i
Robot Pengikut Posisi dengan Menggunakan Deteksi
Warna
TUGAS AKHIR
Oleh :
FITRAH TRIATMOJO
4211401005
PROGRAM STUDI TEKNIK MEKATRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI BATAM
2018
ii
Robot Pengikut Posisi dengan Menggunakan Deteksi Warna
Tugas Akhir
Oleh :
Fitrah Triatmojo
4211401005
Disusun untuk memenuhi salah satu syarat kelulusan Program Diploma IV Program Studi Teknik Mekatronika
Politeknik Negeri Batam
PROGRAM STUDI TEKNIK MEKATRONIKA
POLITEKNIK NEGERI BATAM
iii
iv
LEMBAR PENGESAHAN TUGAS AKHIR
Tugas Akhir disusun untuk memenuhi salah satu syarat memperoleh gelar Sarjana Terapan Teknik(S.Tr.T)
di
Politeknik Negeri Batam
Oleh Fitrah Triatmojo
4211401005
Tanggal Sidang :
Disetujui oleh :
Dosen Penguji : Dosen Pembimbing :
1.Susanto, S.ST., M.Sc. 1. Dr.Budi Sugandi,S.T.M.Eng NIK.109068 NIK.100002
2.Kamarudin, S.T., M.T NIK.110071
v
Robot Pengikut Posisi dengan Menggunakan Deteksi Warna
Nama mahasiswa : Fitrah Triatmojo NIM : 4211401005
Pembimbing I : Dr.Budi Sugandi,S.T.M.Eng E-mail : [email protected]
ABSTRAK
Kemajuan teknologi pengolahan citra digital(Digital Image Processing)banyak dimanfaatkan oleh manusia. Manfaat pengolahan citra di antaranya adalah untuk meningkatkan kualitas suatu citra, menghilangkan cacat pada citra dan mengidentifikasi objek. Dengan memanfaatkan teknologi tersebut, maka dapat dikembangkan suatu sistem yang dapat mendeteksi objek serta melakukan tracking.
Pada Tugas akhir ini penulis akan membuat sebuah sistem untuk mendeteksi objek berwarna. Metode untuk mendeteksi warna penulis menggunakan colour filter HSV, erosi, dilasi,dan thresholding, sementara untuk membaca jarak objek penulis menggunakan metode Regresi sebagai input dan outputnya berupa aktuator motor dc.
Hasil yang dicapai dalam penelitian ini adalah sebuah sistem yang dapat mendeteksi objek berwarna dan dapat mengikuti objek yang telah di deteksi.
vi
Position Follower Robot Using Color Detection
Student Name : Fitrah Triatmojo NIM : 4211401005
Supervisor : Dr.Budi Sugandi,S.T.M.Eng E-mail : [email protected]
ABSTRACT
The progress of digital image processing technology (Digital Image Processing) is widely utilized by humans. The benefits of image processing include to improve the quality of an image, eliminate defects in the image and identify objects. By utilizing these technologies, it can be developed a system that can detect objects and perform tracking. In this final project will create a system to detect colored objects. The method to detect the color of the author using the color filter HSV, erosion, dilation, and thresholding, while to read the distance of the authors using the method of Regression as input and its output in the form of dc motor actuators.
The results achieved in this study is a system that can detect colored objects and can follow objects that have been in detection.
vii
KATA PENGANTAR
Pujian syukur kita ucapkan kepada Tuhan Yang Maha Esa karena atas anugerah dan rahmat-Nya penulis dapat menyelesaikan laporan Tugas akhir II.. Penulisan Laporan Tugas Akhir ini dimaksudkan untuk melengkapi persyaratan kelulusan tingkat Diploma IV Program Studi TeknikMekatronika Jurusan Elektro di Politeknik Negeri Batam. Penulis menyadari bahwa selama menyelesaikan laporan ini, begitu banyak bantuan, bimbingan, dan dukungan yang diberikan oleh berbagai pihak. Pada kesempatan ini saya mengucapkan terima kasih kepada yang terhormat:
1. Tuhan Yang Maha Esa atas semua limpahan hikmat dan karunia-Nya.
2. Bapak, Ibu, dan keluarga tercinta yang memberikan dukungan material, do’a, dan motivasi.
3. Bapak Dr. Priyono Eko Sanyoto selaku Direktur Politeknik Negeri Batam. 4. Bapak Dr.Budi Sugandi, S.T, M.Eng. Selaku Ketua Jurusan Teknik Elektro yang
selalu memberikan yang terbaik untuk kami dan selaku dosen pembimbing I yang selalu sabar dan setia membimbing, menemani dan memberi masukan-masukan bagi penulis disetiap kesempatan.
5. Bapak Heru Wijanarko, S.T.,M.Sc. Selaku ketua Program Studi Teknik Mekatronika yang selalu memberikan yang terbaik untuk kami.
6. Seluruh teman-teman seperjuangan yang telah membantu atas terselesaikannya buku laporan ini.
7. Dan seluruh pihak yang telah mendukung penulis yang tidak dapat disebutkan satu persatu.
Penulis menyadari sepenuhnya bahwa dalam penulisan ini masih terdapat kesalahan serta kekurangan, untuk itu penulis mengharapkan kritik dan saran dari pembaca demi membangun ilmu pengetahuan bersama.
Batam, Mei 2018
FITRAH TRIATMOJO NIM:4211401005
viii
DAFTAR ISI
PERNYATAAN KEASLIAN TUGAS AKHIR ... iii
LEMBAR PENGESAHAN TUGAS AKHIR ... iv
ABSTRAK ... v
ABSTRACT ... vi
KATA PENGANTAR ... vii
DAFTAR ISI ... viii
DAFTAR TABEL ... xii
BAB 1 PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Perumusan Masalah... 1
1.3 Batasan Masalah ... 2
1.4 Tujuan dan Manfaat ... 2
1.5 Sistematika Penulisan ... 2
BAB 2 DASAR TEORI ... 3
2.1 Akuisisi citra ... 3
2.2 Konsep Warna RGB ... 3
2.3 Skala warna HSV (Hue, Saturation, dan Value) ... 4
2.4 Thresholding... 6
2.5 Morfologi Filter ... 7
2.6 Metode Regresi ... 9
BAB 3 PERANCANGAN SISTEM ... 10
3.1 Perancangan Perangkat keras ... 10
3.2 Perancangan Perangkat lunak... 11
3.3 Flowchart sistem ... 12
3.4 Instrumen penelitian ... 12
BAB 4 HASIL DAN ANALISA ... 14
4.1 Colour filter ... 14
4.2 Morfologi(Dilasi dan Erosi) ... 16
4.3 Penggunaan metode regresi ... 17
4.4 Pengujian jarak deteksi... 18
ix BAB 5 KESIMPULAN ... 25 5.1 Kesimpulan... 25 5.2 Saran ... 25 DAFTAR PUSTAKA ... 26 BIOGRAFI PENULIS ... 28
x
DAFTAR GAMBAR
Gambar 2. 1 model ilustrasi RGB ... 4
Gambar 2. 2 model ilustrasi warna HSV ... 4
Gambar 2. 3 pemisahan objek dengan background hasil dari segmentasi citra(thresholding) ... 6
Gambar 2. 4 Gambar biner dan Gambar hasil dilasi ... 7
Gambar 2. 5 Gambar biner dan gambar hasil erosi ... 8
Gambar 3. 1 Diagram Blok Perangkat keras ... 10
Gambar 3. 2 Diagram blok sistem ... 11
Gambar 3. 3 Flowchart sistem ... 12
Gambar 4. 1 Capture objek sebelum range HSV diatur dan hasil binerisasi ... 14
Gambar 4. 2 Mengatur nilai range Hue dan hasil binerisasi ... 14
Gambar 4. 3 Mengatur nilai range Saturation dan hasil binerisasi ... 14
Gambar 4. 4 Mengatur nilai range Value dan hasil binerisasi ... 15
Gambar 4. 5 Perbandingan dengan 3 warna dan hasil binerisasi ... 15
Gambar 4. 6 Proses Erosi pada citra ... 16
Gambar 4. 7 Proses Dilasi pada citra ... 16
Gambar 4. 8 Proses Dilasi setelah proses Erosi... 17
Gambar 4. 9 Proses sistem mengikuti objek berwarna merah muda ... 17
Gambar 4. 10 sistem yang digunakan pada penelitian ini. ... 18
Gambar 4. 11 Pendeteksian objek diposisi tengah frame (A)jarak 50cm, (B)jarak60cm, (C)jarak 70cm, (D)jarak 80cm, (E)jarak 120cm, (F)jarak 180cm ... 18
Gambar 4. 12 pendeteksian objek diposisi kanan frame (A)jarak 50cm, (B)jarak60cm, (C)jarak 70cm, (D)jarak 80cm(E)jarak 120cm,(F)jarak 180cm ... 19
Gambar 4. 13 Pendeteksian objek diposisi kiri frame (A)jarak 50cm, (B)jarak60cm, (C)jarak 70cm, (D)jarak 80cm(E)jarak 120cm,(F)jarak 180cm ... 19
Gambar 4. 14 Grafik jumlah pixel terhadap jarak real. ... 20
Gambar 4. 15 program untuk frame bagian kiri ... 22
Gambar 4. 16 program untuk frame bagian kanan ... 22
xi Gambar 4. 18 (A)Objek terdeteksi disebelah kiri, maka (B) robot akan belok kiri ... 23 Gambar 4. 19 (A)Objek terdeteksi disebelah kanan, maka (B)robot akan belok kanan ... 23 Gambar 4. 20 (A)Objek terdeteksi ditengah, maka (B)robot akan maju ... 23
xii
DAFTAR TABEL
Tabel 4.1 Keberhasilan deteksi objek berdasarkan jarak...20 Tabel 4.2 Perbandingan jarak terukur dengan jarak real...21 Tabel 4.3 Keberhasilan mengikuti objek berdasarkan jarak...24
1
BAB 1
PENDAHULUAN
1.1 Latar Belakang Masalah
Manusia terus melakukan inovasi-inovasi pada teknologi disaat ini. Dengan adanya kemajuan teknologi tersebut tentunya akan membuat segalanya akan menjadi lebih cepat dan mudah. Sistem otomatis tentunya menjadi pilihan tepat untuk meringankan pekerjaan manusia, dimulai dari pekerjaan mudah hingga sulit, dan ringan hingga berat.
Koper, kereta dorong tentu sudah tidak asing digunakan oleh manusia. Misalkan koper berguna untuk mengangkut barang-barang bawaan ketika hendak bepergian, lalu kereta dorong biasa digunakan untuk mengangkut barang ketika berbelanja. Sekarang ini koper dan kereta dorong tersebut banyak yang masih digerakkan langsung oleh manusia, dimana hal tersebut masih belum efisien dan tergolong merepotkan.
Nugroho[1] telah melakukan penelitian untuk membuat sistem pendeteksi gerak dan mengikuti gerakan objek. Sistem ini terhubung dengan komputer yang melaksanakan algoritma secara real time untuk mencari tahu arah gerakan dari objek. David[2] melakukan penelitian faktor yang berpengaruh pada kinerja kamera dan pengaturan kombinasi untuk meminimalkan error fate of experiment. Hendawan[4] melakukan peneltian pengukuran jarak dengan menggunakan persamaan polinomial yang dibentuk dari perubahan nilai hue terhadap jarak.
Penulis akan melakukan penelitian untuk membuat sistem. Sistem didesain memiliki kamera untuk mendeteksi objek menggunakan deteksi warna, penulis juga melakukan pengukuran perubahan banyak pixel terhadap jarak yang bertujuan untuk memberi batasan maksimal dan minimal pada sistem agar mengikuti objek yang telah dideteksi.
1.2 Perumusan Masalah
Berdasarkan uraian pada latar belakang tersebut maka yang akan menjadi perumusan masalah penulis dari proyek tugas akhir ini adalah:
1. Bagaimana mendesain sistem yang dapat mendeteksi objek berwarna merah muda? 2. Bagaimana membuat sistem yang dapat mengikuti objek yang terdeteksi?
2
1.3 Batasan Masalah
Adapun batasan masalah penulis dalam pembuatan proyek tugas akhir ini adalah: 1. Sistem didesain untuk mengikuti 1 pola persegi berwarna merah muda
2. Sistem yang dirancang dapat mengikuti objek berwarna merah muda pada jarak 50-150cm.
3. Sistem yang dirancang dengan ukuran 20cm x 20cm x 20cm.
1.4 Tujuan dan Manfaat
Adapun tujuan yang ingin dicapai penulis dari pembuatan proyek tugas akhir ini adalah:
1. Membuat sistem yang dapat mendeteksi objek dengan warna tertentu. 2. Membuat sistem yang dapat mengikuti objek persegi berwarna merah muda.
Adapun manfaat yang ingin dicapai penulis dari pembuatan proyek tugas akhir ini adalah:
1. Sebagai simulasi bagi sistem otomasi pada wahana tanpa awak yang dpat mengikuti objek tertentu yang memudahkan pekerjaan manusia.
1.5 Sistematika Penulisan
Sistematika penulisan dalam penulisan proyek akhir terdiri dari:
BAB 1 Pendahuluan, berisi tentang latara belakang, rumusan masalah, batasan masalah, tujuan dan manfaat, dan sistematika penulisan. BAB 2 Berisi landasan teori,penjelasan teori-teori yang berkaitan dengan
penelitian untuk mendukung proyek akhir.
BAB 3 Berisi perancangan sistem yaitu uraian, motode atau pendekatan yang digunakan dalam menjawab permasalahan untuk mencapai tujuan penelitian
BAB 4 Berisi tentang hasil dan analisa yaitu hasil-hasil pengukuran dan pengujian yang dilakukan dalam penelitian
3
BAB 2
DASAR TEORI
Penelitian ini dilakukan dalam tiga tahap yaitu : tahap akuisisi citra, tahap pendeteksian atau segmentasi dan tahap penjejakan (traking). Pada tahap akuisisi citra yang dilakukan adalah pengkapturan objek dengan kamera. Pada tahap selanjutnya yaitu segmentasi yang bertujuan untuk medapatkan citra dengan suatu kualitas tertentu dan mengklarifikasi bermacam-macam citra. Dan tahap terakhir adalah tracking yang tujuannya adalah untuk mengikuti objek yang dideteksi. Pada bagian ini akan dibahas beberapa teori yang berkaitan dengan penelitian tugas akhir ini yang diawali dengan akuisisi citra, konsep warna RGB, skala warna HSV, thresholding, colour filter, morfologi filter, metode regresi.
2.1 Akuisisi citra
Akuisisi citra merupakan tahap awal untuk mendapatkan citra digital. Tujuan nya adalah untuk menentukan data yang diperlukan dan memilih metode perekaman citra digital. Tahap ini dimulai dari objek yang akan diambil gambarnya, persiapan alat-alat, dan pada pencitraannya. Dimana pencitraan adalah kegiatan transformasi dari citra (foto, gambar, lukisan, dll) tampak menjadi citra digital.[2]
2.2 Konsep Warna RGB
Ruang warna RGB banyak digunakan dan biasanya merupakan ruang warna default untuk menyimpan dan merepresentasikan gambar digital. Kita bisa mendapatkan ruang warna lain dari transformasi RGB linear atau non-linear Ruang warna RGB adalah ruang warna yang digunakan oleh komputer, kartu grafis dan monitor atau LCD. Seperti ditunjukkan pada Gambar 2.1 terdiri dari tiga komponen, merah, hijau dan biru, warna-warna primer. Warna apa pun dapat diperoleh dengan mencampur tiga warna-warna dasar. Tergantung pada seberapa banyak yang diambil dari setiap warna dasar, warna apa pun dapat dibuat..[5]
4 Gambar 2. 1 model ilustrasi RGB
2.3 Skala warna HSV (Hue, Saturation, dan Value)
HSV merupakan singkatan dari Hue, Saturation, dan Value. Berikut adalah karakteristik dari warna HSV yang diilustrasikan seperti gambar2.2. Hue menyatakan warna sebenarnya, seperti merah, violet, dan kuning dan digunakan menentukan kemerahan (redness), kehijauan (greeness), dsb.[3]dideskripsikan sebagai nilai yang spesifik yang menentukan posisi warna murni yang sesuai pada roda warna, yang berada direntang nilai antara 0 dan 1. Nilai 0 mengacu pada warna merah, 1/6 adalah kuning, 1/3 adalah hijau, dan sebagainya disekitar roda warna.[6] Saturation kadang disebut chroma, adalah kemurnian atau kekuatan warna. Warna merah yang asli nilai saturasinya adalah 1. Warna merah yang lebih muda (lebih terang) memiliki saturasi kurang dari 1 dan warna putih memiliki nilai saturasi 0.[6] Value adalah kecerahan dari warna. Nilainya berkisar antara 0-100 %. Apabila nilainya 0 maka warnanya akan menjadi hitam, semakin besar nilai maka semakin cerah dan muncul variasi-variasi baru dari warna tersebut.[3]
5 Linux menyediakan default warna RGB sehingga dibuatlah program untuk mengubah RGB menjadi HSV. Didalam library OpenCV versi 2.4 untuk bahasa pemrograman C, terdapat sintaks untuk mengkonversi warna RGB ke HSV yaitu:
cvCvtColor (src, dst, CV_RGB2HSV );
cvCvtColor adalah fungsi yang digunakan untuk mengkonvert citra input dari satu ruang warna menjadi satu ruang warna yang lain. Src adalah variabel citra input yang bertipe 8-bit (8u), dst adalah variabel citra output dengan tipe data sama dengan citra input. Dan CV_RGB2HSV digunakan untuk mengkonvert citra RGB menjadi HSV. Dimana persamaan didalam fungsi (CV_RGB2HSV) adalah sebagai berikut :
Data 1 pixel bernilai : R=255 , G=102, B=150
V max (R,G,B) (1)
V = 255 ;
Nilai V diperoleh dari mengambil nilai R,G,B yang paling tinggi nilainya, karena yang paling tinggi nilainya adalah R, maka V=R sehingga bernilai 255
S { ( ) (2) S = ( ) = = 0.6
Agar sesuai rentang maka S x 255, sehingga S bernilai 153. V adalah nilai dari value, Vmin
diperoleh dari mengambil nilai R,G,B yang paling rendah nilainya
H { ( ) ( ( )) ( ) ( )) ( ) ( ( )) (3) H = ( )( ) = ( )( ) = -18.82
6
Jika H < 0, maka H H+360 (4)
sehingga nilai H dijumlahkan dengan 360, nilai H bernilai 341, agar nilai H masuk kedalam rentang, maka nilai H dibagi 2 sehingga 341 dibagi 2 = 170 , rumus yang digunakan untuk mencaari H di pilih sesuai nilai V yang sama dengan nilai R,G atau B.
Sehinga output rentang nilai hasil konversi nilai RGB ke HSV adalah V255V, S153S, H170H(agar sesuai dengan range 0 hingga 255)
2.4 Thresholding
Segmentasi merupakan langkah pertama untuk memproses gambar untuk mengekstrak objek. Thresholding adalah Salah satu metode segmentasi citra yang memisahkan antara objek dengan background dalam suatu citra berdasarkan pada perbedaan tingkat kecerahannya atau gelap terangnya. Region citra yang cenderung gelap akan dibuat semakin gelap (hitam sempurna dengan nilai intensitas sebesar 0), sedangkan region citra yang cenderung terang akan dibuat semakin terang (putih sempurna dengan nilai intensitas sebesar 1). Oleh karena itu, keluaran dari proses segmentasi dengan metode thresholding adalah berupa citra biner dengan nilai intensitas piksel sebesar 0 atau 1. Setelah citra sudah tersegmentasi atau sudah berhasil dipisahkan objeknya dengan background, maka citra biner yang diperoleh dapat dijadikan sebagai masking utuk melakukan proses cropping sehingga diperoleh tampilan citra asli tanpa background atau dengan background yang dapat diubah-ubah.[9] persamaan yang digunakan untuk mengubah citra asli menjadi citra biner adalah sebagai berikut :
( ) { ( ) ( ) (5)
7
Color Filtering adalah suatu teknik pengolahan citra yang dipakai untuk memanipulasi suatu citra berdasarkan warna spesifik. Cara kerjanya adalah dengan membandingkan komponen warna setiap pixel citra dengan warna tertentu. Apabila warnanya sesuai dengan warna spesifik komponen warna pixel tersebut dibiarkan saja. Namun, bila warnanya tidak sesuai dengan warna spesifik maka komponen warna pixel
tersebut diubah menjadi warna background, biasanya menjadi warna hitam. Warna yang digunakan dalam Color Filtering dapat direpresentasikan dalam berbagai ruang warna. Ada beberapa ruang warna yang dikenal, antara lain RGB (Red,Green, Blue), HSV (Hue, Saturation, Value), YCbCr, dsb[2]
2.5 Morfologi Filter
Morfologi filter adalah teknik pengolahan citra yang bertujuan untuk memperbaiki citra. dan biasanya dilakukan pada gambar biner. Morfologi filter ini membutuhkan dua input pertama gambar asli dan kedua adalah structure element sebagai sifat operasi. [10]
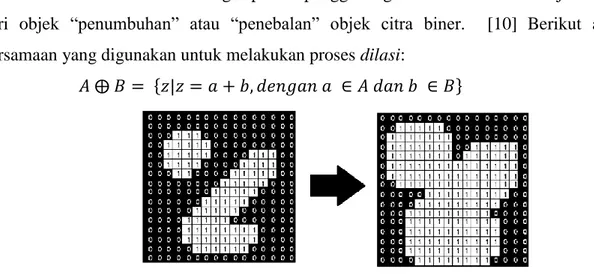
Dilasi Didefinisikan sebagai proses penggabungan titik-titik latar menjadi bagian dari objek “penumbuhan” atau “penebalan” objek citra biner. [10] Berikut adalah persamaan yang digunakan untuk melakukan proses dilasi:
* + (6)
Gambar 2. 4 Gambar biner dan Gambar hasil dilasi
Berdasarkan persamaan(6) dan gambar2.4 proses dilasi himpunan nilai 0 yang bertetangga dengan himpunan nilai 1, maka akan bernilai 1. Sintaks untuk proses dilasi :
cvDilate(src,dst,iteration=n)
CvDilate adalah fungsi untuk melakukan proses dilasi pada citra, Src adalah variabel citra input yang bertipe 8-bit (8u), dst adalah variabel citra output dengan tipe data sama dengan citra input. Iteration adalah fungsi untuk pengulangan yang dilakukan pada proses dilasi dimana n adalah jumlah proses iterasi, jika n bernilai 1 maka proses dilasi tersebut dilakukan 1 kali begitu seterusnya. Persamaan yang terdapat didalam fungsi cvDilate ini adalah sebagai berikut:
8
( ) ( ) ( ) ( ) (7) Data pada proses erosi sesuai gambar 2.5 adalah matriks yang berisi nilai 0(hitam) dan 1(putih), karena pada proses erosi input citra berupa gambar biner. Berdasarkan persamaan (9) src atau input citra yang bernilai x,y ditambah dengan nilai iterasi(x’,y’) pada erosi. Sehingga didapat nilai x,y dst citra hasil dari proses dilasi. [10][12]
Fungsi dilasi ini melebarkan gambar input citra menggunakan elemen penataan tertentu yang dapat menentukan bentuk pixel.
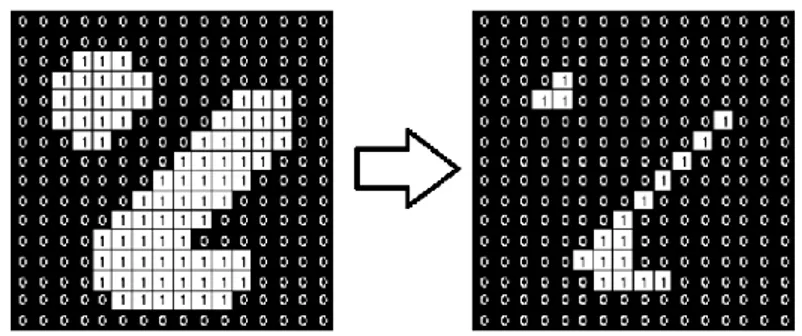
Erosi didefinisikan sebagai proses mengecilkan atau menipiskan objek pada citra biner. [10] Berikut adalah persamaan yang digunakan untuk melakukan proses erosi :
* ( ) + (8)
Gambar 2. 5 Gambar biner dan gambar hasil erosi
Berdasarkan persamaan(8) dan gambar2.5 proses dilasi himpunan nilai 0 yang bertetangga dengan himpunan nilai 1, maka akan bernilai 0. Sintaks untuk proses erosi :
cvErode(src,dst,iteration=n)
CvErode adalah fungsi untuk melakukan proses dilasi pada citra, Src adalah variabel citra input yang bertipe 8-bit (8u), dst adalah variabel citra output dengan tipe data sama dengan citra input. Iteration adalah fungsi untuk pengulangan yang dilakukan pada proses erosi ini dimana n adalah jumlah proses iterasi, jika n bernilai 1 maka proses dilasi tersebut dilakukan 1 kali begitu seterusnya. Persamaan yang terdapat didalam fungsi cvErode ini adalah sebagai berikut:
( ) ( ) ( ) ( ) (9) Data pada proses erosi sesuai gambar 2.5 adalah matriks yang berisi nilai 0(hitam) dan 1(putih), karena pada proses erosi input citra berupa gambar biner. Berdasarkan persamaan (9) src atau input citra yang bernilai x,y ditambah dengan nilai iterasi(x’,y’) pada erosi. Sehingga didapat nilai x,y dst citra hasil dari proses erosi [10][12]
9 Fungsi erosi ini mengikis gambar input citra menggunakan elemen penataan tertentu yang dapat menentukan bentuk pixel.
2.6 Metode Regresi
Metode regresi adalah suatu metode statistik untuk menyelidiki dan memodelkan hubungan antara variabel respon Y dan variabel prediktor X . Misalnya diberikan himpunan data {( X i ,Yi )}, i = 1, …, n. Secara umum hubungan antara Y dan X dapat ditulis sebagai berikut:
Yi= m(Xi) + i (10)
dengan m(x) adalah suatu fungsi regresi yang belum diketahui dan ingin ditaksir, dan i
adalah suatu variabel acak yang menggambarkan variasi Y di sekitar m(x) [7]. Penaksiran fungsi regresi dapat dilakukan dengan dua cara, yaitu secara parametrik dan nonparametrik. Pada regresi parametrik digunakan bentuk fungsi parametrik tertentu sebagai m(x). m(x) digambarkan oleh sejumlah hingga parameter yang harus ditaksir. Dalam regresi parametrik terdapat beberapa asumsi mengenai model, sehingga diperukan pengecekan akan terpenuhinya asumsi tersebut. Contoh bentuk model regresi parametrik dengan satu variabel prediktor:
Model polinomial orde ke-k :
Y = 0 + 1 X + 2 X2 + + n Xn + (11)
Pada model-model regresi tersebut parameter regresi biasanya ditaksir dengan menggunakan metode least square. Biasanya penduga least square ini diperoleh dengan meminimumkan jumlah kuadrat residual. [7]
10
BAB 3
PERANCANGAN SISTEM
Rancangan penelitian yang akan di gunakan penulis untuk menyelesaikan perumusan masalah pada tugas akhir dibagi menjadi dua bagian yaitu perancangan perangkat keras dan perancangan perangakat lunak, dimana perancangannya adalah sebagai berikut :
1. Melakukan penelitian mendeteksi objek berwarna menggunakan kamera .
2. Pembuatan kode program pada mikrokontroller untuk menggerakkan motor setelah objek berhasil di deteksi.
3. Pengujian alat dan pengambilan data.
4. Melakukan analisa pada pengujian alat dan data. 5. Pembuatan buku laporan.
3.1 Perancangan Perangkat keras
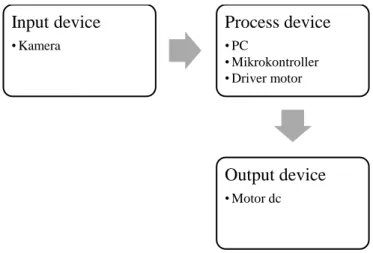
Pada perancangan ini akan dijelaskan blok diagram sistem pendeteksi objek lingkaran berwarna merah menggunakan kamera. Proses pendeteksian berawal dari kamera untuk pengkapturan gambar. Data hasil keluaran kamera kemudian dikirim menuju kontroler yang berfungsi sebagai pemrosesan data pada sistem. Setelah data tersebut di proses pada mikrokontroler akan mengirimkan sinyal kepada driver motor, yang berfungsi sebagai pengatur gerakan actuator pada motor. Secara garis besar blok diagram dapat dilihat pada gambar 3.1
Input device • Kamera Process device • PC • Mikrokontroller • Driver motor Output device • Motor dc
11
3.2 Perancangan Perangkat lunak
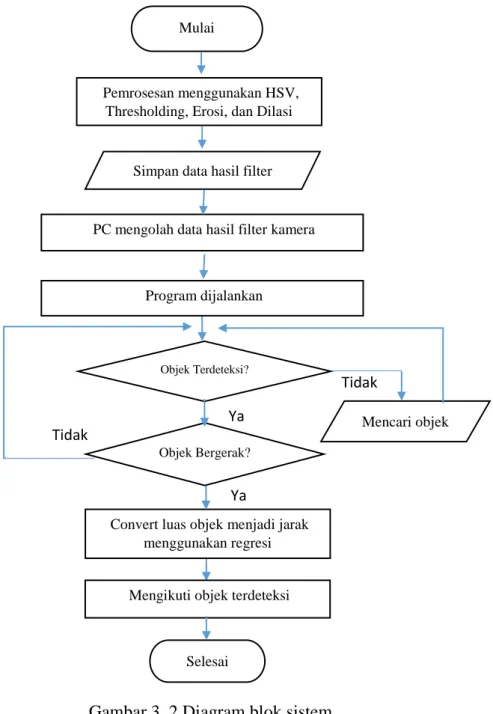
Pada perancangan perangkat lunak ini akan dijelaskan flowchart dari sistem. Alur ini menjelaskan proses pembacaan data kamera lalu di filter dan dipisahkan menggunakan filter HSV, dilasi, erosi. Data hasil filter tersebut disimpan dan akan digunakan untuk di proses pada program yang telah dibuat untuk mengikuti objek berwarna. Ketika objek berhasil di deteksi maka program akan mengkonversi luas pixel menjadi jarak dengan menggunakan metode regresi polinomial. Data jarak tersebut akan diproses di program lalu dikirimkan ke mikrokontroller berupa data serial. Selanjutnya mikrokontroller akan memproses data tersebut untuk menentukan pergerakan sistem. Flowchart dari tahap awal hingga akhir ditunjukkan diagram alur pada gambar 3.2.
Gambar 3. 2 Diagram blok sistem Simpan data hasil filter
Objek Terdeteksi? Mencari objek Objek Bergerak? Tidak Ya Ya
PC mengolah data hasil filter kamera Mulai
Selesai
Convert luas objek menjadi jarak menggunakan regresi Pemrosesan menggunakan HSV,
Thresholding, Erosi, dan Dilasi
Program dijalankan
Tidak
12
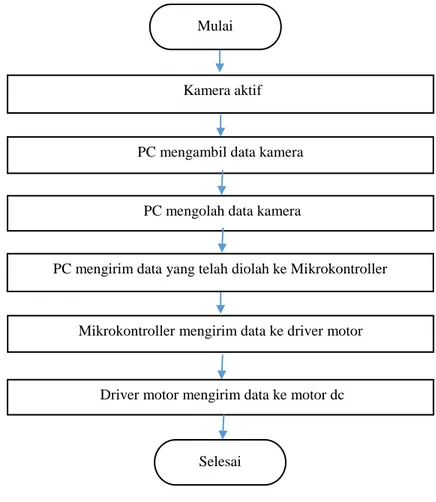
3.3 Flowchart sistem
Flowchart dibawah ini merupakan alur kerja sistem secara umum. Alur diagram
menjelaskan proses kerja yang terjadi dari program start hingga masuk ke output system yaitu motor. Flowchart system tergambar dalam diagram blok pada gambar 3.3
3.4 Instrumen penelitian
3.4.1 Alat Pengukuran
Meteran digunakan untuk mengukur jarak antara sistem dan objek benda saat melakukan pengambilan data
3.7.2 Tempat Penelitian
Dalam ruangan.
3.7.3 Parameter Alat
Kamera menggunakan satuan pixel. Jarak menggunakan satuan cm. PC mengambil data kamera
Mulai
Kamera aktif
PC mengolah data kamera
Mikrokontroller mengirim data ke driver motor PC mengirim data yang telah diolah ke Mikrokontroller
Driver motor mengirim data ke motor dc
Selesai
13
3.7.4 Tujuan Pengukuran
Tujuan dari pengukuran yaitu mengukur jarak minimum dan maksimum objek terdeteksi, mengukur pada jarak berapa sistem akan mengikuti objek dan berhenti mengikuti objek.
3.7.5 Prosedur Pengambilan Data
Pengambilan data percobaan dilakukan dalam beberapa tahap pengujian yaitu: 1. Pengujian sistem mendeteksi objek.
Pengujian ini dilakukan dengan cara mengukur objek terhadap kamera menggunakan meteran. Objek diukur pada jarak 50cm-150cm. Setiap objek terdeteksi diukur lalu dijadikan sebagai sampel data.
2. Pengujian sistem mengikuti objek.
Pengujian ini dilakukan dengan cara meletakan objek pada jarak tertentu sehingga sistem mengikuti objek.
14
BAB 4
HASIL DAN ANALISA 4.1 Colour filter
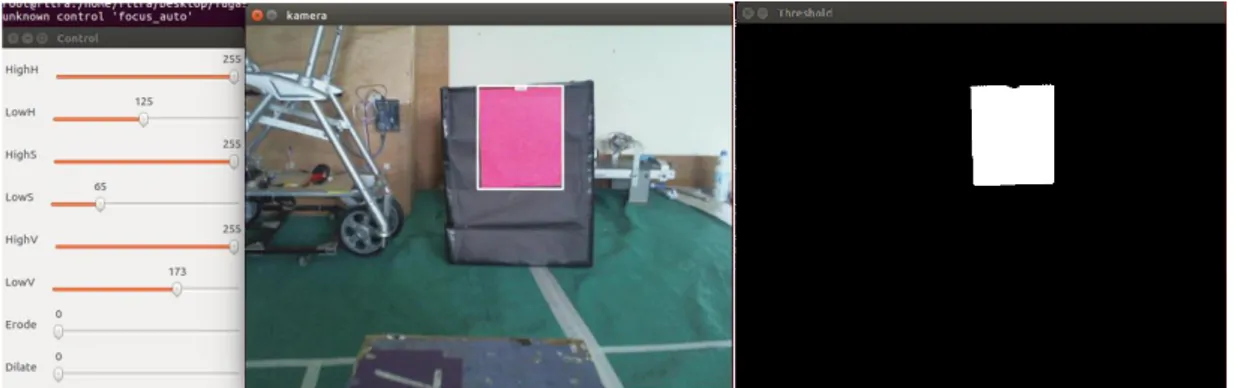
Ketika akan mendeteksi objek berwarna, terlebih dahulu harus mengatur nilai
range HSV yang akan dideteksi. Adapun tujuan dari mengatur nilai range HSV ini agar objek dapat dideteksi dan berbeda dengan lingkungan atau background di sekitarnya (proses thresholding).
Gambar 4. 1 Capture objek sebelum range HSV diatur dan hasil binerisasi
Gambar 4. 2 Mengatur nilai range Hue dan hasil binerisasi
15 Gambar 4. 4 Mengatur nilai range Value dan hasil binerisasi
Pada gambar3.3 yaitu belum ada proses thresholding(binerisasi). Pada gambar 3.4 sudah dilakukan proses thresholding dengan mencari range nilai hue untuk objek merah muda, semua warna yang masuk kedalam range nilai hue tersebut maka pixelnya akan bernilai 1 ( berwarna putih) sementara yang diluar range pixelnya bernilai 0 (berwarna hitam).
Selanjutnya proses yang terjadi dari gambar 3.4 menjadi gambar 3.5 yaitu mencari range nilai saturation untuk kemurnian warna merah muda, semua warna merah muda yang masuk ke dalam range saturation tersebut pixelnya akan bernilai 1(berwarna putih) sementara yang diluar dari range pixelnya bernilai 0 (berwarna hitam).
Terakhir proses yang terjadi dari gambar 3.5 menjadi gambar 3.6 yaitu mencari range nilai value untuk kecerahan warna merah muda, semua warna merah muda yang kecerahannya masuk kedalam range value tersebut pixelnya akan bernilai 1 (berwarna putih) sementara yang diluar dari range pixelnya akan bernilai 0 (berwarna hitam).
Dari proses thresholding didapat parameter untuk warna merah (High hue=255, low hue=125, high Saturation=255, low saturation=65, high value=255, low value=175).
Gambar 4. 5 Perbandingan dengan 3 warna dan hasil binerisasi
Pada gambar 3.7 di uji perbandingan warna yang diuji dengan warna yang memiliki range warna mendekati yaitu merah dan oren. Namun terkadang masih muncul error-error
16 kecil sehingga warna tidak terdeteksi secara sempurna, maka dari itu dilakukanlah metode morfologi(dilasi dan erosi) untuk memperkecil error sehingga warna dapat dideteksi dengan baik.
4.2 Morfologi(Dilasi dan Erosi)
Proses morfologi memiliki dampak yang besar jika diterapkan pada sistem deteksi, karena morfologi dapat menghilangkan noise-noise yang tidak diinginkan (erosi) dan dapat memperbesar ukuran objek yang terdeteksi (dilasi).
Gambar 3.8 menunjukkan hasil filter jika dilakukan pengaturan pada proses erosi. Proses yang terjadi untuk mendapatkan hasil tersebut adalah sebagai berikut. Setelah didapatkan hasil dari colour filter, pixel objek bernilai 1 yang bersebelahan dengan pixel objek bernilai 0 akan diubah menjadi 0, sehingga objek berkurang. Gambar 3.9 menunjukkan hasil filter jika dilakukan pengaturan proses dilasi. Proses yang terjadi untuk mendapatkan hasil tersebut adalah sebagai berikut. Setelah didapatkan hasil dari colour filter, pixel objek bernilai 0 yang bersebelahan dengan pixel objek bernilai 1 akan diubah menjadi 1, sehingga objek membesar. Gambar 3.10 menunjukkan hasil filter jika dilakukan pengaturan proses dilasi setelah melakukan proses erosi. Proses yang terjadi untuk mendapatkan hasil tersebut adalah gabungan dari proses dilasi dan erosi.
Gambar 4. 6 Proses Erosi pada citra
17 Gambar 4. 8 Proses Dilasi setelah proses Erosi
Setelah proses morfologi (erosi-dilasi) objek berwarna terdeteksi lebih jelas dan lebih akurat sehingga sistem dapat berjalan dengan baik.
4.3 Penggunaan metode regresi
Fungsi dari metode regresi ini ialah untuk mengubah luas objek yang terdeteksi menjadi jarak, sehingga sistemdapat bergerak sesuai jarak yang ditentukan (50cm-150cm).
18 Gambar 4. 10 sistem yang digunakan pada penelitian ini.
4.4 Pengujian jarak deteksi
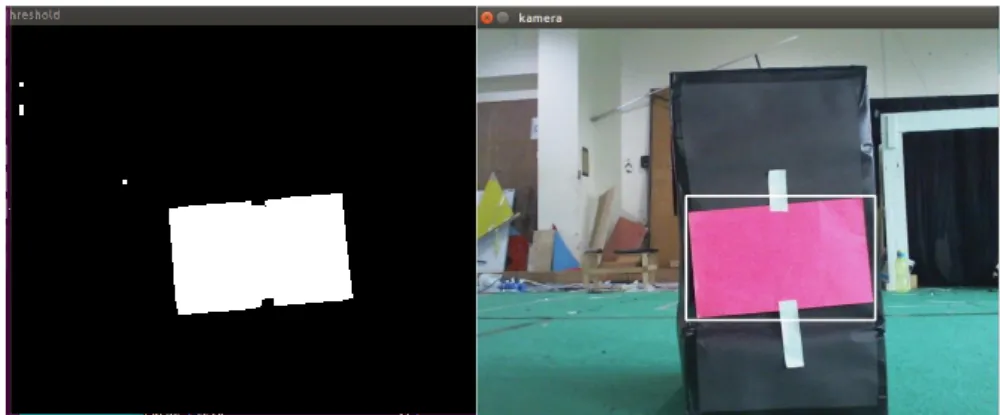
Objek ketika terdeteksi oleh kamera dapat juga dilakukan pengukuran, pengukuran ini sendiri bertujuan untuk melihat seberapa dekat dan jauh objek dapat dideteksi oleh kamera dan apakah objek terdeteksi atau tidak. Pada penyajian data ini penulis akan menampilkan data berupa terdeteksinya objek oleh kamera berdasarkan posisi objek tersebut. Posisi objek tersebut terdiri atas kiri, tengah, dan depan. Masing-masing posisi objek ketika terdeteksi akan menghasilkan aksi yang berbeda juga.
(A) (B) (C)
(D) (E) (F)
Gambar 4. 11 Pendeteksian objek diposisi tengah frame (A)jarak 50cm, (B)jarak60cm, (C)jarak 70cm, (D)jarak 80cm, (E)jarak 120cm, (F)jarak 180cm
19
(A) (B) (C)
(D) (E) (F)
Gambar 4. 12 pendeteksian objek diposisi kanan frame (A)jarak 50cm, (B)jarak60cm, (C)jarak 70cm, (D)jarak 80cm(E)jarak 120cm,(F)jarak 180cm
(A) (B) (C)
(D) (E) (F)
Gambar 4. 13 Pendeteksian objek diposisi kiri frame (A)jarak 50cm, (B)jarak60cm, (C)jarak 70cm, (D)jarak 80cm(E)jarak 120cm,(F)jarak 180cm
Gambar 4.11 menampilkan gambar deteksi objek berwarna merah muda saat berada ditengah frame, objek yang berhasil dideteksi diukur dengan menggunakan meteran
20 pada jarak 50cm hingga 180cm. Gambar 4.12 menampilkan gambar deteksi objek berwarna merah muda saat berada dikanan frame, objek yang berhasil dideteksi diukur dengan menggunakan meteran pada jarak 50cm hingga 180cm. Dan Gambar 4.13 menampilkan gambar deteksi objek berwarna merah muda saat berada dikiri frame, objek yang berhasil dideteksi diukur dengan menggunakan meteran pada jarak 50cm hingga 180cm.
Tabel 4.1 keberhasilan deteksi objek berdasarkan jarak
Jarak (cm) kiri Kanan Tengah Jumlah (pixel) 40 Tidak Tidak Tidak -
50 Terdeteksi Terdeteksi Terdeteksi 42600 60 Terdeteksi Terdeteksi Terdeteksi 30102 70 Terdeteksi Terdeteksi Terdeteksi 22500 80 Terdeteksi Terdeteksi Terdeteksi 17556 120 Terdeteksi Terdeteksi Terdeteksi 8190 150 Terdeteksi Terdeteksi Terdeteksi 5402 190 Tidak Tidak Tidak -
Gambar 4. 14 Grafik jumlah pixel terhadap jarak real.
Dari gambar 4.14 menjelaskan tentang luas area benda terhadap jarak real. Jika dilihat secara keseluruhan grafik menurun secara berkala pada pada jarak 50cm terdeteksi luas objek yaitu 42600 pixel, lalu pada jarak 60cm terdeteksi luas objek yaitu 30102 pixel,
50; 42600 60; 30102 70; 22500 80; 17556 120; 8190 150; 5402 y = 0,0015x4 - 0,6545x3 + 108,91x2 - 8254,1x + 255597 0 5000 10000 15000 20000 25000 30000 35000 40000 45000 0 50 100 150 200 (ju m lah p ixel ) Jarak real (cm)
Luas Area terhadap jarak real
jarak ; pixel Poly. (jarak ; pixel)
21 pada jarak 80cm tedeteksi luas objek yaitu 17556 pixel, pada jarak 120cm terdeteksi luas objek yaitu 8190 pixel, dan terakhir pada jarak 150cm terdeteksi luas objek yaitu 5402. Nilai-nilai yang telah didapat dari pengujian sampel deteksi jarak digunakan untuk mencari nilai polinomial dengan cara memasukkan nilai jarak dan jumlah pixel kedalam rumus menggunakan mic.excel. setelah didapat fungsi persamaannya seperti gambar 4.14, maka persamaan tersebut dimasukkan kedalam program yang nantinya akan diolah menjadi jarak pengukuran.
Tabel 4.2 Perbandingan jarak terukur dengan jarak real Jarak real (cm) Jarak pengukuran Error (%)
50 49,1 1,8 60 61.3 2,16 70 71,8 2,5 80 82,4 3 90 90,8 0,8 100 99,4 0,6 110 107,6 2,4 120 114,3 4,75 130 120,4 7,3 140 128,6 8,14 150 136,8 8,8 Rata-rata error 3,84
Tabel 4.2 menjelaskan perbandingan antara jarak real dengan jarak hasil pengukuran menggunakan metode regresi dengan jarak ukur antara 50-150cm, dari hasil pengukuran didapat nilai rata-rata error yaitu sebesar 3,84%. Error ini disebabkan oleh kurang tepatnya pendekatan garis pada jarak real dan garis polinomial pada gambar 4.14.
4.5 Pengujian Arah putar motor ketika objek terdeteksi
Pada bagian 4.1 telah disebutkan bahwa ketika objek telah terdeteksi maka akan melakukan aksi, aksi yang dimaksudkan ini adalah arah putar pada motor yang menyebabkan sistem bergerak mengikuti objek yang telah dideteksi oleh kamera. Untuk membuat arah gerakan ini, penulis membagi frame menjadi 3 bagian yaitu bagian kiri, kanan, dan tengah, masing-masing bagian ini mempunyai tujuan tersendiri. Frame dibagi
22 dengan cara memberikan fungsi if yang berisikan range pada nilai x frame atau horizontal frame.
Gambar 4. 15 program untuk frame bagian kiri
Pada gambar 4.15 menampilkan program untuk membaca frame dibagian kiri dengan memberi range nilai x frame yaitu antara 0 hingga 213.3. Ketika objek terdeteksi maka motor kanan akan berputar ClockWise sehingga robot bergerak belok ke arah kiri.
Gambar 4. 16 program untuk frame bagian kanan
Pada gambar 4.16 menampilkan program untuk membaca frame dibagian kanan dengan memberi range nilai x frame yaitu antara 426.6 hingga 640. Ketika objek terdeteksi maka motor kiri akan berputar CounterClockWise sehingga robot bergerak belok ke arah kanan.
Gambar 4. 17 program untuk frame bagian tengah
Pada gambar 4.17 menampilkan program untuk membaca frame dibagian tengah dengan memberi range nilai x frame yaitu antara 213.3 hingga 426.6. Ketika objek terdeteksi maka robot akan bergerak maju. Untuk lebih jelasnya dapat dilihat pada gambar4.8, gambar4.9, dan gambar 4.10.
23
(A) (B)
Gambar 4. 18 (A)Objek terdeteksi disebelah kiri, maka (B) robot akan belok kiri
(A) (B)
Gambar 4. 19 (A)Objek terdeteksi disebelah kanan, maka (B)robot akan belok kanan
(A) (B)
Gambar 4. 20 (A)Objek terdeteksi ditengah, maka (B)robot akan maju
24 Sistem diberikan jarak minimal terhadap objek agar sistem dan objek tidak saling berbenturan satu sama lain. Sistem akan selesai ketika Sistem dapat mendeteksi objek dan mengikuti objek dengan jarak minimal yang diatur. Pada percobaan kali ini penulis memberikan jarak minimal terhadap objek yaitu 50cm, jadi ketika robot menuju objek yang dideteksi, robot otomatis berhenti ketika jarak 50cm atau kurang dari 50cm.
Tabel 4.3 Keberhasilan mengikuti objek berdasarkan jarak Posisi frame
Jarak (cm) kiri Tengah Kanan
40 Gagal Gagal Gagal
50 Gagal dan Berhasil Gagal dan Berhasil Gagal dan Berhasil 60 Berhasil Berhasil Berhasil 70 Berhasil Berhasil Berhasil 80 Berhasil Berhasil Berhasil 90 Berhasil Berhasil Berhasil 100 Berhasil Berhasil Berhasil 110 Berhasil Berhasil Berhasil 120 Berhasil Berhasil Berhasil 130 Berhasil Berhasil Berhasil 140 Berhasil Berhasil Berhasil 150 Berhasil Berhasil Berhasil
160 Gagal Gagal Gagal
Tabel 4.3 menjelaskan tentang keberhasilan sistem dalam mengikuti objek pada jarak 50-150cm. Sistem akan mengikuti objek ketika objek dideteksi. pada tabel 4.3 didapat pada jarak 50cm sistem tidak berhasil mengikuti objek dari beberapa kali percobaan dikarenakan jarak terukur yang didapat dari metode regresi bernilai 49,1, dan untuk jarak sisanya berhasil. Sistem diatur mengikuti objek jika jarak terukur lebih dari 50, jika jarak kurang dari 50 sistem otomatis akan berhenti bergerak.
25
BAB 5
KESIMPULAN DAN SARAN 5.1 Kesimpulan
1. Sistem dapat mendeteksi objek berwarna merah muda pada jarak 50-180cm 2. Sistem dapat mengikuti objek 60-150cm.
5.2 Saran
Untuk penelitian lebih lanjut perlu ditambahkan beberapa saran sebagai berikut : 1. Mengembangkan program filter warna agar dapat mendeteksi objek dalam
kondisi cahaya gelap maupun terang.
2. Menambahkan kontrol kecepatan motor agar sistem dapat berjalan lebih baik lagi.
26
DAFTAR PUSTAKA
[1] Mindiar, Nugroho hary. 2007. Kamera Pendeteksi Gerak Menggunakan MATLAB 7.1(Skripsi) Jakarta: Universitas Guna Darma.
[2] Simangunsong, David. 2016 Optimasi Sensor Kamera Pada Proses Identifikasi Warna Dengan Pengolahan Citra menggunakan Design of Experiment (Skripsi), Bandung: Universitas Telkom.
[3] Rahman, Maulana. Pengembangan Robot Rubik dengan identifikasi warna
menggunakan Sensor Kamera (Skripsi) Surabaya: Institut Teknologi Sepuluh
November.
[4] Soebhakti, Hendawan. Pengukuran Jarak berdasarkan Ekstraksi Nilai Hue pada
Citra Depth menggunakan Sensor Kinect (paper) Batam: Politeknik Negeri Batam.
[5] Kolkur, S. 2017. Human Skin Detection Using RGB, HSV, and YCBCr color Model, India : Atlantis press.
[6] New Mexico Tech. “Introduction to Color Theory”. Internet: http://infohost.nmt.edu/tcc/help/pubs/colortheory/web/hsv.html. , 7 Juni 2017. [7] Hardle, Wolfgang. 1990. Smoothing Techniques With Implementation in S. New
York: Springer Verlag.
[9] N Senthilkumaran. 2016 Image Segmentation by Using Thresholding Techniques for Medical Images, India: Gandhigram Rural Institute.
[10] Anggraini P, Diah. Dkk “Segmentasi Citra Digital Ikan Menggunakan Metode Thresholding dan K-Means” (paper).
[11] Purnomo, Mauridhi Hery dan Muntasa, Arif. 2010 Konsep Pengolahan Citra Digital dan Ekstraksi Fitur. Edisi Pertama, Graha Ilmu, Yogyakarta.
[12] Wirayuda, Tjokarda Agung Budi Pemanfaatan operasi Morphology untuk Proses Pendeteksian Sisi pada Pengolahan Citra Digital, Bandung: Sekolah Tinggi Teknologi Telkom
28
BIOGRAFI PENULIS
Nama : Fitrah Triatmojo
Tempat/Tanggal lahir : Batam/25 Februari 1996
Agama : Islam
Alamat Rumah : Kav. Patam Lestari Blok D no.4 RT.04 RW.01 Kec.Sekupang. Batam. E-mail : [email protected] Riwayat Pendidikan : SDN007 Tiban Indah SMPN20 Batam SMAN12 Batam