1
Mahasiswa Jurusan Teknik Elektro UNDIP 2Dosen Jurusan Teknik Elektro UNDIP
MAKALAH SEMINAR
PENGGUNAAN LCI DRIVE SYNCHRONOUS MOTOR Dinas Perawatan Listrik
Jurusan Teknik Elektro Fakultas Teknik Universitas Diponegoro Jl. Prof. Sudharto, Tembalang, Semarang, Indonesia
Abstrak: Pada divisi Wire Rod Mill dan proses produksi dari bahan baku
salah satu stand yang berfungsi untuk mereduksi dimensi industri sangat diperlukan untuk meningkatkan kualitas
Salah satunya adalah penerapan teknologi penggunaan motor listrik. Pada digunakan LCI Drive Synchronous Motor
untuk menjalankan mill dari stand 20 sam tentang penggunaan LCI
produksi Pabrik Batang Kawat ( Kata-kunci : Finishing Block PT. Krakatau Steel merupakan
yang bergerak dalam bidang industri manufaktur yang bergerak dalam bidang pengecoran
Krakatau Steel sudah banyak menghasilkan produk seperti: kawat baja, baja profil, plat baja maupun beja beton.
Pada Pabrik Batang Kawat (
penerapan teknologi otomasi industri adalah hal yang penting untuk meningkatkan kualitas, efektivitas dan efesiensi produksi. Salah satunya adalah penggunaan motor-motor listrik.
motor tersebut digunakan untuk menjalankan mulai dari furnace hingga finishing. Pada Block Mill digunakan LCI Drive
Motor yang berfungsi untuk menjalankan mill dari stand 20 sampai 29.
TUJUAN
Makalah Kerja Praktek ini
mengetahui penggunaan LCI Drive Synchronous Motor secara umum pada Pabrik Batang Kawat (Wire Rod Mill) PT. Krakatau Steel Cilegon.
BATASAN MASALAH
Dalam laporan kerja praktek ini membahas hal-hal yang bersifat umum yang menyangkut tentang penggunaan
Synchronous Motor pada Finishing Block Mill di Divisi Wire Rod Mill (WRM) PT. Krakatau Steel Cilegon
Mahasiswa Jurusan Teknik Elektro UNDIP
MAKALAH SEMINAR KERJA PRAKTEK
DRIVE SYNCHRONOUS MOTOR PADA FINISHING BLOCK MILL Dinas Perawatan Listrik Pabrik Batang Kawat ( Wire Rod Mill )
PT. Krakatau Steel Cilegon Arif Nurhadi1, Tejo Sukmadi2
Jurusan Teknik Elektro Fakultas Teknik Universitas Diponegoro Jl. Prof. Sudharto, Tembalang, Semarang, Indonesia
Wire Rod Mill (WRM) PT.Krakatau Steel Cilegon terdapat dan proses produksi dari bahan baku billet menjadi wire rod. Finishing Block Mill
salah satu stand yang berfungsi untuk mereduksi dimensi wire rod. Penerapan teknologi otomasi industri sangat diperlukan untuk meningkatkan kualitas, efektivitas, dan efisiensi produksi. Salah satunya adalah penerapan teknologi penggunaan motor listrik. Pada Finishing Block Mill
Drive Synchronous Motor buatan ABB (Asea Brown Boveri) yang berfungsi untuk menjalankan mill dari stand 20 sampai 29. Laporan Kerja Praktek ini akan membahas tentang penggunaan LCI Drive Synchronous Motor pada Finishing Block Mill
produksi Pabrik Batang Kawat (Wire Rod Mill) PT. Krakatau Steel Cilegon. Finishing Block Mill, LCI Drive, Synchronous Motor
PT. Krakatau Steel merupakan perusahaan yang bergerak dalam bidang industri manufaktur yang bergerak dalam bidang pengecoran baja. PT. Krakatau Steel sudah banyak menghasilkan produk seperti: kawat baja, baja profil, plat baja maupun abrik Batang Kawat (Wire Rod Mill) penerapan teknologi otomasi industri adalah hal yang penting untuk meningkatkan kualitas, efektivitas dan efesiensi produksi. Salah satunya motor listrik. Motor-motor tersebut digunakan untuk menjalankan mill
hingga finishing. Pada Finishing Drive Synchronous yang berfungsi untuk menjalankan mill dari
Kerja Praktek ini bertujuan untuk Drive Synchronous pada Pabrik Batang Kawat Krakatau Steel Cilegon.
Dalam laporan kerja praktek ini hal yang bersifat umum yang penggunaan LCI Drive Finishing Block Mill M) PT. Krakatau
DASAR TEORI
Unit Produksi PT.Krakatau Steel Cilegon
PT. Krakatau Steel merupakan industri baja terbesar di Indonesia
didirikan pada tanggal
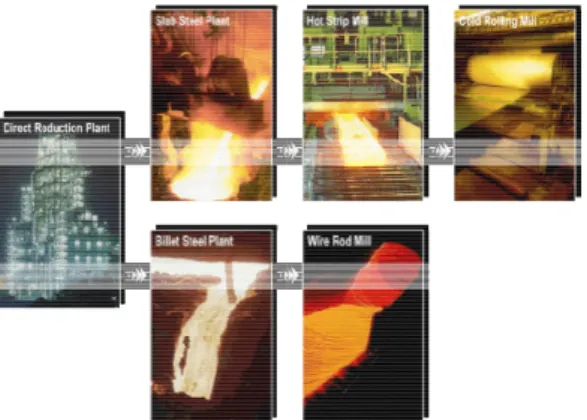
mempunyai fasilitas produksi mencakup 6 pabrik utama, yaitu Pabrik Besi Spons ( Reduction Plant), Pabrik Slab Baja ( Plant), Pabrik Billet Baja (
Pabrik Baja Lembaran Panas ( Pabrik Baja Lembaran Dingin ( Mill), dan Pabrik Baja Batang Kawat (W Mill).
Gambar 1. Proses Produksi PT.Krakatau Steel
Wire Rod Mill (WRM) Pada Divisi WR
produk-produknya digunakan bahan baku FINISHING BLOCK MILL
)
Jurusan Teknik Elektro Fakultas Teknik Universitas Diponegoro
(WRM) PT.Krakatau Steel Cilegon terdapat beberapa tahap Finishing Block Mill meruapakan Penerapan teknologi otomasi , efektivitas, dan efisiensi produksi. Finishing Block Mill ) yang berfungsi Laporan Kerja Praktek ini akan membahas Finishing Block Mill pada proses
Unit Produksi PT.Krakatau Steel Cilegon
Krakatau Steel merupakan industri di Indonesia. Perusahaan yang tanggal 31 Agustus 1970 ini asilitas produksi mencakup 6 Pabrik Besi Spons (Direct ), Pabrik Slab Baja (Slab Steel ), Pabrik Billet Baja (Billet Steel Plant), Pabrik Baja Lembaran Panas (Hot Strip Mill), Pabrik Baja Lembaran Dingin (Cold Rolling ), dan Pabrik Baja Batang Kawat (Wire Rod
Gambar 1. Proses Produksi PT.Krakatau Steel
WRM, untuk menghasilkan produknya digunakan bahan baku
berupa baja billet dengan ukuran penampang 130x130 mm sampai 180x180 mm dan panjang 9 m.
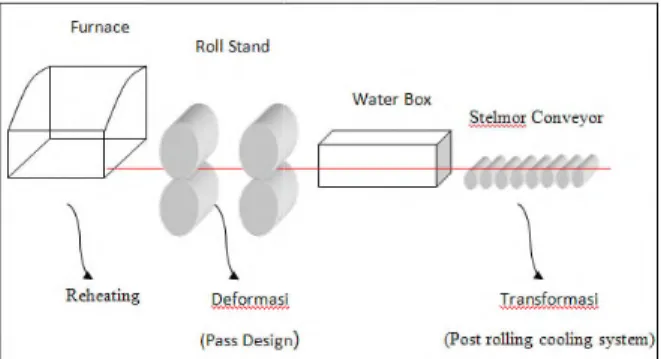
Proses utama produksi
batang kawat baja dibagi menjadi 3 tahap, yaitu reheating, deformasi dan transformasi
1) Tahap Reheating (pemanasan)
Pada tahap ini, billet dipanaskan dalam furnace dengan suhu mencapai 1
1200o C sesuai dengan grade
masing billet. Pengaturan dan pengawasan temperatur ini dilakukan pada
2) Tahap Deformasi
Setelah dipanaskan, billet akan mengalami proses deformasi atau pembentukan yaitu billet akan direduksi dari ukuran
awal square 130x130 mm atau
menjadi batang kawat dengan diameter 5.5 20 mm round. Proses reduksi ini terjadi pada 6 stand dengan tingkat reduksi yang berbeda beda. Stand-stand tersebut antara lain yaitu: a. Pre-roughing mill
Pre-roughing mill terdiri dari 4 horizontal-vertical stand, yang berfungsi untuk mereduksi billet
180x180 mm menjadi
dengan ukuran 105x105 mm. Untuk penggunaan billet dengan penampan 130x130 mm, 2 stand
digunakan (dummy). b. Roughing mill
Roughing Mill terdiri dari 8 horizontal stand ex Schl Jerman, dimana 4 stand terbuka sedangkan 4 stand tipe tertutup. Stand Roughing masing-masing digerakkan oleh motor DC berfungsi untuk mereduksi transfer bar dari Pre-Roughing
105 x 105 mm menjadi
ukuran 43 x 43 mm yang selanjutnya merupakan input untuk Intermediate Mill c. Intermediate mill
Dua stand pertama dari Intermediate Mill adalah two-high horizontal stand close housing dari Schloeman Jerman.
d. Cantilever intermediate mill Empat stand berikutnya di
Mill telah dimodernisasi dari tipe horizontal stand mejadi
vertical (cartridge) Morgardshammar Swedia. e. Pre-finishing block mill
Pre-finishing block (tipe V
yang berfungsi untuk mereduksi bar dari Intermediate, terdiri dari 2
tungsten carbide yang terpasang dengan penampang square 130x130 mm sampai 180x180 mm dan panjang 9 Proses utama produksi billet menjadi dibagi menjadi 3 tahap, yaitu , deformasi dan transformasi.
(pemanasan)
dipanaskan dalam furnace dengan suhu mencapai 1150o C – grade dari masing-Pengaturan dan pengawasan temperatur ini dilakukan pada Pulpit 1.
akan mengalami au pembentukan yaitu ukuran penampang atau 180x180 mm menjadi batang kawat dengan diameter
5.5-Proses reduksi ini terjadi pada dengan tingkat reduksi yang
berbeda-tersebut antara lain yaitu: terdiri dari 4
, yang berfungsi berpenampang mm menjadi transfer bar dengan ukuran 105x105 mm. Untuk dengan penampang stand pertama tidak
terdiri dari 8 two-high ex Schloeman-Siemag stand pertama tipe stand berikutnya Stand Roughing yang masing digerakkan oleh motor DC berfungsi untuk mereduksi transfer dengan ukuran 105 x 105 mm menjadi bar dengan ukuran 43 x 43 mm yang selanjutnya Intermediate Mill. Intermediate Mill high horizontal stand tipe dari Schloeman-Siemag antilever intermediate mill
berikutnya di Intermediate modernisasi dari tipe mejadi tipe
horizontal-dari Danieli Swedia.
(tipe V mill/No-twist) yang berfungsi untuk mereduksi bar dari , terdiri dari 2 set roll yang terpasang dengan
sudut 45o pada setiap set roll membentuk sudut 90
sebelumnya. Dengan pengaturan seperti ini, diperoleh kondisi
seperti konfigurasi stand.
f. Finishing bloc
No-Twist Finishing block 10 set roll tungsten carbide berfungsi untuk mereduksi bar menjadi produk akhir. Seperti Finishing, setiap
dengan sudut 45
saling tegak lurus membentuk sudut 90o dengan set roll
Gambar 2. Proses pembuatan batang kawat 3) Tahap Transformasi
Tahap transformasi merupakan pengaturan perubahan struktur dari struktur austenit
ferrit/perlit yang nantinya akan
menentukan sifat
kawat dilakukan dengan pendinginan yang terencana (
system) di stelmor conveyor
cooling system juga mencakup pengaturan scale dan pengaturan besar butir
sebelum bertransformasi dengan mengatur pendingin air di
setelah bar keluar dari
Gambar 3. Gambaran umum proses produksi Pabrik Batang Kawat
pada mill line di mana set roll saling tegak lurus membentuk sudut 90o dengan set roll sebelumnya. Dengan pengaturan , diperoleh kondisi no-twist seperti konfigurasi horizontal-vertical
ck mill
Finishing block terdiri dari set roll tungsten carbide yang berfungsi untuk mereduksi bar menjadi produk akhir. Seperti
Pre-, setiap set roll terpasang dengan sudut 45o pada mill line dan saling tegak lurus membentuk sudut
set roll sebelumnya.
ambar 2. Proses pembuatan batang kawat ransformasi
transformasi merupakan pengaturan perubahan struktur dari austenit menjadi struktur /perlit yang nantinya akan menentukan sifat mekanis dari batang kawat dilakukan dengan pendinginan yang terencana (post rolling cooling stelmor conveyor. Post rolling juga mencakup pengaturan dan pengaturan besar butir austenit sebelum bertransformasi dengan pendingin air di water box keluar dari roll stand terakhir.
. Gambaran umum proses produksi Pabrik Batang Kawat
Motor Sinkron
Prinsip Dasar
Motor Sinkron adalah mesin sinkron yang digunakan untuk mengubah energi listrik menjadi energi mekanik. Mesin sinkron mempunyai kumparan jangkar pada stator dan kumparan medan pada rotor. Kumparan jangkarnya berbentuk sama dengan mesin induksi, sedangkan kumparan medan mesin sinkron dapat berbentuk kutub sepatu (salient) atau kutub dengan celah udara sama rata (rotor silinder). Arus searah (DC) untuk menghasilkan fluks pada kumparan medan dialirkan ke rotor melalui cincin dan sikat.
Motor sinkron jarang dipakai pada industri karena berputar dengan kecepatan yang tetap tetapi memiliki karakteristik yang unik. Kebanyakan motor sinkkron berdaya antara 150 KW (200hp) sampai 15 MW (20.000hp) dan berputar dengan kecepatan antara 150-1800 rpm. Jadi motor sinkron terutama dipakai pada industri berat.
Konstruksi
Gambar 4 Konstruksi motor sinkron
Motor sinkron secara konstruksi mirip dengan salient-pole AC generator. Stator dibentuk dari inti magnetik, kumparan 3 fasa. Jadi kumparannya juga identik dengan motor induksi 3 fasa. Rotor terdiri dari kutub yang dieksitasi dengan arus dc. Saat coil eksitasi dihubung seri ke 2 slip-ring, dan arus dc diberikan ke kumparan dari eksternal exciter.
Gambar 5 Bagian-bagian motor sinkron Motor sinkron modern dilengkapi brushless excitation, mirip yang digunakan paga generator sinkron. Berdasar gambar di atas arus dc Ix dari rectifier diberikan secara langsung ke salient-pole kumparan, tanpa melalui brush dan slip-ring. Arus dapat divariasikan dengan pengontrolan Ic yang mengalir di kumparan medan dari exciter.
Rotor dan stator selalu mempunyai jumlah kutub yang sama. Sepert pada motor induksi jumlah kutub menentukan kecepatan sinkron motor.
Starting Motor Sinkron
Motor sinkron tidak dapat bekerja dengan sendiri, maka
Motor sinkron dilengkapi dengan kumparan sangkar tupai
Selama starting, kumparan medan dc dihubung singkat
Ketika motor dijalankan sampai kecepatan sinkron, kemudian arus starting digunakan untuk menghasilkan flux medan
Torsi Pull in
Jika kutub pada rotor saat arus eksitasi berhadapan dengan kutub pada stator yang mempunyai polaritas beda, maka akan terjadi daya tarik magnet yang kuat diantara keduanya.
Tarik-menarik antar keduanya mengunci kutub stator dan rotor bersama-sama
Torsi pull in pada motor sinkron sangat kuat, namun arus dc harus digunakan pada momen yang tepat, sebab motor akan berhenti dan circuit breaker akan terkait, jika arus dc tidak digunakan pada momen yang tepat.
Untuk itu, pada prakteknya, motor sinkron menggunakan starter yang didisain agar bisa mendeteksi kapan momen yang tepat untuk menggunakan arus eksitasi.
Gambar 6 Kutub stator dan rotor berlawanan
Motor Saat berbeban
• Saat kondisi tanpa beban, kutub pada rotor langsung berhadap-hadapan dengan kutub pada stator pada sumbu yang sama.
• Selama beban mekanik digunakan, kutub rotor sedikit tertinggal dari kutub stator, tapi kemudian berubah menjadi kecepatan yang sinkron
Torsi yang lebih besar dihasilkan dengan meningkatkan sudut pemisah
Ketika beban mekanik melebihi torsi pull out, motor akan melambat dan akan berhenti
Torsi pull out tergantung pada mmf yang dihasilkan oleh rotor dan stator
Mmf pada rotor tergantung dari arus eksitasi DC, sedangkan mmf pada stator tergantung pada arus AC yang mengalir pada kumparan
Gambar 7. Motor saat menghasilkan daya mekanik
Perbandingan Motor Induksi Sinkron
Motor Induksi dapat digunakan, : • Bila kecepatannya lebih besar dari • Konstruksi dan perawatan mudah
• Pada kecepatan rendah, PF buruk dan efisiensinya otomatis sangat rendah
Motor Sinkron cocok untuk aplikasi kecepatan putar rendah
• PF dapat diatur agar bernilai 1, sehingga efisiensinya tinggi
• Dapat memperbaiki faktor daya sistem dengan tetap menanggung beban mekanisnya
• Dapat dirancang untuk menangani torsi awal yang besar
Gambar 8. Grafik perbandingan arus awal yang lebih besar dihasilkan dengan meningkatkan sudut pemisah
Ketika beban mekanik melebihi torsi pull out, motor akan melambat dan akan tergantung pada mmf yang dihasilkan oleh rotor dan stator
Mmf pada rotor tergantung dari arus eksitasi DC, sedangkan mmf pada stator tergantung pada arus AC yang mengalir
ghasilkan daya mekanik
Motor Induksi dan Motor
Motor Induksi dapat digunakan, :
Bila kecepatannya lebih besar dari 600 rpm Konstruksi dan perawatan mudah
Pada kecepatan rendah, PF buruk dan efisiensinya otomatis sangat rendah
Motor Sinkron cocok untuk aplikasi kecepatan PF dapat diatur agar bernilai 1, sehingga tor daya sistem dengan tetap menanggung beban Dapat dirancang untuk menangani torsi
Grafik perbandingan arus awal
Gambar 9. Grafik perbandingan torsi awal
FINISHING BLOCK MILL Finishing Block
satu bagian penting pada proses produksi di Pabrik Batang Kawat
Finishing Block mill memiliki dua jalur yang masing-masing jalur terdiri dari
ini bertugas untuk mereduksi kawat baja yang akan dihasilka
digerakkan oleh motor sinkron 5 MW pada masing-masing jalur.
Gambar 10. Finishing Block M LCI DRIVE SYNCHRONOUS MOTOR
LCI Drive Synchronous Motor
merupakan sebuah drive motor sinkron.
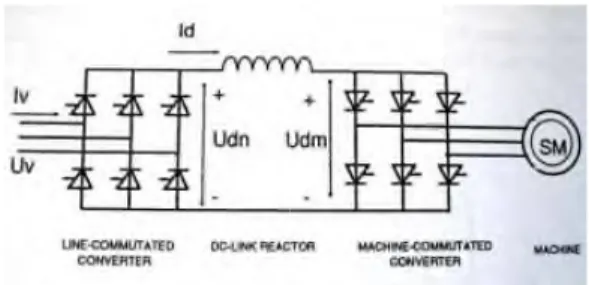
Gambar 11. Prinsip kerjanya
tegangan masukan 50 Hz ke tegangan yang sesuai dengan rectifier. Pada
AC diubah menjadi DC. Pada tegangan DC, tegangannya mengandung
enam kali dari frekuensi suplainya. Untuk mengurangi pengaruh harmonisa ini dan
Grafik perbandingan torsi awal
MILL
mill merupakan salah satu bagian penting pada proses produksi di tang Kawat (Wire Rod Mill). memiliki dua jalur yang masing jalur terdiri dari 10 stand. Stand mereduksi diameter batang yang akan dihasilkan. Stand ini digerakkan oleh motor sinkron 5 MW pada
Finishing Block Mill LCI DRIVE SYNCHRONOUS MOTOR
Drive Synchronous Motor
merupakan sebuah drive untuk mengontrol
Gambar 11.Blok sistem
Prinsip kerjanya, trafo akan mengubah tegangan masukan 50 Hz ke tegangan yang . Pada rectifier tegangan AC diubah menjadi DC. Pada tegangan DC, tegangannya mengandung ripple frekuensi enam kali dari frekuensi suplainya. Untuk mengurangi pengaruh harmonisa ini dan
memisahkan rectifier dari inverter maka diletakkan induktansi pada intermediate DC-link . Pada sisi mesin, inverter mengubah daya DC menjadi AC dengan memvariasikan frekuensinya. Dan daya AC dengan variasi frekuensi inilah yang akan disuplaikan ke motor sinkron. Semakin tinggi frekuensi semakin cepat pula putaran motor sinkron. Hal ini sesuai dengan persamaan matematis :
n =
dimana : n= putaran motor (rpm) f= frekuensi (Hz)p= jumlah kutub
Bagian-Bagian Sistem
LCI Drive Synchronous Motor ini terdiri dari 4 komponen utama yaitu :
1) Transformator
Trafo ini mengubah tegangan suplai masukan dari jaringan ke tegangan rectifier.
Gambar 12. Transformator
2) Frekuensi Konverter
Frekuensi converter Tyrak LCI YRTK 1470-1860 6180BN001 buatan dari ABB (Asea Brown Boveri) Swedia ini berperan dalam mengatur besaran frekuensi yang akan disuplaikan ke motor sinkron
Gambar 13. Panel Konverter
3) Smoothing Inductance
Smoothing inductance ini berfungsi untuk menghaluskan atau mengurangi ripple gelombang DC
Gambar 14. Reaktor Smoothing Inductance
4) Motor Sinkron
Pada LCI yang digunakan di pabrik Wire Rod Mill ini digunakan motor sinkron buatan ABB dengan tipe HSSUL 15/1152 dengan spesifikasi berikut ini :
ABB No 3062HC101 Manufacturing No. 4549237 Power 5000 KW Speed 700..800...1400 rpm Voltage 2x1096..2x1245..2x1350 v Frequency 23.33..36.67..46.67 Hz Stator Current 1441..1257..1268 A Power factor 0.932..0.940..0.867 Isolation temp.class/ F/F Temp rise Overload
-continously (Temp.rise cla7s F) 115%
-5 s (60 times/h) 150%
RMS 100%
Number of poles 4
Excitation with brushes and slip rings
Excitation voltage 73 V Excitation current 430 A
Efficiency 97.3..96.8..97.5 % Commutation inductance 280uH Commutation reactance 9.3 % Connection YY Standards IEC 34-1 Mass 22000 kg Moment of inertia 722 kgm2 Construction type IM 1001 Protection class IP 54 Cooling IC 37
Cooling air flow 6m3 /s
Gambar 15. Motor Sinkron
Cara Kerja Sistem Eksitasi Medan
Pada LCI Drive ini motor sinkron diberi eksitasi dengan menggunakan slip ring. Secara prinsipnya eksitasi motor sinkron ditunjukkan pada gambar di bawah
Gambar 16 Eksitasi Slip Ring
Yaitu eksitasi ke kumparan medan dikontrol dengan mengatur firing angle pada exciter
Arus Stator pada LCI Motor Sinkron
Gambar 17. Arus pada stator
Gambar di atas menunjukkan arus pada inverter dan motor. Lalu arus mengalir dari T1 ke T3, lalu dari T2 ke T4, T3 ke T5, dari T4 ke T6 dan seterusnya. Artinya, pertama kali arus menga masuk ke fasa A keluar fasa C. Setelah komutasi T1 ke T3, akan ada arus mengalir masuk fasa B dab keluar fasa C. Setelah komutasi T2 ke
arus ke fasa B keluar fasa A. Setelah komutasi dari T3 ke T5, akan ada arus masuk ke fasa C keluar fasa A. Lalu setelah komutasi T4 ke T6 akan ada arus masuk fasa C keluar fasa B, dan seterusnya. Jadi arus akan bergantian antara 3 fasa pada m dengan pola tertentu, termasuk arah arus pada masing-masing fasa.
Penggunaan konverter 12 pulsa
Sebagaimana DC konverter, LCI konverter juga menghasilkan harmonisa
Harmonic number = K*(number of pulses)±1 Dimana: K=1,2,3,
Motor Sinkron
Pada LCI Drive ini motor sinkron diberi eksitasi dengan menggunakan slip ring. Secara n ditunjukkan pada
Eksitasi Slip Ring
Yaitu eksitasi ke kumparan medan dikontrol dengan
Arus Stator pada LCI Motor Sinkron
Arus pada stator
Gambar di atas menunjukkan arus pada mengalir dari T1 ke T3, lalu dari T2 ke T4, T3 ke T5, dari T4 ke T6 dan seterusnya. Artinya, pertama kali arus mengalir masuk ke fasa A keluar fasa C. Setelah komutasi T1 ke T3, akan ada arus mengalir masuk fasa B dab keluar fasa C. Setelah komutasi T2 ke T4, akan ada arus ke fasa B keluar fasa A. Setelah komutasi dari T3 ke T5, akan ada arus masuk ke fasa C keluar fasa A. Lalu setelah komutasi T4 ke T6 akan ada arus masuk fasa C keluar fasa B, dan seterusnya. Jadi arus akan bergantian antara 3 fasa pada motor dengan pola tertentu, termasuk arah arus pada
Sebagaimana DC konverter, LCI konverter
Harmonic number = K*(number of pulses)±1
Pada LCI konverter pada
berupa jempatan 6 pulsa. Untuk K=1 akan menghasilkan Harmonisa ke
K=2 harmonisa ke dihasilkan, dan seterusnya.
Amplitude of harmonic current = Fundamental current/harmonic number
Jadi pada LCI 6 pulsa akan muncul harmonisa ke-5 dengan amplitudo ±20% dari arus fundamental (50Hz), harmonisa ke
amplitudo ±14%, harmonisa ke amplitudo ±9%, dan seterusnya.
Secara normal LCI
drive dengan daya besar, artinya harmonisa yang dihasilkan juga besar. Maka harmonisa dari LCI akan berpengaruh terhadap supl
dan dapat membahayakan pada peralatan lain yang terhubung ke catu daya. Maka diperlukan cara untuk mengurangi harmonisa atau pengaruhnya. Pada dua persamaan di atas, j jumlah pulsa diubah da
harmonisa ke-5 dan ke
harmonisa terendah akan muncul pada harmonisa ke-11 dan ke
terbesar akan mejadi kira
sebelumnya 20%. Jadi harmonisa akan dieliminasi, maka lebih menguntungkan menggunakan LCI drive
pulsa
Gambar 18. Konverter 12 pulsa
Indikator Posisi Rotor dan Generator Pulsa
Motor dilengkapi dengan indikator posisi rotor. Alat ini dipasang di
pda shaft motor. Alat ini memberi sinyal pulsa bedasar posisi rotor. Pulsa ditunjukkan pada gambar di bawah
Gambar
Pada LCI konverter pada sisi jala-jala adalah berupa jempatan 6 pulsa. Untuk K=1 akan menghasilkan Harmonisa ke-5 dan ke-7. Untuk K=2 harmonisa ke-11 dan ke-13 akan dihasilkan, dan seterusnya.
Amplitude of harmonic current = Fundamental
sa akan muncul harmonisa 5 dengan amplitudo ±20% dari arus fundamental (50Hz), harmonisa ke-7 dengan amplitudo ±14%, harmonisa ke-11 dengan amplitudo ±9%, dan seterusnya.
Secara normal LCI drive merupakan dengan daya besar, artinya harmonisa ang dihasilkan juga besar. Maka harmonisa dari LCI akan berpengaruh terhadap suplai daya dan dapat membahayakan pada peralatan lain ubung ke catu daya. Maka diperlukan cara untuk mengurangi harmonisa atau pengaruhnya. Pada dua persamaan di atas, jika jumlah pulsa diubah dari 6 menjadi 12 maka 5 dan ke-7 akan hilang dan harmonisa terendah akan muncul pada 11 dan ke-13. Dan amplitudo terbesar akan mejadi kira-kira 9% dibanding sebelumnya 20%. Jadi harmonisa akan maka lebih menguntungkan drive 12 pulsa daripada 6
Konverter 12 pulsa
Indikator Posisi Rotor dan Generator Pulsa
Motor dilengkapi dengan indikator posisi rotor. Alat ini dipasang di Non-drive end ini memberi sinyal pulsa bedasar posisi rotor. Pulsa ditunjukkan pada
Sinyal pada channel C dapat digunakan untuk memulai saat arus stator mengalir
misal ke fasa A, sinyal di channel D dapat digunakan untuk start motor saat arus stator di fasa B, dan seterusnya. Channel A dipisahkan dari tiga channel lain pada gambar di atas, karena channel ini digunakan untuk hal yang berbeda. Channel ini digunakan untuk kontrol kecepatan drive. Saat channel mengirim pulsa dalam jumlah besar untuk tiap putaran rotor, maka akan diperoleh kecepatan yang sangat cepat dan sinyal umpan balik yang cepat untuk kecepatan aktualnya.
Start Sistem Drive LCI
Motor sinkron pada kondisi diam tidak dapat menghasilkan daya reaktif.
langkah-langkah prosedur untuk starting. Pertama, peralatan tambahan seperti pompa oli, kipas pendingin, dan sebagainya dihidupkan dahulu. Lalu field exciter diaktifkan dan medan magnetik rotor dihidupkan. Lalu dari indikator posisi rotor memberikan informasi ke peralatan kontrol untuk menentukan ke fasa mana arus harus dialirkan masuk dan arus dialirkan keluar dari motor. Intinya, thyristor bekerja dengan memicu pulsa. Lalu rectifier diaktifkan dan daya mulai mengalir ke inverter dan fasa pada motor. Rotor lalu berputar, dan indikator akan mengidentifikasi posisi dimana sinyal dikirimkan ke sebagai masukan ke kontrol untuk menentukan waktu komutasi arus ke fasa lainnya. Lalu indikator mengidentifikasikan ke peralatan kontrol untuk menentukan dimana arus yang akan mengalir ke fasa yang lain. Kecepatan meningkat sesuai daya yang disalurkan. Saat kecepatan meningkat sekitar 10%
nominalnya motor dapat menyalurkan daya reaktif yang cukup untuk mengkomutasi arus pada inverter.
Pengereman LCI
Pada gambar di bawah terlihat thyristor, tegangan, dan arah arusnya. Daya 3 fasa AC disuplaikan ke rectifier dengan tegangan rms fase ke fase Uv volt dan arus AC I1. Daya m
trafo ke rectifier. Di rectifier daya diubah ke DC dengan tegangan Udn dan polaritas terlihat di gambar ( firing angle, α, antara 0
pada sisi mesin, memiliki firing angle
α). Polaritas tegangan diatur oleh inverter. diatur lebih besar dari Udm. Jadi arus Id mengalir dari rectifier ke inverter dan motor sinkron. Arah arus Id juga ditentukan oleh thyristor (arus pada thyristor mengalir dari anoda ke katoda).
Sinyal pada channel C dapat digunakan untuk memulai saat arus stator mengalir salah satu fasa ke fasa A, sinyal di channel D dapat untuk start motor saat arus stator di fasa B, dan seterusnya. Channel A dipisahkan dari tiga channel lain pada gambar di atas, karena channel ini digunakan untuk hal yang berbeda. Channel ini digunakan untuk kontrol kecepatan drive. Saat ulsa dalam jumlah besar untuk tiap putaran rotor, maka akan diperoleh kecepatan yang sangat cepat dan sinyal umpan balik yang
Motor sinkron pada kondisi diam tidak dapat menghasilkan daya reaktif. Jadi diperlukan langkah prosedur untuk starting. Pertama, peralatan tambahan seperti pompa oli, kipas pendingin, dan sebagainya dihidupkan dahulu. Lalu field exciter diaktifkan dan medan magnetik rotor indikator posisi rotor emberikan informasi ke peralatan kontrol untuk menentukan ke fasa mana arus harus dialirkan masuk dan arus dialirkan keluar dari motor. Intinya, thyristor bekerja dengan memicu pulsa. Lalu rectifier diaktifkan dan daya mulai mengalir ke ada motor. Rotor lalu berputar, dan indikator akan mengidentifikasi posisi dimana nyal dikirimkan ke sebagai masukan ke kontrol u komutasi arus ke fasa . Lalu indikator mengidentifikasikan ke peralatan kontrol untuk menentukan dimana arus yang akan mengalir ke fasa yang lain. Kecepatan sesuai daya yang disalurkan. Saat kecepatan meningkat sekitar 10% dari kecepatan rkan daya reaktif omutasi arus pada
terlihat thyristor, tegangan, dan arah arusnya. Daya 3 fasa AC dengan tegangan rms fase ke fase Uv volt dan arus AC I1. Daya mengalir dari daya diubah ke DC dengan tegangan Udn dan polaritas terlihat di , antara 0 - 90). Inverter firing angle β, (β =180°-). Polaritas tegangan diatur oleh inverter. Udn diatur lebih besar dari Udm. Jadi arus Id mengalir ke inverter dan motor sinkron. Arah arus Id juga ditentukan oleh thyristor (arus pada thyristor mengalir dari anoda ke katoda).
Gambar 20 Daya masuk ke rectifier Sac= *Uv0*Iln Daya yang mengalir dari dikirim ke DC-link
Pdn=Udn*Id
Daya DC, Pdm, dari inverter ke DC Pdm=-(Udm)*Id
Terlihat bahwa daya yang terkirim ke DC adalah negatif. Jadi konverter di sisi motor tidak mengirim daya ke
DC-daya dari DC-link . Dari hal tersebut, diperoleh cara untuk mengubah arah aliran dayanya. Dengan mengubah firing angle
dari nilai lebih dari 90° ke k
arah Udm berubah dan Pdm menjadi positif, artinya konverter pada motor berubah sebagai rectifier dan mengirim daya ke DC
Konverter sisi jala-jala juga berubah angle dari nilai kurang dari 90° ke lebih dari 90° jadi dapat menerima daya dari DC
mengirim balik ke jala
mengalirkan energi kembali ke jala
satunya cara motor dapat mengalirkan energi adalah mengurangi kecepatan. Jadi, dengan mengubah firing angle
merupakan cara pengereman LCI drive.
Pembalikan Putaran LCI Drive
Untuk membalik putaran motor sinkron adalah dengan mengubah urutan fasanya atau dengan kata lain mengubah urutan thyristor mana yang aktif. Dengan denikian
akan berputar dengan arah yang lain, jadi motor akan berputar dengan arah yang berkebalikan. Jadi LCI frequency converter
drive berputar pada dua arah.
Gambar 21.
Prinsip Kontrol LCI Drive
Peralatan kontro
menjalankan berbagai macam fungsi. Ada yang Blok arah arus LCI Daya masuk ke rectifier dari jala-jala
*Uv0*Iln
Daya yang mengalir dari rectifier ke DC, Pdn
Daya DC, Pdm, dari inverter ke DC-link (Udm)*Id
Terlihat bahwa daya yang terkirim ke DC-link negatif. Jadi konverter di sisi motor tidak
-link , tetapi menerima link . Dari hal tersebut, diperoleh cara untuk mengubah arah aliran dayanya. firing angle pada inverter (β) dari nilai lebih dari 90° ke kurang dari 90°. Lalu arah Udm berubah dan Pdm menjadi positif, artinya konverter pada motor berubah sebagai dan mengirim daya ke DC-link . jala juga berubah firing dari nilai kurang dari 90° ke lebih dari menerima daya dari DC-link dan mengirim balik ke jala-jala. Artinya motor mengalirkan energi kembali ke jala-jala. Satu-satunya cara motor dapat mengalirkan energi adalah mengurangi kecepatan. Jadi, dengan firing angle pada konverter
ra pengereman LCI drive.
Pembalikan Putaran LCI Drive
Untuk membalik putaran motor sinkron adalah dengan mengubah urutan fasanya atau
mengubah urutan thyristor Dengan denikian medan stator akan berputar dengan arah yang lain, jadi motor akan berputar dengan arah yang berkebalikan. frequency converter dapat mengatur berputar pada dua arah.
pembalikan putaran
Prinsip Kontrol LCI Drive
Peralatan kontrol pada LCI drive menjalankan berbagai macam fungsi. Ada yang
mengatur sequence kontrol, sebagai fungsi proteksi dari LCI drive, kontrol kecepatan, kontrol arus eksitasi medan dan sebagainya.
Gambar 22 Faktor otomasi
Sequence Control
Sequence control terdiri dari peralatan tambahan dan peralatan pelengkap. Jadi sequence mengontrol unit lubrikasi minyak ke motor, kipas pendingin pada frekuensi inverter,
dengan peralatan lain, operasi CB dan lain
Fungsi Proteksi
Sistem drive yang besar harus memiliki banyak proteksi untuk menghindari atau membatasi bahaya saat konisi beban lebih atau saat sistem drive tidak berfungsi. LCI sistem juga memiliki beberapa fungsi proteksi. Proteksi yang penting adalah proteksi terhadap arus lebih,
incorrect phase sequence. LCI konverter dilengkapi CT untuk proteksi arus lebih dan sinyal umpan balik kecepatan untuk masalah over speed.
Regulasi LCI Drive
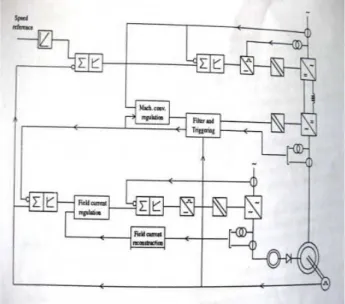
Gambar 23. Alur prinsip kontrol
Tujuan dari regulasi LCI drive adalah untuk menjaga kecepatan sama dengan nilai acuan dari kecepatan yang dibutuhkan. Kecepatan harus dijaga dari variasi pembebanan pada mesin, suhu
dan fluktuasi batas tegangan spesifik, dan lain Fungsi tambahan dari peralatan kontrol adalah untuk menjaga tegangan motor terhadap batas motor dan frekuensi inverter bekerja tanpa membahayakan peralatan. Peralatan kontrol yang belum ada adalah untuk mengkalkulasi secara kontrol, sebagai fungsi proteksi , kontrol kecepatan, kontrol arus
Faktor otomasi
Sequence control terdiri dari peralatan tambahan dan peralatan pelengkap. Jadi sequence mengontrol unit lubrikasi minyak ke motor, kipas pendingin pada frekuensi inverter, interlocking dengan peralatan lain, operasi CB dan lain-lain.
Sistem drive yang besar harus memiliki banyak proteksi untuk menghindari atau membatasi bahaya saat konisi beban lebih atau saat sistem drive tidak berfungsi. LCI sistem juga memiliki beberapa fungsi proteksi. Proteksi yang penting arus lebih, over speed, . LCI konverter dilengkapi CT untuk proteksi arus lebih dan sinyal umpan
over speed.
Alur prinsip kontrol
Tujuan dari regulasi LCI drive adalah untuk menjaga kecepatan sama dengan nilai acuan dari kecepatan yang dibutuhkan. Kecepatan harus dijaga dari variasi pembebanan pada mesin, suhu ambient dan fluktuasi batas tegangan spesifik, dan lain-lain. han dari peralatan kontrol adalah untuk menjaga tegangan motor terhadap batas motor dan frekuensi inverter bekerja tanpa membahayakan peralatan. Peralatan kontrol yang belum ada adalah untuk mengkalkulasi secara
akurat firing intances pada thyristor di inv Diagram blok untuk kontrol frekuensi inverer ditunjukkan oleh gambar di bawah.
Gambar 24 Diagram Blok Kontrol
Bagian atas diagram menunjukkan kontrol arus CT pada sisi terima memberikan nilai aktual dari arus. Nilai referensi untuk arus berasap dari keluaran loop pengaturan kecepatan. Loop pengaturan kecepatan berasal dari umpan balik kecepatan dari indikator posi
generator pulsa pada akhir dari
pada shaft motor, dan input referensi berasal dari sistem komputer pada ruang kontrol.
Kontrol dari inverter mesin dan exciter juga dibuat dengan cara yang sam Nilai input ke konverter mesi
masuk ke rectifier, nilai yang telah difilter dari arus dan tegangan motor (dari f
kecepatan dapat dikalkulasi). Keluaran dari kontrol konverter mesin dipicu pulsa ke thyristor pada konverter mesin. Lalu dilakukan komputasi di kontrol konverter.
Field exciter
magnetik dari rotor. EMF mesin (tegangan motor) didapat dari fluks rotor dan kecepatan motor. Secara normal tegangan motor meningkat linier dengan kenaikan kecepatan samapi dengan kecepatan nominal. Untuk kecepatan yang lebih lebih besar dari kecepatan nominal tegangan motor harus konstan terhadap kenaikan kecepatan. Ini mengondikasikan bahwa arus eksitasi harus dikurangi seiring kenaikan kecepatan melebihi kecepatan nominalnya. Artinya nilai masukan ke kontr eksitasi harus termasuk kecepatan motor tegangan motor dan arus eksitasi aktual yang nantinya nilai kecepatan dari kontrol eksitasi memicu pulsa ke konverter eksitasi.
Jadi prinsipnya, dalam pengaturan kecepatan motor. Kecepatan aktual pada thyristor di inverter. Diagram blok untuk kontrol frekuensi inverer ditunjukkan oleh gambar di bawah.
Diagram Blok Kontrol Bagian atas diagram menunjukkan kontrol arus CT pada sisi terima memberikan nilai aktual dari arus. Nilai referensi untuk arus berasap dari keluaran loop pengaturan kecepatan. Loop pengaturan kecepatan berasal dari umpan balik kecepatan dari indikator posisi dan alat generator pulsa pada akhir dari non-drive end motor, dan input referensi berasal dari sistem komputer pada ruang kontrol.
Kontrol dari inverter mesin dan field juga dibuat dengan cara yang sama. Nilai input ke konverter mesin adalah arus , nilai yang telah difilter dari arus dan tegangan motor (dari frekuensi dan kecepatan dapat dikalkulasi). Keluaran dari kontrol konverter mesin dipicu pulsa ke thyristor pada konverter mesin. Lalu dilakukan
trol konverter.
Field exciter mengontrol fluks
magnetik dari rotor. EMF mesin (tegangan motor) didapat dari fluks rotor dan kecepatan motor. Secara normal tegangan motor meningkat linier dengan kenaikan kecepatan samapi dengan kecepatan nominal. Untuk cepatan yang lebih lebih besar dari kecepatan nominal tegangan motor harus konstan terhadap kenaikan kecepatan. Ini mengondikasikan bahwa arus eksitasi harus dikurangi seiring kenaikan kecepatan melebihi kecepatan nominalnya. Artinya nilai masukan ke kontrol eksitasi harus termasuk kecepatan motor tegangan motor dan arus eksitasi aktual yang nantinya nilai kecepatan dari kontrol eksitasi memicu pulsa ke konverter eksitasi.
Jadi prinsipnya, dalam pengaturan kecepatan motor. Kecepatan aktual
dibandingkan dengan kecepatan referensi atau acuan yang telah diproram melalui PLC. Pengaturannya sendiri melalui keluaran PLC berupa tegangan 0-10 V DC untuk putaran forward dan -10 – 0 V DC untuk putaran reverse. Nantinya nilai tegangan dari PLC tersebut dimasukkan ke drive sebagai masukan yang mengindikasikan putran motor 0-100 %.
PENUTUP
Berdasarkan pembahasan di atas, dapat disimpulkan beberapa hal sebagai berikut. Pertama, dalam proses produksi pada Divisi Wire Rod Mill (WRM) terjadi 3 tahapan yaitu reheating (pemanasan), deformasi, dan transformasi.
Kedua LCI terdiri dari
•Trafo yang mengubah tegangan jala-jala ke tegangan yang sesuai dengan frekuensi inverter.
•Frekuensi inverter yang terdiri dari bagian rectifier, inverter dan peralatan field exciter. Rectifier mengkonversi masukan 50Hz AC ke DC. Inverter mengubah DC ke daya AC dengan variasi frekuensi. Field exciter mensuplai eksitasi mesin dengan daya ke medan magnetik pada rotor.
•Smoothing reactor antara rectifier dan inverter adalah bagian dari frekuuensi inverter yang berfungsi untuk menghaluskan ripple pada tegangan DC. •Motor sinkron yang diberi daya pada
kumparan stator dari keluaran inverter dan rotor mendapat eksitasi medan dari field exciter yang merupakan bagian dari frekuensi inverter.
Ketiga, Pada motor sinkron fluks magnetik yang dihasilkan dari arus pada kumparan medan stator dan arus pada kumparan rotor menjaga motor tetap berputar. Motor juga dapat dilakukan pengereman dan pembalikan arah putar dengan mengatur firing angle pada frekuensi inverter.
Keempat, Frekuensi inverter memiliki lebih dari satu konverter dan inverter untuk digunakan sebagai 12 pulse net-reaction yang berfungsi untuk mengurangi harmonisa dari frekuensi inverter.
Kelima, Peralatan kontrol dari LCI drive berfungsi sebagai proteksi, serta fungsi regulasi pengaturan kecepatan dan arus eksitasi
Beberapa hal yang dapat diperhatikan ialah: Pertama, perlu adanya pemahaman yang mendasar baik teori maupun praktek dalam melakukan perawatan dan perbaikan pada bidang tertentu, hal ini akan mempermudah dalam pengecekan kerusakan.
Kedua, penguasaan teknik perangkat keras (hardware) dan perangkat lunak (software) mutlak diperlukan dan tidak bisa dipisahkan satu sama lain.
Ketiga, dalam menjalankan kegiatan produksi baik di dalam maupun di luar pabrik sebaiknya SOP yang sudah ada dijalankan agar terjadi proses produksi yang efektif, efisien dan aman (safety).
Keempat, perlu adanya komunikasi dan kerjasama yang baik antara teknisi elektro dengan teknisi mesin.
DAFTAR PUSTAKA
[1] Wildi, Theodore. 1993. ELECTRICAL MACHINES, DRIVES, AND POWER SYSTEMS. Prentice Hall Inc
[2] ABB Tyrak LCI Drive, 1995. “An
Introduction to Load Commutated
Inverter Drive With Synchronous
Motors”
[3] Niiranem, Jouko. OPERATION OF
SYNCHRONOUS MOTOR AND
CYCLOCONVERTER
[4] Tyrak LCI. User Manual. Thyristor convertor with microcomputer for large ac drive systems.
[5] Tyrak LCI. User Manual. Rod Bar and Mill Program for large ac/ac drive systems
[6] Tyrak LCI. Catalouge. Load Commutated Inverter For Synchonous Machine In Rolling Mill Application. [7] Customer Documentation Rolling Mill
Motor Krakatau Steel
[8] Purwadi, dkk. 2003. SEJARAH PT.
KRAKATAU STEEL. Pustaka
Raja.Yogyakarta. [9] http://www.abb.com [10] http://www.wikipedia.co.id [11] http://dunia-listrik.blogspot.com
gggffs fgs gg ARIF NURHADI (L2F 006 013). Dilahirkan di Tegal, 22 Desember 1987, menempuh pendidikan dasar di SD N Banyumanik 1 Semarang, SMP N 21 Semarang, SMA N 4 Semarang. Saat ini masih menjadi Mahasiswa Jurusan Teknik Elektro Fakultas Teknik Universitas Diponegoro Semarang konsentrasi Teknik Energi Listrik.
Mengetahui dan Mengesahkan Pembimbing
Ir Tejo Sukmadi, MT NIP. 196111171988031001 Tanggal :