BAB I
PENDAHULUAN
I.1. Latar belakangTeknologi foto udara saat ini sudah berkembang sangat pesat, yaitu dari analog menjadi digital. Hal itu merupakan upaya untuk mendapatkan gambaran permukaan bumi secara cepat, akurat dan efisien. Gambaran permukaan bumi yang diperoleh melalui pemotretan udara dipelajari secara mendalam dalam ilmu fotogrametri.
Menurut jenisnya, foto udara terbagi menjadi 2 jenis yaitu foto udara format metrik dan non metrik. Foto udara metrik merupakan foto udara yang diambil menggunakan kamera metrik dan memiliki ketelitian yang sangat tinggi karena dibuat untuk keperluan pemetaan. Jenis foto lainnya adalah foto non metrik yang dihasilkan dari kamera non metrik dan dibuat untuk pengambilan foto secara umum sehingga tidak memiliki ketelitian sebaik kamera metrik.
Gularso (2013) mengungkapkan bahwa jenis kamera dan wahana yang digunakan pada foto udara mempengaruhi efisiensi biaya untuk pemetaan. Pada luas area yang relatif lebih kecil (±100 ha) pemotretan menggunakan kamera metrik menjadi tidak optimal karena biaya operasional tidak sebanding dengan volume pekerjaan. Hal tersebut memacu para ahli fotogrametri untuk mengembangkan metode alternatif pemotretan dengan biaya relatif murah dan cukup akurat. Salah satu metode alternatif adalah penggunaan kamera non metrik berformat kecil sebagai instrumen pemotretan udara, metode ini dikenal dengan Small Format Aerial
Photography (SFAP).
Beberapa penelitian dan aplikasi mengenai foto udara format kecil telah dilaksanakan. Prijono dkk (2004) melakukan penelitian mengenai pemanfaatan foto udara format kecil untuk pendataan obyek pajak bumi dan bangunan. Penggunaan pesawat terbang dengan kamera format kecil (non metrik) merupakan salah satu metode alternatif di dalam pengambilan data rupa bumi melalui pemotretan udara.
Hasil penelitian tersebut membuktikan bahwa foto udara format kecil dapat dimanfaatkan untuk pengukuran luas bidang tanah dan pembuatan peta bidang tanah.
Puspita (2013) meneliti mengenai pembuatan Digital Elevation Model (DEM) menggunakan foto udara format kecil untuk estimasi sedimen lahar dingin di sebagian Kali Gendol Gunung Merapi. DEM FUFK memiliki resolusi 5 m, akurasi horisontal sebesar 12,9 m dan akurasi vertikal sebesar 17,51 m. Perhitungan volume sedimen menggunakan metode cut and fill pada DEM LIDAR. Total volume sedimen yang bertambah ialah 5,27 juta m3, untuk volume yang berkurang sebesar 4,96 juta m3, dan selisih untuk volume akhir ialah 0,31 juta m3 sepanjang sungai penelitian. Contoh penelitian tersebut menunjukkan peluang pemanfaatan foto udara format kecil. Pemanfaatan tersebut berupa pengolahan foto udara format kecil menjadi Digital Elevation Model (DEM).
Stereoplotting merupakan salah satu alternatif pembuatan DEM dimana dalam
pelaksanaannya diperlukan nilai Exterior Orientation Parameter (EOP) melalui tahapan Aerial Triangulation (AT) atau Relative Orientation (RO). Nilai EOP dari AT merupakan hasil model perhitungan bundle adjustment, sedangkan nilai EOP yang diperoleh dari hasil RO dilanjutkan dengan proses absolute orientation.
Beberapa metode yang digunakan untuk membentuk DEM tentunya perlu dipastikan terlebih dahulu tingkat ketelitian yang dihasilkan, sehingga pengguna dapat mempertimbangkan metode yang tepat untuk membuat DEM sesuai dengan tingkat akurasi yang diperlukan. Penelitian ini mengkaji akurasi DEM hasil
stereoplotting pada foto udara format kecil dengan menggunakan acuan SNI dan
ketelitian yang pernah dilakukan Lee (2008). Software yang digunakan untuk melakukan penelitian ini adalah DAT/EM Summit Evolution.
I.2. Rumusan Masalah
Kebutuhan akan pengambilan data rupa bumi dalam skala besar semakin besar. Foto udara format kecil merupakan salah satu metode alternatif dalam pengambilan data rupa bumi skala besar yang murah namun memiliki kelemahan pada sistem lensanya. Untuk penggambaran peta rupa bumi skala besar, foto udara format kecil
diolah menjadi DEM dengan metode stereoplotting interaktif. Beberapa penelitian sudah mengkaji akurasi pembuatan DEM menggunakan foto udara format kecil. Namun belum ada yang mengkaji akurasi pembuatan DEM tersebut dengan metode
stereoplotting interaktif dengan memanfaatkan data pengukuran terestris sebagai
pembanding.
I.3. Pertanyaan Penelitian
Berdasarkan rumusan masalah, pertanyaan penelitian yang sesuai adalah :
1. Berapa akurasi DEM yang dihasilkan dari proses stereoplotting interaktif foto udara format kecil menurut SNI 19-6502.1-2000 ?
2. Berapa akurasi DEM yang dihasilkan dari proses stereoplotting interaktif berdasarkan perbandingan nilai standar deviasi dan ketelitian maksimal rata-rata mengacu pada penelitian oleh Lee (2008)?
I.4. Cakupan Penelitian Cakupan penelitian ini adalah :
1. Lokasi penelitian berada di sebagian wilayah Desa Banyuripan, Kecamatan Bayat, Kabupaten Klaten.
2. Data ketinggian yang dihasilkan dari pengukuran terestris digunakan sebagai data pembanding dalam perhitungan akurasi DEM hasil
stereoplotting interaktif.
3. Kajian akurasi mengacu pada SNI 19-6502.1-2000 tentang spesifikasi teknis peta rupa bumi skala 1:10000 dan perbandingan antara standar deviasi dan nilai ketelitian rata-rata sebagaimana penelitian yang pernah dilakukan oleh Lee (2008).
I.5. Tujuan Tujuan penelitian ini yaitu :
1. Teridentifikasinya tingkat akurasi DEM hasil proses stereoplotting interaktif pada foto udara format kecil menurut SNI 19-6502.1-2000. 2. Teridentifikasinya tingkat akurasi DEM hasil stereoplotting interaktif
berdasarkan perbandingan nilai standar deviasi dan ketelitian maksimal rata-rata mengacu pada penelitian oleh Lee (2008).
I.6. Manfaat
Diharapkan hasil penelitian ini dapat memberikan informasi mengenai keakuratan DEM dari proses stereoplotting foto udara. Selain itu juga sebagai referensi dalam pengambilan keputusan mengenai metode yang sesuai untuk pembuatan DEM dari FUFK.
I.7. Tinjauan Pustaka
Melasari (2014) melakukan penelitian mengenai kajian akurasi DEM hasil
stereoplotting pada foto udara format medium di kawasan lembah Universitas
Gadjah Mada, Yogyakarta. Metode yang digunakan dalam penelitian adalah
stereoplotting interaktif. Hasil yang diperoleh yaitu nilai standar deviasi sebesar
0,434 m dan lebih kecil dari nilai ketelitian maksimal rata-rata yaitu 0,456 m.
Pranadita (2013) membuat DEM dari foto udara format format medium menggunakan kamera DigiCAM di kawasan kampus Universitas Gadjah Mada, Yogyakarta. Metode yang digunakan adalah stereoplotting interaktif. Kesimpulan yang dapat diambil adalah nilai standar deviasi dari DEM hasil stereoplotting foto udara format sedang sebesar 0,628 m.
Abdullah (2010) dalam sebuah artikel ilmiah Mapping Matters mengemukakan bahwa ketelitian vertikal seringkali lebih baik dari ketelitian horisontal menurut standar ASPRS. Hal tersebut dapat disebabkan karena cara penentuan standar untuk
vertikal berbeda dengan horisontal. Apabila standar horisontal mempertimbangkan GSD dan skala produk/enlargement ratio yang dihasilkan berdasarkan skala penerbangan, maka standar vertikal menggunakan mempertimbangkan GSD dan interval kontur.
Lee (2008) meneliti mengenai kesesuaian airborne video data untuk fotogrametri. Video diperoleh menggunakan kamera non metrik dengan menggunakan skala 1:45.000. IOP dan distorsi foto diselesaikan menggunakan model parameter distorsi Jacobsen. Penelitian ini memperoleh hasil RMSE 0,5 m untuk horisontal dan 0,6 s.d 0,8 meter untuk vertikal.
Tanjung (2006) menerapkan bundle block adjustment pada foto udara format kecil untuk menghasilkan data digital terrain model di kawasan lembah kampus Universitas Gadjah Mada, Yogyakarta. Hasil yang diperoleh yaitu DEM hasil ekstraksi yang sudah terikat absolut pada sistem koordinat tanah. DEM tersebut tidak menunjukkan kenyataan yang ada di lapangan karena DEM diekstrak berdasarkan kesamaan nilai derajat keabuan yang dapat juga tidak terletak di permukaan tanah.
Sudiyatmoko (1999) membuat DEM menggunakan foto udara format kecil di daerah Madiun. Metode yang digunakan adalah image matching dan teknik korelasi silang antar kedua foto. Adapun hasil yang diperoleh adalah kenampakan anaglyph (kenampakan 3D) dan kenampakan kontur DEM. Setelah dibandingkan dengan peta 1:1000, diperoleh rata-rata selisih untuk arah x yaitu 5,966 m, untuk arah y yaitu 10,738 m dan untuk arah z sebesar 2,989 m.
Penelitian-penelitian tersebut meninjau ketelitian DEM dari beberapa sumber data dan metode yang berbeda. Penelitian ini mengkaji akurasi DEM dihasilkan dari foto udara format kecil dan menggunakan metode stereoplotting interaktif menggunakan dua buah tinjauan.
Tinjauan pertama menggunakan metode perbandingan standar deviasi dan ketelitian maksimal rata-rata. Sebelumnya, metode perbandingan standar deviasi dan ketelitian maksimal rata-rata ini pernah dilakukan oleh Lee (2008) dan Melasari
(2014). Apabila nilai standar deviasi kurang dari nilai ketelitian maksimal rata-rata, maka hasil stereoplotting sudah mendekati ground.
Tinjauan kedua adalah tinjauan akurasi menggunakan SNI 19-6502.1-2000 yaitu dilakukan perhitungan terhadap selisih antara beda tinggi pada hasil
stereoplotting dan data terestris. Setelah diperoleh penyimpangan beda tinggi untuk
keseluruhan data, maka data tersebut dibandingkan dengan kriteria SNI sehingga diperoleh presentase data yang masuk kriteria SNI dan yang tidak masuk kriteria SNI.
I.8. Landasan Teori I.8.1. Foto Udara Format Kecil
Teknologi FUFK pada dasarnya adalah menghasilkan foto udara dengan menggunakan kamera non metrik/kamera amatir (kamera yang tidak didesain untuk keperluan pemotretan udara) dan menggunakan pesawat ringan (ultralight). Kamera format kecil memiliki sistem lensa yang tidak didesain untuk keperluan pemetaan sehingga disebut kamera non metrik dan harganya relatif murah, tetapi sangat potensial memiliki distorsi geometri (Belinda, 2013).
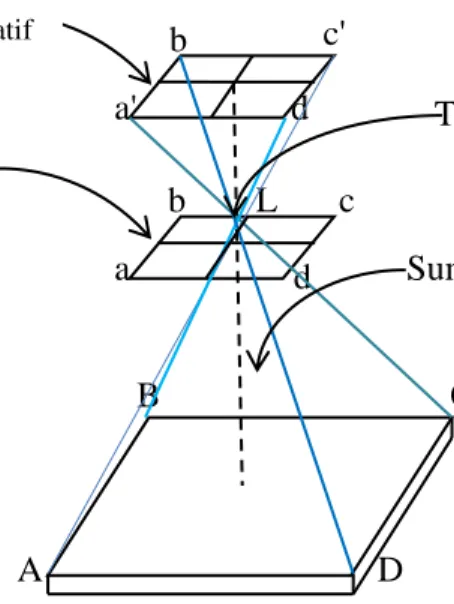
Foto udara yang dibuat dari pesawat terbang dengan arah sumbu optik kamera tegak lurus atau sangat mendekati tegak lurus disebut foto udara tegak. Meskipun telah diusahakan dengan hati-hati agar sumbu kamera tetap tegak lurus, tetapi adanya kesendengan (tilt) kecil masih dapat terjadi. Bagaimanapun juga, foto udara yang dianggap tegak lurus tersebut, biasanya mempunyai kesendengan kurang dari 1o dan jarang yang melebihi 3o. Foto udara yang mengandung kesendengan kecil tak tersengaja semacam ini disebut foto udara sendeng (tilted photograph). Geometri foto udara format kecil pada dasarnya memiliki geometri foto udara tegak seperti yang diilustrasikan pada Gambar I.1 berikut.
Gambar I.1 Geometri sebuah foto udara tegak (Wolf, 1983) I.8.1.1 Ground Spatial Distance (GSD)
Salah satu unsur sensor kamera adalah resolusi spasial sensor atau resolusi spasial kamera. Resolusi spasial kamera adalah ukuran dari sebuah piksel dalam mikron sedangkan ukuran satu piksel pada objek yang dipotret disebut Ground
Spatial Distance (GSD). Soeta’at (2011) menyatakan bahwa besarnya nilai GSD
dapat dihitung menggunakan rumus (1.1) dan skala pada rumus (1.2) berikut.
GSD = angka skala * resolusi spasial...(1.1)
Skala =
...(1.2)
Teknologi FUFK, pada dasarnya adalah menghasilkan foto udara dengan menggunakan kamera non metrik/kamera amatir (kamera yang tidak didesain untuk keperluan pemotretan udara) dan menggunakan pesawat ringan (ultralight) atau pesawat model. Apabila jenis kamera diklasifikasikan berdasarkan ukuran film (frame) dan panjang fokus kamera, terdapat tiga golongan yaitu : kamera format standar, format medium dan format kecil (Belinda 2013).
Harintaka (2003) menyebutkan bahwa FUFK pada awalnya menggunakan kamera non metrik dengan ukuran frame sekitar 24 x 36 mm dengan fokus antara 24
L D C B A d c b a d ' c' b ' a' P Sumbu optik Titik Pemotretan Positif Negatif
s.d 36 mm dan dimensi CCD antara 5 s.d 10 mikron, tinggi terbang 800 s.d 1000 m di atas permukaan tanah, sehingga skala empirik sekitar 1:20.000 s.d 1:40.000 dengan nilai GSD antara 10 s.d 20 cm. Namun saat ini penggunaan teknologi UAV dengan berbagai variasi jenis lensa dapat diklasifikasikan dalam jenis FUFK.
I.8.2. Parameter Orientasi Luar (Exterior Orientation Parameter)
EOP dapat diperoleh menggunakan dua buah cara, yaitu pertama melalui proses IO, RO dan AO. Cara kedua adalah dengan melakukan bundle adjustment atau triangulasi udara.
I.8.3.1 Orientasi pada Foto Udara
Kraus (2007) menyebutkan bahwa proses orientasi meliputi :
1. Model stereo dalam sistem koordinat 3D dibuat dari dua buah foto
2. Setelah itu, model ditransformasikan ke dalam sistem koordinat 3D (XYZ) dalam sistem koordinat tanah
Hubungan antara koordinat model (x,y,z) dengan koordinat tanah (X,Y,Z) dapat dijelaskan dalam persamaan (1.3) berikut.
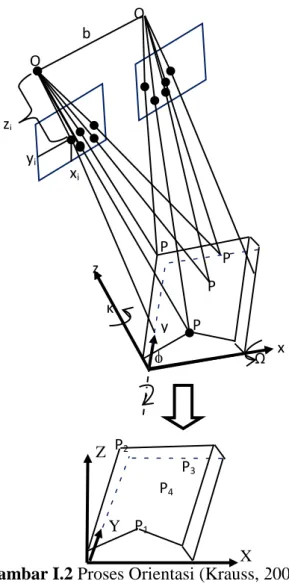
...(1.3) Proses pembentukan model melalui dua buah foto dan transformasi ke dalam sistem koordinat tanah dijelaskan dalam Gambar I.2 berikut.
Gambar I.2 Proses Orientasi (Krauss, 2007) Keterangan Gambar I.2 :
: koordinat pusat proyeksi kamera
: koordinat obyek pada sistem koordinat model : koordinat obyek pada sistem koordinat tanah skala pada sistem xyz
matriks rotasi 3D dalam sistem xyz ke sistem XYZ yang didefinisikan dalam ,φ, κ
P1, P2,..P4 : obyek di permukaan bumi
b : basis foto/jarak pemotretan antara dua pusat foto yang bersebelahan O1, O2 : pusat proyeksi kamera
ω : rotasi pada sumbu x foto
: rotasi pada sumbu y foto
Y X P1 P3 P2 Z P4 b O 2 κ Ω zi P 4 P 3 P 2 P 1 y x z O 1 yi xi
κ : rotasi pada sumbu z foto
Santoso (2004) menyatakan bahwa IO, RO dan AO merupakan tahapan pembentukan model 3D dari pasangan foto atau disebut dengan restitusi foto. Restitusi dapat diartikan sebagai pengembalian sesuatu yang hilang, atau rekonstruksi model (3D) dari pasangan foto (2D). Model ini kemudian digunakan sebagai panduan penurunan peta. Proses orientasi adalah sebagai berikut.
a. Dalam konteks fotogrametri, dikenal beberapa sistem koordinat yang berhubungan dengan foto udara, yaitu : sistem koordinat foto, sistem koordinat model, dan sistem koordinat peta/tanah. Sistem koordinat foto adalah sistem koordinat dua dimensi sebuah foto dengan titik originnya adalah titik perpotongan garis tepi (fiducial mark). Foto yang diperoleh dari pemotretan udara, baik yang menggunakan kamera digital maupun analog yang kemudian disiam, memiliki sistem koordinat piksel, sehingga peerlu ditransformasi ke sistem koordinat foto. Transformasi dari sistem koordinat piksel ke sistem koordinat foto disebut sebagai orientasi dalam. Model matematis untuk orientasi dalam adalah Affine 2D (Mensah, 1999 dalam Harintaka, 2008). Transformasi Affine 2D dirumuskan dalam persamaan (1.4) dan (1.5) berikut
x = a1 + a2u + a3v………(1.4)
y = a4 + a5u + a6v………(1.5)
dalam hal ini a1 ,a2 , a3 , a4 , a5 , a6 merupakan parameter transformasi yang
terlebih dahulu ditentukan dengan menggunakan hasil pengukuran minimal 3 buah tanda tepi hasil kalibrasi kamera dengan posisinya dalam sistem koordinat piksel. Jika diketahui 4 atau lebih tanda tepi maka dengan persamaan (1.4) dan (1.5) dilakukan estimasi kuadrat terkecil.
b. Orientasi relatif yaitu dua berkas sinar yang sepadan/berpasangan dari proyektor kiri dan kanan. Bila minimal 5 pasang sinar berpotongan, maka seluruh pasangan sinar dari kedua berkas membentuk model 3D. Dengan cara digital, orientasi relatif menggunakan syarat kesebidangan (coplanarity).
c. Dalam orientasi absolut, model 3D relatif yang masih dalam sistem koordinat instrumen (sembarang) ditransformasikan ke dalam sistem definitif. Pada tahap ini diperlukan minimal 3 titik kontrol model. Secara analog, terhadap model relatif dilakukan penyekalaan dan pendataran. Bila dilakukan secara numerik, maka yang digunakan rumus yang digunakan adalah transformasi sebangun 3D.
I.8.3.2 Bundle Adjustment
Bundle Adjustment merupakan persamaan baku yang dapat diaplikasikan untuk
beberapa orientasi fotogrametri dan masalah penentuan titik. (Konecny, 2003 dalam Tanjung, 2006). Hubungan antara sistem koordinat foto dengan sistem koordinat tanah dapat dilihat melalui Gambar I.3 berikut.
Gambar I.3 Hubungan koordinat foto dengan koordinat tanah (Harintaka dkk 2008 dalam Pranadita 2013)
Prinsip bundle adalah menggunakan inverse persamaan (1.3) yang dimodifikasi untuk menunjukkan koordinat foto merupakan fungsi dari koordinat peta, sebagaimana ditunjukkan oleh persamaan (1.6), dengan r11,….,r33 merupakan fungsi
rotasi terhadap sumbu X,Y,Z. Pembentukan matrik R atau RT (transpose matrik R) dapat dilihat secara mendetail pada Krauss (1994), Morgan (2004), dan Wolf(1983). Persamaan konform tiga dimensi yang terbentuk tertuang dalam rumus (1.6) :
(1.6)
Untuk menunjukkan bahwa posisi sebuah obyek yang berada di foto, di permukaan tanah dan pusat proyeksi berada dalam satu garis lurus maka dapat dibangun sebuah persamaan kolinier atau persamaan kesegarisan, yaitu dengan cara membagi baris ke-1 dan baris ke-2 dengan baris ke-3, sehingga diperoleh persamaan (1.7) dan (1.8) :
...(1.7)
...(1.8)
Persamaan (1.7) dan (1.8) merupakan persamaan non linear dan masih memiliki enam parameter yang belum diketahui nilainya . Karena persamaan (1.7) dan (1.8) bukan merupakan persamaan linear, maka dilakukan proses linearisasi dengan menggunakan deret Taylor yaitu dengan menurunkan persamaan ke masing-masing parameter, sehingga diperoleh persamaan (1.9) dan (1.10) : ………..(1.9)
Proses pembentukan persamaan normal untuk menyelesaikan persamaan (1.9) dan (1.10) dapat dilihat lebih lanjut pada Kraus (1993), Morgan (2004) dan Wolf (1983). Dalam proyek pemetaan udara, untuk keperluan efisiensi biaya dan mempercepat proses, dipergunakan jumlah titik kontrol tanah (GCP) seminimum mungkin. Umumnya GCP ditempatkan pada setiap interval 4 s.d 6 basis foto (Koneckny, 2003 dalam Harintaka, 2008). Untuk perapatan GCP tersebut dipergunakan Triangulasi Udara (TU), dimana secara matematis menggunakan teknik hitungan BBA. Perapatan GCP ini menggunakan titik sekutu (umumnya
berjumlah 6 buah) antar foto yang bertampalan, yang disebut sebagai tie point atau titik von Gruber. Keseluruhan TKT dan tie point tersebut dilakukan perataan (adjustment) secara serempak dengan menggunakan persamaan (1.9) dan (1.10) dengan ditambah koordinat titik (P) sehingga persamaan (1.9) dan (1.10) dapat diperluas menjadi persamaan (1.11) dan (1.12) berikut.
. ...(1.11) ...(1.12) I.8.3. Stereoplotting
Stereoplotting merupakan metode pengumpulan data yang dilakukan dengan
cara digitasi titik obyek dari foto stereo secara 3D, sehingga dapat diperoleh data vektor yang memiliki nilai ketinggian. Secara umum plotting dapat dilakukan dengan dua cara yaitu, plotting interaktif dan plotting otomatis. Plotting otomatis dilakukan dengan cara memperoleh posisi titik-titik obyek pada foto secara matematis, proses penentuan titik-titik obyek dapat dilakukan dengan menggunakan persamaan
intersection (Habib 2007 dalam Pranadita 2013).
Melasari (2014) berpendapat bahwa stereoplotting adalah metode pengumpulan data vektor yang memiliki nilai ketinggian (z) yang data dilakukan secara otomatis atau interaktif. Stereoplotting interaktif dilakukan dengan cara digitasi 3D pada foto udara stereo. Adapun faktor yang mempengaruhi stereoplotting adalah kemampuan operator dalam menentukan posisi kursor plotter diatas ground apabila di daerah terbuka.
Menurut Moffit (1980), apabila sepasang foto udara yang bertampalan benar-benar tegak dan memiliki ketinggian yang sama, maka seseorang dengan penglihatan normal mampu melihat foto secara stereoskopik melalui area yang bertampalan. Namun apabila foto yang terjadi adalah tidak tegak (tilted photograph) dan memiliki
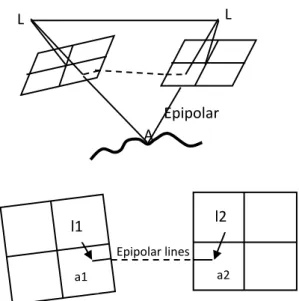
tinggi terbang yang berbeda maka pada bidang terlihat dua buah stasiun yaitu L1 dan L2 sebagaimana diilustrasikan pada Gambar I.4 berikut.
Gambar I.4 Epipolar plane dan epipolar lines (Moffit, 1980) Keterangan Gambar I.4 :
L1 , L2 : pusat proyeksi foto 1 dan 2
l1, l2 : segmen garis obyek A yang memotong dua buah foto (epipolar
lines)
L1, L2 dan A : bidang yang memuat L1, L2 dan A (epipolar plane)
Selain kondisi saat pemotretan yang tidak tegak, beberapa faktor dapat mempengaruhi proses stereoskopik. Faktor-faktor tersebut adalah tinggi terbang yang tidak sama, misalignment dari jalur penerbangan, misalignment dari stereoskop dan beda paralaks yang besar diantara foto yang bertampalan.
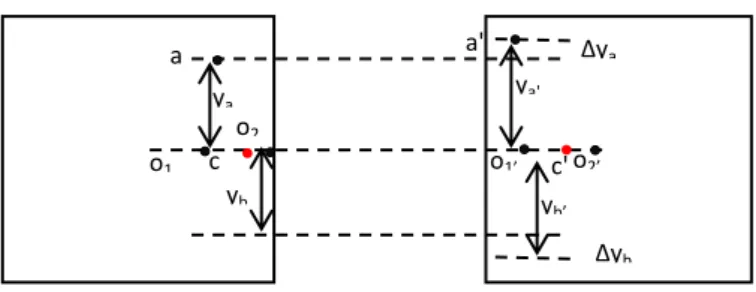
Tinggi terbang yang tidak sama menyebabkan perbedaan skala antara dua buah foto yang bertampalan. Walaupun tidak terdapat tilt pada saat pemotretan dan jalur terbang sudah selaras, perbedaan skala antar foto menyebabkan jarak antara satu gambar konjugasi dan jalur penerbangan berbeda dengan jarak antara gambar yang sesuai dan jalur penerbangan. Perbedaan tersebut dijelaskan pada Gambar I.5 berikut. A Epipolar plane L 2 L 1 Epipolar lines a1 l2 l1 a2
Gambar I.5 Penyebab paralaks Y (Moffit 1980)
Foto kiri memiliki skala yang lebih kecil daripada foto kanan. Hal ini disebabkan karena perbedaan tinggi yang besar. Apabila jalur terbang diasumsikan sebagai sumbu x, maka koordinat y pada a lebih kecil daripada koordinat y pada a’. Perbedaan tersebut dinotasikan dengan Δya. Δya dan Δyb disebut paralaks Y.
I.8.4. Paralaks
Paralaks stereoskopis merupakan perbedaan posisi bayangan sebuah titik pada dua buah foto yang bertampalan karena perubahan posisi kamera (Zorn 1984 dalam Pranadita 2013) dengan melihat obyek secara stereo maka suatu obyek dapat dilihat secara simultan dari dua perspektif yang berbeda, seperti foto udara yang diambil dari kedudukan kamera yang berbeda untuk memperoleh kesan 3D. Untuk dapat menghasilkan ketinggian tepat pada permukaan obyek maka syarat yang harus dipenuhi ialah besarnya paralaks X dan paralaks Y sama dengan nol atau mendekati nol. Besar paralaks dapat dieliminir dengan mengetahui parameter orientasi luar untuk masing-masing foto. Perbedaan paralaks diilustrasikan dalam Gambar I.6 berikut
Gambar I.6 Perbedaan paralaks dan tinggi relatif (Sosrodarsono, 2005)
Gambar I.6 adalah sebagian pandangan untuk menunjukkan keadaan pengambilan set foto-foto nadir pada tinggi terbang yang sama. Jarak antara pusat
a' c' o2 ya a o1 c yb o1’ o2’ ya' yb’ Δya Δyb T1 P2 a1 ’ P a1 P1 b2 a2 B O 1 O 2 H ΔH T2 C A B c
persepektif O1 dan O2 disebut panjang basis udara. Paralaks titik A dinyatakan
dengan persamaan (I.13) sebagai berikut.
………..………...(1.13)
……….……...(1.14)
……….(1.15)
Persamaan (1.15) memberikan hubungan antara paralaks dan jarak H dari kamera ke permukaan tanah.
Menurut Wolf (1980), paralaks titik dapat diukur pada saat mengamati secara stereoskopik. Pengukuran stereoskopik paralaks menggunakan asas floating mark atau tanda apung. Bila model stereo diamati dengan stereoskop, dua tanda titik yang digoreskan pada kaca bening disebut tanda tengahan (half marks) dapat diletakkan di atas foto, satu di atas foto kiri dan lainnya di atas foto kanan.
Tanda kiri diamati dengan mata kiri dan tanda kanan diamati dengan mata kanan. Tanda tengahan dapat digeser posisinya hingga keduanya menyatu menjadi satu yang tampak pada model stereo dan terletak pada ketinggian tertentu. Bila dua tanda tengahan diletakkan saling mendekat, paralaks tanda tengahan bertambah besar dan tanda yang menyatu tampak lebih tinggi. Sebaliknya, kalau dua tanda digeser menjauh maka paralaksnya menjadi semakin kecil, dua tanda yang menyatu tampak menurun. Perbedaan tampak ketinggian tanda sesuai dengan jarak tengahan yang berbeda-beda merupakan dasar bagi istilah “tanda apung/floating mark”.
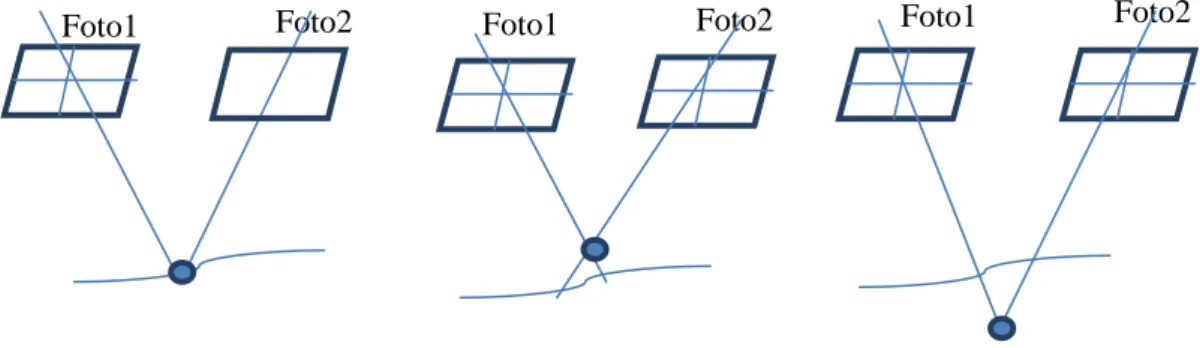
Gambar I.7 merupakan ilustrasi posisi floating mark pada software secara digital (Melasari 2014), sebagai berikut.
Gambar I.7 Ilustrasi posisi kursor saat stereoplotting (Melasari, 2014)
I.8.5. Digital Elevation Model (DEM)
Mogal (1993) dalam Purwanto (2013) menyatakan bahwa DEM khususnya digunakan untuk menggambarkan relief medan. Gambaran model relief rupabumi 3D yang menyerupai keadaan sebenarnya di dunia nyata (real world) divisualisasikan dengan bantuan teknologi komputer grafis dan teknologi virtual reality. Sedangkan Doyle (1991) dalam Purwanto (2013) berpendapat bahwa DEM merupakan suatu sistem, model, metode dan alat dalam pengumpulan, pengolahan dan penyajian informasi medan. Susunan nilai-nilai digital yang mewakili distribusi spasial dari karakteristik medan, distribusi spasial diwakili oleh nilai-nilai pada sistem koordinat X Y dan karakteristik medan diwakili oleh ketinggian medan dalam sistem koordinat Z.
Berdasarkan kedua pendapat tersebut, dapat disimpulkan bahwa DEM adalah suatu gambaran permukaan bumi 3D (X,Y,Z) yang mewakili karakteristik medan dan disajikan secara visual menggunakan bantuan teknologi komputer grafis. Sebelum meninjau akurasi DEM terlebih dahulu memahami pengertian akurasi dan presisi. Soe’taat (2011) mengemukakan bahwa akurasi merupakan besar kedekatan (penyimpangan) dari hasil ukuran terhadap true value (nilai yang betul). Sedangkan presisi adalah derajat konsistensi dari set pengukuran. Adapun perbedaan akurasi dan presisi diilustrasikan pada Gambar I.8 berikut ,
Foto1 Foto2 Foto1 Foto2 Foto1 Foto2
posisi kursor tepat di permukaan ground
posisi kursor
Gambar I.8 Ilustrasi presisi dan akurasi (Soe’taat, 2011)
Gambar I.8 menunjukkan ilustrasi presisi dan akurasi, yaitu Gambar I.8 (a) menunjukkan hasil yang presisi dan akurat. Gambar I.8 (b) menunjukkan hasil yang akurat namun tidak presisi. Gambar I.8 (c) menunjukkan hasil yang presisi namun tidak akurat. Gambar I.8 (d) menunjukkan hasil yang tidak akurat dan tidak presisi. Sehubungan dengan ketelitian DEM yang digunakan dalam penelitian ini terdapat beberapa tinjauan pustaka yaitu,
I.8.6.1 Berdasarkan rata-rata dan standar deviasi
Purwanto (2013) berpendapat bahwa akurasi DEM ditunjukkan dengan nilai rata-rata absolut dan standar deviasi. Ketelitian DEM dapat dilihat dari besarnya nilai rata-rata dalam rumus (1.16), varian dalam rumus (1.17) dan standar deviasi dalam rumus (1.18), yaitu : ...(1.16) σ2 = ...(1.17) σ = ...(1.18) Keterangan rumus :
: rata-rata beda tinggi σ2
: varian
σ : standar deviasi
: titik sample ke-i : jumlah data sample
I.8.6.2 Berdasarkan nilai ketelitian maksimal rata-rata
Lee (2008) menyatakan bahwa presisi pengukuran 3D dalam model stereo didasarkan pada skala dan basis sebagaimana dihitung dengan rumus (1.19), (1.20) dan (1.21) berikut.
Sz = ...(1.19) Sx = ...(1.20) Sy = ...(1.21) Keterangan rumus :
Sx, Sy, Sz : ketelitian maksimal koordinat x,y,z pada DEM
b : panjang basis foto (m)
h : tinggi terbang pesawat saat memotret (m)
f : panjang fokus kamera (mm)
Sp : precision of image measurement (m)
Dalam penelitiannya mengenai kamera non metrik, Lee mengungkapkan bahwa apabila nilai standar deviasi dari lebih kecil dari nilai ketelitian maksimal rata-rata maka akurasi dapat diterima untuk model 3D.
I.8.6.3 Berdasarkan nilai GSD (Ground Spatial Distance) dan skala
Abdullah (2010) dalam artikel Mapping Matters mengungkapkan bahwa menurut standar ASPRS, GSD yang digunakan menyesuaikan dengan skala peta dan interval kontur. Misal, skala 1:7.200 didesain untuk mendukung produk peta skala 1:1.200 atau 6 kali enlargement ratio. CCD yang dimiliki adalah 0,125 mm sehingga dengan skala 1:1.1200, GSD yang dihasilkan adalah 15 cm.
Dalam penelitian ini, skala yang digunakan adalah 1:43000 yang didapatkan dari perbandingan antara fokus pemotretan dan tinggi terbang. Adapun CCD yang
dihasilkan dari kalibrasi kamera adalah 0,005 mm dengan asumsi kalibrasi kamera sudah baik. Melalui nilai CCD dan skala tersebut, dihasilkan nilai GSD sebesar 21,5 cm. Menurut standar ASPRS yang dikemukakan Abdullah (2010), produk yang dihasilkan dari pemotretan skala 1:43000 ini adalah 1:4300 hingga 1:7000 sesuai dengan 6 s.d 10 kali enlargement ratio.
I.8.6.4 Berdasarkan SNI
SNI 19-6502.1-2000 tentang spesifikasi teknis peta rupa bumi skala 1:10000 memiliki peraturan mengenai ketelitian horisontal dan vertikal sebagai berikut.
a. Ketelitian horisontal : seluruh detil yang diteliti, diplot sedemikian rupa sehingga posisinya di skala tersebut memiliki nilai = 0,3 mm RMSE yang merupakan nilai koordinat masing-masing detail diskalakan terhadap garis grid terdekat dibandingkan dengan hasil hitungan koordinat yang diteliti di lapangan yang diikatkan terhadap titik kontrol planimetris terdekat.
b. Ketelitian vertikal peta rupa bumi skala 1:10000 dinyatakan dengan kriteria sebagai berikut.
1. Bila dilakukan uji ketelitian, maka tidak lebih dari 10% titik yang diuji memiliki kesalahan horisontal lebih dari 0,5 mm kali skala peta.
2. Tidak lebih dari 10% titik tinggi yang diuji memiliki kesalahan vertikal lebih dari setengah selang kontur.
3. Akurasi diuji dengan perbandingan ketelitian di atas peta dan data survey berketelitian lebih tinggi.
4. Jika peta yang telah diuji memenuhi standar ini, suatu pernyataan perlu dibuat pada legenda.
5. Jika peta yang telah diuji tidak memenuhi standar ini, tidak perlu ada pernyataan apapun pada legenda.
Dengan demikian, analisis akurasi DEM pada penelitian ini mengacu pada pustaka tersebut dengan penjelasan sebagai berikut.
1. Ditinjau berdasarkan nilai GSD dan SNI
Kriteria data yang digunakan mengikuti kriteria SNI yaitu 0,3 mm dikalikan skala peta. Adapun penentuan produk skala peta yang digunakan adalah hasil enlargement ratio dari skala penerbangan yaitu sebesar 6 s.d 10 kali GSD yaitu sebesar 1,29 m s.d 2,15 m atau dalam skala 1:4300 hingga 1:7000 untuk horisontal. Dengan skala 1:4300 hingga 1:7000, maka toleransi penyimpangan vertikalnya sebesar 1,075 m hingga 1,75 m.
2. Ditinjau berdasarkan standar deviasi dan ketelitian maksimal rata-rata Rumus yang digunakan adalah rumus rata-rata (1.16), varian (1.17), standar deviasi (1.18), rumus Sx (1.19), Sy (1.20) dan Sz (1.21). Dalam keadaan ideal, seharusnya nilai Sx sama dengan Sy. Namun pada kenyataannya dalam pemotretan sangat sulit didapatkan kondisi nilai Sx dan Sy yang sama, karena ketidakstabilan pesawat saat pemotretan. Adapun teknis perhitungan dijelaskan lebih rinci dalam bagian II.2.8.
I.8.6. Derajat Kepercayaan
Widjajanti (2011) mengemukakan bahwa umumnya setelah diperoleh estimasi titik, yaitu nilai rata-rata ( , varian (σ2
) dan standar deviasi (σ) dari suatu sampel, maka timbul pertanyaan seberapa jauh nilai statistik yang diperoleh menyimpang terhadap populasi. Mengingat statistik sampel merupakan estimasi untuk parameter populasi, maka jika ingin tahu seberapa baik estimasi nilai-nilai statistik tersebut hanya didapatkan perkiraan kemungkinan.
Di samping estimasi titik dapat juga ditentukan estimasi interval dari parameter yaitu menentukan interval konfidensi (selang kepercayaan) parameter sampel. Interval konfidensi suatu parameter p, dimana nilai estimasinya dinyatakan dalam persamaan (1.22) berikut.
………(1.22)
(1-α) disebut interval konfidensi, umumnya dinyatakan dalam prosentase 90%, 95%, (99%, dsb. Nilai dan masing-masing adalah batas atas dan batas bawah
untuk parameter p. Sedangkan disebut level of significance (tingkat kepercayaan). Apabila dari data sampel diperoleh nilai rata-rata dan varian dan berditribusi normal, maka nilai parameter populasi terletak pada interval sebagai berikut.
68,26%, dipercayai bahwa terletak antara nilai dan
95,44%, dipercayai bahwa terletak antara nilai dan
99,74%, dipercayai bahwa terletak antara nilai dan
I.8.7. Pengukuran Poligon
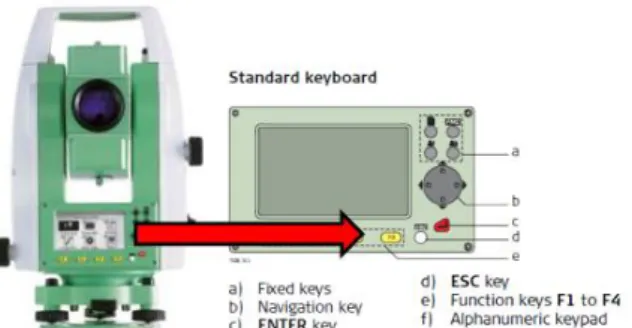
Prosedur analisis fotogrametri tidak bisa lepas dari pengukuran jarak dan elevasi dengan menerapkan prosedur pengukuran terestris. Pengukuran terestris tersebut banyak dilakukan saat penentuan premark pada foto udara. Menurut Basuki (2011), dalam bidang pengukuran tanah atau plane surveying, cara poligon umumnya lebih disukai daripada cara yang lain, karena kerangka ini memiliki banyak keuntungan, antara lain bentuknya mudah disesuaikan dengan daerah yang dipetakan, pengukurannya sederhana, peralatannya mudah didapat dan perhitungannya mudah. Adapun alat ukur total station yang umum digunakan untuk pemetaan terestris diilustrasikan pada Gambar I.9 berikut.
Gambar I.9.Alat ukur total station yang umum digunakan untuk pengukuran terestris (Leica_FlexLine_UserManual.pdf)
Poligon berasal dari kata poly yang berarti banyak dan gonos yang berarti sudut (Basuki, 2006). Secara harfiah artinya “sudut banyak”. Namun arti yang sebenarnya adalah rangkaian titik-titik secara berurutan, sebagai kerangka dasar pemetaan. Penentuan koordinat suatu titik misal titik 2 yang diikat pada titik 1 yang diketahui koordinatnya digunakan rumus (1.22) dan (1.23) :
...(1.23)
...(1.24) Keterangan rumus :
X1,Y1 : absis dan ordinat titik 1 (ikatan).
X2,Y2 : absis dan ordinat titik 2 (ditentukan).
d : jarak antara titik 1 dan 2. α : azimut dari titik 1 ke titik 2.
I.8.1.1 Poligon Terbuka
Poligon terbuka adalah poligon yang titik awal dan akhirnya terpisah. Poligon Terbuka Terikat Sempurna adalah poligon yang titik awal dan titik akhirnya diikatkan terhadap titik-titik yang telah diketahui koordinatnya.
I.8.1.2 Poligon Tertutup
Poligon tertutup adalah poligon yang titik awal dan akhirnya menjadi satu. Poligon ini banyak digunakan karena tidak membutuhkan titik ikat yang banyak. Pada dasarnya, poligon tertutup sama dengan poligon terbuka, hanya perbedaannya adalah pada bentuk geometrinya yaitu titik awal dan titik akhir pada poligon terbuka tidak berimpit, sedangkan pada poligon tertutup berimpit
I.9. Hipotesis
Berdasarkan tinjauan pustaka dan beberapa penelitian yang telah dilaksanakan sebelumnya, maka penelitian ini memiliki hipotesis sebagai berikut.
Data DEM yang dihasilkan dari teknik stereoplotting interaktif foto udara format kecil memiliki nilai standar deviasi pada sumbu z (σz) pada titik sampel 6 s.d 10 kali