PENGARUH GERAKAN TRANSDUCER TERHADAP KUALITAS
SINYAL AKUSTIK BAWAH AIR DENGAN PENDEKATAN
SIMULASI
I Putu Andhi Indira Kusuma1, Maria Margareta Z.B2
1,2
Jurusan Teknik Perkapalan, Institut Teknologi Adhi Tama Surabaya Email:[email protected]
Abstrak
Pada proses transmisi sinyal akustik bawah air di perairan dangkal yang bergelombang akan mengakibatkan pergerakan transducer yang secara tidak langsung akan meningkatkan gangguan pada proses transmisi sinyal. Makalah ini menganalisa pengaruh pergerakan transducer terhadap kualitas sinyal komunikasi akustik bawah air dengan pendekatan simulasi serta menerapkan metode passive time reversal mirror (PTRM) sebagai metode pemrosesan sinyal untuk meminimalisir pengaruh multipath effect dan meningkatkan kualitas sinyal. Pemodelan metode image digunakan untuk memodelkan kanal beserta interaksi sinyal yang terjadi saat proses transimisi. Dimana, tanki uji tarik kapal digunakan sebagai kanal atau media transmisi sinyal komunikasi akustik. Tiga jarak komunikasi antara sumber dan penerima sinyal disimulasikan kedalam pemodelan dengan mentransimisikan sinyal akustik Binary Phase Shift Keying (BPSK) sebesar 10 kHz dan membawa 100 bits simbol transmisi dengan waktu transmisi selama 0.02 s. Kemudian tiga variasi nilai sigma () 2.5 cm, 5 cm dan 10 cm diberikan sebagai representasi gerakan osilasi dari transducer dengan sebaran Gaussian. Dari hasil pemodelan didapatkan bahwa semakin jauh jarak komunikasi maka nilai bit error akan meningkat. Kemudian semakin besar pergerakan transducer atau nilai sigma () maka semakin acak waktu kedatangan pada setiap elemen ray di masing-masing respon impulse dari kanal sehingga nilai bit error akan meningkat pula. Dengan menerapkan serta mengaplikasikan metode passive time reversal maka bit error dapat diminimalisir sehingga dapat meningkatkan kualitas sinyal akustik yang diterima.. Dalam hal ini metode passive time reversal efektif untuk mengurangi pengaruh yang ditimbulkan oleh pergerakan transducer.
Kata Kunci: Komunikasi akustik bawah air, Multipath effect, Passive time reversal
Abstract
In the process of transmitting underwater acoustic signals in shallow wavy waters will result in movement of the transducer which will increase the interference on the signal transmission process.. This paper analyzes the effect of transducer movement on the quality of underwater acoustic communications signal and apply passive time reversal mirror (PTRM) method as signal processing method to minimize multipath effect and improve signal quality. Image method is used to simulate the channel along with the signal interaction that occurs during the transmition process. Mini towing tank is used as a channel or transmission medium of an acoustic communication signal. Three communication distance between the source and the receiver signal is simulated into the model by transmitting a 10 kHz Binary Phase Shift Keying (BPSK) acoustic signal and carrying 100 bits of transmission symbol with transmission time of 0.02 s. Furthermore, three variation of sigma () value was given to represented the oscillation movement of transducer based on Gaussian deviation. The modeling results shows that, increasing the communication distance the bit error value will increase. Then, when the movement of the transducer increased () the more random the arrival time on each ray element in each channel impulse response. Furthermore, the bit error value will increase as well. By applying the passive time reversal method, the bit error can be minimized so as improved the quality of the acoustic signal. In other word, passive time reversal method is effective to reduce the effect caused by the transducer movement.
.
Keywords :Underwater Acoustic Communication, Multipath Effect, Passive Time Reversal
1. PENDAHULUAN
Komunikasi akustik bawah air merupakan suatu proses komunikasi yang dilakukan di kanal berupa perairan dengan mentransmisikan sinyal akustik melalui transmitter sebagai pengirim atau sumber sinyal serta receiver sebagai penerima sinyal. Sinyal akustik yang dibawa dapat berupa suara, data maupun gambar. Hal ini mengakibatkan komunikasi akustik bawah air telah banyak dikembangkan serta diaplikasikan ke berbagai bidang seperti
ilmu pengetahuan, eksplorasi, militer serta
pencegahan bahaya di laut [1]. Dibalik
perkembangannya yang begitu pesat,
komunikasi akustik bawah air menyimpan berbagai gangguan yang timbul saat proses komunikasi dilakukan. Beberapa permasalahan tersebut meliputi mekanisme transmisi sinyal, jenis sinyal yang digunakan beserta kapasitas tenaga yang dibutuhkan saat proses transmisi. Selain itu, karakteristik dari kanal juga dapat menimbulkan permasalahan seperti kondisi
dasar dan permukaan perairan (multipath),
keterbatasan bandwidth, salinitas, arus,
gelombang permukaan air, efek Doppler
akibat gelombang laut serta pergerakan transducer dll [2,3,4,5]. Kanal akustik bawah air terbagai kedalam tiga bagian yaitu laut dalam (Deep Water), kedalaman sedang (Medium) serta laut dangkal (Shallow Water). Masing-masing kanal memiliki karakteristik yang berbeda sehingga permasalahan yang ditimbulkan akan berbeda pula. Pada kondisi kanal perairan dangkal masalah utama yang timbul adalah berupa pantulan sinyal akustik dengan dasar serta permukaan perairan atau biasa disebut dengan multipath effect.
Untuk perairan dangkal dengan kondisi
perairan tenang (Pakeris) maka pantulan
sinyal akustik ke dasar serta permukaan akan menimbulkan multipath delay pada receiver [5,6]. Dimana hal ini berarti simbol maupun pesan yang kita transmisikan melalui kanal akan terganggu dan mengalami keterlambatan
dibagian penerima (receiver). Kemudian
apabila kondisi perairan disertai dengan
gelombang di permukaan serta pergerakan dari
transducer maka multipath effect akan
semakin bertambah besar dan Doppler effect akan timbul akibat dari pantulan sinyal akustik
terhadap gelombang permukan beserta
pergerakan transducer tersebut.
Dengan kompleksnya karakteristik dari kanal perairan dangkal ini maka beberapa penelitian membahas secara khusus masalah
tersebut dengan menggunakan simulasi
komunikasi akustik serta pemodelan kanal. Pemodelan kanal perairan dangkal beserta simulasi komunikasi akustik telah dilakukan pada penelitian terdahulu dimana hasil dari pemodelan menyimpulkan bahwa kanal yang dimodelkan memiliki tingkat multipath effect yang tinggi [6]. Sedangkan untuk kasus pergerakan transducer akibat dari pergerakan bouy pengikat transducer yang bergerak vertikal juga akan menghasilkan pertambahan tingkat multipath effect [7].
Pemodelan kanal dengan adanya
gelombang di permukaan perairan dangkal telah dilakukan oleh cho et al [8]. Dimana
hasil pemodelan menyimpulkan bahwa
pantulan sinyal akustik pada permukaan perairan akan menambah buruk kondisi
multipath effect dan akan tercipta penambahan
frekuensi sinyal yang mengakibatkan
timbulnya effect Doppler. Berdasarkan hal tersebut maka pada makalah ini akan membahas mengenai pemodelan kondisi kanal
perairan dangkal dengan memodelkan
interaksi sinyal akustik dengan batas
permukaan kanal dengan menggunakan
metode image. Kemudian pada pemodelan
dilakukan penambahan analisa terkait
pergerakan transducer sehingga diharapkan dapat mengetahui perilaku pantulan sinyal akustik dengan pergerakan transducer pada arah horisontal. Selain itu pada pemodelan ini
juga akan mengaplikasikan metode
pemrosesan sinyal yaitu Passive Time
Reversal Mirror (PTRM) dalam simulasi
komunikasi akustik untuk menghilangkan pengaruh multipath effect serta meningkatkan kualitas sinyal akustik yang diterima.
2. METODE
A. Teori Image
Image method merupakan suatu teori
matematis yang digunakan untuk
menggambarkan interaksi sinyal dengan kanal yang berdasarkan asas pantulan cermin. Dalam hal ini teori ini dapat digunakan apabila boundary atas dalam kategori lembut dan boundary bawah dengan kondisi keras.
Sehingga, permukaan dan dasar kanal
dipertimbangkan sebagai dua cermin. Ketika elemen ray dari sinyal menyentuh permukaan dan dasar kanal, kemudian secara tidak langsung akan membentuk bayangan pantulan yang berlawanan dengan sinyal awal. Dengan logika ini keseluruhan pantulan atau metode bayangan dari sinyal dapat dibuat dan dengan metode ini pula dapat menghasilkan teori matematis dari multipath effect dengan sangat mudah. [9,10].
Representasi skema dari kontribusi
pantulan pertama dari tiga image source, sehingga dapat diekspresikan secara matematis seperti rumus berikut
03 jkL 03 2 02 jkL 02 1 01 jkL L e ) ω , φ ( Rˆ L e ) ω , φ ( Rˆ L e ) ω ( A ) ω , z , r ( P 03 02 01 04 jkL 04 2 04 1 L e ) ω , φ ( Rˆ ) ω , φ ( Rˆ 04 (1)
Dimana A(ω) adalah amplitudo sinyal dan i = 1,2. Sehingga
R
ˆ
i adalah ) ω , θ ( Rˆ ω , φ 2 π Rˆ ) ω , φ ( Rˆi i i (2)Panjang dari empat lengan rays dapat dideskripsikan sebagai berikut
` ) z z ( r L 2 s 2 01 (3) 2 s 2 02 r (z z) L (4) 2 s 2 03 r (2D z z) L (5) 2 s 2 04 r (2D z z) L (6)
B. Teori Passive Time Reversal Mirror
Metode time reversal (TR) atau dalam domain frekuensi disebut phase conjugation
(PC) merupakan suatu metode pengolahan
sinyal yang digunakan untuk memfokuskan energi pada batasan yang diinginkan yang juga dapat digunakan sebagai mitigasi dari dispersi multipath dan gangguan antar symbol (Inter
symbol interference-ISI). Metode ini dapat
diklasifikasikan menjadi dua jenis yaitu active
time reversal (ATR) serta passive time reversal (PTR) [11].
Berikut ini merupakan skema pemrosesan sinyal dengan menggunakan metode passive
time reversal mirror (PTRM).
Gambar 1. Skema pemrosesan sinyal dengan menggunakan metode passive time reversal mirror
(PTRM)
C. Pemodelan Kanal Komunikasi Dengan
Pergerakan Transducer
Untuk memodelkan interaksi sinyal yang
ditrasnmisikan dengan kanal, maka pada
analisa image method dipertimbangkan
menggunakan 6 (enam) elemen ray yaitu
Direct path (DP) untuk sinyal yang menuju
langsung ke penerima (receiver), Surface path
(SP) untuk sinyal yang memantul ke
permukaan air, Bottom path (BTP) untuk sinyal yang memantul ke dasar kanal, Front
Path (FP) untuk sinyal yang memantul ke
bagian depan dinding, Back Path (BP) untuk sinyal yang memantul kebagian belakang dinding, dan yang terakhir adalah Left path
(LP) untuk sinyal yang memantul kebagian
sebelah kiri dinding. Sedangkan pantulan sinyal ke bagian sebelah kanan dinding tidak dipertimbangkan karena asumsi sinyal telah
melewati receiver sehingga kedatangan
sinyalnya tidak diperhitungkan. Sedangkan
untuk memodelkan pergerakan transducer
terdapat beberapa kondisi yang di
pertimbangkan yaitu :
1. Pergerakan transducer berosilasi ke arah
sumbu x (horisontal) dengan
mengasumsikan memiliki nilai random dengan sebaran Gaussian.
2. Perpindahan transducer dari gerakan osilasi di representasikan oleh nilai sigma (). Pada simulasi akan di analisa 3 variasi dari besar nilai sigma yaitu 2.5 cm, 5 cm dan 10 cm.
3. Deviasi gerakan osilasi transducer di tunjukkan dengan nilai jx melalui rumus
) 1 , 1 ( rand * σ 0 jx (7)
4. Jarak relatif transducer sumber setelah mengalami gerakan osilasi di tunjukkan
dengan nilai rx melalui rumus
jx sx mx
rx (8)
5. Untuk melihat variasi kedatangan dari sinyal setelah terkena pengaruh gerakan osilasi dari transducer maka sinyal di transmisikan sebanyak 10 kali pada pemodelan sehingga akan menghasilkan
10 respon impulse yang berbeda dalam satu nilai sigma ().
6. Jarak antara transducer sumber dan
penerima sinyal pada simulasi
divariasikan kedalam tiga jarak
komunikasi yaitu 2 m, 4 m , 6 m.
7. Ketinggian sumber dari dasar kanal adalah 0,5 m dan penerima 0,2 m.
8. Sinyal yang ditransmisikan didalam kanal adalah Binary Phase Shift Keying
(BPSK) sinyal dengan frekuensi sebesar
10 kHz dan membawa 100 bits simbol transmisi.
9. Sampel frekuensi yang digunakan adalah 200 kHz dengan waktu transmisi selama 0.02 s. Kecepatan suara didalam kanal diasumsikan sebesar 1500 m/s.
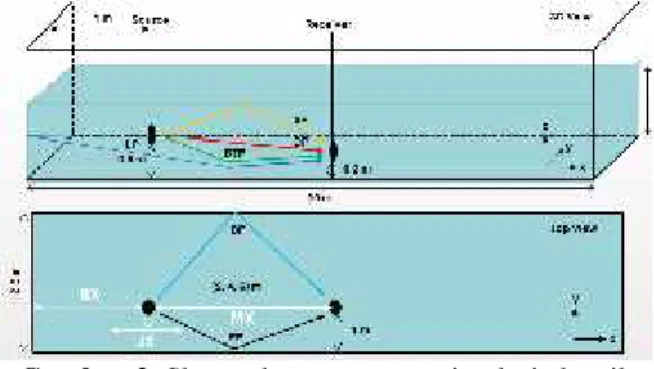
Untuk mendapatkan gambaran mengenai skema dan parameter simulasi akustik pada kanal mini towing tank milik Jurusan Teknik Perkapalan-ITATS, dapat dilihat pada gambar 3 di bawah. Pada gambar tersebut dapat di jelaskan bahwa transduser pengirim sinyal diasumsikan bergerak osilasi ke arah sumbu x
(horisontal). Gerakan ini merupakan
representasi dari keadaan sebenarnya saat meletakkan transduser menggunakan bouy atau alat apung lainnya sehingga jika terdapat
gerakan pada alat apung maka akan
mengakibatkan terjadinya gerakan random pada transduser baik gerakan ke arah vertikal maupun horizontal (sumbu x dan sumbu y). Pada makalah ini hanya membahas pengaruh gerakan transducer ke arah horisontal.
Gambar 2. Skema dan parameter simulasi akustik bawah air dengan transducer adanya pegaruh
pergerakan transducer pada pengirim sinyal
Tujuan dari pemodelan ini adalah untuk
menganalisa kualitas sinyal yang di
transmisikan ke dalam kanal terhadap
pengaruh gerakan dari transducer tersebut. Secara garis besar pada makalah ini hanya melihat pengaruh gerakan transducer terhadap kualitas sinyal pada domain waktu atau waktu kedatangan (Arrival time) pada masing-masing path yang dimodelkan dengan metode image.
3. HASIL DAN PEMBAHASAN
A. Analisa Respon Impulse Akibat Pengaruh
Gerakan Transducer
Analisa respon impulse dilakukan untuk melihat interaksi antara sinyal komunikasi dengan boundary yaitu lapisan dinding dari kanal. Dimana interaksi sinyal dengan
boundary pada domain waktu akan
mengakibatkan terjadinya time delay, atau keterlambatan datangnya sinyal berdasarkan fungsi waktu. Dengan adanya pergerakan dari transducer maka keterlambatan datang sinyal kemungkinan mengalami variasi kedatangan secara random. Hal ini di karenakan masing-masing elemen ray mendapatkan pengaruh gerakan osilasi dengan besar deviasi yang direpresentasikan oleh besar nilai sigma () sehingga akan mengakibatkan terjadinya variasi keterlambatan pada waktu kedatangan dari masing-masing elemen ray. Berikut ini
merupakan respon impulse dari
masing-masing jarak komunikasi dalam kondisi
normal tanpa adanya pergerakan transducer.
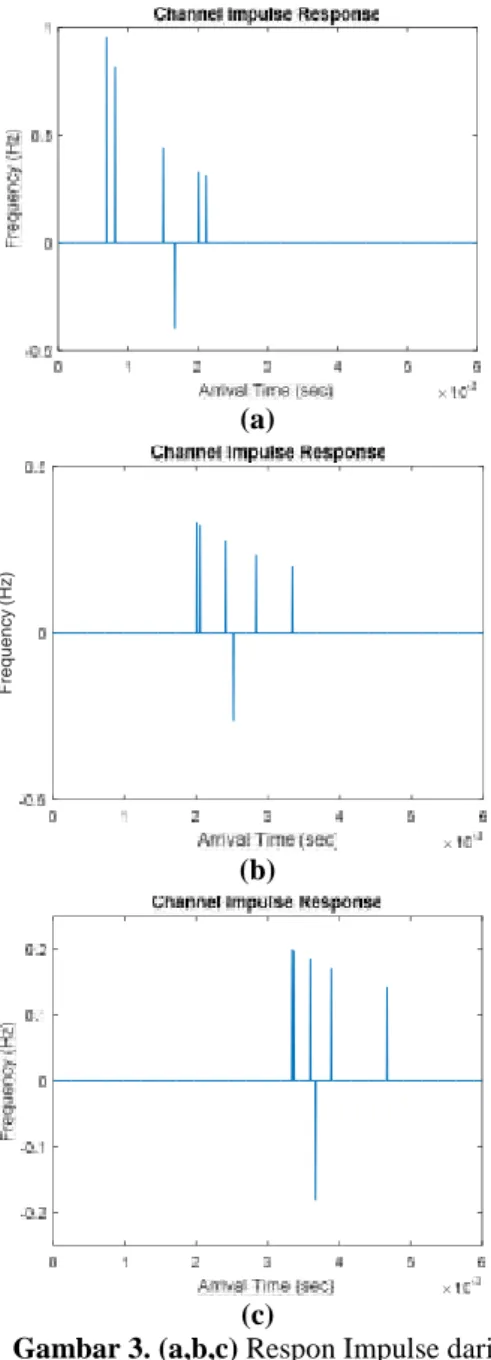
Pada gambar 3 (a,b,c) dapat
dideskripsikan bahwa 6 elemen ray yang di
modelkan dengan metode image
merepresentasikan interaksi atau pantulan antara sinyal yang di transmisikan ke dalam
kanal dengan boundary dari kanal. Di
karenakan adanya variasi jarak maka terjadi keterlambatan kedatangan pada ke-enam elemen ray tersebut pada respon impulse. Semakin jauh jarak komunikasi maka semakin lama waktu kedatangan dari elemen ray. Secara keseluruhan kedatangan elemen ray setelah berinteraksi dengan dinding kanal
adalah dimulai dengan kedatangan elemen ray dari direct path (DP), bottom path (BTP), front
path (FP), surface path (SP), left path (LP)
dan back path (BP). Dalam hal ini hasil dari pemodelan sesuai dengan teori dari metode image dimana surface path (SP) termasuk kedalam boundary atas dengan kategori
lembut (soft) ditunjukkan dengan nilai
frekuensi (-), sedangkan bottom path (BTP) termasuk kedalam boundary bawah dengan kategori keras (hard) ditunjukkan dengan nilai frekuensi (+). (a) F re q u e n c y (H z ) (b) (c)
Gambar 3. (a,b,c) Respon Impulse dari kanal komunikasi dalam kondisi normal tanpa pengaruh pergerakan transducer dengan jarak komunikasi 2 m, 4
m dan 6 m
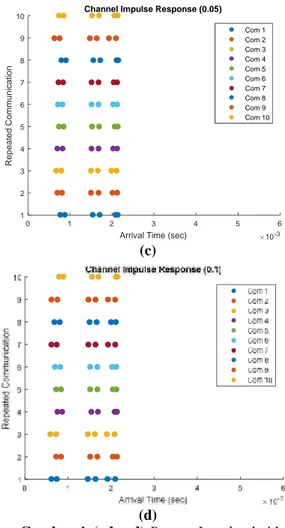
Untuk mengetahui seberapa besar
pengaruh dari pergerakan transducer dengan 3 variasi besar nilai (2.5 cm, 5 cm dan 10 cm) maka dalam proses simulasi, sinyal akan di transmikian sebanyak 10 kali (sampel) ke dalam kanal. Hasil dari transmisi sinyal tersebut akan di tunjukkan ke dalam grafik
respon impulse yang disusun sebanyak 10
buah respon impulse seperti yang ditunjukkan pada gambar 4 (a,b,c,d). Pada gambar 4 (a) menunjukkan kondisi respon impulse tanpa adanya pergerakan transducer atau nilai sigma () adalah nol. Hal ini bertujuan untuk dapat
membandingkan waktu kedatangan dari
masig-masing elemen ray saat kondisi normal serta setelah mengalami pergerakan.
(a)
Arrival Time (sec) 10-3 0 1 2 3 4 5 6 R e p e a te d C o m m u n ic a ti o n 1 2 3 4 5 6 7 8 9
10 Channel Impulse Response (0.05)
Com 1 Com 2 Com 3 Com 4 Com 5 Com 6 Com 7 Com 8 Com 9 Com 10 (c) (d)
Gambar 4. (a,b,c,d) Respon Impulse dari kanal komunikasi dengan jarak komunikasi 2 m dengan kondisi normal (a),= 2.5 cm (b),= 5 cm (c), dan
= 10 cm).
Gambar 4 diatas menunjukkan bahwa pada kondisi normal atau stationer (4a) respon
impulse dari 10 kali transmisi sinyal tidak
mengalami perubahan waktu kedatangan pada masing-masing elemen ray. Namun pada saat terkena pengaruh gerakan transducer (4b, 4c, dan 4d) elemen ray pada impulse respon mengalami variasi kedatangan di setiap trasnmisi sinyal akustik. Semakin besar nilai
sigma () maka semakin meningkat pula
variasi waktu kedatangan dari masing-masing
elemen ray pada respon impulse.
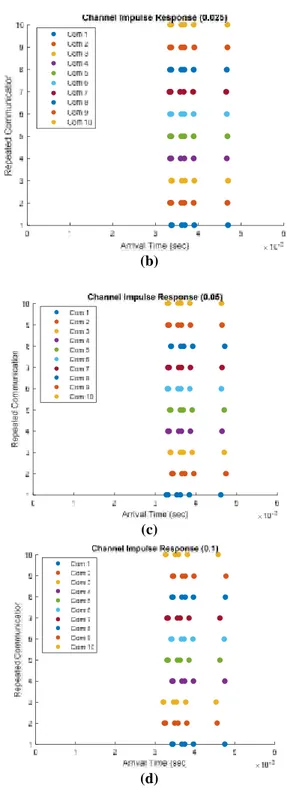
Dengan langkah yang hampir sama maka pada jarak komunikasi 4 dan 6 m juga akan di analisa terkait variasi waktu kedatangannya. Hasil dari simulasi tersebut di tunjukkan pada gambar 5 (a,b,c,d) dan 6 (a,b,c,d). Hasil simulasi dapat di simpulkan bahwa pada jarak
komunikasi 4 dan 6 m memiliki perilaku yang hampir sama dengan analisa respon impluse pada jarak 2 m yaitu di mana pada kondisi normal atau stationer tidak mengalami variasi waktu kedatangan pada elemen ray di masing-masing respon impulse dari kanal. Selain itu semakin besar nilai dari pergerakan transducer atau nilai sigma () dengan jarak komunikasi maka semakin meningkat pula variasi waktu kedatangan dari masing-masing elemen ray
pada respon impulse. Sehingga waktu
kedatangan semakin acak jika nilai sigma () yang diberikan meningkat. Dengan adanya fenomena ini maka perlu dilakukan analisa Bit
Error Rate (BER) untuk melihat seberapa
besar pengaruh waktu kedatangan yang acak pada masing-masing elemen ray disetiap respon impulse kanal dengan sinyal akustik yang di terima pada transducer penerima.
(a)
R e p e a te d C o m m u n ic a ti o n (c) (d)
Gambar 5. (a,b,c,d) Respon Impulse dari kanal komunikasi dengan jarak komunikasi 4 m dengan kondisi normal (a),= 2.5 cm (b),= 5 cm (c), dan
= 10 cm).
(a)
(b)
(c)
(d)
Gambar 6. (a,b,c,d) Respon Impulse dari kanal komunikasi dengan jarak komunikasi 6 m dengan kondisi normal (a),= 2.5 cm (b),= 5 cm (c), dan
= 10 cm).
B. Analisa Komunikasi Akustik
Setelah mengetahui fenomena yang terjadi
akibat gerakan transducer pada respon
impulse maka perlu dianalisa juga seberapa
kualitas sinyal akustik yang ditransmisikan kedalam kanal. Dengan jumlah symbol/bits sebanyak 100 bits yang di transmiksikan pada masing-masing waktu transmisi maka akan di analisa seberapa besar jumlah bit error yang terjadi. Dalam analisa ini akan di tinjau bit
error yang terjadi pada masing-masing jarak
komunikasi beserta masing-masing nilai sigma (2.5 cm, 5 cm dan 10 cm). Setelah itu akan dibandingkan pula jumlah bit error antara tidak menggunakan metode time reversal serta menggunakan time reversal. Hasil simulasi yang didapat kemudian dirangkum kedalam tabel perbandingan bit error rate berikut ini.
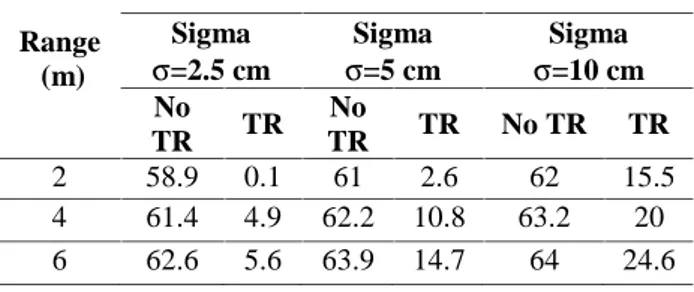
Tabel 1. Perbandingan nilai bit error yang terjadi pada masing-masing jarak komunikasi dan nilai sigma antara
menggunakan metode passive time reversal dengan tidak menggunakan metode passive time reversal
Range (m)
Bit Error Rate (BER) %
Sigma =2.5 cm Sigma =5 cm Sigma =10 cm No TR TR No TR TR No TR TR 2 58.9 0.1 61 2.6 62 15.5 4 61.4 4.9 62.2 10.8 63.2 20 6 62.6 5.6 63.9 14.7 64 24.6
Tabel 1 menunjukkan perbandingan nilai
bit error yang terjadi pada masing-masing
jarak komunikasi dan nilai sigma antara menggunakan metode passive time reversal dengan tidak menggunakan metode passive
time reversal. Terdapat beberapa poin yang
dapat dijabarkan melihat rekapitulasi hasil dari simulasi di atas yaitu pertama, semakin jauh jarak komunikasi maka semakin besar bit error yang dihasilkan. Hal ini terjadi disetiap nilai sigma serta dikondisi menggunakan metode
passive time reversal serta tidak menggunakan
metode tersebut. Kedua, bit error akan
semakin meningkat jika nilai sigma meningkat
dan terjadi pada masing-masing jarak
komunikasi. Ketiga, nilai bit error yang didapat jika menerapkan metode passive time
reversal lebih kecil jika dibandingkan dengan
hasil tanpa menggunaka metode passive time
reversal.
Secara garis besar dapat disimpulkan bahwa
metode passive time reversal dapat
meminimalisir nilai dari bit error yang terjadi sehingga kualitas sinyal akustik yang diterima dapat ditingkatkan apabila menerapkan metode tersebut. Namun perlu dilakukan analisa lebih
lanjut apakah metode tersebut dapat
meminimalisir terjadinya bit error saat kondisi
pergerakan transducer atau nilai sigma
semakin meningkat.
4. KESIMPULAN
Respon impulse dari kanal merupakan
gambaran kondisi dari kanal komunikasi. Semakin baik kita memahami kondisi kanal atau dengan kata lain semakin baik kita mendapatkan respon impulse kanal (Channel
impulse response) maka hasil komunikasi
yang diharapkan akan semakin baik pula. Dengan adanya pergerakan tranducer saat proses transmisi sinyal komunikasi di lakukan tentunya akan menambah kompleks masalah yang terjadi pada kanal baik itu dalam domain waktu maupun domain frekuensi. Berdasarkan hal tersebut makalah ini menyajikan analisa simulasi dari pengaruh pergerakan transducer terhadap hasil komunikasi dengan pendekatan model matematis ditinjau dari domain waktu. Beberapa analisa telah dilakukan yaitu tinjauan waktu kedatangan dari elemen ray pada respon impulse kanal dalam pengaruh gerakan osilasi dari transducer, variasi besar nilai gerakan osilasi yang direpresentasikan oleh nilai sigma (), serta pengaplikasian metode pemoresesan sinyal yaitu pasive time
reversal untuk meningkatkan kualitas
komunikasi sinyal akustik.
Hasil dari simulasi didapatkan bahwa semakin jauh jarak komunikasi maka nilai bit error akan meningkat. Kemudian semakin besar pergerakan transducer atau nilai sigma maka semakin acak waktu kedatangan pada setiap elemen ray di masing-masing respon impulse dari kanal. Hal ini secara tidak langsung akan meningkatkan nilai bit error pada sinyal akustik yang diterima di transducer
mengaplikasikan metode passive time reversal maka bit error dapat diminimalisir sehingga dapat meningkatkan kualitas sinyal akustik
yang diterima. Jika hasil bit error
dibandingkan dengan tanpa menerapkan
metode passive time reversal maka bit
errornya akan semakin besar. Dalam hal ini metode passive time reversal efektif untuk
mengurangi pengaruh dari efek yang
ditimbulkan oleh pergerakan transducer. Namun perlu dilakukan analisa lebih lanjut untuk mengetahui sejauh mana metode ini dapat mengatasi besarnya pengaruh dari pergerakan transducer. Kemudian dapatkah metode ini meminimalisir pengaruh yang diberikan oleh pergerakan transducer pada
domain frekuensi. Tentunya dengan
mengetahui perilaku dari pendekatan model
matematis dalam kondisi kanal yang
dipengaruhi oleh gangguan pada domain waktu ini dapat disimpulkan bahwa sebelum mentransmisikan sinyal akustik maka perlu dilakukan analisa respon impulse dari kanal untuk mengetahui besar gangguan yang terjadi yang kemudian dapat menerapkan metode pemrosesan sinyal yang paling efektif untuk meningkatkan kualitas komunikasi akustik bawah air.
UCAPAN TERIMA KASIH
Terimakasih kami ucapkan kepada Direktorat Riset dan Pengabdian Masyarakat, Direktorat Jendral Penguatan Riset dan Pengembangan, Kementrian Riset Teknologi dan Pendidikan
Tinggi beserta Lembaga Penelitian dan
Pengabdian Kepada Masyarakat (LPPM)
ITATS atas pembiayaan yang telah diberikan
untuk menyelesaikan makalah ini sesuai
dengan Kontrak Penelitian Tahun Anggaran 2018 nomor 16/KP/LPPM/ITATS/2018 untuk Program Penelitian Dosen Pemula. Makalah ini dapat terselesaikan dengan baik atas bantuan yang telah diberikan tersebut.
DAFTAR PUSTAKA
[1] Citree, M., Shahabudeen, S., Freitag, L., and Stojanovic, M., “Recent advances in
underwater acoustic communication &
networking,”Proceeding of IEEE-Oceans, pp.
1-10, 2008.
[2] Duke, P. S.,“Direct-sequence spread-spectrum modulation for utility packet transmission in underwater acoustic communication networks”, Master Thesis, Naval Post Gradute School, Monterey-California, 2002.
[3] Stojanovic, M., and Preisig, J., “Underwater acoustic communication channels: propagation models and statistical characterization”, Proceeding of IEEE Communication Magazine, pp. 84-89, 2002. [4] Aik, T. B., Sen, Q. S., and Nan, Z.,
“Characterization of Multipath Acoustic Channels in very shallow waters for communications”, Proceeding of Oceans 2006-Asia Pasific, Singapore, pp. 1-8, 2007. [5] Eggen, T. H.,” Underwater acoustic
communication over Doppler spread channels”, Ph.D Dissertation, Department of electrical Engineering and Ocean Engineering, Woods Hole Oceanographic Institution, Massachusetts–USA, 1997.
[6] Kusuma, I.P.A.I, “Aplikasi Metode Passive Time Reversal Mirror Untuk Mengurangi Pengaruh Multipath Pada Komunikasi Akustik Bawah Air”, Jurnal Inovtek Polbeng, Vol.07,
No. 1, Juni, 2017.
[7] Citree, M., “A high frequency warm shallow water acoustic communications channel model and measurements”, Journal of Acoustical Society of America, Vol. 122, pp. 25-80, 2007.
[8] Choo, y., and Seong, W., ‘’ Analysis of
acoustic channels with a time evolving
surface”,Applied Acoustic, Vol. 78, pp. 28-32,
2014.
[9] Frisk, G. V., , (1994). Ocean and Seabed Acoustics: A theory of wave propagation, Prentice Hall, New Jersey, USA.
[10] Zielinski, A., Yoon, Y. H., and Wu, L.,
“Performance analysis of digital acoustic communication in a shallow water channel,”
Oceanic Engineering, Vol. 20, No. 4, pp. 293-299, 1995.
[11] Wu, B. H, Too, G. P, and Lee, S., “Audio signal separation via a combination procedure of time-reversal and deconvolution process,”
Mechanical Systems and Signal Processing, Vol. 24, pp. 1431-1443, 2010.