5 BAB II DASAR TEORI
Pada bab ini akan dibahas beberapa teori pendukung yang digunakan sebagai acuan
dalam merealisasikan sistem. Teori-teori yang digunakan dalam pembuatan skripsi ini
terdiri dari
2.1. Kajian Pustaka
a. Algoritma Pengambilan Keputusan Pada Kiper Robot Sepak Bola [1]
Pada jurnal ini penulis merancang dan membuat sebuah robot humanoid
yang berfungsi sebagai kiper dengan menggunakan platform Bioloid. Robot ini
menggunakan CM-510 sebagai kontroler dan HaViMo2 sebagai input warna. Robot
kiper ini terdiri dari 16 servo sebagai pengeksekusi program. Algoritma
pengambilan keputusan pada robot ini adalah menggunakan kombinasi dari kedua
sudut pada servo kepala.
Pengujian dilakukan dengan memberikan variasi letak bola sehingga
menghasilkan variasi sudut kepala. Berdasarkan hasil pengujian. Ada 4 kondisi
yang dapat dilakukan robot kiper ini, yaitu robot mengidentifikasi bola, robot jatuh
ke tengah, robot jatuh ke kiri atau jumping kiri dan robot jatuh ke kanan atau
jumping kanan. Hasil pengujian ini juga tergantung pada keadaan cahaya dan
kondisi warna karena kamera HaViMo2 mempunyai kelemahan dalam
mengidentifikasi pola maka faktor cahaya akan sangat menentukan baik tidaknya
kamera ini mengidentifikasi warna.
b. Tim Ichiro Dalam Kontes Robot Sepak Bola Indonesia 2014 [2]
Pada Jurnal ini penulis merancang robot humanoid menggunakan
6
ini adalah deteksi bola menggunakan filter jingga-hijau, deteksi gawang dan
deteksi kawan. Deteksi bola menggunakan filter jingga-hijau ini dimaksudkan
warna jingga bola yang berada di lapangan merupakan warna jingga yang valid,
jadi warna jingga di luar lapangan tidak akan mengganggu dalam pedeteksian
bola pada robot. Deteksi Gawang ini digunakan untuk mengenali gawang yang
berwarna kuning. Dengan metode perpotongan garis vertical dan horizontal
akan menghasilkan titik sudut kanan dan kiri. Semua benda kuning yang
tertangkap kamera yang tidak memiliki perpotongan garis tersebut maka
dianggap bukan gawang. Deteksi kawan ini menggunakan pedeteksian warna
seragam yang digunakan sehingga lebih mudah untuk menjalankan koordinasi.
Riset yang dilakukan oleh penulis telah diaplikasikan ke robot.
Penggunaan riset tersebut sangat berpengaruh terhadap performa permainan.
2.2. Deteksi Bola 2.2.1 Colorspace
Colorspace adalah model abstraksi matematis [3, 4] untuk menggambarkan
representasi warna dalam angka-angka, dan biasanya terdiri dari tiga atau empat unsur
warna, seperti RGB, CMYK, HSV, HSL [5], atau YUV. Masing-masing komponen
dasar dalam colorspace adalah penyusun warna.
1. RGBA colorspace
Media transmisi warna seperti yang digunakan pada televisi dan layar
LCD, membuat gambar menggunakan campuran aditif warna dari warna
utama merah, hijau, dan biru. Selain RGB, RGBAcolorspace menambahkan
elemen lain alpha, yang berisi informasi yang transparan dari pencampuran
7 2. YUV colorspace
YUV colorspace mendefinisikan warna dengan menggunakan elemen
luminance (Y) dan dua elemen atau warna komponen chrominance (UV).
Ini merupakan perbaikan dari informasi warna yang digunakan dalam
televisi hitam putih tua yang hanya menggunakan elemen Y. Y elemen
adalah tingkat kecerahan, dan U dan V komponen informasi warna.
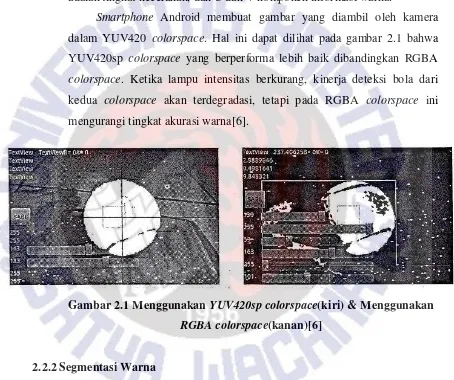
Smartphone Android membuat gambar yang diambil oleh kamera
dalam YUV420 colorspace. Hal ini dapat dilihat pada gambar 2.1 bahwa
YUV420sp colorspace yang berperforma lebih baik dibandingkan RGBA
colorspace. Ketika lampu intensitas berkurang, kinerja deteksi bola dari
kedua colorspace akan terdegradasi, tetapi pada RGBA colorspace ini
mengurangi tingkat akurasi warna[6].
Gambar 2.1 Menggunakan YUV420sp colorspace(kiri) & Menggunakan
RGBA colorspace(kanan)[6]
2.2.2 Segmentasi Warna
Segmentasi warna digunakan untuk memisahkan warna bola oranye dengan
warna lingkungan lainnya. Segmentasi yang dilakukan oleh mengatur batas atas
dan bawah untuk nilai-nilai elemen dalam gambar. Sebagai hasil, citra biner yang
8 2.2.3 Metode Pusat Massa
Pusat massa atau pusat gravitasi pada gambar adalah titik di mana objek
gambar tersebar merata. Setelah segmentasi warna telah dilakukan, pusat gravitasi
pada gambar biner atau grayscale dihitung [7].
2.3. Menghitung Jarak Bola secaraVisual
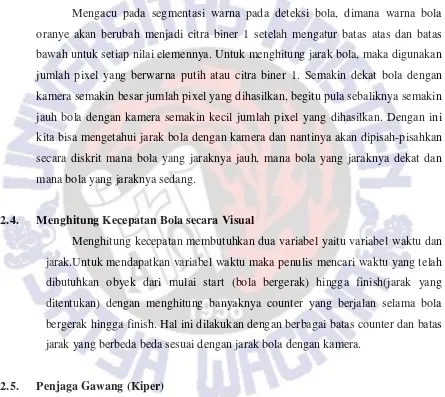
Mengacu pada segmentasi warna pada deteksi bola, dimana warna bola
oranye akan berubah menjadi citra biner 1 setelah mengatur batas atas dan batas
bawah untuk setiap nilai elemennya. Untuk menghitung jarak bola, maka digunakan
jumlah pixel yang berwarna putih atau citra biner 1. Semakin dekat bola dengan
kamera semakin besar jumlah pixel yang dihasilkan, begitu pula sebaliknya semakin
jauh bola dengan kamera semakin kecil jumlah pixel yang dihasilkan. Dengan ini
kita bisa mengetahui jarak bola dengan kamera dan nantinya akan dipisah-pisahkan
secara diskrit mana bola yang jaraknya jauh, mana bola yang jaraknya dekat dan
mana bola yang jaraknya sedang.
2.4. Menghitung Kecepatan Bola secara Visual
Menghitung kecepatan membutuhkan dua variabel yaitu variabel waktu dan
jarak.Untuk mendapatkan variabel waktu maka penulis mencari waktu yang telah
dibutuhkan obyek dari mulai start (bola bergerak) hingga finish(jarak yang
ditentukan) dengan menghitung banyaknya counter yang berjalan selama bola
bergerak hingga finish. Hal ini dilakukan dengan berbagai batas counter dan batas
jarak yang berbeda beda sesuai dengan jarak bola dengan kamera.
2.5. Penjaga Gawang (Kiper)
Seorang penjaga gawang merupakan suatu hal yang utama dalam permainan
sepakbola. Untuk menjadi seorang penjaga gawang (kiper), ada beberapa hal yang
harus diperhatikan. Pada dasarnya seorang kiper diharuskan memiliki kemampuan
dasar handling, serta refleks yang cukup baik, selain itu ada kemampuan individual
9 1) Daya Jangkau
Kemampuan kiper dalam menjangkau bola sangatlah penting untuk
dikuasai. Kiper harus tahu dimana kemampuan menjangkau bola,
sehingga dapat menentukan kapan bola akan ditangkap, ditinju,
ditangkis, ataupun terbang menyelamatkan gawang.
2) Penempatan Posisi
Semakin baik posisi kiper berada, semakin mudah pula kiper
menghalau serangan lawan. Kiper haruslah paham di mana kedua
kaki harus berpijak. Sejauh apa dari gawang, berada pada sudut
berapa dan di mana kira-kira lawan membidik tendangannya. Titik
ini menjadi awal pengambilan keputusan ketika kiper memutuskan
untuk tetap di tempat atau maju keluar sarang untuk menggagalkan
usaha penyerang lawan. Di sini pula berawal pikiran untuk
memutuskan untuk lompat, terbang, menangkis, menyergap.
3) Refleks
Poin penting untuk seorang kiper. Kecepatan bereaksi terhadap bola
yang sering berubah arah. Karena apabila seorang kiper tidak
memiliki refleks yang bagus, ia akan selalu terlambat dalam
menangkis ataupun menghalau bola yang datang.
4) Konsentrasi
Seorang kiper, secara kasat mata seolah tidak selalu bekerja setiap
menitnya. Ketika bola berada di area pertahanan lawan, kiper akan
cenderung diam. Namun sebenarnya, ketika dalam situasi seperti ini,
seorang kiper akan lebih baik jika berkonsentrasi penuh dalam
permainan. Konsentrasi sejak serangan lawan belum dibangun akan
10 2.6 Aturan Pertandingan
Aturan main dalam KRSBI divisi KidSize Humanoid League ini diadopsi
sepenuhnya dari RoboCup Soccer Humanoid League Rules and Setup. Robot
dalam divisi KidSize ini berukuran antara 30 hingga 60 cm. Secara umum setiap
pertandingan antara dua tim yang berhadap-hadapan dilaksanakan dalam 2 x 5
(atau 10) menit dengan masa istirahat di paruh pertandingan selama maksimal 5
menit. Setiap tim terdiri dari maksimal lima robot humanoid yang salah satunya
harus diprogram sebagai penjaga gawang dengan robot lainnya sebagai pemain
penyerang atau bertahan[9]. Untuk aturan-aturan yang lebih detail yaitu :
1. Setup Lapangan
1.1Konstruksi Lapangan
Lapangan sepak bola memiliki ukuran luas karpet dengan panjang 10,4
meter dan lebar 7,4 meter. Dimensi lapangan ditunjukan pada gambar
11
Gambar 2.2 Dimensi lapangan[9]
Untuk dimensi gawang adalah sebagai berikut :
Gambar 2.3 Dimensi gawang tampak atas[9]
12
Tiang gawang terbuat dari silinder kuning dengan diameter 10cm. Untuk
net memilki tinggi 80cm, berwarna putih, abu-abu atau hitam dan
berlubang dengan lubang yang memiliki diameter lebih kecil dari bola.
1.2Warna Lapangan
Gambar 2.5 Layout dan warna lapangan [9]
Lapangan berwarna hijau dengan garis lapangan berwarna putih. Untuk
gawang keduanya berwarna kuning dan bola berwarna oranye.
2. Robot
Sebuah pertandingan dimainkan oleh 2 tim dengan masing-masing tim
terdiri dari tidak lebih dari 5 robot pemain. Dengan salah satu robot pemain
berfungsi sebagai kiper dan robot yang lain sebagai pemain penyerang atau
bertahan. Robot yang berpartisipasi dalam kompetisi harus memiliki tubuh
mirip manusia, seperti yang ditunjukkan pada Gambar. 2.6 Mereka harus
terdiri dari dua kaki, dua tangan, dan satu kepala, yang melekat pada batang.
13
mereka. Semua tindakan dari robot harus kinematik setara dengan gerakan
humanoid.
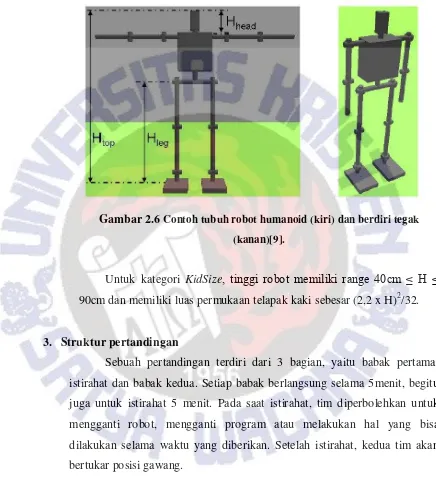
Gambar 2.6 Contoh tubuh robot humanoid (kiri) dan berdiri tegak (kanan)[9].
Untuk kategori KidSize, tinggi robot memiliki range 40cm ≤ H ≤
90cm dan memiliki luas permukaan telapak kakisebesar (2,2 x H)2/32.
3. Struktur pertandingan
Sebuah pertandingan terdiri dari 3 bagian, yaitu babak pertama,
istirahat dan babak kedua. Setiap babak berlangsung selama 5menit, begitu
juga untuk istirahat 5 menit. Pada saat istirahat, tim diperbolehkan untuk
mengganti robot, mengganti program atau melakukan hal yang bisa
dilakukan selama waktu yang diberikan. Setelah istirahat, kedua tim akan
![Gambar 2.4 Dimensi gawang [9]](https://thumb-ap.123doks.com/thumbv2/123dok/852340.471148/7.612.102.534.78.677/gambar-dimensi-gawang.webp)
![Gambar 2.5 Layout dan warna lapangan [9]](https://thumb-ap.123doks.com/thumbv2/123dok/852340.471148/8.612.100.568.189.679/gambar-layout-dan-warna-lapangan.webp)