BAB 2 DASAR TEORI
Dalam bab ini penulis akan membahas tentang komponen–komponen yang digunakan dalam seluruh unit sistem ini. Agar pembahasan tidak melebar dan menyimpang dari topik utama laporan ini, maka setiap komponen hanya dibahas sesuai dengan fungsi nya pada masing-masing unit.
2.1 Mikrokontroller AT89C51
AT89C51 adalah mikrokontroller keluaran Atmel dengtan 4 K byte Flash PEROM ( Programmable and Erasable Read Only Memory ), AT89C51 merupakan memori dengan teknologi nonvolatile memory, isi memory tersebut dapat diisi ulang ataupun dihapus berkali-kali .
Memory ini biasa digunakan untuk menyimpan instruksi ( perintah ) berstandar MCS-51 code sehingga memungkinkan mikrokontroller ini untuk bekerja dalam mode single chip operation ( mode operasi keeping tunggal ) yang tidak memerlukan external memory ( memory luar ) untuk menyimpan source tersebut .
xv
2.1.1. Arsitektur Mikrokontroller AT89C51
xvii
Gambar 2.1 Blok diagram fungsional AT89C51
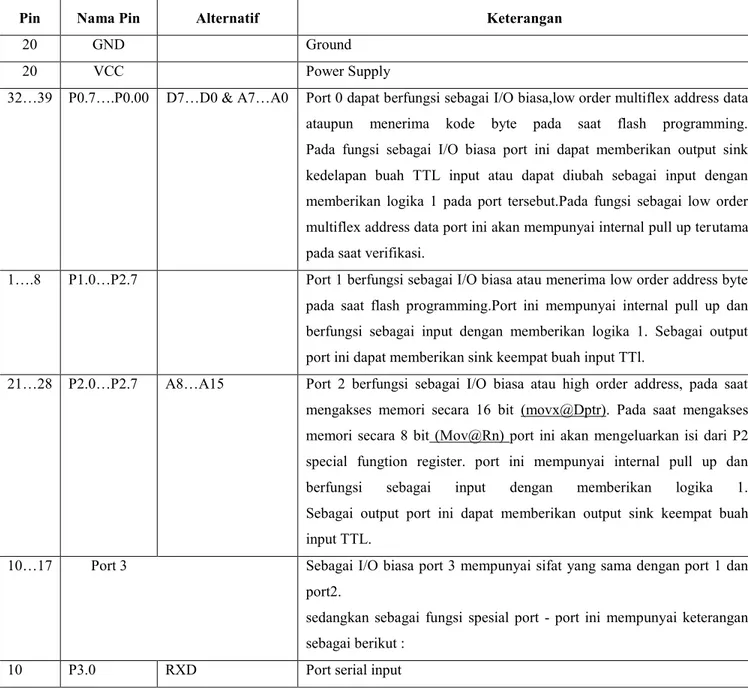
Tabel 2.2 Deskripsi Pin Nomor
Pin Nama Pin Alternatif Keterangan
20 GND Ground
20 VCC Power Supply
32…39 P0.7….P0.00 D7…D0 & A7…A0 Port 0 dapat berfungsi sebagai I/O biasa,low order multiflex address data ataupun menerima kode byte pada saat flash programming. Pada fungsi sebagai I/O biasa port ini dapat memberikan output sink kedelapan buah TTL input atau dapat diubah sebagai input dengan memberikan logika 1 pada port tersebut.Pada fungsi sebagai low order multiflex address data port ini akan mempunyai internal pull up terutama pada saat verifikasi.
1….8 P1.0…P2.7 Port 1 berfungsi sebagai I/O biasa atau menerima low order address byte pada saat flash programming.Port ini mempunyai internal pull up dan berfungsi sebagai input dengan memberikan logika 1. Sebagai output port ini dapat memberikan sink keempat buah input TTl.
21…28 P2.0…P2.7 A8…A15 Port 2 berfungsi sebagai I/O biasa atau high order address, pada saat mengakses memori secara 16 bit (movx@Dptr). Pada saat mengakses memori secara 8 bit (Mov@Rn) port ini akan mengeluarkan isi dari P2 special fungtion register. port ini mempunyai internal pull up dan berfungsi sebagai input dengan memberikan logika 1. Sebagai output port ini dapat memberikan output sink keempat buah input TTL.
10…17 Port 3 Sebagai I/O biasa port 3 mempunyai sifat yang sama dengan port 1 dan port2.
sedangkan sebagai fungsi spesial port - port ini mempunyai keterangan sebagai berikut :
11 P3.1 TXD Port serial output 12 P3.2 INT0 Port External Interrupt 0 13 P3.3 INT1 Port External Interrupt 1 14 P3.4 TO Port External Timer 0 Input 15 P3.5 T1 Port External Timer 1 Input 16 P3.6 WR Port Data Memory Write Stroble 17 P3.7 RD Port Data Memory Read Stroble
9 RST Reset akan aktif dengan memberikan input high selama 2 cycle.
30 ALE PROG Pin ini dapat berfungsi sebagai Address Latch Enable (ALE) yang me-latch byte address pada saat mengakses memory eksternal. Sedangkan pada saat flash programming (PROG) berfungsi sebagai fulse input untuk pada operasi ALE akan mengeluarkan sinyal clock sebesar 1/16 frekuensi oscillator kecuali pada saat mengkakses memori eksternal. Sinyal clock pada pin ini dapat pula di disable dengan men-set bit 0 dari special fungtion register dialamat 8 EH ALE hanya aktif pada saat mengakses memori eksternal (MOVX & MOVC).
29 PSEN Pin ini berfungsi pada saat mengeksekusi program yang terletak pada memori ekternal. PSN akan aktif pada 2 kali setiap cycle.
31 EA VP Pada kondisi low maka pin akan berfungsi sebagai EA yaitu mikrokontroller akan menjalankan program yang ada memori eksternal setelah sistem diriset. Apabila berkondisi high maka pin ini akan berfungsi untuk menjalankan program yang ada pada memori internal. Pada saat flash programming pin ini akan mendapatkan tegangan 12 Volt (VP)
19 XTAL1 Input Oscillator
18 XTAL2 Output Oscillator
2.1.2 Struktur Memori
Memori dari AT89C51 terbagi menjadi : 2.1.2.1 Ram Internal
xix
Register Bank
Bit addressable RAM General Purpose RAM
2.1.2.2 Register Fungsi Khusus ( Special Function Register ) 2.1.2.3 Flash PEROM
2.1.2.1. RAM Internal
RAM Internal terdiri dari : Register Bank
AT89C51 mempunyai delapan buah register yang terdiri atas R0 hingga R7 . Kedelapan buah register ini selalu terletak pada alamat 00H hingga 07 H pada setiap kali sistem direset . Namun, hingga posisi R0 dan R7 dapat dipindahkan ke Bank 1 ( 08 hingga 0FH ). Bank 2 ( 10H hingga 17H ) atau Bank 3 ( 18H hingga 1FH ) dengan mengatur bit RS0 dan RS1.
Bit addressable RAM
RAM pada alamat 20H hingga 2FH dapat diakses secara pengalamatan bit ( bit addressable ) sehingga hanya dengan sebuah instruksi saja setiap bit dalam area ini dapat diset,clear,AND dan OR .
Dengan adanya sistem bit addressable RAM, proses yang seharusnya dijalankan dengan tiga cycle seperti pada listing diatas
dapat digantikan dengan instruksi yang hanya membutuhkan satu cycle saja .
RAM Keperluan Umum ( General Purpose RAM )
RAM keperluan umum dimulai dari alamat 30H hingga 7FH dan dapat diakses dengan pengalamatan langsung maupun tidak langsung . Pengalamatan langsung dilakukan ketika salah satu operand merupakan bilangan yang menunjukkan lokasi yang dialamati. Sedangkan pengalamatan secara tak langsung pada lokasi dari RAM internal ini adalah akses data dari memori ketika alamat memori tersebut tersimpan dalam suatu register R0 atau R1 adalah dua buah register pada mikrokontroller berasitektur MCS 51 yang dapat digunakan sebagai pointer dari sebuah lokasi memori pada RAM internal.
2.1.2.2 Register fungsi Khusus
AT89C51 mempunyai 21 Special Function Register ( Register Fungsi Khusus) yang terletak pada antara alamat 80H hingga FFH . Beberapa dari register-register ini mampu dialamati dengan pengalamatan bit sehingga dapat dioperasikan seperti yang ada pada RAM yang lokasinya dapat dialamati dengan pengalamatan bit.
xxi
2.1.2.3 Flash PEROM
AT89C51 mempunyai 4 Kb Flash Perom ( Programmable erasable Read Only Memory ), yaitu ROM yang dapat ditulis ulang atau dihapus menggunakan sebuah perangkat programmer. Flash PEROM dalam Atmel’s High-density Non Volatile Technology yang mempunyai kemampuan untuk ditulis ulang hingga 1.000 kali dan berisikan perintah standard MC51.
Program yang ada pada Flash PEROM akan dijalankan jika pada sistem di reset, pin EA/VP berlogika satu sehingga mikrokontroller aktif berdasarkan program yang ada pada Flash PEROM-nya. Namun jika pin EA/VP berlogika nol, mikrokontroller aktif berdasarkan program yang ada pada memori eksternal .
2.1.3. Reset
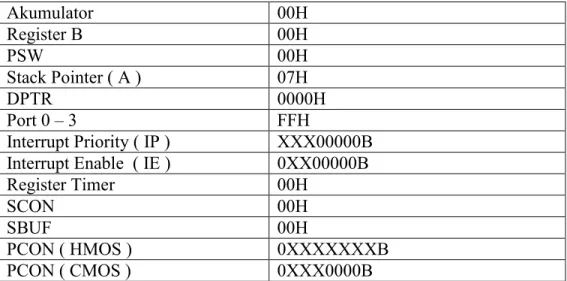
Reset dapat dilakukan secara manual maupun otomatis saat power diaktifkan (Power and Reset ). Saat terjadi reset isi dari register akan berubah sesuai yang ada pada tabel 2.2.
Tabel 2.2. Isi Rangkaian Setelah Reset
Register Isi Register
Akumulator 00H Register B 00H PSW 00H Stack Pointer ( A ) 07H DPTR 0000H Port 0 – 3 FFH Interrupt Priority ( IP ) XXX00000B Interrupt Enable ( IE ) 0XX00000B Register Timer 00H SCON 00H SBUF 00H PCON ( HMOS ) 0XXXXXXXB PCON ( CMOS ) 0XXX0000B
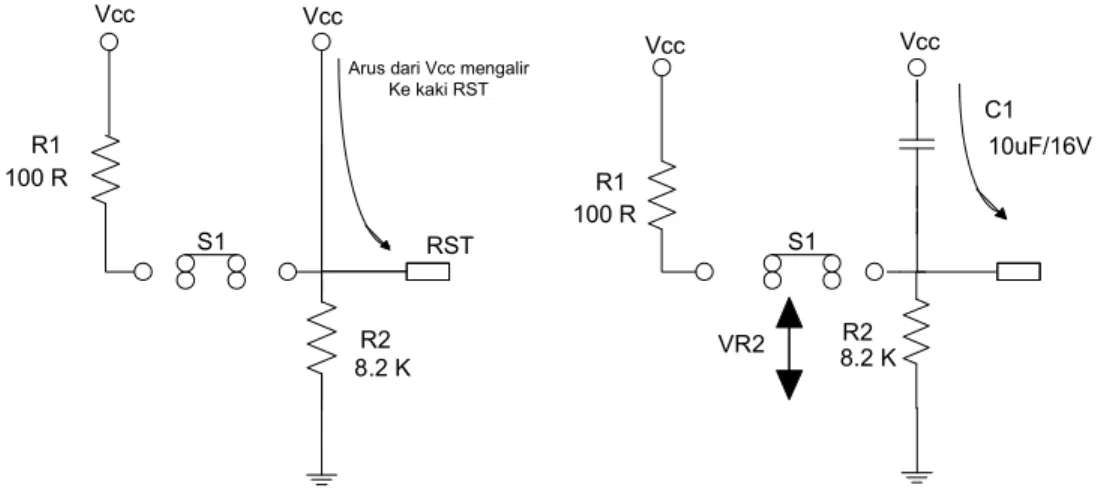
Reset terjadi dengan adanya logika 1 selama minimal 2 cycle pada kaki RST. Setelah kondisi pin RST kembali Low, mikrokontroller akan mulai menjalankan program dari alamat 0000H. Kondisi pada internal RAM tidak terjadi perubahan selama reset.
Gambar diatas merupakan gambar rangkaian reset yang bekerja secara manual maupun otomatis saat sumber daya diaktifkan . Pada saat sumber daya diaktifkan , maka kapasitor C1 sesuai dengan sifat kapasitor akan terhubung singkat tegangan pada kapasitor ( Vc
)yaitu tegangan antara VCC dan titik antara kapasiotor C1 dan Resistor R2 mencapai
VCC, otomatis tegangan pada R2atau tegangan RST akan turun menjadi 0 sehingga kaki
RST akan berlogika 0 ( seperti gambar disebelahnya ) dan proses reset selesai. Vcc= 5 Volt.
xxiii RST Vcc R2 R2 8.2 K S1 Vcc Vcc
Arus dari Vcc mengalir Ke kaki RST 8.2 K S1 R1 100 R C1 10uF/16V VR2 R1 100 R Vcc
Gambar 2.3 Aliran Arus dan Perubahan Tegangan Pada Reset Otomatis
2.1.4. Instruksi Transfer Data
Instruksi transfer data terbagi menjadi dua kelas operasi sebagai berikut :
1. Transfer data umum ( general Purpose Transfer ), yaitu : MOV,PUSH dan POP.
2. Transfer spesifik Akumulator (Accumulator Spesific Transfer),yaitu : XCH,XCHD, dan MOVC.
Instruksi transfer data adalah instruksi pemindahan atau pertukaran antara operand tujuan. Operand-nya dapat berupa register ,memori atau suatu memori.
Deskripsi instruksi transfer data tersebut dapat dijelaskan sebagai berikut : 1. MOV = Transfer bit atau byte dari operand sumber ke operand tujuan 2. PUSH = Transfer byte dari operand sumber ke suatu lokasi stack yang
ditunjuk oleh register penunjuk ( stack pointer ). 3. POP = Transfer byte dalam stack ke operand tujuan.
4. XCH = Pertukaran data antara operand akumulator dengan operand sumber.
5. XCHD = Pertukaran nibble rendah antara RAM internal ( lokasinya ditunjukkan oleh R0 dan R1 ) dengan akumulator .
2.1.5. Instruksi Aritmatika ( Instruksi Perhitungan )
Operasi dasar aritmatika seperti penjumlahan,pengurangan, perkalian dan pembagian dimiliki oleh AT89C51 dengan mnemonic, INC, ADD, ADDC, SUBB, DEC, MUL dan DIV.Deskripsi mnemonic tersebut dapat dijelaskan sebagai berikut :
1. INC = Menambahkan satu isi sumber operand dan menyimpan hasilnya ke operand tersebut .
2. ADD = Penjumlahan antara akumulator dengan sumber operand,lalu dikurangi satu bila CY diset,hasilnya disimpan daloam operand tersebut .
3. ADDC = Hasil dari instruksi ADD ditambah satu bila CY diset.
4. SUBB = Pengurangan akumulator dengan sumber operand dengan satu, dan hasilnya disimpan dalam operand tersebut.
5. DEC = Mengurangi sumber operand dengan satu, dan hasilnya disimpan dalam operand tersebut .
6. MUL = Perkalian antara akumulator dengan register B.
7. DIV = Pembagian antara akumulator dengan register B dan hasilnya disimpan dalam akumulator, sisanya di register B .
xxv
2.1.6. Instruksi Logika
Mikrokontroller AT89C51 dapat melakukan operasi logika bit maupun operasi logika byte. Operasi logika tersebut dibagi atas dua bagian, yaitu :
Operasi Logika Operand Tunggal
Yaitu terdiri dari : CLR ,SETB , CPL , RLC , RR , RRL dan SWAB. Operasi logika ke operand
Yaitu terfiri dari : ANL, ORL , dan XRL
Operasi yang dilakukan oleh AT89C51 dengan pembacaan instruksi logika dapat dijelaskan sebagai berikut :
CLR -- Menghapus bit atau byte menjadi satu. SETB -- Menset bit atau byte menjadi satu. CPL -- Mengkomplemenkan akumulator.
RL -- Rotasi akumulator 1 bit digeser melalui carry flag RR -- Rotasi akumulator 1 bit ke kanan
RRL -- Rotasi akumulator 1 bit ke kiri
SWAB-- Pertukaran nibble orded rendah dengan nibble orded Tinggi
ANL -- Operasi logika AND dan hasilnya disimpan dalam operand pertama ORL -- Operasi logika OR dan hasilnya disimpan dalam operand pertama XRL -- Operasi logika X-OR dan hasilnya disimpan dalam operand pertama
2.1.7 Instruksi Transfer Kendali
Instruksi transfer kendali ( control transfer ) terdiri dari tiga kelas operasi yaitu Lompat tidak Bersayarat ( Unconditional Jump )
Yaitu terdiri dari : ACALL ,AJMP , LJMP ,JMP@A + DPTR. Lompat bersyarat ( Conditioning Jump )
Yaitu terdiri dari : JZ , JNZ , JNB , CJNE dan DJNZ Interupsi
Yaitu terdiri dari : RET 1 dan RET.
Instruksi diatas dapat dijelaskan sebagai berikut :
ACALL = Pemanggilan subrutin yang mempunyai alamat antara 2 Kbyte sampai dengan 64 Kbyte
AJMP = Lompat untuk percabangan 2 Kbyte LJMP = Lompat untuk percabangan 64 Kbyte
JMP@A+DPTR = Instruksi percabangan ke suatu lokasi yang ditunjuk oleh DPTR + isi akumulator. Instruksi pemanggilan subrutin bila alamat subrutin tidak dari 2 Kbyte.
JNB = Percabangan jika bit tidak diset.
JZ = Percabangan akan dilakuakan jika isi akumulator adalah nol.
xxvii
CJNE = Operasi perbandingan operand pertama dengan operand kedua, jika tidak sama akan dilakukan percabangan.
DJNZ = Mengurangi isi operand sumber dan percabangan akan dilakukan apabila isi operand tersebut tidak nol.
RET = Kembali ke subrutin
RET1 = Instruksi kembali ke program intrusi utama
Sebagai operand dari perlengkapan instruksi tersebut dapat dijelaskan sebagai berikut :
Rn = Register R0 sampai R7 yang dipilih dari kumpulan register.
Data = Lokasi alamat data internal 8 bit, yang dilokasikan pada data RAM internal, 90-127 SFR pada 128 – 255 (I/O port register pengontrol, register status.
R1 = Data RAM internal lokasi 0 -255 delapan bit, yang dialamati secara tidak langsung melalui R0 dan register 1.
#Data = Yang diisikan ke dalam instruksi adalah 8 bit #Data 16 = Yang diisikan kedalam instruksi adalah 16 bit.
Addr 16 = Untuk tujuan alamat 16 bit. Digunakan pada operasi LCALL dan LJMP yang dapat dilakukan dimana saja dlam 64 Kbyte daerah alamat program memori.
Add.11 = 11 bit alamat tujuan dipakai oleh operasi CALL dan AJMP percabangan dapat dilakukan dimana saja dalam 2 Kbyte daerah program.
Remote control dibagi menjadi 3 menurut jenis pengkodeannya : 1. Pulses Coded
Jenis ini mengatur panjang pulsanya, sehingga pulsanya di variasi untuk menunjukkan data itu berlogik high atau low. Yang dijadikan variasi adalah pulsa highnya. Metode ini dipakai oleh remote sony
Gambar 2.4 Pulses Coded
2. Space Coded
Metode ini juga mengatur panjang pulsanya untuk menunjukkan data tersebut berlogik low atau high. Tetapi yang diatur adalah lebar pulsa lownya. Jenis ini diterapkan oleh remote Panasonic.
Gambar 2.5. Space Coded
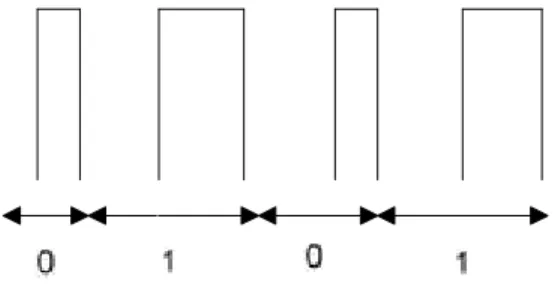
3. Shift Coded
Metode ini yang paling berbeda diantara kedua metode diatas .Metode ini menggunakan prinsip perbedaan fase untuk menunjukkan data yang dikirim
xxix
berlogik low atau high. Metode pengiriman data ini diterapkan oleh remote Philips.
0 1 0
Gambar 2.6. Shift Coded
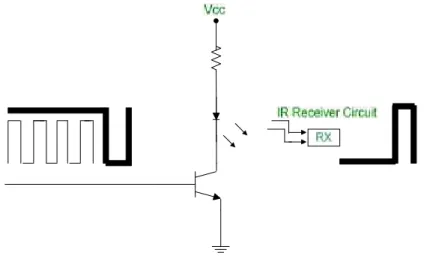
Penggunaan infra red sangat bagus dalam komunikasi dan control suatu sistem. Infra red adalah frekuensi radiasi yang bekerja di bawah tingkat sensitivitas mata manusia.Jadi manusia tidak dapat melihat sinar tersebut. Gambaran sinyal yang dikirimkan oleh transmitter dan diterima oleh IR demodulator dapat dilihat pada gambar 2.7 sebagai contoh yang dikirimkan oleh header.
Jika transmitter mengirimkan sinyal on dan off maka pada receiver juga menerima sinyal on dan off. Tetapi receiver hanya mendeteksi ada carrier atau tidak. Jika ada data carrier maka pulsa yang dikirimkan adalah high sebaliknya jika tidak ada carrier
Maka pulsa yang dikirimkan adalah low.Sinyal carier sebesar 40 Khz yang diterima oleh receiver akan hilang karena pada receiver sudah dibatasi dengan menggunakan rangkaian high pass filter dan low pass filter , frekuensi yang kurang dari 159,23 Hz dan lebih dari 7,24 kHz tidak dilewatkan .Sedangkan sinyal informasi sebesar 4T=2200μs (1.82kHz) akan diterima untuk diolah sebagai data header . salah satu contoh aplikasi dari penggunaan infrared adalah pada TV/VCR remote control. Infra red ini bekerja pada range frekuensi antar
30-60 KHz . Pada
dasarnya , data dikirimkan oleh suatu remote disertai dengan carriernya hal ini dimaksudkan supaya data dapat ditransmisikan untuk mencapai jarak yang lebih jauh , pada remote control sony ditumpangkan pada carrier sebesar 40kHz sehingga sebetulnya didalam pulsa high tersebut terdapat pulsa-pulsa kecil dengan frekuensi yang lebih tinggi. Dengan melihat karakteristik ini maka remote control menggunakan frekuensi carrier sekitar 36-40kHz.
Untuk membangkitkan sinyal dengan frekuensi 40kHz tidak sulit tetapi untuk menerima sinyal dengan frekuensi 40kHz itu membutuhkan filters, penguatan sinyal dan menghasilkan sinyal carrier sehingga data yang diterima benar-benar valid. Remote yang digunakan dalam hal ini adalah remote TV sony. Format data dari remote sony terdiri dari 12 bits data. Data yang dikirimkan pertama kali
xxxi
adalah header selanjutnya baru data. Remote sony ini memiliki karakteristik yaitu memiliki periode (1T) = 550 μs dan carrier 40 kHz. Untuk remote sony memiliki header high 4T dan low 1 T, untuk logic 1 memiliki pilsa high sepanjang 2T dan low 1T, dan untuk logic 0 memiliki pulsa high 1T dan low 1T . Ini merupakan format aslinya sedangkan jika mengamati sinyal yang dikirimkan remote melalui IR modul kebalikannya karena pada IR modul ada inverternya. Berikut contoh bentuk gambar pulsa dari header , logic 1 dan logic 0 dari remote TV sony yang sebenarnya ( belum melalui gerbang inverter)
Gambar 2.8. Pulsa Remote Control Sony
Berikut ini adalah bentuk-bentuk sinyal dari remote sony setelah keluar dari output 7404 pada gambar ( setelah melalui gerbang inverter ).
Gambar 2.9. Format Sinyal Remote Control Sony
2.3. Motor DC
Motor merupakan mesin yang mengubah tegangan DC menjadi gerakan yang berupa putaran dari torsi motor.
Gambar 2.10. Prinsip Kerja Motor
Bila penghantar dibentuk seperti gambar diatas, maka gaya yang dihasilkan pada kedua sisi penghantar yang tegak lurus dengan arah medan magnet akan menghasilkan torsi yang menyebabkan penghantar berputar . dari gambar diatas terlihat bahwa penghantar tegak lurus terhadap medan magnet.
Ada tiga jenis motor DC yaitu wound-field , magnet-permanen , dan motor printed-circuit. Daya dari motor DC dari 0,02 sampai 100 hp dan cocok digunkkan dalam berbagai aplikasi termasuk robotic dan mesin CNC ( Computer Numerical Control ). Keuntungan dengan menggunakan motor DC yaitu menghasilkan tenagan putaran yang lebih pada saat kecepatan rendah dibandingkan saat kecepatan tinggi.
xxxiii
Hal ini terjadi sejak motor DC mampu mempercepat beban dengan cepat mulai dari saat berhenti. Dan juga motor DC mampu menghasilkan tenaga putaran yang membalik sehingga menjadi lambat motornya menjadi lambat motornya menjelang mendekati posisi sebenarnya. Tenaga putaran yang diteruskan/maju akan tinggi saat motor berhenti atau kecepatannya rendah. Kecepatan tenaga putaran dengan motor DC mampu mendekati letak yang diinginkan sehingga motor akan melambat bebannya dan mencegah untuk tidak melampaui batas.
Prinsip sederhana dari motor DC wound-field adalah sama prinsip dari motor DC konvensional. Motor ini diatur oleh tegangan dinamo. Sedangkan motor DC magnet permanent menggunakan magnet secara konstan sebagai sumber arus. Motor DC magnet permanent mempunyai beberapa keuntungan dibandingkan wound-field diantaranya yaitu peningkatan efisiensi, kecilnya ukuran,tenaga putaran yang tinggi dan rendahnya tenaga input.
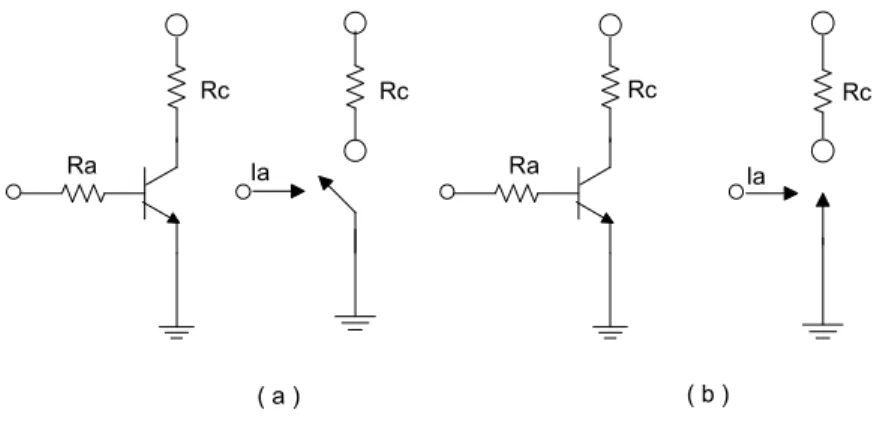
2.4. Transistor Sebagai Saklar
Transistor selain berfungsi sebagai penguatan dapat juga berfungsi sebagai saklar.Apabila transistor berfungsi sebagai saklar artinya transistor dioperasikan pada dua titik kerja yaitu daerah jenuh, maka resitansi antara kolektor dan emitter sangat kecil, maka transistor tersebut seperti sebuah saklar yang sedang menutup ( On ). Sedangkan apabila transistor dalam keadaan cut off, maka resistansi antara kolektor dan emitter sangat besar
, sehingga transistor bekerja sebagai sebuah saklar yang membuka ( Off ) . Rangkaiannya dapat dilihat pada gambar dibawah ini :
Ra Rc Ia Rc Ra Rc Ia ( a ) ( b ) Rc
Gambar 2.11 a. Transistor pada saat tidak menghantar b. Transistor pada saat menghantar
Saat transistor pada keadaan cut-off ( terbuka ) Vi= V0 = 0 Volt, I.R = 0 mA,
sehingga tidak ada arus yang mengalir melalui Rc kecuali arus bocor kolektor emitter. Selanjutnya tegangan Vin diberikan ke basis pada transistor, maka
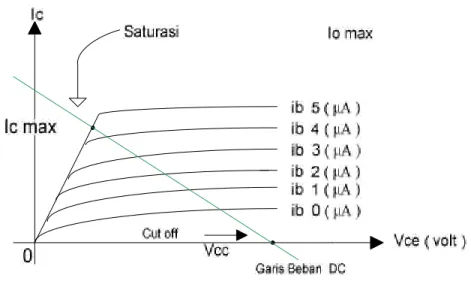
transistor akan menjadi hidup , maka besar arus basis dapat dihitung sebagai berikut : IB =VBB - VBE RB I C = VCC - VCE RC Dimana : I C = Arus kolektor ( A) IB =Arus Basis ( A )
xxxv
VBE =Tegangan antara basis dengan Emitter ( V )
VCC = Tegangan Sumber ( V )
Vce = Tegangan antara kolektor dan emitter ( V )
Gambar 2.12. Karakteristik transistor
2.5. Relay
Relay merupakan suatu perangkat yang menggunakan magnet listrik untuk mengendalikan seperangkat kontak. Fungsi utamanya adalah sebagai saklar yang mengatur penyambungan arus yang lebih besar dengan menggunakan arus masukan lebih kecil,sesuai dengan batas arus keluaran perangkat elektronik umumnya.
Susunan sederhana diperlihatkan pada gambar 2.13. dan terdiri atas kumparan kawat penghantar yang digulungkan pada former memutari teras magnet. Bila kumparan itu
dienergikan oleh arus , medan magnet yang dibangun menarik armatur ini dipakai melalui pengungkit, untuk membuka atau menutup kontak-kontak.
Beberapa susunan kontak yang umum dipakai , semuanya terisolasi secara listrik dari rangkaian kumparan :
1. Normal terbuka ( Normally Open , NO) : kontak-kontak tertutup bila relay diberi arus listrik.
2. Normal tertutup ( Noramally Close , NC ) : kontak-kontak terbuka bila dialiri arus listrik.
3. Tukar sambung ( Change Over, CO ) : relay ini mempunyai kontak tengah yang normalnya tertutup tetapi akan terbuka bila diberi arus listrik.
Gambar 2.13. Simbol Relay
a) Normally Open , b) Normally Close , c) Change Over
Relay-relay ini terdapat dalam dua jenis penggunaan arus , AC dan DC. Relay AC menggunakan daya jaringan listrik umum yaitu 220 Volt dan 110 Volt. Sedangkan relay DC menggunakan tegangan antar 5 Volt sampai 24 Volt dan membutuhkan arus kerja sekitar 100 mA.
xxxvii
Osilator adalah sebuah rangkaian elektronika yang dirancang untuk menghasilkan gaya gerak listrik bolak-balik dengan frekuensi dan bentuk gelombang yang diketahui.
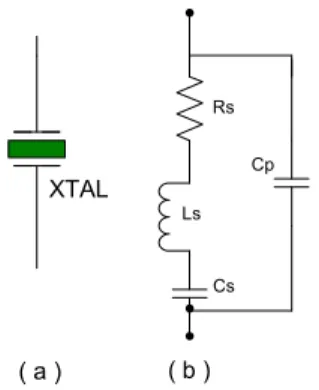
Rangkaian listrik ekivalen dari Kristal diperlihatkan pada gambar 2.14. Induktor L, kapasitas C, dan resistor R adalah analogi dari massa koefisien kepatuhan ( Coplane, yaitu kebalikan dari konstanta pegas ) dan faktor peredam.
XTAL Rs Ls Cs Cp ( a ) ( b )
Gambar 2.14. a) Simbol Osilator Kristal
b) Rangkaian ekivalen Osilator Kristal
2.7. Catu Daya
Rangkaian catu daya seperti gambar 2.15. di bangun dengan menggunakan sebuah komponen utama yaitu IC register 7805, IC ini berfungsi sebagai penstabil tegangan sehingga keluaran dari catu daya tetap stabil 5 V . Tegangan dari jala-jala akan disearahkan oleh penyearah tegangan dengan menggunakan 4 ( empat ) buah dioda , ditambah dioda bright , agar tegangan DC yang dihasilkan benar-benar rata-rata dengan mengandung ripple yang sangat kecil, untuk itu digunakanlah sebuah kapasitor yang
bernilai 10 μF sebagai filter dan untuk menguatkan arus yang lemah pada rangkaian catu daya.