STABILITAS STATIS KAPAL PAYANG MADURA (Kasus pada Salah Satu Kapal Payang di Pamekasan)
RIZKI MULYA SARI
MAYOR TEKNOLOGI DAN MANAJEMEN PERIKANAN TANGKAP DEPARTEMEN PEMANFAATAN SUMBERDAYA PERIKANAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN INSTITUT PERTANIAN BOGOR
BOGOR
2010
PERNYATAAN MENGENAI SKRIPSI DAN SUMBER INFORMASI
Dengan ini saya menyatakan bahwa skripsi Stabilitas Statis Kapal Payang Madura (Kasus pada Salah Satu Kapal Payang di Pamekasan) adalah karya saya sendiri dengan arahan dosen pembimbing dan belum pernah diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya ilmiah yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam daftar pustaka di bagian akhir skripsi ini.
Bogor, Desember 2010
Rizki Mulya Sari
ABSTRAK
RIZKI MULYA SARI, C44063401. Stabilitas Statis Kapal Payang Madura (Kasus pada Salah Satu Kapal Payang di Pamekasan). Dibimbing oleh BUDHI HASCARYO ISKANDAR dan FIS PURWANGKA.
Stabilitas kapal dapat diartikan sebagai kemampuan kapal untuk kembali ke posisi semula setelah miring akibat gaya yang bekerja dari luar kapal. Stabilitas kapal yang baik sangat dibutuhkan untuk memberikan keselamatan dan kenyamanan awak kapal terutama pada saat kegiatan penangkapan. Salah satu kapal penangkap ikan yang memerlukan stabilitas yang baik adalah kapal payang karena alat tangkap ini dioperasikan pada salah satu sisi kapal saja. Kapal payang banyak dioperasikan oleh nelayan di Pamekasan Madura. Tujuan dari penelitian ini adalah untuk membandingkan rasio dimensi salah satu kapal payang Pamekasan dengan paramater desain kapal payang dan kapal-kapal ikan lainnya di beberapa daerah di Indonesia dan menentukan nilai parameter stabilitas statis salah satu kapal payang Pamekasan dengan variasi titik berat kapal (KG) dan draft kapal.
Metode yang digunakan berupa metode deskriptif, studi kasus, dan numerik. Data desain dan konstruksi didapatkan dari penelitian yang telah dilakukan sebelumnya oleh Arofik (2007) mengenai desain dan konstruksi kapal payang Pamekasan di Madura. Kasus yang diteliti adalah stabilitas kapal payang Pamekasan di Madura dengan simulasi distribusi muatan yang berbeda. Kapal payang Pamekasan yang diteliti tergolong kapal yang berukuran kecil dibandingkan dengan kapal payang di beberapa daerah lainnya di Indonesia. Hasil penelitian menunjukkan bahwa kapal payang Pamekasan yang diteliti ini tergolong cukup baik dinilai dari stabilitasnya. Kapal payang Pamekasan yang diteliti memiliki selang stabilitas yang semakin besar di setiap berkurangnya nilai KG dan nilai draft. Besarnya selang stabilitas berbanding lurus dengan besarnya nilai vanishing angle serta sudut dan nilai maksimum GZ. Semakin besar selang stabilitas maka nilai vanishing angle serta sudut dan nilai maksimum GZ-nya akan semakin besar pula, begitu juga sebaliknya. Kondisi stabilitas statis yang paling baik adalah yang memiliki selang stabilitas paling besar yaitu pada saat tinggi draft 0,54 m dan tinggi KG 0,54 m dengan selang stabilitas 0º - 85,9º dan nilai vanishing angle sebesar 85,9º. Sedangkan untuk kondisi stabilitas yang kurang baik adalah yang memiliki selang stabilitas paling kecil yaitu pada saat tinggi draft 0,54 m dan tinggi KG 0,87 m dengan selang stabilitas 0º - 36,4º dan nilai vanishing angle sebesar 36,4º.
Kata kunci : kapal payang, Madura, Pamekasan, stabilitas statis
© Hak cipta milik IPB, tahun 2010 Hak cipta dilindungi Undang - Undang
1) Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumber:
a. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah.
b. Pengutipan tidak merugikan kepentingan yang wajar IPB.
2) Dilarang mengumumkan dan memperbanyak sebagian atau seluruh karya tulis
ini dalam bentuk apapun tanpa izin tertulis dari IPB.
STABILITAS STATIS KAPAL PAYANG MADURA (Kasus pada Salah Satu Kapal Payang di Pamekasan)
RIZKI MULYA SARI C44063401
Skripsi
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Perikanan pada
Departemen Pemanfaatan Sumberdaya Perikanan
MAYOR TEKNOLOGI DAN MANAJEMEN PERIKANAN TANGKAP DEPARTEMEN PEMANFAATAN SUMBERDAYA PERIKANAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN INSTITUT PERTANIAN BOGOR
BOGOR
2010
Judul Skripsi : Stabilitas Statis Kapal Payang Madura (Kasus pada Salah Satu Kapal Payang di Pamekasan)
Nama : Rizki Mulya Sari
NRP : C44063401
Mayor : Teknologi dan Manajemen Perikanan Tangkap
Disetujui : Komisi Pembimbing,
Pembimbing I, Pembimbing II,
Dr. Ir. Budhi Hascaryo Iskandar, M.Si Fis Purwangka, S.Pi, M.Si NIP : 19670215 199103 1 004 NIP : 19720502 200701 1 002
Diketahui,
Ketua Departemen Pemanfaatan Sumberdaya Perikanan,
Dr. Ir. Budy Wiryawan, M.Sc NIP : 19621223 198703 1 001
Tanggal lulus : 23 Desember 2010
KATA PENGANTAR
Penulisan skripsi ditujukan untuk memenuhi syarat mendapatkan gelar sarjana pada Departemen Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Tema yang dipilih dalam penelitian yang dilaksanakan pada bulan Maret sampai dengan Mei 2010 ini adalah Stabilitas Kapal Ikan, dengan judul Stabilitas Statis Kapal Payang Madura (Kasus pada Salah Satu Kapal Payang di Pamekasan).
Penulis menyadari bahwa dalam penulisan skripsi ini masih banyak kekurangan dan kelemahan, oleh karena itu penulis mengharapkan adanya kritik dan saran yang membangun untuk penyempurnaan skripsi ini. Semoga skripsi ini dapat memberikan manfaat bagi semua pihak yang memerlukannya.
Bogor, Desember 2010
Rizki Mulya Sari
UCAPAN TERIMA KASIH
Ucapan terima kasih penulis sampaikan kepada :
1. Bapak Dr. Ir. Budhi Hascaryo Iskandar, M.Si dan Bapak Fis Purwangka, S.Pi, M.Si sebagai komisi pembimbing yang banyak membantu dan mengarahkan penulis dalam pembuatan skripsi ini;
2. Bapak Dr. Ir. Mohammad Imron, M.Si sebagai Ketua Komisi Pendidikan departemen Pemanfaatan Sumberdaya Perikanan yang banyak memberikan saran dalam perbaikan skripsi;
3. Ibu Yopi Novita, S.Pi, M.Si sebagai dosen penguji yang banyak memberikan kritikan, masukan, dan saran kepada penulis dalam pembuatan skripsi ini;
4. Ibu Vita Rumanti, S.Pi, M.T dan Kak Adi Susanto, S.Pi, M.Si atas semua bantuan yang telah diberikan;
5. Ibunda (Bulkis Jakfar), Ayahanda (Musdirman), dan adik-adik tersayang (M.
Taufan dan M. Fauzan) atas semua dukungan dan doanya;
6. Sahabat-sahabat tersayang Ike, Qbee, Ratih, Udin, Ocid, Daey, Sesar, Iqbal, Kuskus, Rachman, Bayu, Ghea, Dedy, Mia, Yasa, Ciwid, Alvi, Adit, Lala, Ona, Iniz, Nene, Uty, Iki, Ina, Mertha, Ari, Seli, Riri, Arif, Rima, Maria, Troy, Gini, Ncek, dan Alfian yang telah banyak memberi bantuan dan kebersamaan;
7. Teman-teman PSP 43 GaDaLoGaRame, PSP 44, PSP 45, dan seluruh civitas PSP lainnya;
8. Semua pihak terkait yang tidak dapat disebutkan satu persatu.
RIWAYAT HIDUP
Penulis dilahirkan di Meulaboh pada tanggal 12 Oktober 1988 dari pasangan Bapak Musdirman dan Ibu Bulkis Jakfar. Penulis merupakan anak pertama dari tiga bersaudara.
Penulis lulus dari SD Karya Bhakti Medan pada tahun 2000, kemudian melanjutkan ke SLTP Negeri 7 Medan dan lulus pada tahun 2003, kemudian melanjutkan ke SMA Kartika I-2 Medan dan lulus pada tahun 2006 dan pada tahun yang sama lulus seleksi masuk IPB melalui jalur Undangan Seleksi Masuk IPB (USMI). Penulis memilih Mayor Teknologi dan Manajemen Perikanan Tangkap, Departemen Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
Selama mengikuti perkuliahan, penulis menjadi asisten mata kuliah
Rekayasa Tingkah Laku Ikan pada tahun ajaran 2008/2009 dan mata kuliah
Navigasi Kapal Perikanan pada tahun ajaran 2009/2010. Selain itu penulis juga
aktif di organisasi HIMAFARIN sebagai staf Departemen Kesekretariatan pada
periode 2007-2008, sebagai kepala Departemen Kesekretariatan pada periode
2008-2009. Dalam rangka menyelesaikan tugas akhir, penulis melakukan
penelitian dan menyusun skripsi dengan judul “Stabilitas Statis Kapal Payang
Madura (Kasus pada Salah Satu Kapal Payang di Pamekasan)”.
DAFTAR ISI
Halaman
DAFTAR TABEL ... x
DAFTAR GAMBAR ... xi
DAFTAR LAMPIRAN ... xii
DAFTAR ISTILAH ... xiii
1 PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan Penelitian... 3
1.3 Manfaat Penelitian... 3
2 TINJAUAN PUSTAKA 2.1 Kapal Perikanan ... 4
2.1.1 Dimensi utama kapal ... 5
2.1.2 Parameter hidrostatik kapal ... 6
2.2 Alat Tangkap Payang ... 6
2.3 Kapal Payang Pamekasan Madura ... 7
2.4 Rasio Dimensi Kapal ... 11
2.5 Stabilitas Kapal ... 14
2.6 Kurva GZ... 18
3 METODE PENELITIAN 3.1 Waktu dan Tempat ... 20
3.2 Peralatan ... 20
3.3 Metode Pengumpulan Data ... 20
3.4 Pengolahan Data ... 21
3.5 Analisis Data ... 22
4 HASIL DAN PEMBAHASAN 4.1 Rasio Dimensi Kapal Payang Pamekasan ... 24
4.2 Stabilitas Statis Kapal Payang Pamekasan ... 26
5 KESIMPULAN DAN SARAN 5.1 Kesimpulan... 34
5.2 Saran ... 34
DAFTAR PUSTAKA ... 35
LAMPIRAN ... 37
DAFTAR TABEL
Halaman 1 Tabel hidrostatik kapal payang Pamekasan yang diteliti ... 8 2 Nilai kisaran rasio dimensi berdasarkan metode operasi di beberapa
daerah di Indonesia ... 11 3 Nilai kisaran koefisien bentuk (coefficient of fineness) berdasarkan
metode operasi di beberapa daerah di Indonesia ... 14 4 Nilai kisaran rasio dimensi kapal payang di beberapa daerah lainnya
di Indonesia ... 14 5 Kisaran rasio dimensi untuk kapal jenis encircling gear di Indonesia
serta hasil perhitungan rasio dimensi untuk kapal payang Pamekasan
yang diteliti ... 24 6 Nilai kisaran rasio dimensi kapal payang Pamekasan yang diteliti
serta nilai kisaran rasio dimensi kapal payang di beberapa daerah
lainnya di Indonesia ... 25 7 Nilai BM, BG, KB, GM, dan Selang stabilitas pada berbagai kondisi
draft dan KG ... 31
x
DAFTAR GAMBAR
Halaman
1 Kurva hidrostatik kapal payang Pamekasan yang diteliti ... 9
2 Lines Plan kapal payang Pamekasan yang diteliti ... 10
3 Ilustrasi Block Coefficient ... 12
4 Ilustrasi Prismatic coefficient dan Vertical prismatic coefficient ... 13
5 Ilustrasi Midship coefficient ... 13
6 Ilustrasi Waterplane coefficient ... 13
7 Posisi Keseimbangan ... 15
8 Keseimbangan Stabil (Stable Equilibrium) ... 16
9 Keseimbangan Netral (Neutral Equilibrium) ... 17
10 Keseimbangan Tidak Stabil (Unstable Equilibrium) ... 17
11 Kurva GZ ... 19
12 Prinsip perhitungan nilai GZ ... 21
13 Bodyplan dan posisi titik P ... 23
14 Kurva stabilitas statis kapal payang Pamekasan pada tiap sudut keolengan dan pada kondisi draft desain sebesar 0,54 m dan KG desain sebesar 0,77 m ... 27
15 Perbandingan kurva stabilitas statis kapal payang Pamekasan pada kondisi draft desain sebesar 0,54 m dan KG desain sebesar 0,77 m dengan kurva stabilitas kapal payang Pamekasan dengan beberapa variasi nilai KG ... 28
16 Perbandingan kurva stabilitas statis kapal payang Pamekasan pada kondisi draft desain sebesar 0,54 m dan KG desain sebesar 0,77 m dengan kurva stabilitas kapal payang Pamekasan dengan beberapa variasi nilai draft ... 30
17 Kurva stabilitas statis kapal payang Pamekasan pada kondisi draft desain sebesar 0,54 m dan beberapa variasi nilai KG beserta floading angle-nya ... 33
18 Kurva stabilitas statis kapal payang Pamekasan pada kondisi KG desain sebesar 0,77 m dan beberapa variasi nilai draft beserta floading angle-nya ... 33
xi
DAFTAR LAMPIRAN
Halaman 1 Hasil perhitungan kurva stabilitas statis dengan software PGZ pada
kondisi draft desain 0,54 m dan KG desain 0,77 m ... 38 2 Perhitungan luasan area di bawah kurva pada kondisi draft desain
0,54 m dan KG desain 0,77 m hingga sudut stabilitas maksimum
sebesar 20º ... 39 3 Hasil perhitungan kurva stabilitas statis dengan software PGZ pada
kondisi draft desain 0,54 m dan KG 0,87 m ... 40 4 Perhitungan luasan area di bawah kurva pada kondisi draft desain
0,54 m dan KG 0,87 m hingga sudut stabilitas maksimum sebesar
17,5º ... 41 5 Hasil perhitungan kurva stabilitas statis dengan software PGZ pada
kondisi draft desain 0,54 m dan KG 0,67 m ... 42 6 Perhitungan luasan area di bawah kurva pada kondisi draft desain
0,54 m dan KG 0,67 m hingga sudut stabilitas maksimum sebesar
25º ... 43 7 Hasil perhitungan kurva stabilitas statis dengan software PGZ pada
kondisi draft desain 0,54 m dan KG 0,54 m ... 44 8 Perhitungan luasan area di bawah kurva pada kondisi draft desain
0,54 m dan KG 0,54 m hingga sudut stabilitas maksimum sebesar
30º ... 45 9 Hasil perhitungan kurva stabilitas statis dengan software PGZ pada
kondisi draft 0,44 m dan KG desain 0,77 m ... 46 10 Perhitungan luasan area di bawah kurva pada kondisi draft 0,44 m
dan KG desain 0,77 m hingga sudut stabilitas maksimum sebesar
25º ... 47 11 Hasil perhitungan kurva stabilitas statis dengan software PGZ pada
kondisi draft 0,34 m dan KG desain 0,77 m ... 48 12 Perhitungan luasan area di bawah kurva pada kondisi draft 0,34 m
dan KG desain 0,77 m hingga sudut stabilitas maksimum sebesar
30º ... 49
xii
DAFTAR ISTILAH
Breadth Lebar kapal
Body plan Gambar irisan melintang (transversal) kapal pada tiap ordinat
Depth Dalam atau tinggi kapal yang diukur dari dek terendah hingga bagian badan kapal ke bawah
Draft Tinggi badan kapal pada sarat air tertinggi
Encircling gear Kapal yang mengoperasikan alat tangkap dengan melingkari gerombolan ikan
Gross Tonage Kapasitas kapal yang dihubungkan dengan daya muat kapal
KG Pusat gaya berat secara vertikal dari arah lunas kapal LOA Panjang total kapal yang diukur dari ujung haluan hingga
ujung buritan
LPP Panjang kapal yang diukur antara garis tegak lurus pada perpotongan sarat air di bagian haluan dan buritan
LWL Panjang kapal pada garis air yang diukur antara titik perpotongan sarat air pada badan kapal bagian buritan dan badan kapal bagian haluan
Lines plan Gambar rencana garis kapal pada setiap garis air dan ordinat yang tertuang dalam 3 buah gambar yaitu body plan, profile plan, dan half breadth plan
Profile plan Gambar irisan memanjang longitudinal kapal
Righting moment Kapal bergerak berlawanan arah dengan kemiringan kapal Ton displacement Berat badan kapal yang terendam air
Vanishing angle Hilangnya kemampuan kapal untuk kembali ke posisi tegak akibat hilangnya momen yang mengembalikan kapal Volume displacement Volume badan kapal yang terendam air
xiii
1 PENDAHULUAN
1.1 Latar Belakang
Kapal merupakan suatu bentuk konstruksi yang dapat terapung (floating) di air dan mempunyai sifat muat berupa penumpang atau barang yang sifat geraknya bisa dengan dayung, angin, atau mesin (Soekarsono, 1995). Kapal ikan atau yang sering disebut dengan kapal perikanan merupakan kapal yang dibangun untuk melakukan pekerjaan-pekerjaan usaha penangkapan ikan dengan ukuran, rancangan bentuk dek, kapasitas muat, akomodasi, mesin serta berbagai perlengkapan yang secara keseluruhan disesuaikan dengan fungsi dalam rencana operasi. Menurut Peraturan Menteri Kelautan dan Perikanan No. 16 Tahun 2006, kapal perikanan adalah kapal atau perahu atau alat apung lain yang dipergunakan untuk melakukan penangkapan ikan, mendukung operasi penangkapan ikan, pembudidayaan ikan, pengangkutan ikan, pengolahan ikan, pelatihan perikanan dan penelitian/eksplorasi perikanan.
Pembangunan kapal perikanan sangat beragam, dimulai dari yang bersifat tradisional sampai dengan modern yang memanfaatkan teknologi maju sejalan dengan berkembangnya teknologi itu sendiri. Sebagian besar kapal perikanan yang beroperasi di Indonesia dibangun oleh galangan kapal tradisional yang pembangunannya tidak dilengkapi dengan perencanaan dan syarat-syarat yang umum diperlukan. Hal ini terjadi karena proses pembangunan berdasarkan pada pengetahuan yang diperoleh secara turun temurun (Iskandar dan Pujiati, 1995).
Kapal perikanan merupakan salah satu sarana terpenting dalam usaha penangkapan ikan. Keadaan kapal sangat mempengaruhi berhasil atau tidaknya suatu operasi penangkapan ikan. Oleh karena itu, maka kapal harus mempunyai beberapa persyaratan yang berkaitan dengan desain, konstruksi, stabilitas, dan juga kesesuaian dengan alat tangkap yang akan dioperasikan.
Dalam memenuhi persyaratan untuk menunjang keberhasilan penangkapan ikan maka salah satu faktor yang penting diperhatikan adalah stabilitas yang baik.
Stabilitas kapal dapat diartikan sebagai kemampuan kapal untuk kembali ke posisi
semula setelah miring akibat gaya yang bekerja dari luar kapal. Stabilitas kapal
yang baik sangat dibutuhkan untuk memberikan keselamatan dan kenyamanan awak kapal terutama pada saat kegiatan penangkapan. Salah satu cara mengetahui stabilitas kapal ikan adalah dengan menentukan kualitas stabilitas statis kapal ikan tersebut. Stabilitas statis adalah pengukuran stabilitas kapal pada beberapa sudut keolengan dengan nilai ton displacement yang berbeda (Farhum, 2006). Perlunya mengetahui kualitas stabilitas statis kapal ikan adalah agar dapat diketahui kualitas stabilitas kapal ikan pada beberapa sudut keolengan, dimana kapal memiliki berat muatan yang berbeda, serta tanpa diberi suatu usaha seperti angin, gelombang, dan gaya eksternal lainnya yang menyebabkan kapal tersebut miring.
Salah satu kapal penangkap ikan yang memerlukan stabilitas yang baik adalah kapal payang. Kapal payang merupakan kapal yang mengoperasikan alat tangkap payang. Alat tangkap payang termasuk dalam kelompok encircling gear yaitu alat tangkap yang pengoperasiannya dengan cara mengurung atau mengepung gerombolan ikan. Kapal payang didesain memiliki lambung yang cukup besar, dek yang tidak terlalu tinggi, dan working area yang cukup luas.
Beberapa faktor tersebut perlu diperhatikan karena untuk menampung hasil tangkapan dalam jumlah yang besar dan mempermudah saat penarikan jaring dan pemindahan hasil tangkapan dari laut ke atas kapal. Selain itu, karena alat tangkap ini dioperasikan pada salah satu sisi kapal saja maka working area juga perlu diperhatikan agar mempermudah kerja ABK dalam melakukan aktivitas baik saat setting maupun hauling. Oleh karena itu kapal payang memerlukan stabilitas yang baik.
Penelitian tentang stabilitas statis ini juga ditujukan untuk memperkirakan kondisi kapal dengan berbagai kondisi muatan. Kondisi muatan yang dimaksud seperti posisi muatan maupun jumlah muatan di atas kapal. Dengan begitu kita dapat memperkirakan berapa beban maksimum dan penempatan muatan yang optimal pada saat kapal dan alat tangkap beroperasi.
Penelitian tentang stabilitas statis salah satu kapal payang Pamekasan ini
merupakan penelitian lanjutan dari penelitian sebelumnya oleh Arofik (2007)
mengenai desain dan konstruksi kapal payang di Pamekasan Madura (kasus pada
salah satu kapal payang). Penelitian ini sangat penting dilakukan karena
informasi tentang kualitas stabilitas kapal sangat dibutuhkan oleh pengguna kapal,
2
terutama bagi kapten kapal yang bertanggung jawab terhadap keselamatan dan kenyamanan awak kapal. Selain itu penelitian ini dilakukan untuk melengkapi data teknis pada kapal payang tersebut.
1.2 Tujuan Penelitian
Tujuan dari penelitian ini adalah untuk menentukan nilai parameter stabilitas statis salah satu kapal payang Pamekasan dengan variasi titik berat kapal (KG) dan draft kapal untuk memperkirakan kondisi kapal dengan berbagai kondisi muatan.
1.3 Manfaat Penelitian
Manfaat dari penelitian ini adalah untuk memberikan informasi mengenai kondisi stabilitas statis salah satu kapal payang Pamekasan dengan variasi titik berat kapal (KG) dan draft kapal agar dapat memperkirakan berapa beban maksimum dan penempatan muatan yang optimal pada saat kapal dan alat tangkap beroperasi.
3
2 TINJAUAN PUSTAKA
2.1 Kapal Perikanan
Kapal diartikan sebagai suatu bentuk konstruksi yang dapat terapung (floating) di air dan mempunyai sifat muat berupa penumpang atau barang yang sifat geraknya bisa dengan dayung, angin, atau mesin (Soekarsono, 1995). Kapal perikanan menurut Nomura and Yamazaki (1977) adalah kapal yang digunakan dalam usaha perikanan yang mencakup penggunaan atau aktivitas dalam usaha menangkap atau mengumpulkan sumberdaya perairan (aquatic resource), mengelola usaha budidaya sumberdaya perairan dan juga penggunaan dalam aktivitas, misalnya training, research dan untuk inspeksi sumberdaya perikanan.
Menurut Peraturan Menteri Kelautan dan Perikanan No. 16 Tahun 2006, kapal perikanan adalah kapal atau perahu atau alat apung lain yang dipergunakan untuk melakukan penangkapan ikan, mendukung operasi penangkapan ikan, pembudidayaan ikan, pengangkutan ikan, pengolahan ikan, pelatihan perikanan dan penelitian / eksplorasi perikanan. Menurut Fyson (1985) menjelaskan bahwa kapal perikanan merupakan kapal yang dibangun untuk melakukan pekerjaan- pekerjaan penangkapan ikan (fishing operation), menyimpan ikan dan lain sebagainya yang didesain dengan ukuran, rancangan betuk dek, kapasitas muatan, akomodasi, mesin dan berbagai perlengkapan yang secara keseluruhan disesuaikan dengan fungsi dalam rencana operasi penangkapan ikan.
Nomura and Yamazaki (1977) mengemukakan beberapa persyaratan minimal untuk kapal perikanan yang dapat digunakan untuk operasi penangkapan ikan, yaitu:
(1) Memiliki kekuatan struktur badan kapal (2) Menunjang keberhasilan operasi penangkapan (3) Memiliki stabilitas yang tinggi
(4) Memiliki fasilitas penyimpanan hasil tangkapan
Menurut Fyson (1985), klasifikasi kapal berdasarkan bentuk gerakan umum
yang dilakukan oleh kapal terkait dengan pengoperasian alat tangkap dibagi
menjadi beberapa kelompok besar, yaitu encircling gear (pengoperasian dengan
cara dilingkarkan, contoh : purse seine, payang, dogol, dan sejenisnya), towed/
dragged gear (pengoperasian dengan cara ditarik, contoh : cantrang, pukat ikan, trawl, lampara, tonda, dan sejenisnya), dan static gear (pengoperasian pasif, contoh : gillnet, jaring rampus, jaring klitik dan sejenisnya). Iskandar dan Pujiati (1995) menambahkan satu kelompok dari pembagian di atas, yaitu multipurpose (pengoperasian lebih dari satu alat tangkap, contoh : kombinasi drift gillnet dengan longline dan kombinasi lainnya).
2.1.1 Dimensi Utama Kapal
Dalam desain sebuah kapal, Fyson (1985) menjelaskan bahwa dimensi utama kapal ditentukan dalam tiga arah utama. Ketiga arah tersebut adalah longitudinal, horizontal, dan vertikal. Ketiga arah ini sesuai dengan tiga ordinat dimana bentuk dari sebuah kapal bisa digambarkan. Dimensi utama tersebut adalah panjang (arah OX), lebar (arah OY), dan dalam serta draft (arah OZ).
Dimensi panjang kapal yang diukur dari dua titik yang berbeda pada bagian haluan dan buritan didefinisikan menjadi tiga. Dimensi yang pertama adalah length over all (L
OA) yaitu panjang maksimum diukur dari bagian terluar haluan hingga bagian terluar buritan. Definisi ini biasanya tidak digunakan dalam desain kerja. Dimensi panjang yang kedua adalah length perpendicular (L
PP) yaitu panjang kapal antara after perpendicular (AP) dan fore perpendicular (FP).
Dimensi panjang yang ketiga adalah length of water line (L
WL) yaitu panjang kapal pada garis air yang diukur pada titik perpotongan garis load water line pada bagian haluan sampai bagian buritan.
Pada arah melebar (horizontal), dimensi utama kapal adalah breadth atau beam (B) yang didefinisikan sebagai lebar kapal terlebar yang diukur dari satu sisi luar ke sisi lainnya. Pada arah ke atas (vertikal), terdapat dua dimensi utama kapal. Dimensi yang pertama adalah depth (D) yang merupakan tinggi kapal yang diukur mulai dari dek kapal terendah hingga ke bagian badan kapal paling bawah.
Dimensi kedua adalah draught atau depth (d) yang merupakan jarak vertikal dari titik terendah kapal sampai L
WL.
5
2.1.2 Parameter Hidrostatik Kapal
Selain dimensi utama, kapal juga memiliki parameter hidrostatik. Parameter hidrostatik tersebut menunjukkan kondisi awal kapal. Fyson (1985) menjelaskan bahwa beberapa parameter hidrostatik yang perlu diketahui adalah sebagai berikut:
(1) Berat kapal (displacement);
(2) Area garis air (waterline areas);
(3) Posisi titik pusat gaya apung (position of centres of buoyancy of waterplanes);
(4) Posisi titik pusat gaya gravitasi;
(5) Momen inersia secara transversal dan longitudinal;
(6) Posisi titik metacenter secara transversal dan longitudinal;
(7) Momen untuk merubah trim; dan
(8) Ton per centimetre immersion (TPC) yang dihitung pada berbagai draft.
Berbagai parameter di atas terkadang juga mencakup nilai dari berbagai koefisien bentuk dari kapal.
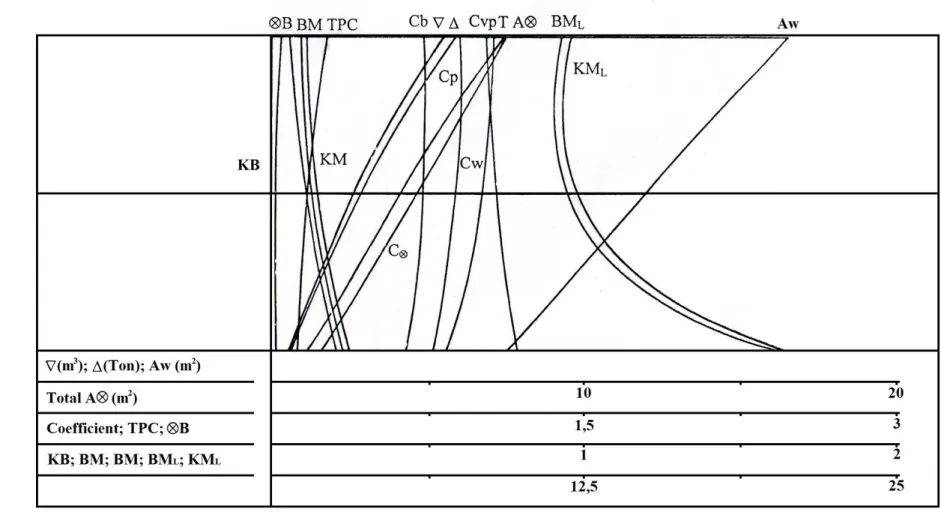
Parameter hidrostatik biasanya ditampilkan sebagai fungsi dari draft kapal dalam bentuk kurva yang disebut kurva hidrostatik. Kurva ini menggambarkan beberapa parameter yang dibutuhkan untuk perhitungan yang terkait dengan kondisi muatan dan stabilitas sebuah kapal.
2.2 Alat Tangkap Payang
Menurut klasifikasi Von Brandt (1984), alat tangkap payang termasuk ke dalam kelompok besar seine net atau danish net yaitu alat tangkap yang mempunyai badan dan warp penarik yang sangat panjang dengan atau tanpa kantong. Alat tangkap payang termasuk ke dalam kelompok encircling gear yaitu alat tangkap yang pengoperasiannya dengan cara mengurung atau mengepung gerombolan ikan.
Konstruksi alat tangkap payang terdiri dari bagian kantong, badan jaring, sayap, tali selambar, pemberat di tali ris bawah dan pelampung di tali ris atas.
Pada satu unit operasi penangkapan, jumlah nelayan payang sekitar 17-20 orang
yang didalamnya sudah terdapat tekong (fishing master), juru mudi, ABK yang
6
bertugas saat operasi penangkapan, anak payang yang bertugas menggiring kumpulan ikan masuk ke dalam kantong, dan 1 orang yang bertugas turun ke laut menggunakan pelampung ban untuk memperbaiki dan merapihkan bukaan dari jaring payang.
Pengoperasian alat tangkap payang dibagi menjadi tiga tahap, yaitu persiapan, penurunan jaring (setting), dan penarikan jaring (hauling). Persiapan operasi meliputi penentuan daerah penangkapan ikan (fishing ground), persiapan alat tangkap, bahan bakar, dan perbekalan. Setelah sampai di fishing ground dan melihat gerombolan ikan, maka jaring diturunkan dengan melingkari area seluas- luasnya, ikan digiring masuk ke dalam kantong, kemudian alat tangkap ditarik ke atas kapal. Pengoperasian alat tangkap payang pada salah satu sisi kapal saja, oleh karena itu kapal ini harus memiliki stabilitas yang baik.
2.3 Kapal Payang Pamekasan di Madura
Spesifikasi kapal payang Pamekasan (diteliti pada salah satu kapal) adalah sebagai berikut (Arofik, 2007):
L
OA= 10,70 m
L
PP= 8,48 m
B = 2,77 m
D = 0,77 m
d = 0,54 m
Kapasitas kapal = 2,00 GT Tenaga penggerak = 19,00 PK
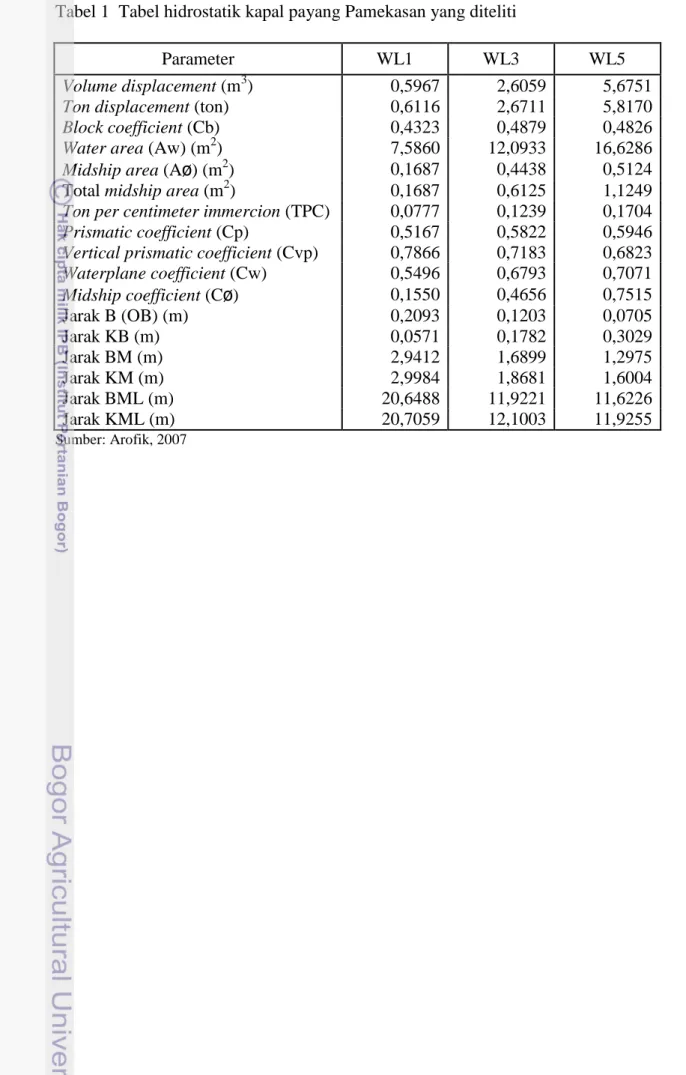
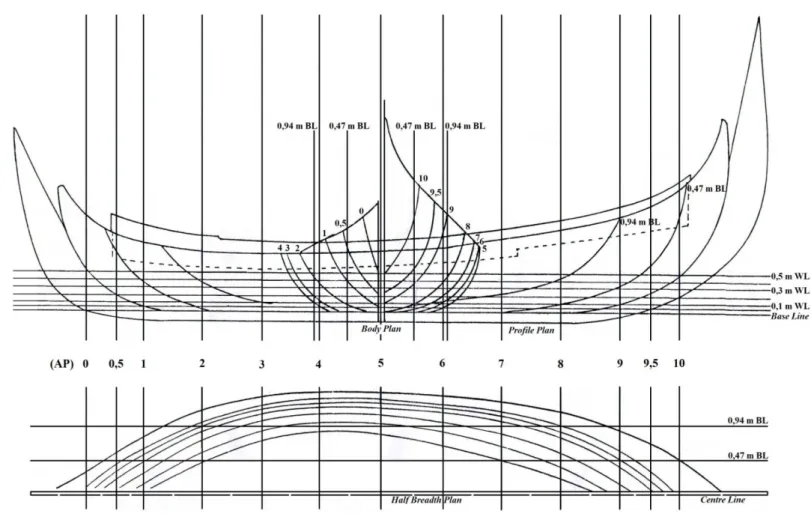
Parameter hidrostatik dan kurva hidrostatik kapal payang Pamekasan yang diteliti dapat dilihat pada Tabel 1 dan Gambar 1 dan untuk gambar lines plan kapal payang Pamekasan yang diteliti dapat dilihat pada Gambar 2.
7
Tabel 1 Tabel hidrostatik kapal payang Pamekasan yang diteliti
Parameter WL1 WL3 WL5
Volume displacement (m
3) 0,5967 2,6059 5,6751
Ton displacement (ton) 0,6116 2,6711 5,8170
Block coefficient (Cb) 0,4323 0,4879 0,4826
Water area (Aw) (m
2) 7,5860 12,0933 16,6286
Midship area (Aø) (m
2) 0,1687 0,4438 0,5124
Total midship area (m
2) 0,1687 0,6125 1,1249
Ton per centimeter immercion (TPC) 0,0777 0,1239 0,1704
Prismatic coefficient (Cp) 0,5167 0,5822 0,5946
Vertical prismatic coefficient (Cvp) 0,7866 0,7183 0,6823
Waterplane coefficient (Cw) 0,5496 0,6793 0,7071
Midship coefficient (Cø) 0,1550 0,4656 0,7515
Jarak B (OB) (m) 0,2093 0,1203 0,0705
Jarak KB (m) 0,0571 0,1782 0,3029
Jarak BM (m) 2,9412 1,6899 1,2975
Jarak KM (m) 2,9984 1,8681 1,6004
Jarak BML (m) 20,6488 11,9221 11,6226
Jarak KML (m) 20,7059 12,1003 11,9255
Sumber: Arofik, 2007
8
Gambar 1 Kurva hidrostatik kapal payang Pamekasan yang diteliti.
Sumber: Arofik, 2007
9
Gambar 2 Lines Plan kapal payang Pamekasan yang diteliti.
Sumber: Arofik, 2007
10
2.4 Rasio Dimensi Kapal
Kapal perikanan memiliki tiga dimensi utama atau biasa disebut ukuran utama, yaitu panjang kapal (Length/L), lebar kapal (Breadth/B), dan dalam kapal (Depth/D). Dimensi utama kapal diperlukan untuk menentukan rasio dimensi, volume, kapasitas kapal, stabilitas kapal, serta perhitungan lainnya. Menurut Ayodhyoa (1972) dalam Iskandar dan Pujiati (1995), nilai L erat hubungannya dengan interior arrangement, nilai B erat hubungannya dengan stabilitas dan kemampuan gerak, dan nilai D erat hubungannya dengan penyimpanan dan stabilitas. Lebih lanjut menurut Fyson (1985) bahwa rasio antara panjang dan lebar (L/B) berpengaruh terhadap resistensi kapal, rasio antara panjang dan dalam (L/D) berpengaruh terhadap kekuatan memanjang kapal, dan rasio antara lebar dan dalam (B/D) berpengaruh terhadap stabilitas kapal ikan.
Nilai rasio dimensi sangat penting untuk menentukan kemampuan (ability) dari suatu kapal ikan (Iskandar dan Pujiati, 1995). Menurut Ayodhyoa (1972), jika nilai L/B mengecil akan berpengaruh buruk terhadap kecepatan kapal karena nilai tahanan geraknya akan semakin besar, nilai L/D yang semakin besar akan mengakibatkan melemahnya kekuatan memanjang kapal (longitudinal strength) sehingga kapal kurang tahan terhadap gerakan lengkung yang mengarah ke atas maupun ke bawah, sedangkan nilai B/D yang semakin besar akan mengakibatkan stabilitas kapal yang baik akan tetapi kemampuan gerak (propulsive ability) memburuk. Nilai kisaran rasio dimensi berdasarkan metode operasi di beberapa daerah di Indonesia dapat dilihat pada Tabel 2.
Tabel 2 Nilai kisaran rasio dimensi berdasarkan metode operasi di beberapa daerah di Indonesia
Metode Operasi Rasio Dimensi
L/B L/D B/D
Encircling Gear 2,60 - 9,30 4,55 - 17,43 0,56 - 5,00 Towed/Dragged Gear 2,86 - 8,30 7,20 - 15,12 1,25 - 4,41 Static Gear 2,83 - 11,12 4,58 - 17,28 0,96 - 4,68 Multipurpose 2,88 - 9,42 8,69 - 17,55 0,35 - 6,09
Sumber: Iskandar dan Pujiati, 1995
11
Rasio dimensi memberikan gambaran tentang dimensi luar sebuah kapal, akan tetapi tidak menggambarkan bentuk dari badan kapal. Untuk itu perlu diketahui nilai dari koefisien bentuk (coefficient of fineness) yang akan menunjukkan bentuk tubuh kapal berdasarkan hubungan antara luas area tubuh kapal yang berbeda dan volume tubuh kapal terhadap masing-masing dimensi utama kapal (Fyson, 1985). Selain itu koefisien bentuk juga berguna untuk mengetahui kegemukan atau kerampingan dari badan kapal yang merupakan kriteria yang berguna untuk membandingkan satu kapal dengan kapal yang lain (Smith, 1975). Koefisien bentuk terdiri dari:
(1) Block coefficient (Cb), koefisien ini menunjukkan perbandingan kapasitas displacement kapal dengan volume bidang empat persegi panjang yang mengelilingi tubuh kapal;
Gambar 3 Ilustrasi Block Coefficient.
(2) Prismatic coefficient (Cp), merupakan perbandingan antara kapasitas displacement kapal dengan volume yang dibentuk oleh luas area penampang melintang tengah kapal dengan panjang kapal pada waterplane;
(3) Vertical prismatic coefficient (Cvp), merupakan perbandingan antara kapasitas displacement kapal dengan volume yang dibentuk oleh luas area waterplane dengan draft kapal secara vertikal;
12
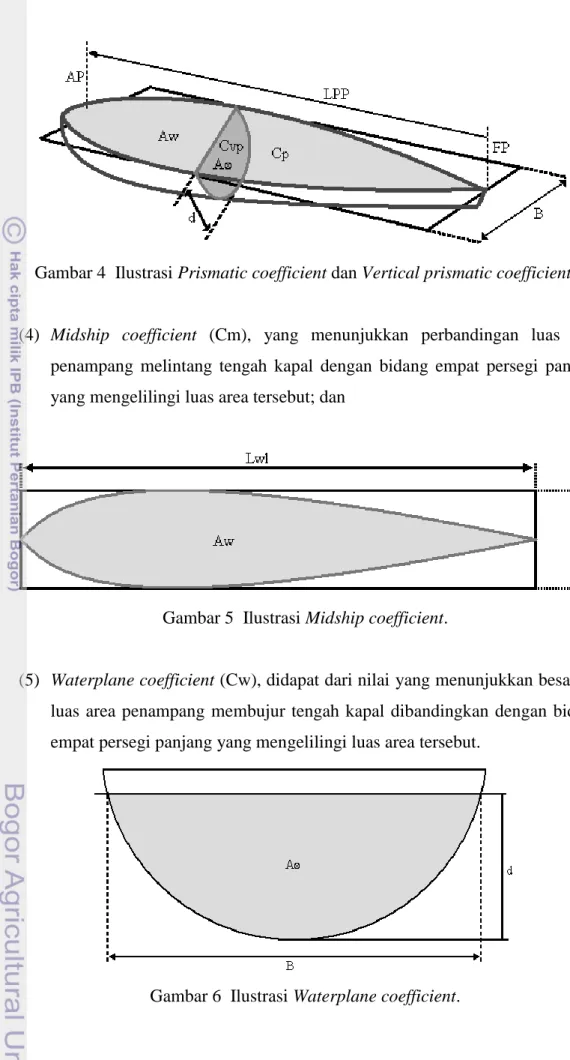
Gambar 4 Ilustrasi Prismatic coefficient dan Vertical prismatic coefficient.
(4) Midship coefficient (Cm), yang menunjukkan perbandingan luas area penampang melintang tengah kapal dengan bidang empat persegi panjang yang mengelilingi luas area tersebut; dan
Gambar 5 Ilustrasi Midship coefficient.
(5) Waterplane coefficient (Cw), didapat dari nilai yang menunjukkan besarnya luas area penampang membujur tengah kapal dibandingkan dengan bidang empat persegi panjang yang mengelilingi luas area tersebut.
Gambar 6 Ilustrasi Waterplane coefficient.
13
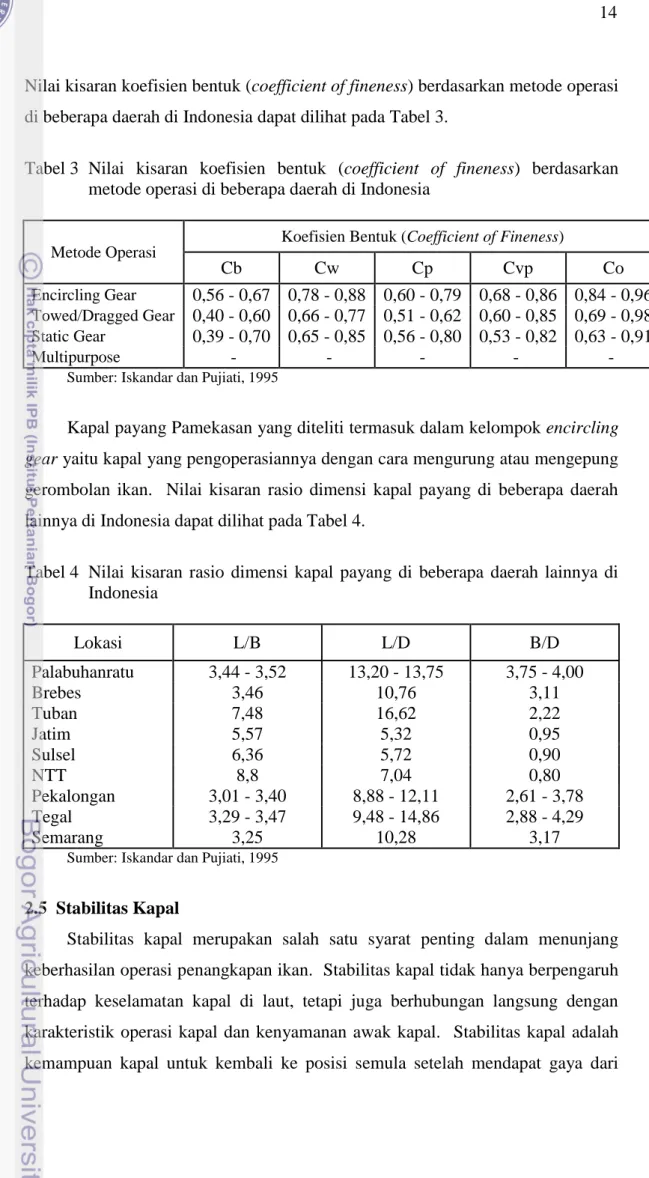
Nilai kisaran koefisien bentuk (coefficient of fineness) berdasarkan metode operasi di beberapa daerah di Indonesia dapat dilihat pada Tabel 3.
Tabel 3 Nilai kisaran koefisien bentuk (coefficient of fineness) berdasarkan metode operasi di beberapa daerah di Indonesia
Metode Operasi
Koefisien Bentuk (Coefficient of Fineness)
Cb Cw Cp Cvp Co
Encircling Gear
0,56 - 0,67 0,78 - 0,88 0,60 - 0,79 0,68 - 0,86 0,84 - 0,96
Towed/Dragged Gear0,40 - 0,60 0,66 - 0,77 0,51 - 0,62 0,60 - 0,85 0,69 - 0,98
Static Gear0,39 - 0,70 0,65 - 0,85 0,56 - 0,80 0,53 - 0,82 0,63 - 0,91
Multipurpose
- - - - -
Sumber: Iskandar dan Pujiati, 1995
Kapal payang Pamekasan yang diteliti termasuk dalam kelompok encircling gear yaitu kapal yang pengoperasiannya dengan cara mengurung atau mengepung gerombolan ikan. Nilai kisaran rasio dimensi kapal payang di beberapa daerah lainnya di Indonesia dapat dilihat pada Tabel 4.
Tabel 4 Nilai kisaran rasio dimensi kapal payang di beberapa daerah lainnya di Indonesia
Lokasi L/B L/D B/D
Palabuhanratu 3,44 - 3,52 13,20 - 13,75 3,75 - 4,00
Brebes 3,46 10,76 3,11
Tuban 7,48 16,62 2,22
Jatim 5,57 5,32 0,95
Sulsel 6,36 5,72 0,90
NTT 8,8 7,04 0,80
Pekalongan 3,01 - 3,40 8,88 - 12,11 2,61 - 3,78
Tegal 3,29 - 3,47 9,48 - 14,86 2,88 - 4,29
Semarang 3,25 10,28 3,17
Sumber: Iskandar dan Pujiati, 1995
2.5 Stabilitas Kapal
Stabilitas kapal merupakan salah satu syarat penting dalam menunjang
keberhasilan operasi penangkapan ikan. Stabilitas kapal tidak hanya berpengaruh
terhadap keselamatan kapal di laut, tetapi juga berhubungan langsung dengan
karakteristik operasi kapal dan kenyamanan awak kapal. Stabilitas kapal adalah
kemampuan kapal untuk kembali ke posisi semula setelah mendapat gaya dari
14
luar kapal atau faktor eksternal. Faktor eksternal meliputi pengaruh angin dan ombak dan adanya pengoperasian alat penangkap ikan di salah satu sisi kapal yang dapat memperbesar kemiringan kapal dan mengurangi kemampuan kapal untuk kembali tegak atau memperkecil nilai momen penegak (righting moment).
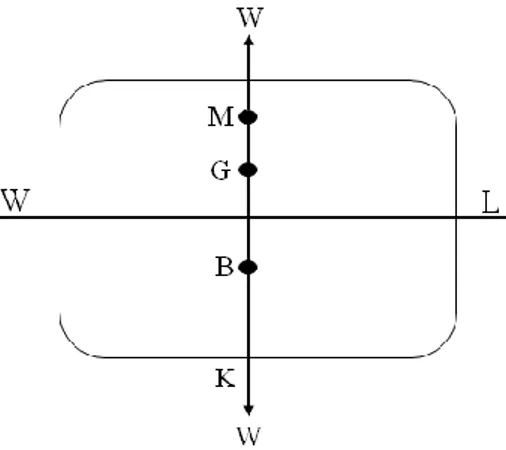
Menurut Taylor (1977) dan Hind (1982) mengatakan bahwa stabilitas pada sebuah kapal dipengaruhi oleh letak titik-titik konsentrasi gaya yang bekerja pada pada sebuah kapal tersebut. Ketiga titik tersebut adalah:
(1) Titik B (centre of buoyancy) yaitu titik khayal yang merupakan pusat seluruh gaya apung yang bekerja ke atas.
(2) Titik G (centre of gravity) yaitu titik khayal yang merupakan pusat seluruh gaya berat pada kapal yang bekerja secara vertikal.
(3) Titik M (metacentre) yaitu titik khayal yang merupakan titik potong dari garis khayal yang melalui titik B dan G saat kapal berada pada posisi miring akibat bekerjanya gaya-gaya pada kapal. Titik M merupakan maksimum bagi titik G, oleh karena itu posisi titik B sangat tergantung dari bentuk badan kapal yang terendam didalam air.
Hind (1982) menjelaskan bahwa ada beberapa persyaratan bagi kapal agar berada pada posisi keseimbangan, yaitu:
(1) Besarnya gaya apung sama dengan besarnya gaya berat kapal;
(2) Pusat gaya apung terletak pada satu garis lurus dengan pusat gaya berat kapal; dan
(3) Titik berat kapal (G) berada di bawah titik metasenter (M).
Gambar 7 Posisi Keseimbangan.
Sumber: Hind, 1982
15
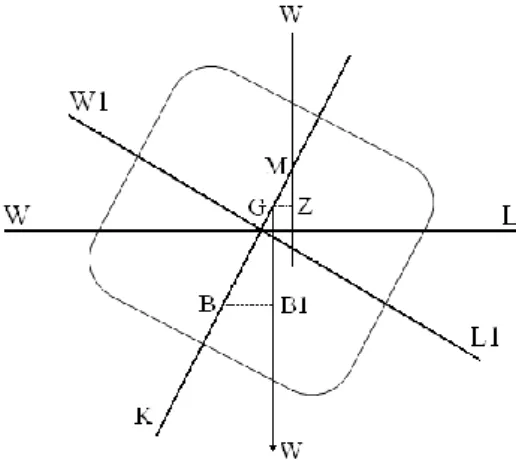
Pada saat kapal terkena momen gaya luar atau external righting moment (Me), kapal menjadi miring dengan sudut θ. Hal ini menyebabkan titik B bergeser dari posisinya semula menuju posisi yang baru B
1, namun titik G tetap pada posisi yang semula. Pada kondisi ini, kapal mengalami momen gaya pengembali atau internal righting moment (Mi). Pada keadaan setimbang, besarnya nilai Me sebanding dengan nilai Mi (Fyson, 1985).
Selanjutnya, interaksi antara berbagai gaya pada kapal yang menyebabkan terjadinya perubahan posisi titik G dan B mengakibatkan terjadinya kondisi yang disebut dengan equilibrium. Taylor (1977) menjelaskan bahwa equilibrium adalah kondisi keseimbangan yang terjadi akibat adanya gaya yang bekerja berlawanan antara gaya apung yang bekerja dengan arah vertikal ke atas dan gaya berat yang bekerja dengan arah vertikal ke bawah. Interaksi keduanya mempengaruhi kestabilan kapal. Kondisi equilibrium terbagi menjadi tiga, yaitu:
(1) Stable equilibrium
Stable equilibrium adalah suatu kondisi dimana kapal dapat segera kembali ke posisi semula setelah gaya yang menyebabkan kapal menjadi miring hilang.
Kondisi ini tercapai bila titik M di atas G, dengan kata lain kapal memiliki tinggi metacenter yang positif. Pada kondisi ini dihasilkan lengan kopel (GZ) yang mampu mengembalikan kapal ke posisi semula karena lengan kopel bergerak berlawanan arah dengan kemiringan kapal.
Gambar 8 Keseimbangan Stabil (Stable Equilibrium)
16
(2) Neutral equilibrium
Neutral equilibrium adalah kondisi saat kapal menjadi miring akibat gaya yang bekerja pada kapal dan kondisi ini tetap tidak berubah. Pada kondisi ini posisi titik G berimpit dengan titik M dan tidak dihasilkan lengan GZ, sehingga kapal tidak dapat kembali ke posisi semula dan tidak juga bergerak terus ke arah kemiringannya. Kondisi ini terjadi bila titik G dan M berhimpit pada satu titik.
Gambar 9 Keseimbangan Netral (Neutral Equilibrium)
(3) Unstable equilibrium
Unstable equilibrium adalah kondisi pada saat kapal dalam keadaan miring (heel) akibat gaya yang bekerja pada kapal dan tidak kembali ke posisi semula melainkan kapal tersebut akan terus ke arah kemiringan kapal tersebut. Hal ini dikarenakan letak titik M di bawah G atau dengan kata lain kapal memiliki tinggi metacenter negatif. Pada kondisi ini dihasilkan lengan GZ yang meneruskan gerak ke arah olengnya kapal.
Gambar 10 Keseimbangan Tidak Stabil (Unstable Equilibrium)
17
Menurut Derrett (1991), ketika kapal dalam keadaan unstable equilibrium atau neutral equilibrium maka langkah yang harus dilakukan adalah menurunkan posisi titik pusat gaya berat kapal. Beberapa metode yang dapat diterapkan, antara lain:
(1) Muatan pada kapal direndahkan;
(2) Muatan dipenuhi di bawah pusat gaya berat kapal;
(3) Muatan dipindahkan dari posisi di atas gaya berat kapal;
(4) Permukaan bebas cairan di dalam kapal dipindahkan.
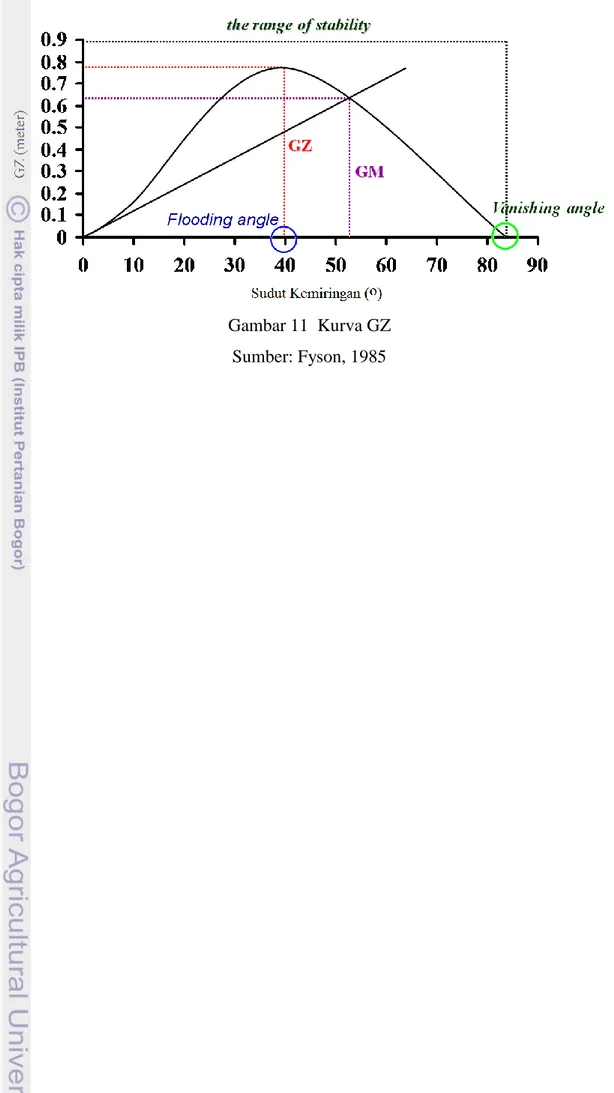
2.6 Kurva GZ
Stabilitas kapal terkait dengan perhitungan GZ pada kapal. Stabilitas dalam bentuk momen pengembali/kopel yang dihasilkan dari titik pusat gravitasi pada saat kapal menjadi miring dengan perubahan berat yang konstan, yang biasanya disajikan dalam bentuk kurva, yaitu kurva GZ. Kurva ini menunjukkan hubungan antara GZ pada berbagai variasi sudut kemiringan pada perubahan berat konstan.
(Fyson, 1985). Kurva GZ meliputi beberapa hal, yaitu (Rawson dan Tupper, 1983):
(1) Kemiringan pada titik awal. Nilai pengembali untuk sudut kemiringan yang kecil adalah proporsional terhadap sudut kemiringan. Nilai tangen GZ pada titik ini menggambarkan tinggi metasenter;
(2) Nilai maksimum GZ, nilainya proporsional dengan momen terbesar yang menyebabkan sudut kemiringan maksimum dimana kapal tidak tenggelam;
(3) Selang stabilitas (range of stability), yaitu selang dimana nilai GZ adalah positif. Biasanya berada pada selang antara (0
o-90
o) dimana kapal akan kembali ke posisi semula setelah momen yang menyebabkan kemiringan hilang;
(4) Area di bawah kurva. Area ini menggambarkan kemampuan kapal untuk menyerap energi yang diberikan oleh angin, gelombang, dan gaya eksternal lainnya.
18
Gambar 11 Kurva GZ Sumber: Fyson, 1985
19
3 METODE PENELITIAN
Metode yang digunakan terdiri dari: metode deskriptif, studi kasus, dan numerik. Metode deskriptif digunakan untuk mendeskripsikan gambar desain dan konstruksi kapal payang. Data desain dan konstruksi didapatkan dari penelitian yang telah dilakukan sebelumnya oleh Arofik (2007) mengenai desain dan konstruksi kapal payang di Pamekasan Madura. Kasus yang diteliti adalah stabilitas kapal payang Pamekasan Madura pada simulasi nilai KG dan draft yang berbeda. Simulasi distribusi muatan dilakukan untuk mengetahui kondisi stabilitas kapal karena adanya perubahan posisi dan jumlah muatan. Metode numerik digunakan untuk menghitung nilai rasio dimensi dan nilai stabilitas kapal payang tersebut kemudian hasilnya diinterpretasikan sehingga lebih mudah untuk dipahami.
3.1 Waktu dan Tempat
Penelitian ini dilaksanakan pada bulan Maret - Mei 2010 di Laboratorium Kapal Perikanan dan Navigasi, Departemen Pemanfaatan Sumberdaya Perikanan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
3.2 Peralatan
Peralatan yang digunakan pada penelitian ini adalah alat tulis, mistar, mal lengkung, flexible curve, dan meja gambar. Perangkat lunak (software) yang digunakan adalah Microsoft Excel, Software PGZ, dan Notepad untuk menghitung stabilitas kapal dalam berbagai kondisi muatan. Obyek penelitian ini adalah salah satu kapal payang di Pamekasan.
3.3 Metode Pengumpulan Data
Data yang digunakan berupa data sekunder berupa hasil penelitian Arofik
(2007) yang berjudul “Desain dan Konstruksi Kapal Payang Madura (Kasus pada
Salah Satu Kapal Payang)”. Data yang digunakan dalam penelitian ini adalah
data dimensi utama kapal, data hidrostatis kapal, dan gambar rancangan (lines
plan) kapal.
3.4 Pengolahan Data
Pengolahan data diawali dengan perhitungan nilai rasio dimensi kapal antara panjang dan lebar (L/B), panjang dan dalam (L/D), dan lebar dan dalam (B/D).
Nilai tersebut kemudian dibandingkan dengan nilai rasio dimensi kapal payang dan kapal jenis encircling gear lainnya di beberapa daerah di Indonesia.
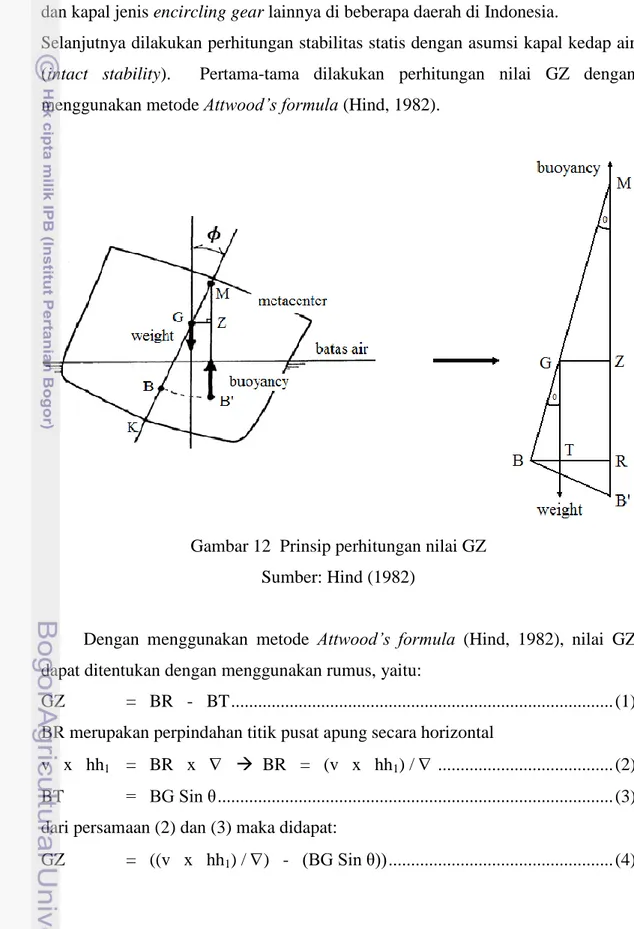
Selanjutnya dilakukan perhitungan stabilitas statis dengan asumsi kapal kedap air (intact stability). Pertama-tama dilakukan perhitungan nilai GZ dengan menggunakan metode Attwood’s formula (Hind, 1982).
Gambar 12 Prinsip perhitungan nilai GZ Sumber: Hind (1982)
Dengan menggunakan metode Attwood’s formula (Hind, 1982), nilai GZ dapat ditentukan dengan menggunakan rumus, yaitu:
GZ = BR - BT ... (1) BR merupakan perpindahan titik pusat apung secara horizontal
v x hh
1= BR x BR = (v x hh
1) / ... (2) BT = BG Sin θ ... (3) dari persamaan (2) dan (3) maka didapat:
GZ = ((v x hh
1) / ) - (BG Sin θ)) ... (4)
21
dimana,
v = volume irisan kapal hh
1= perpindahan irisan
= volume displacement
Metode ini menghitung nilai GZ pada sudut keolengan 0
o- 90
odalam dua kondisi variasi, yaitu kondisi draft desain dan KG desain. Selanjutnya nilai GZ pada tiap sudut keolengan ini diplotkan pada satu grafik yang disebut dengan kurva GZ.
3.5 Analisis Data
Analisis data yang dilakukan merupakan analisis numerik dari nilai-nilai yang diperoleh. Analisis data dilakukan terhadap hasil perhitungan L/B, L/D, dan B/D untuk melihat kesesuaiannya. Nilai rasio dimensi kapal yang diperoleh kemudian dibandingkan dengan nilai rasio dimensi kapal payang dan kapal jenis encircling gear lainnya di beberapa daerah di Indonesia.
Selain itu analisis dan perhitungan dilakukan terhadap hasil pengolahan data stabilitas statis dalam dua kondisi,yaitu:
(1) Kondisi draft (d) desain dengan beberapa variasi nilai titik berat vertikal (KG) kapal tersebut.
(2) Kondisi titik berat vertikal (KG) desain dengan beberapa variasi nilai draft (d) kapal tersebut.
Perhitungan dilakukan dengan menggunakan software PGZ, notepad, dan microsoft excel. Penggunaan software ini memerlukan data yang diperoleh dari pengukuran titik ordinat (y,z) body plan kapal pada masing-masing ordinat sepanjang badan kapal (after perpendicular sampai fore perpendicular). Contoh salah satu titik yang diukur pada salah satu ordinat dapat dilihat pada Gambar 13.
22
Gambar 13 Bodyplan dan posisi titik P
Sumber: Bahan praktikum dinamika kapal perikanan, 2008
Berdasarkan data tersebut, selanjutnya dilakukan analisis dan perhitungan untuk mendapatkan nilai GZ dan membuat kurva GZ statis. Kurva GZ statis merupakan plot nilai GZ pada setiap sudut kemiringan dimana sumbu x menunjukkan sudut kemiringan kapal dan sumbu y menunjukkan besarnya nilai GZ.
23
4 HASIL DAN PEMBAHASAN
4.1 Rasio Dimensi Kapal Payang Pamekasan
Dimensi utama kapal yang terdiri dari panjang total (LOA), panjang antara dua garis tegak (LPP), panjang kapal pada batas air (LWL), lebar (B), dan dalam (D), mempunyai pengaruh yang besar terhadap berbagai karakteristik kemampuan kapal seperti kecepatan, stabilitas, daya dorong, dan sebagainya. Pengaruh tersebut dapat dilihat dari rasio antara beberapa dimensi tersebut. Karakteristik kapal termasuk kapal perikanan dapat dilihat dari nilai rasio dimensinya.
Berdasarkan hal ini, analisis terhadap rasio dimensi kapal sangat penting dilakukan untuk mengetahui kesesuaian antara desain kapal dan peruntukannya.
Alat tangkap payang yang termasuk dalam kelompok encircling gear yaitu alat tangkap yang pengoperasiannya dengan cara mengurung atau mengepung gerombolan ikan memiliki nilai kisaran rasio dimensi yang berlaku di Indonesia, kisaran tersebut akan dibandingkan dengan hasil perhitungan rasio dimensi kapal payang Pamekasan yang diteliti. Kisaran rasio dimensi untuk kapal jenis encircling gear di Indonesia serta hasil perhitungan rasio dimensi untuk kapal payang Pamekasan yang diteliti dapat dilihat pada Tabel 5.
Tabel 5 Kisaran rasio dimensi untuk kapal jenis encircling gear di Indonesia serta hasil perhitungan rasio dimensi untuk kapal payang Pamekasan yang diteliti
Parameter
Kisaran Rasio Dimensi Kapal Jenis Encircling Gear
di Indonesia
Nilai Rasio Dimensi Kapal Payang Pamekasan
yang diteliti
L/B 2,60 - 9,30 3,07
L/D 4,55 - 17,43 11,04
B/D 0,56 - 5,00 3,60
Sumber: Iskandar dan Pujiati, 1995
Nilai rasio dimensi panjang dan lebar (L/B), panjang dan dalam (L/D), dan
lebar dan dalam (B/D) untuk kapal payang Pamekasan yang diteliti semuanya
berada pada kisaran rasio dimensi kapal jenis encircling gear di Indonesia. Hal
ini menunjukkan bahwa karakteristik dimensi kapal payang Pamekasan yang
diteliti tidak berbeda dengan kapal lainnya di Indonesia yang mengoperasikan alat
tangkap dengan cara dilingkarkan (encircling gear). Nilai L/B sebesar 3,07 relatif mendekati batas bawah dibandingkan batas atasnya, ini menunjukkan bahwa tahanan gerak yang dialami kapal cukup besar sehingga berpengaruh buruk terhadap kecepatan kapal tersebut. Nilai L/D sebesar 11,04 relatif mendekati batas atas dibandingkan batas bawahnya, ini menunjukkan bahwa kekuatan memanjang kapal (longitudinal strength) melemah sehingga kapal kurang tahan terhadap gerakan lengkung yang mengarah ke atas maupun ke bawah. Nilai B/D sebesar 3,60 relatif mendekati batas atas dibandingkan batas bawahnya, ini menunjukkan bahwa stabilitas kapal cukup baik akan tetapi kemampuan gerak (propulsive ability) memburuk.
Iskandar dan Pujiati (1995) memberikan nilai kisaran rasio dimensi kapal payang di beberapa daerah lainnya di Indonesia. Nilai tersebut akan dibandingkan dengan nilai kisaran rasio dimensi kapal payang Pamekasan yang diteliti. Nilai kisaran tersebut dapat dilihat pada Tabel 6.
Tabel 6 Nilai kisaran rasio dimensi kapal payang Pamekasan yang diteliti serta nilai kisaran rasio dimensi kapal payang di beberapa daerah lainnya di Indonesia
Lokasi L/B L/D B/D
Palabuhanratu 3,44 - 3,52 13,20 - 13,75 3,75 - 4,00
Brebes 3,46 10,76 3,11
Tuban 7,48 16,62 2,22
Jatim 5,57 5,32 0,95
Sulsel 6,36 5,72 0,90
NTT 8,8 7,04 0,80
Pekalongan 3,01 - 3,40 8,88 - 12,11 2,61 - 3,78
Tegal 3,29 - 3,47 9,48 - 14,86 2,88 - 4,29
Semarang 3,25 10,28 3,17
Pamekasan 3,07 11,04 3,60
Sumber: Iskandar dan Pujiati, 1995