5
LANDASAN TEORI
2.1 Citra
2.1.1 Definisi Citra
Citra menurut kamus bahasa Indonesia diartikan sebagai gambar atau rupa. Sehingga dalam dunia teknologi informasi, citra ini dapat diartikan sebagai gambar atau rupa hasil representasi dari suatu objek nyata dalam bentuk dua atau tiga dimensi yang dapat dimengerti oleh komputer. Definisi citra lainnya adalah suatu fungsi intensitas warna dua dimensi f
( )
x,y di mana x dan y mewakili koordinat lokasi suatu titik dannilai dari fungsi yang merupakan tingkat intensitas warna atau tingkat keabu-abuan dari titik tersebut (Robert J. Schalkoff).
2.1.2 Pengolahan Citra (Image Processing)
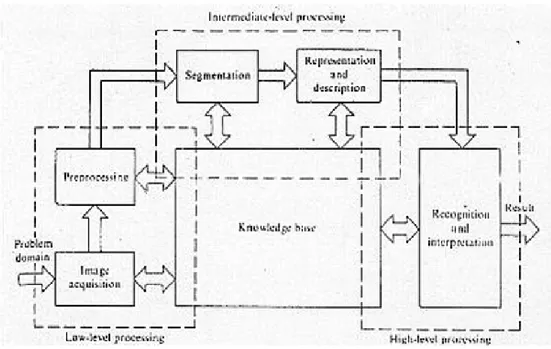
Pengolahan Citra (Image Processing) merupakan bidang yang berhubungan dengan proses transformasi citra (image) yang bertujuan untuk mendapatkan kualitas citra yang lebih baik (Michael G. Fairhurst). Langkah-langkah utama dalam pengolahan citra (Rafael C. Gonzalez) dapat dilihat pada gambar 2.1, akan dijelaskan sebagai berikut:
1. Image Acquisition merupakan langkah untuk pengambilan citra digital. Langkah ini membutuhkan sebuah sensor pencitraan di mana mengubah sinyal yang diterima menjadi suatu citra digital. Sensor pencitraan berupa kamera berwarna atau hitam putih yang menghasilkan citra setiap 1/30 detik. Jika output dari kamera atau sensor
pencitraan yang lainnya bukan dalam bentuk digital, maka sebuah analog-to-digital
converter akan mengubahnya kedalam bentuk digital.
2. Preprocessing. Fungsi utama dari preprocessing adalah memperbaiki citra dengan cara-cara tertentu di mana meningkatkan kemungkinan sukses bagi proses lainnya.
Preprocessing berhubungan dengan teknik untuk memperbaiki kontras,
menghilangkan noise, dan mengisolasi suatu area yang berisi suatu informasi.
3. Segmentation membagi citra masukan menjadi bagian-bagian penting atau disebut juga objek. Pada umumnya, segmentation merupakan tugas yang sulit dari pengolahan citra digital. Jika prosedur dari segmentation ini kompleks maka akan terjadi proses yang lama untuk mencapai solusi yang sukses dari permasalahan citra. Jika prosedur dari segmentation ini lemah atau tidak konsisten maka akan akan menghasilkan kegagalan. Dalam istilah pengenalan pola, peranan penting dari
segmentation adalah mengekstrak karakter dan kata individu dari latar belakang.
4. Representation and Description. Keluaran dari tahapan segmentation biasanya merupakan data yang pikselnya masih kasar, yang merupakan baik batas dari area ataupun semua titik yang terdapat dalam area tersebut. Sehingga harus dilakukan pengubahan data menjadi bentuk yang sesuai untuk pengolahan komputer. Keputusan pertama yang hams dibuat apakah data digambarkan sebagai batas atau sebagai area yang penuh. Representasi batas berfokus pada karakterisitik eksternal sedangkan representasi area berfokus pada properti internal yang berupa tekstur atau bentuk kerangka. Memilih representasi yang digunakan merupakan bagian dari pencarian solusi untuk mentransformasi data kasar menjadi bentuk yang sesuai untuk tahapan pengolahan selanjutnya. Dan sebuah metode harus dispesifikasikan sehingga dapat mendeskripsikan data. Description, atau disebut juga sebagai pemilihan
feature, berhubungan dengan mengekstrak feature yang merupakan dasar dalam
membedakan satu kelas dengan kelas yang lain.
5. Tahap terakhir yaitu recognition dan interpretation. Recognition merupakan proses yang memberikan “label” terhadap suatu objek berdasarkan informasi yang disediakan oleh deskriptornya. Sebagai contoh, untuk mengidentifikasi sebuah karakter misalnya ‘c’ membutuhkan deskriptor yang berhubungan yaitu karakter yang berlabel ‘c’. Interpretation melibatkan pemberian arti kepada sekumpulan objek yang dikenali. Sebagai contoh string yang terdiri dari lima karakter angka merupakan lambang dari kode pos.
Gambar 2.1 Langkah-Langkah Utama Dalam Image Processing
2.2 Pengenalan Pola
Pengenalan Pola (Pattern Recognition) merupakan bidang studi yang melakukan proses analisis gambar yang masukkannya adalah gambar atau citra digital dan menghasilkan keluaran suatu deskripsi dengan tujuan untuk mendapatkan informasi
yang disampaikan oleh gambar atau citra, dengan kata lain meniru kemampuan manusia (otak manusia) dalam mengenali suatu objek atau pola tertentu (Computer Vision, Michael G. Farnhurst).
2.3 Iris Mata
Iris merupakan salah satu bagian dari mata yang memiliki pigmen. Pigmen pada iris ini berfungsi untuk memberikan warna pada mata seseorang seperti warna mata biru atau hijau pada orang barat, dan warna mata coklat atau hitam pada orang Asia. Iris di samping berfungsi untuk memberikan warna, iris juga berfungsi untuk mengatur banyaknya sinar yang masuk ke dalam mata. Apabila kita menatap benda-benda yang memancarkan cahaya seperti lampu atau sinar matahari secara langsung, maka otot-otot iris ini akan mengendur sehingga pupil kita akan mengecil dan cahaya yang masuk akan lebih sedikit. Apabila kita masuk ke ruangan yang gelap dengan sinar sedikit, maka otot-otot iris ini akan berkontraksi sehingga pupil kita akan melebar dan cahaya yang masuk akan lebih banyak. Perilaku iris yang seperti ini analog dengan diafragma iris pada kamera.
2.4 Rekayasa Piranti Lunak
Perangkat lunak menurut Pressman dapat didefinisikan sebagai berikut:
1. Instruksi-instruksi atau program komputer yang bila dieksekusi akan memberikan fungsi dan unjuk kerja yang diinginkan.
2. Struktur data yang membuat program mampu memanipulasi suatu informasi 3. Dokumen-dokumen yang menjelaskan operasi dan pemakaian suatu propaganda.
Dari beberapa definisi diatas, maka dapat disimpukan bahwa perangkat lunak merupakan program komputer, struktur data dan dokumen yang berkaitan, yang menyediakan metode logika, prosedur dan kontrol yang diminta.
RPL menurut Pressman adalah suatu pembentukan dan penggunaan prinsip-prinsip rekayasa dengan tujuan untuk menghasilkan suatu perangkat lunak yang ekonomis dan dapat diandalkan serta dapat bekerja secara efisien pada mesin sesungguhnya.
Pada dasarnya RPL meliputi tiga elemen kunci yaitu: 1. Method (metode)
Mengenai bagaimana membangun suatu suatu perangkat lunak, di mana metode terdiri dari beberapa tugas yaitu perencanaan proyek dan estimasi, analisis kebutuhan perangkat lunak, perancangan struktur data, arsitektur program, prosedur algoritma, pengkodean, testing dan pemeliharaan.
2. Tools
Tools menyediakan dukungan baik secara otomatis maupun semi otomatis untuk
metode. Tools diintegrasikan dengan tujuan informasi yang dihasilkan oleh satu tool dapat digunakan oleh tools lainnya.
3. Procedure
Procedure merupakan perekat antara metode, tools dan procedure juga memungkinkan pembangunan perangkat lunak secara rational dan berkala.
RPL tersusun oleh beberapa langkah yang meliputi metode, tools dan procedure, di mana langkah-langkah ini dikenal dengan sebutan Software Engineering Paradigm. Terdapat beberapa model paradigma yang berbeda, dan paradigma yang digunakan
ditentukan dengan didasarkan pada sifat dari program dan aplikasi, metode dan tools yang digunakan, juga berdasarkan kontrol dan kemampuan pengiriman yang dibutuhkan.
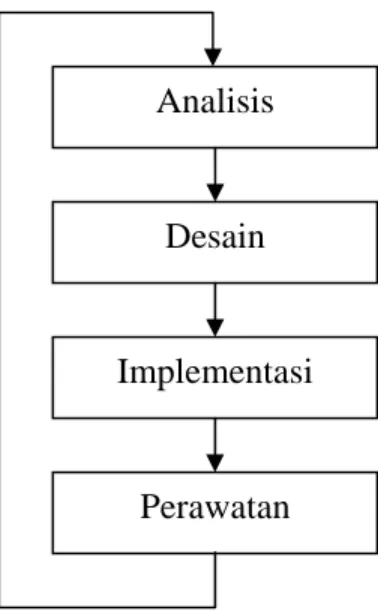
System Development Life Cycle (SDLC) adalah tahapan operasi yang terstruktur
yang dibutuhkan untuk menyusun, membangun dan membuat beroperasinya sebuah sistem informasi baru (Szymanski el al). SDLC dapat dipecah menjadi empat tahap utama yaitu analisis, desain, implementasi dan perawatan. Tahapan utama SDLC dapat dilihat pada Gambar 2.2.
Gambar 2.2 Tahapan Utama SDLC (Pressman)
Contoh dari penerapan SDLC adalah model air terjun (The Waterfall Model) atau siklus hidup klasik (Classic Life Cycle). Metode rekayasa perangkat lunak ini memberikan secara teknik bagaimana membangun sebuah perangkat lunak.
Tahap-tahap dari Classic Life Cycle 1. Analisis dan Perancangan Sistem
Perangkat lunak selalu merupakan bagian dari sebuah system yang besar, maka pekerjaan dimulai dengan mengumpulkan kebutuhan bagi semua elemen sistem. Kemudian mengalokasikan beberapa subset dari kebutuhan-kebutuhan tersebut ke
Analisis
Desain
Implementasi
perangkat lunak. Hal ini sangat penting ketika perangkat lunak harus berhubungan dengan elemen lain seperti perangkat keras, manusia dan basis data. Tahap ini meliputi pengumpulan kebutuhan pada tingkat sistem dengan sedikit analisis dan perancangan ditingkat atas.
2. Analisis Kebutuhan Perangkat Lunak
Proses pengumpulan elemen sistem ditingkatkan dan dipusatkan secara khusus pada perangkat lunak untuk mengerti karakteristik dari program yang akan dibuat. Sistem analisis perangkat lunak harus mengerti ruang lingkup informasi y ang ingin dicakup dalam pembuatan perangkat lunak, seperti fungsi-fungsi yang dibutuhkan, karakteristik, kinerja dan tampilan. Kebutuhan bagi perangkat lunak maupun sistem harus dibicarakan secara bersama dengan pelanggan.
3. Perancangan
Desain perangkat lunak adalah proses bertahap yang berfokus pada empat atribut program yang berbeda, yaitu struktur data, arsitektur perangkat lunak, implementasi kebutuhan dan rincian prosedural (algoritma). Proses perancangan menterjemahkan kebutuhan elemen sistem yang dipresentasikan kedalam sebuah perangkat lunak yang dapat diperkirakan kualitasnya sebelum dilakukan pengkodean.
4. Pengkodean
Pada tahap ini rancangan diterjemahkan kedalam bentuk yang dapat dibaca oleh mesin. Jika perancangan dilaksanakan secara merinci, pengkodean dapat diselesaikan secara mekanis.
5. Pengujian
Jika kode telah dibuat atau ditulis, maka diadakan pengujian program. Pengujian juga dilakukan untuk memastikan masukan (input) yang diberikan menghasilkan keluaran (output) yang diinginkan.
6. Pemeliharaan
Perangkat lunak yang telah dihasilkan secara tidak langsung akan mengalami perbaikan. Hal ini disebabkan masih ditemukan adanya perubahan-perubahan di dalam lingkungan eksternalnya (seperti perubahan yang disebabkan oleh sistem operasi atau peralatan yang baru). Dengan adanya pemeliharaan perangkat lunak, perubahan yang terjadi akan lebih mudah dilakukan dibandingkan harus membuat ulang program baru.
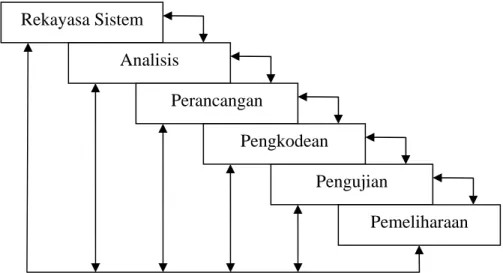
Daur hidup klasik menduduki tempat penting pada Rekayasa Perangkat Lunak (RPL). Paradigma ini menyediakan suatu tempat yang jelas bagi tahap analisis, perancangan, pengkodean, pengujian, dan perawatan. The Watterfall Model dapat dilihat pada gambar 2.3.
Gambar 2.3 The Waterfall Model (Pressman) Rekayasa Sistem Analisis Perancangan Pengkodean Pengujian Pemeliharaan
2.5 Computer Vision
Computer Vision merupakan ilmu yang mempelajari bagaimana komputer dapat
mengenali objek yang diamati (Michael G. Fairhurst). Computer vision adalah kombinasi antara pengolahan citra dan pengenalan pola. Computer vision bersama intelegensia semu (Artificial Intelligence) akan mampu menghasilkan sistem intelegen visual (Visual Intelligence System).
2.6 Transformasi Hough
Transformasi Hough (TH) (Hough, 1962) merupakan teknik pengalokasian bentuk-bentuk dalam gambar. Secara khusus, transformasi ini digunakan untuk ekstraksi garis, lingkaran, dan elips. Untuk ekstraksi garis, definisi matematisnya ekuivalen dengan transformasi Radon (Deans, 1981). TH diperkenalkan oleh Hough dan kemudian digunakan untuk menemukan bubble tracks. Namun Rosenfeld memperkenalkan kemampuan potensialnya sebagai sebuah algoritma image processing (Rosenfeld, 1969). TH kemudian diimplementasikan untuk menemukan garis-garis dalam gambar (Duda, 1972) dan kemudian meluas, karena transformasi ini memiliki banyak kelebihan dan banyak potensi untuk pengembangan lebih lanjut. Kelebihan utamanya yaitu dapat memberikan hasil yang sama dengan pencocokan pola, tetapi lebih cepat (Princen, 1992), (Sklansky, 1978) (Stockman, 1977). Implementasi TH menjelaskan sebuah pemetaan dari titik-titik gambar menuju sebuah ruang akumulator (ruang Hough). Pemetaan tersebut diperoleh dalam bentuk yang efisien secara matematis, berdasarkan fungsi yang menjelaskan kondisi dari target. Pemetaan ini membutuhkan jauh lebih sedikit sumber perhitungan matematis dibangingkan dengan pencocokan pola. Bagaimanapun, TH masih membutuhkan penyimpanan signifikan dan perhitungan
matematis tingkat tinggi. Masalah-masalah ini diselesaikan kemudian, karena mereka memfokuskan untuk pengembangan TH secara kontinu. Bagaimanapun, fakta bahwa TH ekuivalen dengan pencocokan pola telah menjadikannya sebagai salah satu dari teknik-teknik ekstraksi bentuk yang terpopuler yang ada.
2.6.1 Transformasi Hough untuk Garis
Pertama-tama kita akan mempertimbangkan untuk menemukan garis-garis dalam sebuah gambar. Dalam parameter kartesius, titik-titik kolinier dalam sebuah gambar dengan koordinat
( )
x,y dihubungkan dengan kemiringan m dan konstanta c sebagai berikut:c mx
y= + (2.1)
Persamaan ini dapat juga dituliskan dalam bentuk: 0
1= + + Bx
Ay (2.2)
dimana A=−1c dan B=m c. Dengan demikian sebuah garis didefinisikan dengan memberikan sepasang nilai
(
A,B)
. Kita juga dapat mengobservasi sebuah simetri dalam definisi pada persamaan (2.2). Persamaan ini simetris karena sepasang koordinat( )
x,y juga mendefinisikan sebuah garis dalam ruang yang sama dengan parameter(
A,B)
. Persamaan (1.2) dapat dilihat sebagai persamaan sebuah garis untuk koordinat tetap( )
x,y atau sebgai persamaan sebuah garis untuk parameter tetap(
A,B)
. Dengan demikian keduanya dapat digunakan untuk mendefinisikan titik-titik dan garis-garis secara simultan (Aguado, 2000a). TH mengumpulkan keterangan dari titik(
A,B)
dengan mempertimbangakan bahwa semua titik-titik( )
x,y mendefinisikan garis yangsama dalam ruang
(
A,B)
tersebut. Dimana, jika himpunan titik-titik kolinear{
(
x ,i yi)
}
mendefinisikan garis
(
A,B)
, maka 0 1= + + i i Bx Ay (2.3)Persamaan ini dapat dilihat sebagai sebuah sistem dan dapat dituliskan secara sederhana dalam parameter kartesius sebagai
i im y x
c=− + (2.4)
Maka untuk menentukan garisnya kita harus menemukan nilai-nilai dari parameter
( )
m,c (atau(
A,B)
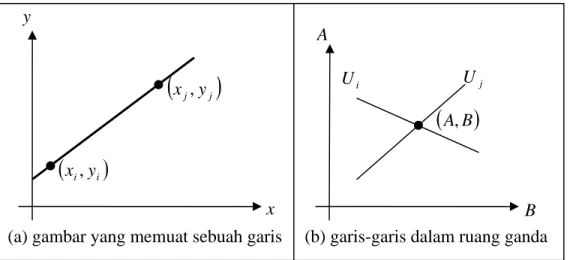
dalam bentuk yang homogen) yang memenuhi persamaan (2.4) (atau (2.3)).Hubungan antara sebuah titik
(
x ,i yi)
dalam sebuah gambar dan garis dalam persamaan (1.4) digambarkan dalam grafik dibawah ini.Gambar 2.4 Ilustrasi Transformasi Hough untuk Garis
Poros dalam ruang ganda mewakili parameter-parameter dari garis. Dalam parameter kartesius m memiliki nilai yang tak terbatas, karena garis dapat berbentuk vertikal ataupun horisontal. Karena pemilihan dilakukan dalam himpunan diskrit, maka
(
x ,j yj)
x y(
x ,i yi)
i U U j(
A,B)
B Ahal ini dapat mengakibatkan bias errors. Batasan pemilihan dapat ditentukan dalam ruang akumulator yang melingkupi semua kemungkinan nilai. Hal ini berhubungan dengan teknik anti penggandaan dan dapat mengembangkan strategi pengumpulan informasi (Brown, 1983), (Kiryati, 1991).
Perlu diperhatikan bahwa persamaan (2.4) tidak cocok untuk implementasi karena parameter-parameternya memiliki nilai yang tak terbatas. Untuk mengatasi ketidakterbatasan nilai c, kita menggunakan dua himpunan (array). Saat nilai gradien
m berkisar diantara -45° dan 45°, maka nilai c tidak terlalu luas. Untuk nilai m diluar kisaran tersebut nilai c dapat menjadi sangat luas. Oleh karena itu dipertimbangkan sebuah akumulator untuk setiap kasus. Dalam kasus yang ke dua, digunakan sebuah himpunan yang menyimpan nilai konstanta tersebut dengan sumbu x.
Kita dapat melihat bahwa TH memberikan respon yang tepat. Namun, tidak linear dan diskritnya nilai parameter menghasilkan akumulator-akumulator yang tidak jernih. Masalah utama dalam implementasi TH dasar untuk garis adalah definisi ruang akumulator yang sesuai.
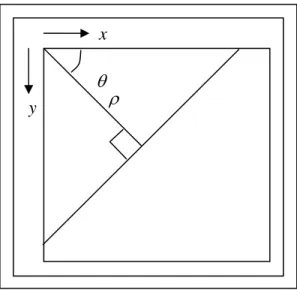
Satu cara untuk mengatasi masalah penggunaan parameter kartesius untuk TH yaitu dengan mendasarkan fungsi pemetaan pada parameter alternatif. Teknik yang paling terbukti ketepatannya dikenal dengan foot-of-normal parameterisation. Teknik ini memformulasikan sebuah garis dengan menentukan titik
( )
x,y sebagai fungsi dari sebuah sudut normal terhadap garis, melewati daerah dari gambar. Ini memberikan bentuk dari TH untuk garis yang dikenal dengan polar Hough Transform for lines (Duda, 1972). Titik dimana garis ini berpotongan dengan garis pada gambar diberikan sebagaiθ θ
ρ = xcos + ysin (2.5)
dimana θ adalah sudut yang dibentuk oleh garis normal dengan garis pada gambar dan
ρ adalah jarak antara daerah dan titik dimana garis-garis tersebut berpotongan.
Gambar 2.5 Penentuan Polar Sebuah Garis
Dengan mengetahui bahwa dua buah garis dinyatakan tegak lurus jika hasil kali dari kemiringannya adalah -1, dan mempertimbangkan bentuk bangun pada gambar di atas, maka didapatkan
θ ρ sin = c θ tan 1 − = m (2.6)
Dengan susbtitusi pada persamaan (2.1) diperoleh bentuk polar pada persamaan (2.5). Hal ini memberikan fungsi pemetaan yang berbeda dalam bentuk sinusoidal. Keuntungan dari pemetaan alternatif ini yaitu nilai dari parameter-parameter θ dan ρ
sekarang memiliki batas rentang yang spesifik. Rentang dari ρ adalah 180°; nilai-nilai kemungkinan ρ tergantung pada ukuran dari gambar, karena panjang maksimal sebuah garis adalah 2×N, dimana N adalah luas permukaan gambar. Rentang nilai-nilainya sekarang telah ditentukan, sehingga teknik ini dapat digunakan.
x
y
θ
Himpunan akumulatornya merupakan himpunan nilai θ dari 0 sampai 180°, dan
untuk ρ dari 0 sampai N2 +M2 , dimana N×M adalah ukuran gambar. Kemudian, untuk titik-titik yang bernilai lebih besar dari rentang yang telah ditentukan, sudut yang berhubungan dengan himpunan akumulator akan dievaluasi (sebagai radian dengan rentang 0 sampai π ) dan kemudian nilai dari ρ dievaluasi dari persamaan (2.5) dan sel akumulator yang sesuai ditambahkan menurut parameter yang masih berada dalam rentang yang ditentukan. Pada gambar ditunjukkan hasil yang lebih jernih jika dibandingkan dengan parameter kartesius sebelumnya. Hal ini disebabkan karena berkurangnya efek kediskritan pada parameter polar sehingga memungkinkan implementasi polar lebih dapat dipraktekkan.
2.6.2 Transformasi Hough untuk Lingkaran
TH dapat diperluas dengan mengganti persamaan kurva pada proses pengenalan. Persamaan kurva dapat diberikan dalam bentuk eksplisit atau parametrik. Dalam bentuk eksplisit, TH dapat didefinisikan dengan megingat persamaan untuk lingkaran sebagai
(
) (
)
2 2 0 2 0 y y r x x− + − = (2.7)Persamaan ini mendefinisikan posisi titik-titik
( )
x,y memiliki pusat di daerah(
x0, y0)
dan radius r . Persamaan ini dapat pula divisualisasikan dalam dua cara: sebagai posisititik-titik
( )
x,y dalam sebuah gambar, atau sebagai posisi titik-titik(
x0,y0)
yang berpusat pada( )
x,y dengan radius r .Persamaan (2.7) dapat didefinisikan dalam bentuk parametrik sebagai berikut
θ
cos 0 r
x
Representasi ini memungkinkan kita untuk mendapatkan parameter-parameternya. Dengan demikian, pemetaan TH menjadi
θ
cos 0 x r
x = − y0 = y−rsinθ (2.9)
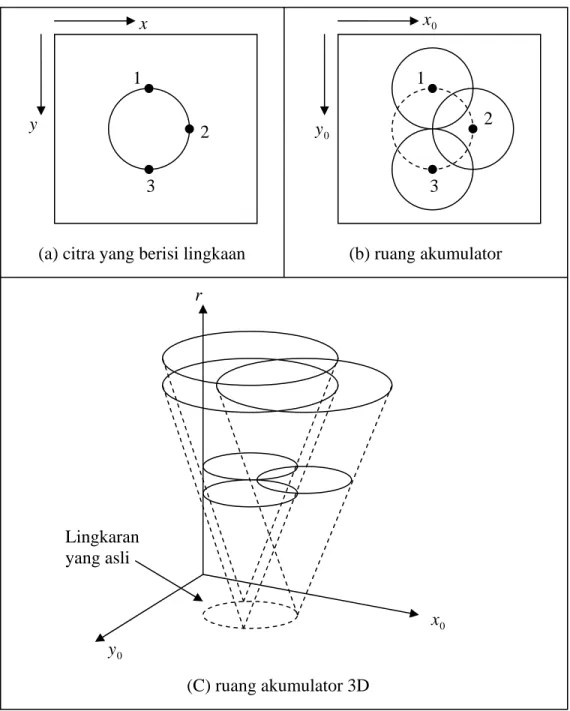
Persamaan-persamaan tersebut mendefinisikan titik-titik pada ruang akumulator (pada gambar 2.6(b)) bergantung pada nilai radius r . Perlu dicatat bahwa θ bukan
parameter bebas, tetapi mendefinisikan jejak kurva. Jejak kurva (atau permukaan) umumnya dikenal sebagai point spread function (fungsi penyebaran titik).
Gambar 2.6 Ilustrasi TH untuk Lingkaran
Pada gambar ilustrasi dapat dilihat bahwa TH untuk lingkaran mampu mentoleransi gangguan-gangguan (noise). Perlu dicatat bahwa kita tidak lagi mendapati masalah pada penentuan titik awal dan akhir garis, karena lingkaran merupakan sebuah
1 2 3 x y 0 y 1 2 3
(a) citra yang berisi lingkaan (b) ruang akumulator
0 y 0 x r (C) ruang akumulator 3D Lingkaran yang asli 0 x
bangun tertutup. Pada contoh ke tiga, terdapat banyak titik yang mengimplikasi adanya penambahan waktu proses. TH akan mendeteksi lingkaran selama ada lebih banyak titik-titik di dalam daerah sirkular yang dapat dipaparkan dengan parameter-parameter dari lingkaran target dibandingkan dengan lingkaran-lingkaran yang lainnya. Ini merupakan performa yang tepat sama dengan TH untuk garis, seperti yang diharapkan, dan juga konsisten dengan hasil dari pencocokan pola.
2.7 Gelombang Gabor
Gelombang merupakan pendekatan awal perbandingan untuk pemrosesan sinyal. Kelebihan utamanya adalah memungkinkan analisis dengan multi resolusi (analisis dengan berbagai skala, atau resolusi). Lebih dalam lagi, gelombang memungkinkan pendesimalan dalam ruang dan frekuensi secara simultan. Transformasi-transformasi sebelumnya sebenarnya memungkinkan pendesimalan dalam frekuensi. Dalam hal ini, transformasi Fourier memberikan ukuran dari frekuensi keseluruhan gambar.
Pendesimalan simultan memungkinkan kita untuk menjelaskan sebuah gambar dalam hubungannya dengan frekuensi yang terjadi pada suatu posisi, seperti yang ditentang pada sebuah kemampuan untuk mengukur frekuensi gambar keseluruhan.
Pertama-tama dibutuhkan sebuah fungsi dasar, agar kita dapat menguraikan sinyal. Fungsi-fungsi dasar dalam transformasi Fourier berbentuk gelombang sinusoidal
pada frekuensi yang berbeda. Gelombang Gabor dinyatakan sebagai
( )
(( (( )))) ⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ −=
2 0 2 0 log 2 log f f fe
f
G
σ (2.10)dimana f adalah frekuensi antara 0 sampai 0.5, f adalah frekuensi modulasi, dan 0 σ
merupakan standart deviasi dari gaussian.
Suatu pendekatan telah menyamaratakan fungsi Gabor ke dalam bentuk dua dimensi dengan tujuan optimalisasi.
( )
[
( ) ( )]
[ 0( 0) 0( 0)] 2 2 0 2 2 0 2,
y
e
x x y ye
iu x x v y yx
G
=
−π − α + − β − π − + − (2.11)dimana x , 0 y menunjukkan posisi,. Secara alami, bentuk permukaan yang ditentukan 0
oleh fungsi Gaussian dua dimensi berupa elips jika berbagai varian digunakan sepanjang
sumbu-sumbu x dan y (frekuensinya juga dapat dimodulasikan dengan berbeda
sepanjang masing-masing sumbu).
Fungsi transformasi gelombang adalah untuk menentukan dimana dan bagaimana masing-masing gelombang dispesifikasikan oleh rentang nilai untuk setiap parameter bebas yang terdapat pada gambar. Namun bagaimanapun, kondisi-kondisi dimana suatu himpunan gelombang Gabor yang kontinu akan menghasilkan perwakilan lengkap dari
gambar baru saja dikembangkan. Aplikasi-aplikasi gelombang Gabor antara lain: sistem
sekuritas dengan menggunakan analisa iris mata dan ekstraksi bagian-bagian wajah untuk pengenalan wajah otomatis.
Quadrature 2D Gabor Wavelets dinyatakan sebagai:
{ }= { }
∫ ∫
ρ φ(
ρ φ)
−ω(θ −φ) (− −ρ) α −(θ −φ) β ρ∂ρ∂φ 2 2 0 2 2 0 0 , sgn Re,Im Im Re, I e e e h i r (2.12) dimana: • Re( )
h ≥0.0≡1 • Re( )
h <0.0≡0 • Im( )
h ≥0.0≡1 • Im( )
h <0.0≡02.8 Metoda Hamming Distance
Metode ini mencari jumlah karakter atau jumlah bit yang berbeda antara dua string yang memiliki panjang yang sama. Contohnya:
• Hamming Distance antara 1011101 dan 1001001 adalah 2 • Hamming Distance antara 2143896 dan 2233796 adalah 3 • Hamming Distance antara “toned” dan “roses” adalah 3
2.9 Discrete Fourier Transform (Transformasi Fourier Diskrit)
Transformasi Fourier Diskrit (TFD) yang dapat diaplikasikan untuk
gambar-gambar digital, didefinisikan dalam persamaan (2.12). Dasar dari suatu himpunan gambar N×N dengan nilai intensitas yang sesungguhnya harus memiliki basis vektor
2
N . Hal-hal ini ditentukan oleh sepasang parameter frekuensi u, v, dengan rentang nilai 0 hingga N-1, yang akan kita gunakan dalam rumusan berikut ini.
2.9.1 Definisi
TFD mentransformasikan suatu gambar dari contoh ruang N×N , I ,
[ ]
x y menjadi array N×N , F ,[ ]
u v dari koefisien yang digunakan dalam gambaran frekuensinya[
]
∑ ∑
−[
]
( ) = − = + −≡
1 0 1 0 2,
,
N x N y yv xu N je
y
x
I
v
u
F
π (2.13)Untuk menghitung elemen daerah frekuensi tunggal (piksel) F ,
[ ]
u v kita perlu melakukan perkalian dot product antara keseluruhan gambar I ,[ ]
x y dan bayangan[ ]
x yEu,v , , yang biasanya tidak benar-benar dibuat, tapi terhitung secara implisit dengan syarat-syarat pada u, v dan fungsi cos dan sin yang diperlukan. Selain itu juga didefinisikan suatu transformasi invers untuk mentransformasikan sebuah gambaran daerah frekuensi F ,
[ ]
u v menjadi sebuah gambar ruang I ,[ ]
x y .TFD untuk dimensi satu adalah
( )
(
)
,
0
1
1 0 2−
≤
≤
=
∑
− =N
n
e
k
a
n
u
N k N kn j π (2.14)dimana:
( )
n[
x( ) ( )
n y n]
u = , untuk n=0,1,2,...,N−1
2.9.2 Invers dari Transformasi Fourier Diskrit (ITFD)
ITFD mentransformasikan gambaran frekuensi N×N , F ,
[ ]
u v menjadi contoh ruang gambar N×N, I ,[ ]
x y .[
]
∑ ∑
−[ ]
(
)
= − = +≡
1 0 1 0 2,
1
,
N u N v vy ux N je
v
u
F
N
y
x
I
π (2.15)Jika F ,
[ ]
u v dihitung dengan transformasi I ,[ ]
x y pada posisi awal, maka hasil invers transformasinya seharusnya dapat kembali ke gambar awalnya. Hal ini berlaku untuk kedua persamaan di atas. Untuk penyimpanan atau komunikasi dari gambar, akan lebih berguna jika ditransformasikan menjadi gambaran frekuensi; gambar input dapat diperoleh dengan menggunakan transformasi invers. Dalam proses pengolahan gambar, sudah umum dilakukan operasi perbaikan pada gambaran frekuensi sebelum ditrnsformasikan kembali untuk mendapatkan gambaran ruangnya. Sebagai contoh, frekuensi-frekuensi ynag tinggi dapat dikurangi atau bahkan dihilangkan dengan mengurangi, atau me-nol-kan, elemen-elemen dari F ,[ ]
u v yang mewakili gelombang frekuensi tinggi.Untuk dimensi satunya dijabarkan sebagai berikut
( )
1
( )
,
0
1
1 0 2−
≤
≤
=
∑
− = −N
n
e
n
u
N
k
a
N n N kn j π (2.16)2.10 Pendeteksian Tepi (Edge Detection)
Titik tepi (edge point) merupakan sebuah titik dalam suatu citra dengan koordinat
[ ]
i,j yang terletak pada perubahan intensitas warna dalam citra tersebut. Fragmen tepi berhubungan dengan koordinat tepi[ ]
i,j dan orientasi dari tepi θ , di mana dapat berupa sudut gradien. Pendeteksian tepi merupakan suatu algoritma yang memproduksi kumpulan tepi-tepi (titik tepi atau fragmen tepi) dari sebuah citra.Langkah-langkah pendeteksian tepi: 1. Penyaringan (Filtering)
Perhitungan gradien dilandasi oleh nilai-nilai intensitas dari dua titik yang mudah terkena gangguan dan tingkah lainnya dalam perhitungan diskrit, filtering digunakan untuk meningkatkan pendeteksian tepi yang peka terhadap gangguan. Semakin banyak filtering dilakukan untuk mengurangi gangguan akan bertampak pada berkurangnya kekuatan tepi.
2. Perbaikan (enhancement)
Untuk memfasilitasi pendeteksian tepi, penting untuk menentukan perubahan intensitas pada titik-titik sekitarnya. Perbaikan menekankan piksel-piksel, dimana terjadi perubahan yang cuup besar pada nilai intensitas lokal dan biasanya ditunjukkan dengan melakukan perhitungan besaran gradien.
3. Lokalisasi (localization)
Jika dibutuhkan untuk aplikasi, lokasi dari tepi dapat diestimasi dengan revolusi subpiksel. Orientasi dari tepi juga dapat diestimasi. Catatan penting, pendeteksian hanya mengindikasikan bahwa letak tepi adalah dekat dengan piksel pada gambar, tapi tidak memberikan perkiraan yang akurat dari lokasi tepi atau orientasinya.
Kesalahan pada pendeteksian tepi adalah kesalahan pengklarifikasian kesalahan tepi dan kehilangan tepi. Kesalahan pada prakiraan tepi disebabkan oleh kesalahan prakiraan pengalokasian dan orientasi dari probabilitas distribusi. Pembedaan antara pendeteksian tepi dan prakiraannya dikarenakan langkah-langkah pendeteksian dan prakiraan ini ditunjukkan dari kalkulasi yang berbeda dan memiliki model kesalahan yang berbeda.
2.11 Use Case Diagram
Use case adalah satu set dari skenario yang dikumpulkan bersama-sama oleh
hasil dari pengguna yang biasa terjadi. Use case diagram menggambarkan fungsi dari sebuah sistem menggunakan aktor dan use cases. Use case merupakan pelayanan atau fungsi yang dimiliki oleh sistem untuk penggunanya. Tujuan dari pembuatan use case ini adalah:
1. untuk memecah-mecah permintaan dari pengguna menjadi beberapa bagian yang memiliki kesatuan arti
2. sebagai dasar dalam perencanaan konstruksi 3. sebagai basis untuk mencoba system
Aktor Use Case 1 Use Case 2 Use Case 3
Sistem
• SistemGambarkan batasan sistem menggunakan segi empat yang berisi beberapa use case. Letakkan actor diluar dari batasan sistem.
• Use Case
Gambarkan use case dengan elips. Isikan dengan kata-kata yang menggambarkan fungsi-fungsi dari sistem.
• Aktor
• Hubungan
Ilustrasikan hubungan-hubungan antara aktor dan use case dengan menggunakan sebuah garis. Untuk hubungan antar use case, gunakan panah yang diberi label “uses” atau “extends”. Hubungan “uses” menunjukan use case yang satu dibutuhkan oleh use case yang lain dalam menjalakan sebuah tugas. Hubungan “extends” menunjukan jalan lain yang bisa dipilih.
2.12 Activity Diagram
Sebuah Activity Diagram memperlihatkan sebuah sistem yang dinamis dengan cara menggambarkan alur kontrol dari aktifitas ke aktifitas. Sebuah aktifitas menggambarkan sebuah operasi dalam kelas yang ada di sistem dimana hasilnya sebuah perubahan status dari sebuah sistem. Tujuan dari pembuatan activity diagram ini adalah: 1. untuk menggambarkan tingkah laku dengan struktur control
2. dapat memperlihatkan kegunaan-kegunaan dari objek, objek dalam satu use case atau implementasi dari fungsi
3. mendorong tingkah laku yang berjalan bersamaan
• Status Aksi
Status aksi menunjukkan objek suatu aksi yang tidak bisa diganggu. Status aksi dapat digambarkan dengan segi empat yang keempat sisinya melingkar.
• Alur Aksi
Panah dari alur aksi menggambarkan hubungan antara status aksi.
• Alur Objek
Alur objek menunjuk ke pembuatan dan perubahan sebuah objek oleh aktifitas. Sebuah panah alur objek mengartikan sebuah aksi membuat atau mempengaruhi sebuah objek. Panah alur objek dari sebuah objek ke sebuah aksi menggambarkan status aksi menggunakan objek.
• Status Awal
Sebuah lingkaran yang isinya berwarna hitam dan diikuti oleh sebuah panah menggambarkan status awal dari aksi.
• Status Akhir
Sebuah panah yang diarahkan ke sebuah lingkaran yang didalamnya terdapat lingkaran menggambarkan status akhir dari aksi.
Activity
Activity
Activity
• Percabangan
Sebuah bentuk seperti belah ketupat menggambarkan sebuah pilihan dengan jalan lain. Panah harus diberi label sebuah kondisi. Bisa juga salah satu panah diberi label “else”.
2.13 Database
Menurut Turban (2003, p135), suatu organisasi harus dapat mengumpulkan, mengorganisasi, menganalisa, dan menginterprestasikan data agar dapat bertahan dalam persaingan yang ketat pada global market, dan manajemen data sangat vital untuk semua fungsi bisnis.
Menurut Turban (2003, p139), database adalah sekumpulan file-file yang saling berkaitan, dapat menghilangkan masalah yang berkaitan dengan suatu traditional file
environment.
[condition]
2.14 Borland Delphi
Menurut StrawberryFrog (2001), Borland Delphi versi 1.0 pertama kali diperkenalkan pada hari Valentine tahun 1995. Pada tahun itu, lingkungan pengembangan yang banyak digunakan Microsoft Windows adalah Microsoft Visual Basic dan Microsoft C++. Pembuatan Borland Delphi bertujuan untuk memberikan kemudahan kepada para programmer dalam pembuatan program secara visual, dengan cara menggabungkan kemudahan penggunaan lingkungan dari Visual Basic dan ketangguhan dari Microsoft C++ yang berorientasi objek.
Arsitek utama dari 3 versi pertama Borland Delphi adalah Anders Hejsberg. Setelah itu dia bergabung dengan Microsoft dan menciptakan suatu set class untuk Java yang disebut WFC (Windows Foundation Classes). Project selanjutnya adalah bahasa C#, yang mirip dengan Java tetapi menggunakan ide yang bergaya Delphi.
2.15 MATLAB
MATLAB merupakan sebuah bahasa pemrograman komputer dan sekaligus sebuah perangkat lunak yang dapat menjalankan bahasa pemrograman tersebut. MATLAB ini dikembangkan dan dijual oleh The MathWorks, Inc. dari Natick, Massachusetts, dan sudah tersedia untuk Microsoft Windows dan komputer system yang lain. Lingkungan interaktif dari MATLAB ini memungkinkan kita untuk mengelola
variables, import dan export data, melakukan perhitungan, menghasilkan diagram, dan
mengembangkan dan mengatur file-file yang akan digunakan oleh MATLAB. Bahasa pemrogramannya dikembangkan pada tahun 1970an untuk aplikasi-aplikasi yang melibatkan matriks, aljabar linier dan analisis angka (Nama MATLAB singkatan dari “Matrix Laboratory”). Bahasa pemrogramannya sudah diuji dengan baik dan diperbaiki
terus dari tahun ke tahun dalam penggunaannya serta kemampuannya sudah berkembang pesat.
2.16 Penelitian Relevan
Penelitian-penelitian yang pernah dilakukan peneliti lain yang berhubungan dengan penelitian yang terkait dengan penulisan skripsi ini adalah sebagai berikut:
a. Experiments On Human Iris Recognition Using Error Backpropagation Artificial Neural Network, 2004, Paulo Eduardo Merloti. Menggunakan Algoritma
Backpropagation dalam membuat sistem pengenalan iris mata.
b. A Fast Circular Edge Detector for the Iris Region Segmentation, 2000, Yeunggyu Park, Hoonju Yun, Myongseop Song, and Jaihie Kim. Mereka menerapkan pencarian tepi untuk mengambil iris mata dari citra.
c. Penentuan Posisi Target Secara Otomatis Menggunakan Transformasi Hough, Harintaka, Djurdjani. Mereka menggunakan Transformasi Hough dalam mencari posisi titik pusat target.