BAB II
TINJAUAN PUSTAKA
2.1. Teori Penunjang
2.1.1 Continuously Variable Transmissions ( CVT )
Continuously Variable Transmissions ( CVT ) merupakan sistem transmisi yang sangat sederhana dibandingkan sistem transmisi lainnya. Penampilan yang baik serta unggul dalam penggunaan, karena CVT sama sekali tidak mempergunakan roda gigi sebagai sistem penggerak sehingga saat bergerak dan berhenti jauh lebih lembut. Selain itu tidak adanya kehilangan tenaga saat pemindahan gigi, dan mempunyai akselerasi sangat cepat. Dibanding dengan perseneling otomatis manapun sistem ini tetap unggul. Perseneling otomatis memiliki keterlambatan saat perpindahan kecepatan, walaupun tidak kehilangan tenaga pendorong bagi mobil.
Secara teknis sistem CVT sangat sederhana, yakni perseneling dilengkapi dengan 2 puli yang berbentuk kerucut dan sabuk baja steel belt. Salah satu puli ini mempunyai lubang dan yang lainnya berbentuk kerucut. Ini berguna untuk merubah diameter puli yang berkaitan dengan sabuk baja. Diameter tersebut berubah bila puli yang berbentuk kerucut masuk atau keluar dari puli yang berlubang. Bila puli masuk maka diameter gabungan kedua puli menjadi besar dan sebaliknya. Sabuk baja yang ada pada puli akan terdorong keatas atau kebawah sesuai dengan perubahan diameter puli dan tetap mencengkeram kuat di puli. Perubahan diameter di puli menghasilkan perubahan tenaga secara terus menerus, tanpa terjadi kehilangan tenaga saat perubahan, baik itu dari kecepatan rendah ke kecepatan tinggi, maupun sebaliknya, dan ini yang sangat diharapkan pemakai mobil.
Untuk mengubah diameter, dalam arti mengubah torsi mesin yang akan disalurkan ke roda, dilakukan secara elektronis. Kecepatan rendah dan tenaga besar, seperti halnya gigi satu pada sistem manual, diperoleh dengan memperkecil diameter puli yang dihubungkan dengan sistem kopling, serta memperbesar diameter puli yang berhubungan dengan diferensial (gardan). Semakin cepat mobil bergerak, semakin besar pula diameter puli yang dihubungkan dengan sistem kopling, dan semakin kecil diameter puli lawan. Untuk setiap pergerakan sabuk baja yang dirancang
khusus, diameter tersebut terus menerus menggigit pada puli-puli ini dan praktis hampir tidak ada slip yang menyebabkan hilangnya tenaga. Sabuk yang terbuat dari baja disamping kuat, tidak menyebabkan slip, juga tahan lama, sehingga cocok untuk dipergunakan. Selain itu praktis tanpa perawatan. Keuntungan lain karena sedikit bagian yang bergerak, maka praktis mengurangi energi yang terbuang dan mengurangi suara diperseneling.
Gambar 2.1 Mekanisme konstruksi umum CVT.
Efisiensi torsi yang dihasilkan mesin didukung pula oleh pemakaian kopling khusus yang mempergunakan sabuk elektromagnetis serta dikendalikan dan dipantau oleh mikrocomputer. Sehingga dengan torsi yang kecil dapat menghasilkan traksi yang besar. Sama seperti perseneling otomatis, tetapi sistem ini dilengkapi tingkat kecepatan khusus untuk keperluan akselerasi yang lebih besar, serta pengereman dengan mesin yang lebih baik.
Pengendalian CVT jauh lebih mudah dari perseneling otomatis. Dengan menggeser puli kekanan dan kekiri dengan sistem kontrol elektronik maka ratio transmisi dapat diatur sesuai yang diinginkan. Disamping itu jumlah tingkat transmisi juga dapat diatur sesuai dengan yang diinginkan. Tenaga mesin sedikit sekali terbuang akibat pemakaian CVT sehingga pemakaian bahan bakarpun akan lebih irit.
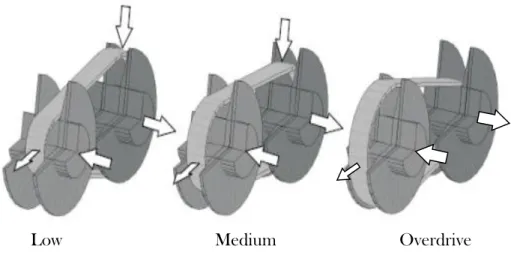
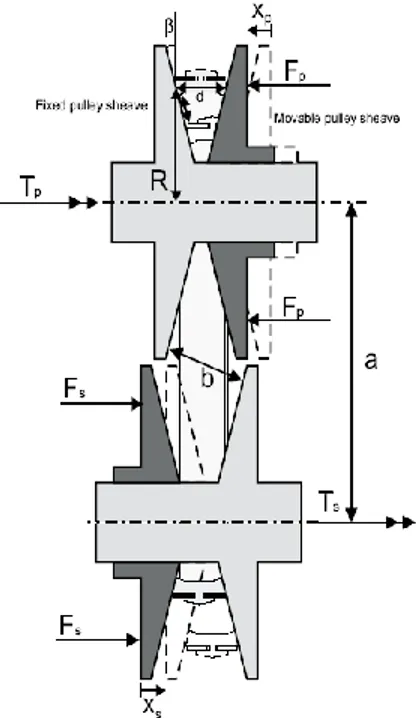
Secara lebih rinci salah model mekanis dari puli dan belt dengan ratio paling tinggi untuk sistem transmisi tanpa roda gigi dapat dilihat pada gambar 2.2.
Gambar 2.2 Mekanisme belt dan puli penggerak pushbelt dari CVT.
Gambar 2.3
Untuk ratio CVT dihitung berdasarkan perbandingan 2 1 2 1 2 1
2
2
n
n
n
n
i
CVT
...…...(2.1)dimana : n1 putaran puli inputan (primer). n2= putaran puli output (sekunder). 2.1.2. Slip Faktor
Variabel lain yang perlu diperhitungkan adalah slip faktor (λ) di definisikan ( Bonsen, 2003): Slip : 1 o p s r
...…………..………..( 2.2 ) 1 2r
r
r
o
...( 2.3 ) Dimana : λ = Slip faktorωs = kecepatan sudut dari puli sekunder.
ωp = Kecepatan sudut dari puli primer.
ro = rasio geometri 2.1.3. Torsi
Torsi yang pada CVT dapat dihitung dengan rumus :
P T ………...……….. (2,4) n P T 2 ……….. (2,5)
Dimana : T = Torsi (Nm) P = Daya mesin (watt) n = Putaran (rpm)
2.1.4. Kontroller
Kontroller merupakan komponen sistem yang berfungsi mengolah sinyal umpan balik dan referensi menjadi sinyal kontrol sedemikian rupa sehingga performansi dari sistem yang dikendalikannya sesuai dengan spesifikasi performansi yang diinginkan.
2.1.5. Mikrokontroler
Mikrokontroler jika diterjemahkan secara harfiah, berarti pengendali yang berukuran mikro. Sekilas mikrokontroler hampir sama dengan mikroprosesor. Namun mikrokontroler memiliki banyak komponen yang terintegrasi di dalamnya, misalnya timer/counter. Sedangkan pada mikroprosesor, komponen tersebut tidak terintegrasi.
Mikroprosesor umumnya kita jumpai pada komputer dimana tugas dari mikroprosesor adalah untuk memproses berbagai macam data input maupun output dari berbagai sumber. Mikrokontroler lebih sesuai untuk tugas-tugas yang lebih spesifik. Ciri khas mikrokontroler lainnya, antara lain:
1. Tertanam (atau embedded) dalam beberapa piranti (umumnya merupakan produk konsumen) atau yang dikenal dengan istilah embedded system atau embedded controller.
2. Terdedikasi untuk satu macam aplikasi saja.
3. Hanya membutuhkan daya yang rendah (low power), bisa bandingkan dengan komputer yang bisa mencapai 50 watt lebih.
4. Memiliki beberapa keluaran maupun masukan yang terdedikasi, untuk tujuan atau fungsi-fungsi khusus.
2.1.6. Arduino Board
Arduino Board adalah kit elektronik atau papan rangkaian elektronik open source yang didalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Mikrokontroler itu sendiri adalah chip atau IC (integrated circuit) yang bisa diprogram menggunakan komputer. Tujuan menanamkan program pada mikrokontroler adalah agar rangkaian elektronik dapat membaca input, memproses input tersebut dan kemudian menghasilkan output sesuai yang diinginkan.
Arduino dapat digunakan ‘mendeteksi’ lingkungan dengan menerima masukan dari berbagai sensor (misal: cahaya, suhu, inframerah, ultrasonik, jarak, tekanan, kelembaban) dan dapat ‘mengendalikan’ peralatan sekitarnya (misal: lampu, berbagai jenis motor dan lainnya).
Gambar 2.4 Arduino Board
Kegunaan Arduino tergantung kepada kita yang membuat program. Arduino bisa digunakan untuk mengontrol LED, bisa juga digunakan untuk mengontrol helikopter.
1. Kabel USB Arduino Board
USB Arduino Board adalah kabel USB yang disambungkan ke komputer atau notebook. Berfungsi untuk mengirimkan program ke Arduino dan juga sebagai port komunikasi serial.
2. Input / Output Digital
Input/Output Digital atau digital pin adalah pin-pin untuk menghubungkan Arduino dengan komponen atau rangkaian digital. Misalnya kalau ingin membuat LED berkedip, LED tersebut bisa dipasang pada salah satu pin I/O digital dan ground. Komponen lain yang menghasilkan output digital atau menerima iput digital bisa disambungkan ke pin-pin ini.
3. Input Analog
Input Analog atau analog pin adalah pin-pin yang berfungsi untuk menerima sinyal dari komponen atau rangkaian analog. Misalnya dari sensor suhu dan sensor cahaya.
4. Catu Daya
Pin-pin catu daya adalah pin yang memberikan tegangan untuk komponen atau rangkaian yang dihubungkan dengan Arduino. Pada bagian catu daya ini terdapat juga pin Vin dan Reset. Vin digunakan untuk memberikan tegangan langsung kepada Arduino tanpa melalui tegangan USB atau adaptor. Reset adalah pin untuk memberikan sinyal reset melalui tombol atau rangkaian eksternal.
5. Baterai / Adaptor
Soket baterai atau adaptor digunakan untuk menyuplai Arduino dengan tegangan dari baterai/adaptor 9V pada saat Arduino sedang disambungkan ke ksomputer melalui USB, Arduino mendapatkan suplai tegangan dari USB, jadi tidak perlu memasang baterai /adaptor saat memprogram Arduino.
2.1.7. Komputer / Notebook
Karena program yang dijalankan oleh Arduino Board tidak membutuhkan spesifikasi suatu komputer yang tinggi maka hal ini memberi kemudahan bagi user untuk mengoperasikannya. Program Arduino dapat berjalan dengan prosessor paling lambat sekalipun. Inilah yang menyebabkan user diberikan kemudahan dalam segi pemprogramnya.
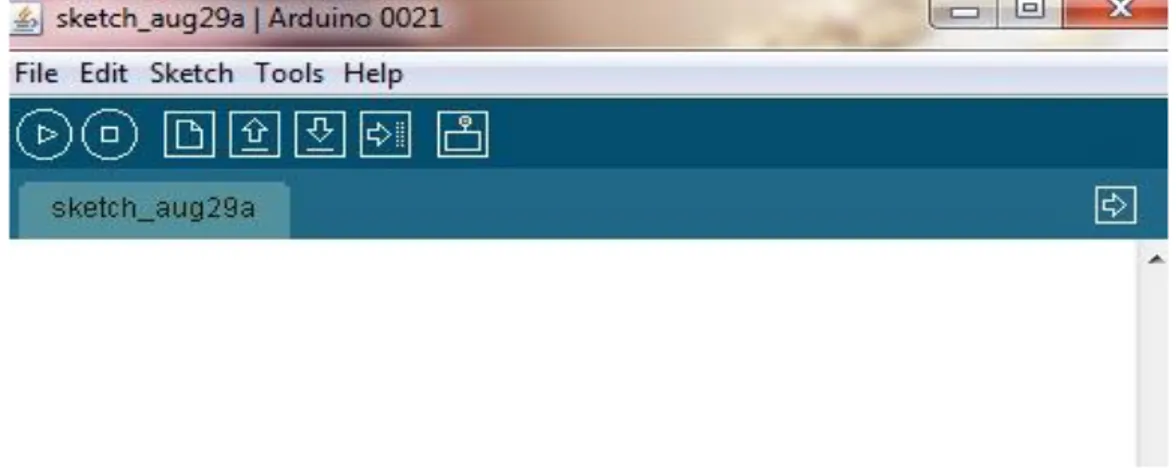
2.1.8. Software IDE Arduino Board
Software Arduino ini diciptakan untuk para pemula bahkan yang tidak memiliki basic bahasa pemrograman sama sekali karena menggunakan bahasa C++ yang telah dipermudah melalui library. Arduino menggunakan Software Processing yang digunakan untuk menulis program kedalam Arduino. Processing sendiri merupakan penggabungan antara bahasa C++ dan Java.
Gambar 2.5 Software IDE Arduino Board
Software Arduino ini dapat di-install di berbagai operating system (OS) seperti : LINUX, Mac OS, Windows. Software IDE Arduino terdiri dari 3 bagian yaitu :
1. Editor program : berfungsi untuk menulis dan mengedit program dalam bahasa processing. Listing program pada Arduino disebut sketch.
2. Compiler : adalah modul yang berfungsi untuk mengubah bahasa processing (kode program) kedalam kode biner karena kode biner adalah satu-satunya bahasa program yang dipahami oleh mikrokontroler.
3. Uploader : adalah modul yang berfungsi untuk memasukkan kode biner kedalam memori mikrokontroler.
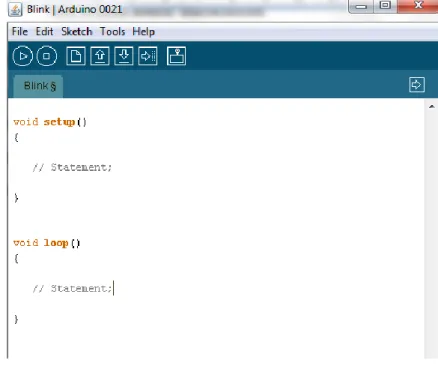
Struktur perintah pada Arduino secara garis besar terdiri dari 2 bagian yaitu void setup dan void loop. Void setup berisi perintah yang akan dieksekusi hanya satu kali sejak Arduino dihidupkan sedangkan void loop berisi perintah yang akan dieksekusi berulang-ulang selama Arduino dinyalakan. Dapat dilihat pada gambar berikut ini :
Gambar 2.6 Struktur Dasar Bahasa Pemrograman Arduino
2.1.9. Sensor Putaran dengan Rotary Encoder
Rotary encoder adalah divais elektromekanik yang dapat memonitor gerakan dan posisi. Rotary encoder umumnya menggunakan sensor optik untuk menghasilkan serial pulsa yang dapat diartikan menjadi gerakan, posisi, dan arah. Sehingga posisi sudut suatu poros benda berputar dapat diolah menjadi informasi berupa kode digital oleh rotary encoder untuk diteruskan oleh rangkaian kendali. Rotary encoder umumnya digunakan pada pengendalian motor drive.
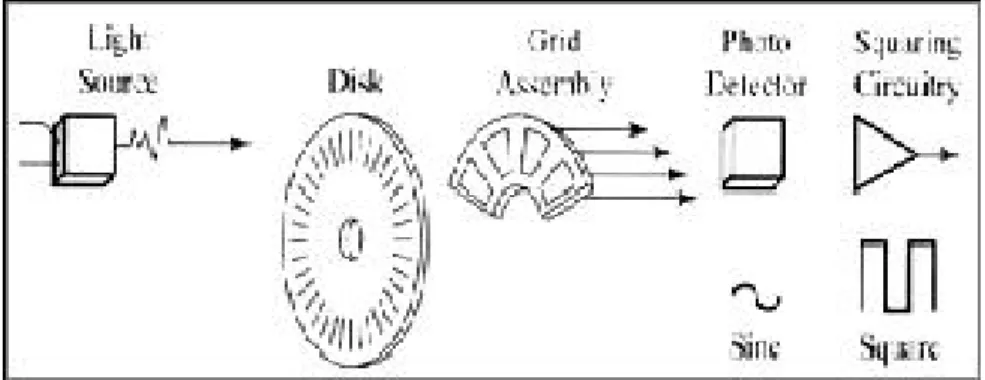
Rotary encoder tersusun dari suatu piringan tipis yang memiliki lubang-lubang pada bagian lingkaran piringan. LED ditempatkan pada salah satu sisi piringan sehingga cahaya akan menuju ke piringan. Di sisi yang lain suatu photo-transistor diletakkan sehingga photo-transistor ini dapat mendeteksi cahaya dari LED yang berseberangan. Piringan tipis tadi dikopel dengan poros motor, atau divais berputar lainnya yang ingin kita ketahui posisinya, sehingga ketika motor berputar piringan juga akan ikut berputar. Apabila posisi piringan mengakibatkan cahaya dari LED dapat mencapai transistor melalui lubang-lubang yang ada, maka photo-transistor akan mengalami saturasi dan akan menghasilkan suatu pulsa gelombang
persegi. Gambar 2.7 menunjukkan bagan skematik sederhana dari rotary encoder. Semakin banyak deretan pulsa yang dihasilkan pada satu putaran menentukan akurasi rotary encoder tersebut, akibatnya semakin banyak jumlah lubang yang dapat dibuat pada piringan menentukan akurasi rotary encoder tersebut.
Gambar 2.7. Blok penyusun rotary encoder
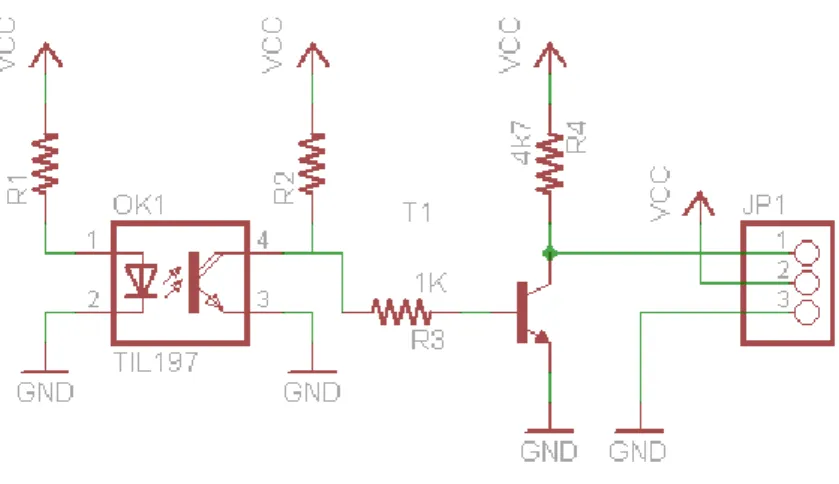
Rangkaian penghasil pulsa (Gambar 2.7) yang digunakan umumnya memiliki output yang berubah dari +5V menjadi 0.5V ketika cahaya diblok oleh piringan dan ketika diteruskan ke photo-transistor. Karena divais ini umumnya bekerja dekat dengan motor DC maka banyak noise yang timbul sehingga biasanya output akan dimasukkan ke low-pass filter dahulu. Apabila low-pass filter digunakan, frekuensi cut-off yang dipakai umumnya ditentukan oleh jumlah slot yang ada pada piringan dan seberapa cepat piringan tersebut berputar, dinyatakan dengan:
60
n
S
f
w c
……….……..…… (2.6)Dimana fc adalah frekuensi cut-off filter, sw adalah kecepatan piringan dan n adalah jumlah slot pada piringan.
Gambar 2.8 Rangkaian tipikal penghasil pulsa pada rotary encoder
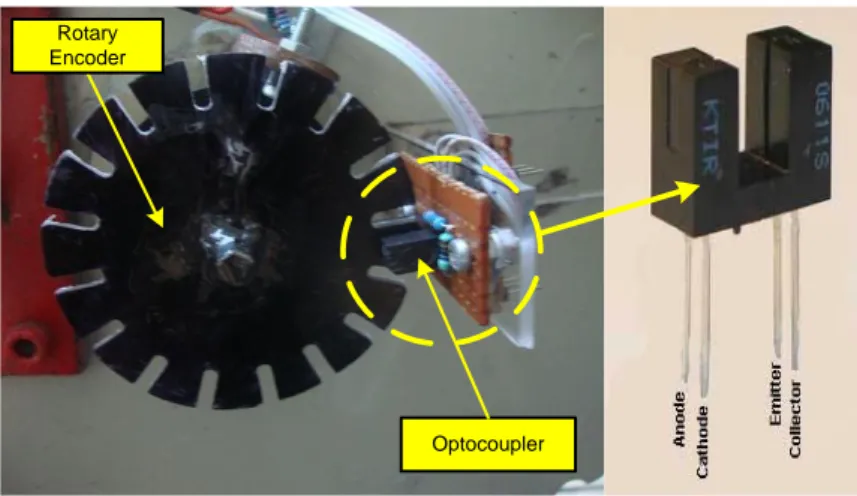
Rotary Encoder
Optocoupler
Gambar 2.10 Konstruksi Rotary Encoder untuk sensor kecepatan
Kecepatan pada rotary encoder dapat di hitung dengan rumus :
Kecepatan = jumlah pulsa/periode sampling x 60/jumlah lubang piringan. 2.1.10. Potensiometer
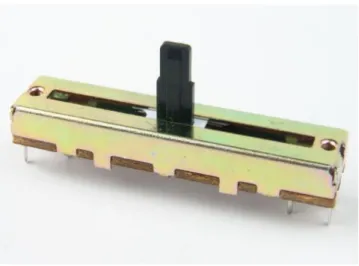
Potensiometer merupakan komponen elektronika dari keluarga resistor hanya saja nilai resistansinya tidak konstan dan dapat diubah-ubah sesuai dengan kebutuhan (variable resistor). Jenis potensiometer yang digunakan adalah tipe sliding atau geser yang maksimum nilai resistansinya adalah sebesar 20 KΩ (Kilo Ohm). Karena data yang dikeluarkan dari potensiometer ini berupa data analog (berupa tegangan) maka perlu ADC (Analog Digital Converter) supaya data bisa diolah oleh mikrokontroler. Berikut ini adalah gambar potensiometer tipe sliding :
Gambar 2.12 Bentuk Fisik Potensiometer Tipe Geser (Sliding)
2.1.11 Driver Motor DC
Driver motor DC merupakan media penghubung antara mikrokontroler dengan motor DC. Driver motor ini berfungsi sebagai aktuator motor DC dan juga sebagai pemisah supply / sumber tegangan motor DC sebesar 12 volt dengan supply /sumber tegangan mikrokontroler sebesar 5 volt. Kerja dari driver motor ini adalah sebagai pembalik arah putaran motor DC yang menggunakan prinsip bridge H dengan transistor 2955 dan 3055. Berikut ini adalah gambar skema rangkaian dan bentuk fisik dari driver motor DC.
Gambar 2.14 Driver Motor DC
2.1.12 Motor DC
Motor DC (direct current) merupakan perangkat yang berfungsi merubah besaran listrik menjadi besaran mekanik. Prinsip kerja motor didasarkan pada gaya elektromagnetik yang dibangkitkan dari sumber tegangan arus searah. Motor arus searah digunakan dimana kontrol torsi dan kecepatan dengan rentang yang lebar diperlukan untuk memenuhi kebutuhan aplikasi. Motor DC pada umumnya ada yang menggunakan magnet permanen dan menggunakan magnet listrik tergantung dari kebutuhan aplikasi yang digunakan. Arah putaran motor DC magnet permanen ditentukan oleh arah arus yang mengalir pada kumparan jangkar. Salah satu keistimewaan motor DC ini adalah kecepatannya dapat dikontrol dengan mudah. Kecepatan motor magnet permanen berbanding langsung dengan harga tegangan yang diberikan pada kumparan jangkar. Semakin besar tegangan yang diberikan pada jangkar, semakin tinggi pula kecepatan motor.
Motor DC terdapat dalam berbagai ukuran dan kekuatan, masing- masing di disain untuk keperluan yang berbeda-beda namun secara umum memiliki fungsi dasar yang sama yaitu mengubah energi elektrik menjadi energi mekanik. Secara sederhana cara kerja motor DC seperti cara kerja motor listrik pada umumnya yaitu
Bila arus mengalir pada kumparan, arus akan menghasilkan medan magnet sendiri yang arahnya berubah-ubah terhadap arah medan magnet permanen / buatan sehingga menimbulkan gaya tarik menarik atau tolak menolak yang akhirnya menjadi putaran.
Motor DC tersedia dalam banyak ukuran dan variasi bentuk, salah satunya adalah motor DC yang sudah dilengkapi dengan gearbox sehingga torsi yang dihasilkan akan lebih besar daripada keluaran motor DC yang belum dilengkapi gearbox. Bentuk Fisik Motor DC yang dilengkapi dengan gearbox ditunjukkan pada gambar 2.15 berikut ini :
Gambar 2.15 Bentuk Fisik dari Motor DC yang dilengkapi dengan Gearbox
2.2. Studi Hasil Penelitian Sebelumnya
CVT adalah sistem transmisi yang menghubungkan antara mesin penggerak dengan beban yang mana rasio kecepatannya dapat diatur. Tujuan dari pengaturan ini umumnya untuk mendapatkan matchingperformance yang lebih baik. Aplikasi CVT pada motor penggerak dapat menurunkan konsumsi bahan bakar yang cukup significant sampai 25%. Dalam penelitian ini peneliti merancang kontroler CVT, yang mana plant yang dikendalikan ini diasumsikan sebagai variable transmisi pada kendaraan.Dengan asumsi tersebut dapat diharapkan bahwa hasil penelitian ini nantinya dapat diupayakan untuk diimplementasikan pada transimisi dengan tujuan dapat memperbaiki performance.
Widjokongko (2009) Pada penelitian ini dirancang sistem CVT menggunakan sistem loop tertutup dengan menggunakan mode elektrik secara proporsional untuk mengendalikan actuator Fork Screw Push Belt, dengan bantuan perhitungan ideal dari CVT menggunakan software MATLAB dan pengujian menggunakan software DELPHI. Analisa yang diharapkan antara analisa ideal dengan aktual ditunjukan dengan effisensi sistem kendali yang dicapai. Hasil CVT dengan 2 pengerak mampu menghasilkan meningkatkan effisien ratio CVT menjadi 53.056 % sehingga mampu mengurangi faktor slip, sedangkan waktu steady state kurang dari 18.07 detik yang mampu mengurangi error menjadi 8.8 rad/s ~ 3.22 %.
Herlambang (2010) Pada penelitian ini menggunakan sensor Strain Gauge sebagai sensor gaya untuk meningkatkan kinerja sistem CVT . Strain gauge yang dipasang untuk sensor gaya pada push belt fork screw sistem CVT yang telah bekerja dan mewakili nilai Clamping force yang terjadi pada fork screw. Hasilnya ditunjukan berupa voltase Output akibat gaya pencekaman pada Sensor gaya push belt fork screw antara pulley primer dan sekunder. Dengan penggunaan sensor Strain Gauge sistem CVT mengalami perbaikan hingga 52.9% dan kinerja sistem transmisi dapat menjadi lebih baik, yang ditunjukkan pada kondisi tertentu nilai slip putaran yang yang terjadi yaitu 0.044 dan Error Torsi yang terjadi dapat berkurang hingga 18.5 %.
Hartawan (2011) mengimplementasikan sistem kendali loop tertutup menggunakan kontrol rotasi putaran per menit (RPM) sebagai inputan dalam mengatur kinerja motor DC 12 volt untuk merubah rasio secara otomatis. Implementasi Rancangan Sistem Kontrol RPM pada prototipe ECVT bekerja dengan baik, sehingga didapatkan hasil perubahan rasio ECVT secara otomatis sesuai dengan rpm pada mesin. Hasil perbandingan antara antara simulasi LabVIEW dengan Impementasi pada prototipe ECVT diperoleh kinerja ECVT meliputi : Pada rasio 0,680 pada ECVT diperoleh slip sebesar 55,56% dan efisiensi rasio sebesar 44,44%, Efisiensi torsi pada ECVT sebesar 64,69%
Pada penelitian ini ada beberapa pembaharuan komponen, terutama di bidang kontroler. Dimana sekarang memakai Arduino Uno Board dengan mikrokontroler Atmega328, yang tentunya lebih kecil dimensinya, mudah mengoperasikannya dan tanpa perlu memakai downloader, tetapi tidak mengurangi fungsi dan efesiensinya. Untuk menampilkan kinerja dari ECVT menggunakan Grafik LCD 128x64 pixel, sehingga kinerja ECVT berupa data digital dan grafik bisa langsung diketahui tanpa harus dihubungkan dengan komputer. Motor penggerak ECVT yang digunakan adalah motor DC 24 Volt tipe MY-1016 untuk menghasilkan putaran konstan agar diperoleh pergerakkan fork srew yang stabil.