Lampiran A
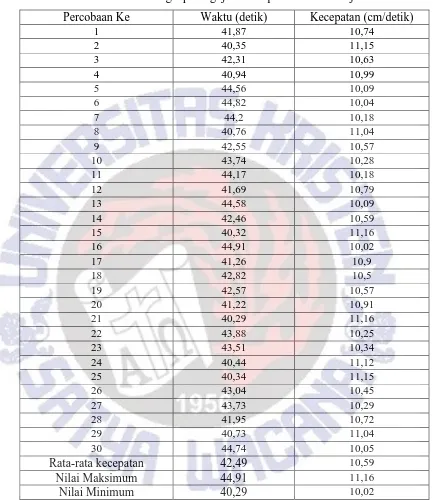
Tabel A.1. Tabel Lengkap Pengujian Kecepatan Motion Maju Robot.
Percobaan Ke Waktu (detik) Kecepatan (cm/detik)
1 41,87 10,74
2 40,35 11,15
3 42,31 10,63
4 40,94 10,99
5 44,56 10,09
6 44,82 10,04
7 44,2 10,18
8 40,76 11,04
9 42,55 10,57
10 43,74 10,28
11 44,17 10,18
12 41,69 10,79
13 44,58 10,09
14 42,46 10,59
15 40,32 11,16
16 44,91 10,02
17 41,26 10,9
18 42,82 10,5
19 42,57 10,57
20 41,22 10,91
21 40,29 11,16
22 43,88 10,25
23 43,51 10,34
24 40,44 11,12
25 40,34 11,15
26 43,04 10,45
27 43,73 10,29
28 41,95 10,72
29 40,73 11,04
30 44,74 10,05
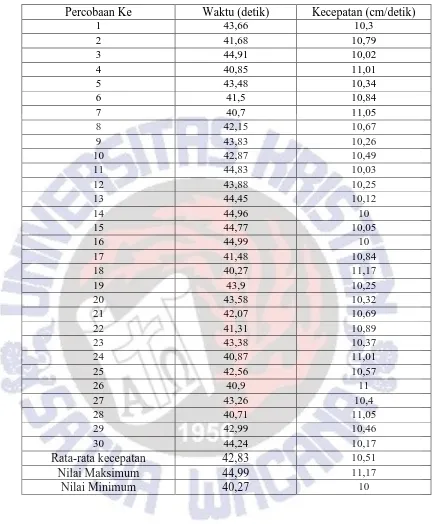
Tabel A.2. Tabel Lengkap Pengujian Kecepatan Motion Mundur Robot.
Percobaan Ke Waktu (detik) Kecepatan (cm/detik)
1 43,66 10,3
2 41,68 10,79
3 44,91 10,02
4 40,85 11,01
5 43,48 10,34
6 41,5 10,84
7 40,7 11,05
8 42,15 10,67
9 43,83 10,26
10 42,87 10,49
11 44,83 10,03
12 43,88 10,25
13 44,45 10,12
14 44,96 10
15 44,77 10,05
16 44,99 10
17 41,48 10,84
18 40,27 11,17
19 43,9 10,25
20 43,58 10,32
21 42,07 10,69
22 41,31 10,89
23 43,38 10,37
24 40,87 11,01
25 42,56 10,57
26 40,9 11
27 43,26 10,4
28 40,71 11,05
29 42,99 10,46
30 44,24 10,17
Rata-rata kecepatan 42,83 10,51
Nilai Maksimum 44,99 11,17
Tabel A.3. Tabel Lengkap Pengujian Kecepatan Motion Geser Kanan Robot.
Percobaan Ke Waktu (detik) Kecepatan (cm/detik)
1 27,21 3,67
2 27,18 3,67
3 27,25 3,66
4 27,23 3,67
5 27,65 3,61
6 27,88 3,58
7 27,43 3,64
8 28,44 3,51
9 27,2 3,67
10 27,78 3,59
11 28,41 3,51
12 27,26 3,66
13 28,08 3,56
14 27,21 3,67
15 27,26 3,66
16 28,42 3,51
17 28,41 3,51
18 27,1 3,69
19 28,44 3,51
20 27,73 3,6
21 27,85 3,59
22 28,41 3,51
23 27,56 3,62
24 27,22 3,67
25 28,08 3,56
26 27,54 3,63
27 27,94 3,57
28 27,27 3,66
29 27,12 3,68
30 28,38 3,52
Rata-rata kecepatan 27,69 3,6
Nilai Maksimum 28,44 3,69
Tabel A.4. Tabel Lengkap Pengujian Kecepatan Motion Geser Kiri Robot.
Percobaan Ke Waktu (detik) Kecepatan (cm/detik)
1 28,39 3,52
2 28,65 3,49
3 28,74 3,47
4 27,93 3,58
5 28,96 3,45
6 28,51 3,5
7 28,94 3,45
8 28,04 3,56
9 27,69 3,61
10 28,72 3,48
11 28,39 3,52
12 28,91 3,45
13 28,53 3,5
14 28,92 3,45
15 28 3,57
16 27,55 3,62
17 28,78 3,47
18 27,75 3,6
19 28,68 3,48
20 28,29 3,53
21 28,64 3,49
22 28,87 3,46
23 28,88 3,46
24 28,57 3,5
25 28,98 3,45
26 28,88 3,46
27 28,87 3,46
28 28,49 3,51
29 28,15 3,55
30 28,46 3,51
Rata-rata kecepatan 28,505 3,5
Nilai Maksimum 28,98 3,62
Tabel A.5. Tabel Lengkap Pengujian Kecepatan Motion Putar Kanan Robot.
Percobaan Ke Waktu (detik) Kecepatan (°/detik)
1 15,94 22,58
2 15,65 23
3 15,42 23,34
4 15,28 23,56
5 15,09 23,85
6 15,81 22,77
7 15,46 23,28
8 16,31 22,07
9 16,05 22,42
10 15,96 22,55
11 15,93 22,59
12 16,24 22,16
13 16,07 22,4
14 15,09 23,85
15 16,29 22,09
16 15,68 22,95
17 16,37 21,99
18 15,87 22,68
19 16,31 22,07
20 15,36 23,43
21 15,25 23,6
22 16,41 21,93
23 16,01 22,48
24 16,38 21,97
25 16,42 21,92
26 15,89 22,65
27 15,03 23,95
28 16,47 21,85
29 16,15 22,29
30 16,32 22,05
Rata-rata kecepatan 15,88 22,67
Nilai Maksimum 16,47 23,95
Tabel A.6. Tabel Lengkap Pengujian Kecepatan Motion Putar Kiri Robot.
Percobaan Ke Waktu (detik) Kecepatan (°/detik)
1 14,75 24,4
2 13,65 26,37
3 14,73 24,43
4 13,69 26,29
5 13,47 26,72
6 14,08 25,56
7 13,54 26,58
8 13,51 26,64
9 13,77 26,14
10 13,56 26,54
11 13 27,69
12 13,2 27,27
13 14,6 24,65
14 13,96 25,78
15 13,54 26,58
16 14,14 25,45
17 13,2 27,27
18 14,22 25,31
19 14,38 25,03
20 13,9 25,89
21 13,26 27,14
22 13,31 27,04
23 13,96 25,78
24 13,91 25,88
25 13,94 25,82
26 13,67 26,33
27 14,7 24,48
28 14,45 24,91
29 13,39 26,88
30 13,31 27,04
Rata-rata kecepatan 13,82 26,06
Nilai Maksimum 14,75 27,69
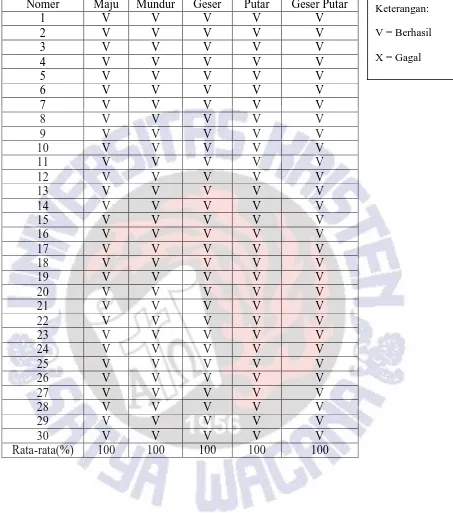
Tabel A.7. Tabel Pengujian CutMotion.
Nomer Maju Mundur Geser Putar Geser Putar
1 V V V V V
2 V V V V V
3 V V V V V
4 V V V V V
5 V V V V V
6 V V V V V
7 V V V V V
8 V V V V V
9 V V V V V
10 V V V V V
11 V V V V V
12 V V V V V
13 V V V V V
14 V V V V V
15 V V V V V
16 V V V V V
17 V V V V V
18 V V V V V
19 V V V V V
20 V V V V V
21 V V V V V
22 V V V V V
23 V V V V V
24 V V V V V
25 V V V V V
26 V V V V V
27 V V V V V
28 V V V V V
29 V V V V V
30 V V V V V
Rata-rata(%) 100 100 100 100 100
Keterangan:
V = Berhasil
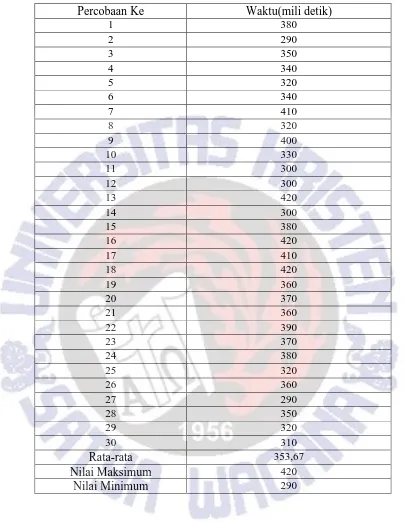
Tabel A.8. Tabel Lengkap Pengujian Waktu Respon Robot.
Percobaan Ke Waktu(mili detik)
1 380
2 290
3 350
4 340
5 320
6 340
7 410
8 320
9 400
10 330
11 300
12 300
13 420
14 300
15 380
16 420
17 410
18 420
19 360
20 370
21 360
22 390
23 370
24 380
25 320
26 360
27 290
28 350
29 320
30 310
Rata-rata 353,67
Nilai Maksimum 420
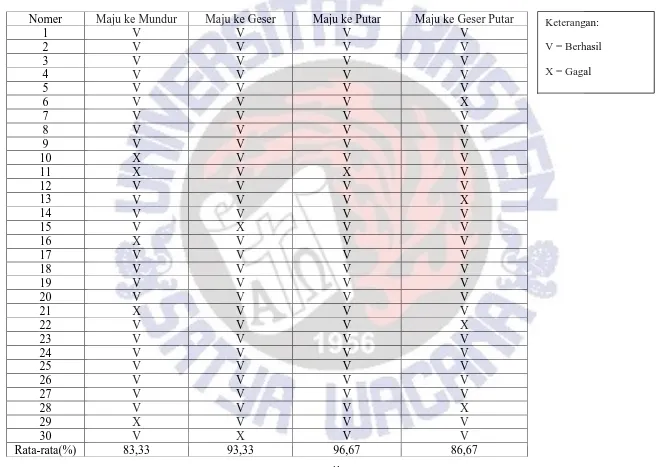
Tabel A.9. Tabel Peralihan Motion Maju ke Motion Berulang Lainnya.
Nomer Maju ke Mundur Maju ke Geser Maju ke Putar Maju ke Geser Putar
1 V V V V
2 V V V V
3 V V V V
4 V V V V
5 V V V V
6 V V V X
7 V V V V
8 V V V V
9 V V V V
10 X V V V
11 X V X V
12 V V V V
13 V V V X
14 V V V V
15 V X V V
16 X V V V
17 V V V V
18 V V V V
Keterangan:
V = Berhasil
Tabel A.10. Tabel Peralihan Motion Mundur ke Motion Berulang Lainnya.
Nomer Mundur ke Maju Mundur ke Geser Mundur ke Putar Mundur ke Geser Putar
1 V V V V
2 V V V V
3 V V V V
4 X V V X
5 V V V X
6 V V V V
7 V V V V
8 V X V V
9 V V V V
10 V V V V
11 V V V V
12 V V X V
13 X V V V
14 V V V V
15 V V V X
16 V V V V
17 V V V X
18 V V V V
19 X V V V
Keterangan:
V = Berhasil
Tabel A.11. Tabel Peralihan Motion Geser ke Motion Berulang Lainnya.
Nomer Geser ke Maju Geser ke Mundur Geser ke Putar Geser ke Geser Putar
1 V V V V
2 V V V X
3 V V V V
4 V V V V
5 V X V V
6 V V X V
7 V V V X
8 V V V V
9 V V V V
10 V V V V
11 V V V X
12 V V V V
13 V X V V
14 V V V V
15 X V V V
16 V V V V
17 V V V V
18 V V V V
19 V V V V
Keterangan:
V = Berhasil
Tabel A.12. Tabel Peralihan Motion Putar ke Motion Berulang Lainnya.
Nomer Putar ke Maju Putar ke Mundur Putar ke Geser Putar ke Geser Putar
1 V V V V
2 V V V V
3 V V V X
4 V V V V
5 V V X V
6 V V V V
7 V V V V
8 V V V V
9 V V V V
10 V V V X
11 V X V V
12 V V V V
13 X V V V
14 V V V V
15 V V V V
16 V V V V
17 V V V V
18 V V V V
19 V V V X
Keterangan:
V = Berhasil
Tabel A.13. Tabel Peralihan Motion Geser Putar ke Motion Berulang Lainnya.
Nomer Geser Putar ke Maju Geser Putar ke Mundur Geser Putar ke Geser Geser Putar ke Putar
1 V X V V
2 V V X V
3 V V V V
4 V V V X
5 V V V V
6 V V V V
7 V X X V
8 V X V V
9 X V V V
10 V V V V
11 V V V V
12 X V V V
13 V V V X
14 V V V V
15 V V V V
16 V V V V
17 X X X V
18 V V V V
19 V V V V
Keterangan:
V = Berhasil
Tabel A.14. Tabel Lengkap Pengujian Lama Waktu Robot Berjalan dengan
Baik.
Percobaan ke Waktu (detik)
1 489
441
2 441
488
3 488
4 470
5 466
6 443
7 455
8 477
9 452
10 435
11 482
12 422
13 453
14 424
15 429
16 466
17 448
18 489
19 476
20 464
21 466
22 442
23 480
24 435
25 440
26 485
27 437
28 483
29 477
30 441
Rata-rata waktu 458,5
Nilai Maksimum 489
Tabel A.15. Tabel Lengkap Pengujian perbandingan antara gyroscope yang
dikolaborasikan dengan jalan dinamis dan gyroscope yang tanpa jalan dinamis.
Percobaan ke Kolaborasi Gyroscope dengan jalan dinamis
Gyroscope hidup tanpa jalan dinamis
1 5 kali jatuh 0 kali jatuh
2 6 kali jatuh 0 kali jatuh
3 5 kali jatuh 2 kali jatuh
4 4 kali jatuh 0 kali jatuh
5 7 kali jatuh 1 kali jatuh
6 7 kali jatuh 1 kali jatuh
7 8 kali jatuh 0 kali jatuh
8 5 kali jatuh 2 kali jatuh
9 5 kali jatuh 1 kali jatuh
10 6 kali jatuh 0 kali jatuh
11 7 kali jatuh 0 kali jatuh
12 5 kali jatuh 0 kali jatuh
13 7 kali jatuh 1 kali jatuh
14 7 kali jatuh 0 kali jatuh
15 6 kali jatuh 0 kali jatuh
Rata-rata 6 kali jatuh 0,53 kali jatuh
Nilai Maksimum 8 kali jatuh 2 kali jatuh