Argometer pada Ojek Motor Berbasis
Mikrokontroler
Amien Santoso, Eru Puspita ST.M.Kom
2, Ressa Akbar ST.CCNA
31Mahasiswa D3, Teknik Elektronika, Politeknik Elektronika Negeri Surabaya-ITS, Surabaya 2Staff Pengajar, Teknik Elektronika, Politeknik Elektronika Negeri Surabaya-ITS, Surabaya
3Staff Pengajar, Teknik Elektronika, Politeknik Elektronika Negeri Surabaya-ITS, Surabaya [email protected]
Abstrak
Argometer merupakan sebuah alat untuk mengukur biaya atau banyaknya uang yang wajib dibayar penumpang saat berkendara dengan taksi. Cara perhitungannya didasarkan pada jarak tempuh dan waktu penggunaan.
Hasil yang dicapai dari proyek akhir ini adalah argometer yang dirancang pada ojek motor berbasis mikrokontroler, yang mana secara sistem mengadopsi dari sistem argometer pada taksi. Secara bentuk tampilan akan ada sebuah lcd yang akan mendeteksi berapa harga yang akan di bayar pada pengguna ojek motor.
Titik acuan yang digunakan dalam sistem argometer ini, yakni menggunakan dua sistem pada sensor rotary encoder yang memberikan data berupa output pulsa dan program waktu di dalam ATMega 16 yang berjalan bersamaan ketika alat ini di aktifkan.
Kata kunci : sensor rotary encoder,mikrokontroler ATmega 16, program waktu yang bersamaan ketika di aktifkan.
I. PENDAHULUAN
A. Latar Belakang
Pada era teknologi ini sudah banyak alat yang diciptakan untuk mempermudah aktifitas atau kinerja pada manusia. Bahkan pada dunia elektronikapun sudah bukan sebagai kebutuhan sekunder melainkan sudah menjadi kebutuhan primer. Dalam hal ini untuk kebutuhan elektronika juga sangat berpengaruh terhadap sebuah fitur tambahan pada alat transportasi. Salah satu contoh yakni argometer. Dimana fungsi pada argometer itu sendiri adalah sebagai alat untuk menampilkan harga dan waktu yang ditempuh oleh setiap jasa pengguna angkutan umum. Argometer juga bisa menjadi sebuah acuan pada pengguna jasa angkutan umum untuk menghindari kecurangan pada supir angkot umum, salah satu contohnya pada supir taxi yang tidak dapat semena - mena membuat tarif atau harga semaunya. Karena pada setiap perusahaan tarif angkutan umum telah membuat ketentuan atau standarisasi tarif angkutan umum.
Berdasarkan dari pengalaman tersebut pada proyek akhir ini menciptakan sebuah alat ”Argometer pada Ojek Motor” yang mana secara sistem sama – sama menampilkan harga seperti argometer pada taxi. Namun untuk metode operasional seperti sistem perhitungan atau perumusan harga, bentuk alat dan sistem mekanisme menyesuaikan pada sepada motor.
B. Perumusan Masalah
Adapun perumusan masalah yang akan dibahas dalam proyek akhir adalah sebagai berikut :
1. Bagaimana membuat sistem alogritma pemrograman alat ukur jarak yang ditempuh pada sepeda motor dengan kecepatan dan waktu tempuh pada sepeda motor tersebut.
2. Bagaimana membuat perancangan atau desain sensor rotary encoder dengan baik secara output pada sensor jarak dan kecepatan yang akan masuk ke mikrokontroler untuk diproses lebih lanjut.
3. Bagaimana cara menetukan jumlah banyak lubang pada rotary agar bisa presisi dalam pengkuran.
4. Bagaimana cara menghitung pulsa kebentuk rupiah.
D. Batasan Masalah
1. Pada proyek akhir ini juga menggunakan sensor rotary encoder untuk menghitung jumlah perputaran poros roda motor yang nantinya output pada rotary encoder yang berupa pulsa tersebut di prosess dalam mikrokontroler dan dalam alat tidak menampilkan jumlah banyaknya putaran hanya pengkoversian harga dari output pulsa. 2. Sistem kerja argometer dengan kecepatan
rata-rata 40 kilometer perjam dalam tingkat kemacetan normal dan dengan asumsi bensin tidak termasuk hitungan biaya argometer. 3. Jarak waktu tempuh penumpang akan
dikenakan biaya tambahan yakni per 1 menit akan bertambah Rp 100,- .
II. TEORI PENUNJANG
A. Mikrokontroler ATMega 16
Mikrokontroler AT mega 16 adalah sebuah fitur mikrokontroler generasi AVR (Alf and Vegard’s Risk processor). ATMega16 berbasis pada arsitektur RISC (Reduced Instruction Set Computing), dimana satu instruksi dapat dieksekusi dalam satu clock, dan dapat mencapai 1 MIPS (Million Instruction Per Second) per MHz. Mikrokontroler ATMega16 memiliki keistimewaan dibanding jenis mikrokontroler AT89C51, AT89C52, AT80S51, dan AT89S52 yaitu pada mikrokontroler ATMega16 memiliki port input ADC 8 channel 10 bit.
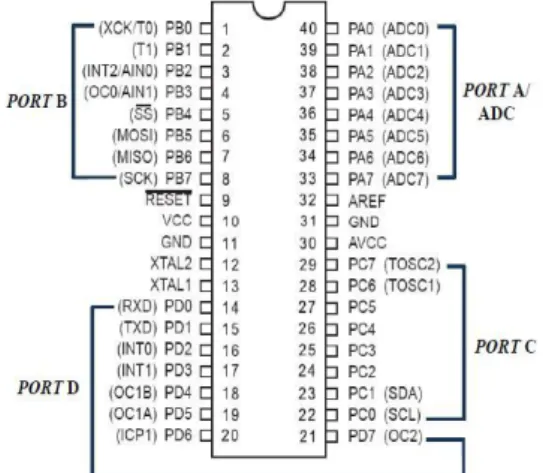
Mikrokontroler ATMega16 memiliki 40 pin kaki dengan konfigurasi sebagai berikut :
Gambar 2.1 Konfigurasi pin ATMega 16
Beberapa fitur Fitur yang tersedia dalam mikrokontroler ATMega16, yaitu :
a) Frekuensi clock maksimum 16 MHz.
b) Jalur I/O 32 buah, yang terbagi dalam port A, port B, port C, dan port D.
c) Analog to Digital Converter (ADC) 10 bit sebanyak 8 input.
d) Analog to Digital Converter (ADC) 10 bit sebanyak 8 input.
e) CPU 8 bit yang terdiri dari 32 register. f) Watchdog timer dengan osilator internal. g) SRAM internal sebesar 1K byte.
h) Memori flash sebesar 8Kbyte dengan kemampuan read while write.
i) Interrupt internal maupun eksternal.
j) Port komunikasi SPI (Serial Pheripheral Interface)
k) EEPROM (Electrically Erasable Program-mable Read Only Memory) sebesar 512 byte yang dapat diprogram saat operasi.
l) Analog komparator.
m) Komunikasi serial standar USART dengan kecepaatan maksimal 2,5 Mbp.
B. Rotary Encoder
Rotary encoder adalah komponen elektromekanik yang dapat memonitor gerakan dan posisi. Rotary encoder umumnya menggunakan sensor optik untuk menghasilkan serial pulsa yang dapat diartikan menjadi gerakan, posisi, dan arah. Sehingga posisi sudut suatu poros benda berputar dapat diolah menjadi informasi berupa kode digital oleh rotary encoder untuk diteruskan oleh rangkaian kendali. Rotary encoder umumnya digunakan pada pengendalian robot, motor drive, dsb. Yang menjadi pilihan untuk proyek ini adalah Incremental Encoder. Rotary Encoder Relatif (sering disebut juga Incremental Encoder) digunakan ketika metode pengkodean absolut tidak bisa digunakan (disebabkan ukuran dan bentuk piringan/cakram). Metode ini juga menggunakan piringan yang dipasang pada poros, tetapi ukuran piringan/cakram kecil, dengan jumlah garis radial yang banyak, seperti jeruji roda.
Gambar 2.2 Bentuk fisik incremental encoder
C. Rangkaian Schmit Trigger
Schimitt triger pada dasarnya adalah komparator dengan 2 nilai pembanding (upper trip point/UTP dan lower trip point/LTP). Bekerjanya sebagai berikut. Misalkan sinyal digital dimasukan ke schmitt triger. Pada saat sinyal berada di logika 1, maka output schmitt trigger harus 1 juga (tergantung jenis, kalau dgital buffer input dan output dama, tapi kalau inverter, outputnya kebalikan input). Apabila sinyal tersebut mendapat gangguan noise sehingga level menjadi turun, maka selama levelnya masih diatas LTP, output akan tetap. Kebalikannya jika sinyal berada di logika rendah, pada saat sinyal mendapat noise dan lebel jadi naik, maka selama level tidak melebihi UTP,output akan tetap.Jadi schmitt triger akan menghilangkan pengaruh noise tersebut. Aplikasinya biasanya ada di bagian input suatu sistem.Trigger Schmit merupakan komperator regeneratif yang berfungsi sebagai pembanding dengan umpan balik positif. Untuk mengubah tegangan masuk yang perubahannya sangat lambat kedalam keluaran yang berubah tajam bentuk gelombangnya (hampir tiodak kontinyu) dan timbul tepat pada harga tertentu dari tegangan masuk diperlukan rangkaian pemicu schmit dimana sinyal masuk dapat diambil sembarang selama bentuk gelombangnya
peroidik dengan amplitudo cukup besar untuk melewati titik perpindahan atau batas jangkauan histerissis (VH) sehingga menhasilkan keluaran gelombang persegi. Pada dasarnya rangkaian pemicu schmit op-amp seperti terlihat pada gambar 2.30, dimana adanya pembagian tegangan seghingga diperoleh umpan balik positif. Bila tegangan keluaran mengalami kejenuhan positif, maka tehamgam positif diumpamakan kembali ke masukan tak membalik, masukan positif ini menjaga keluaran pada keadaan tinggi. Sebaliknya, bila tegangan masuk mengalami kejenuhan negatif diumpamakan kembali kemasukan tak membalik dan keluaran pada keadaan rendah. Dalam hal ini umpan balik positif memperkuat keadaan keluaran yang ada, jadi faktor umpan balik adalah :
Bila keluaran mengalami kejenuhan positif, tegangan acuan yang diterapkan pada masukan tak membalik adalah :
Vacu = + B.Vjen
Bila keluarannya mengalami kejenuhan negatif, tegangan acuan adalah :
Vacu = - B.Vjen
Gambar 2.3 (a) Pemicu Schmit (b) Histerisis
III. PERANCANGAN DAN PEMBUATAN SISTEM
Gambar 3.1 Blok Diagram
A. Gambaran Umum
Sistem dari kenerja alat ini yakni sensor akan memberikan sebuah data berupa output pulsa yang akan di kirimkan ke Mikrokontroler ATMega 16 untuk di proses, namun sebelum di kirim ke mikrokontroler akan melewati rangkaian schmit trigger atau rangkaian pemicu jika pada saat sinyal berada di logika 1, maka output schmitt trigger harus 1 juga (tergantung jenis, kalau dgital buffer input dan output dama, tapi kalau inverter, outputnya kebalikan input). Apabila sinyal tersebut mendapat gangguan noise sehingga level menjadi turun, maka selama levelnya masih diatas LTP, output akan tetap. Kebalikannya jika sinyal berada di logika rendah, pada saat sinyal mendapat noise dan lebel jadi naik, maka selama level tidak melebihi UTP,output akan tetap.Jadi schmitt triger akan menghilangkan pengaruh noise tersebut.
Ketika sebuah alat argometer tersebut di on kan maka timer / waktu akan menghitung berapa lama durasi yang akan dicapai. LCD akan menampikan Harga.
Gambar 3.2 Sensor rotary encoder pada roda motor Perancangan untuk pemasangan pada sensor ini menggunakan bahan alumunium untuk perekat encoder yang akan siap mendeteksi jumlah lubang untuk dan menghitung jumlah putaran yang sudah terlewati oleh sensor encoder. Dimana dalam diameter dari roda as depan 50 cm. Jadi setiap kali berputar 1,57 meter.
Gambar 3.6 ATMega 16 B. Rangkaian schmit trigger
Pada dasarnya rangkaian schmit trigger ini sebagai rangkaian penunjang pada untuk memicu untuk ketika rangkain tersebut memiliki output pulsa yang berada di titik tengah – tengah namun mendekati posisi aktif high maka akan dideteksi aktif high begitu juga sebaliknya.
Gambar 3.9 Rangkaian schmit trigger
C. Rangkaian switching
Rangkaian regulasi tegangan yang baik tidaklah sederhana dan pada kesempatan kali ini akan dibahas mengenai power supply dengan rangkaian regulasi switching. Power supply dengan regulasi switching ini lebih dikenal sebagai power supply switching. Kelebihan power supply switching adalah efisiensi daya yang besar sampai sekitar 83% jika dibandingkan dengan power supply dengan regulasi biasa yang menggunakan sejenis LM 7805.
Gambar 3.11 Switching Dc to Dc
Efisiensi yang rendah pada regulator sejenis LM7805 dikarenakan kelebihan tegangan input regulator akan dirubah menjadi panas sehingga sebagian besar daya input akan hilang karena dirubah menjadi panas tersebut. Bagaimanapun juga semua regulator harus mendapatkan tegangan input yang lebih tinggi daripada tegangan regulasi output untuk mendapatkan tegangan yang teregulasi.
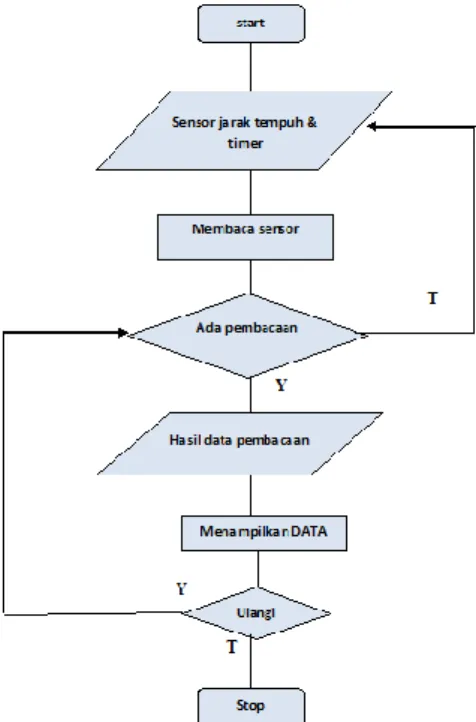
D. Digram Alir Sistem
Metode diagram alir sistem ini yakni awal dari kinerja alat yang bermulai dari sensor, sampai menuju Lcd / tampilan.
IV. HASIL DAN ANALISA
A. Uji Coba Pengiriman data dari optocoupler U Pengujian rangkaian pada optocoupler U yakni memasukkan pada port interupt yang akan di counter terus menerus untuk menampilkan output pulsa yang akan di proses ke dalam mikrokntroler dan dari percobaan tersebut sudah berhasil.
Optocoupler U mengeluarkan 1 ouput pulsa yang mana secara perhitungannya jumlah roda dalam sekali berputar mengeluarkan 1 ouput pulsa yang mana sesuai pada jumlah banyaknya lubang pada rotary.
Pada pengujiannya yakni dengan cara optocoupler U dengan cara ditutup dan di buka transmitter dan receiver.
Gambar 4.1 Pengujian Optocoupler U aktif low Saat pengujian ini di lakukan dengan cara optocoupler berada dalam keadaan terbuka / terkena cahaya antara transmitter dan receiver yang terdeteksi dalam keaadaan aktif low yakni 0,12 berarti pada saat 0,18 maka data tersebut berada pada titik ground.
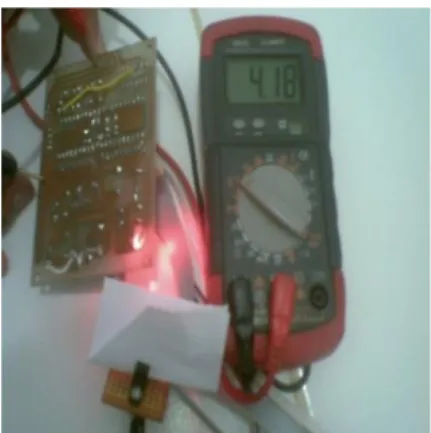
Gambar 4.2 Pengujian Optocoupler U aktif high
Pembuktian pada aktif high yakni pada tegangan 4,18 dimana pada tahap tersebut keaadaan pada optocoupler U tertutup atau sensor transmiter tidak dapat mengirim sinyal pulsa ke reciever.
V
. PENUTUP
A. Kesimpulan
Setelah melakukan uji coba pada argometer ini maka memperoleh kesimpulan bahwa :
1. Argometer ini menggunakan sistem sensor optocoupler U yang mana akan maberikan output berupa pulsa yang akan di konversikan dalam bentuk harga
2. Ada penambahan waktu pada program jika alat argometer ini di on kan dimana juga berpengaruh untuk biaya tambahan setiap 1 menit argometer itu di jalankan.
3. Untuk menentukan jumlah putaran pada roda harus menghitung duliu luas dari range roda motor. Dan juga jumlah lubang pada rotary.
B. Saran
Dalam pembuatan argometer ini terdapat banyak sekali kekurangan yang karena keterbatasan waktu, biaya serta pikiran, tidak dapat dilakukan. Maka untuk tahap pengembangan selanjutnya, ada beberapa hal yang penulis inginkan untuk diperbaiki diantaranya:
1. Alat ini hanya bisa mengkonversi dalam bentuk pulsa bukan jarak yang sesungguhnya.
2. Agometer ini juga belum bisa mengidentifikasi arah dari poros roda motor apakah mundur atau maju.
3. Sistem dari sensor sangatlah rentan rusak bila terkena air, karena tidak ada lapisan penutupnya.
4. Sensor tidak akan berjalan presisi apabila ada goncangan.
DAFTAR PUSTAKA
[1] http:// iswanto.blogspot.com. di akses pada November, 25, 2010, 9:16:10 AM
[2] http:// arwinda_rizkiawan.html di akses pada Januari, 07, 2011, 11:19:10 AM
[3] . http:// www.wikipedia.com
[4] sensor rotary rncoder. www.google.com [5] www.google.com