TUGAS AKHIR (OE 1701)
SIMPUFIKASI ANAUSA AESPONS
DtNAMIS GERAKAN SEMI-SUBMERSIBLE
~Slo~
(, ?-7
98
l
CATAMARAN HUll 01 ATAS
GELOMBANG AEGULE
Oleh :
PROGRAM
STUDI TEKNIK KELAUTAN
FAKULTAS
TEKNOLOGl
kELAUTAN
INSTITUT TEKNOLOGI SEPULUH
NOPEMBER
SURABAYA
LEMBAR PENGESAHAN
,--~---'"'
-~-.._..______________
) "-..
OR.
Jr.
Eko B. Djatmiko, MSc.
ABSTR4K
Semi-Submersible Catamaran Hull {SSCH} yang dipakai untuk aktifitas telmik dalam industri bangunan lepas pantai menuntut gerakan kecil. Tuntutan demikian dimaksudkan untuk menghindari ganggguan terhadap kelancaran operasi di atas bangunan lepas pantai, termasuk juga kenyamanan bagi pekerja.. Untuk mengetahui besar kecilnya gerakan SSCH tersebut perlu dilakukan analisa dinamis.
Dalam melakukan analisa dinamis tersebut, dipakai simplifikasi dalam penyelesaian persamaan gerakan SSCH, terutama dalam pengambilan
koefisien-koefisien hidrodinamis yang didasarkan pada hasil eksperimen. Program komputer kemudian ditulis untuk mengakomodasi model matematis gerakan SSCH di atas gelombang reguler.
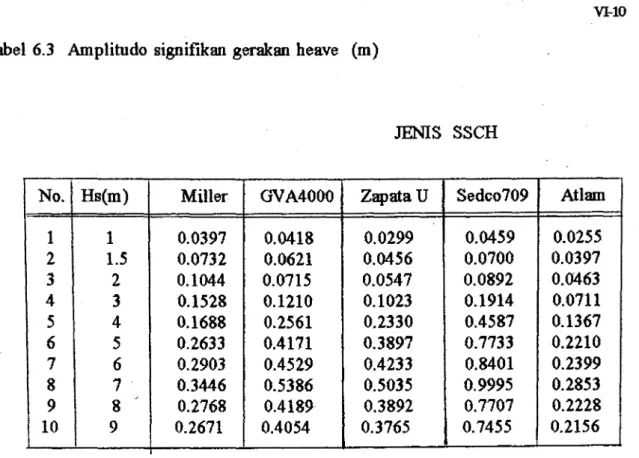
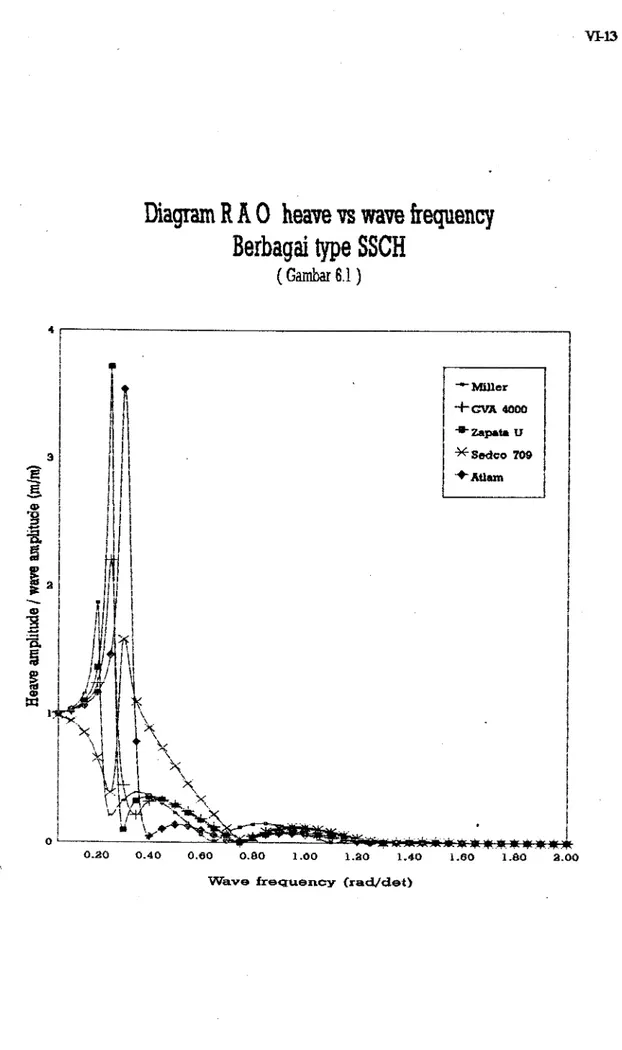
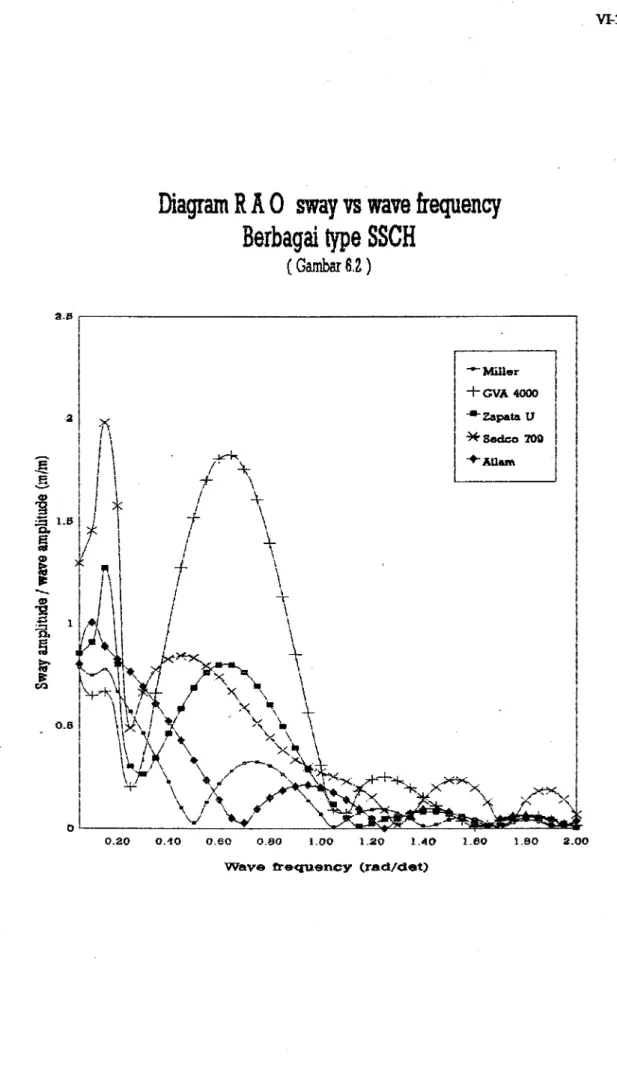
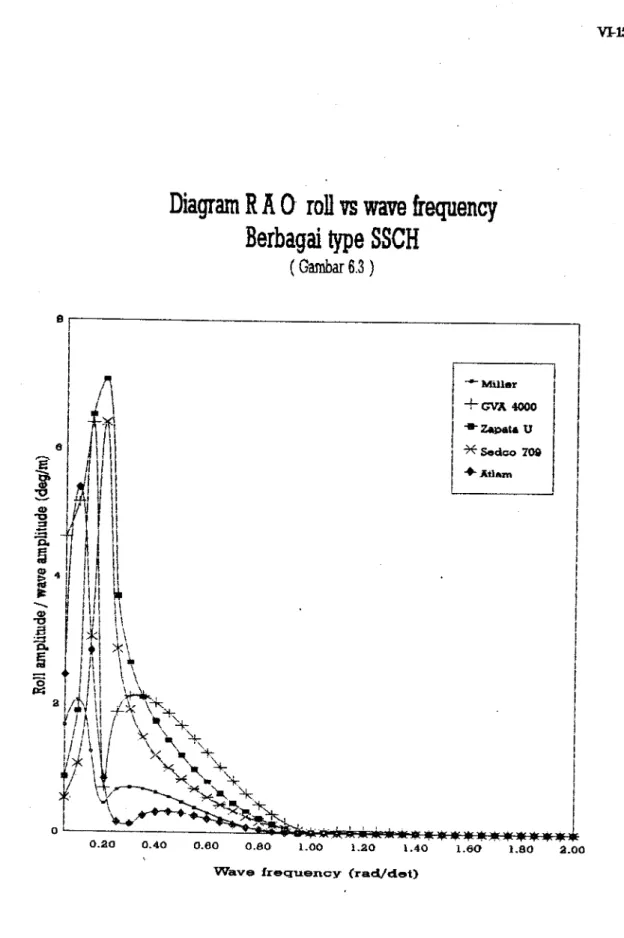
Selanjutnya, studi kasus analisa dinamis dilakukan dengan, pertama mengadakan studi perbandingan RAO. Lima SSCH telah dikaji dalam studi ini dan SSCH Sedco709 mempunyai karakteristik gerakan yang baikuntuk Heave dan Pitch, sedang SSCH Miller untuk gerakan Sway dan Roll. Kedua, melakukan studi parameter SSCH Dalam studi ini dipakai SSCH Miller dan program komputer diterapkan untuk mempermudah proses perhitungan RAO. Sebagai contoh studi, dengan bertambahnya diameter column, RAO heave, roll dan pitch akan semakin naik pada frekuensi gelombang rendah (daerah resonansi}, dan sebalilmya pada frekuensi gelombang tinggi cenderung menu run. Di lain pihak RAO Sway baik pada
frekuensi gelombang rendah maupun tinggi respommya mengalci.mi penurunan. Ketiga, mengetahui perilaku SSCH pada laut yang sebenamya, gelombang !aut dianalisis dengan memakai spektra Jonswap. Dari perilaku SSCH di lautan nampak
KA
TA PENGANTAR
Bismillahirrohmanirrohim,Dengan mengucap syukur Alhamdulillah kepada Alloh SWT, karena dengan
limpahan rahmat, hidayah dan karuniaNya, penulis dapat menyelesaikan Tugas Akhir
ini. Tugas Akhir ini dibuat sebagai syarat utama dalam menempuh gelar kesarjanaan
pada Teknik Kelantan, Fakultas Teknologi Kelantan, Institut Teknologi Sepuluh
November Surabaya
Padakesempatan ini penulis mengucapkan terimakasih yang setulus-tulusnya
kepada:
1. Orang tua dan Sandara-saudaraku yang selalu memberikan dorongan dan
semangat, baik moril maupun materiil hingga selesainya Tugas Akhir ini.
2 . Ir. Eko Budi Djatmiko, M.Sc, Ph.D, selaku Kajur Teknik Kelautan dan
Dosen Pembimbing Tugas Akhir.
3. lr. Ashar Imron, M.Sc, M.SE, PED, selaku Ka Lab. Komputasi FI'K ITS. 4. Ir. Hartanta Tarigan, M.Sc, Ph.D, selaku Dosen Wali.
5. Konco-koncoku "OFFSHORE" angkatan '86, '87, '88, '89, '90 dan semua
pihak yang tidak dapat penulis sebutkan.
Penulis menyadari basil penulisan ini masih jauh dari kesempumaan, oleh
karena itu kritik dan saran sangat penulis harapkan. Akhir kata, semoga tulisan ini
dapat bermanfaat bagi pemerhati bidang hidrodinamika & dinamika BLP.
DAFfAR lSI
Hal
LEMBAR nJDUL ... .i
LEMBAR P:EN"GESAIIAN" ... .ii
ABS'IRAK. ... iii
KATA PEN"GANTAR ... iv
DAFfAR ISI. ... v
DAFfAR NOTASI. ... : ... vi
DAFfAR G.AMBAR ... vii
BAB I P:EN'DAif(JLU~ ... .I-1 1.1 Latar Belakang ... .I -1
1.2 Tujuan Penulisan ... .l-4
1.3 Batasan Masalah ... .I-5
1.4 Metodologi Penelitian ... .I-5
BAB II KONSEP GAYA-GAYA IDDRODINAM1S PADA BANGUNAN LEPAS
PANTAI AKIBAT GELOMBANG REGULER ... II-1
II.l
Gaya-gaya Hidrodinamis Pada Bangunan Lepas Pantai ... II-1 11.1.1 Gaya Viskus ... TI-2II.l.2.1 GayaPengembali Hidrostatik ... II-4
II.1.2.2 GayaHidrodinmnik ... c • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • II-5
II.l.2.1.a Gay a Inersia Hidrodinmnik ... II
-5
II.1.2.1.b Gaya Kecepatan Hidrodinmnik atan Gaya Redmnan ... II-6
II.l.2.l.c Gaya Eksitasi Gelombang atan Wave Induced Forced. .. II-7
11.2 Konsep Massa Tmnbah ... Il-9
II.3 Gaya Body Akibat Inersia Fluida ... II-18
BAB ill MODEL SISTEM DERAJAT KEBEBASAN SEMI-SUMERSIDLE CATAMARANHULL ... III-1
III.1 Sistem SatuDerajatKebebasan ... ill -1 III.2 Sistem EnmnDenyatKebebasan ... ill -8 III.3 PersmnaanGerakSemi-SubmersibleCatmnaranHull ... .III-14
BAB IV MODEL MATEMATIS RESPONS GERAKAN SEMI-SUBMERSIBLE
CATAMARANHULL 1ERHADAP GELOMBANGREGULER ... .IV-1
IV.l Sistem KoordinatSSCH ... .IV-1
IV.2 Persmnaan GerakanHeaveDalmn KondisiBeam Sea ... .IV-3
IV.3. Persamaan Gerakan Kopel Sway dan Roll Dalam Kondisi Beam Sea. . .IV-8
IV.3.1 GayaEksitasi Gelombang Untuk Gerakan Sway ... .IV-8
IV.3.2 MomenEksitasi GelombangUntuk GerakanRoll ... .IV-9
IV.3.3 KopelGayaSwaydanMomenRoll ... .IV-12
IV.4 Persamaan Gerakan Pitch Dalam Kondisi Head Sea ... .IV-15
IV.5 Program Untuk Perhitungan Respons Dinamis Gerakan SSCH ... .IV-19
IV.5.1 Simbul PadaProgram ... .IV-20
IV.5.2Diagram AlirProgram ... IV-26
BAB V GERAKAN SEMI-SUBMERSIBLE CATAMARAN HULL
DI LAUTAN" ... V-1
V.1 Karnkteristik GelombangAcak (Random) ... V-1
V.2 Spektrum Energi Gelombang ... V-3
V.3 Formulasi Spektrum Gelombang Jonswap ... V-9
V.4 Spektra Gerak Semi-Submersible Catamaran Hull Pada Gelombang
Acak ... V-11
BAB VI ANALISA HASIL DAN PEMBAHASAN" ... VI-1
VI. 1 Studi Perbandingan Respons Din am is Gerakan SSCH ... VI -1
VI.2 StudiParameterSSCH ... .VI-5
VI.3 Spektmm GerakanSSCH ... VI-8
BAB VII KESIMPULANDAN SARAN ... VII-1
VII.l Kesimpulan ... VII-1
VIL2 Saran ... VII-2
LAMP IRAN
A Program Komputer
B Input dan Output Program Komputer Bl. Input Program Komputer
B2. Output Program Komputer SSCH Miller C Studi Parameter SSCH
D Spektra Gelombang dan Spektra Gerakan SSCH
DAFrAR GAMBAR
Hal Gbr. 1.1 Berbagai type stmktur Semi-Submersible Catamaran Hull.. ... .I-3
Gbr. 2.1 Diagram semua gaya dan mom en fluida yang terjadi pada body
karena gelombang ... .II-3
Gbr. 2.2 Sistem sumbuuntukformulasimassatambah ... II-10
Gbr. 2.3 Evaluasimassatambah silinder ... II-14 Gbr. 2.4 Benda yang bergerak dalam fluidadengan percepatan konstan ... II-18
Gbr. 3.1 Kurva kategorisasi perilaku respons ... ill-7 Gbr. 3.2 De:fmisi enam derajat kebebasan padafree floating body ... ill-9
Gbr. 3.3 Blok diagram dari N sistem yang masing-masing mempunyai satu sistem derajat kebebasan ...
m
-9 Gbr. 3.4 Blok diagram dari satu sistem dengan N derajat kebebasan ... .III-10Gbr. 4.1 Sistem koordinat SSCH pada kondisi beam sea ... IV -2
G'br. 4.2 Sistem koordinat SSCH padakondisi head sea ... .IV -2
Gbr.4.3 Koefisien massa tambah ... IV-5
Gbr. 5.1 Rekaman gelombang: analisapuncak dan lembah ... V-3
Gbr. 5.2 Definisi Spektrum energigelombang ... V-4
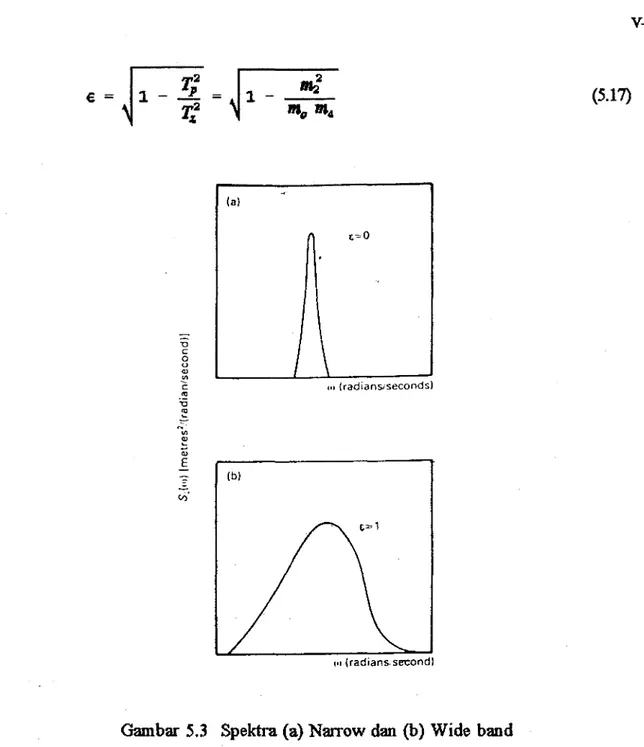
Gbr. 5.3 Spektranarrowdan wide band ... V-8
Gbr. 6.1 Diagram RAO heavevs wave frequency berbagai type SSCH. ... VI-13
Gbr. 6.2 Diagram RAO sway vs wave frequency berbagai type SSCH ... VI-14
Gbr. 6.3 Diagram RAOroll vswave frequency berbagai type SSCH. ... VI-15
Gbr. 6.5 Diagram RAO heave vs wave frequency karena perbedaan
diameterkolom SSCH-Miller ... VI-17 Gbr. 6.6 Diagram RAO sway vs wave frequency karena perbedaan
diameter kolom SSCH-Miller ... VI-18 Gbr. 6. 7 Diagram RAO roll vs wave frequency karena perbedaan
diameter kolom SSCH-Miller ... VI-19 Gbr. 6.8 Diagram RAO pitch vs wave frequency karena perbedaan
diameter kolom SSCH-Miller ... VI-20 Gbr. 6.9 Diagram spektrum energigelombangHs=3 -6m ... VI-21 Gbr. 6.10Diagram spektrum gerakanheave SSCHMillerHs=3 -6m.: ... VI-22 Gbr. 6.11 Diagram spektrum gerakan pitch SSCH Miller Hs = 3 -6 m ... VI-23 Gbr. 6.12 Diagram spektrum gerakan roll SSCH Miller Hs = 3 - 6 m ... VI-24 Gbr. 6.13 Diagram spektrum gerakan heave berbagai type SSCH padaHs =
5 ...
VI-25 Gbr. 6.14 Diagram spektrum gerakan pitch berbagai type SSCH padaHs=
5 m.VI-26Gbr. 6.15 Diagram spektrum gerakan roll berbagai type SSCHpadaHs= 5 m .... VI-27 Gbr. 6.16 Diagram significant heave amplitude vs significant wave height
berbagai type SSCH ... :, ... : ... VI-28 Gbr. 6.17 Diagram significant pitch amplitude vs significant wave height
berbagai type SSCH ... VI-29 Gbr. 6.18 Diagram significant roll amplitude vs significant wave height
',
DAFfAR NOTASI
A - massa tam bah hidrodinamis (massa mom en inersia)
A,. -
matrik massa tam bah yang terdiri dari massa tambah dan massa momen inersia per satuan percepatanA,. -
massa tambah swayA. -
massa tambah heaveA. - water plane area pada body
B - damping hidrodinamis per satuan kecepatan
B,. - matrik damping gaya damping dan mom en inersia per satuan kecepatan
B,. -
koefisien damping heave B• - koefisien damping rollB8 - koefisien damping pitch
C - koefisien gaya pengembali hidrostatik
c,. -
matrik pengembali hidrostatik yang terdiri dari gaya dan momen pengembali per satuan displasemenc,.., -
koefisien kopel gerakan sway dsn rollE. -
besamya energi gelombang per satuan meter persegi permukaan gelombang, untuk komponen gelombang sinusoidal ke-nFA - gay a inersia hidrodinamis karena pengaruh massa tam bah
F c - gay a pengem bali hidrostatik
F0 - gaya eksitasi gelombang akibat di.ffi:aksi gelombang
F1 - gaya eksitasi gelombang akibat gelombang reguler
FJ - vektor gaya dan momen eksitasi kompleks per satuan amplitudo gel om bang
FJ - amplitudo gaya kompleks
FJIIt - bagian
riil
dari amplitudo gaya kompleksF1 - bagian imaginer dari amplitudo gaya kompleks
F _. -
nilai maksimum gaya eksitasi gelombangF. - gaya eksitasi gelombang (atau lndllcedwmeforce)
Fv - gaya viskous
F,. - total gaya eksitasi gelombang dalam g~an sway
F,. -
total gaya eksitasi gelombang dalam gerakan heaveGM.. -
tinggi metacenter transversal~ - tinggi metacenter longitudinal
Bw -
harga rata-rata daci 1/3 jumlah keseluruhan amplitudo gelombang yang tertinggi18 - momen inersia massa tam bah dalam gerakan pitch
I,. -
mom en inersia massa tam bah dalam gerakan roll J8 - mom en inersia massa dalam gerakan pitchJ., - mom en inersia massa dalam gerakan roll
M - total massa body (atau momen inersia massa)
Mn -
massa bodyM:n -
massa bodyM44 - mom en inersia massa dalam mode roll
(IJ
~ - mom en inersia massa dalam mode pitch
O"s)
M,. -
mom en inersia massa dalam mode yaw (1.)M,.. -
matrik massa yang terdiri dari massa, mom en inersia massa dan basil inersia pada bodyMe -
total momen eksitasi gelombang dalam gerakan pitchM., -
total momen eksitasi gelombang dalam gerakan roll T8 - periode natural pitchT, -
periode natural roll T,. - periode natural heave T. - periode gelombang W - displasem en pada bodyi - unit bilangan kompleks
j - mode exitasi untuk 1, 2, 3, 4, 5, dan 6 masing-masing untuk ~erakan surge, sway, heave, rol~, pitch dan yaw
k - mode gerakan yang mengambil nilai khusus j untuk mode yang bersesuaian
k - angka gelombang s - displasemen
s1 - displasemen dalam mode surge
~ - displasem en dalam mode sway
s4 - displasemen dalam mode roll
s5 - displasemen dalam mode pitch
s, -
displasemen dalam mode yaw~ - vektor displasemen kompleks per satuan amplitudo gelombang
~ - amplitudo displasemen kompleks
s... -
bagian riil dari amplitudo displasemen komplekss,. -
bagian im~iner dari amplitudo displasemen kompleks~ld
-
nilai maksimum displasement - faktor waktu
m - frekuensi radian pada gelombang reguler
CO. -
frekuensi natural pada mode gerakan heaveCDa -
frekuensi natural pada mode gerakan pitch CDy - :frekuensi natural pada mode gerakan rolly - displasemen sway di pusat gravitasi
Y. - amplitudo gerakan sway z - displasemen heave
z. - amplitudo gerakan heave
a; -
phase shift maksimum gaya eksitasi gelombang dari gelombang reguler di titik asal sistem koordinat gelombang" - phase shift maksimum displasemen gerakan dari gelombang reguler
maksimum di titik asal sistem koordinat gelombang
e -
parameter bandwidth• - displasemen anguler pada gerakan roll
fP. -
amplitudo gerakan rolle., -
phase lags gerakan roll8 - displasemen anguler pada gerakan pitch
e. -
amplitudo gerakan pitch1;. -
amplitudo gelombang;.. - kecepatan rata-rata orbital gelombang dalam arab x
BABI
PENDAHULUAN
1.1 IATAR BEIAKANG
Untuk memenuhi kebutuhan explorasi dan penambangan minyak dan gas serta semua jenis mineral di dasar lant, dikenal berbagai jenis bangunan lepas pantai
sebagai sarana penghubungnya. Di antarajenis-jenis bangunan lepas pantai tersebut
adalah Jack-up Rig Platfonn, Concrete Gravity Platfonn, Selt Containned Jacket Template Platfonn, Compliant Guyed Towed, Production Tension Leg Platfonn,
Semi-submersible, dan lain-lain.
K.husus untuk operasi pengeboran di perairan dalam, maka struktur yang
paling banyak digunakan adalah Semi-Submersible. Karena struktur ini relatif stabil
jika ditarik dari satu lokasi ke lokasi yang lain, baik memakai kapal penarik manpun
self propeller. Selain itu struktur ini sangat menguntungkan untuk berbagai aktifitas
kegiatan teknik dalam industri bangunan lepas pantai, seperti ·: Floating Airport,
Offshore Microwave Transmission Station, Accomodation Recreation Park, Scientific
Marine Laboratory dm;t lain-lain.
Bentuk struktur Semi-Submersible ini merupakan bentuk pengembangan dari
bangunan kapal, di mana bentuk umum bangunan ini terdiri dari :
1. Dua buah ponton horizontal.
.1-2
3. Bracing berfungsi menambah ketegaran dari konstruksi.
4. Bangunan atas (deck structure).
Dalam permasalahan ini tubular join banyak terdapat dalam penyambungan
setiap elemen dari bangunan tersebut, karena bentuk material yang digunakan
kebanyakan cylindrical hull. Untuk lebih jelasnya dapat dilihat pada Gbr.
1.1.
dibawah ini:
4·~
~0. b. c.
d. c. f.
q. h. I.
1-3
Untuk memperoleh disain Semi-Submersible yang handal, maka dalam tahap
perencanaan diperlukan persyaratan sebagai berikut :
1. Pengaruh dari aksi gelombang selama beroperasinya Semi-Submersible.
2. Stabilitas statis.
3. Kapasitas untuk beban yang bervariasi.
4. Kekuatan dari konstruksinya
.5. Fasilitas penambatan.
6. Biaya pembuatan dan pengoperasianya
7. Luas dari deck untuk tempat kegiatan operasi dan penempatan peralatan. Di antara aspek atau persyaratan yang akan di bahas dalam analisa tugas akhir
ini adalah pengaruh aksi gel om bang selama beroperasinya Semi-Submersible> karena
gelombang yang mendominasi keseluruhan dari beban bangunan lepas pantai yang
mencapai sekitar 60%, maka disain struktur Semi-Submersible harus cukup kuat
menahan beban gelombang laut yang akan menyebabkan bergetamya bangunan
tersebut. Gerakan struktur yang terlalu besar selain menyebabkan pekeija kurang
nyaman juga menyebabkan kelelahan struktur, sehingga dapat merugikan kegiatan
explorasi dan exploitasi yang seharusnya dapat dilakukan sesuai dengan waktu yang
telah ditentUkan.
Oleh karena itu, diperlukan analisis gerakan Semi~Submersible, untuk mengetahui pengaruh gerakan-gerakan yang'terjadi padastruktur tersebut, dengan cara
mempel~ari respons dinamisnya dengan mengadakan studi perbandingan dari berbagai "Semi-Submersible Catamaran Hull (SSCH)" dan studi pengaruh
14
pada gelombang taut tempat beroperasinya SSCH dengan memakai perumusan dari
respons dinamis dari gelombang reguler.
1.2 BATASAN MASALAH
Untuk lebih mempeijelas permasalahan dan ruang lingkup tugas akhir ini, maka perlu adanya batasan masalah atau asumsi-asumsi sebagai berikut :
1. Memformulasikan gerakan Semi-Submersible di atas gelombang reguler.
2. Tinggi gelombang kecil, sehingga gaya eksitasi gelombang dan gaya redaman karena kecepatan orbital rata-rata gelombang (mean orbital
ve/ocll] ofwme) dalam arab gerakannya dapat diabaikan.
3. Frekuensi gelombang kecil, sehingga koefisien massa tam bah atau massa
mom en inersia massa tam bah konstan tidak tergantung pada frekuensi
gel om bang.
4. Gaya dan mom en eksitasi gelombang dikontribusikan hanya pada
pennukaan bebas gelombang.
5. Pengaruh beban lingkungan laut seperti angin, arus gempadan pasang-surut
diabaikan.
1.3 TUJUAN
Tujuan penulisan tugas akhir ini adalah :
1. Menyusun program komputer untuk perhitungan respons dinamis gerakan
SSCH
2. Mengadakan studi perbandingan response dinamis gerakan SSCH dari
berbagai type.
3. Mempel~ari pengaruh penambahan parameter khusus SSCH terhadap respons dinamisnya
4. Mempel~ari perilaku respons dinamis gerakan SSCH pada taut yang sebenamyadengan memakai perumusan respons dinamis yang didapat dari
gelombang reguler.
1.4 1\tiETODOLOGI PENULISAN
Penulisan tugas akhir ini dilakukan dengan mengadakan penelahaan awal dari
studi literatur mengenai konsep-konsep gerakan yang terjadi pada Semi-Submersible
yang kemudian diadakan penyusunan penulisan dengan langkah sebagai berikut :
1. Perumusan beban gelombang, yaitu gaya-gaya hidrodinamis yang terjadi
pada bangunan lepas pantai untuk gelombang reguler.
2. Menyelesaikan sistem persamaan gerakan SSCH
l-5
1.3 TUJUAN
Tujuan penulisan tugas akhir ini adalah :
1. Menyusun program komputer untuk perhitungan respons dinamis gerilkan SSCH
2. Mengadakan studi perbandingan response dinamis gerakan SSCH dari berbagai type.
3. Mempel~ari pengaruh penambahan parameter khusus SSCH terhadap
respons dinamisnya
4. Mempel~ari perilaku respons dinamis gerakan SSCH pada )aut yang sebenamya dengan memakai perumusan respons dinamis yang didapat dari gelombang reguler.
1.4 :METODOLOGI PENULISAN
Penulisan tugas akhir ini dilakukan dengan mengadakan penelahaan awal dari studi literatur mengenai konsep-konsep gerakan yang terjadi pada Semi-Submersible yang kemudian diadakan penyusunan penulisan dengan langkah sebagai berikut :
1. Perumusan beban gelombang, yaitu gaya-gaya hidrodit:tamis yang terjadi
pada bangunan lepas pantai untuk gelombang reguler. 2. Menyelesaikan sistem persamaan gerakan SSCH
terjadi pada SSCH.
4. Membuat program komputer untuk mempercepat proses perhitungan
respons dinamis gerakan SSCH
5. Membuat spektra gelombang dengan formulasi JONSWAP untuk
memperoleh spektra gerakan SSCH sebagai aplikasi dari respons dinamis
gerakan SSCH pada gelombang reguler.
Sedangkan data-data yang diperlukan dalam perhitungmi ini adalah :
1. Data-data koefisien hidrodinamis yang diperoleh dari model SSCH pada
referensi [1].
2. Data-data dari geometri SSCH yaitu :
1. SSCH Miller pada referensi [7].
2. SSCH Atlam pada referensi [11].
3. SSCH GVA 4000 pada referensi [12].
4. SSCH Zapata Ugland pada referensi [13]
BABll
KONSEP GA YA-GA VA HIDRODINAMIS
PADA BANGUNAN LEPAS PANTAI
AKIBAT GEWMBANG REGULER
Ill GAY A-GAY A HIDRODINAMlS PADA BAN GUN AN LEPAS
PANT AI
Pengenalan dasar atas gerakan pada bangunan lepas pantai dapat dipelajari
dari kasus sebuah silinder terapung bebas di atas gelombang reguler (tegularwave)
yang mempunyai panjang lebih besar daripadadiametersilinder [7]. Jikagelombang
melewati struktur terapung itu, malca fluida sekeliling akan menimbulkan gaya dan
mom en hidrodinamis pada struktur tersebut. Oaya dan mom en yang timbul, menurut
WU (1] dapat dibedakan dalam dna kategori sebagai berikut :
Pertama, komponen eksitasi unsteady, yang dikenal sebagai gay a orde pertama
yang dapat menyebabkan gerakan osilasi body. Komponen ini secara tinier
propor-sional dengan tinggi gelombang.
Sedang bagian komponen yang lain,yaitu gayaorde kedua,yang
II~
magnitude kecil
dan
diperldrakan proporsional dengan kuadrat tinggi gelombang. PadaGbr. ~.1 . di bawab ini ditunjukkan diagram pembagian gayadan mom en yang disebabkan oleh fluida di sekeliling bangunan lepas pantai yang berada padagelombang. Pembahasan mengenai gaya atau momen osilasi tingkat pertama (flm
order oscl/ato11 forces or moment)
dapat diuraikan sebagai berikut. Oaya osilasi orde kesatu dapat dibedakan dalam dua bagian komponen, yaitu:a.
Oaya viskus b. Oaya tekanan11.1.1 GAY A VISKUS
Oaya ini dihuilkan oleh viskositas fluida, dan berhubungan dengan kecepatan
fluida pada floating body. Aliran kecepatan ditimbulkan oleh gerakan benda kaku
(rigid bodJ)
dan
gelombang, yang selanjutnya menimbulkan gaya damping pada struktur karena viskositas. Padafenomena-fenomenafisik tertentu, seperti perputaransilinder dalam fluida, dimanagaya tekanan mempunyai magnitude yang kecil, maka
I:E-3
Fluid forces or moment
l
First order
oscila tory forces
-~
Second order steady forces
"'
"'
Force due to Force due to viscosity (FV) fluid pressure
Hydrostatic forces (FC) Hydrodynamic forces
Body motion induced
force (radiation forces)(FR)
!
Wave induced force (wave exiting force)(FW)
r
Inertia force dueto added mass (FA)
Velocity force
(damping force)(FBR) Incident wave force(Froude-Krylov)(FI)
~
l
Due to Due to potential viscous damping (FB) dampingt
Viscous due tobody motion induced fluid motion
Diffrated (FVR) wave force
(FD)
Viscous force due to wave induced fluid motion (FVW)
Oambar 2.1 Diagram semua gaya dan momen fluida yang terjadi pada body karena gelombang
. II-4
ll.1.2 GAYA TEKANAN
Oaya tekanan dapat dibedakan menjadi dua kategori, yaitu :
a. Gaya pengembali bidrostatik (hldrostatlc restoring force)
dan
b. Oaya bidrodinamik (hldrodlnamlc force)
ll.1.2.1 GAYA PENGEMBAU IDDROSTATIK
Oaya pengembali bidrostatik adalab gaya yang disebabkan karena
perpinda-han fluida yang menimbulkan penambaban atau pengurangan volume floating body
yang tercelup dalam
air
(811bmerged Yol~mte). Oaya ini secara tinier berubab sesuaidengan displasemen gerakan floating body, dengan arab yang berlawanan. Sebingga
gay a pengembali hidrostatik ini dapat disusun sistem persamaan gaya sebagai berikut:
F e .. - CS (21)
dimana:
Fe
= gaya pengembali hidrostatik. C = koefisien gaya pengembali.· II-6
ll.1.2.2 GAY A HIDRODINA:MIK
Pengelompokkan gaya hidrodinamik
ini
dapat dilibat pada Gbr •• 2.1 di alas.Diantara gaya-gaya bidrodinam ik itu
adalah :
- Gaya inersia hidrodinamik (F.).
- Gaya kecepatao hidrodinamik atau gaya redaman {F8 ).
- Gaya eksitasi gelombang atau wme lndltcedforce
<Fw>·
- Gaya Froude-Krylov atau Incident wme force (FJ. - Gaya diffi"aksi gelombaog {F0 ).
ll.1.2.2.a GAY A INERSIA IUDRODINA:MIK
Suatu gerakan benda terapung {floating bod]) yang dipercepat di dalam medium flu ida akan mengalami suatu gaya inersia. Gaya tersebut akao lebih besar
dari basil kali massa benda dengan percepatan gerakannya. Hal ini .karena adanya
gaya tam bah an (addedfotee) yang merupakan basil perkalian antara percepatan benda tersebut dengan suatu besaran yang dimensinya sam a dengan massa benda tersebut7
yang disebut dengan added mass. Added mass ini timbul karena bergeraknya benda
terapung tersebut secara osilasi dan m endesak fluida di sekitamya pada suatu arab
tertentu sesuai dengan arab gerakan benda, dan jumlah massa yang didesak tersebut
disebut massa tambah. Untuk mengetahui lebib jelas mengenai added mass dibahas
II-6
Jadi gaya inersia hidrodinamik
adalah
gaya yang ditimbulkan oleh massa tambah hidrodinamik yang sesuai dengan percepatan gerakan, dan gerakaonyamempunyai
arah
yang berlawanan, sehingga gaya ini dapat ditulis dalambentuk
persamaan gaya, yaitu :
F.A ...
-.AS
(22)dimana:
F4
=
gaya inersia hidrodinamik.A = massa tambah hidrodinamik (moiJlen inersia massa tam bah) .
..
S = percepatan gerakan.
ll.1.2.2.b GAYA KECEPATAN HIDRODINAM.IKATAU GAYA
RED A MAN
Gaya redaman (damping force) pada suatu benda terapung yang bergerak
secara osilasi adalah disebBbkan oleh viskositas air dan energi yang hilang untuk menimbulkan ombak sebagai gangguan terhadap fluids. Energi tersebut dihasilkan
dari energi yang ditransmissikan ke fluida (air) dari suatu sumber luar, misalnya
II-7 gelombang itu sendiri dapat ditinjau sebagai media pemindahan energi. Oaya
kecepatan hidrodinamik atau gayaredaman ini proporsional dengan kecepatan,
S,
dan m empunyai arah yang berlawanan. Selanjutnya sistem persamaan gayaredaman dapatdiberikan sebagai berikut :
dimana :
FB = gaya kecepatan hidrodinamik.
B = redaman hidrodinamik per satuan kecepatan.
S
= kecepatan gerakan.(2.3)
ll.1.2.2.c GAY A EKSITASI GEW:MBANG A TAU WAVE INDUCED
FORCED
Wave induced force ini adalah merupakan penjumlahan seluruh hasil gaya
gelombang insiden (Incident wmre fo1ce) atau gaya Froude-Krylov dengan gaya
diffraksi gelombang, yang magnitudenya bervariasi terhadap faktor waldu. Untuk
memahami gaya Froude-Krylov ini akan dibahas dalam pasal "gaya body akibat
Il-8
Penjumlahan gayaFroude-Krylov
(FJ
dan gayadifrraksi gelombang (I'D) dapat disusun dalam bentuk sistem persamaan seba.gai berikut :F., ""
(FJ + FD) ,,.,dimana :
Fw = gaya eksitasi gelombang.
i =
-.J-1,
unit bilangan kompleks.ro
= :frekuensi radian pada gelombang reguler.t = faktor
waktu.
(2.4)
Berdasarkan hokum Newton kedua, maka penjumlahan gaya fluida yang
disebutkan di atas harus sama dengan gaya atau momen inersia FM dapat diekspresikan seba.gai massa floating body (atau mom en inersia massa) dikalikan
dengan percepatan gerakan benda, dalam bentuk berikut :
..
FM "" M
S ""'
F., - F.A - FJJ - Fe
(2.5)dimana:
I:E-9
Dengan memasukkan persamaan-persamaan di atas ke dalam pers.(2.S), maka
persamaan gaya atau momen akan menjadi :
M
S •
F,
-.A
S -
B
I -
C S
(2.6)
ll.2 KONSEP MASSA TA:MBAH
Konsep massa tam bah ini diperkenalkan untuk menjelaskan fen omena fisik
tentang kecenderungan suatu benda tenggelam yang bergerak dengan percepatan
relatifterhadap fluida di sekitamya, yang selanjutnya akan memberikan percepatan
padafluidatersebut. Untuk dapatnyafluida bergerak
dan
mengalami percepatan, maka diperlukan gaya. Oaya ini adalah berupa distribusi tekanan, yang pada prinsipnyatimbul dari fluida di sekeliling benda. Karena benda tenggelam di sini memberikan
percepatan pada fluida, maka fenomena ini dapat disamakan dengan adanya massa
dalamjumlah tertentu yang ditambahkan padamassabendayang sebenamya. Konsep
ini sangat penting untuk dipertimbangkan dalam analisayang menyangkut percepatan
II-10
Untuk menjelaskan konsep massa tambah ini dapatlah dilihat permasalahan
bendayang bergerak menurut garis lurus tanparotasi. Dalam Gbr. 2.2 di bawah ini,
benda pejal B sedang bergerak dalam fluida yang tidak terbatas
dan
semula dalam keadaan diam.Bila kecepatan benda B pada suatu saat tertentu adalah U, maka kecepatan
fluida pada sebarang titik P (yang mempunyai posisi tetap relatif terhadap benda)
akan proporsional terhadap U.
w v
z
yp
u Xu
Oambar 2.2 Sistem sumbu u,ntuk fonnulasi massa tambah
. Bilaa, v, w adalahkomponen-komponen kecepatan fluidapadatitikP, maka
II-11
" - V.jll
v ...
v .
jV
w -
v.
JW
(2.7)
Dimana fa, fv, fw adalah harga-harga u, v, w untuk satuan
U
dan mmJpakan fungsi dari koordinat P relatif terhadap benda. Jadi dalam hal ini, sebuah elemenpersegi empat dengan dimensi dx, dy, dz dari fluidaakan mempunyai energi kinetik:
Sehingga energi kinetik total dari fluida adalah :
(2.9)
dimana:
V = Volume fluida total.
II-12
pers.(2.9) dapat ditulis sebagai berikut :
B
=
o.s
p
U
2K
(2.10)dimana:
(2.11)
K adalah konstan untuk suatu benda tertentu dengan gerakan tertentu pula. Harga konstanta.ini tergantung pada perilaku benda dan arab gerakannya.
Dalam pennasalahan dim ana kecepatan benda berubah terhadap waktu, maka perubahan itu akan terjadi juga dengan tluida di aekitamya. Dengan prinsip kekekalan energi, haruslah ada kerja yang mengenai tluida. Kalau X adalah komponen gaya total yang dikeluarkan oleh benda terha.dap tluida pada arab gerakannya, maka -X a.dalah merupakan gaya reaksi yang dikeluarkan oleh tluida terhadap benda tersebut. Keija yang diberikan oleh B pada saat bergerak dalam jarak pendek dx, selanjutnya dapat ditulis :
II-13
Dari pers.(2.10)
tiB • K
p
tlU/tll
til
Dengan mempersamakan
dE,
diperoleh :X • K
p
dU/tll
(2.12)Dari analisa diatas dapat dikatakan bahwa benda yang tenggelam akan
menga-lami hambatan terhadap percepatan gerakannya. Hambatan ini atau gaya percepatan
reaksi, akan sam a besamya dengan hasil kali dari percepatan benda dan
Kp,
yaitu yang dapat dikatakan sebagai massa tam bah dari benda untuk gerakan translasi yangditinjau. Bila gaya massa tam bah ini sam a dengan nol, maka hambatan akan timbul
hanya sebagai akibat gesekan kulit dan hambatan tekanan.
Evaluasi umum di atas diuraikan dengan asumsi bahwafluidadalam keadaan
diam, dan tidak ada gangguan yang membatasi ruangan fluida Dalam hal fluida dan
benda di ruangan dengan batasan, maka harga fa, fv, fw juga akan tergantung pada
posisi relatifB terhadap batas tersebut. Harga integrasi yang memberikan konstanta
K selanjutnyajuga berubah, sehingga resultan massa tam bah akan bertambeh juga.
Secara umum perbitungan massa tam bah dilakukan untuk fluida sempuma, imlcld,
tanpapembatas. Dari berbagai evaluasi dapat ditunjukkan bahwakontribusi viskositas
II-14
cukup akurat. Berikut ini akan ditunjukkan contoh perhitungan massa tam bah, yaitu untuk silinder dengan panjang tak terhingga.
Peninjauan di sini dilakukan pada silinder dengan jari-jari, a, yang bergerak pada kecepatan, U, searah OX yang tegak lurus sumbu dari silinder.
u
y
X Gambar 2.3 Evaluasi massa tambah silinder
Fluida di sekitar silinder dalam hal ini dapat dipertimbangkan sebagai kon-figurasi duadimen~i (2D). Untuk silinder dengan panjang tak terhingga, makaanalisa dapat dilakukan dengan memperhatikan satu lapisan fluidadengan unit ketebalan se-panjang sumbu silinder. Potensial kecepatan aliran fluida di sekitar silinder tersebut adalah:
• =
dimana:u
a
2cos
a
r
z
=
r
cos
e
, =
rsine
II-15 (koordinat kartesius) (2.13) (koordinat kutub) (2.14) (215)Persam aan di atas adalah pot en sial kecepatan aliran di sekitar silinder
dikurangi dengan aliran steady U. Hal ini berarti sama juga dengan memberikan
persamaan silinder yang bergerak searah dengan sumbu x dalam fluida diam. Dari
persamaan di atas selanjutnya diperoleb :
II-16
(217)
w
=
0 (karena dua dimensi)dan
JU=-ft
.fw ...
0 Jadi: 211. =P
f
Jc
0 •II-17
(218)
Oaya massa tam bah kemudian adalah :
X=
pK~
=
peav.f.
(219)dimana:
dU/dt
=
percepatan body.v = volume benda di dalam air (volume displasemen).
p
= massa jenis fluidac.
=
koefisien massa tam bah silinder=
1.0Sedangkan
p,
Ca, v dipakai sebagai parameter yang dapat diperhitungkan dengan mempertimbangkan pengaruh aliran di sekitar berbagai bentuk benda, serta'
pengaruh dari karakteristik fluida non-ideal, yaitu seperti pemisalan aliran dan
turbulensi yang tidak diperhitungkan dalam fonnulasi atau evaluasi aliran potensial
II-18
IT.3 GAYA BODY AKIBAT INERSIA FLUIDA
Oaya yang bekerja pada benda akibat adanya percepatan relatif antara fluida di sekitamya bukan hanya gaya massa tambah. Percepatan relatif tersebut juga menyebabkan timbulnya suatu gaya tambahan yang dialami bendatersebut, yaitu gaya tekanan tak terusik (JUJdtsturbed pt'eSSIII'e force) atau lebih dikenal dengan "Gaya
Froudo-Krylov (FK)". GayaFroude-Krylov ini proporsional dengan percepatan fluida
di
sekeliling bendaBila ditinjau volume suatu benda yang sedang bergerak dengan suatu percepatan seperti Gbr. 2.4
di
bawah ini.Fluida
Volume· benda
Gam bar 2.4 Benda yang bergerak dalam fluida dengan percepatan konstan.
Untuk benda yang bergerak dengan percepatan konstan, pasti ada medan gaya tekanan (preSSIII'e force field) persatuan volume yang diperlukan untuk memberikan
teka-II-19
nan yang mampu mempercepat fluida sedemikian hingga menimbulkan gaya yang mampu mempercepat fluida di dalam elemen B tersebut. Sehinggaelemen itu mempu-nyai percepatan yang sam a dengan percepatan dari fluida di sekelilingnya. Jika ele-men B tersebut diganti dengan benda, dengan demikian benda tersebut merupakan benda benam, maka gaya tadi akan bekerja pada permukaan benda tersebut dalam bentuk tekanan yang didistribusikan padapermukaan tadi, sebagaimanahalnyaketika benda tersebut masih berupa elemen volume fluida. Oaya ini disebut GaJa Telulnan
Talc Te1'1181l (gtJTa PNJIIde-KfT/0'1) . Oaya ini merupakan ekivalensi dinamik gaya
tekan ke atas. Dalam hokum Archimedes, medan gayayang menimbulkan percepatan adalah medan gayagravitasi. BesamyagayaFroude-Krylov tersebut ditentukan oleh besamya gaya yang diperlukan oleh benda, sehingga mempunyai percepatan yang sam a dengan percepatan fluida di sekeliling benda tersebut. Dengan demikian maka:
.
FK
=
pVU
(2.20)dimana:
p
=
massa jenis fluida.v .. volume benda yang dipindahkan oleh benda.
..
U
=
percepatan fluida di sekeliling benda.Perlu diperhatikan bahwa gaya massa tambah hanya timbul jika ada percepatan relatif antara benda dan fluida di sekitamya. Sedangkan gaya Fronde-Krylov akan timbul jika ada percepatan fluida. Dengan demikian, maka gaya yang bekeija pada benda akibat inersia fluida dapat dikelompokkan sebagai berikut :
II-20
Tabel 2.1
Percepatan
I
Benda. Fluida Gaya Massa Tam bah Gaya Froude-Krylov0 0 0 0 0
u
p
CavUp
vU..
" X 0-p
Ca vX 0..
.
"p
vU Xu
p
Ca v(U- X)Dari tabel terlihat bahwa gaya inersia total pada benda diam yang bergerak dalam fluida dalam rekayasa lepas pantai, misalnya semi-submersible catamaran bull yang mendapat beban gelombang adalah sebagai berikut :
F1
=
FK +Fa=
pVO+pCaVli
=
(Ca + 1}p
v
iJ
(2.21)dimana :
c.
=
koefisien massa tambah.II-21
= koefisien inersia tambah (added lne1'81a coej'l8lent).
Bila ditinjau kasus lain, yaitu benda bergerak dengan percepatan X relatif
terbadap sumbu tetap di dalam fluida yang bergerak dengan percepatan U juga relatif terbadap sumbu tetap yang sam a (tadi). Jika volume benda v, koefisien inersia C., dan massa fisik ~ maka [17] :
M
:l
=
F~ + Fl"" FB + (FK +Fa} (222)
dimana:
Fe
=
Gaya luar yang bekeija pada bendaFK
=
pVOFa
=
pV
Co (0 -
X) (223)sehingga:
FB
=
M:l -
pV
0 -
p CoV (
0 -
:l}II-22
BABID
MODEL SISTEM DERAJAT KEBEBASAN
SEMI-SUBMERSmLE CATAMARAN
HULL
· ID.l SISTEM SATU DERAcl4.T KEBEBASAN
Sebagaimana diketahui, gelombang 181Jt akan menimbulkan gaya yang
merupakan fungsi dari waktu, at81J disebut dengan gaya dbumlls. Untuk menganalisa
pengaruh gaya ini terhadap struktur l8Ut, diperlukanlah analisa dinamis dari struktur
terhadap gaya tersebut. Respons dari struktur tersebut terhadap gaya dinamis sangat
tergantung pada besaran massa, kekakuan dan kemampuan penyerapan energi (redaman) dari struktur tersebut. Selanjutnya, respons dinamis dari struktur terapung
yang mendapat gaya dinamis tersebut oleh Ma.io Paz [3], Roy.R. Craig,)" [4] dan SK. Otakrabarti [6) dapat dimodelkan sebagai sistem satu derajat kebebasan, yang
ditulis dalam bentuk persamaan sebagai berikut :
m-2
dimana:
M = massa struktur.
C = redaman
struktur.
K
= kekakuan struktur.F.
= amplituda gaya atau momen eksitasi.Penyelesaian dari persamaan tersebut terdiri dari penyelesaian komplementer
dan penyelesaian partikular, dan dapat dinyatakan dalam bentuk persamaan :
(3.2)
Penyelesaian komplementer adalah penyelesaian yang didapatkanjikaruaskanan dari
pers.(3.1) sam a dengan nol, dengan memakai kondisi undenlampa sehingga didapat:
Xc
= e
-f.rJJJ (.Acos
6)J
+ Bsin
6)J) (3.3)Untuk mencari penyelesaian partikular, maka terlebih dahulu dilakukan modii.tkasi
terhadap persam aan gerak dengan m enggunakan persam aan Euler, sehingga diperoleh
(3.4)
Hams diingat, bahwa. hanya komponen riil dari
F.
J-
yang diperhitungkan,dan
m-3
di atas dapat diasumsikan bahwa bentuk penyelesaian partikular adalah :
. (3 . .5)
Dengan memasukkan pers.(3 . .5) ke dalam pers.(3.4) akan didapatkan :
(3.6)
sehingga:
~
=
(3.7)Dengan menggunakan transfonnasi koordinat polar, maka pers.(3. 7) dapat ditulis :
.; =
(3.8)X ...
7 dimana:roo=
F. ,,,,.,-
8)•
m-4
(3.9) (3.10)Dengan mengambil komponen
riil
dari pers.(3.9), maka diperoleh persamaan :.; =
X
cos
((a)t - 6) (3.11) dengan:X
=
(3.12) sehingga:P•
cos (
(a)t - 0) (3.13).; =
F,iK cos (
6)1 - 0) .. .r.
cos
c
(a)t - a)f(l - r
2P
+(2(r)2
dimana:wa-
2\r
1 -r
2' =
~
c
c~...
2M
(a)•r ...
(3.14) (3.15) (3.16) (3.17) (3.18) (3.19) (3.20)m-6
didapatkan penyelesaian komplementer dan penyelesaian partikular, maka respons total dalam bentuk persamaan gerak sistem satu dengat kebebasan adalah :
X ""
e
""'~
(Acos
"'I
+.B
sin
ri~J)
+:r..,
cos ( "'' -
O) (Ul)J
(1 -
r:IZ)2 +(2{r)2
Jika diteliti persamaan ini, maka nampak bahwa faktor yang merupakan
penyelesaian komplementer akan bertambah kecil dengan bertambahnya waktu.
Sehingga jelaslah bahwa yang mendominasi respons adalah penyelesaian
partikulamya, yang dapat dinyatakan sebagai faktor kedua dari pers.(3.21 ). Secara
umum bagian komplementer disebut respons transien dan bagian partikular disebut
respons steady state.
Karena pada kenyataannya yang memegang peranan adalah respons pada
bagian steady state, maka dapat dianggap penyelesaian total persamaan gerak sistem
ini adalah :
:r
=
x ..
cos (
rilt - 0)J
(1 -r
2P
+(2{r)2
(3.22)Bilakemudian didefinisikan suatu besaran D, yaitu besaran yang menunjukkan
m-7
D
=
~ (3.23)Menurut MG. Halam, NJ. Heafe & LR Wootton [15] persamaan yang berlaku untuk faktor pembesaran D tersebut mempunyai tiga karakteristik penting, yaitu : a. Ilka ~
«
~..
maka r AI 0, sehingga berdasarkan persamaan tersebut respons yangteijadi dapat dika~ sama dengan respons statis. Hal ini berarti respons sangat tergantung pada besaran kebkuan (K).
b. Ilka ~ = ~ .. maka r = 1, sebingga respons dipengarubi oleh redaman yang diala-mi struktur. Hal ini
berarti
perlu dilakukananal:isa
dinamis terbadap strukturterse-but.
c. Ilka ~
»
~..
maka r > 1, sehingga respons sangat tergantung pada massa struktur.Hal ini juga berarti diperlukan analisa dinamis untuk struktur tersebut.
Response Response controlled by stiffness. Use quasi-static analysis Use dynamic analysis Frequency, f [Hz} Response controlled by mass
m-s
lll.2 SISTEM ENAM DERAJAT KEBEBASAN
Sistem yang mempunyai satu dengat kebebasan berarti pada sistem tenebut hanya akan mempunyai satu gerakan s~a, tanpa ada pengaruh gerakan ke
arah
yang lain. Demikian pula gaya eksitasinya, hanya berpengarnh kesatu arah.
Kondisi demikian ini sangat ideal, hampir tak pemah dijumpai dalam kondisi riilstruktur
taut.Struktur laut terapung, pada khususya, dalam operasi akan mengalami gerakan-gerakan disejumlah
arah.
Diantaragerakan-gerakan tersebut ada kemungki-nan teljadi kombinasi dalam bentuk gerakan kopel. Ada tiga macam gerakao bangunan apung yang banyak mendapatkan perbatiandari
perancang (atau dapat juga dianggap sebagai gerakan-gerakan pokok), yaitu :a. Heave (Z)
=
gerakan osilasi translasional terhadap sumbu z. b. Roll (cp)=
gerakan osilasi rotasional terhadap sumbu x.c. Pitch (9)
=
gerakan osilasi rotasional terhadap sumbu y.Di samping ketiga macam gerakan pokok di atas masih ada tiga macam gerakan lainnya yang timbul bersama-sama dengan gerakan-gerakan pokok tadi. Ketiga gerakan tersebut adalah :
d Surge (X) = gerakan osilasi translasional terhadap sumbu x. e. Sway (Y) = gerakan osilasi translasional terbadap sumbu y.
f.
Yaw<•>
= gerakan osilasi rotasional terhadap sumbu zID-9
z
-~·-
- - - X . / .,,"' /Gambar 3.2 Defmisi enam derajat kebebasan pada free floating body.
Selanjutnya dapat dijelaskan dengan diagram pada Gbr. 3.3 dan Gbr. 3.4 yang menyatakan perbedaan utama sistem satu derajat kebebasan dan N c:JenYat kebebasan referensi [16]. Excitation force Xt
I
Characteristics of IJitem 1 (S t)I
Motion Zt(Xt}>
>
X :aI
Xa (Xa)>
(St)>
Xs zs(Xa)I
) (Ss)>
• :z..(XK)x.
•.
>
I
Sx>
Gambar 3.3 Blok diagram dari N sistem yang masing-masing mempunyai satu
m-10 Motion x1 (X 1 X
a
X3 ... ,
Xw
Ss : I - - --s4 :
' - - -s
6 -.
.·-
- - - - 1. - - - - IGambar 3.4 Blok diagram dari satu sistem dengan N den.Yat kebebasan.
Berdasmkan asumsi-asumsi sebagaimana telah disebutkan dalam bah
pendahuluan pasal batasan masalah, menurut WU [1]
dan
SK. Otaknlb.ti [6], persamaan kopel gerakan enam det1Yat untuk bangunan lepas pantai karena eksitasigelombang sinusoidal secara periodik pada frekuensi CD dapat ditulis :
6
h
(M,p; + .A,p;)S~
+B.14
S~+ Cft S~ -
F.J
e''"
(3.24)dimana:
k = mode gerakan yang memuat 1, 2, 3, 4, 5 dan 6 yang masing-masing untuk gerakan surge, sway, heave, roll, pitch dan yaw.
j
=
mode eksitasi yang memuat nilai seperti k untuk mode yang bersesuaian.M,.
= matrik massa yang m emuat massa, mom en massa inersia atau hasil inersia padam-u
~ = matrik massa tam bah yang memuat massa tam bah dan mom en inersia massa tambah per satuan percepatan gerakan.
B.lk = matrik redaman (damping) yang memuat gayaredaman dan momen ine~siaper satuan kecepatan gerakan.
C,.
= matrik pengembali (restoring) yang memuat matrik gayamomen pengembali persatuan simpangan gerakan.
~ = vektor kompleks simpangan gerakan per satuan amplitudo gelombang. FJ = vektor gaya dan mom en eksitasi gelombang per satuan amplitudo gelombang.
Untuk memenuhi pers.(3.24) dapat diidentifikasikan sebagai berikut :
yaitu m assa struktur apung
yaitu mom en inersia massa dalam mode roll, pitch dan yaw
yaitu simpangan gerakan, masing-masing dalam mode surge, sway, heave, roll, pitch
dan yaw.
-m-12
Vektor gaya dan momen eksitasi gelombang dalam ruas kanan pers.(3.24)
adalah merupakan fungsi kompleks yang dapat ditulis sebagai berikut :
(3.25)
dimana:
FJ =amplituda gayakompleks yang dapat diekspresikan dalam bagian riil (R)
dan bagian im~iner (I) sebagai berikut :
~ - (F.Jil + I F_p) (3.26)
Dengan memasukkan pers.(3.26) ke dalam pers.(3.25) didapatkan :
F;
=
FJM cos6lt + FJI sinfalt (3.27)Pers.(3.27) selanjutnya dapat dinyatakan sebagai :
Ej
=
lEi I
cos c e1 - faltl {3.28)dimana:
F
11=
gaya eksitasi gelombang maksim~.sedangkan
e
1=
azctan ( :;)
m-u
(3.30)
eJ = phase perubahan gaya eksitasi gelombang maksimum dan gelombang insiden pada titik awal sistem koordinat gelombang.
Agar sesuai dengan ekspresi kompleks
F-'>
maka simpangan gerakan ~hams juga diasumsikan dalam bentuk variable kompleks, yang diberikan sebagai berikut :(3.31)
Dengan demikian> komponen kecepatan dan percepatan dapat ditulis sebagai :
(3.32)
(3.33)
Dengan menggunakan persamaan matematis dari pers. (3.27) sampai pers.(3.33)> simpangan gerakan dapat juga dinyatakan dalam bentuk sebagai berikut :
m-14
(3.34)
(3.35)
(3.36)
s. -
IS.I
cos
(At - 6ll} (3.37)a
1 ...a:~:ctan
( .;;)
(3.38)dimana:
~~ = displasemen maksimum.
~ = perubahan phase displasemen maksimum dari gelombang insiden maksimum di titik asal sistem koordinat gelombang.
ill.3 PERSAIWAAN GERAK SE:MI-SUBMERSffiLE CATAMARAN
HULL
Dalam menyelesaikan persamaan gerak yang terjadi pada semi-submersible
m-jj
gerakan yang lain. Karena massa tambah, redaman dan gaya diffraksi gelombang dalam arah sumbu
x
dapat dianggap kecil dan diabaikan [t]. Maka persamaan gerak surge dapat ditulis :(3.39)
Dengan menggunakan hubungan sistem koordinat pers.(3.39) menjadi :
(3.40)
Selanjutnya persamaan gerak dari SSCH dapat dikelompokkan dalam dua go Iongan,
yaitu :
a Mode gerakan bidang vertikal yaitu heave dan pitch. b. Mode gerakan bidang horizontal yaitu sway, roll dan yaw.
Dengan mengembangkan pers.(3.24) yaitu :
(3.41)
Untuk mode gerakan heave dan pitch, j, k
=
3 dan 5. Hal ini dapat dinyatakan ·sebagai berikut :m-16
Dengan menggunakan hubungan sistem koordinat, maka pers.(3.42) menjadi :
Substitusi pers.(3.32) dan pers.(3.33) ke dalam pers.(3.43) untuk nilai j, k
=
3dan
5didapat persamaan barn sebagai berikut :
[ (1
5+.A55) ( -(a')2 ) +B55 ( -i(a'))
+C
55]S
5+[A
53 ( -(a') 2) +B53 ( -l(a')) +C53
]S
3 ""F5(3.44)
Dengan mensubstitusikan pers.(3.26) dan pers.(3.34) ke dalam pers.(3.44), untuk j, k
=
3 dan 5 dan kemudian menyusun suku ruas kanan dan kiri pada sistempersamaan yang disebutkan diatas dalam bagian riil dan imajiner, selanjutnya dengan memakai indeks notasi yang bersesuaian dengan sistem koordinat, maka dapat dibuat
m-11
bentuk matrik sebagai berikut:
-r
C.lf+~3> +e:,3 -(1)~5 +C:,5~3
~5·-(1)2~5
+C35 -~ (15+.A55) +C55
d53
d "
-~3 -fal835 -(1)2 (.11+~3) +C33 -(1)2~5 +C:,s
-(al853
-6llfu -(1)2A53
+C53 -(1)2 (15+.Au} +Cu.'R
F3R
*
a.
=
F&R
(3.45)~
F31
61
F51
Dengan memasukkan j~ k = 2, 4, dan 6 untuk mode sway, roll dan yaw selanjutnya dapatlah ditulis persamaan sebagai berikut :
m-18
Dengan memakai hubungan sistem koordinat, maka pers.(3.46) dapat berubah
menjadi:
(3.47)
Dengan cara yang sama seperti pada heave dan pitch akan diperoleh bentuk matrik sebagai berikut :
-r,ii (JI+.A22) -(1)2.A:.. -(1)2.A:.6 6lB22 (I)~.
-(1)2~, -w2
(J,
+A")+C,.,
-w2A..
,
6lB2.&wB,. ..
-(1)2~2 -6)2~, -r,ii (16 +~6
l
fal862 wB6,-(1)~2 -w~, -~6 -(1)2 (.11•~2) -(1)2~ ..
-~,
-d.u
-.,B,6 -r,iiA2, ·-w2 (1, +A")-(I)B62 -(I)B6.t -(I)B6, -~.A62 -(1)2A
....
(1)~6 Y,~
F2R
wB,6 ~F.._
(I)B,,'"
Fu
-(1)2A 26*
yl
""F21
(3.48) -Q2.A 46..,
F41
-(1)2 (~ +~6}.1
F61
BABW
MODEL MA TEMA
TIS
RESPONS
GERAKAN SEMI-SUBMERSmLE
CATAMARAN HULL TERIIADAP
GELOMBANG REGULER
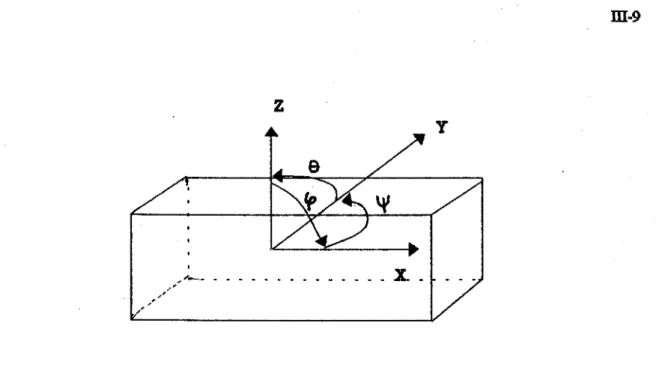
- IV.l SISTEM KOORDINAT SEMI-SUB:MERSffiLE CATAMARAN
HULL
Pada Obr. 4.1 dan Obr. 4.2 dapat dilihat sistem koordinat O.X.Y.~ pada body SSCH yang tetap dan sistem koordinat 0
1
-~T}~ pada tempat yang tetap. Pada sistem koordinat yang pertama, sumbu utama adalah melalui titik simpul gelombangpada garis air tenang dengan titik asal 0, bidang horizontal berisi sumbu x yang
searah panjang SSCH dan sumbu y pada arah melintang, sedang sumbu z pada arab vertikal. Sistem koordinat kedua dibentuk dari pasangan sumbu utama benda yang
IV-l
dan
11
ke arab m elintang, sedangkant
kearab
vertikal.Dari
adanya sistem koordinat ini, maka untuk kondisia:ir
tenang bidangO.JC.Y.
akan sama dengan bidang ~-Ql.Jadi dengan mengetahui sistem koordinat dari SSCH, kita dapat menggambarkan
gerakan-gerakan yang teljadi pada SSCH.
Wave
b
A
Gambar 4.1 Sistem koordinat SSCH pada kondisi beam sea
.
I I I I I I I I I.
----...
.
v
xb
Ir--
0 °1.
vr1
....
.
-
I.
I I Column G l I l I ll
lI
I Caisson I I.
!. At _X a.
..
L r'IV-3
IV.l PERSAMAAN GERAKAN HEAVE DALAM KONDISI BEAM
SEA
Potensial kecepatan gelombang reguler perairan tenang pada kedalaman talc terbatas [1], dapat dituliskan sebagai berikut :
(4.1)
Sedangkan persamaan pennukaan gelombang adalah :
(4.2) dimana:
t;.
= amplitudo gelombang.l
= panjang gelombang.T.
= periode gelombang. CD = frekuensi gelombang. k = augka gelombang. (4.3)IV-4
(4.4)
Berdasarkan hulmm Newton kedu.a, maka persamaan gerakan heave dapat
ditulis sebagai berikut :
(.II+
-'\}.Z
+B" Z
+C"
Z ... ~cos
wt
(4.5)dimana:
Z = displasemen gerakan heave.
A.
= massa tambah gerakan heave.F.
= amplitudo gaya eksitasi gerakan heave.B.
=
koefisien redaman gerakan heave.Massa tam bah
A.
untuk gerakan heave cukup mempertimbangkan massatambah yang terjadi pada caisson, sehingga didapatkan :(4.6)
dimana:
K1
=
koe:fisien massa tmnbah yang diperoleh dari graftk pada Gbr. 4.3IV-5 a.a~---~ 1 o.e oL---
1
---a----s---.----e--~e~-7=-~a~~e~~10a/b
Gambar 4.3 Koefisien massa tambah.
Periode natural heave dapat diperoleh dengan mengasumsikan Bz = 0 dalam
pers.(4.5), sehingga didapat :
(4.7)
dimana:
(4.8)
Aw = water plane area pada SSCH.
r
= jari-jari column SSCH.Sedangkan koefisien redaman dalam gerakan heave adalah :
B" •
4~
(.II +~}
T"
dimana:
ftt = nilai korelasi koefisien damping gerakan heave yang diperoleh
IV-6
(4.10)
dari basil experimen oleh WU(1991), yang mempunyai nilai 0,094.
Gaya eksitasi gelombang yang menimbulkan gerakan heave terjadi karena adanya gaya Froude-Krylov dan gaya massa tambah. Oaya Froude-Krylov yang terjadi pada caisson (ponton) dan column dapat ditulis sebagai berikut :
, F.u
= p g~
[ 4L .,-...
<•..v, -
1)sin .tb,_
+ " - "'!.'
l .,-...
J•
IV-7
dimana:
n_
=
jumlah column SSCHGaya massa tam bah yang terjadi pada caisson dinyatakan sebagai :
1 /,. + ~)
F~
= -
2n
p
g
k
C.
~3L
K1 1 f' ~
cos
kb
cos "''
(4.12)Dari gambaran di atas, gaya eksitasi total gerakan heave dapat ditulis :
IF"
I
cos
t.)t ... (IF"'-'
I
+ IF~I )
cos
t,)f(4.13)
Respons dinamis gerakan heave dapat dinyatakan sebagai berikut :
(4.14}
Berdasarkan pers.(4.5), dapat diperoleh amplitudo respons dinamis per satuan amplitudo gelombang dan beda phase gerakan heave.
IV-8
IV.3 PERSAMAAN GERAKAN KOPEL SWAY DAN ROLLDALAM
KONDISI BEAM SEA
IV.3.1 GAY A EKSITASI GEWMBANG UNTUK GERAKAN SWAY
Dengan cara yang sama seperti yang telab dijabarkan dalam sub-bab
sebelumnya Oaya eksitasi gelombang untuk gerakan ~ dapat dibedakan menjadi dua bagian yaitu :
a Oaya Froude-Krylov, F,.(li'.K), dan
b. Oaya dalam satu phase dengan percepatan orbital gelombang pada arab 1},
F,.(taCD).
Sehingga gaya eksitasi total sway adalah :
Oaya F,.(li'.K) dapat dibedakan menjadi dua gaya, yaitu :
a Oaya F,.(li'.K)1 yang teijadi column dan
b. Gaya F,.(li'.Kh yang teijadi pada caisson.
Oaya-gaya tersebut dapat dinyatakan sebagai b~rikut :
(4.15)
F
7CF.K)
1= - "-"
pg
~
d
J
1 (lr) (l. - "-M)cos
kb
sin
~~
IV-9
F
1CF
.K)~
... -4p g
~
L
'-~r~~
(l - ,-u,_)sin
lb
1cos
kb
sin
6ll(4.17)
Gaya F,.(1\.) juga dapat dibedakan menjadi dua bagian yaitu :
a. Gaya F,.(JU1 yang terjadi pada column dan
b. Gaya F,.(i\..h yang terjadi pada caisson.
Gaya-gaya tersebut dapat ditulis :
IV.3.2 MOMEN EKSITASI GEUJMBANG UNTUK GERAKAN
ROLL
Sesuai dengan prosedur sebelumnya, m aka mom en eksitasi gel om bang di pusat
IV-10
(4.20)
Selanjutnya
Mp
.K)
dapat dibagi sebagai berikut :(4.21)
dimana:
Mp.K)
1 =mom en yang disebabkan oleh gayahorizontal yang terjadi padacolumn.Mp.K)z= momen yang disebabkan oleh gayahorizontal yang terjadi pada caisson.
MJF.K)
3 =mom en yang disebabkan oleh gaya vertikal yang terjadi pada caisson.Persamaan matematis komponen mom en tersebut dapat dinyatakan sebagai berikut:
cos
kbsin
fl.>t (4.22)MJii.J
juga mempunyai dua bagian yaitu :a
Mom enM.{;u
1 akibat gaya F,.(iiJ1 yang terjadipada
columndan
b. Mom en
M.(ii.h
akibat gaya F,.(ii.\yang terjadi pada caisson.Momen-momen ini dapat dinyatakan dalam bentuk berikut ini:
sin
(1)1 dansin
(1)1 W-11 (4.24) (4.25) (4.26)IV-12
Momen
MJC-l
adalah momen dalam satu phase dengan percepatan orbital gelombang padaarah
heavet_
yang dapat dinyatakan seperti :IV.3.3 KOPEL GAYA SWAY DAN MOMEN ROIL
Displasemen sway, y, dan sudut roll~
cp,
dapat dinyatakan sebagai berikut :1
=
Yo
COS ( (a)t -S,.}
dimana:
Y. == amplitudo gerakan sway.
•· = amplitudo gerakan roll.
eT = phase kelam bat an (phase lags) gerakan sway.
e.,
=
phase kelambatan (phase lags) gerakan roll.(4.28)
(4.29)
· IV-13
(4.30)
dengan
Total kopel gaya sway F., yang disebabkan oleh gerakan roll dapat dinyatakan sebagai berikut :
(4.32)
IV.3.4 FORMUI.ASI GERAK KOPEL SWAY DAN ROLL
Persamaan kopel gerakan sway dan roll dalam kondisi beam sea dapat dinyatakan sebagai berikut :
(4.33)
IV-14
dimana:
A,
= massa tambah gerakan sway ....,
~
.... " p
1t
(~f
+ 2p
h
(
u
K,.
(4.35)J" = mom en inersia massa gerakan roll terhadap 0.
I.
= momen massa inersia massa tam bah gerakan roll terhadap 0. B" = koefisien damping gerakan roll.GM.
=
tinggi m etacentre transversal.W = displasemen SSCH.
(4.36)
(4.37)
dimana:
8z
= nilai korelasi koefisien damping untuk gerakan roll yang diperoleb dari basil experimen SSCH oleb WU (1991), yang mempunyai nilai 0,330.IV-15
T.,
=
periode natural gerakan roll.Berdasarkan pers.( 4. 33) dan pers.( 4.34 ), dapat ditentukan response amplitudo din am is
dan beda phase untuk gerakan sway dan roll.
IV.4 PERSAMAAN GERAK PITCH DAIAM KONDISI HEAD SEA
Pada Gbr. 4.2 dapat dilihat sistem koordinat SSCH dalam kondisi head sea
untuk gerakan pitch pada pusat gravitasi G
Mom en Froude-Kiylov karen a gay a yang terjadi pada caisson dapat dinyatakan
dengan:
M8 (F.K} :1.
=
M8 (F.K} u - M8 (F.KJ11dimana:
Me(F.K)11
=
momen yang terjadi jika tidak ada column.MD
.K)12 = faktor koreksi karena adanya column.Momen-monen ini dapat ditulis sebagai berikut :
IV-16
.11
8 (F.K) 11=
2 p8 {
41 (2b1 )~
L
1-M[cos
o -sin :) sin
6J)f~
sin
(&)t (4.40)dimana:
(4.41)
(4.42)
Mg.K) adalah momen pitch yang disebabkan oleh tekanan P yang terjadi pada column, dapat ditulis :
sin
(&)t (4.43)IV-17
(4.44)
..
M.(tJ
adalah mom en pitch yang terjadi pada SSCH karena gaya dalam satu phase..
dengan percepatan orbital gelombang pada gerakan heave
C.
ditulis :sin
(a)t (4.45)..
Dengan cara yang sama, mom en pitch
M.(t)
yang terjadi pada column dalam satu phase dengan percepatan orbital gelombang padagerakan surgel,
dapat dinyatakan sebagai berikut :(4.46)
Jika kr cukup kecil, maka ~(kr)