Pada dasarnya sistem kaki adalah gerakan roda yang didesain sedemikian rupa hingga memiliki kemampuan gerak seperti makhluk hidup. Robot berjalan dengan sistem kaki dua kaki atau biped robot, memiliki struktur kaki seperti manusia dan setidak-tidaknya memiliki sendi-sendi yang mewakili pergelangan kaki, lutut dan pinggul. Dalam konfigurasi yang ideal, pergerakan pada pinggul dapat terdiri dari multi DOF dengan kemampuan gerak memutar seperti orang yang menari.
Demikian juga pada pergelangan kaki, idealnya adalah juga memiliki kemampuan gerakan polar. Untuk robot binatang (animatoid) seperti serangga, jumlah kaki dapat didesain lebih dari empat. Bahkan robot ular dapat memiliki DOF lebih dari 8 sesuai dengan panjang robot yang didefinisikan. Sistem kaki yang dipergunakan pada robot ditunjukan pada gambar berikut:
Continue Reading
1 komentar:
Sistem Roda
▸ Baca selengkapnya: bagaimana cara melakukan gerakan lengan dengan posisi kaki mengapit pelampung
(2)Sistem penggerak roda merupakan sistem mekanik yang dapat menggerakan robot untuk berpindah posisi. Terdiri dari sedikitnya sebuah roda penggerak ( drive dan steer), dua roda differensial (kiri dan kanan independen ataupun sistem belt seperti tank), tiga roda (syncro drive atau sistem holomonic), empat roda ( Ackerman model/car like mobile robot) ataupun lebih.
Continue Reading
0 komentar:
Aktuator Robot
Diposkan oleh Harippudin
Continue Reading
0 komentar:
Sensor Pada Robot
Diposkan oleh Harippudin
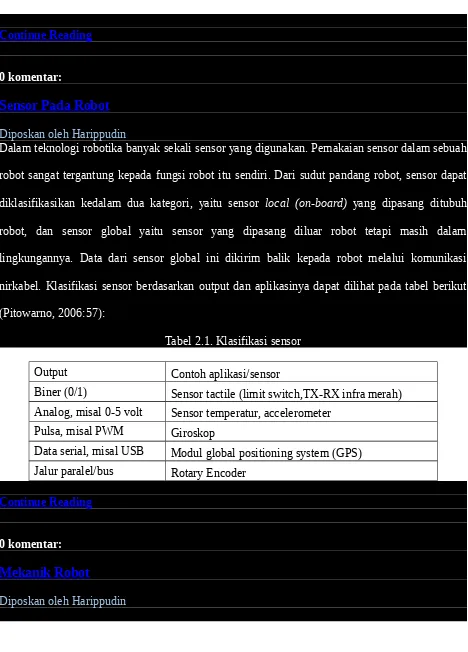
Dalam teknologi robotika banyak sekali sensor yang digunakan. Pemakaian sensor dalam sebuah robot sangat tergantung kepada fungsi robot itu sendiri. Dari sudut pandang robot, sensor dapat diklasifikasikan kedalam dua kategori, yaitu sensor local (on-board) yang dipasang ditubuh robot, dan sensor global yaitu sensor yang dipasang diluar robot tetapi masih dalam lingkungannya. Data dari sensor global ini dikirim balik kepada robot melalui komunikasi nirkabel. Klasifikasi sensor berdasarkan output dan aplikasinya dapat dilihat pada tabel berikut (Pitowarno, 2006:57):
Tabel 2.1. Klasifikasi sensor
Output Contoh aplikasi/sensor
Biner (0/1) Sensor tactile (limit switch,TX-RX infra merah) Analog, misal 0-5 volt Sensor temperatur, accelerometer
Pulsa, misal PWM Giroskop
Data serial, misal USB Modul global positioning system (GPS) Jalur paralel/bus Rotary Encoder
Continue Reading
0 komentar:
Mekanik Robot
Struktur robot sebagian besar dibangun berdasarkan konstruksi mekanik. Sistem mekanik dapat terdiri dari setidak-tidaknya sebuah fungsi gerak. Jumlah fungsi gerak disebut sebagai derajat kebebasan atau degree of freedom (DOF). Sebuah sendi yang diwakili oleh sebuah gerak actuator disebut sebagai satu DOF. Robot dengan kemampuan navigasi dan manipulasi memiliki konstruksi yang lebih rumit dan disbanding dengan kemampuan navigasi saja.
Hal mendasar yang perlu diperhatikan dalam mendesain mekanik robot adalah kebutuhan torsi untuk menggerakan sendi atau roda. Kebanyakan gerakan yang diperlukan pada sisi anggota badan adalah relatif pelan namun bertenaga. Untuk itu diperlukan cara-cara transmisi daya motor (actuator secara umum) yang tepat. Salah satu cara yang paling umum digunakan adalah dengan menggunakan perbandingan roda gigi pada transmisi. Pada motor-motor tertentu biasanya sudah dilengkapi dengan gear box sehingga dapat meningkatkan torsi motor.
Continue Reading
0 komentar:
Sistem Kontrol Robot
Diposkan oleh Harippudin
Selasa, 02 Februari 2010
Sistem kontroler merupakan suatu sistem elektronik yang berfungsi sebagai pengendali sistem mekanik. Suatu sistem control dapat berkerja secara otomatis ataupun secara manual.
Sistem Kontrol Manual
bertindak untuk membuka atau menutup katup sebagai aktuator guna mempertahankan keadaan permukaan yang diinginkan.
Sistem kontrol manual berupa rangkaian elektronik yang mampu mengendalikan sistem mekanik tetapi masih menggunakan kendali manusia. Dalam hal ini terdapat interaksi manusia dengan robot. Pada keaadaan ini terdapat tiga tingkatan interaksi antara manusia dengan robot yaitu (Pitowarno, 2006:35):
• Manusia sebagai konteroler robot sepenuhnya • Manusia sebagai manager dari operasi robot • Manusia dan robot berada dalam kesetaraan.
Dengan campur tangan manusia maka pergerakan robot dapat langsung dideteksi secara visual melalui penglihatan mata. Sensor berupa perangkat keras yang diperlukan mungkin hanya berupa switch pembatas (limit switch) untuk menghindari bahaya diluar control. Cara ini dikenal sebagai pengendalian robot menggunakan remote control, baik secara wireless ( tanpa kabel) maupun menggunakan kabel. Pada panel control yang dipegang oleh operator terdapat tombol-tombol untuk mengontrol seluruh pergerakan sendi robot. Robot jenis remote control ini banyak digunakan untuk tugas yang sangat rumit, yang jika dibuat secara otomatis terlalu banyak kendala yang dihadapi.
Contoh klasik dalam bentuk permainan misalnya robot manual yang dikompetisikan dalam ajang kontes robot (Robocon). Spesifikasi dari robot menunjukan bahwa robot dikontrol sepenuhnya oleh manusia sebagai operator.
Sistem Kontrol Otomatis
Sistem pengendalian dimana faktor manusia tidak dominan dalam aksi pengendalian yang dilakukan pada sistem tersebut. Peran manusia digantikan oleh sistem kontroler yang telah diprogram secara otomatis sesuai fungsinya, sehingga bisa memerankan seperti yang dilakukan manusia. Di dunia industri modern banyak sekali sistem kendali yang memanfaatkan kontrol otomatis, apalagi untuk industri yang bergerak pada bidang yang prosesnya membahayakan keselamatan jiwa manusia.
Continue Reading
0 komentar:
Kontrol Kecepatan Motor Dengan PWM (Pulse Width Modulation)
Diposkan oleh Harippudin
Pada motor DC berlaku persamaan, V = E+I a Ra
Ф E = C n n =E/C.Ф
Dari persamaan-persamaan diatas diadapat :
n = (V-Ra.Ra) / C.Ф
dengan:
n = Jumlah putaran (rpm)
V = tegangan jepit (V)
Ra = Hambatan Jangkar (Ohm) C = Konstanta motor
Sehingga dengan memperhatikan persamaan tersebut, putaran motor akan dipengaruhi oleh tegangan motor, arus jangkar, tahanan jangkar dan medan magnet. Jika salah satu besaran diabuat variabel dengan besaran lain tetap maka banyaknya putaran akan sebanding dengan besarnya besaran tersebut.
Dengan demikian jika tegangan dibuat variabel dan besaran lainya dibuat tetap maka, besarnya tegangan akan berbanding lurus dengan kecepatan putaran. Untuk mendapatkan putaran rendah diberi tegangan rendah dan untuk mendapatkan putaran tinggi tegangan harus tinggi. Dengan demikian, masalah yang harus diselesaikan pada rangkaian pengemudi motor adalah bagaimana membuat tegangan output dapat bervariasi (dapat diatur mulai dai 0 Volt hingga tegangan maksimum secara linier).
Secara teori, spesifikasi ini dapat diperoleh dengan memanfaatkan rangkaian penguat transistor yang tegangan/arus basisnya dapat diatur untuk mendapatkan tegangan kolektor yang variatif. Akan tetapi, cara ini tidak disarankan, karena dapat menimbulkan panas yang berlebihan pada transistor. Hal ini disebabkan transistor bekerja pada daerah linier sehingga disipasi daya berupa panas yang setara dengan basil perkalian arus kolektor dengan resistansi kolektor emitor adalah relatif besar.
Pulse Width Modulation (PWM) adalah suatu teknik manipulasi dalam pengemudian motor (atau perangkat elektronik berarus besar lainnya) yang menggunakan prinsip cut-off dan saturasi. Transistor atau komponen switching didisain bekerja dengan karakteristik mirip, "linier" namun sebenarnya menggunakan teknik ON-OFF.
Dengan melihat gambar diatas maka besar tegangan rata-rata akan sama dengan, Vavr = ( Ton / (Ton + Toff) ) x Vm
Atau jika dalam persen akan sama dengan, Vavr = ( Ton / (Ton + Toff) ) x 100 %
Dengan :
Vavr = Tegangan rata-rata
Ton = Pulsa logika tinggi (T2-T1)
Toff = Pulsa logika rendah (T3-T2)
Vm = Tegangan puncak
Sehingga dengan melakukan pengaturan lebar pulsa dalam teknik PWM maka besar tegangan rata-rata pun dapat diatur yang pada akhirnya juga akan merubah kecepatan putaran motor.
Continue Reading
1 komentar:
Posting Lama
Mengenai Saya
Harippudin
Cirebon, Jawa Barat, Indonesia
pengalaman: Kuliah Kerja Nyata (KKN) “pendidikan Lingkungan Hidup” di Lembang Kab.Bandung, Prakerin di PT. Dirgantara Indonesia (PTDI) Bandung, Program
Pendampingan SMK di SMKN 1 Jamblang (2009). Kegiatan lainnya: Seminar Robotech-Elektrovaganza HME JPTE FPTK UPI, peserta sekaligus panitia dalam workshop mikrokontroller AVR untuk Pemograman Robot HME JPTE FPTK UPI (2007),
Instruktur pada pelatihan Basic Training Komunitas Mahasiswa Penggemar Otomasi dan Robotika, peserta Pelatihan Robotika Kontes Robot Indonesia (KRI) & Kontes Robot Cerdas Indonesia (KRCI) yang diselenggarakan oleh DIKTI pada tahun 2008 di Bandung. Prestasi yang diraih yaitu sebagai Juara III dalam Kontes Robot Indonesia (KRI) tingkat regional di UI(2009) dan Juara III dalam Kontes Robot Indonesia (KRI) tingkat nasional di UGM(2009).
Lihat profil lengkapku
susunan robot SHIRARU pada KRI 2009
Subscribe To
Pos
Semua Komentar
Followers
Blog Archive
▼ 2010 (10)
o ▼ Februari (7)
Sistem Kaki
Sistem Roda
Aktuator Robot
Sensor Pada Robot
Mekanik Robot
Sistem Kontrol Robot
Kontrol Kecepatan Motor Dengan PWM (Pulse Width Mo...
o ► Januari (3)