Implementasi Mikrokontroler Atmega8535 Berbasis Sensor Ultrasonik Untuk Proteksi
Keamanan Terpadu
Ricky Ardi Yosua Sidauruk1, S.N.M.P Simamora2, Marlindia Ike Sari3
1,2,3
Program Studi Teknik Komputer, Politeknik Telkom
[email protected] [email protected],[email protected]
Abstrak
Penelitian dimulai dari pemikiran betapa pentingnya keamanan pada saat seperti ini. Terutama yang dibutuhkan saat ini adalah alat keamanan yang efektif dan efisien. Maka dari itu disini akan dicoba membangun alat atau penelitian berupa Implementasi Mikrokontroler 8535 berbasis Sensor Ultrasonik untuk Proteksi Keamanan Terpadu. Adapun metode yang dilakukan untuk membangun alat ini antara lain, yang pertama adalah dicoba dilakukan daerah mana yang paling penting untuk diproteksi. Langkah selanjutnya adalah menentukan daerah yang diproteksi, disini daerah yang akan diproteksi adalah pintu rumah atau ruangan, selanjutnya dilakukan pemilihan alat dan metode perancangan yang tepat dan sesuai dengan asumsi dari daerah yang telah ditentukan. Setelah pemilihan alat dan perancangan system telah selesai dilakukan, langkah selanjutnya adalah pembangunan alat. Alat keamanan ruangan ini menggunakan Mikrokontroler 8535, sensor ultrasonic, dan Buzzer sebagai sumber bunyi (alarm). Dan daerah yang akan diproteksi adalah sejauh <=30cm, jika sensor mendeteksi ada penghalang pada jarak tersebut maka sensor akan mengirim sinyal ke mikrokontroler dan mikrokontroler akan menyalakan buzzer dan sensor menghentikan propagasi sinyal.
Kata Kunci : efektif, proteksi, jarak, mikrokontroler, sensor ultrasonic, buzzer
Abstract
This Research starts from thinking how important security at a time like this. Especially needed now is a security tool that effectively and efficiently. Therefore here will try to build a tool or a research-based Implementation of Microcontroller ATMega 8535 Ultrasonic Sensor for Integrated Security Protection. The method in place to build this tool, among others, the first is trying to do which is the most important areas to be protected. The next step is to determine the protected area, area to be protected here is the door of a house or room, then performed the selection of tools and design methods are appropriate and in accordance with the assumption of a predetermined area. After the selection of equipment and system design has been completed, the next step is the development tool. This room is a security tool using Microcontroller ATMega 8535, ultrasonic sensors, and the buzzer as the sound source (alarm). And the area to be protected is the extent <= 30cm, if the sensor detects the obstacle at a distance of the sensor will send a signal to the microcontroller and the microcontroller will turn on the buzzer and stop the propagation of sensor signals.
Keywords: effective, protection, range, microcontroller, ultrasonic sensors, buzzer
1. Pendahuluan
Semakin tingginya tingkat kejahatan saat ini
terutama pencurian dan perampokan semakin
membuat kekhawatiran masyarakat saat ini.
Apalagi kasus yang semakin marak saat ini yaitu, pencurian di saat rumah sedang ditinggalkan atau dalam keadaan kosong. Penggunaan teknologi
memang harus sepatutnya digunakan untuk
mengatasi masalah-masalah semacam ini. Memang sudah banyak alat-alat teknologi yang sudah digunakan saat ini, tapi masih banyak yang belum efisien dan efektif. Untuk mengatasi masalah
tersebut, penelitian ini akan membahas
Implementasi Mikrokontroler ATMega8535
berbasis Sensor Ultrasonik untuk Proteksi
Keamanan Terpadu.
Perkembangan teknologi telah maju dengan pesat dalam perkembangan dunia elektronika, khususnya dalam perkembangan dunia elektronika, khususnya
dunia mikroelektronika. Penemuan silicon
menyebabkan bidang ini mampu memberikan
sumbangan yang amat berharga bagi
perkembangan teknologi modern. Dalam
pengembangan terakhir, yaitu generasi AVR
(Advance Versatile RISC processor), para desainer sistem elektronika telah diberi suatu teknologi yang memiliki suatu kapabilitas yang amat maju, tetapi dengan biaya ekonomis yang cukup minimal[6]
Dalam penelitian ini, bertujuan untuk
mengintegrasikan mikrokontroler ATMEGA8535 dengan sensor dan speaker
2. Sensor
Sensor adalah device atau komponen
elektronika yang digunakan untuk mengubah
besaran fisik menjadi besaran listrik sehingga bisa dianalisa dengan menggunakan rangkaian listrik. Sebagai contoh, sensor cahaya adalah sensor yang cara kerjanya mengubah besaran cahaya menjadi besaran listrik [3].
2.1 Sensor Ultrasonik
Gelombang ultrasonik adalah gelombang
dengan besar frekuensi diatas frekuensi gelombang suara (speech signals) yaitu lebih dari 20 KHz[7]. Seperti telah disebutkan bahwa sensor ultrasonik terdiri dari rangkaian pemancar ultrasonik yang
disebut transmitter dan rangkaian penerima
ultrasonik yang disebut receiver. Sinyal ultrasonik
yang dibangkitkan akan dipancarkan dari
transmitter ultrasonik. Ketika sinyal mengenai
benda penghalang, maka sinyal ini dipantulkan, dan diterima oleh receiver ultrasonik. Sinyal yang diterima oleh rangkaian receiver dikirimkan ke rangkaian mikrokontroler untuk selanjutnya diolah
untuk menghitung jarak terhadap benda di
depannya (bidang pantul)[3].
Prinsip kerja dari sensor ultrasonik dapat
ditunjukkan dalam gambar dibawah ini :
Pemancar Ultrasonik Penerima Ultrasonik Sinyal Ultrasonik Penghalang
Gambar .1 Prinsip Kerja Sensor Ultrasonik
Prinsip kerja dari sensor ultrasonik adalah sebagai berikut :
1. Sinyal dipancarkan oleh pemancar ultrasonik.
Sinyal tersebut berfrekuensi diatas 20kHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40kHz. Sinyal tersebut di
bangkitkan oleh rangkaian pemancar
ultrasonik.
2. Sinyal yang dipancarkan tersebut kemudian
akan merambat sebagai sinyal/ gelombang bunyi dengan kecepatan bunyi yang berkisar 340 m/s. Sinyal tersebut kemudian akan
dipantulkan dan akan diterima kembali oleh bagian penerima Ultrasonik.
3. Setelah sinyal tersebut sampai di penerima
ultrasonik, kemudian sinyal tersebut akan diproses untuk menghitung jaraknya. Jarak dihitung berdasarkan rumus :
S = 340.t/2 (2)
dimana S adalah jarak antara sensor ultrasonik dengan bidang pantul, dan t adalah selisih waktu antara pemancaran gelombang ultrasonik sampai diterima kembali oleh bagian penerima ultrasonik.
a. Pemancar Ultrasonik (Transmitter)
Pemancar Ultrasonik ini berupa rangkaian yang memancarkan sinyal sinusoidal berfrekuensi di atas
20 KHz menggunakan sebuah transducer
transmitter ultrasonik. 40kHz R3 3kOhm D1 D2 T1 T2 R4 R6 Transmiter
Gambar 2 Rangkaian Pemancar Gelombang Ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut :
1. Sinyal 40 KHz dibangkitkan melalui
mikrokontroler.
2. Sinyal tersebut dilewatkan pada sebuah
resistor sebesar 3kOhm untuk pengaman
ketika sinyal tersebut membias maju
rangkaian dioda dan transistor.
3. Kemudian sinyal tersebut dimasukkan ke
rangkaian penguat arus yang merupakan kombinasi dari 2 buah dioda dan 2 buah transistor.
4. Ketika sinyal dari masukan berlogika
tinggi (+5V) maka arus akan melewati dioda D1 (D1 on), kemudian arus tersebut akan membias transistor T1, sehingga arus yang akan mengalir pada kolektotr T1 akan besar sesuai dari penguatan dari transistor.
5. Ketika sinyal dari masukan berlogika
rendah (0V) maka arus akan melewati dioda D2 (D2 on), kemudian arus tersebut akan membias transistor T2, sehingga arus yang akan mengalir pada kolektotr T2
akan besar sesuai dari penguatan dari transistor.
6. Resistor R4 dan R6 berfungsi untuk
membagi tengangan menjadi 2,5 V.
Sehingga pemancar ultrasonik akan
menerima tegangan bolak – balik dengan Vpeak-peak adalah 5V (+2,5 V s.d -2,5 V).
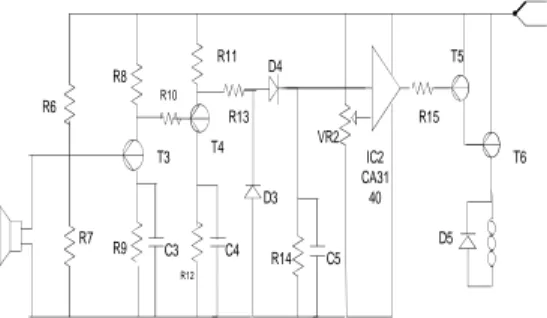
b. Penerima Ultrasonik (Receiver)
Penerima Ultrasonik ini akan menerima sinyal
ultrasonik yang dipancarkan oleh pemancar
ultrasonik dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaian band pass filter (penyaring pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan. Kemudian sinyal keluarannya akan dikuatkan dan dilewatkan ke rangkaian komparator
(pembanding) dengan tegangan referensi
ditentukan berdasarkan tegangan keluaran penguat pada saat jarak antara sensor kendaraan mini dengan sekat/dinding pembatas mencapai jarak minimum untuk berbelok arah. Dapat dianggap keluaran komparator pada kondisi ini adalah high (logika ‘1’) sedangkan jarak yang lebih jauh adalah
low (logika’0’). Logika-logika biner ini kemudian
diteruskan ke rangkaian pengendali
(mikrokontroler). Receiver R6 R7 R8 R9 R10 R11 R13 R14 R15 T3 T4 T5 T6 R12 C3 C4 C5 D3 D4 D5 VR2 IC2 CA31 40 +9V DC
Gambar 3 Rangkaian Penerima Gelombang Ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut :
1. Pertama – tama sinyal yang diterima akan
dikuatkan terlebih dahulu oleh rangkaian transistor penguat Q2.
2. Kemudian sinyal tersebut akan di-filter
menggunakan High Pass Filter pada
frekuensi > 40kHz oleh rangkaian
transistor Q1.
3. Setelah sinyal tersebut dikuatkan dan
di-filter, kemudian sinyal tersebut akan
di’searah’kan oleh rangkaian dioda D1 dan D2.
4. Kemudian sinyal tersebut melalui
rangkaian filter low pass filter pada frekuensi < 40KHz melalui rangkaian
filter C4 dan R4.
5. Setelah itu sinyal akan melalui komparator
Op-Amp pada U3.
6. Jadi ketika ada sinyal ultrasonik yang
masuk ke rangkaian, maka pada
komparator akan mengeluarkan logika rendah (0V) yang kemudian akan diproses oleh mikrokontroler untuk menghitung jaraknya.
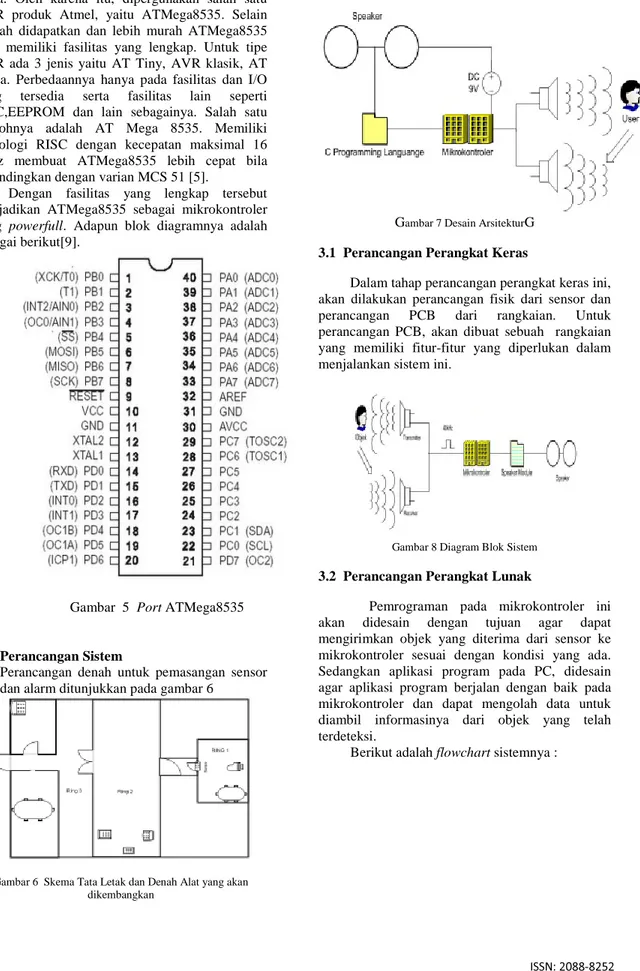
2.2 Mikrokontroler AVR ATMega8535
Gambar.4 Mikrokontroler AVR ATMega8535
Mikrokontroler adalah suatu keping IC
dimana terdapat mikroprosesor dan memori
program (disebut: ROM) serta memori serba-guna
(disebut: RAM), bahkan ada beberapa jenis
mikrokontroler yang memiliki fasilitas ADC, PLL,
EEPROM dalam satu kemasan. Penggunaan
mikrokontroler dalam bidang kontrol sangat luas dan popular [4].
Ada beberapa vendor yang membuat
mikrokontroler diantaranya Intel, Microchip,
Winbond, Atmel, Philips, Xemics dan lain - lain. Dari beberapa vendor tersebut, yang paling populer digunakan adalah mikrokontroler buatan Atmel. Mikrokontroler AVR (Advance Versatile RISC
processor) memiliki arsitektur RISC 8 bit, di mana
semua instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS 51 yang membutuhkan 12 siklus
clock. Tentu saja itu terjadi karena kedua jenis
mikrokontroler tersebut memiliki arsitektur yang
berbeda. AVR berteknologi RISC (Reduced
Instruction Set Computing), sedangkan seri MCS
51 berteknologi CISC (Complex Instruction Set
Computing). Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing – masing kelas adalah memori, peripheral,
dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama. Oleh karena itu, dipergunakan salah satu AVR produk Atmel, yaitu ATMega8535. Selain mudah didapatkan dan lebih murah ATMega8535 juga memiliki fasilitas yang lengkap. Untuk tipe AVR ada 3 jenis yaitu AT Tiny, AVR klasik, AT Mega. Perbedaannya hanya pada fasilitas dan I/O
yang tersedia serta fasilitas lain seperti
ADC,EEPROM dan lain sebagainya. Salah satu
contohnya adalah AT Mega 8535. Memiliki
teknologi RISC dengan kecepatan maksimal 16 MHz membuat ATMega8535 lebih cepat bila dibandingkan dengan varian MCS 51 [5].
Dengan fasilitas yang lengkap tersebut
menjadikan ATMega8535 sebagai mikrokontroler yang powerfull. Adapun blok diagramnya adalah sebagai berikut[9].
Gambar 5 Port ATMega8535
3. Perancangan Sistem
Perancangan denah untuk pemasangan sensor dan alarm ditunjukkan pada gambar 6
Gambar 6 Skema Tata Letak dan Denah Alat yang akan dikembangkan
Desain arsitektur dalam implementasi perangkat ditunjukkan pada gambar 7
Gambar 7 Desain ArsitekturG
3.1 Perancangan Perangkat Keras
Dalam tahap perancangan perangkat keras ini, akan dilakukan perancangan fisik dari sensor dan
perancangan PCB dari rangkaian. Untuk
perancangan PCB, akan dibuat sebuah rangkaian yang memiliki fitur-fitur yang diperlukan dalam menjalankan sistem ini.
Gambar 8 Diagram Blok Sistem
3.2 Perancangan Perangkat Lunak
Pemrograman pada mikrokontroler ini
akan didesain dengan tujuan agar dapat
mengirimkan objek yang diterima dari sensor ke mikrokontroler sesuai dengan kondisi yang ada. Sedangkan aplikasi program pada PC, didesain agar aplikasi program berjalan dengan baik pada mikrokontroler dan dapat mengolah data untuk
diambil informasinya dari objek yang telah
terdeteksi.
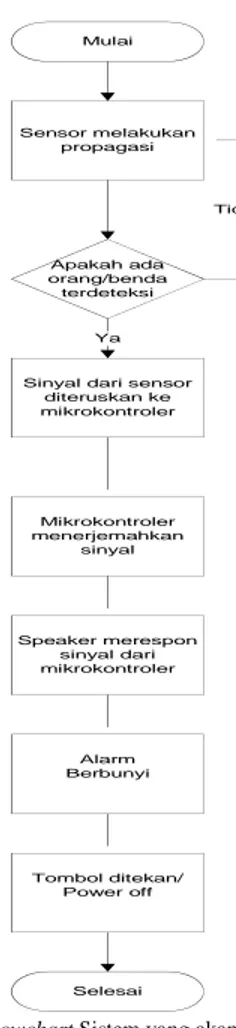
Gambar 9. Flowchart Sistem yang akan dikembangkan
4. Implementasi dan Pengujian 4.1 Implementasi
Gambar 9 Implementasi Hardware
Gambar 9 Implementasi Penempatan Hardware
4.2 Parameter Pengujian 4.2.1 Pengujian Sistem
Pengujian dari sistem pendeteksi keamanan
ruangan dilakukan pada beberapa aspek
diantaranya :
1. Sensor yang dipakai dapat berfungsi atau
tidak.
2. Mikrokontroler dapat menerima keluaran
berupa data logic dari sensor.
3. Interkoneksi antara mikrokontroler dengan
speaker-alarm direpresentasikan dengan bunyi alarm.
4. Tingkat jarak deteksi sensor sudah efisien.
4.3 Pengujian
Pengujian alat digunakan pada satu ruangan yang kondisi dan tata letak telah disesuaikan dengan kebutuhan system. Percobaan dilakukan dengan menggunakan parameter jarak dan kualitas dari alat yang digunakan baik itu sensor , mikrokontroler, dan Buzzer.
Penggunaan sensor merupakan hal yang utama yang wajib diuji pada alat ini, karena sensor merupakan alat pemantau utama. Pengujian pada sensor dilakukan dengan melibatkan parameter jarak dari benda yang akan dijadikan penghalang. Disini diharapkan sensor mampu memantau jarak deteksi yaitu <=30cm yang akan mengirim signal ke mikrokontroler dan hal di atas sudah dibuktikan pada table pengujian.
Pengujian pada mikrokontroler yang
bertugas menerima data logic dari sensor ultrasonic telah dilakukan dengan pengaktifan port dari Buzzer yang active high (aktif ketika menerima
data logic “1”) jika sensor mengirim hasil
pemantauan.
Pada 393table berikut dapat dilihat tingkat
pengukuran jarak yang efektif dari sensor
ultrasonic.
TABEL 1 TABEL PENGUJIAN
Jarak Banyak nya Percoba an (kali) Buzzer
Berbunyi (kali) Kualitas alat
<=30cm 30 30 Baik 31cm-34cm 30 1 Baik >35cm 30 0 Baik Mulai Sensor melakukan propagasi
Sinyal dari sensor diteruskan ke mikrokontroler Apakah ada orang/benda terdeteksi Mikrokontroler menerjemahkan sinyal Speaker merespon sinyal dari mikrokontroler Ya Tidak Selesai Tombol ditekan/ Power off Alarm Berbunyi
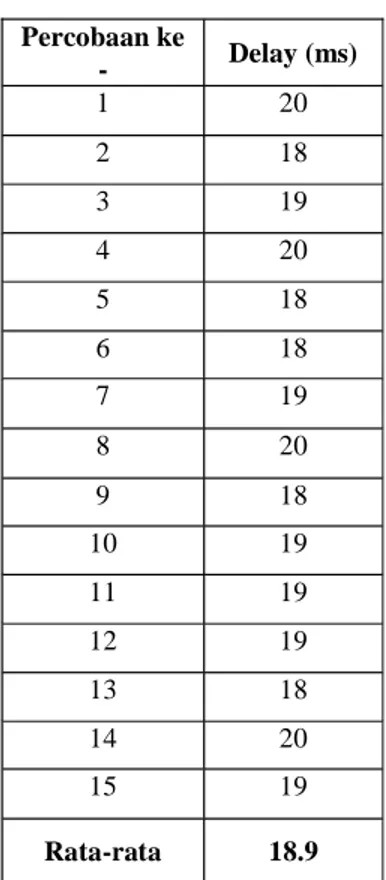
TABEL 2 TABEL SENSITIVITAS SENSOR Percobaan ke - Delay (ms) 1 20 2 18 3 19 4 20 5 18 6 18 7 19 8 20 9 18 10 19 11 19 12 19 13 18 14 20 15 19 Rata-rata 18.9
Sebelum melakukan proses perancangan dan implementasi, terlebih dahulu dipertimbangkan hal-hal yang berkaitan dengan hardware dan
software pada sistem pendeteksi. Pertimbangan
desain mengacu pada komponen utama yang
terdapat pada sistem pendeteksi. Adapun
komponen utama dari sistem pendeteksi adalah sensor ultrasonic PING, mikrokontroler beserta komponen-komponennya, buzzer dan baterai 9 volt sebagai sumber daya. Seperti sudah dijelaskan
sebelumnya tata letak sensor jangan sampai
salah,seperti adanya benda sejauh dari jarak yang akan dipantau.
Selain pertimbangan sensor, pemilihan mikrokontroler ATMega8535 dilakukan karena kapasitas memorinya yang cukup untuk program
ini yaitu 8Kbytes. Kapasitas memori perlu
disesuaikan agar memori tidak sia-sia.
ATMEGA 8535 mempunya fasilitas port Program dan serial. Geser switch Pgrm untuk
men-download program ke chip, atau geser ke Serial
untuk melakukan komunikasi serial ke komputer / piranti lain, melalui USB.
Untuk memberi output pada buzzer bisa melalui buzzer 9 volt yang disambungkan melalui
baterai cap ke mikrokontroler.
Selain pemilihan hardware, pemilihan bahasa pemrograman pun menjadi pertimbangan dalam perancangan sistem pendeteksi pencurian. Bahasa pemrograman C dipilih karena memiliki
kompatibilitas yang baik dengan windows.Selain itu, Bahasa C mudah dipahami oleh programmer
dibandingkan Bahasa Rakitan, untuk hal
pembangunan aplikasi berorientasi hardware.
3.5 Blok diagram dan Cara Kerja Alat
Disini akan dijelaskan mengenai cara kerja alat yang dimana alat akan disesuaikan posisinya dengan benar. Setelah alat diaktifkan dan diberi sumber daya yang cukup (9V) maka sensor akan melakukan propagasi sinyal ultrasonik secara
periodic.. Lalu jika kita member perintah jarak
yang dipantau adalah sejauh 30cm, maka setelah sensor menerima kembali sinyal ultrasonik maka mikrokontroler akan menghitung jarahnya dan jika jaraknya sudah <=30cm maka mikrokontroler akan mengaktikan pin dimana buzzer akan berbunyi, dan propagasi sinyal akan dihentikan.
Jelasnya dapat dilihat pada gambar di bawah :
Mikrokontroler
Sensor High 5uS
Mikrokontroler mengirim pulsa high selama 5 uS
40Khz
Sensor melakukan propagasi sinyal yang menghasilkan
pulsa yang dikirim ke mikrokokontroler Lau mikrokontroler mengolah
dan menghasilkan jarak Jarak sudah memenuhi, mikrokontroler mengirim logika high ke port buzzer Buzzer berbunyi
Gambar 10 Blok Diagram dan Kerja Alat
5. Kesimpulan
Berdasarkan proses implementasi, pengujian implementasi, dan analisis pada alat keamanan ini, dapat ditarik kesimpulan sebagai berikut :
1) Pengintegrasian alat antara modul
mikrokontroler, sensor ultrasonik dan buzzer telah berhasil dilakukan ditandainya dengan bekerjanya alat sesuai program yang telah dibuat menggunakan Bahasa Pemrograman C. 2) Pemanfaatan sensor ultrasonik sebagai alat
pemantau benda atau penghalang telah berhasil dilakukan.
3) Hasil pengujian menunjukkan semua alat
bekerja dengan baik dan efektif; dimana telah teruji pada parameter jarak.
4) Sensitivitas dari sensor ultrasonik mengirim data hasil pengamatan kepada mikrokontroler telah terukur dengan delay rata-rata 18,9ms.
Daftar Pustaka
[1] Andrianto, Heri. 2008. Pemrograman Mikrokontroler
AVR ATMega16 Menggunakan Bahasa C
(CodeVision AVR). Penerbit : Informatika. Bandung.
[2] Budiharto, Widodo, Firmansyah, Sigit. 2005.
Elektronika Digital + Mikroprosesor. Penerbit : Andi.
Yogyakarta.
[3] Hani, Slamet. 2010. Sensor Ultrasonik SRF05
Sebagai Memantau Kecepatan Kendaraan Bermotor.
Jurusan Teknik Elektro. IST AKPRIND Yogyakarta. Yogyakarta.
[4] Heryanto, Hari. 2008. Pemrograman Bahasa C untuk
Mikrokontroler ATMEGA8535. Penerbit : Andi.
Yogyakarta.
[5] Ketaren, Elimiananta. 2008. Rancang Bangun Sistem
Monitoring Objek Bergerak Dalam Ruangan
Menggunakan Sinar Laser via SMS Berbasis
Mikrokontroler ATMEGA8535.Universitas Diponegoro. Semarang
[6] Malik, M Ibnu. 2003. Belajar Mikrokontroler ATMEL
AT89S8252. Penerbit : Gava.Yogyakarta
[7] Prasetyo, Hanung N, Aziz, Heri Saeful,
Budiman, Gelar. 2009. Courseware Fisika. Politeknik TELKOM. Bandung.
[8] Tim Lab Mikroprosesor. 2007. Pemrograman
Mikrokontroler AT89S51 dengan C/C++ dan
Assembler. Penerbit : Andi. Yogyakarta
[9] Wardhana, Lingga. 2006. Belajar Sendiri
Mikrokontroler AVR Seri ATMEGA8535. Penerbit : Andi. Yogyakarta.
[10] Winoto, Ardi. 2008. Mikrokontroler AVT
ATMEGA8/32/16/8535 dan Pemrogramannya dengan Bahasa C pada WinAVR. Penerbit : Informatika.