SISTEM MONITORING KAPAL DI SELAT
SINGAPURA BERBASIS LABVIEW
TUGAS AKHIR
Oleh:
NAMA : ARDIAN BUDI KUSUMA ATMAJA
NIM : 4211531009
PROGRAM STUDI TEKNIK MEKATRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI BATAM
2017
SISTEM MONITORING KAPAL DI SELAT SINGAPURA
BERBASIS LABVIEW
TUGAS AKHIR
Oleh:
NAMA : ARDIAN BUDI KUSUMA ATMAJA
NIM : 4211531009
Disusun untuk memenuhisalah satu syarat kelulusan Program Diploma IV Program Studi Teknik Mekatronika
Politeknik Negeri Batam
PROGRAM STUDI TEKNIK MEKATRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI BATAM
2017
iii
SISTEM MONITORING KAPAL DI SELAT SINGAPURA
BERBASIS LABVIEW
Nama mahasiswa : Ardian Budi Kusuma Atmaja
NIM : 4211531009
Pembimbing I : Nur Sakinah Asaad, S.T., M.T
Pembimbing II : Didi Istardi, M.Sc
Email : [email protected]
ABSTRAK
Sistem operasi AIS (Automatic Identification System) dimanfaatkan untuk pemantauan lalu lintas pelayaran kapal yang melewati Selat Singapura yang merupakan jalur pelayaran Internasional. Data real-time kapal yang diperoleh dari receiver AIS merupakan data mentah yang harus dikonversi (decode) agar dapat ditampilkan dan dimanfaatkan dengan baik. Sistem terdiri atas perangkat keras yang berfungsi sebagai penerima data AIS dan perangkat lunak berupa AIS decode yang dikembangkan dengan bahasa pemrograman LabVIEW yang difungsikan untuk penyimpanan, pengolahan serta menampilkan data AIS di google map secara real-time. Pemprograman LabVIEW memudahkan user dalam melakukan pemantauan lalulintas kapal karena program LabVIEW memvisualisasi secara real-time koordinat kapal (longitude dan latitude) ke google map dengan tingkat keakurasian koordinat kapal 99.61%. Metode dalam melakukan decode dari data AIS menjadi data kapal terdiri dari 3 tahap yaitu: data AIS dengan tipe data char dikonversi ke decimal, data desimal dikonversi ke biner dan
mirror hasil data biner, mengelompokkan biner sesuai ITU Recommendation M.1371 dan
konversi kelompok biner dengan pembacaan MSB ke desimal. Hasil dari decode data AIS berupa MMSI, status navigasi, Rate of Turn (ROT), kecepatan kapal, posisi kapal (Longitude dan Latitude), Course Over Ground (COG), True Heading (HDG), Time
Stamp, RAIM flag dan Radio status.
Keywords: AIS (Automatic Identification System), Kapal, Selat Singapura, AIS Receiver, AIS Decode
iv
LABVIEW-BASED VESSEL MONITORING SYSTEM AT
SINGAPORE STRAIT
Name of Student : Ardian Budi Kusuma Atmaja
Student ID : 4211531009
Advisor I : Nur Sakinah Asaad, S.T., M.T
Advisor II : Didi Istardi, M.Sc
Email : [email protected]
ABSTRACT
AIS (Automatic Identification System) operation system is used for cruise vessel traffic at Singapore straits which an international shipping lanes. Vessel real-time data obtained from AIS receiver were raw data that to be had converted (decode) so they can be displayed and used well. The system consisted of hardware functioned as an AIS data receiver and software form AIS decode with developed by using labVIEW programming language which functioned for saving, processing and displaying AIS data at google maps in real-time. LabVIEW programming facilitated users to vessel traffic monitoring
because the LabVIEW programming displayed in real-time the vessel
coordinate(longitude and latitude) to google maps with a level of 99.61% vessel coordinate accuracy. The method of decoding from AIS data into vessel consisted of three stages: AIS data with char data type converted to decimal, decimal data type converted to binary and mirrors binary data results, binary grouping according to ITU Recommendation M.1371 and binary grouping conversion to decimal using MSB method. The results from AIS data decode MMSI, navigation status, Rate of Turn (ROT), vessel speed, vessel position (Longitude and Latitude), Course Over Ground (COG), True Heading (HDG), Time Stamp, RAIM flag and Radio Status.
Keywords: AIS (Automatic Identification System), Vessel, Singapore Strait, AIS
v
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Allah SWT atas rahmat dan hidayah-Nya sehingga penulis dapat menyelesaikan Tugas Akhir ini yang berjudul “ Sistem Monitoring Kapal Diselat Singapura Berbasis LabVIEW ”.
Tugas Akhir ini penulis susun guna memenuhi persyaratan untuk memperolehh gelar Sarjana Terapan Teknik (S.Tr.T.) pada program Studi Teknik Mekatronika di Politeknik Negeri Batam.
Penulis menyadari bahwa Tugas Akhir ini tidak akan terwujud tanpa adanya bantuan dari berbagai pihak, maka pada kesempatan ini izinkan penulis menyampaikan penghargaan dan ucapan syukur dan terima kasih yang sebesar–besarnya kepada:
1. Allah Subhanahu WaTa’ala dimana penulis telah mendapatkan ridho-Nya.
2. Nabi Muhammad shallallahu alaihi wasallam yang menjadi suri tauladan bagi penulis. 3. Bapak Rustamaji dan Ibu Srimurwani Widiantari selaku orang tua penulis yang telah mendidik, mendoakan, memberi semangat, dukungan, air mata, mengajarkan penulis untuk pantang menyerah dan membuat semuanya menjadi mungkin serta yang telah banyak berkorban jiwa dan raga demi kesuksesan penulis.
4. Bapak Dr. Priyono Eko Sanyoto selaku Direktur Politeknik Negeri Batam. 5. Bapak Sumantri Kurniawan, MT dan. selaku Ketua Jurusan Teknik Elektro.
6. Ibu Nur Sakinah Asaad, MT. dan Bapak Didi Istardi, M.Sc selaku pembimbing pada Tugas Akhir ini serta terima kasih atas arahan dan waktu yang telah diberikan kepada penulis.
7. Bapak Hendra Saputra selaku ketua pelaksana penelitian terkait AIS receiver.
8. Seluruh dosen pengajar Teknik Mekatronika, terima kasih atas ilmu yang bermanfaatnya.
vi
DAFTAR ISI
PERNYATAAN KEASLIAN TUGAS AKHIR ... i
LEMBAR PENGESAHAN ... ii
ABSTRAK ... iii
ABSTRACT ... iv
KATA PENGANTAR ... v
DAFTAR ISI ... vi
DAFTAR GAMBAR ... vii
DAFTAR TABEL ... viii
BAB 1. PENDAHULUAN ... 1 1.1. Latar Belakang ... 1 1.2. Perumusan Masalah ... 2 1.3. Batasan Masalah ... 3 1.3. Tujuan Penelitian ... 3 1.4. Manfaat Penelitian ... 3 1.5. Sistematika Penulisan ... 4
BAB 2. DASAR TEORI ... 5
2.1. Prinsip Kerja Automatic Identification System (AIS) ... 5
2.2. AIS Decode ... 9
2.3. Penggunaan data AIS ... 11
BAB 3. PERANCANGAN SISTEM ... 12
3.1. Modul Penerima Data AIS ... 13
3.2. Pengolahan data AIS ... 14
3.2.1. Data ASCII Dikonversi Menjadi Biner ... 15
3.2.2. Implementasi Konversi Char ke Biner Menggunakan Program LabVIEW . 18 3.3. Lokasi Penelitian ... 30
3.4. Pengambilan Data ... 31
BAB 4. HASIL DAN ANALISIS ... 32
4.1. Hasil Data Decode dan Data AIS(NMEA Message) ... 32
4.2. Pengujian Koordinat Kapal ... 33
BAB 5. KESIMPULAN DAN SARAN ... 36
5.1. Kesimpulan ... 36
5.2. Saran... 36
DAFTAR PUSTAKA ... 37
Lampiran 1 Contoh Data AIS(NMEA Message) dan Hasil AIS Decode Dengan Marine Traffic ... 39
Lampiran 2 Lampiran Program LabVIEW ... 40
vii
DAFTAR GAMBAR
Gambar 2.1 Konsep Kerja AIS ... 5
Gambar 2.2 Cara Kerja AIS ... 6
Gambar 2.3 Instalasi Peralatan AIS ... 7
Gambar 3.1 Proses Pengiriman dan Pengolahan Data AIS ... 12
Gambar 3.2 Antena Penangkap Sinyal AIS ... 13
Gambar 3.3 Pemasangan Antena di Lantai 9 Politeknik Negeri Batam ... 13
Gambar 3.4 AIS Receiver ... 14
Gambar 3.5 Skema Modul Penerimaan Data AIS ... 14
Gambar 3.6 Blok Diagram Proses Decode ... 15
Gambar 3.7 Sub Program Pembagian Karakter Data AIS ... 18
Gambar 3.8 Front Panel Hasil Pembagian Data AIS ... 19
Gambar 3.9 Sub Program Decoding ... 19
Gambar 3.10 Front Panel Sub Program Decoding ... 20
Gambar 3.11 Program Decode LabVIEW ... 21
Gambar 3.12 Case Structure Program Repeat Indicator ... 21
Gambar 3.13 Case Structure Program MMSI ... 21
Gambar 3.14 Case Structure Program Navigation Status ... 22
Gambar 3.15 Case Structure Program Rate of Turn ... 22
Gambar 3.16 Case Structure Program Speed Over Ground ... 22
Gambar 3.17 Case Structure Program Accuracy ... 23
Gambar 3.18 Case Structure Program longitude dan latitude ... 23
Gambar 3.19 Case Structure Program True Heading ... 24
Gambar 3.20 Case Structure Program Timestamp ... 24
Gambar 3.21 Case Structure Program Maneuver Indicator ... 24
Gambar 3.22 Case Structure Program Spare ... 25
Gambar 3.23 Case Structure Program RAIM Flag ... 25
Gambar 3.24 Case Structure Program Radio Status ... 25
Gambar 3.25 Front Panel Decode LabVIEW ... 26
Gambar 3.26 Penyimpanan Data AIS Software AIS Receiver ... 26
Gambar 3.27 Database AIS Sebelum di Decode ... 27
Gambar 3.28 Flow Chart Program LabVIEW ... 28
Gambar 3.29(a) Data Hasil AIS Decode dengan LabVIEW (b) Database Hasil Decode 30 Gambar 3.30 Lokasi Penelitian dan Lokasi AIS Station ... 31
Gambar 3.31 Pengolahan Data Kepadatan Lalu Lintas Kapal Menggunakan AIS ... 31
Gambar 4.1 Hasil Decode Data AIS(NMEA Message) ... 32
Gambar 4.2 Menggunakan Software Marine Traffic ... 34
viii
DAFTAR TABEL
Tabel 2.1 Informasi Data AIS ... 8
Tabel 2.2 Tipe Pesan Pada Kelas A ... 8
Tabel 2.3 Lama pengiriman Data Kapal Kelas A Untuk Informasi Berubah-ubah ... 9
Tabel 2.4 AIS Decode Message ... 10
Tabel 3.1 Standar Konversi Tipe Data Char, ASCII, Desimal dan Biner ... 16
Tabel 3.2(a) Proses Konversi Bilangan Char Menjadi Biner 6bit Perkarakter Data AIS 16 Tabel 3.2(b) Proses Konversi Bilangan Char Menjadi Biner 6bit Perkarakter Data AIS 17 Tabel 3.2(c) Proses Konversi Bilangan Char Menjadi Biner 6bit Perkarakter Data AIS 17 Tabel 4.1 Tabel Hasil Perbandingan Data Percobaan Dengan Data Marine Traffic ... 33
1 BAB I
PENDAHULUAN
1.1 Latar Belakang
Indonesia merupakan negara kepulauan terbesar di dunia, wilayah teritorial
kelautan Indonesia sekitar 5,8 juta km2 atau 75% dari total wilayah [1]. Wilayah kelautan
tersebut sangat luas yang berpotensi menjadi tempat lalu lintas kapal yang sangat padat, salah satu kepadatan lalu lintas kapal ini terdapat di perbatasan antara Batam (Indonesia) dengan negara Singapura atau terletak pada perairan Batam dan selat Singapura. Perairan Batam dan selat Singapura merupakan salah satu jalur pelayaran penting di dunia yang menghubungkan antara Samudera Hindia dengan Laut Cina Selatan dan Samudra Pasifik. Selat Malaka (perairan Batam) ditetapkan sebagai salah satu selat paling padat di dunia yang digunakan untuk pelayaran internasional. Lebih dari 60.000 kapal melewati Selat tersebut pertahunnya [2].
Perairan Batam, khususnya pada wilayah bagian utara merupakan daerah yang strategis karena posisinya berada pada jalur pelayaran internasional dan memisahkan antara Indonesia-Malaysia dan Indonesia-Singapura. Berdasarkan data penelitian Hendra et all (2013) [3], ada sekitar 1500 kapal perhari yang berlayar di Selat Malaka dan Singapore. Perairan Batam bagian utara merupakan jalur yang sibuk, bukan saja sebagai jalur lalu lintas pelayaran internasional, tetapi juga sebagai jalur pelayaran regular antara Batam-Singapura dan Batam-Malaysia.
AIS adalah sebuah sistem pelacakan otomatis yang terdapat pada kapal dan system identifikasi pelayanan lalu lintas kapal tersebut. Vessel Traffic Sevices (VTC) digunakan untuk mengidentifikasi dan mengirimkan atau menerima informasi. Data yang diterima terdapat dua tipe, yang pertama adalah elektronik pertukaran data dengan kapal lain di dekatnya, BTS AIS, dan satelit, atau kapal tersebut secara langsung mengirimkan data. Dalam proses monitoring kapal, AIS mampu mengidentifikasi data kapal berupa
Maritime Mobil Service Identity (MMSI), kecepatan kapal (Speed over ground), posisi
kapal (langitude dan latitude), Navigation Status, Course Over Ground (COG) dan lain-lain. Informasi data yang direkam oleh AIS adalah data real-time kapal yang dikirim setiap 2 hingga 10 detik tergantung dari kecepatan kapal pada saat kapal berlayar [4,5].
AIS diwajibkan oleh International Maritime Organization (IMO) International
2 sejak 31 Desember 2004 untuk semua kapal kargo dengan Gross Tonnage (GT) lebih dari sama dengan 300 GT pada pelayaran internasional, semua kapal kargo diatas 500 GT dan semua kapal penumpang tanpa memperhatikan ukuran [6].
Automatic Identification System merupakan suatu sistem yang sangat vital dalam
transportasi laut, karena sangat membantu dalam melacak secara otomatis posisi kapal dan dengan pelayanan lalu lintas kapal (VTS) untuk mengidentifikasi dan menemukan kapal dengan media elektronik pertukaran data dengan kapal lain di dekatnya [7].
Fokus dalam tugas akhir ini adalah pengembangan sistem operasi AIS untuk pemantauan lalu lintas pelayaran kapal yang melewati Selat Singapura dan perairan Batam. Data AIS dapat diterima apabila user (pengguna data) memiliki alat penerima pesan AIS berupa AIS Receiver.
Data AIS di dalam tugas akhir ini didapatkan melalui instalasi peralatan AIS sehingga sangat diperlukan instalasi atau pemasangan peralatan dan sistem pendukung secara keseluruhan seperti AIS receiver, antena penangkap sinyal, sistem penyimpan data, aplikasi penerjemah pesan AIS yang tersimpan. Sistem AIS akan merekam data kapal secara terus menerus, sehingga nantinya didapatkan data kapal secara berkelanjutan sepanjang tahun selama peralatan dan sistem tersebut aktif.
Di Indonesia, penggunaan AIS untuk memonitor kapal di Selat Madura telah dilakukan oleh Pitana (2010) dan data didapat dari sistem AIS selain digunakan untuk mengetahui kepadatan lalu lintas kapal, juga digunakan untuk menghitung besar emisi gas buang dan penyebarannya di selat tersebut. Penelitian yang menggunakan data AIS untuk menghitung emisi gas buang di Selat Malaka dilakukan oleh Hendra et al (2013) menggunakan data AIS yang terpasang di Johor Bahru, Malaysia.
Data AIS tidak hanya digunakan untuk mengetahui kepadatan lalu lintas kapal, tetapi juga dapat digunakan untuk berbagai penelitian seperti emisi gas buang kapal [3], penelitian dalam rangka pencegahan tabrakan kapal [8], keselamatan pada kepadatan pelayaran [9] dan safety assessment kapal [10].
1.2 Perumusan Masalah
Data real-time yang diperoleh dari receiver AIS merupakan data mentah (raw
data) dalam bentuk NMEA 0183. Data tersebut harus dikonversi (decode) dan diolah
sebelum digunakan. Permasalahan yang dihadapi di dalam penelitian ini adalah:
1. Bagaimana sistem pengoperasian AIS untuk menerima, mengolah, menyimpan dan menampilkan data AIS kedalam google map secara real-time?
3 2. Bagaimana instalasi peralatan AIS untuk mendapatkan data kapal-kapal yang
berlayar melewati Selat Singapura dan Perairan Batam?
3. Bagaimana lalu lintas pelayaran kapal yang melewati Selat Singapura dan perairan Batam?
1.3 Batasan Masalah
1. Tugas akhir ini difokuskan pada monitoring data pada selat Singapura dan perairan Batam saja dengan jangkauan AIS receiver 100 mil.
2. Proses decode data AIS, menggunakan standar International Telecommunication
Union (ITU) Recommendation M.1371 tipe 1, 2 dan 3 untuk menghasilkan data
kapal sebenarnya.
3. Decode yang dilakukan hanya terbatas pada data MMSI, status navigasi, Rate of
Turn (ROT), kecepatan kapal, posisi kapal (Longitude dan Latitude), Course Over Ground (COG), True Heading (HDG), Time Stamp, RAIM flag dan Radio status. 1.4 Tujuan dan Manfaat
Tujuan dari tugas akhir ini adalah:
1. Merancang sistem pengoperasian atau platform aplikasi decode pesan AIS dan penyimpan data hasil decode berdasarkan standar ITU Recommendation M.1371 berbasis bahasa pemograman LabVIEW.
2. Melakukan instalasi peralatan AIS sebagai penerima data AIS yang dikirim oleh kapal-kapal yang melewati Selat Singapura dan perairan Batam
3. Mengetahui lalu lintas kapal yang melewati Selat Singapura dan Perairan Batam secara real-time.
Manfaat dari tugas akhir ini adalah:
1. Memiliki peralatan dan sistem AIS yang independen di Kampus Politeknik Negeri Batam sehingga mempermudah peneliti dalam penelitian-penelitian yang membutuhkan data AIS khusunya area penelitian di Selat Singapura dan perairan Batam.
2. Memiliki sistem operasi yang mampu menerima, mengolah, menyimpan dan menampilkan data AIS dari peralatan yang dipasang.
3. Dapat pemantauan lalu lintas kapal di Selat Singapura dan Perairan Batam secara
4 1.5 Sistematika Penulisan
Laporan ini disusun dalam beberapa bab untuk memudahkan pemahaman terhadap tugas akhir ini. Oleh karena itu, penulis membagi laporan menjadi beberapa bab dan penjelasan tentang bab per bab dari tugas akhir ini dapat dijelaskan sebagai berikut: Bab I Pendahuluan
Bab ini berisi tentang latar belakang masalah, perumusan masalah, batasan masalah, tujuan dan manfaat, serta sistematika penulisan.
Bab II Dasar Teori
Bab ini membahas mengenai teori-teori penunjang pada penelitian ini, seperti AIS,
AIS Decode dan NMEA 0183.
Bab III Perancangan Sistem
Bab ini berisi rancangan penelitian baik itu langkah/tahapan penelitian, rancangan
hardware maupun software, serta instrumen penelitian yang digunakan selama
mengerjakan tugas akhir. Bab IV Hasil dan Analisis
Bab ini berisi tentang hasil pengukuran dan pengujian yang dilakukan pada penelitian disertai dengan analisa dari hasil pengukuran dan pengujian tersebut.
Bab V Kesimpulan dan Saran
Bab ini berisi kesimpulan yang diperoleh dari hasil analisis, seperti mengapa itu terjadi dan penyebabnya serta cara mengatasinya. Selain itu juga berisi saran untuk penelitian yang sudah dikerjakan, seperti apa yang harus dilakukan untuk penelitian selanjutnya.
5 BAB II
DASAR TEORI
2.1 Prinsip Kerja Automatic Identification System (AIS)
Automatic Identification System adalah sebuah sistem yang digunakan pada kapal
dan VTS atau pelayanan lalu intas kapal yang secara prinsip untuk identifikasi dan lokasi tempat berlayarnya kapal. Tukar-menukar data secara elektronik yang berupa identifikasi, posisi, kegiatan atau keadaan kapal, dan kecepatan, dengan kapal terdekat,
AIS base station ataupun stasiun VTS dan satelit ini disediakan oleh AIS. Informasi ini
dapat ditampilkan pada sebuah layar atau sebuah tampilan Electronic Chart Display
Information System (ECDIS).
AIS diwajibkan oleh IMO International Convention for the Safety of Life at Sea (SOLAS) dan mulai diberlakukan secara efektif sejak 31 Desember 2004 untuk semua kapal kargo dengan Gross Tonnage (GT) lebih dari sama dengan 300 GT pada pelayaran internasional, semua kapal kargo diatas 500 GT dan semua kapal penumpang tanpa memperhatikan ukuran [6].
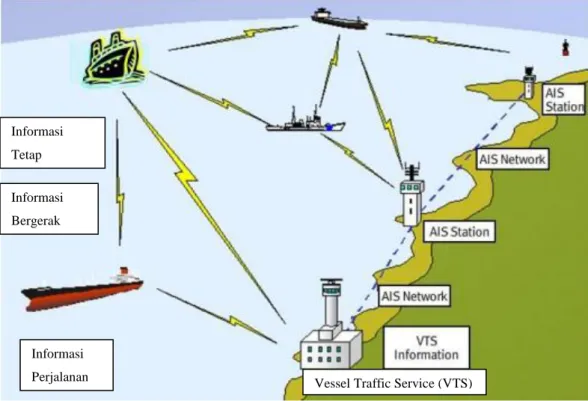
Gambar 2.1 Konsep Kerja AIS
Informasi Perjalanan Informasi Bergerak Informasi Tetap
6 Gambar 2.2 Cara Kerja AIS
AIS receiver berfungsi menerima pesan yang dikirim oleh kapal melalui alat
pengirim data AIS berupa AIS transmitter. Data AIS yang diterima oleh AIS receiver berupa pesan dalam bentuk NMEA Message 0183 yaitu berupa kode dengan karakter-karakter unik. Data AIS berupa NMEA Message 0183 dapat ditampilkan menggunakan peralatan berupa AIS decoder dan AIS chart plotter. AIS decoder berfungsi memecahkan kode NMEA Message 0183 menjadi sebuah data kapal lengkap dan AIS chart plotter dapat menampilkan posisi kapal dalam tampilan grafis, dimana harga kedua peralatan tersebut relatif mahal.
Di dalam penelitian ini, fungsi AIS decode akan digantikan oleh sebuah platform aplikasi yang akan dirancang menggunakan bahasa pemrograman LabVIEW. Aplikasi yang akan dirancang berfungsi untuk memecahkan (decode) data AIS berupa NMEA
Message 0183 menjadi data kapal menggunakan standar ITU Recommendation M.1371,
"Technical Characteristics for a Universal Shipborne Automatic Identification System
Using Time Division Multiple Access" untuk informasi pesan (broadcasts message) AIS
Class A dan Class B yang dikirim oleh setiap kapal setiap 2 hingga 10 detik selama berlayar dan setiap 3 menit selama posisi berlabuh [2,4]. Data AIS hasil decode yang diolah dalam penelitian ini berupa:
1. MMSI number – nomor identitas kapal dengan informasi pada setiap kapalnya 2. Navigation status – merupakan status dari kapal seperti baru ber layar atau
menurunkan jangkar
7 4. Speed overground – resolusi 1/10 dari 0 sampai 120 knot.
5. Position accuracy
6. Longitude – untuk 1/1000 menit dan latitude – untuk 1/10000 menit 7. Couerse over ground – relative to true north to 0.1 degree
8. True heading – 0-359 derajat yang dihasilkan dari gyro 9. Time stamp
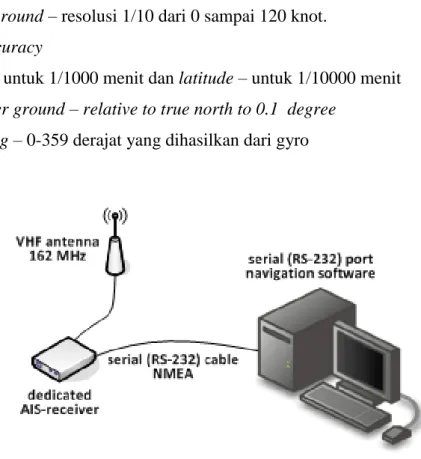
Gambar 2.3 Instalasi Peralatan AIS
AIS dimaksudkan untuk membantu petugas yang memantau kapal dan mengizinkan otoritas maritim untuk mengikuti dan memonitor pergerakan kapal. Alat ini bekerja dengan terintegrasi yang distandarisasi sistem penerima VHF dengan sebuah system navigasi elektronik, misalnya sebagai Long Range Navigation Version C (LORAN-C) atau pengirim Global Positioning System, dan sensor navigasi lainnya yang terdapat didalam kapal (gyrocompass, indikator penghitung manuver, dan lain-lain). Penggunaan AIS tersebut bertujuan untuk menghindari kecelakaan akibat tabrakan karena keterbatasan kemampuan radio. Penggunaan AIS diutamakan sebagai alat peninjau dan untuk menghindari resiko tabrakan daripada sebagai sistem pencegah tabrakan secara otomatis, sesuai dengan Regulations for Preventing Collisions at Sea (COLREGS, 1972). Manfaat AIS lainnya didalam bidang perkapalan adalah untuk memonitor lokasi dan pergerakan kapal sebagai fungsi traffic management, pencegahan tabrakan antar kapal dan aplikasi keselamatan pelayaran lainnya [11].
Fungsi utama AIS adalah untuk identifikasi kapal, pengawasan, komunikasi dan
status report. Informasi yang disediakan oleh AIS terdiri dari 4 tipe yaitu informasi statis
8 (voyage related information) dan informasi yang berhubungan dengan keselamatan kapal [6].
Tabel 2.1 Informasi Data AIS [6]
Katagori Isi
Informasi Tetap
MMSI identitas kapal Nama kapal
Tipe kapal Ukuran kapal
Lokasi penempatan antena di kapal
Informasi Berubah
Posisi kapal Kegiatan kapal Kecepatan Kapal Arah belok Kapal Kecepatan putar kapal
Informasi pelayaran
Keadaan Pelayaran /laut Tujuan Pelayaran
Perkiraan waktu tempuh dari keberangkatan hingga tujuan Rencana Pelayaran
Pesan Kapal Keadaan cuaca
AIS mengirimkan informasi pesan (broadcasts message) setiap 2 hingga 10 detik selama berlayar dan setiap 3 menit selama posisi berlabuh [5,6].
Tabel 2.2 Tipe Pesan Pada Kelas A [6]
Tipe Pesan Deskripsi Lama Pengiriman
Tetap MMSI, nama kapal, Besar
kapal, dll.
6 menit
Berubah-ubah posisi, waktu, kecepatan kapal,
status kapal, dll.
2 detik sampai 3 menit, sesuai dengan kecepatan kapal.
Informasi pelayaran Tujuan dan tipe kapal 6 menit
Keamanan Pesan terkait keamanan kapal Bila diperlukan
Data Biner Pengiriman data Bila diperlukan
Kontrol Penyelarasan waktu Bila diperlukan
Aplikasi panjang
dan jarak
9 Tabel 2.3 Lamanya Pengiriman Data Kapal Kelas A Untuk Informasi Berubah-ubah
Ship's dynamic conditions Reporting interval
Kapal dengan kecepatan rendah 3 knots, berlabuh dan menurunkan
3 menit Kapal dengan perpindahan cepat saat
berlabuh dan menurunkan jangkar
10 detik
Kapal dengan kecepatan 0-14 knots 10 detik
Kecepatan 0-14 knots dan maneuver 3 1/3 detik
Kecepatan kapal 14-23 knots 6 detik
Kecepatan 14-23 knots dan maneuver 2 detik
Kecepatan kapal > 23 knots 2 detik
Kecepatan > 23 knots dan manuever 2 detik
AIS bekerja dengan menggunakan frequensi sangat tinggi (Very High Frequency – VHF), yaitu antara 156 – 162 MHz. AIS memiliki 2 tipe yaitu Class A dan Class B [4] : 1. Class A. Peralatan AIS (Shipborne mobile equipment) yang memenuhi persyaratan
IMO Resolution A.917 (22) seperti dijelaskan diatas yang menggunakan skema akses komunikasinya menggunakan sistim SO-TDMA (Self-organized Time Division
Multiple Access)
2. Class B. Peralatan AIS (Shipborne mobile equipment) menggunakan daya yang kecil, biaya relatif murah untuk penggunaan pasar non-SOLAS. AIS Class B tidak mampu mengirimkan beberapa data seperti Class A diantaranya:
Tidak dapat mengirimkan data IMO number or call sign
Tidak dapat mengirimkan data ETA or destination
Tidak dapat mengirimkan data navigational status
Hanya mampu menerima data keselamatan tapi tidak dapat mengirimkan data
Tidak dapat mengirimkan data rate of turn information
Tidak dapat mengirimkan data maximum present static draught
2.2 AIS Decode
Data AIS bersifat rahasia menggunakan kode biner yang harus dipecahkan menggunakan ITU M.1371-2 standard. AIS Message menggunakan format NMEA 0183. Standar NMEA menggunakan dua kalimat yaitu !AIVDM (Diterima Data dari kapal lain) dan !AIVDO (informasi kapal sendiri). Dalam hal ini, instalasi AIS hanya menerima pesan !AIVDM. Contoh pesan NMEA pada AIS adalah:
10 !AIVDM,1,1,,A,14eG;o@034o8sd<L9i:a;WF>062D,0*7D
Urutan kalimat NMEA:
!AIVDM Identitas pesan AIS: AIVDM = Pesan kapal lain
AIVDO = Pesan kapal sendiri
1 Banyaknya bagian dalam satu pesan
1 Nomor bagian sebanyak pesan yang dikirim AIS
Nomor pesan beruntun dalam beberapa kalimat pesan yang terpisah
A Channel pada tipe radio yang digunakan (A dan B)
14eG;... Data identitas kapal
0* Akhiran dari data
7D Cek kebenaran data NMEA
AIS receiver data diterima dalam bentuk ASCII data packets dalam bentuk data biner, menggunakan format data NMEA 0183. Kode biner yang terdapat pada pesan NMEA menggunakan 6 bit ataupun 8 bit. Pemecahan pesan AIS menggunakan standar ITU Recommendation M.1371, "Technical Characteristics for a Universal Shipborne
Automatic Identification System Using Time Division Multiple Access". Format ASCII
telah ditetapkan dalam IEC-PAS 61162-100, "Maritime navigation and
radiocommunication equipment and systems". Proses konversi AIS message
menggunakan standar ITU dan ASCII akan menghasilkan pesan AIS sebagai berikut: Tabel 2.4 AIS Decode Message [4]
Bit Panjang Deskripsi
0-5 6 Message Type
6-7 2 Repeat Indicator
8-37 30 MMSI
38-41 4 Status Kapal
42-49 8 Rate of Turn (ROT)
50-59 10 Speed Over Ground (SOG)
60-60 1 Position Accuracy
61-88 28 Longitude
89-115 27 Latitude
116-127 12 Course Over Ground (COG)
128-136 9 True Heading (HDG)
137-142 6 Time Stamp
11
145-147 3 Spare
148-148 1 RAIM flag
149-167 19 Radio status
2.3 Penggunaan data AIS
Penggunaan AIS sebagai fungsi monitoring dan tracking kapal dilakukan oleh Pitana (2010) [13] pada area Selat Madura, Indonesia untuk mengetahui kepadatan lalu lintas kapal. Mengembangkan sistem AIS menggunakan skema VRMS (Vessel real-time
monitoring system) untuk mendapatkan posisi kapal secara real-time dan informasi lain
pada AIS yang dapat ditampilkan pada beberapa client. Sistem tersebut dapat beroperasi secara stabil dan memiliki interface yang baik sehingga dapat diguakan untuk mengelola kapal dan secara efektif mampu meningkatkan keselamatan selama kapal berlayar. Penggunaan AIS yang lebih luas sebagai fungsi tracking kapal dilakukan dengan memasang penangkap data AIS (AIS receiver) diluar angkasa yaitu pada nano-satellites, AISSat-1 and AISSat-2 dan International Space Station. Pemasangan tersebut bertujuan untuk meningkatkan kemampuan tracking kapal pada penggunaan AIS [14,15]. Pengembangan sistem AIS pada satelit, juga dilakukan oleh di Indonesia oleh LAPAN (Lembaga Penerbangan dan Antariksa Nasional) pada tahun 2010. Perangkat penerima data AIS diterbangkan bersama satelit LAPAN-Ekuatorial (LAPAN-A2 dan LAPAN ORARI) yang bertujuan untuk pemantauan kapal di wilayah Indonesia. Pengembangan AIS berbasis satelit tersebut berupa pengembangan sistem pengoperasian yang mampu menerima, mengolah, meyimpan dan menampilkan data dari AIS setelah AIS diluncurkan bersama satelit [16].
Data-data kapal yang didapat dari sistem AIS dapat digunakan untuk berbagai hal seperti estimasi emisi gas buang kapal dengan menggunakan berbagai metode perhitungan emisi berdasarkan data AIS seperti metode Ship Traffic, Energy, and
Environment Model (STEEM), Transport Emissions and Energy Consumption Methodology (MEET Methodology) dan DMS-URBAN model, Atmospheric Dispersion Modelling System (ADMS. Data AIS juga dapat disajikan secara geografis untuk melihat
lalu lintas kapal antar pelabuhan dan mengetahui rute kapal secara global dengan menggunakan geographic information system (GIS). Data AIS juga dapat digunakan untuk pencegahan tabrakan kapal, keselamatan pelayaran pada kepadatan pelayaran serta safety assessment kapal.
12 BAB III
PERANCANGAN SISTEM
Data real-time kapal yang diperoleh dari receiver AIS merupakan data mentah (raw data) dalam bentuk NMEA message 0183. Data tersebut harus dikonversi (decode) dan diolah lebih dahulu agar dapat ditampilkan dan dimanfaatkan dengan baik. Oleh karena itu diperlukan pengembangan sebuah sistem pengoperasian yang berfungsi menerima, mengolah, menyimpan dan menampilkan data AIS. Sistem pengoperasian AIS yang dikembangkan didalam penelitian ini terbagi menjadi dua bagian:
1. Instalasi perangkat keras sistem AIS berupa antena penangkap sinyal, receiver AIS yang berfungsi sebagai penerima data AIS berupa data mentah (raw data) dalam bentuk NMEA Message 0183 yang dikirim oleh kapal melalui transmitter AIS dan sebuah PC yang berfungsi sebagai tempat penyimpanan data AIS tersebut.
2. Pengembangan perangkat lunak berupa software berbasis bahasa pemrograman LabVIEW yang terdiri dari:
a) Software AIS receiver berfungsi menyimpan data mentah (raw data) AIS yang diterima oleh AIS receiver. Software ini dijalankan pada komputer kecil (mini
pc) yang terpasang pada masing-masing AIS station.
b) Sistem pengiriman data AIS dari AIS station ke komputer server berbasis web. c) Software AIS decode berfungsi merubah data mentah (raw data) AIS dalam
bentuk NMEA message 0183 menjadi data kapal sesuai standar ITU
Recommendation M.1371. Software ini dijalankan pada komputer database
(server). Database hasil decode disimpan dan data dapat divisualisasikan ke dalam google map secara real-time untuk melihat kepadatan lalu lintas kapal.
13 3.1 Modul Penerima Data AIS
Modul penerima data AIS yang akan dipasang pada masing-masing AIS station terdiri dari:
1. Antenna VHF
Gambar 3.2 Antena Penangkap Sinyal AIS
Gambar 3.3 Pemasangan antena di lantai 9 Politeknik Negeri Batam
Antena Vertical VHF yang kami buat dengan menggunakan paralon setinggi 2,8 meter ini digunakan untuk menerima sinyal fekuensi ditunjukan pada Gambar 3.2. Antena yang dipasang di lantai 9 gedung utama Politeknik Negeri Batam yang
14 dituntukan pada Gambar 3.3 ini menpunyai range frekuensi dari 156.025 MHz sampai dengan 162.025 MHz.
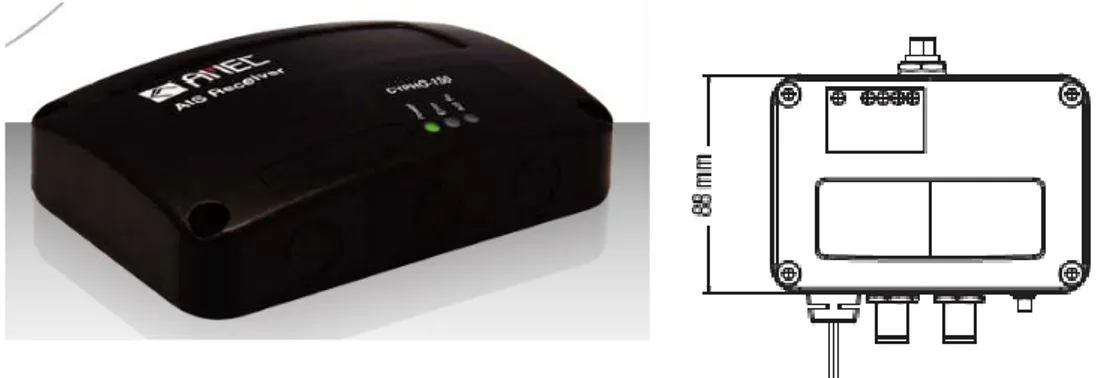
2. AIS receiver
Gambar 3.4 AIS Receiver
AIS receiver yang ditunjukkan pada Gambar 3.4 diatas memiliki fekuensi kerja dari 156.025 MHz sampai 162.025 MHz dengan bandwidth 25 KHz dan data rate 9600bps. Sedangkan untuk supplay AIS receiver ini adalah 12 atau 24 Volt DC serta dapat menggunakan supplay dari USB.
3. Mini PC
Gambar 3.5 Skema Modul Penerima Data AIS
Keseluruhan perangkat keras ini dari antena VHF sebagai penerima frekuensi kemudian masuk ke AIS receiver yang selanjutnya data dari AIS receiver diolah dengan menggunakan mini PC.
3.2 Pengolahan data AIS
Proses medecode terbilang sangat panjang dengan basic konversi bilangan dan harus mengenal tipe karakter pada data asli dan data biner. Tipe data yang digunakn dalam proses decode adalah tipe data char sebagai data input dari data AIS, tipe data
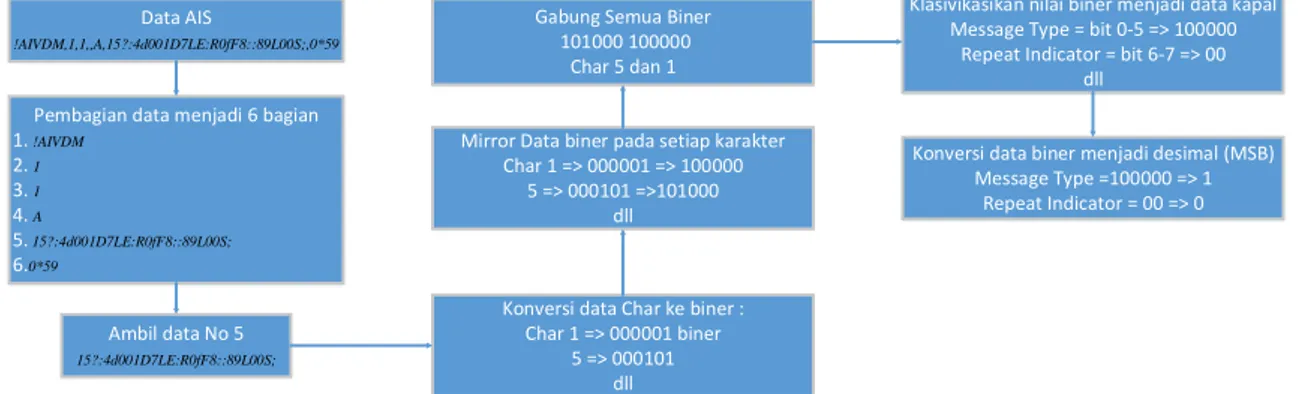
15 ASCII, tipe data desimal dan tipe data biner. Runtutan proses decode dari data AIS menjadi data kapal dapat dilihat pada Gambar 3.6.
Data AIS
!AIVDM,1,1,,A,15?:4d001D7LE:R0fF8::89L00S;,0*59
Konversi data Char ke biner : Char 1 => 000001 biner
5 => 000101 dll
Mirror Data biner pada setiap karakter Char 1 => 000001 => 100000
5 => 000101 =>101000 dll Gabung Semua Biner
101000 100000 Char 5 dan 1
Klasivikasikan nilai biner menjadi data kapal Message Type = bit 0-5 => 100000
Repeat Indicator = bit 6-7 => 00 dll
Konversi data biner menjadi desimal (MSB) Message Type =100000 => 1
Repeat Indicator = 00 => 0 Pembagian data menjadi 6 bagian
1. !AIVDM 2. 1 3. 1 4. A 5. 15?:4d001D7LE:R0fF8::89L00S; 6.0*59 Ambil data No 5 15?:4d001D7LE:R0fF8::89L00S;
Gambar 3.6 Blok Diagram Proses Decode
Program LabVIEW digunakan sebagai penerima data yang ditangkap perangkat keras AIS untuk diolah dari data mentah yang dikirimkan kapal. Data yang diterima berupa data seperti berikut : !AIVDM,1,1,,A,15?:4d001D7LE:R0fF8::89L00S;,0*59 data tersebut kemudian akan disisipkan waktu dan tanggal sebagai data akses waktu pengiriman data kapal dari kapal ke AIS receiver. Data tersebut kemudian dismpan atau di record kedalam file .txt dengan menggunakan program labVIEW. Metode yang dilakukan untuk decode data mentah AIS menjadi data kapal yang sebenarnya adalah sebagai berikut.
3.2.1 Data ASCII Dikonversi Menjadi Biner
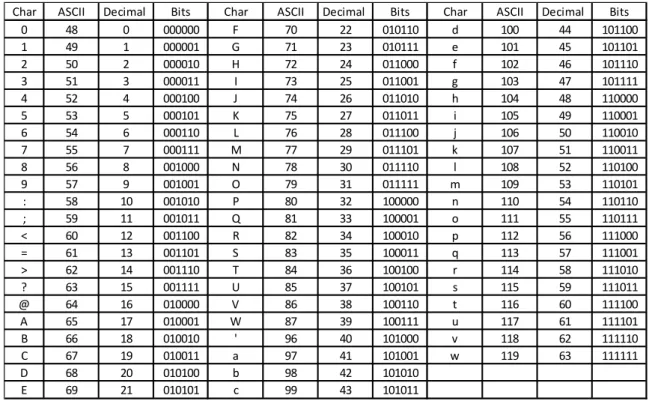
Data mentah AIS !AIVDM,1,1,,A,15?:4d001D7LE:R0fF8::89L00S;,0*59 ini yang akan didicode adalah “ 15?:4d001D7LE:R0fF8::89L00S; ”. Dari tipe data Char diubah menjadi data ASCII, yang kemudian diubah lagi menjadi decimal dan diubah menjadi biner 6 bit. Acuan yang digunakan dalam konversi dari tipe data char menjadi tipe data biner 6 bit ini adalah AIVDM/AIVDO Protocol Decoding ditunjukan pada Tabel 3.1.
16 Tabel 3.1 Standar Konversi Tipe Data Char, ASCII, Desimal dan Biner
Dengan Tabel 3.1 di atas maka data“15?:4d001D7LE:R0fF8::89L00S;” dapat konversi dari data char menjadi bilangan biner 6 bit ditunjukan pada Tabel 3.2, Tabel 3.3 dan Tabel 3.4.
Tabel 3.2 (a) Proses Konversi Bilangan Char Menjadi Biner 6bit Per-karakter Data AIS
Char ASCII Decimal Bits Char ASCII Decimal Bits Char ASCII Decimal Bits
0 48 0 000000 F 70 22 010110 d 100 44 101100 1 49 1 000001 G 71 23 010111 e 101 45 101101 2 50 2 000010 H 72 24 011000 f 102 46 101110 3 51 3 000011 I 73 25 011001 g 103 47 101111 4 52 4 000100 J 74 26 011010 h 104 48 110000 5 53 5 000101 K 75 27 011011 i 105 49 110001 6 54 6 000110 L 76 28 011100 j 106 50 110010 7 55 7 000111 M 77 29 011101 k 107 51 110011 8 56 8 001000 N 78 30 011110 l 108 52 110100 9 57 9 001001 O 79 31 011111 m 109 53 110101 : 58 10 001010 P 80 32 100000 n 110 54 110110 ; 59 11 001011 Q 81 33 100001 o 111 55 110111 < 60 12 001100 R 82 34 100010 p 112 56 111000 = 61 13 001101 S 83 35 100011 q 113 57 111001 > 62 14 001110 T 84 36 100100 r 114 58 111010 ? 63 15 001111 U 85 37 100101 s 115 59 111011 @ 64 16 010000 V 86 38 100110 t 116 60 111100 A 65 17 010001 W 87 39 100111 u 117 61 111101 B 66 18 010010 ' 96 40 101000 v 118 62 111110 C 67 19 010011 a 97 41 101001 w 119 63 111111 D 68 20 010100 b 98 42 101010 E 69 21 010101 c 99 43 101011 Nomor ka ra kter Cha r 0 1 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1 1 0 0 0 0 0 1 0 0 0 0 1 0 1 0 0 0 1 1 1 1 0 0 0 1 0 1 0 0 0 0 0 1 LSB 0 0 1 0 1 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 1 0 0 1 0 0 0 0 1 0 1 0 0 1 1 1 1 0 0 1 0 1 0 0 0 1 0 0 0 0 0 MSB 0 0 1 0 1 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 1 0 0 1 0 0 0 0 1 0 1 0 0 1 1 1 1 0 0 1 0 1 0 0 0 1 0 0 0 0 0 MSB Mes s a ge Type Repea t Indi ca tor
MMSI Na vi ga tion Status
Ra te of Turn Speed Over Ground
Pos i tion Accura cy Longi tude
La titude Cours e Over Ground
True Hea di ng Ti me Stamp Ma nuver Indi ca tor
Spa re RAIM fl a g Ra di o s ts tus 1 5 ? : 4 d 0 0 1 D 10 9 8 7 6 5 4 3 2 1 84/10=8.4 0 0 351438000 0 1 0 351438000 0 1 Des i ma l 84 0
17 Tabel 3.2 (a) merupakan konversi data dari karakter char ke biner dengan hasil desimal pada data kapal Message Type adalah ”1”, Repeat Indicator “0”, MMSI “351438000”,
Navigation Status “0”, Rate of Turn “0” dan Speed Over Ground “8.4”.
Tabel 3.2 (b) Proses Konversi Bilangan Char menjadi Biner 6bit Per-karakter Data AIS
Pada Tabel di atas didapatkan data kapal Position Accuracy “0”, Longitude “104.6” dan
Latitude “1.27” sebagai posisi letak dimana kapal tersebut berada.
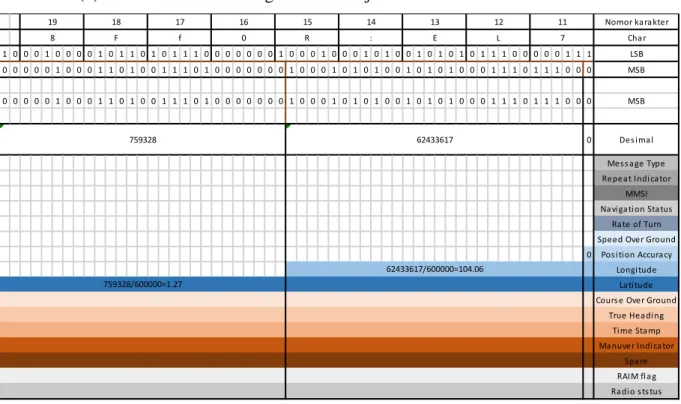
Tabel 3.2 (c) Proses Konversi Bilangan Char menjadi Biner 6bit Per-karakter Data AIS
Nomor ka ra kter Cha r 1 0 0 0 1 0 0 0 0 1 0 1 1 0 1 0 1 1 1 0 0 0 0 0 0 0 1 0 0 0 1 0 0 0 1 0 1 0 0 1 0 1 0 1 0 1 1 1 0 0 0 0 0 1 1 1 LSB 0 0 0 0 0 1 0 0 0 1 1 0 1 0 0 1 1 1 0 1 0 0 0 0 0 0 0 1 0 0 0 1 0 1 0 1 0 0 1 0 1 0 1 0 0 0 1 1 1 0 1 1 1 0 0 0 MSB 0 0 0 0 0 1 0 0 0 1 1 0 1 0 0 1 1 1 0 1 0 0 0 0 0 0 0 1 0 0 0 1 0 1 0 1 0 0 1 0 1 0 1 0 0 0 1 1 1 0 1 1 1 0 0 0 MSB Mes s a ge Type Repea t Indi ca tor
MMSI Na vi ga tion Status
Ra te of Turn Speed Over Ground 0 Pos i tion Accura cy
Longi tude La titude Cours e Over Ground
True Hea di ng Ti me Stamp Ma nuver Indi ca tor
Spa re RAIM fl a g Ra di o s ts tus 0 62433617/600000=104.06 759328/600000=1.27 19 18 17 16 15 14 13 12 11 8 F f 0 R : E L 7 759328 62433617 Des i ma l
18 Setelah dikonversi dari tipe data char menjadi biner 6bit seperti contoh karakter “L” dijadikan biner menjadi 011100 kemudian dibalik nilai pembacaannya menjadi 0011100 setelah itu baru digabung dengan nilai biner dari karakter yang lain seperti pada kolom nomor 4 MSB. Untuk memperoleh nilai pada setiap data kapal sebenarnya maka dari biner tersebut harus dijadikan decimal lagi dengan pembacaan data MSB atau nilai terendah ada di sebelah kiri nilai biner. Contoh nilai True Heading dalam biner adalah 001000001 dan bila di jadikan desimal dengan nilai pembacaan biner MSB adalah 260.
3.2.2 Implementasi Konversi Char ke Biner Menggunakan Program LabVIEW Dari program LabVIEW ini ada beberapa tahap dalam melakukan decode data mentah AIS sehingga menjadi data kapal sebenarnya, diantara tahap-tahap tersebut yaitu:
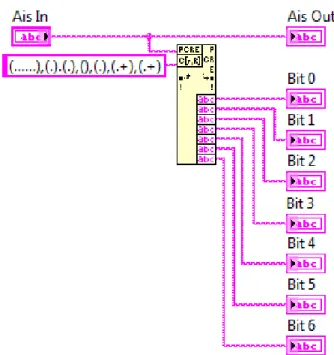
1. Memisahkan Bagian Data AIS yang didicode. Seperti contoh data AIS adalah
!AIVDM,1,1,,A,15?:4d001D7LE:R0fF8::89L00S;,0*59 dan yang diambil dan
didecode adalah bagian “15?:4d001D7LE:R0fF8::89L00S;”. Untuk melakukan
pemisahan bagian tersebut digunakan sub program . Isi dari program ini
memisahkan karakter dengan struktur pembagiannya dengan menggunkan koma “,” dan program pada sub program ditunjukkan pada Gambar 3.7.
Nomor ka ra kter : Cha r 0 0 1 0 1 1 1 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 1 0 0 1 0 0 1 0 0 0 0 0 1 0 1 0 0 0 1 0 LSB 1 1 0 1 0 0 1 1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 1 0 0 1 0 0 0 0 0 1 0 0 0 1 0 1 0 0 0 1 0 1 MSB 1 1 0 1 0 0 1 1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 1 0 0 1 0 0 0 0 0 1 0 0 0 1 0 1 0 0 0 1 0 1 MSB Mes s a ge Type Repea t Indi ca tor
MMSI Na vi ga tion Status
Ra te of Turn Speed Over Ground
Pos i tion Accura cy Longi tude
La titude Cours e Over Ground
True Hea di ng Ti me Stamp Ma nuver Indi ca tor
Spa re 0 RAIM fl a g Ra di o s ts tus 2251 Des i ma l 21 20 ; S 0 0 L 9 8 : 28 27 25 25 24 23 22 2251 0 0 0 2600/10=260 260 46 0 0 46 260 2600
19 Gambar 3.7 Sub Program Pembagian Karakter Data AIS
Dengan Pembagian karakter di atas maka didapatkan haril Bit 0 “!AVIDM”, Bit 1 “1”, Bit 2 “1”, Bit 3 “ “, Bit 4 “A”, Bit 5 “15?:4d001D7LE:R0fF8::89L00S;” dan Bit 6 “0*59”. Dengan begitu data AIS dibagi menjadi 6 buah data dengan data Bit 5 adalah data yang dilakukan decode. Program LabVIEW ini hasil pembagiannya dapat dilihat pada front panel seperti pada Gambar 3.8.
Gambar 3.8 Front Panel Hasil Pembagian Data AIS
20
Dari keluaran Sub program BIT DAT maka diperoleh data
“15?:4d001D7LE:R0fF8::89L00S;”, kemudian data tersebut dikonversi menjadi decimal kemudian dikonversi lagi menjadi data biner. Dengan menggunakan program LabVIEW secara berturut-turut dilakukan pembacaan karakter dan dilakukan konversi data ke biner seperti ditunjukan pada Gambar 3.9.
Gambar 3.9 Sub Program Decoding
Gambar 3.10 Front Panel Sub Program Decoding
Karena konversi secara langsung dengan menggunakan Number to Boolean
21 membalik nilai menjadi 100000, kemudian setelah dibalik maka diurutkan hasil dari semua karakter menjadi satu deret array nilai biner.
3. Konversi Data Biner Menjadi Data Kapal
Seperti contoh data kapal MMSI yang dimulai dari bit ke 8 sampai 37 dengan panjang bit adalah 30. Apabila kita mengacu pada Tabel 3.2 maka dihasilkan data
biner . Konversi
dari biner ke desimal adalah dengan metode MSB (pembacaan dimulai dari sebelah kiri). Hasil dari konversi bilangan biner dari bit 8 sampai 37 adalah 351438000, maka MMSI dari data AIS !AIVDM,1,1,,A,15?:4d001D7LE:R0fF8::89L00S;,0*59 adalah 351438000. Implementasi ke program LabVIEW untuk mengubah nilai biner menjadi data kapal dapat dilihat pada Gambar 3.11.
Gambar 3.11 Program Decode LabVIEW
Gambar 3.11 merupakan blok diagram dengan Case Structure “..5” merupakan pemilihan untuk menghasilkan nilai dari data kapal Message Type. Pada sub
program difungsikan untuk melakukan konversi data biner menjadi data
decimal dengan panjang karakter yang diambil adalah 6 yang dimulai dari bit ke 0.
Case Structure untuk menghasilkan data kapal Repeat Indicator terdapat pada
Gambar 3.12
Gambar 3.12 Case Structure program Repeat Indicator
22
Repeat Indicator ini memiliki panjang karakter sebanyak 2 bit yang dimulai dati bit
ke 6 sehingga untuk mendapatkan nilai dari data kapal Repeat Indicator maka data biner yang diambil adalah bit 6 dan 7. Yang ke tiga adalah data MMSI kapal dengan panjang 30 bit dimulai dari bit ke 8 yang ditunjukkan pada Gambar 3.13.
Gambar 3.13 Case Structure Program MMSI
MMSI dimulai dari bit ke 8 sampai bit ke 37, jadi sebanyak 30 bit dikonversi menjadi bilangan decimal. Karena pada sub program Deco/Decoding sudah dilakukan proses konversi maka pada program utama pada sebelah kiri data MMSI langsung di koneksikan ke output tanpa proses dengan program yang terdapat pada
sub program decoding adalah Gambar 3.13 bagian kanan. Data nomor 4
adalah Navigation Status yang diawali dari bit ke 38 yang ditunjukkan pada Gambar 3.14.
Gambar 3.14 Case Structure Program Navigation Status
Navigation status merupakan data kapal yang menunjukkan Aktivitas dari kapal, dimana nilainya diperoleh dari bit ke 38 sampai bit ke 41 seperti yang ditunjukkan pada Gambar 3.14. Data kapal yang ke lima adalah Rate of Turn yang memiliki panjang 8bit dan dimulai dari bit ke 42 seperti ditunjukkan pada Gambar 3.15.
23 Gambar 3.15 Case Structure Program Rate of Turn
Untuk menghasilkan data Rate of Turn maka dari 8 bit tersebut di ubah menjadi desimal kemudian hasil data decimal dibandingkan dengan 128 dan apabila nilai melebihi 128 maka nilai tersebut akan dikurangi dengan 256 yang dimaksudkan sebagai arah putaran kapal. Selanjutnya data kapal ke 6 adalah Speed Oveer
Ground dengan program LabVIEW nya pada Gambar 3.16.
Gambar 3.16 Case Structure Program Speed Over Ground
Data kapal Speed Over Ground merupakan data kecepatan kapal yang didapatkan dari bit ke 50 sampai ke 59 dengan panjang 10 bit. Dati 10 bit tersebut dionversi ke decsimal sehingga didapatkan nilai 2600 yang kemudian dibagi 10, maka dihasilkan nilai SOG 260. Data kapal yang ke 7 adalah Accuracy terdiri dari 1 bit yang ditunjukkan pad Gambar 3.17.
Gambar 3.17 Case Structure Program Accuracy
Accuracy data ini nilainya didapat dari konversi dengan panjang 1bit yang dimulai dari bit ke 60, sehingga nilai yang didapatkan hanya 1 atau 0 saja. Data kapal posisi didapatkan dari dua nilai yaitu Longitude dan Latitude dimana program keduanya dapat dilihat pada Gambar 3.18.
24 Gambar 3.18 Case Structure Program longitude dan latitude
Longitude dan latitude merupakan koordinat kapal berdasarkan map sehingga
nantinya dapat dilakukan ploting ke google maps. Untuk koordinat longitude dimulai dari bit ke 61 dengan panjang data 28 bit sedangkan koordinat latitude dimulai dari bit ke 89 dengan panjang data 27 bit. Setelah dilakukan konversi dari biner ke desimal selanjutnya nilai tersebut dibagi dengan 600000 pada nilai output konversi longitude dan latitude. Data kapal selanjutnya adalah Course Over
Ground yang dimulai dari bit ke 116 dengan program LabVIEW pada Gambar
3.19.
Gambar 3.19 Case Structure Program True Heading
True Heading ini merupakan derajat putar dari kapal sehingga untuk mendapatkan nilai tersebut harus mengonversi data biner 12 bit dati bit ke 116 sampai bit ke 127. Data kapal yang ke 12 adalah Timestamp ini merupakan satuan waktu (detik) untuk melakukan pengiriman pesan. Program LabVIEW untuk data Timestamp ini dapat dilihat pada Gambar 3.20.
25 Nilai dari data Timestamp diambil dari bit ke 137 sampai bit ke 142 dengan panjang 6 bit. Dengan menggunakan data ini kita dapat mengetahui intensitas pengiriman pesan pada setiap kapal. Selanjutnya data kapal yang ke 13 adalah
Maneuver Indicator yang ditunjukkan pada Gambar 3.21.
Gambar 3.21 Case Structure Program Maneuver Indicator
Terdiri dari 2 bit yang dimulai dari bit ke 143 maka nilai yang disediakan oleh AIS
Protocol Decoding dari 0 sampai 2 dimana 0 adalah Not Available, 1 adalah No special maneuver dan 2 adalah special maneuver. Spare ini merupakan data kapal
nomor 14 dan program LabVIEW nya ditunjukkan pada Gambar 3.22.
Gambar 3.22 Case Structure Program Spare
Program Spare ini terdiri dari 3 bit yang dimulai dari bit 145 dan berakhir pada bit ke 147. Seperti pada program Case structur yang lain untuk mendapatkan nilai spare maka dilakukan konversi dari biner ke desimal. RAIM Flag merupakan data kapal yang ke 15 dengan program LabVIEW dapat dilihat pada Gambar 3.23.
26 RAIM Flag merupakan perangkat receiver yang digunakan untuk pemantauan integrasi otomatis kapal. Bila terpasang maka nilai yang muncul adalah 1 dan apabila tidak terpasang maka nilainya adalah 0. Data terakhir kapal adalah Radio
Station yang diperoleh dengan program LabVIEW pada Gambar 3.24.
Gambar 3.24 Case Structure Program Radio Status
Bit 149 sampai bit 167 merupakan informasi diagnostic untuk system radio yang nilainya didapat dari konversi 19 bit ke desimal dengan metode Most Significant
Bit (MSB) yang dibaca nilai bitnya dari sebelah kiri. Hasil dari 16 data kapal
tersebut kemudian ditampilkan ke Front Panel program LabVIEW sehingga dapat dibaca oleh user yang ditunjukkan pada Gambar 3.25.
Gambar 3.25 Front Panel Decode LabVIEW
Sementara Penampilan keseluruhan dari program untuk penyimpanan data AIS dan proses decode ditampilkan pada Gambar 3.26
27
Gambar 3.26 Penyimpanan data AIS Software AIS Receiver
Gambar 3.27 Database AIS Sebelum di Decode
Pada Gambar 3.26 dan Gambar 3.27 di atas merupakan software AIS receiver dengan bahasa pemprograman LabVIEW, dimana program ini akan menyimpan data AIS berupa data NMEA Message 0183 dan hasil dari decode data NMEA Message 0183 menjadi data kapal sesungguhnya yang kemudian akan di lakukan filter berdasarkan MMSI. Untuk diagram alir atau Flow chart program AIS receiver ini ditunjukkan pada Gambar 3.28 di bawah ini.
28 Start Port Setting Time Setting Menit/jam
Buat file .txt baru Input lokasi penyimpanan data Recording 1 menit ? Persiapan file .txt
Baca data AIS dari serial
YA Jam
Start Timer menit
Tuliskan data AIS, data hasil decode dan data
filter ke file .txt Decode data AIS
Filter data decode berdasarkan MMSI
Tampilkan 1 MMSI data AIS ke dalam
google map
Buat file .txt baru 1 Jam ? Persiapan file .txt
Baca data AIS dari serial
YA Start Timer Jam
Tuliskan data AIS, data hasil decode dan
data filter ke file .txt Decode data AIS
Filter data decode berdasarkan MMSI Tidak Tidak Menit Button Stop? Tidak Finish Tampilkan real-time MMSI Tampil kan 1 MMSI Tampil semiua real
Time
Tampilkan data Semua MMSI Real
time ke Google map Tampilkan 1 MMS data ke dalam google map Tampilkan real-time MMSI Tampil kan 1 MMSI Tampil semiua real
Time
Tampilkan data Semua MMSI Real
time ke Google map
YA
Gambar 3.28 Flow Chart Program LabVIEW
Proses program AIS Receiver ini berawal dari tombol start dimana program dimulai, setelah LabVIEW running maka software ini akan meminta Seting Port yang berupa koneksi serial dari hardware AIS receiver dengan software LabVIEW. Setelah
29 terkoneksi selanjutnya secara otomatis program LabVIEW memberikan tempat penyimpanan data recording yang berupa data NMEA Message 0183. Penentuan lama pengambilan data dilakukan setelah proses dari penyimpanan data recording. Pilihan lama waktu penyimpanan ada dua macam yaitu penyimpanan data selama 1 menit atau penyimpanan data selama 1 jam. Untuk proses pemilihan lamanya penyimpanan waktu ini antara jam dan menit ini sama, yang membedakan adalah lama waktu penyimpanannya saja. Setelah dilakukan pemilihan lama penyimpanan data, maka timer mulai menghitung, yang kemudian diikuti dengan persiapan file penyimpanan data NMEA Message 0183. Pembacaan data NMEA Message 0183 melalui komunikasi serial ini adalah proses awal disimpannya data recording sebelum dilakukan decode data NMEA Message 0183 dan dilakukannya filter berdasarkan data MMSI dari data hasil
decode tersebut. Setelah proses filter data berdasarkan MMSI maka selanjutnya data
NMEA Message 0183, data decode dan data hasil filter MMSI akan ditampilkan ke layar
front panel pada LabVIEW, yang secara berurutan ketiga data .txt tersebut di simpan di
tempat yang telah disediakan LabVIEW. Bila Proses tersebut telah berjalan selama waktu yang telah dipilih sebelumnya, maka dibuat file.txt baru sebagai penyimpanan data NMEA Message 0183 yang baru juga. Tetapi apa bila lama waktu penyimpanan belum terpenuhi maka proses di atas akan dilakukan kembali hingga lama waktu penyimpanan terpenuhi. Untuk mengakhiri proses ini yang sekaligus mematikan fungsi dari semua proses adalah ketika ditekan tombol stop.
Proses decode dilakukan Software AIS decode yang dirancang untuk merubah data mentah (raw data) AIS dalam bentuk NMEA message 0183 menjadi data kapal sesuai standar ITU Recommendation M.1371 meliputi data MMSI, status navigasi, Rate
of Turn (ROT), kecepatan kapal, posisi kapal (Longitude dan Latitude), Course Over Ground (COG), True Heading (HDG), Time Stamp, RAIM flag dan Radio status.
30 (b)
Gambar 3.29 Data Hasil AIS decode dengan LabVIEW (a) Database Hasil Decode (b) Gambar 3.29(a) dan 3.29(b) diatas adalah hasil dari proses AIS decode dimana akan diperoleh data kapal berupa MMSI, status navigasi, Rate of Turn (ROT), kecepatan kapal, posisi kapal (Longitude dan Latitude), Course Over Ground (COG), True Heading (HDG), Time Stamp, RAIM flag dan Radio status.
Proses selanjutnya adalah pengiriman data MMSI, longitude dan latitude dari kapal yang telah diterima yang kemudian dilakukan marger atau plot ke google maps sehingga semua kapal yang diterima akan muncul sesuai kordinat longitude dan latitude yang terdapat di google maps. Menggunakan program javascript untuk mengambil data yang dikirim oleh labVIEW yang kemudian javascript mengolah data tersebut untuk dilakukan plot atau marger ke google maps.
3.3 Lokasi Penelitian
Lokasi penelitian terbagi menjadi tiga yaitu:
1. Lokasi identifikasi yang masuk dalam data AIS adalah kapal-kapal yang berada di Selat Singapura dan Perairan Batam bagian utara.
2. Lokasi AIS station sebagai tempat pemasangan peralatan AIS berupa antena, AIS receiver dan mini PC sebagai penyimpan data mentah (raw data) AIS, terbagi menjadi dua lokasi berbeda, yaitu :
a) AIS station 1 berada dikampus Politeknik Negeri Batam.
b) AIS station 2 berada dipulau Belakang Padang, salah satu pulau terluar yang berbatasan langsung dengan Singapura.
31 3. Lokasi AIS server berada di kampus Politeknik Negeri Batam
Gambar 3.30 Lokasi Penelitian dan Lokasi AIS Station 3.4 Pengambilan Data
Sistem pengoperasian AIS dalam penelitian ini dijalankan secara terintegrasi dan berjalan secara otomatis dimulai dari proses menerima data, mengolah, menyimpan dan menampilkan data AIS. AIS mampu merekam data kapal secara real-time yang dikirim setiap 2 hingga 10 detik tergantung dari kecepatan kapal pada saat kapal berlayar [4, 5]. Oleh karena itu, proses pengambilan data AIS pada penelitian ini akan dilakukan sepanjang waktu. Pengolahan data AIS agar didapat jumlah kapal yang melewati Selat Singapura dan Perairan Batam adalah dengan melakukan filter data jumlah MMSI hasil decode berdasarkan waktu perekaman.
Gambar 3.31 Pengolahan data Kepadatan Lalu Lintas Kapal Menggunakan AIS
32 BAB IV
HASIL DAN ANALISA
Pada bab ini dipaparkan mengenai pengujian-pengujian dan analisa-analisa yang berhubungan dengan penelitian.
4.1 Hasil Data Decode dan Data AIS (NMEA Message)
Data disimpan pada system ini adalah data AIS (NMEA message) dan data NMEA
message yang telah di decode menjadi data kapal MMSI, status navigasi, Rate of Turn
(ROT), kecepatan kapal, posisi kapal (Longitude dan Latitude), Course Over Ground (COG), True Heading (HDG), Time Stamp, RAIM flag dan Radio status. Hasil data kapal tersebut terdapat dalam sub VI seperti pada Gambar 4.1.
33 4.2 Pengujian Koordinat Kapal
Pengujian koordinat ini merupakan pengujian longitude dan latitude dari posisi kapal yang dideteksi. Pengujian ini membandingkan hasil system kami buat dengan google
maps dan juga marine traffic. Metode pengambilan dan perbandingan data yang
diperoleh ini dimulai dari pengambilan data system berupa data MMSI, longitude dan
latitude yang kemudian di plot kedalam google maps dan untuk membandingkan
kebenaran atau tingkat keakurasian data yang diperoleh maka data hasil yang diperoleh dibandingkan dengan data pembanding (koordinat) pada marne traffic. Sebanyak 20 data diambil dan di bandingkan dengan data pembanding marine traffic dan hasilnya dari perbandingan tersebut terdapat pada Tabel 4.1.
Tabel 4.1 Tabel hasil perbandingan data percobaan dengan data marine traffic
NO MMSI Koordinat Sistem Penelitian Koordinat Marine Traffic Error (%) Latitude Longitude Latitude Longitude
1 538005739 1.31 104.07 1.3059 104.068 0.61% 2 636016694 1.26 103.92 1.26 103.918 0.20% 3 563036130 1.35 104.06 1.355 104.0627 0.77% 4 566676000 1.24 103.8 1.2443 103.8027 0.70% 5 477390800 1.29 103.95 1.2924 103.945 0.26% 6 565897000 1.25 103.76 1.2443 103.771 0.53% 7 357285000 1.23 103.8 1.229 103.8 0.10% 8 477007100 1.27 103.78 1.267 103.78 0.30% 9 413135000 1.28 103.93 1.285 103.932 0.70% 10 538005881 1.27 103.9 1.268 103.9 0.20% 11 371714000 1.27 103.77 1.272 103.771 0.30% 12 220263000 1.27 103.77 1.2715 103.7734 0.49% 13 305519000 1.27 103.87 1.265 103.87 0.50% 14 566120000 1.3 103.96 1.298 103.961 0.10% 15 533836000 1.32 104.11 1.329 104.1 0.10% 16 567051900 1.23 103.8 1.234 103.796 0.00% 17 636014298 1.3 104.08 1.296 104.076 0.80% 18 305610000 1.43 103.91 1.433 103.908 0.10% 19 566592000 1.3 103.95 1.2987 103.9495 0.18% 20 538005440 1.39 103.96 1.392 103.949 0.90% Rata-rata Error 0.39%
Dari hasil Tabel 4.1 diatas maka dapat diketahui nilai error yang didapatkan dengan rumus di bawah ini:
Error= ((nilai latitude percobaan- nilai latitude marine traffic) + (nilai longitude percobaan- nilai longitude marine traffic)) 100
34 Dibagi dengan 100 ini untuk menjadikan nilai dalam bentuk % error dan untuk rata-rata error nya di dapatkan dengan menjumlahkan semua error kemudian dibagi dengan jumlah data yang diperoleh. Maka tingkat error yang didapat dari penelitian ini adalah 0.39% dengan begitu keakurasian dari penelitian ini adalah 99.61%. Perbandingan koordinat tersebut bila dilihat dari visual google maps dengan marine traffic dapat kita lihat pada Gambar 4.2.
Gambar 4.2 Tampilan Software Marine Traffic
Gambar 4.3 Tampilan Software LabVIEW
Untuk mengetahui titik koordiat pada marine traffic maka dikopikan MMSI ke bagian
search map dan kemudian data base pada marine traffic membaca dan menunjukkan
koordiat kapal dengan MMSI tujuan sehingga pada Gambar sebelah kiri akan muncul identitas kapal dan koordinat kapal. Pada bagian kanan Gambar 4.2 adalah google map system untuk melakukan ploting kapal dengan identitas MMSI, latitude dan longitude. Jadi untuk memunculkan koordian pada google maps maka diperlukan identitas kapal
35 yang berupa MMSI, latitude dan longitude kemudian tombol update data untuk melakukan ploting ke google maps dan reset untuk menghilangkan ploting pada google
36 BAB V
KESIMPULAN DAN SARAN 5.1 Kesimpulan
Berdasarkan analisis dan pembahasan maka dapat disimpulkan sebagai berikut
1. Data AIS (NMEA message) dapat didecode dengan menggunakan software LabVIEW menjadi data kapal berupa MMSI, status navigasi, Rate of Turn (ROT), kecepatan kapal, posisi kapal (Longitude dan Latitude), Course Over
Ground (COG), True Heading (HDG), Time Stamp, RAIM flag dan Radio status.
2. Dengan menggunakan AIS receiver sebagai penerima data dari kapal dengan alat bantu antena vertical sebagai penerima frekuensi dan mini PC sebagai alat
recorder data yang didalamnya terdapat software LabVIEW untuk melakukan decode, merupakan instalasi system penelitian ini.
3. Dengan mengetahui posisi kapal dengan melakukan ploting koordinat kapal pada
google maps maka dapat diketahui posisi kapal secara visual secara real-time di
perbatasan Selat Singapura dan Perairan Batam dengan akurasi 99.61%.
5.2 Saran
1. Perlu dilakukan perluasan jangkauan dengan memperbanyak pemasangan AIS
receiver agar monitoring kapal jangkauan wilayahnya semakin besar.
2. Program pada LabVIEW perlu dilakukan pengembangan agar data yang diambil tidak terbatas pada tipe data A saja dan dapat men-decode tipe B dan tipe 5,6 dan 7.
37 DAFTAR PUSTAKA
[1] Tridoyo Kusumastanto. 2013. Pemberdayaan Sumberdaya Kelautan, Perikanan
dan Perhubungan Laut dalam Abad XXI.
[2] Mihmanli, Ege. 2011. Research Report : Combating Piracy in the Strait of
Malacca. MUNDP 2011 – Asia and the Pacific.
[3] Hendra Saputra, Adi Maimum, Jaswar Koto, Mohammad Danil Arifin. 2013.
Estimation and Distribution of Exhaust Ship Emission from Marine Traffic In the Straits Of Malacca and Singapore Using Automatic Identification System (AIS) Data. The 8th International Conference on Numerical Analysis in Engineering, pp. 131-142, pekanbaru, Indonesia.
[4] International Telecommunication Union, ITU-R Recommendation M.1371-2. 2006.
Technical Characteristic for a universal ship borne automatic identification system using time division multiple access in the VHF maritime mobile band.
[5] Kojiro Hata, Kazuhiko Hasegawa, Kazuhisa Niwa, Hiroyuki Fukuda. 2006. AIS
Simulator and ITS Application.
[6] Intenational Maritime Regulataion (IMO) Resolution A.917(22). 2001. Guidelines
For The Onboard Operational Use Of Shipborne Automatic Identification Systems (AIS).
[7] Harini, Sasono Wibowo.2014. Automatic Identification System (AIS) Sebagai Alat
Bantu Pendeteksi Lokasi Kapal. Jurnal Sains dan Teknologi Maritim, Volume XIII
No. 02 Maret 2014.
[8] MB Zaman, E Kobayashi, N Wakabayashi, S Khanfir, T Pitana, A Maimun. 2012.
Fuzzy FMEA model for risk evaluation of ship collisions in the Malacca Strait: based on AIS data. Journal of Simulation 8 (1), 91-104 (2014)
[9] MB Zaman, E Kobayashi, N Wakabayashi, T Pitana, A Maimun. 2013.
Implementation of Automatic Identification System (AIS) for Evaluation of Marine Traffic Safety in Strait of Malacca using Analytic Hierarchy Process (AHP).
Journal of Japan Society of Naval Architects and Ocean Engineers 16, 141-153 [10] MB Zaman, A Santoso, E Kobayashi, D Wakabayashi, A Maimun. 2015. Formal
Safety Assessment (FSA) for Analysis of Ship Collision Using AIS Data. TransNav:
International Journal on Marine Navigation and Safety of Sea.
[11] Perez, M., Chang, R., Billings, R., Kosub, T.L.,. 2009. Automatic Identification System (AIS) data use in marine vessel emission estimation. 18th Annual International Emission Inventory Conference.
[12] Zheng Pan, Shujun Deng. 2009. Vessel Real-Time Monitoring System Based On
AIS Temporal Data. ICIII '09 Proceedings of the 2009 International Conference on
38 Volume 03. Page 611-614. IEEE Computer Society Washington, DC, USA ©2009 ISBN: 978-0-7695-3876-1 doi>10.1109/ICIII.2009.458
[13] Pitana, Trika., Kobayashi, Eiichi., Wakabayashi, Nobukazu. 2010. Estimation of Exhaust Emissions of Marine Traffic Using Automatic Identification System Data (Case Study: Madura Strait Area, Indonesia). OCEANS 2010 IEEE – Sydney, E-ISBN : 978-1-4244-5222-4, Print E-ISBN: 978-1-4244-5221-7.
[14] Eriksen, T., Skauen, A., Narheim. B., Helleren, Ø., Olsen, Ø., Olsen, R., 2010.
Tracking ship traffic with space-based AIS: experience gained in first months of operations. Proceedings of the Waterside Security Conference, Marina di Carrara,
Italy. doi: 10.1109/WSSC.2010.5730241. Elsevier
[15] Skauen, A N. 2015. Quantifying the tracking capability of space-based AIS systems. Advances in Space Research, Volume 57, Issue 2, 15 January 2016, Pages 527–542
[16] LAPAN (Lembaga Penerbangan dan Antariksa Nasional). 2010. Sistem
Pengoperasian AIS pada satelit LAPAN-Ekuatorial untuk Pemantauan Kapal di Wilayah Indonesia. Laporan Akhir RIK DIKTI 2010
[17] Lucialli, P., Ugolini, P., Pollini, E.. 2007. Harbur of Ravenna: The
Contribution of Harbour Traffic to Air Quality. Atmos. Environ., vol. 41, pp.
6421-6431, 2007.
[18] Meyer, D.P., Maes, F., Volckaert, A.. 2007. Emission from international shipping
in the Belgian part of the North sea and the Belgian seaports. J
Atmos.Environ., vol 42, pp. 196-206, 2007.
[19] Eyring, Veronika.,S.A.Isaksen, Ivar., Berntsen, Terje., J. Collins, William., et al. 2010. Transport impacts on atmosphere and climate: Shipping. Atmospheric Environment 44 (2010) 4735 – 4771.
39 Lampiran 1 Contoh Data AIS (NMEA message) dan Hasil AIS Decode Dengan
Marine Traffic
Hasil decode
Setelah didecode akan didapat informasi kapal dan posisi kapal (contoh software AIS decode untuk single data)
40 Lampiran 2 Program LabVIEW
41 Sub VI Random data
42 Sub VI Filter MMSI
43 Sub VI Creat First File
44 Sub VI Creat Time
![Tabel 2.1 Informasi Data AIS [6]](https://thumb-ap.123doks.com/thumbv2/123dok/4806142.3448549/18.892.209.717.219.667/tabel-informasi-data-ais.webp)
![Tabel 2.4 AIS Decode Message [4]](https://thumb-ap.123doks.com/thumbv2/123dok/4806142.3448549/20.892.225.702.764.1131/tabel-ais-decode-message.webp)