BAB IV
PENGUJIAN DAN ANALISIS
Pada bab ini akan dibahas mengenai pengujian alat serta analisis dari hasil
pengujian. Tujuan dilakukan pengujian adalah mengetahui sejauh mana hasil perancangan alat yang telah dibahas pada Bab III serta mengetahui tingkat keberhasilan setiap spesifikasi yang telah diajukan.
4.1. Pengujian Sensor Accelerometer RAS-2
Hasil keluaran dari sensor accelerometer RAS-2 dikonversi menjadi nilai digital dengan resolusi 10 bit dan tegangan referensi 2,56V.
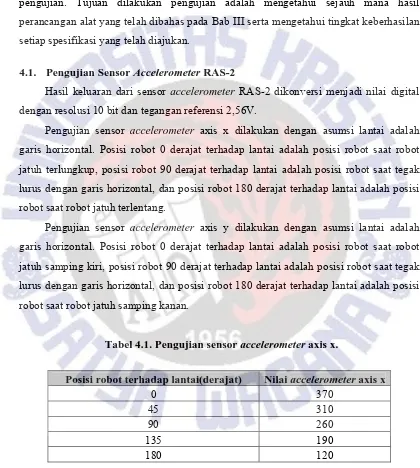
Pengujian sensor accelerometer axis x dilakukan dengan asumsi lantai adalah garis horizontal. Posisi robot 0 derajat terhadap lantai adalah posisi robot saat robot jatuh terlungkup, posisi robot 90 derajat terhadap lantai adalah posisi robot saat tegak lurus dengan garis horizontal, dan posisi robot 180 derajat terhadap lantai adalah posisi robot saat robot jatuh terlentang.
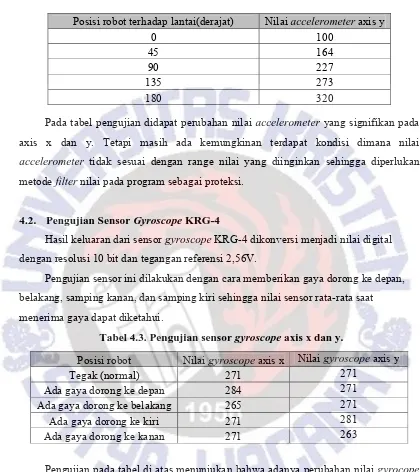
Pengujian sensor accelerometer axis y dilakukan dengan asumsi lantai adalah garis horizontal. Posisi robot 0 derajat terhadap lantai adalah posisi robot saat robot jatuh samping kiri, posisi robot 90 derajat terhadap lantai adalah posisi robot saat tegak lurus dengan garis horizontal, dan posisi robot 180 derajat terhadap lantai adalah posisi robot saat robot jatuh samping kanan.
Tabel 4.1. Pengujian sensor accelerometer axis x.
Posisi robot terhadap lantai(derajat) Nilai accelerometer axis x
0 370
45 310
90 260
135 190
Tabel 4.2. Pengujian sensor accelerometer axis y.
Pada tabel pengujian didapat perubahan nilai accelerometer yang signifikan pada axis x dan y. Tetapi masih ada kemungkinan terdapat kondisi dimana nilai
accelerometer tidak sesuai dengan range nilai yang diinginkan sehingga diperlukan metode filternilai pada program sebagai proteksi.
4.2. Pengujian Sensor Gyroscope KRG-4
Hasil keluaran dari sensor gyroscopeKRG-4 dikonversi menjadi nilai digital dengan resolusi 10 bit dan tegangan referensi 2,56V.
Pengujian sensor ini dilakukan dengan cara memberikan gaya dorong ke depan, belakang, samping kanan, dan samping kiri sehingga nilai sensor rata-rata saat menerima gaya dapat diketahui.
Tabel 4.3. Pengujian sensor gyroscope axis x dan y.
Pengujian pada tabel di atas menunjukan bahwa adanya perubahan nilai gyrocope
ketika robot diberi gaya dorong. Nilai-nilai inilah yang akan digunakan pada program untuk mengetahui posisi robot ketika akan terjatuh.
Ketika nilai gyroscope berada pada range nilai robot akan terjatuh ke depan atau ke belakang, maka jalannya program pada RCB-4 akan memberi perintah untuk mengubah offset servo pergelangan kaki robot sebesar -9 derajat ke belakang atau +9 derajat ke depan. Sehingga robot dapat mempertahankan posisi agar tetap stabil.
Posisi robot terhadap lantai(derajat) Nilai accelerometeraxis y
0 100
45 164
90 227
135 273
180 320
Posisi robot Nilai gyroscopeaxis x Nilai gyroscopeaxis y
Tegak (normal) 271 271
Ada gaya dorong ke depan 284 271
Ada gaya dorong ke belakang 265 271
Ada gaya dorong ke kiri 271 281
Ketika nilai gyroscope berada pada rangenilai robot akan terjatuh ke samping kiri atau ke samping kanan, maka jalannya program pada RCB-4 akan memberi perintah
untuk mengubah offset servo pergelangan kaki robot sebesar -9 derajat ke samping kanan atau +9 derajat ke samping kiri. Sehingga robot dapat mempertahankan posisi agar tetap stabil.
4.3. Pengujian Gerakan (Motion)
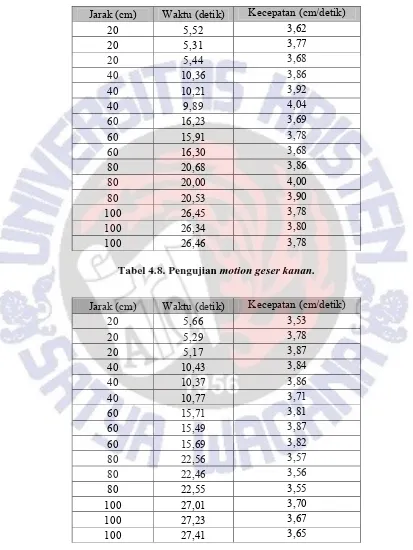
Pengujian motiondilakukan dengan cara mencatat waktu dan jarak tempuh robot saat bergerak sehingga diperoleh kecepatan gerak robot. Pada robot telah diprogram 30
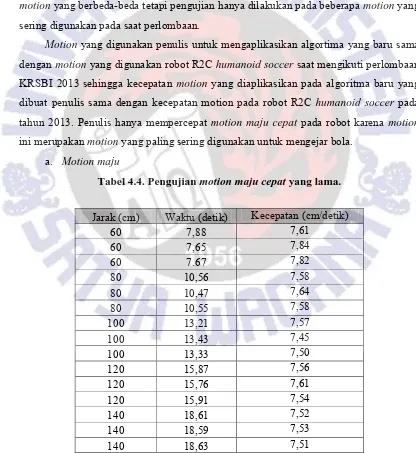
motion yang berbeda-beda tetapi pengujian hanya dilakukan pada beberapa motionyang sering digunakan pada saat perlombaan.
Motion yang digunakan penulis untuk mengaplikasikan algortima yang baru sama dengan motion yang digunakan robot R2C humanoid soccer saat mengikuti perlombaan KRSBI 2013 sehingga kecepatan motion yang diaplikasikan pada algoritma baru yang dibuat penulis sama dengan kecepatan motion pada robot R2C humanoid soccer pada tahun 2013. Penulis hanya mempercepat motion maju cepat pada robot karena motion
ini merupakan motion yang paling sering digunakan untuk mengejar bola. a. Motion maju
Tabel 4.4. Pengujian motion maju cepat yang lama.
Jarak (cm) Waktu (detik) Kecepatan (cm/detik)
60 7,88 7,61
60 7,65 7,84
60 7.67 7,82
80 10,56 7,58
80 10,47 7,64
80 10,55 7,58
100 13,21 7,57
100 13,43 7,45
100 13,33 7,50
120 15,87 7,56
120 15,76 7,61
120 15,91 7,54
140 18,61 7,52
140 18,59 7,53
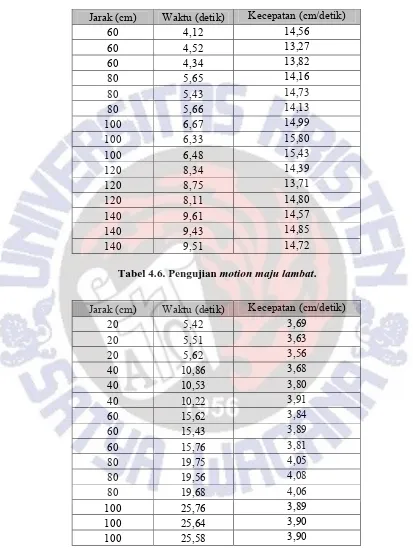
Tabel 4.5. Pengujian motion maju cepat yang baru.
Tabel 4.6. Pengujian motion maju lambat. Jarak (cm) Waktu (detik) Kecepatan (cm/detik)
60 4,12 14,56
60 4,52 13,27
60 4,34 13,82
80 5,65 14,16
80 5,43 14,73
80 5,66 14,13
100 6,67 14,99
100 6,33 15,80
100 6,48 15,43
120 8,34 14,39
120 8,75 13,71
120 8,11 14,80
140 9,61 14,57
140 9,43 14,85
140 9,51 14,72
Jarak (cm) Waktu (detik) Kecepatan (cm/detik)
20 5,42 3,69
20 5,51 3,63
20 5,62 3,56
40 10,86 3,68
40 10,53 3,80
40 10,22 3,91
60 15,62 3,84
60 15,43 3,89
60 15,76 3,81
80 19,75 4,05
80 19,56 4,08
80 19,68 4,06
100 25,76 3,89
100 25,64 3,90
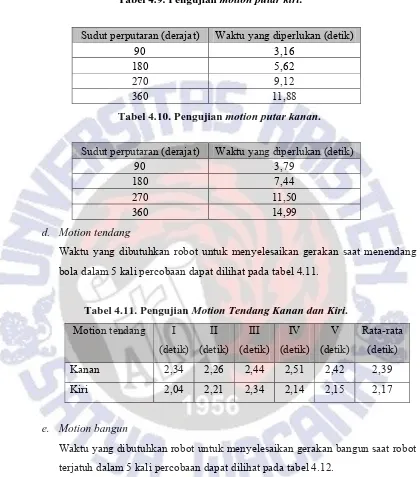
c. Motion putar
Tabel 4.9. Pengujian motion putar kiri.
Tabel 4.10. Pengujian motion putar kanan.
d. Motion tendang
Waktu yang dibutuhkan robot untuk menyelesaikan gerakan saat menendang bola dalam 5 kali percobaan dapat dilihat pada tabel 4.11.
Tabel 4.11. Pengujian Motion Tendang Kanan dan Kiri.
Motion tendang I
Kanan 2,34 2,26 2,44 2,51 2,42 2,39
Kiri 2,04 2,21 2,34 2,14 2,15 2,17
e. Motion bangun
Waktu yang dibutuhkan robot untuk menyelesaikan gerakan bangun saat robot terjatuh dalam 5 kali percobaan dapat dilihat pada tabel 4.12.
Tabel 4.12. Pengujian Motion Bangun Depan dan Belakang.
Motion Bangun I
Depan 3,21 3,20 3,25 3,45 3,51 3,32
Belakang 3,77 3,55 3,67 3,98 3,53 3,70
Sudut perputaran (derajat) Waktu yang diperlukan (detik)
90 3,16
180 5,62
270 9,12
360 11,88
Sudut perputaran (derajat) Waktu yang diperlukan (detik)
90 3,79
180 7,44
270 11,50
Dari tabel hasil pengujian beberapa motion di atas, dapat dilihat bahwa robot sudah dapat bergerak dengan lebih cepat. Pada tabel 4.4, kecepatan rata-rata robot saat
berjalan maju cepat dengan motion yang lama adalah 7,59 cm/detik sedangkan pada tabel 4.5, kecepatan rata-rata robot saat berjalan maju cepat dengan motion yang baru adalah 14,53 cm/detik. Dengan menggunakan motion maju cepat yang baru, robot dapat bergerak dengan lebih cepat dibandingkan dengan kecepatan robot saat menggunakan
motion maju cepat yang lama. Hanya saja penambahan kecepatan yang dilakukan oleh penulis belum dapat dimaksimalkan karena adanya faktor keterbatasan serial servo. Servo yang digunakan pada robot ini adalah serial servo tipe KRS-2552HV yang memiliki kecepatan gerak tanpa beban sebesar 0,14 s/60 derajat. Dengan adanya penambahan perangkat elektronik lain seperti smartphone, modul Bluetooth, dan sensor-sensor lainnya akan menambah berat dari robot. Semakin berat robot maka
pergerakan servo juga akan semakin lambat karena servo bekerja dengan beban yang berat. Penulis pernah melakukan percobaan untuk memaksimalkan kecepatan robot, tetapi servo-servo menjadi panas dan beberapa servo mengalami kerusakan.
Kerusakan servo yang sering kali terjadi disebabkan oleh motor dc yang menggerakan gear di dalam gear box motor servo terbakar. Motor dc yang digunakan oleh servo KRS-2552HV berukuran sangat kecil dengan torsi dan rpm yang relative
kecil sehingga ketika servo dipaksa untuk bergerak dengan beban yang berat, sangat besar kemungkinan terjadi kerusakan pada motor dc tersebut. Kerusakan motor dc dalam servo KRS-2552HV juga dapat menyebabkan kerusakan MOSFET yang menjadi
driver motor h bridge agar motor dc dapat bergerak CW dan CCW. Hal ini terjadi karena ketika motor dc terbakar, terjadi hubung singkat yang kemudian merusak MOSFET tersebut. Dengan pertimbangan dan percobaan yang telah dilakukan, penulis
mengambil keputusan untuk membuat gerakan robot tidak terlalu cepat tetapi memaksimalkan algoritma pada pergerakan robot sehingga dengan gerakan yang belum mencapai kecepatan maksimal, robot tetap dapat bergerak dengan cepat.
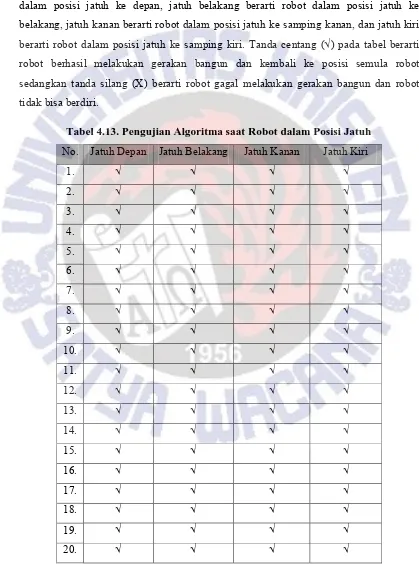
4.4. Pengujian Algoritma saat Robot dalam Posisi Jatuh
Penulis membuat sebuah algoritma baru dengan menggunakan sensor
accelerometer untuk mengetahui posisi robot ketika sedang jatuh sehingga robot dapat berdiri sendiri ketika jatuh. Algoritma ini dibuat karena robot R2C humanoid soccer
Pengujian algoritma saat robot jatuh dilakukan dengan cara menjatuhkan robot ke depan, belakang, samping kanan, dan samping kiri sehingga dapat dilihat apakah robot
berhasil melakukan gerakan bangun dari jatuh atau tidak ketika robot dalam posisi jatuh. Pada tabel pengujian 4.13 dapat dilihat pada kolom jatuh depan berarti robot dalam posisi jatuh ke depan, jatuh belakang berarti robot dalam posisi jatuh ke belakang, jatuh kanan berarti robot dalam posisi jatuh ke samping kanan, dan jatuh kiri berarti robot dalam posisi jatuh ke samping kiri. Tanda centang (√) pada tabel berarti
robot berhasil melakukan gerakan bangun dan kembali ke posisi semula robot sedangkan tanda silang (X) berarti robot gagal melakukan gerakan bangun dan robot tidak bisa berdiri.
Tabel 4.13. Pengujian Algoritma saat Robot dalam Posisi Jatuh
No. Jatuh Depan Jatuh Belakang Jatuh Kanan Jatuh Kiri
1. √ √ √ √
2. √ √ √ √
3. √ √ √ √
4. √ √ √ √
5. √ √ √ √
6. √ √ √ √
7. √ √ √ √
8. √ √ √ √
9. √ √ √ √
10. √ √ √ √
11. √ √ √ √
12. √ √ √ √
13. √ √ √ √
14. √ √ √ √
15. √ √ √ √
16. √ √ √ √
17. √ √ √ √
18. √ √ √ √
19. √ √ √ √
Pada tabel 4.13 dapat dilihat bahwa dari 20 pengujian, persentase keberhasilan robot untuk bangun dari jatuh mencapai 100%. Hal ini menunjukan bahwa algoritma
yang dibuat penulis saat robot dalam posisi jatuh dapat bekerja dengan baik. Pembacaan nilai accelerometer dan pembandingan nilai referensi yang dilakukan oleh mikrokontroler dapat bekerja dengan baik sehingga robot dapat mengetahui posisi saat robot jatuh dan mengeksekusi gerakan bangun ketika berada dalam posisi jatuh.
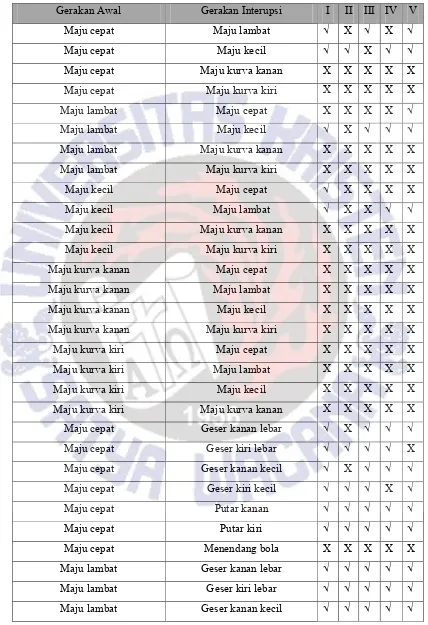
4.5. Pengujian Algoritma Pergerakan Robot
Penulis membuat sebuah algoritma baru yang dapat membuat robot tetap stabil saat robot melakukan proses pergantian gerakan dari gerakan satu ke gerakan yang lain tanpa adanya delay pada program. Dengan tidak adanya delay dalam program, maka sangat besar kemungkinan robot tidak stabil dan terjatuh pada fase transisi pergantian gerakan. Algoritma yang dibuat oleh penulis dapat mengatasi kejadian tersebut dengan
cara melakukan metode motion cutdengan pengecekan posisi kaki robot sehingga robot dapat mengetahui langkah kaki sebelumnya dan langkah kaki yang harus digerakan terlebih dahulu. Penulis juga memanfaatkan sensor gyroscope untuk mengatasi ketidakstabilan robot ketika dalam fase transisi pergantian gerakan tersebut.
Pengujian algoritma dilakukan dengan cara melihat apakah robot terjatuh atau
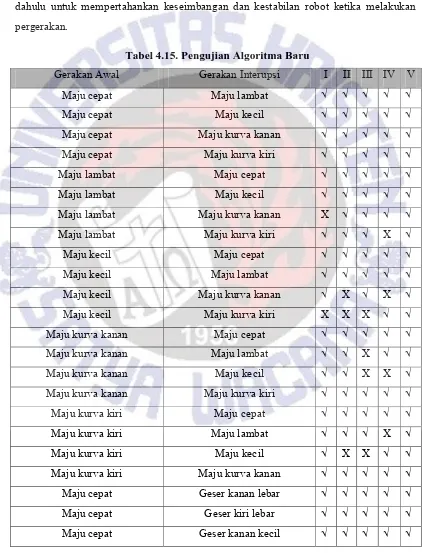
tidak ketika proses transisi pergantian gerakan dilakukan. Tabel 4.14 merupakan tabel pengujian dengan menggunakan algoritma yang lama (algoritma yang digunakan robot R2C pada KRSBI 2013) dan tabel 4.15 merupakan tabel pengujian dengan menggunakan algoritma baru yang dibuat oleh penulis. Pada tabel pengujian 4.14 dan 4.15 dapat dilihat bahwa pada kolom tabel Gerakan Awal merupakan gerakan robot yang dilakukan robot pertama kali. Kolom tabel Gerakan Interupsi merupakan gerakan
Tabel 4.14. Pengujian Algoritma Lama
Gerakan Awal Gerakan Interupsi I II III IV V
Maju cepat Maju lambat √ X √ X √
Maju cepat Maju kecil √ √ X √ √
Maju cepat Maju kurva kanan X X X X X
Maju cepat Maju kurva kiri X X X X X
Maju lambat Maju cepat X X X X √
Maju lambat Maju kecil √ X √ √ √
Maju lambat Maju kurva kanan X X X X X
Maju lambat Maju kurva kiri X X X X X
Maju kecil Maju cepat √ X X X X
Maju kecil Maju lambat √ X X √ √
Maju kecil Maju kurva kanan X X X X X
Maju kecil Maju kurva kiri X X X X X
Maju kurva kanan Maju cepat X X X X X
Maju kurva kanan Maju lambat X X X X X
Maju kurva kanan Maju kecil X X X X X
Maju kurva kanan Maju kurva kiri X X X X X
Maju kurva kiri Maju cepat X X X X X
Maju kurva kiri Maju lambat X X X X X
Maju kurva kiri Maju kecil X X X X X
Maju kurva kiri Maju kurva kanan X X X X X
Maju cepat Geser kanan lebar √ X √ √ √
Maju cepat Geser kiri lebar √ √ √ √ X
Maju cepat Geser kanan kecil √ X √ √ √
Maju cepat Geser kiri kecil √ √ √ X √
Maju cepat Putar kanan √ √ √ √ √
Maju cepat Putar kiri √ √ √ √ √
Maju cepat Menendang bola X X X X X
Maju lambat Geser kanan lebar √ √ √ √ √
Maju lambat Geser kiri lebar √ √ √ √ √
Maju lambat Geser kiri kecil √ √ √ √ √
Maju lambat Putar kanan √ √ √ √ √
Maju lambat Putar kiri √ √ √ √ √
Maju lambat Menendang bola X X X X X
Maju kecil Geser kanan lebar √ √ X √ √
Maju kecil Geser kiri lebar √ X √ √ √
Maju kecil Geser kanan kecil X √ √ X √
Maju kecil Geser kiri kecil √ √ X X √
Maju kecil Putar kanan √ √ √ √ √
Maju kecil Putar kiri √ √ √ √ √
Maju kecil Menendang bola X X X X X
Geser kanan lebar Geser kiri lebar √ √ √ √ √
Geser kanan lebar Geser kanan kecil √ √ X √ √
Geser kanan lebar Geser kiri kecil √ √ √ X X
Geser kanan lebar Putar kanan √ √ X √ √
Geser kanan lebar Putar kiri √ √ √ √ √
Geser kanan lebar Menendang bola X X X X X
Geser kiri lebar Geser kanan lebar √ √ √ √ √
Geser kiri lebar Geser kanan kecil √ X √ √ √
Geser kiri lebar Geser kiri kecil √ √ √ X √
Geser kiri lebar Putar kanan √ X X √ √
Geser kiri lebar Putar kiri √ √ X √ √
Geser kiri lebar Menendang bola X X X X X
Geser kanan kecil Geser kanan lebar √ √ √ √ √
Geser kanan kecil Geser kiri lebar √ √ X √ √
Geser kanan kecil Geser kiri kecil √ X √ √ √
Geser kanan kecil Putar kanan √ √ √ √ √
Geser kanan kecil Putar kiri √ √ √ √ √
Geser kanan kecil Menendang bola X X X X X
Geser kiri kecil Geser kanan lebar √ √ √ X √
Geser kiri kecil Geser kiri lebar √ √ √ √ √
Geser kiri kecil Putar kanan √ √ √ √ √
Geser kiri kecil Putar kiri √ √ √ √ √
Geser kiri kecil Menendang bola X X X X X
Putar kanan Geser kanan lebar √ √ √ √ √
Putar kanan Geser kiri lebar √ X √ √ √
Putar kanan Geser kanan kecil √ √ √ √ √
Putar kanan Geser kiri kecil √ √ √ X X
Putar kanan Putar kiri √ √ X √ √
Putar kanan Menendang bola X X X X X
Putar kiri Geser kanan lebar √ √ √ √ √
Putar kiri Geser kiri lebar √ X √ √ √
Putar kiri Geser kanan kecil √ √ √ √ √
Putar kiri Geser kiri kecil √ √ X √ √
Putar kiri Putar kanan √ √ √ √ √
Putar kiri Menendang bola X X X X X
Pada tabel pengujian 4.14 di atas, dapat dilihat bahwa persentase keberhasilan proses motion cut pada algoritma yang lama saat robot melakukan pergantian gerakan tanpa adanya delay dari program hanya 41%. Pengujian dilakukan dengan menggunakan gerakan-gerakan yang biasa digunakan ketika robot diprogram untuk bermain bola saat robot melakukan misi pada KRSBI (Kontes Robot Sepak Bola
Indonesia).
Kegagalan dalam melakukan motion cut pada algoritma yang lama sangat banyak terjadi. Hal ini disebabkan karena pada algoritma yang lama robot tidak dapat mengetahui posisi kaki robot dan robot tidak mengetahui langkah kaki awal yang harus dilakukan terlebih dahulu setelah proses motion cut dilakukan. Ketika robot tidak mengetahui posisi kakinya kemudian robot dipaksa untuk memotong gerakan sebelumnya dan diperintah untuk melakukan gerakan lainnya, maka kestabilan robot akan terganggu karena pergantian gerakan robot yang masih kacau.
Pada algoritma lama, robot dapat melakukan proses motion cut jika diberikan
sesudahnya, hanya saja delay waktu akan memakan waktu yang lama sehingga pergerakan robot menjadi lambat. Dengan algoritma baru yang dibuat oleh penulis,
robot dapat melakukan proses motion cut tanpa adanya delay waktu dalam program karena algoritma yang baru dapat mengetahui posisi kaki robot dan robot dapat mengambil keputusan untuk bergerak dengan awalan kaki kanan atau kiri terlebih dahulu untuk mempertahankan keseimbangan dan kestabilan robot ketika melakukan pergerakan.
Tabel 4.15. Pengujian Algoritma Baru
Gerakan Awal Gerakan Interupsi I II III IV V
Maju cepat Maju lambat √ √ √ √ √
Maju cepat Maju kecil √ √ √ √ √
Maju cepat Maju kurva kanan √ √ √ √ √
Maju cepat Maju kurva kiri √ √ √ √ √
Maju lambat Maju cepat √ √ √ √ √
Maju lambat Maju kecil √ √ √ √ √
Maju lambat Maju kurva kanan X √ √ √ √
Maju lambat Maju kurva kiri √ √ √ X √
Maju kecil Maju cepat √ √ √ √ √
Maju kecil Maju lambat √ √ √ √ √
Maju kecil Maju kurva kanan √ X √ X √
Maju kecil Maju kurva kiri X X X √ √
Maju kurva kanan Maju cepat √ √ √ √ √
Maju kurva kanan Maju lambat √ √ X √ √
Maju kurva kanan Maju kecil √ √ X X √
Maju kurva kanan Maju kurva kiri √ √ √ √ √
Maju kurva kiri Maju cepat √ √ √ √ √
Maju kurva kiri Maju lambat √ √ √ X √
Maju kurva kiri Maju kecil √ X X √ √
Maju kurva kiri Maju kurva kanan √ √ √ √ √
Maju cepat Geser kanan lebar √ √ √ √ √
Maju cepat Geser kiri lebar √ √ √ √ √
Maju cepat Geser kiri kecil √ √ √ √ √
Maju cepat Putar kanan √ √ √ √ √
Maju cepat Putar kiri √ √ √ √ √
Maju cepat Menendang bola √ √ √ √ √
Maju lambat Geser kanan lebar √ √ √ √ √
Maju lambat Geser kiri lebar √ √ √ √ √
Maju lambat Geser kanan kecil √ √ √ √ √
Maju lambat Geser kiri kecil √ √ √ √ √
Maju lambat Putar kanan √ √ √ √ √
Maju lambat Putar kiri √ √ √ √ √
Maju lambat Menendang bola √ √ √ √ √
Maju kecil Geser kanan lebar √ √ √ √ √
Maju kecil Geser kiri lebar √ √ √ √ √
Maju kecil Geser kanan kecil √ X √ X X
Maju kecil Geser kiri kecil √ X X √ √
Maju kecil Putar kanan √ √ √ √ √
Maju kecil Putar kiri √ √ √ √ √
Maju kecil Menendang bola √ √ √ √ √
Geser kanan lebar Geser kiri lebar √ √ √ √ √
Geser kanan lebar Geser kanan kecil √ √ √ √ √
Geser kanan lebar Geser kiri kecil √ √ √ √ √
Geser kanan lebar Putar kanan √ √ √ √ √
Geser kanan lebar Putar kiri √ √ √ √ √
Geser kanan lebar Menendang bola √ √ √ √ √
Geser kiri lebar Geser kanan lebar √ √ √ √ √
Geser kiri lebar Geser kanan kecil √ √ √ √ √
Geser kiri lebar Geser kiri kecil √ √ √ √ √
Geser kiri lebar Putar kanan √ √ √ √ √
Geser kiri lebar Putar kiri √ √ √ √ √
Geser kiri lebar Menendang bola √ √ √ √ √
Geser kanan kecil Geser kanan lebar √ √ √ √ √
Geser kanan kecil Geser kiri kecil √ √ √ √ √
Geser kanan kecil Putar kanan √ √ √ √ √
Geser kanan kecil Putar kiri √ √ √ √ √
Geser kanan kecil Menendang bola √ √ √ √ √
Geser kiri kecil Geser kanan lebar √ √ √ √ √
Geser kiri kecil Geser kiri lebar √ √ √ √ √
Geser kiri kecil Geser kanan kecil √ √ √ √ √
Geser kiri kecil Putar kanan √ √ √ √ √
Geser kiri kecil Putar kiri √ √ √ √ √
Geser kiri kecil Menendang bola √ √ √ √ √
Putar kanan Geser kanan lebar √ √ √ √ √
Putar kanan Geser kiri lebar √ √ √ √ √
Putar kanan Geser kanan kecil √ √ √ √ √
Putar kanan Geser kiri kecil √ √ √ √ √
Putar kanan Putar kiri √ √ √ √ √
Putar kanan Menendang bola √ √ √ √ √
Putar kiri Geser kanan lebar √ √ √ √ √
Putar kiri Geser kiri lebar √ √ √ √ √
Putar kiri Geser kanan kecil √ √ √ √ √
Putar kiri Geser kiri kecil √ √ √ √ √
Putar kiri Putar kanan √ √ √ √ √
Putar kiri Menendang bola √ √ √ √ √
Pada tabel pengujian 4.15 di atas, dapat dilihat bahwa keberhasilan proses motion cut pada algoritma yang baru saat robot melakukan pergantian gerakan tanpa adanya
delay dari program sudah mencapai 95,3%. Pengujian dilakukan dengan menggunakan gerakan-gerakan yang biasa digunakan ketika robot diprogram untuk bermain bola saat
robot melakukan misi pada KRSBI (Kontes Robot Sepak Bola Indonesia).
ketika robot melakukan gerakan maju kecil, langkah yang dilakukan robot sangat pelan dengan langkah yang kecil, sehingga ketika robot dipaksa untuk mengganti gerakan
menjadi maju kurva, sangat sulit untuk membuat robot tetap stabil dikarenakan perubahan kecepatan robot yang sangat cepat. Gerakan maju kurva sendiri yang dibuat penulis belum sempurna sebab penulis mengalami kesulitan mengatur kestabilan dari gerakan tersebut. Ketika robot bergerak maju kurva kanan, robot pasti akan lebih condong ke kanan dan membuat titik berat berada lebih ke bagian kanan sehingga
sangat besar kemungkinan robot untuk jatuh ketika melakukan proses motion cut, sama halnya ketika robot melakukan gerakan maju kurva kiri.
Kegagalan motion cut yang dilakukan robot juga banyak terjadi ketika robot melakukan proses motion cut di antara gerakan maju kecil ke geser kecil baik kanan maupun kiri. Kegagalan terjadi dikarenakan adanya ketidaksinkronan antara pengiriman
data dari smartphone dan waktu penerimaan data balikan dari RCB-4 yang dilakukan oleh mikrokontroler. Untuk melakukan gerakan maju kecil dan geser kecil hanya dibutuhkan waktu yang cepat karena langkah robot yang sangat kecil sedangkan pengiriman data atau perintah dari smartphone membutuhkan waktu yang sangat cepat.
Ketika smartphone memberi perintah kepada mikrokontroler untuk melakukan proses
motion cut, mikrokontroler belum siap karena mikrokontroler belum menerima data balikan dari RCB-4 tentang posisi kaki robot sehingga membuat robot sering kali salah melangkah dan terjatuh. Hal inilah yang membuat penulis merasa kesulitan karena untuk mendapatkan performa robot yang cepat, dibutuhkan proses yang cepat pula, oleh karena itu penulis membuat algoritma yang di dalamnya tidak terdapat delay sehingga proses komunikasi data sangat cepat. Tetapi di sisi lain, untuk mendapatkan robot yang