian mengenai teknik yang dapat dilakukan untuk meningkatkan presisi GPS dilakukan oleh Acosta dan Toloza (2012) dengan menggabungkan beberapa variasi dari Kalman Filter, Logika Fuzzy dan beberapa informasi pilihan. Metode- metode yang dikembangkan tersebut menghasilkan smoothing error dan nilai konstan dalam satuan waktu yang memungkinkan receiver GPS lainnya untuk memperbaiki posisinya sendiri.
Peningkatan akurasi pengambilan posisi GPS juga dilakukan oleh Wang dkk.
(2013) dengan menggunakan filtering algorithm based on particle filter yang mampu memperbaiki tingkat akurasi pengambilan lokasi pengguna menggunakan GPS. Dengan algoritma tersebut dihasilkan adanya peningkatan akurasi pengambilan lokasi ditunjukkan dengan nilai Root Mean Square Error (RMSE) yang lebih rendah yaitu 2,63 hingga 2,82 dibandingkan metode Extended Kalman Filter dengan nilai RMSE yang tinggi yaitu 8,91.
7 Penggabungan metode Kalman Filter dan API Fused Location Provider dilakukan pada penelitian yang dilakukan oleh Gurram dan Giri (2016) dan memberikan hasil akhir berupa pengambilan travel path terbukti lebih halus dari pada penggunaan API Fused Location Provider saja karena Kalman Filter mampu menghapus beberapa noise dan bumps yang tidak diperlukan pada saat pengambilan lokasi.
Pada Tabel 2.1 akan dijelaskan perbedaan aplikasi yang akan dikembangkan dengan beberapa penelitian yang sudah dilakukan sebelumnya. Dibandingkan dengan beberapa penelitian sebelumnya, penelitian ini sangat dekat dengan penelitian yang dilakukan oleh Gurram dan Giri (2016) yaitu menerapkan API Fused Location Provider dan Kalman Filter untuk mendapatkan travel path yang lebih halus dan penelitian yang dilakukan oleh Feng Xia dkk. (2011) dengan memanfaatkan A-GPS untuk membantu mengambil lokasi pengguna lewat Wi-Fi.
Namun, ditemukan beberapa perbedaan pada penelitian yang akan dikembangkan dengan penelitian sebelumnya, yaitu:
a. Dalam mengembangkan aplikasi Location Based Service, tidak digunakan Cell-ID, namun digunakan GPS.
b. Penelitian ini tidak melakukan pengambilan travel path, namun digunakan pengambilan titik lokasi pengguna secara real-time.
Kalman Filter akan digunakan untuk mereduksi noise dan bumps pada saat pengambilan lokasi menggunakan GPS dari perangkat Android.
8 Tabel 2.1 Kajian Pustaka
No. Nama Penelitian
Metode
Hasil GPS
Location Manager Provider
Fused Location Provider
Kalman Filter
Logika Fuzzy
Filtering algorithm
based on particle
filter
A-GPS
1. Yang dan Aoshuang (2009)
Memanfaatkan
koneksi Access Point untuk mengambil lokasi pengguna berdasarkan Access Point terdekat
- - - - -
Dilakukan pengambilan
lokasi pengguna
menggunakan berdasarkan lokasi Access Point Access Point yang tersambung dari perangkat pengguna.
2.
Feng Xia dkk.
(2011)
Digunakan A-GPS untuk mengambil lokasi pengguna berdasarkan waktu pertukaran data yang dilakukan oleh perangkat dengan Wi- Fi.
- - - - -
Dihasilkan lokasi pengguna yang baik dan dapat
diketahui bahwa
penggunaan Wi-Fi untuk mengetahui lokasi pengguna mampu meningkatkan efisiensi penggunaan baterai pengguna
9 Tabel 2.1 Kajian Pustaka (lanjutan)
No. Nama Penelitian
Metode
Hasil GPS
Location Manager Provider
Fused Location Provider
Kalman Filter
Logika Fuzzy
Filtering algorithm
based on particle
filter
A-GPS
3.
Acosta dan Toloza (2012)
Menerapkan beberapa variasi dari Kalman Filter, logika fuzzy dan beberapa informasi terpilih untuk meningkatkan presisi GPS.
- - -
Dihasilkan smoothing error dan nilai konstan dalam satuan waktu dari salah satu receiver GPS yang
memungkinkan receiver GPS lainnya untuk memperbaiki posisinya sendiri.
4.
Wang dkk.
(2013)
Menerapkan filtering algorithm based on particle filter untuk meningkatkan akurasi pengambilan lokasi menggunakan GPS.
- - - -
Dihasilkan akurasi pengambilan lokasi yang lebih baik tradisional karena karena metode yang digunakan mampu menangani permasalahan non-linier dan Gaussian
10 Tabel 2.1 Kajian Pustaka (lanjutan)
No. Nama Penelitian
Metode
Hasil GPS
Location Manager Provider
Fused Location Provider
Kalman Filter
Logika Fuzzy
Filtering algorithm
based on particle
filter
A-GPS
5.
Wang dkk.
(2014)
Menerapkan metode untuk meningkatkan akurasi pembacaan GPS pada perangkat Android untuk mendapatkan trayek jalanan yang lebih halus.
- - - -
Perangkat mampu
mendapatkan trayek jalanan yang lebih halus karena mampu mereduksi adanya jump points dan bumps yang dihasilkan dari pengambilan lokasi sebelumnya.
6.
Gurram dan Giri (2016)
Menggunakan API Fused Location Provider dan Kalman Filter untuk
mendapatkan lokasi dan rute perjalanan yang lebih halus.
- - - -
Aplikasi mampu
memberikan rute perjalanan yang lebih akurat dan lebih halusn dengan cara menghilangkan noise dan bumps.
11 Tabel 2.1 Kajian Pustaka (lanjutan)
No. Nama Penelitian
Metode
Hasil GPS
Location Manager Provider
Fused Location Provider
Kalma n Filter
Logika Fuzzy
Filtering algorithm
based on particle
filter
A-GPS
7.
Nadaf dan Srinivas (2017)
Menggunakan API Fused Location Provider untuk meningkatkan akurasi pengambilan lokasi pengguna.
- - - - -
Perangkat mampu
mendapatkan akurasi lokasi pengguna lebih baik dengan cara melakukan pengubahan ketersediaan Location Provider.
8.
Diggelen dkk.
(2018)
Melakukan perhitungan Round- Trip Time untuk menghasilkan akurasi posisi pengguna lebih baik dengan
memanfaatkan koneksi perangkat pengguna ke jaringan Wi-Fi
- - - - -
Didapatkan akurasi pengambilan lokasi
pengguna meningkat hingga 2 meter dari posisi
pengguna yang sebenarnya.
12
BAB III
LANDASAN TEORI
3.1 Global Positioning System (GPS)
Global Positioning System (GPS) merupakan alat pengukutan yang memanfaatkan teknologi satelit untuk menentukan posisi objek di permukaan bumi dengan metode ekstraterestris. Wahana satelit mengorbit mengelilingi bumi mendefinisikan koordinat dalam sistem koordinat langit dan menjadi referensi dalam membantu penentuan posisi objek (Abidin, 2007). Hofmann-Wellenhof dkk.
(2008) menyebutkan bahwa awalnya GPS digunakan oleh militer Amerika untuk kepentingan keamanan dan pertahanan. Sistem GPS didesain untuk memberikan informasi posisi suatu objek dalam sistem 3D dan disertai dengan informasi waktu secara real-time.
Konsep Time of Attendance (TOA) digunakan oleh GPS untuk menentukan posisi pengguna. Dilakukan pengukuran waktu yang diperlukan untuk sinyal yang ditransmisikan oleh emitter di lokasi yang dikenali untuk mencapai user receiver.
GPS pada umumnya menggabungkan beberapa sinyal satelit yang diterima oleh GPS receiver untuk menentukan lokasi sebenarnya. Penggambaran pengambilan posisi GPS dapat dilihat pada Gambar 3.1.:
Gambar 3. 1. Penentuan lokasi GPS dari beberapa satelit yang diterima (www.plengduit.com)
Dari gambar 3.1. terlihat bahwa terjadi interseksi antara area yang diterima oleh beberapa satelit GPS. Area interseksi tersebut yang merupakan posisi terkini
13 GPS receiver. Meskipun memiliki 24 satelit, dibutuhkan minimal 3 satelit untuk dapat mengambil lokasi.
Dengan tersedianya 24 buah satelit, GPS memiliki error diantaranya:
a. Ephemeris data: error pada lokasi yang ditransmisikan oleh satelit b. Satellite clock: error pewaktuan transmisi
c. Ionosphere: error koreksi dari psaudorange yang diakibatkan oleh efek lapisan ionosfer
d. Troposphere: error koreksi dari psaudorange yang diakibatkan oleh efek lapisan troposfer
e. Multipath: error yang diakibatkan oleh pantulan sinyal ketika memasuki GPS-receiver
f. Receiver: error pengukuran oleh receiver yang diakibatkan oleh gangguan suhu, akurasi software dan bias antar channel GPS
g. The Earth’s physical model: error yang diakibatkan oleh model atau radius bumi yang dipakai pada saat itu
3.2 Assisted-Global Positioning System (A-GPS)
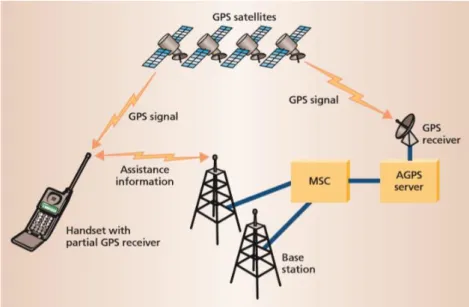
Assisted-GPS atau A-GPS adalah teknologi baru yang dimiliki oleh perangkat selular yang mengintegrasikan jaringan seluler dengan GPS untuk memberikan akurasi yang lebih baik dari 5 hingga 10 meter. Hal ini mampu memperbaiki posisi pengguna dalam hitungan detik dan memiliki cakupan yang lebih baik Singhal dan Shukla (2012). Disebutkan juga oleh Djuknic dan Richton (2001) bahwa A-GPS mampu menawarkan akurasi, ketersediaan dan jangkauan yang unggul dengan biaya yang masuk akal. Seperti yang ditunjukkan pada Gambar 3. 2., A-GPS sendiri terdiri dari:
a. Handset nirkabel dengan receiver GPS parsial
b. Server A-GPS dengan referensi receiver GPS yang secara bersamaan dapat melihat satelit yang sama seperti handset
c. Infrastruktur jaringan nirkabel yang terdiri dari base station dan mobile switching center
14
Gambar 3. 2. Konsep A-GPS (Djuknic dan Richton, 2001)
Dalam penggunaannya, A-GPS memiliki kelebihan yang dapat dimanfaatkan dengan baik untuk mengembangkan berbagai macam sistem yang mampu
memenuhi kebutuhan manusia, diantaranya :
a. Memiliki akurasi, ketersediaan dan cakupan yang sangat baik
b. Peta dan basis data mampu meningkatkan akurasi lokasi jika pemrosesan dilakukan menggunakan jaringan
c. Memberikan pengaruh minimal pada penggunaan baterai (lebih hemat baterai)
d. Biaya penerapan terbagi oleh perangkat selular dan jaringan itu sendiri e. Sistem akan berkembang seiring dengan peningkatan jaringan
f. Data lokasi terbai diantara pengguna dan network operator. Usser dapat menyimpan data dengan alasan privasi dan operator dapat membatasi bantuan untuk pelayanan pelanggan
A-GPS juga memiliki kekurangan sebagai berikut :
a. Bantuan jaringan mampu meningkatkan beban sinyal
b. Interoperabilitas antara jaringan dan perangkat selular membutuhkan standar tambahan dam mampu menunda penyebaran
c. Dibutuhkan adanya handset baru atau peningkatan handset untuk penyebaran awal
15 3.3 GPS pada Smartphne
Uddin dan Islam (2013) menyebutkan bahwa dengan cepat GPS dijadikan salah satu standar yang harus dimiliki oleh setiap perangkat selular. Hal ini juga diterapkan pada perangkat selular jenis Android yang semakin populer digunakan untuk berbagai jenis kebutuhan dalam kehidupan sehari-hari. Dengan penggunan GPS pada perangkat Android tersebut secara umum dikenal sebagai sebuah sistem dengan nama sistem GPS berbasis tracking lokasi pada perangkat Android.
Fungsi utama dari GPS pada perangkat Android sendiri adalah untuk memantau dan merekam jejak perjalanan pengguna kemana pun pengguna pergi. Fungsi tersebut dapat juga dimanfaatkan untuk melakukan pemantauan atau monitoring posisi pengguna dengan cara melakukan pembaruan lokasi atau update lokasi pengguna secara berkala.
Salah satu alasan mengapa GPS dijadikan standar utama dari sebuah perangkat selular khususnya Android adalah ketersediaan GPS itu sendiri dan dapat diandalkan sepanjang waktu selama perangkat pengguna memiliki koneksi internet yang kuat dan baterai yang cukup. Namun, untuk memanfaatkan GPS pada perangkat Android ini diperlukan adanya koneksi internet yang cepat dan stabil, server database, server web dan perangkat lunak pendukung lainnya
3.3.1 Application Programming Interface (API) pada Android
Disebutkan oleh Addina (2017) Application Programming Interface (API) adalah sebuah bahasa dan format pesan yang digunakan oleh sebuah program untuk berkomunikasi dengan sistem operasi atau pengendali program lainnya seperti sistem manajemen basis data atau Database Management System (DBMS) atau protokol komunikasi. API diimplementasikan dengan menuliskan function calls di dalam program yang memberikan koneksi kepada subroutine yang dibutuhkan untuk dieksekusi.
Maka dari itu, sebuah API menunjukkan function calls di dalam program, yang memberikan koneksi pada subroutine yang dibutuhkan untuk eksekusi.
Sehingga, sebuah API menunjukkan bahwa beberapa modul program telah tersedia di dalam komputer untuk menjalankan operasi atau bahwa modul
16 program tersebut dapat dihubungkan ke sebuah program yang telah ada untuk melakukan tugas yang telah ditentukan.
3.3.2 Fused Location Provider API
Disebutkan dalam web Google Developer developers.google.com pada tahun 2018 Fused Location Provider (FLP) API adalah sebuah API lokasi yang disediakan oleh Google Play Services yang dengan cerdas mampu menggabungkan sinyal untuk memberikan informasi lokasi yang dibutuhkan oleh aplikasi pengguna.
FLP mampu mengelola teknologi lokasi yang mendasarinya, seperti GPS dan Wi-Fi. Selain itu, FLP mampu menyediakan API sederhana yang dapat digunakan untuk menentukan kualitas layanan yang diperlukan. Misalnya, pengguna dapat meminta data paling akurat yang tersedia atau akurasi tebaik yang mungkin bisa didapatkan tanpa adanya konsumsi daya tambahan.
Aplikasi yang menggunakan FLP dapat memanfaatkan sinyal yang disediakan oleh beberapa sensor dalam perangkat untuk menentukan lokasi perangkat dan secara otomatis mampu memilih kombinasi sinyal yang tepat.
3.4 Konversi Lokasi
Data yang akan digunakan untuk melakukan estimasi lokasi menggunakan Kalman Filter berjenis data lokasi dalam bentuk titik koordinat. Pratista (2009) menyebutkan bahwa titik koordinat adalah titik pertemuan antara kedua garis lintang dan garis bujur. Garis lintang adalah garis dari atas ke bawah (vertical) yang menghubungkan kutub utara dengan kutub selatan bumi, sedangkan garis bujur adalah garis mendatar (horizontal) yang sejajar dengan garis khatulistiwa (Achmaliadi dkk, 2005)
Penulisan titik koordinat memiliki dua cara penulisan, yaitu Decimal Degree (DD) dan Degrees Minutes Seconds (DMS). Berikut ini cara penulisan titik koordinat :
1) Decimals Degrees (DD)
Latitude (Lintang) : 122.2056608 Longitude (Bujur) : - 4.2824
17 2) Degrees Minutes Second (DMS)
Latitude (Lintang) : 122° 12’ 20.3796”
Longitude (Bujur) : - 4° 16’ 46.6394”
Titik koordinat yang akan digunakan dalam sistem adalah dengan jenis Decimal Degrees (DD) sedangkan dalam Kalman Filer, proses estimasi lokasi akan dihitung menggunakan satuan meter. Maka dari itu perlu dilakukan konversi lokasi pengguna dari lokasi Geografis ke Universal Transverse Mercator (UTM).
Salah satu proyeksi peta dan sistem grid yang paling banyak digunakan adalah sistem UTM. UTM saat ini banyak digunakan tidak hanya untuk keperluan militer namun untuk survey umum dan pemetaan serta untuk navigasi baik di darat maupun di laut. Dalam sistem UTM, bumi, antara 80°S dan 84°LU, dibagi menkadi 60 zona.
Masing-masing umumnya memiliki lebar bujur 6 derajat. Dengan pengecualian kecil, zona diberi nomor dari 1 hingga 60 mulai dari 180° dan melanjutkan kearah timur. Dalam hal ini UTM akan direpresentasikan ke dalam sumbu X dan sumbu Y.
Konversi tersebut akan ditunjukan pada contoh berikut ini:
Titik Lokasi : (7.76628, 110.37676) Dilakukan konversi ke standar UTM (meter):
Sumbu X : 43179.60
Sumbu Y : 9141489.61
Sumbu X dan sumbu Y diatas selanjutnya akan digunakan dalam proses estimasi lokasi baru pada Kalman Filter sehingga dihasilkan sumbu X dan sumbu Y yang estimasi. Lalu, dilakukan konversi kembali ke bentuk Geografis.
Dimisalkan sumbu X dan sumbu Y yang baru adalah sebagai berikut:
Sumbu X : 43190.60
Sumbu Y : 9141489.61
Dilakukan transformasi kembali ke bentuk Geografis (Lat, Long):
Latitude : 7.7662796 Longitude : 110.37686
18 Prihandito (2010) memberikan persamaan untuk melakukan transformasi dari Geografis ke UTM dan sebaliknya, dari UTM ke Geografis. Transformasi dari Geografis ke UTM dapat menggunakan persamaan (3.1) hingga persamaan (3.6).
𝑋 = (a
𝜌) Δ𝜆 (3.1)
𝑌 = (𝐴1)𝜑 + (𝐴3)𝜑3+ (𝐴5)𝜑5+ ⋯ (3.2) 𝐴1 = {a(1−𝑒2)}
𝜌 (3.3)
𝐴3 = {a(1−𝑒2−2𝑒4)}
6𝜌3 (3.4)
𝐴5 = {a(5−𝑒2+20𝑒4−24𝑒6)}
120𝜌5 (3.5)
Pada persamaan (3.1) nilai dari a adalah setengah sumbu panjang dari elips, 𝜌 adalah sebuah ketetapan atau konstanta radian bernilai 57°29578, dan 𝜆 adalah nilai longitude atau bujur. Sedangkan pada persamaan (3.2), diketahui bahwa 𝜑 adalah latitude atau lintang. Pada persamaan (3.3) hingga (3.5) terdapat parameter 𝑒2, 𝑒4, 𝑒5dan 𝑒6 yang merupakan parameter utama elipsoid. Sedangkan untuk transformasi dari UTM ke Geografis dapat dilihat pada persamaan (3.6) hingga (3.11)
Δ𝜆 = (𝜌
a) 𝑋 (3.6)
𝜑 = (𝐵1)𝑌 − (𝐵3)𝑌3+ (𝐵5)𝑌5+ ⋯ (3.7) 𝐵1 = 𝜌
{a(1−𝑒2)} (3.9)
𝐵3 = {𝜌(1+𝑒2)}
{6a3(1−𝑒2)3} (3.10)
𝐵5 = {𝜌(5+36𝑒2+16𝑒4)}
{120a3(1−𝑒2)3} (3.11)
19 3.5 Kalman Filter
Kalman filter merupakan sebuah metode yang dapat digunakan untuk mengestimasi hasil berikutnya berdasarkan data terkini. Algoritma ini biasanya dipakai untuk mengestimasi maupun filter untuk data yang memiliki noise atau gangguan. Kalman filter memanfaatkan konsep dari hitung kuadrat terkecil untuk meningkatkan identifikasi hasil pemodelan yang didapat (Hofmann-Wellenhof dkk., 2008). Disebutkan oleh Jiao dkk. (2016) bahwa Kalman filter adalah salah satu metode untuk meningkatkan akurasi posisi.
Berdasarkan pengertian yang sudah disebutkan, Kalman filter memiliki fungsi untuk menghasilkan data estimasi untuk data selanjutnya berdasarkan data observasi awal yang mengandung gangguan (noise) pada hasil ukuran posisi GPS (Burl, 1999). Kalman Gain yang dihasilkan dalam perhitungan Kalman filter mampu berubah-ubah menyesuaikan dengan keadaan yang dialami oleh sensor sehingga mampu dihasilkan filter yang lebih hasil pada error yang dialami oleh sensor.
Secara umum, algoritma Kalman filter memiliki 4 proses yaitu inisialisasi, prediksi, observasi dan estimasi yang melalui proses berdasarkan satuan waktu.
Proses inisialisasi dimulai dengan memberikan nilai awalan yang menjadi acuan untuk estimasi data berikutnya. Proses kedua adalah menggunakan nilai inisialisasi dan pemodelan awal untuk melakukan prediksi pertama. Setelah itu, observasi dilakukan dengan cara melakukan pengambilan data yang baru untuk dibandingkan dengan data yang sebelumnya. Langkah terakhir yang dilakukan adalah estimasi dimana didalamnya adalah meliputi pemakaian nilai prediksi yang sudah diproses untuk mendapatkan nilai estimasi yang baru. Secara umum blok diagram Kalman filter yang banyak digunakan sebagai aturan baku algoritma ini digambarkan pada Gambar 3.3:
20
Gambar 3. 3 Diagram proses Kalman Filter
Kalman Filter mengasumsikan model state ke dalam (3.12)
𝑋𝑘𝑝 = 𝐴. 𝑋𝑘−1+ 𝐵. 𝑢𝑘 (3.12)
Dimana 𝑋𝑘𝑝 merupakan state dari sistem terhadap p atau predicted dan 𝑋𝑘−1 merupakan state dari sistem terhadap waktu k-1 atau previous state yang didefinisikan dalam matriks (3.13)
𝑋𝑘−1= [ 𝑥 𝑦 𝑥̇
𝑦̇
] (3.13)
Dalam (3.13) terapat x dan dan y yang merupakan data pengukuran lokasi dan terdiri dari latitude dan longitude lokasi yang sudah ditransformasikan ke dalam satuan meter. Sedangkan, 𝑥̇ dan 𝑦̇ merupakan velocity yang dimiliki oleh lokasi
21 tersebut dengan satuan m/s. Matriks A merupakan sebuah matriks transisi yang digunakan pada previous state (𝑋𝑘−1). Matriks A didefinisikan dalam (3.14)
𝐴 = [
1 0 ∆𝑇 0
0 1 0 ∆𝑇
0 0 1 0
0 0 0 1
] (3.14)
Matriks B merupakan matriks dari kontrol input model atau juga disebut sebagai coupling matrix yang didefinisikan terhadap perubahan waktu. Matriks B didefinisikan dalam (3.15)
𝐵 = [
1
2∆𝑇2 0
0 1
2∆𝑇2
∆𝑇 0
0 ∆𝑇 ]
(3.15)
Sedangkan u adalah matriks kontrol variable yang merepresentasikan variable yang berpengaruh dalam proses state matrix seperti contohnya gravitasi, akselerasi, dan lain-lain. Pada penelitian ini akan digunakan akselerasi sesuai dengan posisi x dan dan y. Kontrol variable matriks didefinisikan terhadap perubahan waktu.
Matrix ini dalam dijelaskan dalam matriks (3.16) 𝑢 = [𝑎𝑥
𝑎𝑦] (3.16)
Pada tahap prediksi juga diasumsikan model state covariance atau error covariance dalam (3.17)
𝑃𝑘𝑝 = 𝐴. 𝑃𝑘−1𝐴𝑇+ 𝑄𝑘 (3.17)
𝑃𝑘𝑝 merupakan matriks state covariance dari sistem terhadap p atau predicted sedangkan 𝑃𝑘𝑝 adalah merupakan matriks state covariance dari sistem terhadap waktu k-1 atau previous state didefinisikan dalam matriks (3.18)
22 𝑃𝑘−1 =
[
∆𝑃𝑥2 ∆𝑃𝑥∆𝑃𝑣𝑥 ∆𝑃𝑥∆𝑃𝑦 ∆𝑃𝑥∆𝑃𝑣𝑦
∆𝑃𝑥∆𝑣𝑥 ∆𝑃𝑣𝑥2 ∆𝑃𝑣𝑥∆𝑃𝑦 ∆𝑃𝑣𝑥∆𝑃𝑣𝑦
∆𝑃𝑥∆𝑦 ∆𝑃𝑣𝑥∆𝑃𝑦 ∆𝑃𝑦2 ∆𝑃𝑦∆𝑃𝑣𝑦
∆𝑃𝑥∆𝑣𝑦 ∆𝑃𝑣𝑥∆𝑃𝑣𝑦 ∆𝑃𝑦∆𝑃𝑣𝑦 ∆𝑃𝑣𝑦2 ]
(3.18)
∆𝑃𝑥 dan ∆𝑃𝑦 adalah noise lokasi yang dihasilkan saat pertama kali aplikasi dinyalakan, sedangkan ∆𝑃𝑣𝑥 dan ∆𝑃𝑣𝑦 adalah noise velocity yang dihasilkan saat pertama kali aplikasi dinyalakan. Pada model ini juga digunakan matriks 𝐴𝑇 atau matriks A transpose yang didefinisikan dalam matriks (3.19)
𝐴𝑇 = [
1 0 0 0
0 1 0 0
∆𝑇 0 1 0
0 ∆𝑇 0 1
] (3.19)
𝑄𝑘 adalah matriks kovarian proses noise yang berfungsi untuk menjaga nilai Pk
tidak terlalu rendah atau mendekati 0. Namun nilai 𝑄𝑘 juga dapat diisi dengan 0 karena sebuah alat atau benda yang mampu melakukan tracking terhadap sesuatu yang bernilai statis seperti GPS, nilai 𝑄𝑘 nya dapat diisi dengan 0 (Grewal dan Andrews, 2001).
Pada tahap koreksi dalam Kalman Filter atau K , dilakukan perhitungan untuk mendapatkankan nilai Kalman Gain dalam (3.20).
𝐾 = 𝑃𝑘𝑝𝐻
𝑇
𝐻𝑃𝑘𝑝𝐻𝑇+𝑅 (3.20)
Dalam (3.20) digunakan beberapa variable seperti 𝑃𝑘𝑝 yang didapatkan dari perhitungan (3.17). Digunakan juga matriks H yang juga disebut sebagai model observasi yang digunakan untuk memetakan dari true state space ke dalam observed space. Dikarenakan true state tidak dapat diobservasi, maka matriks H dapat diberikan pada (3.10)
𝐻 = [
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
] (3.21)
23 Selain matriks H, digunakan juga matriks 𝐻𝑇 H transpose seperti pada (3.22)
𝐻𝑇 = [
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
] (3.22)
Matriks R juga digunakan dalam menentukan Kalman Gain. Matriks R disebut juga sebagai measurement noise covariance dan dapat diketahui dengan cara memasukkan noise yang diperoleh dari observasi atau saat pengambilan data.
Matriks R dapat didefinisikan pada (3.23)
𝑅 = [
∆𝑥2 ∆𝑥∆𝑣𝑥 ∆𝑥∆𝑦 ∆𝑥∆𝑣𝑦
∆𝑥∆𝑣𝑥 ∆𝑣𝑥2 ∆𝑣𝑥∆𝑦 ∆𝑣𝑥∆𝑣𝑦
∆𝑥∆𝑦 ∆𝑣𝑥∆𝑦 ∆𝑦2 ∆𝑦∆𝑣𝑦
∆𝑥∆𝑣𝑦 ∆𝑣𝑥∆𝑣𝑦 ∆𝑦∆𝑣𝑦 ∆𝑣𝑦2 ]
(3.23)
∆𝑥 dan ∆𝑦 adalah noise lokasi sedangkan ∆𝑣𝑥 dan ∆𝑣𝑦 adalah noise velocity yang dihasilkan saat pengambilan data saat ini dilakukan. Langkah selanjutnya setelah menentukan Kalman Gain adalah menentukan nilai measurement input atau 𝑌𝑘 yang dijelaskan dalam (3.24)
𝑌𝑘 = 𝐻𝑌𝑘𝑚+ 𝑍𝑘 (3.24)
𝑌𝑘𝑚 adalah matriks state yang terbaru yang diambil dari lokasi dan velocity yang dimiliki oleh posisi tersebut. Matriks 𝑌𝑘𝑚 dapat dilihat pada (3.25)
𝑌𝑘𝑚 = [ 𝑥 𝑦 𝑥̇
𝑦̇
] (3.25)
Terdapat matriks 𝑍𝑘 yang merupakan matriks yang berisi matriks selisih lokasi dan velocity aktual dan lokasi observer atau lokasi pengukuran.
Selanjunya dilakukan update estimasi nilai state dengan memasukkan matriks dari measurement input yang dimodelkan dalam 𝑋𝑘 merupakan state dari sistem terhadap waktu k atau current state yang didefinisikan dalam matriks (3.26)
24 𝑋𝑘= 𝑋𝑘𝑝 + 𝐾 [𝑌𝑘− 𝐻𝑋𝑘𝑝] (3.26) Pada (3.26), 𝑋𝑘𝑝 digunakan dari hasil proses (3.12), matriks Kalman Gain atau K dari (3.20), matriks 𝑌𝑘 dari (3.24) dan juga digunakan matriks H. Hasil dari tahap ini akan menjadi nilai input pada proses (3.12) menggantikan nilai 𝑋𝑘−1 dari (3.13).
Tahap akhir, dilakukan update terhadap matriks error covariance yang didefinisikan terhadap (3.27)
𝑃𝑘 = (𝐼 − 𝐾𝐻)𝑃𝑘𝑝 (3.27)
Pada (3.27), 𝑃𝑘𝑝 digunakan dari hasil proses (3.17), matriks Kalman Gain atau K dari (3.20) matriks H serta matriks I atau identitas pada (3.17)
𝐼 = [
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
] (3.28)
3.6 Haversine
Formula Haversine adalah persamaan yang digunakan dalam navigasi, yang memberikan jarak lingkaran besar antara dua titik pada permukaan bola (bumi) berdasarkan bujur dan lintang. Formula Haversine merupakan suatu metode untuk mengetahui jarak antar dua titik dengan memperhitungkan bahwa bumi bukanlah sebuah bidang datar namun adalah sebuah bidang yang memilki derajat kelengkungan (Yulianto dkk., 2018). Formula Haversine dapat dijelaskan pada persamaan (3.29) hingga persamaan (3.34)
𝑅 = 𝑅𝑎𝑑𝑖𝑢𝑠 𝐵𝑢𝑚𝑖 = 6371 𝐾𝑚 (3.29)
∆𝑙𝑎𝑡 = 𝑙𝑎𝑡2 − 𝑙𝑎𝑡1 (3.30)
∆𝑙𝑜𝑛𝑔 = 𝑙𝑜𝑛𝑔2 − 𝑙𝑜𝑛𝑔1 (3.31)
𝑎 = 𝑠𝑖𝑛2(∆𝑙𝑎𝑡
2 ) + cos(𝑙𝑎𝑡1) cos(𝑙𝑎𝑡2) 𝑠𝑖𝑛2(∆𝑙𝑜𝑛𝑔
2 ) (3.32)
𝑐 = 2. 𝑎𝑡𝑎𝑛2 (√𝑎, √1 − 𝑎) (3.33)
𝑑 = 𝑅. 𝑐 (3.34)