TANPA PEREDAMAN
Tugas Akhir
Untuk Memenuhi Syarat Sarjana Penyusunan Tugas Akhir
Disusun oleh:
NAMA : GATOT ARI BOWO
NIM : 133010443
PROGRAM STUDI TEKNIK MESIN FAKULTAS TEKNIK
UNIVERSITAS WAHID HASYIM SEMARANG 2016
tentang Pengangkatan Dosen Pembimbing Tugas Akhir, dengan ini:
Nama : Ir. Budi Setiyana, MT Pangkat/Golongan :
Kedudukan : Pembimbing I
Memberikan Soal/Tugas Akhir kepada mahasiswa :
Nama : Gatot Ari Bowo
NIM : 133010443
Program Studi : Teknik Mesin
Topik :PENGUKURAN DAN ANALISIS GETARAN MEKANIS DENGAN VARIASI KONSTANTA PEGAS DAN PUTARAN MOTOR PENGGETAR TANPA PEREDAM
Rincian Soal/Tugas : - Hitung nilai konstanta pegas : - Hitung nilai faktor redaman
: - Hitung nilai frekuensi pribadi pada getaran bebas : - Hitung nilai simpangan maksimum pada getaran paksa
Demikian soal Tugas Akhir ini untuk dapat dilaksanakan sebagaimana mestinya.
Semarang, Februari 2016
Pembimbing I
(Ir. Budi Setiyana, MT)
DENGAN VARIASI KONSTANTA PEGAS
DAN PUTARAN MOTOR PENGGETAR
TANPA PEREDAMAN
Telah diperiksa, disetujui dan dipertahankan dihadapan Dewan Penguji Tugas Akhir Program Studi Teknik Mesin Fakultas Teknik
Universitas Wahid Hasyim Semarang
Pada :
Hari : Jumat
Tanggal : 12 Februari 2016
Menyetujui: Menyetujui:
Dosen Pembimbing I Dosen Pembimbing II
Ir
. Budi Setiyana, MT Darmanto, ST., M. Eng NIP. 196503131991021001 NIP. 05.04.1.0112
MEKANIS DENGAN VARIASI KONSTANTA PEGAS DAN PUTARAN MOTOR PENGGETAR TANPA PEREDAM
Telah dipertahankan dan direvisi di depan Dewan Penguji Tugas Akhir Program Studi Teknik Mesin Fakultas Teknik Universitas Wahid Hasyim Semarang
1. Penguji 1
Nama : Ir. Budi Setiyana, MT. Tanggal Pengesahan : 15 Februari 2016
Tanda Tangan :...
2. Penguji 2
Nama : Imam Syafa’at, ST., MT. Tanggal Pengesahan : 13 Februari 2016
Tanda Tangan :...
3. Penguji 3
Nama : Sri Mulyo Bondan Respati, ST., MT. Tanggal Pengesahan : 13 Februari 2016
Tanda Tangan :...
4. Penguji 4
Nama : H. Helmy Purwanto, ST., MT. Tanggal Pengesahan : 13 Februari 2016
Tanda Tangan :...
Semarang, Februari 2016
Mengetahui
Ketua Program Studi
(Darmanto, ST., M.Eng)
Nama : Gatot Ari Bowo NIM : 133010443 Program Studi : Teknik Mesin
Menyatakan bahwa tugas akhir tidak merupakan jiplakan dan juga bukan dari karya orang lain.
Semarang, 07 Februari 2016 Pembimbing I
Dr. Achmad Widodo, ST,MT NIP.197307021999031001
Yang menyatakan
Gatot Ari Bowo
HALAMAN MOTTO & PERSEMBAHAN
Hanya Perlu Bersabar dan Berserah Diri
PERSEMBAHAN
Laporan Tugas Akhir Ini Ku Persembahkan Kepada Kedua Orangtuaku Yang Kuhormati dan Kucintai, Istriku Yang Sholehah Dan Ketiga Anak-Anakku Yang
Selalu Menyejukkan Hatiku
PRAKATA
Pada kesempatan ini, dengan segala kerendahan hati penulis mengucapkan banyak terima kasih kepada:
1. Ir. Budi Setiyana, MT selaku dosen pembimbing I, yang telah membantu dan memberikan banyak masukan atau saran dalam penyusunan Tugas Akhir ini.
2. Darmanto, M.Eng selaku dosen pembimbing II, yang juga telah membantu dan memberikan banyak masukan dalam penyusunan Tugas Akhir ini.
Akhir kata, penulis menyadari masih banyak kekurangan dalam penyusunan Tugas Akhir ini. Oleh karena itu, penulis membuka pintu selebar-lebarnya bagi sumbangan saran serta kritik yang bersifat membangun demi sempurnanya Tugas Akhir ini. Penulis berharap semoga karya ini dapat bermanfaat. Terima kasih.
Semarang, Februari 2016
Penulis
sebuah alat pengujian getaran mekanis yang belum pernah dilakukan pengujian. Untuk itu perlu dilakukan penelitian terhadap alat tersebut dengan tujuan untuk mengetahui pengaruh dari ketiga pegas terhadap nilai konstanta pegas (k), nilai faktor peredaman (), nilai frekuensi pribadi (n) dengan cara pengukuran dan perhitungan serta mengetahui besarnya nilai simpangan maksimum (Xmak) pada getaran paksa terhadap tiga pegas yang digunakan. Metode penelitian ini dilakukan dengan memakai tiga macam pegas yang berbeda ukuran diameter kawat pegas tersebut. Dari hasil penelitian tersebut didapatkan bahwa nilai konstanta pegas (k) pada pegas A adalah sebesar 646,67 N/m, nilai konstanta pegas (k) pada pegas B adalah sebesar 2517,71 N/m sedangkan nilai konstanta pegas (k) pada pegas C adalah sebesar 3538,96 N/m. Untuk faktor peredaman () pada pegas A sebesar 1,917.10−2 , pada pegas B sebesar 2,186.10−2 dan pada pegas C sebesar 3,152.10−2 . Untuk nilai frekuensi pribadi ( ω
n ) pada
pengukuran pegas A sebesar 14,8 rad/s, pegas B sebesar 20,43 rad/s dan pegas C sebesar 30,54 rad/s, sedangkan nilai frekuensi pribadi ( ωn ) pada perhitungan pegas A sebesar 13,033 rad/s, pegas B sebesar 25,72 rad/s dan pegas C sebesar 30,49 rad/s. Untuk hasil simpangan maksimum (Xmak) pada pegas A sebesar 36,48 mm pada putaran motor sebesar 125 rpm, pegas B sebesar 40,49 mm pada putaran motor sebesar 149 rpm dan pegas C sebesar 42,28 mm pada putaran motor sebesar 226 rpm.
Kata kunci: konstanta pegas, faktor peredaman, frekuensi pribadi, simpangan
HALAMAN PENGESAHAN ...iii
HALAMAN PENGESAHAN UJIAN/REVISI ...iv
HALAMAN PERNYATAAN...v
HALAMAN MOTTO & PERSEMBAHAN...vi
PRAKATA...vii
ABSTRAKSI...viii
DAFTAR ISI...ix
DAFTAR GAMBAR...xii
DAFTAR TABEL...xiv
DAFTAR SIMBOL...xv
BAB I...1
PENDAHULUAN...1
I.1. Latar Belakang...1
I.2. Rumusan Masalah...1
I.3. Batasan Masalah...1
I.4. Tujuan...2
I.5. Manfaat...2
BAB II...3
DASAR TEORI...3
II.1. Tinjaun Getaran...3
II.2. Parameter Getaran...3
II.3. Linieritas dan Pendekatan
...5
II.4 Jenis-Jenis Getaran...5
II.4.4 Getaran Paksa Tanpa Redaman...11
II.5. Getaran Bebas Pada Beam...15
II.6. Getaran Paksa Pada Beam...17
II.7. TinjauanAmplitudo...19
BAB III...20
METODE PENELITIAN...20
III.1 Diagram Alir Penelitian
...20
III.2
Peralatan Pengujian dan Peralatan Pendukung...21
III.2.1. Alat Pengujian Getaran
...21
III.2.2. Alat Pendukung Pengujian
...26
III.3. Prosedur Pengujian...30
III.3.1. Prosedur Pengujian Konstanta Pegas
...30
III.3.2. Prosedur Pengujian Getaran Bebas
...31
III.3.3. Prosedur Pengujian Getaran Paksa
...32
BAB IV...34
PENGUJIAN GETARAN...34
IV.1.
Spesifikasi Alat Uji Getaran Mekanis...34
IV.2. Perhitungan Konstanta Pegas
...34
IV.2.1. Perhitungan Konstanta pegas A
...35
IV.2.2. Perhitungan Konstanta pegas B
...35
IV.2.3. Perhitungan Konstanta pegas C
...36
IV.2.4. Analisis Perhitungan Konstanta Pegas pada Pegas A, Pegas B dan Pegas C
...36
IV.3. Pengukuran Frekuensi Pribadi (ωn) Pada Getaran Bebas...37
IV.3.1. Pada Pegas A...37
IV.4. Perhitungan Frekuensi Pribadi (ωn) Pada Getaran Bebas
...42
IV.4.1. Pada pegas A...42
IV.4.2. Pada pegas B...42
IV.4.3. Pada pegas C...43
IV.4.4. Analisis Nilai Perhitungan Frekuensi Pribadi (ωn) Pegas A, Pegas B dan Pegas C pada Getaran Bebas
...43
IV.5. Analisis Frekuensi Pribadi (ωn) Pegas A, Pegas B dan Pegas C antara Pengukuran dan Perhitungan Pada Getaran Bebas
...44
IV.6. Hasil Putaran Motor (rpm) terhadap Simpangan (x) pada Getaran Paksa
...46
IV.6.1. Pada Pegas A...46
IV.6.2. Pada Pegas B...48
IV.6.3. Pada Pegas C...49
IV.7. Analisis Perbandingan Putaran Motor (rpm) terhadap Simpangan (x) Pegas A, Pegas B dan Pegas C pada Getaran Paksa
...50
BAB V...52
PENUTUP...52
V.1 Kesimpulan...52
5.2 Saran...53
DAFTAR PUSTAKA...xvi
Gambar II.3 Pendulum yang Berayun...5
Gambar II.4 Sistem Pegas Massa...6
Gambar II.5 Model Sederhana Getaran Tanpa Redaman...7
Gambar II.6 Diagram Gaya bebas...7
Gambar II.7 Sistem Massa Pegas...9
Gambar II.8 Respon sistem dengan satu derajat kebebasan...10
Gambar II.9 Model fisik getaran paksa...11
Gambar II.10 Bentuk gaya-gaya pengeksitasi...12
Gambar II.11 Sistem Massa pegas terkena gaya paksa...13
Gambar II.12 Perbandingan Magnifikasi...14
Gambar II.13 Sketsa Sistem Getaran...15
Gambar II.14 Getaran Bebas Pada Beam...16
Gambar II.15 Getaran Paksa Pada Beam...17
Gambar III.1 Diagram Alir Penelitian...20
Gambar III.2 Alat uji getaran mekanis...21
Gambar III.3 Motor DC dan busur sudut...21
Gambar III.4 Beam...22
Gambar III.5 Pegas...23
Gambar III.6 Massa Pemberat...23
Gambar III.7 Mikrometer Skrup...24
Gambar III.8 Platina Kontak...24
Gambar III.9 Baut Pembatas linieritas...25
Gambar III.10 Motor Penggulung Kertas...25
Gambar III.11 Pemegang Pena dan Pena Plotter...25
Gambar III.12 Inverter speed control...26
Gambar III.13 Tachometer digital display...27
Gambar III.14 Panel...27
Gambar III.15 Lampu Indikator...28
Gambar IV.2 Nilai konstanta pegas pada pegas A, pegas B dan pegas C...37
Gambar IV.3 Grafik getaran bebas Pegas A...38
Gambar IV.4 Grafik getaran bebas Pegas B...39
Gambar IV.5 Grafik getaran bebas Pegas C...40
Gambar IV.6 Nilai Pengukuran Frekuensi Pribadi (ωn) pada pegas A, pegas B dan pegas C pada getaran bebas...41
Gambar IV.7 Sketsa alat pengujian getaran bebas...42
Gambar IV.8 Nilai perhitungan frekuensi pribadi (ωn) pegas A, pegas B dan pegas C pada getaran bebas...43
Gambar IV.9 Hasil perbandingan frekuensi pribadi (ωn) pegas A, pegas B dan pegas C pengukuran dan perhitungan pada getaran bebas...45
Gambar IV.10 Diagram Benda Bebas pengujian getaran paksa...46
Gambar IV.11 Grafik putaran motor (rpm) terhadap simpangan (x) pada pegas A ...47
Gambar IV.12 Grafik putaran motor (rpm) terhadap simpangan (x) pada pegas B ...48
Gambar IV.13 Grafik putaran motor (rpm) terhadap simpangan (x) pada pegas C ...49
Gambar IV.14 Grafik perbandingan putaran motor (rpm) terhadap simpangan (x) pada pegas A, pegas B, pegas C pada getaran paksa...49
Tabel II.2 Kesalahan Sin = ...19
Tabel III.1 Data Pegas untuk pengujian...29
Tabel IV.1 Tabel hasil perhitungan konstanta pegas A, pegas B dan pegas C...36
Tabel IV.2 Hasil pengukuran dan perhitungan frekuensi pribadi (ωn) pegas A, pegas B dan pegas C pada getaran bebas...44
Tabel IV.3 Data pengukuran putaran motor (rpm) dan simpangan (x) pegas A...46
Tabel IV.4 Data pengukuran putaran motor (rpm) dan simpangan (x) pegas B...47
Tabel IV.5 Data pengukuran putaran motor (rpm) dan simpangan (x) pegas C...48
Tabel IV.6 Nilai putaran motor (rpm) dan simpangan maksimum (xmak) pegas A, pegas B dan pegas C pada getaran paksa...50
d Jarak pusat rotasi beam dengan gaya eksitasi meter, (m)
Penurunan logaritmik
-st Defleksi meter, (m)
Fe Gaya eksitasi Newton, (N)
Beda fasa derajat, (°)
k Konstanta pegas N/m
i Panjang beam meter, (m)
m1 Massa motor+pemberat kilogram, (kg)
m2 Massa beam kilogram, (kg)
me Massa tak seimbang kilogram, (kg)
M Perbandingan magnifikasi
-r Jarak massa tak seimbang terhadap pusat rotasi meter, (m)
s Kecepatan kertas cm/menit
Periode detik, (s)
Sudut radian, (')
Frekuensi gaya eksitasi rad/s
d Frekuensi pribadi teredam rad/s
n Frekuensi pribadi rad/s
x Jarak meter, (m)
´
X Kecepatan m/s
´
X Percepatan m/s2
X Simpangan beam milimeter, (mm)
Faktor peredaman
-Z Posisi mikrometer tercatat milimeter, (mm)
Jurusan Teknik Mesin Universitas Wahid Hasyim Semarang memiliki sebuah alat pengujian getaran mekanis yang belum pernah dilakukan pengujian. Untuk itu perlu dilakukan penelitian tentang alat tersebut untuk mengetahui fungsi-fungsi dari beberapa bagian alat tersebut dan pengaruhnya terhadap getaran yang terjadi khususnya pada getaran bebas dan getaran paksa.
I.2. Rumusan Masalah
Alat pengujian getaran mekanis yang dipunyai Jurusan Teknik Mesin Universitas Wahid Hasyim yang belum pernah dilakukan pengujian perlu dilakukan pengujian untuk dapat mengetahui fungsi-fungsi dari beberapa bagian alat tersebut dan pengaruhnya terhadap getaran yang terjadi. Pegas adalah salah satu bagian dari alat pengujian yang ada yang mempunyai pengaruh penting dalam terjadinya getaran pada getaran bebas dan getaran paksa. Untuk mengetahui pengaruh pegas terhadap getaran tersebut perlu dilakukan penelitian dengan variasi beberapa pegas yang berbeda dari sisi diameter kawat pegas dan kekakuan pegas terhadap frekuensi pribadi (n) pada getaran bebas dan besarnya simpangan maksimal (resonansi) pada getaran paksa.
I.3. Batasan Masalah
Pembatasan masalah dalam penyusunan Tugas Sarjana ini yang berjudul “Analisa Pengukuran Getaran Mekanis Dengan Variasi Konstanta Pegas dan Putaran Motor Tanpa Peredaman”, adalah sebagai berikut :
- Peralatan yang digunakan dibatasi hanya pada alat uji getaran mekanis milik Jurusan Teknik Mesin Universitas Wahid Hasyim Semarang
- Pengujian yang dilakukan hanyalah untuk mengetahui nilai konstanta
pegas (k) pada pegas A, pegas B dan pegas C pada alat uji getaran mekanis yang ada, nilai frekuensi pribadi (n) pada getaran bebas dari tiga macam pegas yang digunakan didalam alat getaran mekanis yang sudah dibuat dengan cara pengukuran dan perhitungan dan nilai simpangan maksimum (Xmak) pada getaran paksa terhadap tiga pegas yang digunakan untuk pengujian pada alat getaran mekanis.
I.4. Tujuan
Tujuan yang ingin dicapai dari penelitian ini adalah :
1. Untuk mengetahui nilai konstanta pegas (k) dari tiga macam pegas yang digunakan.
2. Mengetahui nilai faktor redaman () dari tiga macam pegas yang digunakan.
3. Mengetahui nilai frekuensi pribadi (n) pada getaran bebas dari tiga macam pegas yang digunakan didalam alat getaran mekanis yang sudah dibuat dengan cara pengukuran dan perhitungan.
4. Mengetahui besarnya nilai simpangan maksimum (Xmak) pada getaran paksa terhadap tiga pegas yang digunakan untuk pengujian pada alat getaran mekanis.
I.5. Manfaat
Manfaat yang ingin dicapai dari penelitian ini adalah agar hasil dari penelitian ini dapat digunakan sebagai petunjuk bagi mahasiswa lain yang akan melakukan praktikum dengan memakai alat getaran mekanis yang ada di Jurusan Teknik Mesin Universitas Wahid Hasyim Semarang.
III.1. Tinjauan Getaran
Getaran adalah suatu gerak bolak-balik di sekitar kesetimbangan. Kesetimbangan di sini maksudnya adalah keadaan dimana suatu benda berada pada posisi diam jika tidak ada gaya yang bekerja pada benda tersebut. Getaran mempunyai amplitudo (jarak simpangan terjauh dengan titik tengah) yang sama, Gambar II.1 menunjukkan salah satu contoh getaran pada pegas. Banyak sekali aplikasi getaran yang dapat kita jumpai dalam kehidupan sehari-hari. Contohnya getaran pada mobil di waktu berjalan atau waktu mobil diam sedangkan motornya dihidupkan, getaran mesin-mesin produksi seperti mesin frais, getaran pada mesin gerinda atau mesin lainnya (Thomson, 1986).
Gambar II.1 Getaran Pegas (Thomson, 1986)
Pada Gambar II.1 pada posisi pegas A merupakan pegas saat mengalami defleksi plus. Sedangkan pada posisi pegas B merupakan pegas saat mengalami defleksi minus. Sedangkan pada posisi pegas O, pegas tersebut pada kondisi normal, tidak di beri gaya apapun.
Ada beberapa parameter pada Gambar II.2 yang merupakan sistem getaran secara sederhana, berikut beberapa parameter dari getaran yang menjadi tolak ukur :
Gambar II.2 Sistem Getaran Sederhana (Thomson, 1986)
1. Amplitudo
Amplitudo adalah pengukuran skalar (nilai) yang non negatif dari besar osilasi (variasi periodik terhadap waktu dari suatu hasil pengukuran) suatu gelombang. Amplitudo juga dapat didefinisikan sebagai jarak terjauh dari garis kesetimbangan dalam gelombang sinusoidal (panjang gelombang dalam pengujian).
2. Periode
Periode getaran adalah waktu yang digunakan dalam satu getaran dan diberi simbol T. Frekuensi dihitung dengan rumus (Thomson, 1986).
f=1
T≤¿T=
1
f ...(II.1)
Keterangan:
f = Frekuensi (Hertz) T = Periode (Sekon)
Frekuensi getaran adalah jumlah getaran yang dilakukan oleh sistem dalam satu detik atau banyaknya periode getaran dalam satu waktu. Seperti terlihat pada Gambar II.2 (Thomson, 1986).
III.3. Linieritas dan Pendekatan
Kebanyakan getaran yang terjadi pada sistem mekanik merupakan getaran yang tidak linier. Dengan batasan atau asumsi yang ditentukan maka getaran yang tidak linier dapat diselesaikan dengan pendekatan secara linier.
Jika pendulum seperti pada Gambar II.3 mendapat perpindahan sudut sebesar , maka gerak pendulum dapat linier atau tidak bergantung pada amplitudo geraknya.
Untuk gerak rotasional, M0 = I0 θ´
Maka - mg l/2 sin = ( m l2/12 + m l2x l/2) θ´
ini merupakan persamaan differensial tidak linier, karena dari deret Mc Laurin nilai untuk:
Sin = - 3/3! + 5 /5!-Dan Cos = l - 2/2! + 4/4!- ...
Dengan mengasumsikan perpindahan sudut () pendulum kecil, maka Sin 0, dan cos 1, Sehingga persamaan gerak dapat disusun lagi menjadi persamaan differensial linier (Gupta, 1987).
Gambar II.3 Pendulum yang Berayun (Gupta, 1987)
III.4. Jenis-Jenis Getaran
Analisa getaran suatu sistem dapat dinyatakan secara kontinyu dan dengan model diskrit (tak berkesinambungan). Sistem dengan jumlah derajad kebebasan yang tertentu disebut juga sistem diskrit. Selain model fisik, getaran dapat dimodelkan menjadi dua model berdasarkan perilaku getaran, yaitu model linier dan tidak linier. Secara umum getaran dikelompokkan menjadi dua, yaitu: getaran bebas dan getaran paksa. Gaya pemaksa dibedakan menjadi dua, yaitu: deterministic (nilai getaran yang dapat diprediksi) dan non deterministic (nilai yang tak dapat diprediksi). Gaya pemaksa deterministik dapat dibedakan menjadi dua, yaitu gaya periodik harmonik (terjadi secara berulang-ulang dalam waktu yang sama) dan gaya periodik tidak harmonik (terjadi secara tidak berulang-ulang dan tidak dalam waktu yang sama).
II.4.1. Getaran Bebas Dengan Redaman
II.4.2. Getaran Bebas Tanpa Redaman
Getaran bebas terjadi jika sistem berosilasi karena bekerjanya gaya yang ada dalam sistem itu sendiri (inherent) dan jika ada gaya luas yang bekerja. Sistem yang bergetar bebas akan bergerak pada satu atau lebih frekuensi naturalnya, yang merupakan sifat sistem dinamika yang dibentuk oleh distribusi massa dan kekuatannya. Gambar II.4 merupakan sistem pegas massa dan diagram benda bebasnya. Semua sistem yang memiliki massa dan elastisitas dapat mengalami getaran bebas atau getaran yang terjadi tanpa rangsangan luar (Thomson, 1986).
Gambar II.4 Sistem Pegas Massa (Thomson, 1986) Keterangan:
k = konstanta pegas (N/m) m = massa pemberat (kg) w = gaya pemberat (N) x = simpangan (mm)
pegas Fs sebanding dengan panjang peregangan x, sesuai dengan hukum
Hooke.
Gambar II.5 Model Sederhana Getaran Tanpa Redaman (Thomson, 1986)
Gambar II.6 Diagram Gaya Bebas (Thomson, 1986)
Berikut beberapa turunan rumus dari frekuensi pribadi (Thomson, 1986) :
Fs=−kx=1
2mg ... (II.3)
Σ F=ma=mẍ=md
2
x
d x2=mẍ+kx0 ...(II.4)
Sekarang kita misalkan dari persamaan diatas:
x=Asinωt+Bcosωt ...(II.5)
ẋ=ωAcosωt−ωBsinωt ...(II.7)
ẍ=−ω2Asinωt
−ω2Bcosωt ...(II.8)
ẍ=−ω2x ...
(II.9)
(
k−mω2)
x=0 ...(II.10) Getaran yang terjadi jika nilai x # 0 dapat diperoleh dari(
kx−mω2x)
dan sehingga hasil akhir dari persamaan diatas dapat kita simpulkan menjadi rumus seperti pada dibawah ini (Thomson, 1986) :ω=
√
km¿≫ωn=
√
km (frekuensi pribadi)...(II.11)
π f=2π
T ...
(II.12)
fn= 1
2π
√
k
m ... (II.13)
Keterangan:
ω
n = Frekuensi Pribadiπ = 3, 14
n = Jumlah siklus x0 = Amplitudo awal
Gambar II.7 Sistem Massa Pegas (Meirovitch, 1936)
Dari Gambar II.7 merupakan diagram benda bebas pada pegas yang lain, menggunakan teori hukum II newton dengan memberikan persamaan sebagai berikut:
-k (st + x) + mg = m ´x ... (II.14)
Pada posisi keseimbangan x = 0, maka jumlah gaya haruslah nol sehingga -k st + mg = 0
jadi diketahui bahwa pasangan dari gaya-gaya -kst dan mg pada sisi sebelah kiri dari persamaan gerak akan saling menghilangkan, sehingga diperoleh: m ´x + kx = 0
Uraian ini menyatakan bahwa pendefinisian variabel perpindahan sama dengan nol pada posisi keseimbangan yang melebihi dari posisi defleksi nol dari pegas, maka kita dapat mengabaikan pengaruh gaya-gaya reaksi pada posisi keseimbangan. Hal ini adalah benar untuk semua sistem yang linier. Untuk sistem non linier, semua gaya, termasuk gaya statik yang berhubungan dengan keseimbangan, sebaiknya harus dilibatkan (Meirovitch, 1936).
Pada tabel 2.1 adalah harga dari faktor redaman () dari berbagai material.
Tabel II.1. Macam-macam Harga dari faktor redaman () pada beberapa Material,
Material Faktor Redaman () Peredam kejut pada automobil 0,1 - 1,5
Karet 0,04
Beton 0,02
Paku keling pada struktur baja 0,03
Kayu 0,003
Aluminium canai dingin 0,0002
Baja canai dingin 0,0006
Phosphor bronze 0,00007
Berikut Gambar II.8 menunjukkan perbandingan faktor redaman () dengan amplitudo. Semakin besar faktor redaman () maka semakin kecil amplitudo yang terjadi.
Gambar II.8 Respon sistem dengan satu derajat kebebasan (Risno, 2013)
II.4.3. Getaran Paksa Dengan Redaman
Getaran paksa dengan redaman adalah getaran yang terjadi akibat rangsangan gaya dari luar. Jika rangsangan tersebut berosilasi, maka sistem dipaksa untuk bergetar pada frekuensi rangsangan. Jika frekuensi rangsangan sama dengan salah satu frekuensi natural sistem, maka akan didapat keadaan resonansi (Peristiwa ikut bergetarnya suatu benda karena ada benda lain yang bergetar) dan mengakibatkan osilasi besar mungkin akan terjadi.
Getaran paksa adalah getaran yang terjadi karena rangsangan gaya luar, jika rangsangan tersebut berosilasi maka sistem dipaksa untuk bergetar pada frekuensi rangsangan. Jika frekuensi rangsangan sama dengan salah satu frekuensi natural sistem, maka akan didapat keadaan resonansi dan osilasi besar yang akan mengakibatkan getaran yang sangat besar. Gambar II.9 menunjukan model getaran paksa secara fisik.
Gambar II.9 Model fisik getaran paksa (Gupta, 1987)
Keterangan:
k = Konstanta Pegas (N/m) F = Gaya (N)
C = Koefisien Peredam (N.s/massa)
Walaupun banyak penerapan-penerapan yang berguna dari getaran bebas, namun ada lagi kelompok yang tidak kalah pentingnya dengan masalah dari getaran bebas, yaitu kelompok getaran paksa yang ditimbulkan oleh gaya-gaya gangguan. Gaya dapat diterapkan dari luar atau ditimbulkan dari sistem itu sendiri. Gaya gangguan yang timbul dari sistem itu sendiri dapat berupa massa tak seimbang yang berputar. Getaran paksa dapat juga ditimbulkan oleh gerak dari sistem landasan (pondasi) ( Gupta, 1987).
gerak ditimbulkan atau diatur oleh geraknya sendiri; jadi bila geraknya berhenti maka gaya bolak-balik akan hilang.
Pada sub bab ini hanya akan dibahas getaran paksa saja. Berbagai bentuk dari fungsi gaya F = F (t) dan perpindahan landasan xb = xb (t) dapat dilihat pada Gambar II.10, gaya harmonik seperti pada bagian (a) seringkali ditemui dalam praktek rekayasa, dan pemahaman dari analisis gaya harmonik ini merupakan langkah awal dalam kaji getaran paksa dari bentuk-bentuk yang lebih rumit. Oleh sebab itu, perhatian hanya dipusatkan pada eksitasi (paksaan) yang selaras (harmonik) (Gupta, 1987).
Gambar II.10 Bentuk gaya-gaya pengeksitasi (Gupta, 1987)
- kx - c ´x + F0Sint = m ´x ...
(II.15)
Gambar II.11 Sistem Massa pegas terkena gaya paksa (Gupta, 1987)
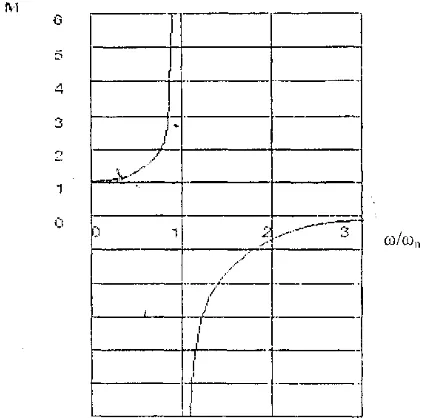
Dengan redaman yang kecil tegangannya akan meluruh, tetapi tidak pernah tereliminir secara sempurna. Solusi khusus xp menggambarkan gerak tetap dan disebut solusi keadaan lunak. Periodenya adalah = 2/, sama seperti fungsi gaya. Hal utama yang paling menarik adalah amplitudo X dari gerak. Kalau kita misalkan st mewakili besarnya defleksi statis pada massa m akibat beban statik F0, maka st = Fo/k, dan dapat pula dituliskan bentuk perbandingan magnifikasinya adalah (Gupta, 1987) ;
M= X
δst=
1 1−ω
2
ωn2
...
(II.16) Keterangan:
M = Magnifikasi
st = Defleksi Statis
kedahsyatan vibrasi. Perhatikan bahwa M mendekati tak berhingga saat
[image:30.595.212.427.432.641.2] mendekati n. hal ini terjadi kalau sistem tidak memiliki redaman dan dieksitasi oleh gaya harmonik yang frekuensi angularnya sebesar dan mendekati frekuensi alamiah n dari sistem, maka M, dan tentunya X akan bertambah besar tanpa batas. Secara phisik, hal ini berarti bahwa amplitudo gerak akan mencapai batas pengikat pegas dan merupakan keadaan yang harus dihindari. Harga n dikenal sebagai frekuensi resonansi atau frekuensi kritis sistem, dan keadaan dari yang mendekati harga n dengan menghasilkan amplitudo perpindahan X yang besar disebut resonansi. Untuk < n faktor magnifikasi (M) adalah positif, dan untuk > n, faktor magnifikasi adalah negative, pada Gambar II.12 menunjukkan kurva dari perbandingan magnifikasi M tersebut (Gupta, 1987).
Gambar II.12 Perbandingan Magnifikasi (Gupta, 1987)
perubahan posisi yang yang besar dari tak terhingga menjadi negatif tak terhingga, dalam hal ini berarti terjadi perubahan beda fasa dan sebuah harga yang mendekati 0° menuju mendekati 180° dan pada saat frekuensi pribadi beda fasanya sebesar 90°. Rumus beda fasa dapat dituliskan seperti rumus yang ada dibawah ini (Gupta, 1987).
φ= 2ξ ω
ω
(
1−ω 2 [image:31.595.176.498.487.705.2]ωn2
)
...
(II.17) Keterangan:
φ = Beda Fasa
st = Defleksi Statis
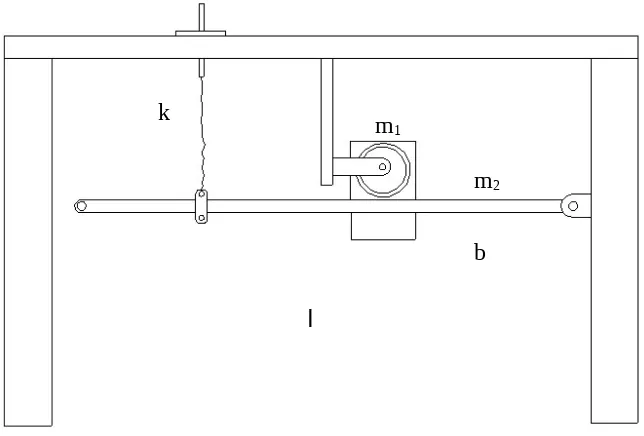
III.5. Getaran Bebas Pada Beam
Berikut sketsa sistem getaran dari alat yang sudah dibuat dan beserta keterangannya.
Gambar II.13 Sketsa Sistem Getaran Keterangan:
m1
m2
l
m1 = Massa motor dan pemberat (kg) m2 = Massa beam (kg)
k = Konstanta pegas (N/m)
b = Jarak pusat rotasi beam dengan gaya eksitasi (m) l = Panjang Beam (m)
Getaran yang terjadi pada beam merupakan getaran benda kaku, dimana pada getaran benda kaku tersebut, variabel yang menjadi salah satu pertimbangan utama adalah rotasi. Jadi prinsip-prinsip mengenai dinamika rotasional memainkan aturan penting dalam menjabarkan persamaan gerak. Pelaksanaan tentang ukuran perpindahan dimulai dari posisi kesetimbangan air statis yang sedikit lebih dari posisi pegas tanpa defleksi. Hal ini dilakukan agar menyederhanakan formulasi untuk sistem linier karena gaya-gaya dan momen-momen yang saling berlawanan dan sama besar yang terkait pada posisi keseimbangan statis dalam analisis akan saling meniadakan.
Gambar II.14 Getaran Bebas Pada Beam (Sriyono, 2002)
Jika pada beam seperti pada Gambar II.14 ditarik sedikit dari posisi kesetimbangannya, maka persamaan kesetimbangan momennya dapat dihitung dengan rumus (Rao, 1984) :
M0 = I0 0 :´
-(kl Sin ) 1 Cos = ( 1/3 m2l2 + m1b2) θ´
ωn=
√
kl2m2l2 3 +m1b
2
¿
√
3kl2
m2l 2
+3m1b
2 ... (II.18)
Jika posisi pegas ditarik dari ujung kanan sejauh x, maka (Rao, 1984):
M0 = I0 0 :´
-(k(l-x) Sin ) (1-x) Cos = (1/3 m2l2 + m1b2) 0´
jika amplitudo getaran cukup kecil, Sin , Cos 1, maka (Rao, 1984) :
(1/3 m2l2 + m1b2) θ´ + k(l-x)2 = 0,
ωn=
√
k(1−x)2m2l 2
3 +m1b 2
¿
√
3k(1−x) 2m2l2
+3m1b2 ...(II.19)
Konstanta pegas bisa dihitung dengan menggunakan rumus dibawah (Thomson, 1986).
k= 1
2lsinø mg ...(II.20)
Keterangan:
k = Konstanta pegas (N/m) m = Massa Bebas (kg)
g = Gravitasi ( 9,8 m/s2)
III.6. Getaran Paksa Pada Beam
Jika beam seperti Gambar II.14 diberi massa pengeksitasi pada jarak b dari pusat O akan tampak seperti Gambar II.15. Gaya eksitasi berupa gaya sentrifugal dari motor yang memutar massa tak seimbang m0 pada radius r yang besarnya adalah mc r 2. Tetapi arah gaya tersebut radial, dan fraksi gaya yang memberikan gaya eksitasi pada sistem getaran dapat dihitung dengan rumus (Rao, 1984) :
Fc = mc r 2 Sin t...(II.21)
Gambar II.15 Getaran Paksa Pada Beam (Sriyono, 2002)
Keseimbangan momen di pusat O dihitung dengan rumus (Rao, 1984) ; -(kl Sin ) 1 Cos + (me r 2 Sin t) = I 0 ...´
(II.22)
´
θk I1
2
sinθ´=me. r . b .❑2sinωt
I
´
θ+ω2sinθ´=me. r . b .❑ 2sinωt
I
Solusi partikuler r = Sin t ´
θ = -2 Sin t
−ω2sint+ωn2sint=me. r . b .❑ 2
sinωt I
(
−ω2+ωn2)
=me.r . b .❑ 2(
−ω2 ωn2 +1)
=me. r . b .❑2
I .ωn
¿ me. r . b .❑ 2
I . ωn
(
1−ω2
ωn2
)
...
(II.23)
❑p= me. r .b .❑ 2
k .12
(
1−ω 2ωn2
)
sinωt
...
(II.24)
Apabila pada beam terdapat faktor redaman sebesar , maka sudut beda fasa dihitung dengan rumus (Rao, 1984) :
❑p= me. r . b .❑
2
√
[
1−(
ω2
ωn
2
)
]
2+
[
2 ωωn
]
2sinωt
...
(II.25)
Dan amplitudonya bisa diperoleh dengan rumus (Rao, 1984) :
Xp
¿ me. r . b .❑ 2
k .12
√
[
1−(
ω 2ωn2
)
]
2 +
[
2 ωωn
]
2 sinωt
...
(II.26)
III.7. Tinjauan Amplitudo
Berdasarkan persamaan deret Mc - Claurin, untuk sin θ=−θ 3
3 +
θ5 5!+
θ7 7!
Dengan kesalahan pendekatan nilai sin = adalah
|
sinθ−θsinθ
|
×100Tabel II.2 Kesalahan Sin =
(°) sin (rad) Kesalahan (%)
0.5 0.008727 0.008727 0.001269 1.0 0.017452 0.017453 0.005077 1.5 0.026177 0.026180 0.011424 2.0 0.034899 0.034907 0.020311
Dari tabel di atas nilai kesalahan untuk simpangan sebesar 2° masih cukup kecil, maka dipilih 2°.
BAB III
METODE PENELITIAN
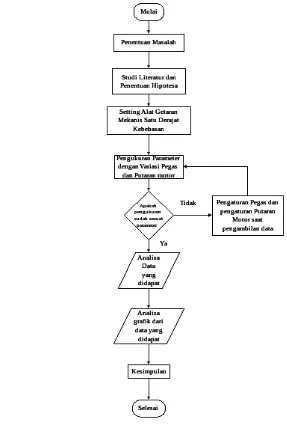
Metode penelitian dirancang untuk bisa memformulasikan pengukuran getaran mekanis dengan variasi perubahan pegas dan rpm. Untuk mencapai tujuan ini, pendekatan eksperimen di tingkat laboratorium dilakukan untuk mensimulasikan kondisi di lapangan. Diagram alir penelitian disajikan pada Gambar III.1.
Gambar III.1 Diagram Alir Penelitian
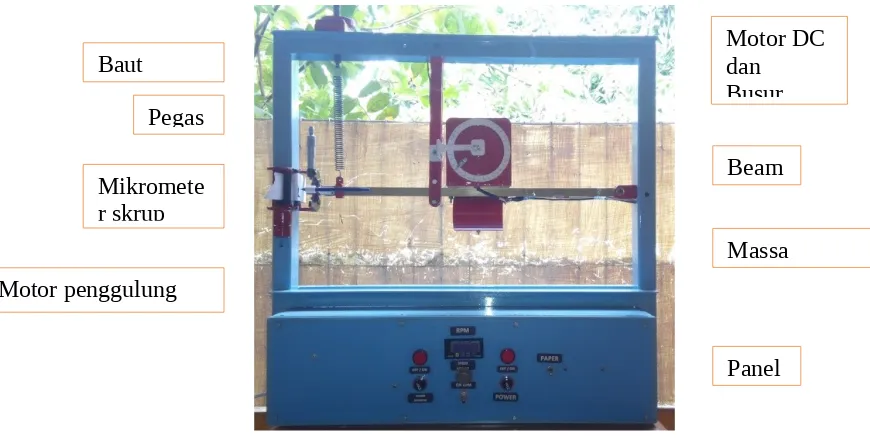
Gambar III.2 Alat uji getaran mekanis
III.2. Peralatan Pengujian dan Peralatan Pendukung III.2.1 Alat Pengujian Getaran
a. Motor DC dan Busur Sudut
[image:38.595.105.540.111.333.2]Motor DC dan busur sudut pada Gambar III.3 digunakan untuk menggerakkan massa tak seimbang yang digunakan untuk mengeksitasi (mempengaruhi) sistem massa pegas untuk bergetar secara paksa. Karena motor yang digunakan harus dapat diatur kecepatan putarnya dengan mudah dan dan cukup halus pertambahan kecepatannya, maka digunakan motor DC.
Gambar III.3 Motor DC dan busur sudut b. Beam
Motor Beam Pegas
Massa Mikromete
r skrup
Motor penggulung kertas
Panel
Busur
Sistem massa pegas pada alat uji getaran mekanis harus dapat diatur perubahan massanya supaya sanggup menunjukkan perbedaan frekuensi pribadi yang diakibatkan oleh perbedaan perbandingan antara konstanta pegas dan massanya. Dalam alat ini massa yang digunakan yaitu beam seperti pada Gambar III.4 dengan penampang bujur sangkar, pengaturan perbedaan massa dilakukan dengan pergeseran posisi dimana pegas dikaitkan. Penggunaan profil bujur sangkar ditujukan supaya motor dan pemegangnya bisa dipasang dengan mudah. Beam yang dipakai adalah dari bahan kuningan.
Gambar III.4 Beam
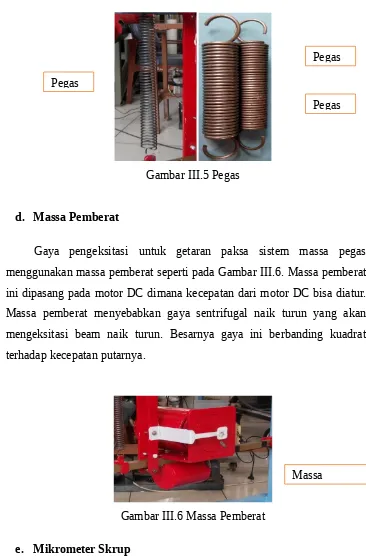
c. Pegas
Untuk bisa menghasilkan getaran, pegas harus mampu memberikan gaya bolak-balik pada massa beam. Walaupun secara teori sebuah pegas mampu memberikan gaya bolak-balik, namun dalam prakteknya pegas hanya dirancang untuk satu arah gaya saja. Dan dikenal pegas tarik dan pegas tekan. Pegas tarik didesain dengan gulungan rapat, sedangkan pegas tekan didesain dengan gulungan renggang. Pegas tarik sama sekali tidak bisa menghasilkan gaya tekan, sedangkan pegas tekan bisa menghasilkan gaya tarik, namun tak sebaik apabila dibandingkan dengan gaya tekannya.
Pada alat uji getaran mekanis digunakan tiga buah pegas tarik seperti pada Gambar III.5 untuk menimbulkan gaya bolak-balik yang sesuai dengan getaran yang di inginkan. Maka dari itu pegas yang digunakan
adalah pegas tarik. Supaya pegas tarik mampu memberikan gaya bolak-balik yang linier, maka pegas harus diberikan preload atau pembebanan awal yang cukup.
Gambar III.5 Pegas
d. Massa Pemberat
[image:40.595.144.510.189.749.2]Gaya pengeksitasi untuk getaran paksa sistem massa pegas menggunakan massa pemberat seperti pada Gambar III.6. Massa pemberat ini dipasang pada motor DC dimana kecepatan dari motor DC bisa diatur. Massa pemberat menyebabkan gaya sentrifugal naik turun yang akan mengeksitasi beam naik turun. Besarnya gaya ini berbanding kuadrat terhadap kecepatan putarnya.
Gambar III.6 Massa Pemberat
e. Mikrometer Skrup Pegas
Massa Pegas
Mikrometer skrup seperti pada Gambar III.7 berfungsi untuk mengukur besarnya simpangan dari beam.
Gambar III.7 Mikrometer Skrup
f. Platina kontak
Platina kontak pada Gambar III.8 adalah berfungsi sebagai saklar listrik ketika mikrometer skrup bersentuhan dengan platina kontak sehingga akan mengalirkan listrik yang menyebabkan lampu indikator menyala.
Gambar III.8 Platina Kontak
Mikromete r skrup
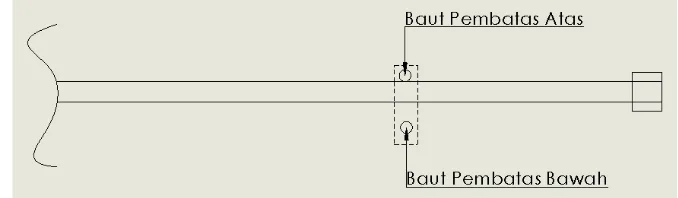
g. Baut pembatas linieritas
Baut pembatas linieritas seperti pada Gambar III.9 ini berfungsi sebagai pembatas beam agar tidak menyimpang terlalu jauh sehingga getaran yang dihasilkan masih dalam keadaan linier.
Gambar III.9 Baut Pembatas linieritas
h. Motor penggulung kertas
Motor penggulung kertas pada Gambar III.10 berfungsi sebagai pemutar penggulung kertas plotter.
Gambar III.10 Motor Penggulung Kertas
i. Pemegang pena dan pena plotter
Pemegang pena dan pena plotter seperti pada Gambar III.11 berfungsi sebagai seperangkat bagian alat untuk menggambarkan getaran yang terjadi pada beam.
Baut pembatas linieritas
Gambar III.11 Pemegang Pena dan Pena Plotter
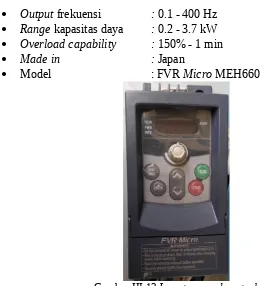
III.2.2 Alat Pendukung Pengujian a. Inverter
Gambar III.12 merupakan Inverter speed control yang berfungsi sebagai variabel frekuensi inverter yang digunakan untuk mengontrol kecepatan secara elektronik dari motor DC induksi. Untuk spesifikasi dari
inverter speed control adalah sebagai berikut: Output frekuensi : 0.1 - 400 Hz Range kapasitas daya : 0.2 - 3.7 kW Overload capability : 150% - 1 min Made in : Japan
Model : FVR Micro MEH660
Gambar III.12 Inverter speed control Pena
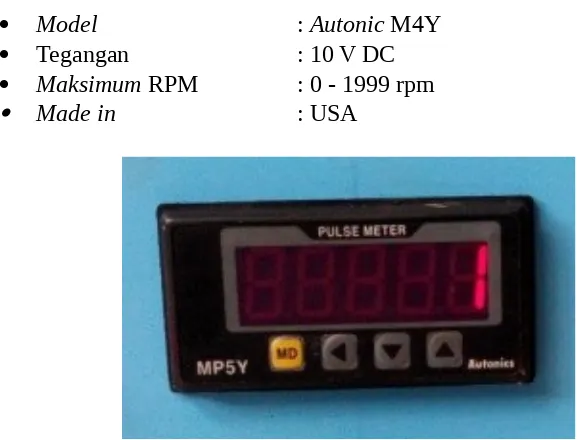
b. Tachometer Display
Gambar III.13 adalah Tachometer digital display yang digunakan untuk menunjukkan besarnya nilai rpm motor yang berputar. Untuk spesifikasi dari tachometer digital display adalah sebagai berikut:
Model : Autonic M4Y
Tegangan : 10 V DC
[image:44.595.181.471.218.438.2] Maksimum RPM : 0 - 1999 rpm Made in : USA
Gambar III.13 Tachometer digital display
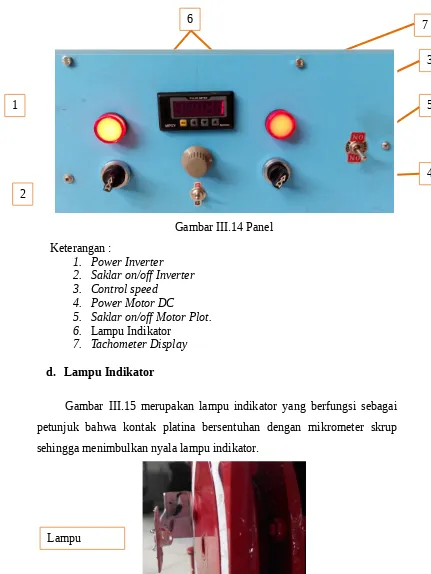
c. Panel
Gambar III.14 Panel Keterangan :
1. Power Inverter 2. Saklar on/off Inverter 3. Control speed
4. Power Motor DC
5. Saklar on/off Motor Plot. 6. Lampu Indikator
7. Tachometer Display
d. Lampu Indikator
Gambar III.15 merupakan lampu indikator yang berfungsi sebagai petunjuk bahwa kontak platina bersentuhan dengan mikrometer skrup sehingga menimbulkan nyala lampu indikator.
Gambar III.15 Lampu Indikator
e. Baut pengatur ketinggian pegas 1
.
2 .
3 .
4 . 5 .
Gambar III.16 menunjukkan baut pengatur ketinggian pegas yang berfungsi untuk mengatur ketinggian pegas dan beam agar bisa seimbang.
Gambar III.16 Baut pengatur ketinggian pegas
III.3. Prosedur Pengujian
Setelah persiapan dilakukan maka alat pengujian getaran siap untuk dilakukan pengambilan data, dimana pada pengujian kali ini yang akan kita lakukan yaitu pengujian getaran bebas dan pengujian getaran paksa. Dengan variasi konstanta pegas untuk pengujian getaran bebas dan variasi putaran motor penggetar (rpm) untuk getaran paksa. Berikut data pegas yang digunakan untuk pengujian seperti pada tabel III.1.
Tabel III.1 Data Pegas untuk pengujian
No. MacamPegas Posisi Pegas dari Ujung Beam Berat Pegas
(Cm) (kg)
1. A 0 0,069489
2. B 0 0,10296
3. C 0 0,1306
III.3.1. Prosedur Pengujian Konstanta Pegas
[image:47.595.165.504.617.716.2]Konstanta pegas tidak dihitung secara teoritis melainkan melalui pengujian secara langsung yaitu dengan memberikan variasi pembebanan kepada setiap pegas, berikut beberapa langkah pengerjaannya sebagai berikut; 1. Menyalakan saklar power utama dari alat uji getaran sehingga lampu indikator pada panel kontrol menyala. Gambar III.17 menunjukkan jika alat pengujian getaran sudah aktif.
Gambar III.17 Saklar Power Utama Menyala
2. Memilih salah satu pegas yang akan dilakukan pengukuran konstanta pegasnya, dikarenakan ada tiga pegas yaitu pegas A, B dan C.
3. Langkah pertama kita gunakan pegas A dan pasang pada baut pemutar. 4. Mengatur pegas A dan memposisikan pada ujung beam dan mengatur
ketinggian pegas dengan memutar baut pemutar hingga beam menyentuh pembatas atas baut linieritas. Seperti terlihat pada Gambar III.18.
Gambar III.18 Posisi Awal beam
5. Turunkan Mikrometer hingga menyentuh kontak platina sehingga lampu indikator berkedip dan kita catat posisi mikrometer pada posisi tersebut dan kita notasikan dengan X1.
6. Setelah tercatat X1, kemudian kita berikan pembebanan pada bagian bawah pengait pegas A dengan pemberat yang sudah kita ketahui beratnya, kemudian kita turunkan mikrometer hingga menyentuh kontak platina sehingga lampu indicator berkedip dan kita catat posisi mikrometer pada posisi tersebut dan kita notasikan dengan X2.
7. Setelah mendapatkan nilai X1 dan X2, kemudian bisa digunakan untuk mencari konstanta pegasnya.
8. Setelah semua prosedur pengujian diatas selesai, ulangi prosedur pengujian nomor 3 sampai dengan nomor 7 dengan pegas B dan pegas C.
III.3.2. Prosedur Pengujian Getaran Bebas
1. Pilih salah satu pegas yang akan dilakukan pengujian dikarenakan ada tiga pegas yaitu pegas A, B dan C.
2. Langkah pertama kita gunakan pegas A dan pasang pada baut pemutar. 3. Setelah itu atur ketinggian beam dengan memutar baut pemutar hingga
beam berada pada tengah-tengah baut pembatas linieritas. 4. Jauhkan mikrometer dengan kontak platina.
5. Atur posisi pena plotter sampai menyentuh gulungan kertas, kemudian goyangkan beam ke atas dan ke bawah sehingga goresan pena plotter
tampak pada kertas.
6. Tekan beam ke bawah tanpa menyentuh batas bawah baut linieritas kemudian lepaskan dan bersamaan dengan itu hidupkan saklar motor penggulung kertas dengan memposisikan saklar On/Off pada posisi On. 7. Amati getaran yang terjadi pada beam sampai getaran tersebut berhenti. 8. Jauhkan pena plotter dari kertas penggulung kemudian matikan motor
penggulung dengan memposisikan saklar On/Off pada posisi Off. 9. Potong kertas penggulung dan ambil hasil plotter getaran.
III.3.3 Prosedur Pengujian Getaran Paksa
1. Pilih salah satu pegas yang akan dilakukan pengujian dikarenakan ada tiga pegas yaitu pegas A, B dan C.
2. Langkah pertama kita gunakan pegas A dan pasang pada baut pemutar. 3. Setelah itu atur ketinggian beam dengan memutar baut pemutar hingga
beam berada pada tengah-tengah baut pembatas linieritas. 4. Jauhkan mikrometer dengan kontak platina.
5. Nyalakan saklar power motor DC hingga lampu indikator pada panel control menyala.
6. Nyalakan saklar Inverter, hingga lampu indikator pada panel menyala dan tunggu hingga terdengar bunyi mendengung dari inverter tersebut. 7. Hidupkan power inverter dengan memposisikan saklar On/Off pada
posisi On sehingga pada display tachometer akan menyala dan muncul angka 0.
8. Putar mikrometer hingga menyentuh kontak platina sehingga lampu indikator berkedip kemudian kita catat posisi mikrometer pada posisi tersebut sebagai simpangan.
9. Jauhkan mikrometer dengan kontak platina.
10. Putar control speed sehingga display tachometer menunjukkan angka ±100.
11. Putar mikrometer hingga menyentuh kontak platina sehingga lampu indikator berkedip kemudian kita catat posisi mikrometer pada posisi tersebut sebagai simpangan.
12. Ulangi langkah nomor 9 sampai dengan nomor 11 dengan menaikkan putaran motor dengan kelipatan ±25 hingga putaran motor mencapai angka ±400.
13. Kemudian ganti pegas A dengan pegas yang lain (B, C), setelah itu ulangi langkah prosedur pengujian nomor 2 sampai dengan nomor 12 hingga selesai.
PENGUJIAN GETARAN
IV.1 Spesifikasi Alat Uji Getaran Mekanis
Massa beam (m2) : 1,92 kg
Panjang beam (l ) : 63 cm = 0,63 m Panjang beam + Pena (lbp) : 65 cm = 0,65 m Jarak Motor dengan Titik pusat beam (b) : 31,5 cm = 0,315 m Massa Motor + dudukan + busur (m1a) : 8,435 kg (Motor DC) Massa Pemegang pena dan pena (ma) : 0,03107 kg
Massa pembebanan untuk defleksi Pegas A (mA) : 0,2 kg Pegas B (mB) : 0,5 kg Pegas C (mC) : 1 kg Massa Pemberat (m1b) : 3,927 kg
Massa Sensor rpm + dudukan (m1c) : 0,0531 kg+0,07077 kg Massa Pegas
Pegas A : 0,069489 kg Pegas B : 0,10296 kg Pegas C : 0,1306 kg Kecepatan Penggulung Kertas (s) : 100 cm/menit Massa Platina + pemegang (mb) : 0,01191 kg
IV.2 Perhitungan Konstanta Pegas
Konstanta pegas tidak dihitung secara teoritis melainkan melalui pengujian secara langsung pada alat uji getaran yaitu dengan memberikan pembebanan pada setiap pegas.
[image:50.595.118.510.569.709.2]Berikut Gambar IV.1 sketsa pengukuran defleksi pegas pada alat uji getaran mekanis yang sudah dibuat.
Gambar IV.1 Sketsa pengukuran defleksi pegas pada alat uji getaran mekanis
IV.2.1 Perhitungan Konstanta pegas A
Didapat hasil dari pengujian diatas pada pegas A diketahui besar dari X1 adalah 47,19 mm dan besar dari X2 adalah 50,32 mm, sedangkan massa pembebanan adalah sebesar 0,2 kg. Maka perhitungan defleksinya adalah:
Deflek si=
(
llbp
)
x(
X2−X1)
=(
6365
)
x(50,32−47,19)=3,034mm=0,003034mUntuk perhitungan Konstanta pegasnya adalah:
k=
(
mA∗gdefleksi
)
=(
0,2kg∗9,81m/s2
0,003034m
)
=646,67N/mIV.2.2 Perhitungan Konstanta pegas B
Didapat hasil dari pengujian diatas pada pegas B diketahui besar dari X1 adalah 48,31 mm dan besar dari X2 adalah 50,32 mm, massa pembebanan adalah sebesar 0,5 kg. Maka perhitungan defleksinya adalah:
Defleksi=
(
llbp
)
x
(
X2−X1)
=(
6365
)
x(50,32−48,31)=1,9482mm=0,0019482m Untuk perhitungan konstanta pegasnya adalah:k=
(
mB∗gdefleksi
)
=(
0,5kg∗9,81m/s2
0,0019482m
)
=2517,71N/mIV.2.3 Perhitungan Konstanta pegas C
Didapat hasil dari pengujian diatas pada pegas C diketahui besar dari X1 adalah 47,19 mm dan besar dari X2 adalah 50,05 mm, sedangkan massa pembebanan adalah sebesar 1 kg. Maka perhitungan defleksinya adalah:
Defleksi=
(
llbp
)
x(
X2−X1)
=(
6365
)
x(50,05−47,19)=2,772mm=0,002772m Untuk perhitungan konstanta pegasnya adalah:k=
(
mC∗gdefleksi
)
=(
1kg∗9,81m/s2
0,002772m
)
=3538,96N/mIV.2.4 Analisis Perhitungan Konstanta Pegas pada Pegas A, Pegas B dan Pegas C
Berikut tabel hasil perhitungan konstanta pegas pada pegas A, pegas B dan pegas C.
Macam Pegas Konstanta Pegas (k)N/m
Pegas A 646,67
Pegas B 2517,71
Pegas C 3538,96
Berikut Gambar IV.2 adalah nilai konstanta pegas (k) pada pegas A, pegas B dan pegas C.
[image:52.595.145.467.268.534.2]Pegas A Pegas B Pegas C 0 500 1000 1500 2000 2500 3000 3500 4000 646.67 2517.71 3538.96 Macam Pegas K o n s ta n ta (N /m )
Gambar IV.2 Nilai konstanta pegas pada pegas A, pegas B dan pegas C
Dari gambar diatas dapat diketahui nilai konstanta pegas (k) pada pegas C mempunyai nilai konstanta pegas (k) yang lebih besar dibandingkan dengan pegas B dan pegas A. Hal itu disebabkan karena pegas C mempunyai diameter kawat yang lebih besar dan lebih kuat dibanding dengan pegas B dan pegas A.
IV.3 Pengukuran Frekuensi Pribadi (ωn) Pada Getaran Bebas
IV.3.1 Pada Pegas A
digoreskan oleh pena berhimpit dengan garis pemandu yang terdapat pada penggulung kertas. Hidupkan motor penggulung kertas dan getaran diperoleh dengan menekan beam ke bawah tanpa menyentuh batas bawah baut linieritas kemudian lepaskan. Gambar IV.3 menunjukkan grafik yang diperoleh seperti dibawah ini:
Gambar IV.3 Grafik getaran bebas Pegas A
Tarik garis vertikal dari gelombang awal dan pada gelombang terakhir yang ditetapkan. Notasikan jarak kedua garis vertikal itu dengan d
dan jumlah gelombang diatara dua garis vertikal tersebut dan notasikan dengan n. Amplitudo dari gelombang pertama kita notasikan dengan x0 dan
amplitudo dari gelombang terakhir yang ditetapkan, notasikan dengan xn.
• Dari Gambar IV.3 grafik getaran bebas Pegas A di dapatkan beberapa parameter pengukuran sebagai berikut: d = 7,15 cm : xo = 10 mm ; xn = 3 mm ; n = 10 ; 1 rpm = 0,10472 rad/s
• Frekuensi pribadi teredam
ω
(¿¿d)=ns
d =
10.100
7,15 =141rpm=14,8rad/s ¿
• Penurunan logaritmik () ¿
lnxo
xn
n =
ln10 3
10 =0,1204
• Faktor redaman ()
0,1204
¿ ❑
√
4π2 +δ2=0,1204
√
4π2+¿2¿=1,917.10
−2
karena sangat kecil maka dianggap ≈ 0 • Frekuensi pribadi (ωn)= ωd
√
1−ξ2 =141
141rpm=14,8rad/s .
IV.3.2 Pada Pegas B
[image:54.595.118.514.344.494.2]Pada getaran bebas kita posisikan ujung pengait pegas B pada ujung beam. Psisikan beam pada keadaan horisontal dengan mengatur ketinggian pegas, posisi horisontal akan diperoleh saat posisi garis yang digoreskan oleh pena berhimpit dengan garis pemandu yang terdapat pada penggulung kertas. Hidupkan motor penggulung kertas dan getaran diperoleh dengan menekan beam ke bawah tanpa menyentuh batas bawah baut linieritas kemudian lepaskan. Gambar IV.4 menunjukkan grafik yang diperoleh seperti di bawah ini:
Gambar IV.4 Grafik getaran bebas Pegas B
Tarik garis vertikal dari gelombang awal dan pada gelombang terakhir yang ditetapkan. Notasikan jarak kedua garis vertikal itu dengan d
dan jumlah gelombang diatara dua garis vertikal tersebut dan notasikan dengan n. Amplitudo dari gelombang pertama dinotasikan dengan x0 dan
amplitudo dari gelombang terakhir yang ditetapkan, dan dinotasikan dengan xn.
• Frekuensi pribadi teredam (ωd)=ns
d =
8.100
4,1 =195rpm = 20,43 rad/s
• Penurunan logaritmik () ¿
lnxo
xn
n =
ln6 2
8 =0,1373
• Faktor redaman ()
0,1373
¿ ❑
√
4π2+δ2=0,1373
√
4π2+¿2¿=2,186.10−2
karena sangat kecil maka dianggap ≈ 0
• Frekuensi pribadi
ω
(¿¿n)= ωd
√
1−ξ2 ¿= 195
√
1−02 = 195rpm = 20,43rad/s.
IV.3.3 Pada Pegas C
[image:55.595.185.440.526.635.2]Pada getaran bebas kita posisikan ujung pengait pegas C pada ujung beam. Posisikan beam pada keadaan horisontal dengan mengatur ketinggian pegas, posisi horisontal akan diperoleh saat posisi garis yang digoreskan oleh pena berhimpit dengan garis pemandu yang terdapat pada penggulung kertas. Hidupkan motor penggulung kertas dan getaran diperoleh dengan menekan beam ke bawah tanpa menyentuh batas bawah baut linieritas kemudian lepaskan. Gambar IV.5 menunjukkan grafik yang diperoleh seperti dibawah ini:
Gambar IV.5 Grafik getaran bebas Pegas C
Tarik garis vertikal dari gelombang awal dan pada gelombang terakhir yang ditetapkan. Notasikan jarak kedua garis vertikal itu dengan d
dengan n. Amplitudo dari gelombang pertama dinotasikan dengan x0 dan
amplitudo dari gelombang terakhir yang ditetapkan, kemudian notasikan dengan xn.
• Dari Gambar IV.5 grafik getaran bebas Pegas C di dapatkan beberapa parameter pengukuran sebagai berikut: d = 2,4 cm : xo = 4 mm ; xn = 1 mm ; n = 7 ; 1 rpm = 0,10472 rad/s
• Frekuensi pribadi teredam (ωd)=ns
d =
7.100
2,4 =292rpm = 30,54 rad/s
• Penurunan logaritmik () ¿
lnxo
xn
n =
ln4 1
7 =0,1980 • Faktor redaman () ¿ ❑
√
4π2+δ2=0,1980
4π2+(0,1980)2=3,152.10
−2
karena sangat kecil maka dianggap ≈ 0
• Frekuensi pribadi
ω
(¿¿n)= ωd
√
1−ξ2¿
= 292
√
1−02 = 292rpm = 30,54rad/s.
IV.3.4 Analisis Nilai Pengukuran Frekuensi Pribadi ( ωn ) Pegas A, Pegas B dan Pegas C pada Getaran Bebas
Berikut Gambar IV.6 adalah nilai pengukuran frekuensi pribadi (
Pegas A Pegas B Pegas C 0 5 10 15 20 25 30 35 40 45 50 14.8 20.43 30.54 Macam Pegas F re k u e n s i P ri b a d i ( ra d /s )
Gambar IV.6 Nilai Pengukuran Frekuensi Pribadi ( ωn ) pada pegas A, pegas B dan pegas C pada getaran bebas
Dari gambar diatas dapat diketahui nilai frekuensi pribadi ( ωn ) dari hasil pengukuran pada pegas C mempunyai nilai frekuensi pribadi ( ωn ) lebih tinggi dibandingkan dengan pegas B dan pegas A. Hal itu disebabkan karena pegas C mempunyai nilai konstanta pegas (k) yang lebih besar dibanding dengan pegas B dan pegas A.
IV.4 Perhitungan Frekuensi Pribadi (ωn) Pada Getaran Bebas
IV.4.1. Pada pegas A
ωn=
√
3.k . l 2(
m2. l 2+3.m1abctot. b
2
+3.mabtot❑.lbp
2
)
ωn=
√
3x646,67x0,632
(1,925
x0,632+3x(12,49)x0,3152+3x0,043x0,652
)
ωn=13,033rad/s❑
[image:58.595.137.526.111.408.2]⇒124,46rpm
Gambar IV.7 Sketsa alat pengujian getaran bebas
IV.4.2 Pada pegas B
Berdasarkan pada alat uji getaran didapatkan data sebagai berikut; k = 2517,71 N/m; l = 0,63 m; mabtot = 0,03107 kg + 0,01191 kg= 0,043 kg; m1abctot = 8,435 kg + 3,927 kg + 0,0531 kg + 0,07077 kg = 12,49 kg; m2 = 1,92 kg; b = 0,315 m; lbp = 0,65 m.
ωn=
√
3.k . l 2(
m2. l 2+3.m1abctot. b
2
+3.mabtot❑.lbp
2
)
ωn=
√
3x2517,71x0,632
(1,925
x0,632+3x(12,49)x0,3152+3x0,043x0,652
)
ωn=25,72rad/s❑
⇒245,6rpm
Berdasarkan pada alat uji getaran didapatkan data sebagai berikut; k = 3538,96 N/m; l = 0,63 m; mabtot = 0,03107 kg + 0,01191 kg= 0,043 kg; m1abctot = 8,435 kg + 3,927 kg + 0,0531 kg + 0,07077 kg = 12,49 kg; m2 = 1,92 kg; b = 0,315 m; lbp = 0,65 m.
ωn=
√
3.k . l 2(
m2. l2+3.m1abctot. b2+3.mabtot❑.lbp2
)
ωn=
√
3x3538,96x0,632
(1,925
x0,632+3x(12,49)x0,3152+3x0,043x0,652)
ωn=30,49rad/s❑
⇒291,16rpm
IV.4.4 Analisis Nilai Perhitungan Frekuensi Pribadi ( ωn ) Pegas A, Pegas B dan Pegas C pada Getaran Bebas
Berikut Gambar IV.8 adalah nilai perhitungan frekuensi pribadi (
ωn ) pada pegas A, pegas B dan pegas C.
[image:59.595.112.467.399.653.2]Pegas A Pegas B Pegas C 0 5 10 15 20 25 30 35 40 45 50 13.03 25.72 30.49 Macam Pegas F re k u e n s i P ri b a d i (r a d /s )
Gambar IV.8 Nilai perhitungan Frekuensi Pribadi ( ωn ) pegas A, pegas B dan pegas C padagetaran bebas
ωn ) lebih tinggi dibandingkan dengan pegas B dan pegas A. Hal itu disebabkan karena pegas C mempunyai nilai Konstanta pegas (k) yang lebih besar dibanding dengan pegas B dan pegas A.
IV.5 Analisis Frekuensi Pribadi (n
) Pegas A, Pegas B dan Pegas C antara
Pengukuran dan Perhitungan pada Getaran Bebas [image:60.595.159.471.447.589.2]Berikut data yang diperoleh di Tabel IV.2 berdasarkan data frekuensi pribadi ( ωn ) antara pengukuran dan perhitungan pada getaran bebas.
Tabel IV.2 Hasil pengukuran dan perhitungan frekuensi pribadi ( ωn ) pegas A, pegas
B dan pegas C pada getaran bebas
Macam Pegas
Frekuensi Pribadi ( ωn ) (rad/s)
Pengukuran Perhitungan
A 14,8 13,033
B 20,43 25,72
C 30,54 30,49
0 5 10 15 20 25 30 35 40 45 50 14.8 13.03 20.42 25.72 30.54 30.49 Pengukuran Pegas A Perhitungan Pegas A Pengukuran Pegas B Perhitungan Pegas B Pengukuran Pegas C Perhitungan Pegas C Macam Pegas F re k u e n s i P ri b a d i ( ra d /s )
Gambar IV.9 Hasil perbandingan frekuensi pribadi ( ωn ) pegas A, pegas B dan pegas
C pengukuran dan perhitungan pada getaran bebas
Dari hasil tabel dan gambar diatas selisih besaran prosentasi nilai frekuensi pribadi ( ωn ) pegas A, pegas B dan pegas C pada pengukuran dan perhitungan adalah sebagai berikut :
a) Pegas A ¿14,8−13,033
14,8 x100=11,93 b) Pegas B ¿20,43−25,72
20,43 x100=[25,95] c) Pegas C ¿30,54−30,49
30,54 x100=0,164
Selisih nilai frekuensi pribadi ( ωn ) pegas A, pegas B dan pegas C antara pengukuran dan perhitungan pada getaran bebas terjadi karena :
Pada pengukuran, titik berat terbagi secara merata sesuai dengan besarnya berat dari masing-masing bagian pada alat uji getaran. Sedangkan pada perhitungan, titik berat ditentukan pada satu titik (0,315 m).
IV.6 Hasil Putaran Motor (rpm) terhadap Simpangan (x) pada Getaran Paksa IV.6.1 Pada Pegas A
Gambar IV.10 Diagram Benda bebas pengujian getaran paksa
Berikut ini data pengukuran putaran motor (rpm) dan simpangan (x) pada getaran paksa.
Tabel IV.3 Data pengukuran putaran motor (rpm) dan simpangan (x) pegas A
Putaran Motor
(rpm)
Simpangan (x) (mm)
Putaran Motor
(rpm)
Simpangan (x) (mm)
0 35,26 250 35,13
100 35,28 275 35,08
125 36,48 301 35,18
151 35,92 326 35,19
177 35,82 350 35,15
199 35,76 376 35,16
224 35,25 400 35,16
[image:62.595.155.494.458.597.2]0 100 200 300 400 0 5 10 15 20 25 30 35 40
Putaran motor (rpm)
[image:63.595.139.503.112.336.2]S im p an g an ( m m )
Gambar IV.11 Grafik putaran motor (rpm) terhadap simpangan (x) terhadap pada pegas A
Dari gambar diatas diperoleh nilai simpangan tertinggi (xmak) sebesar 36,48 mm pada putaran motor 125 rpm.
IV.6.2 Pada Pegas B
Berikut ini data pengukuran putaran motor (rpm) dan simpangan (x) pada getaran paksa.
Tabel IV.4 Data pengukuran putaran motor (rpm) dan simpangan (x) pegas B Putaran Motor (rpm) Simpangan (x) (mm) Putaran Motor (rpm) Simpangan (x) (mm)
0 34,95 249 34,69
100 34,96 275 34,69
125 34,96 301 34,69
149 40,49 326 34,23
175 35,08 350 34,61
200 35,33 375 34,58
[image:63.595.143.479.570.709.2]Dari tabel diatas didapat grafik putaran motor (rpm) terhadap simpangan (x), yang tampak pada Gambar IV.12 dibawah ini.
0 100 200 300 400
0 5 10 15 20 25 30 35 40 45
Putaran Motor (rpm)
[image:64.595.136.519.119.364.2]S im p an g an ( m m )
Gambar IV.12 Grafik putaran motor (rpm) terhadap simpangan (x) pada pegas B
Dari gambar diatas diperoleh nilai simpangan tertinggi (xmak) sebesar 40,49 mm pada putaran motor 149 rpm.
IV.6.3 Pada Pegas C
Berikut ini data pengukuran putaran motor (rpm) dan simpangan (x) pada getaran paksa.
Tabel IV.5 Data pengukuran putaran motor (rpm) dan simpangan (x) pegas C Putaran Motor (rpm) Simpangan (x) (mm) Putaran Motor (rpm) Simpangan (x) (mm)
0 38,28 248 39,34
100 38,20 274 39,68
124 38,24 301 39,66
151 38,30 327 39,41
173 38,94 352 39,45
198 39,78 373 39,98
[image:64.595.143.479.566.705.2]Dari tabel diatas didapat grafik putaran motor (rpm) terhadap simpangan (x), yang tampak pada Gambar IV.13 dibawah ini.
0 100 200 300 400
0 10 20 30 40 50
Putaran Motor (rpm)
S
im
p
an
g
an
(
m
m
[image:65.595.137.474.165.309.2])
Gambar IV.13 Grafik putaran motor (rpm) terhadap simpangan (x) pada pegas C
Dari gambar diatas diperoleh nilai simpangan tertinggi (xmak) sebesar 42,28 mm pada putaran motor 226 rpm.
IV.7 Analisis Perbandingan Putaran Motor (rpm) terhadap Simpangan (x) Pegas A, Pegas B dan Pegas C pada Getaran Paksa
0 50 100 150 200 250 300 350 400 450 0 5 10 15 20 25 30 35 40 45 Pegas A Pegas B Pegas C
Putaran Motor (rpm)
[image:66.595.156.470.482.593.2]S im p an g an ( m m )
Gambar IV.14 Grafik perbandingan putaran motor (rpm) terhadap simpangan (x) pegas A, pegas B dan pegas C pada getaran paksa
Berikut Tabel IV.6 nilai putaran motor (rpm) dan simpangan maksimum (xmak) pegas A, pegas B dan pegas C pada getaran paksa.
Tabel IV.6 Nilai putaran motor (rpm) dan simpangan maksimum (xmak) pegas A, pegas B dan pegas C pada getaran paksa
Macam Pegas
Putaran Motor (rpm)
Simpangan (Xmak)
(mm)
A 125 36,48
B 149 40,49
C 226 42,28
BAB V
KESIMPULAN DAN SARAN
V.1. Kesimpulan
1. Hasil pengujian terhadap nilai konstanta pegas (k) pada pegas A, pegas B dan pegas C adalah sebagai berikut :
c. Nilai konstanta pegas (k) pada pegas C adalah sebesar 3538,96 N/m.
2. Nilai faktor peredaman () pada pegas A, pegas B dan pegas C adalah sebagai berikut :
a. Nilai faktor redaman () pada pegas A adalah sebesar 1,917.10−2 . b. Nilai faktor redaman () pada pegas B adalah sebesar 2,186.10−2 . c. Nilai faktor redaman () pada pegas C adalah sebesar 3,152.10−2 .
3. Nilai frekuensi pribadi ( ωn ) pada pegas A, pegas B dan pegas C dengan cara pengukuran dan perhitungan pada getaran bebas adalah sebagai berikut :
a. Pada Pengukuran :
1. Nilai frekuensi pribadi ( ωn ) pada pegas A adalah sebesar 14,8rad/s .
2. Nilai frekuensi pribadi ( ωn ) pada pegas B adalah sebesar 20,43 rad/s.
3. Nilai frekuensi pribadi ( ωn ) pada pegas C adalah sebesar 30,54
rad/s.
b. Pada Perhitungan :
1. Nilai frekuensi pribadi ( ωn ) pada pegas A adalah sebesar 13,03 rad/s.
2. Nilai frekuensi pribadi ( ωn ) pada pegas B adalah sebesar 25,72 rad/s.
3. Nilai frekuensi pribadi ( ωn ) pada pegas C adalah sebesar 30,49 rad/s.
4. Nilai simpangan maksimum (xmak) pegas A, pegas B dan pegas C pada getaran paksa adalah sebagai berikut :
a. Nilai simpangan maksimum (xmak) pada pegas A adalah sebesar 36,48 mm pada putaran motor sebesar 125 rpm.
b. Nilai simpangan maksimum (xmak) pada pegas B adalah sebesar 40,49 mm pada putaran motor sebesar 149 rpm.
V.2. Saran
1. Perlu dilakukan pengujian getaran dengan melakukan pengukuran beda fase untuk mengetahui fenomena getaran yang sempurna.
2. Perlu dilakukan pengujian getaran dengan variasi peredaman.
Meirovitch, Leonard, 1936, Elements of Vibration Analysis, Second Edition, Mc Graw-Hill, New York.
Rao, SS., 1984, Mechanical Vibration Second Edition, Inventario, Addison-Wesley Publishing Company, California.
Risno, 2013, Laporan Praktikum, Pengujian Getaran Satu Derajat Kebebasan,
Teknik Mesin Universitas Riau, Riau, 14.
Sriyono, 2002, Laporan Tugas Akhir, Pembuatan Alat Peraga Getaran Mekanis Satu Derajat Kebebasan Tanpa Peredam, Teknik Mesin Universitas Diponegoro, Semarang, 16-23.
Thomson, William T., Prasetyo, Lea, 1986, Teori Getaran dengan Penerapan,
Edisi Kedua, Erlangga, Jakarta.