TUGAS AKHIR – TF145565
RANCANG BANGUN SISTEM PENGENDALIAN
FLOW
DAN
DATA RECONCILIATON
PADA
MIXING PIPING
FERY AGOS KURNIAWAN NRP. 2414 031 041
Dosen Pembimbing
Gunawan Nugroho, ST, MT, Ph.D NIP. 19771127 200212 1 002
PROGRAM STUDI D3 TEKNIK INSTRUMENTASI Departemen Teknik Instrumentasi
Fakultas Vokasi
i
TUGAS AKHIR – TF145565RANCANG BANGUN SISTEM PENDENDALIAN
FLOW
DAN
DATA
RECONCILIATION
PADA
MIXING PIPING
FERY AGOS KURNIAWAN NRP. 2414 031 041
Dosen Pembimbing
Gunawan Nugroho, ST, MT, Ph.D NIP. 19771127 200212 1 002
PROGRAM STUDI D3 TEKNIK INSTRUMENTASI Departemen Teknik Instrumentasi
Fakultas Vokasi
ii
FINAL PROJECT – TF 145565DESIGN OF FLOW CONTROL SYSTEM AND
DATA RECONCILIATION ON MIXIG PIPING
FERY AGOS KURNIAWAN NRP. 2414 031 041
Supervisor
Gunawan Nugroho, ST, MT, Ph.D
DIPLOMA OF INSTRUMENTATION ENGINEERING Department Of Instrumentation Engineering Faculty of Vocation
v
DATA RECONCILIATION PADA MIXING PIPING
Nama Mahasiswa : Fery Agos Kurniawan NRP : 2414 031 041
Program Studi : D3-Teknik Instrumentasi Jurusan : Teknik Instrumentasi FV-ITS Dosen Pembimbing : Gunawan Nugroho, ST, MT, Ph.D
Abstrak
Pengukuran laju aliran fluida merupakan pengukuran untuk mendapatkan data-data untuk dianalisis karena pada prinsipnya fluida merupakan energy bertekanan yang semakin banyak dikembangkan pada proses-proses di industri. Banyak juga di dalam dunia industri yang memiliki titik penggabungan dari beberapa sumber shingga sering terjadi perbedaan antara input dan outputnya dimana setiap metode pengukuran laju aliran yang digunakan akan menghasilkan suatu nilai karakteristik yang berbeda-beda, tidak semua jenis pengukuran laju aliran dapat menggunakan metode yang sama, dilihat dari pressure drop yang dihasilkan akan mempengaruhi setiap metode yang digunakan. Pada penelitian tugas akhir ini dilakukan pengendalian laju aliran dan data rekonsiliasi pada penggabungan pipa. Pada pengukuran fluida sering dijumpai sambungan pipa seperti elbow dengan kemiringan tertentu. Kemiringan pada elbow,orifice dan venturi tersebut dapat mempengaruhi perbedaan tekanan maupun pressure drop pada fluida yang melewati elbow tersebut. Pada penelitian tugas akhir ini telah dilakukan sistem pengendalian laju aliran melewati venturi. Pada pengukuran laju aliran ini digunakan sensing elemen MPX5050DP dengan Atmega32 sebagai mikrokontroller dan display monitoring dengan menggunakan LCD. rekonsiliasi dilakukan dengan flowrate sebagai variabel pengukuran untuk membuktikan bahwa laju aliran pada mixing piping memenuhi kesetimbangan massa dan energi.
vi
DESIGN OF FLOW CONTROL SYSTEM AND DATA RECONCILIATION ON MIXIG PIPING
Name : Fery Agos Kurniawan NRP : 2414 031 041
Study of Program : D3- Instrumentation Engineering Department : Instrumentation Engineering FV-ITS Supervisor : Gunawan Nugroho, ST, MT, Ph.D
Abstract
Measurement of fluid flowrate is a measure to obtain data for analysis because in principle the fluid is pressurized energy that the more developed the processes in the industry. Many also in the industrial world have a point of incorporation from multiple sources so often there is a difference between input and output where each method of measuring flow rate used will produce a different characteristic value, not all types of flow rate measurements can use the same method , Seen from the resulting pressure drop will affect every method used. In this final project, control flow rate and reconciliation data on pipe merging are carried out. Fluid measurements are often found in pipe connections. The slope of the elbow, orifice or venturi may affect the pressure difference as well as the pressure drop on the fluid passing through the elbow. In this final project has been done the system of flow rate control through venturi. At this flow rate measurement is used sensing element MPX5050DP with Atmega32 as microcontroller and display monitoring by using LCD. Reconciliation is done by flowrate as a measurement variable to prove that the flow rate at the piping mixing satisfies the mass and energy balance.
vii
Puji syukur penulis panjatkan kehadirat Allah SWT atas
limpahan rahmat dan hidayah-Nya serta shalawat dan salam
kepada Nabi Muhammad SAW sehingga penulis dapat
menyelesaikan Tugas Akhir yang berjudul
“
RANCANG
BANGUN SISTEM PENGENDALIAN
FLOW
DAN
DATA RECONCILIATION
PADA
MIXING PIPING
”
.
Penulis telah banyak mendapatkan bantuan dari berbagai
pihak dalam menyelesaikan Tugas Akhir ini. Untuk itu
penulis mengucapkan terima kasih kepada :
1. Bapak Dr.Ir.Purwadi Agus Darwito, M.Sc selaku Kepala
Departemen D3 Teknik Instrumentasi FV-ITS.
2. Bapak Gunawan Nugroho, ST, MT, Ph.D selaku dosen
pembimbing tugas akhir yang telah sabar memberikan dukungan, bimbingan, serta ilmu yang sangat bermanfaat.
3. Bapak Ir. Matradji, ST, MT selaku dosen wali yang senantiasa
memberikan motivasi, bimbingan dan arahan dalam menyelesaikan sesuatu.
4. Bapak Totok Ruki Biyanto, ST, MT, PhD selaku kepala
Laboratorium Rekayasa Instrumentasi dan Kontrol yang telah memberikan sarana dan prasarana guna menunjang pelaksanaan Tugas Akhir ini.
5. Bapak dan Ibu dosen Teknik Fisika yang telah memberikan
ilmu selama kuliah.
6. Seluruh Staf Departemen Teknik Fisika dan Departemen
Teknik Instrumentasi yang telah membantu penulis dalam hal administrasi.
7. Kedua orang tua dan seluruh keluarga besar tercinta yang
senantiasa memberikan dukungan, semangat dan do’a kepada penulis.
8. Teman-teman seperjuangan D3 Teknik Instrumentasi 2014
dalam mengerjakan Tugas Akhir, teman – teman S1 Teknik
viii
9. Eko Cahyo Wahyudi, Galih Rizki W, Moch Khafid, yang
selalu memotivasi penulis.
10. Teman–teman asisten Workshop Instrumentasi angkatan
2014, serta para senior yang selalu menjadi penyemangat dan rela membantu dalam proses pembuatan alat hingga akhir.
11. Teman-teman zelena yang bersedia meberikan tempat izin
untuk mengerjakan tugas akhir.
12. Teman-teman Workshop Instrumentasi, Laboratorium
Rekayasa Instrumentasi dan Kontrol, Laboratorium Pengukuran Fisis yang selalu memberikan sarana dan prasarana guna menunjang pembuatan alat tugas akhir.
13. Serta semua pihak yang tidak dapat disebutkan satu persatu.
Penulis menyadari bahwa penulisan laporan Tugas Akhir ini tidaklah sempurna. Oleh karena itu sangat diharapkan kritik dan saran yang membangun dari semua pihak sehingga mencapai sesuatu yang lebih baik lagi. Penulis juga berharap semoga laporan ini dapat menambah wawasan yang bermanfaat bagi pembacanya.
Surabaya, 26 Juli 2017
ix
HALAMAN JUDUL I
... i
HALAMAN JUDUL II
... ii
LEMBAR PENGESAHAN I
... iii
LEMBAR PENGESAHAN II
... iv
ABSTRAK
... v
ABSTRACT
... vi
KATA PENGANTAR
... vii
DAFTAR ISI
... ix
DAFTAR GAMBAR
... xi
DAFTAR TABEL
... xiii
BAB I PENDAHULUAN
1.1
Latar Belakang ... 1
1.2
Rumusan Masalah ... 2
2.2
Jenis-jenis Aliran Fluida ... 5
2.3
Laju Aliran Pada Elbow Tab ... 7
2.4
Sensor MPX10DP ... 8
2.5
Rotameter ... 8
2.6
Venturi ... 9
2.7
Orifice ...10
2.8
Mikrokontroler ATmega 32 ...11
2.9
Data Reconciliation ...
13
x
3.1
Flowchart
Perancangan Alat ...17
3.2
Studi Literatur ...18
3.3
Perancangan Sistem dan Pembuatan Alat ...18
3.4
Integrasi ...24
3.5
Pengujian Alat dan Analisa ...24
3.6
Pembuatan Laporan ...25
BAB IV ANALISA DATA
4.1
Pengujian Sensor ...27
4.2
Pembahasan ...40
BAB V PENUTUP
5.1
Kesimpulan ...43
5.2
Saran ...44
DAFTAR PUSTAKA
LAMPIRAN A
DATASHEET
MPX5050DP
LAMPIRAN B
DATASHEET
ATMEGA32
LAMPIRAN C
LISTING PROGRAM
PADA CVAVR
LAMPIRAN D
LISTING PROGRAM
REKONSILIASI
PADA MATLAB
LAMPIRAN E
DATA RECONCILIATION
LAJU
ALIRAN
PADA
MIXING PIPING
LAMPIRAN F DATA KALIBRASI SENSOR PADA
xi
Gambar 2.1
Pengukuran Laju Aliran Dengan
Elbow Tabs
7
Gambar 2.2
Schematic Pressure Sensor
... 8
Gambar 2.3
Rotameter ... 9
Gambar 2.4
Venturimeter ... 10
Gambar 2.5
Plat Orifice ... 11
Gambar 2.6
ATMEGA 128 ... 12
Gambar 2.7
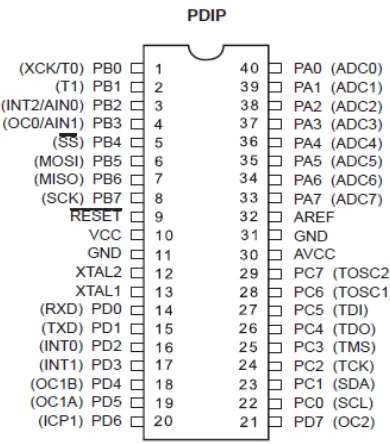
Konfigurasi Pin Atmega128 ... 13
Gambar 2.8
Motor Servo ... 15
Gambar 3.1
Skema diagram alir Tugas Akhir ... 17
Gambar 3.2
Blok diagram sistem ... 19
Gambar 3.3
Skematik
Sensor
Pressure
MPX5050DP ... 20
Gambar 3.4
Karakteristik
plant
... 20
Gambar 3.5
Desain Rancang Bangun Tampak Depan ... 21
Gambar 3.6
Desain Rancang Bangun Tampak Belakang22
Gambar 3.7
Orifice ... 23
Gambar 3.8
Instalasi Venturi ... 23
Gambar 3.9
Desain Tampak Depan Rancang Bangun .. 24
Gambar 4.1 Grafik Perhitungan Nilai Cv Pada Elbow ... 28Gambar 4.2
Grafik perbandingan pembacaanflowratestandart dan flowrate sensor ... 29
Gambar 4.3
Grafik Histeresi
s Flowrate ...
31
Gambar 4.4
Pengujian
Valve ...
33
Gambar 4.5 Diagram blok sistem pengendalian laju aliran .... 34Gambar 4.6 Grafik Close Loop Sistem
Pengendalian Laju Aliran ... 34
Gambar 4.7 Grafik Respon Tracking Set Point
Sistem Pengendalian laju aliran ... 35
Gambar 4.8 Grafik flow in1 sebelum dan sesudah
rekonsiliasi untuk 3 GPM ... 35
Gambar 4.9 Grafik flow in2 sebelum dan sesudah
rekonsiliasi untuk 3 GPM ... 36
Gambar 4.10 Grafik flow out sebelum dan sesudah
rekonsiliasi untuk 3 GPM ... 36
xii
Sesudah rekonsiliasi untuk 7 GPM...37
Gambar 4.12 Grafik flow in2 sebelum dan sesudah
rekonsiliasi untuk 7 GPM... ... 37
Gambar 4.13 Grafik flow out sebelum dan sesudahrekonsiliasi untuk 7 GPM ... 38
Gambar 4.14 Grafik flow in1sebelum dan sesudahrekonsiliasi untuk 10 GPM ... 38
Gambar 4.15 Grafik flow in2 sebelum dan sesudahrekonsiliasi untuk 10 GPM ... 39
Gambar 4.16 Grafik flow out sebelum dan sesudahxiii
Tabel 3.1
Tabel Spesifikasi Rancang Bangun ... 22
Tabel 4.1
Data Perhitungan
Cv
pada
Elbow Tabs
... 27
Tabel 4.2
Pembacaan standart dan alat ... 28
Tabel 4.3 Pengujian Karakteristik Alat Ukur Laju Aliran ... 301
PENDAHULUAN
1.1 Latar Belakang
Penggunaan pipa banyak digunakan oleh umum, baik di kalangan masyarakat maupun industri seperti perusahaan-perusahan pendistribusian air minum, minyak maupun gas bumi, dikarenakan pipa merupakan sarana pendistribusian fluida yang murah, memiliki berbagai ukuran dan bentuk penampang. Baik berpenampang lingkaran maupun kotak. Material pipa bermacam-macam, yaitu baja, plastik, PVC, acrylic, dan lain sebagainya. Pada dunia industri tentunya efisiensi dan kualitas produk yang dihasilkan akan mempunyai nilai lebih, karena dengan efisiensi produk yang tinggi maka biaya yang diperlukan dapat ditekan dan harga jual produk lebih kompetitif. Dan salah satu teknologi yang berguna untuk meningkatkan efisiensi yang tinggi adalah dalam penggunaan pipa dalam pendistribusian pada pipa yang melewati percabangan dan penggabungan fluida cair untuk proses produksi dan kebutuhan air minum, dan lain sebagainya [1].
Dan dalam pendistribusian fluida cair tersebut sering sekali
dipakai sambungan pipa (fittings), venturi, orifice, maupun
flange. Tetapi dalam pendistribusian fluida yang digunakan untuk membelokan arah aliran fluida dipakailah pipa lengkung atupun
elbow. Pada dasarnya aliran fluida dalam pipa akan mengalami
penurunan tekanan atau pressure drop seiring dengan panjang
pipa ataupun disebabkan oleh gesekan dengan permukaan saluran, dan juga ketika aliran melewati sambungan pipa, belokan, katup, difusor, dan sebagainya [1].
Pada saat sebelum terjadi penggabungan atau pencampuran aliran fluida dari dua pipa yang berbeda dimana pada kedua pipa tersebut dipasang orifice dan venturi yang memiliki tingkat pembacaan atau akurasi yang berbeda yang selanjutnya
digunakan untuk mengetahui nilai perbedaan tekanan (differential
pressure) yang dihasilkan yang kemudian dikonversi menjadi
penjumlahan antara nilai flow pada orifice dan nilai flow pada
venturi yang memungkinkan masih terdapat error karena
pembacaan alat ukur, sehingga nilai yang dihasilkan dari
penjumlahan tersebut tidak sama dengan nilai setelah dilakukan
penggabungan aliran fluida (mixing piping). Oleh karena itu
perancangan sistem pengendalian flow dan data reconciliation
pada mixing piping perlu dilakukan agar proses dapat memenuhi
hukum kesetimbangan massa dan energi.
1.2 Permasalahan
Berdasarkan latar belakang yang dijelaskan diatas, maka rumusan masalah dalam tugas akhir ini adalah:
a. Bagaimana merancang sistem pengukuran laju aliran dan
rekonsiliasi data pada penggabungan aliran fluida?
b. Bagaimana hasil nilai perbedaan tekanan dengan
menggunakan setiap metode pengukuran?
1.3 Tujuan
Adapun tujuan utama dari tugas akhir ini adalah sebagai berikut :
a. Membuat rancang bangun sistem pengukuran laju aliran
rekonsiliasi data pada penggabungan aliran fluida.
b. Mengetahui hasil nilai perbedaan tekanan dengan
menggunakan setiap metode pengukuran.
1.4 Batasan Masalah
Untuk memfokuskan penyelesaian masalah pada penelitian tugas akhir ini maka batasan masalah yang diangkat adalah sebagai berikut :
a. Alat yang dirancang dan dibangun hanya memiliki fungsi untuk mengukur laju aliran yang didapat dari perbedaan tekanan dengan menggunakan metode
b. Komponen dari alat ini adalah MPX5050DP sebagai sensor tekanan, ATmega32 sebagai mikrokontroller atau
data program, dan SDCard sebagai data logger.
1.5 Manfaat
5
BAB IITINJAUAN PUSTAKA
2.1 Fluida
Fluida atau zat cair adalah wujud yang tidak mempunyai bentuk yang tetap, tetapi dapat mengalir dan dapat mengambil bentuk volumenya. Fase cair tidak dapat mempertahankan bentuk yang tetap karena ia mengikuti bentuk wadahnya, tetapi pada fase ini tidak dengan mudah dimampatkan. Sehingga volumenya dapat diubah jika dikerjakan pada gaya yang sangat besar. Molekul-molekul didalam fluida mempunyai kebebasan lebih besar untuk bergerak sendiri-sendiri. Dalam zat cair gaya interaksi antara molekul-molekul, yaitu yang disebut kohesi, masih cukup besar, karena jarak antara molekul tidaklah terlalu besar. Akibatnya zat cair masih tampak sebagai kesatuan, sehingga kita masih dapat
melihat batas-batas zat cair. Fase gas tidak mempunyai bentuk
maupun volume yang tetap, ia akan berkembang mengisi seluruh wadah. Molekul-molekul gas dapat dianggap sebagai suatu sistem partikel bebas. Gaya kohesi antar molekul-molekul sangatlah kecil, dan interaksi antar molekul terutama adalah oleh tumbukan. Sebagai akibatnya, gas cenderung untuk memenuhi ruang. Disamping itu, gas lebih mudah dimampatkan daripada zat cair. Karena fase cair dan gas tidak mempertahankan suatu bentuk yang tetap, keduanya mempunyai kemampuan mengalir. Dengan demikian kedua-duanya sering secara kolektif disebut sebagai fluida [2].
2.2 Jenis-jenis Aliran Fluida
Aliran fluida terbagi berdasarkan beberapa kategori, diantaranya berdasarkan sifat pergerakannya adalah :
Merupakan aliran fluida yang terjadi dimana besar dan arah dari vektor-vektor kecepatan konstan dari suatu titik ke titik selanjutnya pada aliran fluida tersebut.
Non Uniform Flow
Aliran yang terjadi dimana besar dan arah vektor-vektor kecepatan fluida selalu berubah terhadap lintasan aliran fluida tersebut, hal ini terjadi apabila luas penampang medium fluida juga berubah.
Steady Flow
Merupakan aliran yang terjadi apabila kecepatannya tidak dipengaruhi oleh waktu, sehingga kecepatannya konstan pada setiap titik pada aliran tersebut.
Non Steady Flow
Merupakan aliran yang terjadi apabila ada suatu perubahan kecepatan aliran tersebut terhadap perubahan waktu.
Berdasarkan pengaruh tekanan terhadap volume, fluida dapat digolongkan menjadi 2 yaitu:
1.Fluida tak termampatkan (incompressible)
Pada kondisi ini fluida tidak mengalami perubahan dengan adanya perubahan tekanan, sehingga fluida tak termampatkan.
2.Fluida termampatkan (compressible)
Pada keadaan ini, fluida mengalami perubahan volume
dengan adanya perubahan tekanan, sehingga fluida ini secara umum disebut fluida termampatkan.
Fluida dapat juga dibedakan berdasarkan kekentalannya, yaitu fluida nyata (viscousfluid) dan fluida ideal (non viscous fluid). Fluida nyata adalah fluida yang memiliki kekentalan, fluida ini dapat kita jumpai dalam kehidupan sehari-hari contohnya air dan udara. Sedangkan fluida ideal, tidak ada dalam kehidupan seharihari dan hanya dipakai dalam teori dan kondisi-kondisi khusus
saja.Kemudian jenis aliran fluida berdasarkan gaya yang terjadi pada fluida dibedakan atas [1]:
Aliran dengan fluida yang bergerak dalam lapisan –
lapisan, atau lamina –lamina dengan satu lapisan
meluncur secara lancar . Dalam aliran laminar ini viskositas berfungsi untuk meredam kecendrungan terjadinya gerakan relative antara lapisan.
Aliran Turbulen
Aliran dimana pergerakan dari partikel – partikel fluida sangat tidak menentu karena mengalami percampuran serta putaran partikel antar lapisan, yang mengakibatkan saling tukar momentum dari satu bagian fluida kebagian fluida yang lain dalam skala yang besar. Dalam keadaan
aliran turbulen maka turbulensi yang terjadi
membangkitkan tegangan geser yang merata diseluruh
fluida sehingga menghasilkan kerugian – kerugian aliran.
Aliran Transisi
Aliran transisi merupakan aliran peralihan antara aliran laminar dan aliran turbulen.
2.3 Laju Aliran Pada Elbow Tabs
Elbow Tabs bekerja berdasarkan beda tekanan yang melalui suatu belokan pada pipa berdasarkan sudut yang ada pada suatu pipa yang dapat dicari hubungannya dengan kecepatan aliran fluida. Sehingga dari mengetahui beda tekanan dan kecepatan alir,
maka akan didapatkan jumlah aliran yang melewati Elbow Tabs
tersebut. Elbow Tabs merupakan alat mengukur kelajuan (debit)
cairan pada pipa. Elbow Tabs dapat dilihat pada gambar dibawah
ini :
Gambar 2.5. merupakan gambar dari metode pengukuran
laju aliran dengan metode Elbow Tabs. Sebuah Elbow pada suatu
pipa dapat digunakan sebagai alat pengukuran laju aliran seperti
pada venturimeter maupun orifice plate. Pengukuran dengan
menggunakan Elbow Tabs tidak memiliki nilai keakuratan yang
baik dari venturimeter maupun orifice plate. Typical akurasinya kurang lebih 4% dari nilai Q.[6]
2.4 Sensor MPX5050DP
Sensor tekanan MPX5050DP merupakan series silicon piezoresistive memberikan output tegangan yang linier dan akurat terhadap tekanan yang diberikan. Output tegangan dari
differential atau gaugesensor meningkat dengan terjadinya
peningkatan tekanan pressure side (P1) relative terhadap vacuum
side (P2). Begitu sebaliknya tegangan output meningkat pada
vacuum side dan relative terhadap pressure side [4].
Gambar 2.2 Schematic Pressure Sensor
2.5 Rotameter
Rotameter merupakanalat pengukur aliran yang mengukur aliran
volumetrik fluida cair. Seperti yang ditunjukkan gambar 4
variabel area dari flowmeter terdiri dari float di dalam pipa ulir.
Pipa yang biasanya terbuat dari high-strengh glass disusun
yang lebar. Pelampung atau float tidak benar-benar mengapung namun hanya terlihat seperti mengapung, begitu naik dan turun
ke level dimana keadaan equilibrium di bawah perlakuan beratnya
dan gaya tarik fluida dan gaya apung akan bergerak ke atas. Fluida naik melewati pelampung melalui ruang seperti cincin di antara pelampung dan dinding dari pipa, dan dari celah ini terbentuklah pressure drop diantara bagian atas dan bawah dari
pelampung. Jika laju aliran meningkat, maka pressure drop juga
naik dan menyebabkan pelampung naik hingga ruang sepereti
cincin antara pelampung dan dinding pipa menurunkan pressure
drop ke nilai equilibriumnya lagi [5].
Gambar 2.3 Rotameter [5]
2.6 Venturi
Gambar 2.4 Venturimeter[6]
Kemiringan dibagian input kira-kira sebesar 30º sedangkan dari bagian output lebih kecil, yaitu antara 3º sampai 15º. Perbandingan diameter antara leher dan pipa terletak antara 0,25 mm sampai 0,50 mm. Hasil pengukuran aliran dengan menggunakan Tabung Venturi ini merupakan pengukuran yang paling teliti bila dibandingkan dengan Head Flowmeter yang lain, tetapi juga paling mahal harganya. Karena bagian leher merupakan bagian yang lebih mudah rusak maka kadang-kadang bagian leher ini dibuat sebagai unit tersendiri agar mudah diganti [6].
2.7 Orifice
Gambar 2.5 Plat Orifice[6]
Macam-macam tipe Plat Orifice :
Plat Orifice tipe eksentris dan segmental digunakan untuk mengukur aliran yang mengandung bahan-bahan padat. Bila digunakan Plat Orifice tipe konsentris, maka akan timbul endapan-endapan benda padat yang akan mengganggu pengukuran. Demikian juga lubang kecil yang terletak pada bagian bawah, dibuat sedemikian rupa agar kesalahan pengukuran dapat diperkecil, yaitu untuk mengalirkan fluida akibat kondensasi agar tidak berkumpul pada Plat Orifice yang dapat mengganggu pengukuran aliran fluida. Untuk aliran fluida udara yang terjebak dialirkan dengan memberi lubang kecil di bagian atas [6].
2.8 Mikrokontroler ATmega 32
Mikrokontroler Atmega32 merupakan salah satu varian dari mikrokontroler AVR 8-bit. Beberapa fitur yang dimiliki adalah memiliki beberapa memory yang bersifat non-volatile, yaitu 128Kbytes of In-System Self-Programmable Flash program memory (128Kbytes memory flash untuk pemrograman), 4Kbytes memori EEPROM, 4Kbytes memori Internal SRAM, write/erase cycles : 10.000 Flash/100.000 EEPROM (program dalam mikrokontroler dapat diisi dan dihapus berulang kali sampai 10.000 kali untuk flash memori atau 100.000 kali untuk penyimpanan
Gambar 2.6 ATMEGA 32
Selain memory, fitur yang dimiliki oleh mikrokontroler atmega32 ini adalah pada perangkat peripheral interfacenya, yaitu memiliki 2 buah 8-bit Timer/Counter, 2 buah expand 16-bit Timer/Counter, RTC (Real Time Counter) dengan oscillator yang terpisah, 2 buah 8-bit chanel PWM, 4 PWM chanel dengan resolusi pemrograman dari 2 sampai 16 bits, output compare modulator, 8-chanel 10-bit ADC, 2 buah TWI (Two Wire Interface), 2 buah serial USARTs, Master/Slave SPI serial interface, Programmable Watchdog Timer dengan On-chip Oscillator, On-chip analog comparator, dan memiliki 53 programmable I/O.
Desain sistem minimum tersebut merupakan rangkaian minimum yang terdiri dari beberapa led indikator dan 2 port I/O expansion, selain itu juga dilengkapi dengan rangkaian referensi clock, rangkaian reset, dan port pemrograman ISP. Pada rangkaian sistem minimum ini juga harus diperhatikan bahwa pin PEN
harus pada kondisi pull up (pin PEN dihubungkan dengan
untuk diintegrasikan menjadi suatu sistem atau rangkaian elektronika yang lebih kompleks.
Gambar 2.7 Konfigurasi Pin Atmega32
2.9 Data Reconciliation
masalah kualitas data, tidak pada kualitas proses. Langkah – langkah dalam melakukan teknik rekonsiliasi data adalah sebagai berikut :
1. Pembuatan model konstrain proses
Teknik rekonsiliasi data membutuhkan model konstrain, yang mana model konstrain ini secara umum menggunakan hukum kesetimbangan material. Untuk kasus dimana proses dalam keadaan tunak, keberadaan akumulasi dapat diabaikan. Sedangkan untuk proses yang dinamik keberadaan dari akumulasi ini tidak dapat diabaikan karena model konstrainnya harus dinyatakan dalam persamaan differensial. Bentuk konstrain yang dipakai dalam rekonsiliasi, sangat tergantung pada ruang lingkup permasalahan rekonsiliasi serta bentuk dari unit proses. Semakin komplek model konstrain yang dibangun maka akan semakin sulit pula teknik penyelesaian dalam rekonsiliasi data.
2. Klasifikasi variable
Strategi rekonsiliasi data yang diimplementasikan pada sebuah sistem yang mana didalamnya hanya mengukur sebagian saja variabel flow, akan lebih efisien jika dibandingkan dengan melakukan pengukuran secara
keseluruhan. Dalam menyelesaikan masalah
rekonsiliasi ini, terlebih dahulu dilakukan teknik dekomposisi matrik untuk mengklasifikasi variabel flow baik yang diukur maupun yang tidak diukur. Dari variabel yang diukur dapat ditentukan variabel mana yang bersifat redundant dan nonredundant. Sedangkan pada variabel yang tidak diukur dapat diperoleh variabel yang teramati dan tidak teramati.
3. Perhitungan solusi rekonsiliasi
2.10 Motor Servo
Motor servo adalah sebuah motor dengan sistem umpan balik tertutup di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. motro servo sendiri terdiri dari rangkaian pengontrol, gear, potensiometer dan DC motor. Potensiometer terhubung dengan gear demikian pula DC motor. Ketika DC motor diberi signal oleh rangkaian pengontrol maka dia akan bergerak demikian pula potensiometer dan otomatis akan mengubah resistansinya. Rangkaian pengontrol akan mengamati perubahan resistansi dan ketika resistansi mencapai nilai yang diinginkan maka motor akan berhenti pada posisi yang diinginkan [9].
17
BAB IIIPERANCANGAN DAN PEMBUATAN ALAT
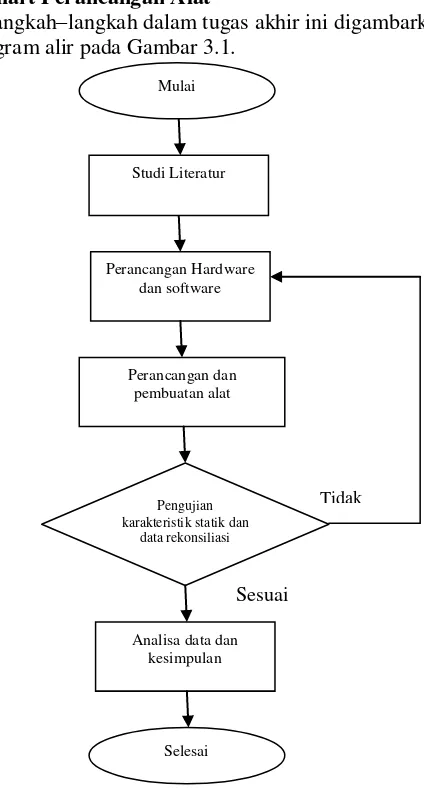
3.1 Flowchart Perancangan Alat
Langkah–langkah dalam tugas akhir ini digambarkan
dalam diagram alir pada Gambar 3.1.
Gambar 3.1. Skema Diagram Alir Tugas Akhir
Mulai
Perancangan Hardware dan software
Perancangan dan pembuatan alat
Pengujian karakteristik statik dan
data rekonsiliasi
Analisa data dan kesimpulan
Selesai Studi Literatur
Sesuai
Dengan adanya skema diagram alir tugas akhir mengenai "
Rancang Bangun Sistem Pengendalian Flow Dan Data
Reconciliation Pada Mixing Piping" yang telah digambarkan, maka adapun penjelasan pada setiap langkah-langkah yang telah digambarkan adalah sebagai berikut :
3.2 Studi Literatur
Tahap awal pada skema diagram alir tugas akhir ini dimulai dengan adanya studi literatur sebagai upaya pemahaman terhadap materi yang menunjang tugas akhir mengenai "Rancang Bangun
Sistem Pengendalian Flow Dan Data Reconciliation Pada Mixing
Piping". Studi literatur ini dilakukan dengan mencari dan
mempelajari informasi dari e-book maupun manual book
mengenai uji performansi suatu sensor yang diaplikasikan pada rancang bangun laju aliran dengan menggunakan ATmega32.
3.3 Perancangan Sistem dan Pembuatan Alat
Setelah melakukan studi literatur, selanjutnya adalah melakukan perancangan sistem dan pembuatan rancang bangun
laju aliran yang terdiri dari perancangan pembuatan hardware,
pembuatan software monitoring, serta pembuatan mekanik.
Hardware dan software yang telah dibuat kemudian diintegrasikan melalui mikrokontroller Atmega32. Selanjutnya diintegrasikan dengan mekanik rancang bangun laju aliran agar dapat memonitoring laju aliran dari perbedaan tekanan yang didapat.
3.3.1 Perancangan dan Pembuatan Hardware
Pada perancangan dan pembuatan hardware untuk
mengintegrasikannya dengan sensor MPX5050DP, aktuator
berupa motor servo dan open logger sebagai media penyimpan
Berikut merupakan diagram blok dari perancangan sistem
Gambar 3.2 Blok diagram sistem
Keterangan:
1. 1-3 GPM
2. 0-5 Volt
3. 0/100 %
4. 1-3 GPM
5. 0-7,25 Psi (0-4,7 Volt)
Dari diagram blok diatas dapat diketahui bahwa kontroller yang digunakan berupa mikrokontroller ATMega32, kemudian aktuatornya berupa servo of valve, plant atau tempat terjadinya
pemrosesan berupa mixing piping dan sensor yang digunakan
untuk menyensing atau mendeteksi tekanan berupa sensor tekanan MPX5050DP.
3.3.2 Perancangan Sensor Pressure MPX5050DP
Sensor MPX5050DP merupakan sensor yang digunakan untuk mengetahui tekanan udara dalam sebuah benda,
berdasarkan datasheet, sensor ini dapat mendeteksi tekanan pada
tabung gas dengan besar tekanan 0-50 kPa atau 0-7,25 Psi. Sensor ini memiliki tegangan output berkisar antara 4,6V-4,8VDC dan mempunyai tingkat akurasi +/- 2,5Vfss dengan kompensasi suhu sebesar 0 C sampai 85 C. Sensor akan mengirimkan data kepada
mikrokontroler ATMega32 yang akan ditampilkan dalam Liquid
Crystal Display (LCD).
1
ATMega
32
2
SOV
3
Mixing
Piping
4
Sensor
MPX5050D
Gambar 3.3 Skematik SensorPressure MPX5050DP
3.3.3 Pembuatan Software Pengendalian
Adapun rancangan program yang sudah dibuat pada
software CodevisionAVR terlampir pada lampiran C.
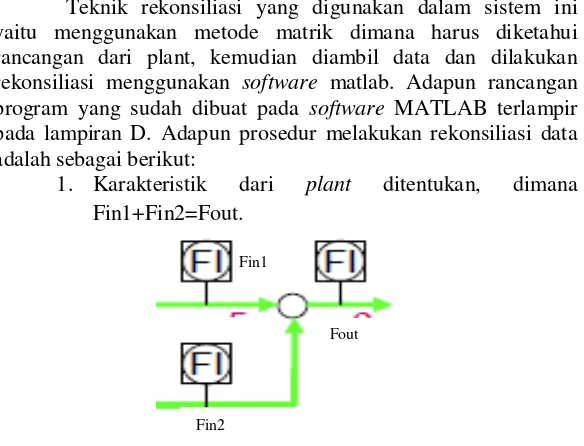
3.3.4 Prosedur Rekonsiliasi
Teknik rekonsiliasi yang digunakan dalam sistem ini yaitu menggunakan metode matrik dimana harus diketahui rancangan dari plant, kemudian diambil data dan dilakukan
rekonsiliasi menggunakan software matlab. Adapun rancangan
program yang sudah dibuat pada software MATLAB terlampir
pada lampiran D. Adapun prosedur melakukan rekonsiliasi data adalah sebagai berikut:
1. Karakteristik dari plant ditentukan, dimana
Fin1+Fin2=Fout.
Gambar 3.4 Karakteristik Plant Fin2
Fin1
2. Variabel pengukuran dalam bentuk matrik ditentukan.
y=[f_in1(i,1);f_in2(i,1);f_out(i,1)];
3. Variabel pengukuran diubah dalam bentuk matrik.
y=[f_in1(i,1);f_in2(i,1);f_out(i,1)];
menjadi
A=[1 1 -1];
4. Nilai variansi didapatkan dari nilai standart deviasi
kuadrat dan diubah dalam bentuk matrik.
V=[std_in1^2 0 0;0 std_in2^2 0;0 0 std_out^2];
5. Perhitungan rekonsiliasi data dilakukan berdasarkan
rumus.
yhat=y-V*A'*inv(A*V*A')*A*y;
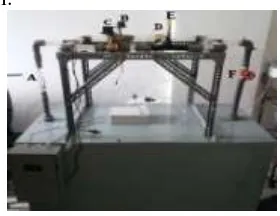
3.3.5 Pembuatan Mekanik
Pembuatan mekanik meliputi pembuatan sistem pada
rancang bangun laju aliran dimana terdapat beberapa alat ukur
yaitu venturimeter, elbow tabs, orifice, serta rotameter yang saling terintegrasi.
Gambar 3.6 Desain rancang bangun Tampak Belakang
Dari desain rancang bangun diatas dapat diketahui spesifikasi dari masing-masing alat, berikut adalah tabel spesifikasinya :
Tabel 3.1 Tabel Spesifikasi Rancang Bangun
Kode Keterangan Spesifikasi
A Rotameter Dengan debit
5GPM/18LPM
B Motor Servo + Valve 1 Dengan sudut putar
360o , dan valve
dengan diameter 1”
C Motor Servo + Valve 2 Dengan sudut putar
180o , dan valve
dengan diameter 1”
D Orifice Diameter luas penampang besar 31 diameter kecil 13mm E Venturimeter Diameter luas
penampang besar 20 mm dan penampang kecil 10 mm
F Gate Valve Dengan diameter 1”
G Pompa air Dengan kapasitas 34
Liter/menit
H Tangki Air Kapastas 40 Liter
Orifice yang terpasang berjenis concentric orifice dengan lubang tepat ditengah dengan diameter kecil 13 mm dan tanpa sudut.
Gambar 3.7 Orifice
Venturi memiliki 3 bagian utama yaitu inlet, outlet, dan
throat. Pemasangan venturi dihubungkan dengan pipa yang dialiri fluida. Untuk diameter inlet dan outlet berukuran sama dengan diameter pipa utama yaitu 20 mm, sedangkan untuk bagian throat memiliki diameter 10 mm.
Gambar 3.8 Instalasi Venturi
Elbow Tabs yang terpasang merupakan jenis Elbow biasa
dengan diameter 1 inch. Berikut adalah gambar detail dari Elbow
yang terpasang pada rancang bangun laju aliran :
3.4 Integrasi
Pengintegrasian ini dilakukan agar antara hardware,
software dan rancang bangun mekanikLaju Aliran dapat menjadi satu kesatuan ketika alat difungsikan. Langkah awal yaitu dengan mengintegrasikan hardware, sensor MPX5050DP dan juga Atmega dengan rancang bangun laju aliran untuk mengukur aliran pada setiap alat ukur untuk diketahui perbedaan tekanannya.
Akuisisi data atau Logging data (data logging) Sistem
akuisisi data dapat didefinisikan sebagai suatu sistem yang berfungsi untuk menganalisa, mengambil, mengumpulkan dan menyiapkan data yang telah didapat, hingga memprosesnya untuk menghasilkan data yang dikehendaki.
Data logger (perekam data) adalah sebuah alat elektronik yang mencatat data dari waktu ke waktu baik
yang terintegrasi dengan sensor dan instrument didalamnya maupun ekternal sensor dan instrument. Atau secara singkat data logger adalah alat untuk melakukan data logging sebagai media penyimpanan data.
3.5 Pengujian Alat dan Analisa
Sistem monitoring laju aliran terlebih dulu dirangkai.
Selanjutnya dilakukan percobaan sederhana. Pada sistem pengukuran aliran diuji coba dengan cara menyalakan pompa
kemudian air akan mengalir secara squensial. air mengalir
melalui orifice, venturi, dan belokan pada elbow tabs tersebut, pada rancang bangun ini air yang mengalir akan memiliki
perbedaan tekanan karana terdapat pengaruh pressure drop pada
pipa dan gesekan pada pipa yang melewati orifice, venturi, dan
elbow tabs tersebut, sehingga dapat diketahui pula kecepatan
aliran dan flowrate yang mengalir pada masing-masing metode
pengukuruan tersebut. Untuk rangkaian mekanik dilakukan uji
beberapa alat ukur aliran yaitu venturimeter, rotameter, elbow tabs, dan orifice. Percobaan ini bertujuan untuk mengetahui ada atau tidaknya kebocoran pada pipa dan berfungsi tidaknya rotameter sebagai kalibrator untuk alat ukur yang diuji. Apabila semua rancang bangun dan sistem monitoring laju aliran dapat bekerja dengan baik, maka selanjutnya dilakukan pengambilan data pada dan dilakukan data reconciliatiion yang bertujuan untuk menyeimbangkan data.
3.6 Pembuatan Laporan
27
BAB IVANALISA DATA DAN PEMBAHASAN
4.1 Analisa Data 4.1.1Pengujian Alat
Dilakukan pengujian alat dengan mencari data pengujian dari
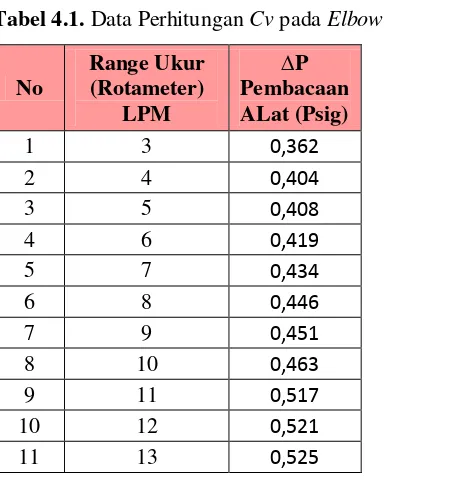
input dan output alat sebagai nilai pengonversi dari nilai keluaran sensor menjadi nilai yang sesuai dengan besaran fisis yang diukur. Pengujian pembacaan tekanan dilakukan pada rentang 3 - 13 LPM. Dengan data pengujian alat yang tercantum pada Tabel 4.1 sebagai berikut.
Tabel 4.1. Data Perhitungan Cv pada Elbow
pengukuran tekanan menghasilkan nilai Cv yang ditunjukkan
Gambar 4.1 Grafik Perhitungan Nilai Cv Pada Elbow
Berdasarkan Gambar 4.4 diatas, nilai Cv didapat dari hasil pengukuran pada pada Tabel 4.1, dimana hasil tersebut diolah dalam excel kemudian garis yang muncul diatur menjadi intercept sehingga nilai y= ax. Sehingga dari grafik yang dihasilkan pada
Gambar 4.1 menunjukkan bahwa nilai Cv dari alat ukur elbow
adalah a= Cv= y =19,63x. Dari nilai Cv yang didapat maka dapat
dicari nilai flowrate dengan persamaan rumus Q=Cv√Delta P .
Berikut merupakan tabel pembacaan standart dan pembacaan alat:
Tabel 4.2 Pembacaan standart dan alat
Tabel Lanjutan
3 5 4,5 0,97 0,723 0,7181 0,72055
4 6 5,71 1,508 1,4125 1,40341 1,40796
5 7 6,54 1,727 1,7241 1,72264 1,72337
6 8 7,34 1,939 1,98156 1,97143 1,9765
7 9 8,57 2,263 2,11035 2,11324 2,1118
8 10 9,47 2,507 2,32774 2,21623 2,27199
9 11 10,58 2,794 2,4392 2,421 2,4301
10 12 11,356 2,99 2,692 2,662 2,677
11 13 12,41 3,278 3,1623 3,108 3,13515
Dari tabel data 4.2 didapatkan grafik untuk pembacaan standart sebagai berikut:
Gambar 4.2 Grafik perbandingan pembacaan flowratestandart
dan flowrate sensor
Dari grafik yang didapat pada gambar4.2 diketahui
perbandingan antara nilai pembacaan flowrate standart dan nilai
4.1.2 Data Spesifikasi Alat
Berdasarkan data yang telah didapatkan dari pengujian spesifikasi alat melalui data karakteristik statik menghasilkan data pada Tabel 4.1berikut :
Tabel 4.3 Pengujian Karakteristik Alat Ukur Laju Aliran
N
Tabel 4.4 Lanjutan Tabel 4.2
(P.std--0,0501372 -0,07538 0,83089 -0,0276503
0,134858 0,02466 1,013086 -0,2026657
-2,8327128 -0,0049 0,386892 0,3361084
0,0663428 -0,00909 1,470216 -0,0577156
-0,0193373 -0,01013 1,823937 0,1576227
0,0668162 0,00289 2,089844 0,0205059
0,0937435 -0,11151 2,290095 0,0376451
0,1302434 -0,0182 2,525636 -0,0864358
0,1046823 -0,03 2,686493 0,005507
0,0435784 -0,0543 2,922855 0,2394454
Berikut ini hasil perhitungan nilai karakterisitik statik
flowrate berdasarkan data pada tabel 4.3. :
sensitivitas 0,92
maksimum histerisis didapat sebesar
%
Berikut Gambar 4.4 merupakan grafik Histerisis dari hasil pengukuran laju aliran naik dan turun dengan menggunakan metode elbow tabs.
Non-linieritas
dimana diketahui nilai a = 0,08142 LPM dan nilai k = 0,9244 dan nilai non-linieritas maksimum sebesar 0,3361 sehingga didapat nilai non linieritas maksimum per unit sebesar :
%
Sehingga menghasilkan nilai :
4.1.3 Pengujian Sistem Pengendalian Flow MPX5500DP
A. Pengujian Valve
Adapun pengujian valve yang telah dilakukan adalah
sebagai berikut:
Tabel 4.5 Hasil pengujian valve
No
Set Point Flowrate(GPM)
Bukaan
Valve Derajat
Flowrate (GPM) Error
1 1 30% 27 1,2 -0,2
2 2 55% 50 2,06 -0,06
3 3 100% 90 2,95 0,05
Dari tabel 4.4 hasil pengujian valve yang telah dilakukan
dengan beberapa variasi bukaan valve didapatkan grafik sebagai
berikut:
Gambar 4.4 Pengujian Valve
B. Close Loop
Gambar 4.5 Diagram blok sistem pengendalian laju aliran
Gambar 4.5 diatas merupakan gambar diagram blok sistem
pengendalian tekanan pada plant yang terdiri dari mikrokontroler
ATMega 32 sebagai controller, motor servo sebagai actuator,
plant mixing piping sebagai tempat pemrosesan, dan sensor MPX5050DP sebagai sensor untuk sensing perbedaan tekanan yang kemudian dikonversi menjadi flowrate. Nilai laju aliran
yang dibaca oleh sensor akan ditampilkan ke display LCD (Liquid
Crystal Display) 4x20
.
Gambar 4.6 Grafik Close Loop Sistem Pengendalian Laju Aliran
ATMega
32
SOV
Mixing
Piping
Sensor
MPX5050D
Gambar 4.6 merupakan grafik close loop sistem
pengendalian tekanan, dimana tekanan mencapai set point 2 pada
waktu 7 detik.
C. Tracking Set Point
Gambar 4.7 Grafik Respon Tracking Set Point Sistem Pengendalian laju aliran
4.1.4 Pengambilan Data Rekonsiliasi
Pada tugas akhir ini telah dilakukan pengambilan data selama 1 menit sehingga didapatkan data sebanyak 30. Data yang telah diambil dimasukan kedalam tabel yang telah terlampir. Data yang diambil terdiri dari 3 bagian yaitu aliran yang masuk dari
orifice menuju elbow(flow in1), aliran masuk dari venturi menuju
elbow (flow in 2), dan aliran air pada mixing piping (flow out ).
Pada gambar 4.8 dapat dilihat grafik perbandingan antara laju aliran air setelah melewati orifice (Fin1) dengan laju aliran
air setelah diolah dengan menggunakan data rekonsilasi (Fin1’).
Gambar 4.9 Grafik flow in2 sebelum dan sesudah rekonsiliasi untuk 3 LPM
Pada gambar 4.9 dapat dilihat grafik perbandingan antara laju aliran air setelah melewati venturi (Fin2) dengan laju aliran
air setelah diolah dengan menggunakan data rekonsilasi (Fin2’).
Pada gambar 4.10 dapat dilihat grafik perbandingan antara laju aliran air pada mixing piping (Fout) dengan laju aliran air
setelah diolah dengan menggunakan data rekonsilasi (Fout’).
Gambar 4.11 Grafik flow in1 sebelum dan sesudah rekonsiliasi untuk 7 LPM
Pada gambar 4.11 dapat dilihat grafik perbandingan antara laju aliran air setelah melewati orifice (Fin1) dengan laju aliran
air setelah diolah dengan menggunakan data rekonsilasi (Fin1’).
Pada gambar 4.12 dapat dilihat grafik perbandingan antara laju aliran air setelah melewati venturi (Fin2) dengan laju aliran
air setelah diolah dengan menggunakan data rekonsilasi (Fin2’).
Gambar 4.13 Grafik flow out sebelum dan sesudah rekonsiliasi untuk 7 LPM
Pada gambar 4.13 dapat dilihat grafik perbandingan antara laju aliran air pada mixing piping (Fout) dengan laju aliran air
setelah diolah dengan menggunakan data rekonsilasi (Fout’).
Pada gambar 4.14 dapat dilihat grafik perbandingan antara laju aliran air setelah melewati orifice (Fin1) dengan laju aliran
air setelah diolah dengan menggunakan data rekonsilasi (Fin1’).
Gambar 4.15 Grafik flow in 2 sebelum dan sesudah rekonsiliasi untuk 10 LPM
Pada gambar 4.15 dapat dilihat grafik perbandingan antara laju aliran air setelah melewati venturi (Fin2) dengan laju aliran
air setelah diolah dengan menggunakan data rekonsilasi (Fin2’).
Pada gambar 4.16 dapat dilihat grafik perbandingan antara laju aliran air pada mixing piping (Fout) dengan laju aliran air
setelah diolah dengan menggunakan data rekonsilasi (Fout’).
4.2 Pembahasan
Pengambilan data rekonsilasi didapat dari pembacaan tiga sensor perbedaan tekanan (mpx5050dp) yang kemudian dikonversi menjadi laju aliran yang terdapat pada plant. Sensor pertama diletakkan pada orifice , sensor kedua diletakkan pada venturi dan sensor ketiga diletakkan setelah melewati
penggabungan antara orifice dan venturi yaitu diletakkan di
elbow, didapat informasi bahwa alat ukur elbow memiliki
karakteristik statis hysterisis sebesar 1,04%, non-linieritas =
14,24%, dan error = 0,16. Pada pengukuran elbow tabs ini
terdapat pengaruh belokan yang terjadi sehingga menyebabkan gesekan pipa saat aliran melewati elbow tabs ini sehingga hasil
pengukuran dengan menggunakan metode elbow ini memiliki
keakurasian lebih baik dari 5%. Oleh sebab itu hasil range ukur
elbow tabs pada rancang bangun yang ada, perbedaan tekanan yang ada dapat dibaca oleh sensor dengan perbedaan tekanan yang kecil. Dan dari pengukuran laju aliran dengan
mengguanakan elbow tabs ini range ukurnya yaitu antara 2,769 –
12,41 LPM. Dari range ini Elbow tabs dapat mengukur laju aliran
dengan tingkat keakurasian sebesar 83%.
Pada saat aliran melewati orifice maka sensor akan membaca perbedaan tekanan yang pada p1 dan p2 sehingga nilai perbedaan tekanan bisa didapatkan yang kemudian untuk merubahnya dari perbedaan tekanan menjadi laju aliran
digunakan persamaan Q=Cv√Delta P, dimana nilai cv dapat
diketahui dengan persamaan regresi. Kemudian setelah nilai laju aliran didapat maka dapat dikethui berapa nilai laju aliran yang
melewati metode pengukuran yaitu orifice, begitu pula untuk
43
BAB V PENUTUP5.1. Kesimpulan
Berdasarkan hasil penelitian laju aliran (flowrate) pada
rancang bangun sistem pengendalian flow dan data reconciliation
pada mixing piping, dapat disimpulkan, yaitu :
a. Pada sistem monitoring flowrate memiliki sensitivitas
hingga 0,92 GPM dengan presentase akurasi mencapai 83,5%
b. Nilai perbedaan tekanan yang dihasilkan pada setiap
metode pengukuran selisihnya tidak begitu banyak yaitu mencapai 0,1-0,5
c. Data saat setelah dilakukan teknik rekonsiliasi terlihat
jauh lebih baik sehingga dapat memenuhi hukum
kesetimbangan massa dan energi atau mass balance
dibanding saat sebelum dilakukan rekonsiliasi.
5.2. Saran
Adapun saran untuk tugas akhir yang telah dilakukan adalah sebagai berikut :
a. Pembuatan mekanik untuk rancang bangun aliran ini
dapat diperbaiki dengan diberikan diameter pipa yang sama untuk menghindari adanya loss pada setiap pergantian antara orifice, venturimeter, elbow tabs.
DAFTAR PUSTAKA
[1] Septriani Dwie Saputri. 2009. “Rancang Bangun
Venturimeter berbasis mikrokontroller”. Skripsi Universitas Indonesia. Jakarta.
[2] Munson, Donald F.Young, Theodore H.Okiishi. 2003.
“Mekanika Fluida 1stEdition”. Jakarta : Erlangga.
[3] Michael Anthony Crabtree. 2009. “Industrial Flow
Measurement”. Journal The University of Huddersfield. Inggris
[4] Raswari. 1986. “Teknologi dan Perencanaan Sistem
Perpipaan”. Jakarta:Penerbit Universitas Indonesia.
[5] McCabe L Warren, Smith C Julian, and Herriot Peter, 1985.
“Operasi Teknik Kimia Jilid 1 Edisi Keempat”.Jakarta: Erlangga.
[6] Brater, E.F. and H.W.King. 1976. “Handbook of Hydraulics 4th edition”.Inggris :McGraw-Hill.
[7] M. White, Frank dan Hariandja, Manahan. 1988. “Mekanika Fluida 4th edition ”. Jakarta :Erlangga.
[8] DataSheet. MPX2010. Rev13. 10/2008. http://www.freescale.com/support
[9] Bentley, John P. 2005. ”Principles of Measurement System 4th Edition”. London : Prentice Hall.
[10] KAN. 2013. “Pedoman Evaluasi dan Pelaporan
Ketidakpastian Pengukuran”. Pedoman KAN DP.01.23. Jakarta.
[11] Arduino. 2016. Arduino Uno,
<http://arduino.cc/en/Main/ArduinoBoardUno>
[12]Hidayatullah, Syarif. 2013. “Pemrograman Visual
LAMPIRAN C
LISTING PROGRAM PADA CV-AVR
/**************************************************** ***
This program was created by the CodeWizardAVR V3.12 Advanced Automatic Program Generator
© Copyright 1998-2014 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
AVR Core Clock frequency: 12.000000 MHz Memory model : Small
// Alphanumeric LCD functions #include <alcd.h>
int a,b,c,d,i;
// Declare your global variables here
// Standard Input/Output functions #include <stdio.h>
// Voltage Reference: AVCC pin
#define ADC_VREF_TYPE ((0<<REFS1) | (1<<REFS0) | (0<<ADLAR))
// Read the AD conversion result
unsigned int read_adc(unsigned char adc_input) {
ADMUX=adc_input | ADC_VREF_TYPE;
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Start the AD conversion ADCSRA|=(1<<ADSC);
// Wait for the AD conversion to complete while ((ADCSRA & (1<<ADIF))==0); ADCSRA|=(1<<ADIF);
return ADCW; }
void main(void) {
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRA=(0<<DDA7) | (0<<DDA6) | (0<<DDA5) | (0<<DDA4) | (0<<DDA3) | (0<<DDA2) | (0<<DDA1) | (0<<DDA0);
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) | (0<<PORTA3) | (0<<PORTA2) | (0<<PORTA1) | (0<<PORTA0);
// Port B initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (0<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (0<<PORTB4) | (0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) | (0<<PORTB0);
// Port C initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRC=(0<<DDC7) | (0<<DDC6) | (0<<DDC5) | (0<<DDC4) | (0<<DDC3) | (0<<DDC2) | (0<<DDC1) | (0<<DDC0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTC=(0<<PORTC7) | (0<<PORTC6) | (0<<PORTC5) | (0<<PORTC4) | (0<<PORTC3) | (0<<PORTC2) | (0<<PORTC1) | (0<<PORTC0);
// Port D initialization
// Function: Bit7=In Bit6=In Bit5=Out Bit4=Out Bit3=In Bit2=In Bit1=In Bit0=In
DDRD=(0<<DDD7) | (0<<DDD6) | (1<<DDD5) | (1<<DDD4) | (0<<DDD3) | (0<<DDD2) | (0<<DDD1) | (0<<DDD0);
// State: Bit7=T Bit6=T Bit5=0 Bit4=0 Bit3=T Bit2=T Bit1=T Bit0=T
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=0xFF // OC0 output: Disconnected
TCCR0=(0<<WGM00) | (0<<COM01) | (0<<COM00) | (0<<WGM01) | (0<<CS02) | (0<<CS01) | (0<<CS00); TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: 1500.000 kHz
// Mode: Ph. correct PWM top=ICR1 // OC1A output: Non-Inverted PWM // OC1B output: Non-Inverted PWM // Noise Canceler: Off
// Input Capture on Falling Edge // Timer Period: 20 ms
// Output Pulse(s):
// OC1A Period: 20 ms Width: 0 us // OC1B Period: 20 ms Width: 0 us // Timer1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off
TCCR1A=(1<<COM1A1) | (0<<COM1A0) | (1<<COM1B1) | (0<<COM1B0) | (1<<WGM11) | (0<<WGM10);
OCR1BL=0x00;
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer2 Stopped // Mode: Normal top=0xFF // OC2 output: Disconnected ASSR=0<<AS2;
TCCR2=(0<<PWM2) | (0<<COM21) | (0<<COM20) | (0<<CTC2) | (0<<CS22) | (0<<CS21) | (0<<CS20); TCNT2=0x00;
OCR2=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization TIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) |
(0<<OCIE1A) | (0<<OCIE1B) | (0<<TOIE1) | (0<<OCIE0) | (0<<TOIE0);
// External Interrupt(s) initialization // INT0: Off
// INT1: Off // INT2: Off
MCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) | (0<<ISC00); MCUCSR=(0<<ISC2);
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: On
// USART Transmitter: On // USART Mode: Asynchronous // USART Baud Rate: 9600
UCSRC=(1<<URSEL) | (0<<UMSEL) | (0<<UPM1) | (0<<UPM0) | (0<<USBS) | (1<<UCSZ1) | (1<<UCSZ0) | (0<<UCPOL);
UBRRH=0x00; UBRRL=0x4D;
// Analog Comparator initialization // Analog Comparator: Off
// The Analog Comparator's positive input is // connected to the AIN0 pin
// The Analog Comparator's negative input is // connected to the AIN1 pin
ACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) | (0<<ACIE) | (0<<ACIC) | (0<<ACIS1) | (0<<ACIS0);
// ADC initialization
// ADC Clock frequency: 750.000 kHz // ADC Voltage Reference: AVCC pin // ADC Auto Trigger Source: ADC Stopped ADMUX=ADC_VREF_TYPE;
ADCSRA=(1<<ADEN) | (0<<ADSC) | (0<<ADATE) | (0<<ADIF) | (0<<ADIE) | (1<<ADPS2) | (0<<ADPS1) | (0<<ADPS0);
SFIOR=(0<<ADTS2) | (0<<ADTS1) | (0<<ADTS0);
// SPI initialization // SPI disabled
SPCR=(0<<SPIE) | (0<<SPE) | (0<<DORD) | (0<<MSTR) | (0<<CPOL) | (0<<CPHA) | (0<<SPR1) | (0<<SPR0);
// TWI initialization // TWI disabled
TWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) | (0<<TWIE);
b=0; c=0; d=1; } if (a==1) {
OCR1A = 942; OCR1B = 945; }
else if (b==1) {
OCR1A = 481; OCR1B = 1109; }
else if (c==1) {
OCR1A = 657; OCR1B = 1222; }
else if (d==1) {
OCR1A = 601; OCR1B = 1279; }
LAMPIRAN D
LISTING PROGRAM REKONSILIASI PADA MATLAB
clc clear all
f_in1=xlsread('3 LPM.xlsx','Sheet1','c6:c35'); f_in2=xlsread('3 LPM.xlsx','Sheet1','d6:d35'); f_out=xlsread('3 LPM.xlsx','Sheet1','e6:e35');
std_in1=std(f_in1); std_in2=std(f_in2); std_out=std(f_out);
for i=1:30
y=[f_in1(i,1);f_in2(i,1);f_out(i,1)];
V=[std_in1^2 0 0;0 std_in2^2 0;0 0 std_out^2]; A=[1 1 -1];
yhat=y-V*A'*inv(A*V*A')*A*y;
balance_before(i,1)= f_in1(i,1)+f_in2(i,1)-f_out(i,1);
hasil_rekon(i,1)=yhat(1); hasil_rekon(i,2)=yhat(2); hasil_rekon(i,3)=yhat(3);
balance_after(i,1)= hasil_rekon(i,1)+hasil_rekon(i,2)-hasil_rekon(i,3);
LAMPIRAN E
DATA RECONCILIATION
LAJU ALIRAN PADA
MIXING PIPING
Tabel E1
No GPM sebelum direkonsiliasi sesudah direkonsiliasi Fin1 Fin2 Fout Fin1' Fin2' Fout'
1
3
0,73876 0,55849 0,83086 0,401632 0,507124 0,908756
24 0,6996 0,4992 0,73798 0,366499 0,448448 0,814946
No GPM sebelum direkonsiliasi sesudah direkonsiliasi Fin1 Fin2 Fout Fin1' Fin2' Fout'
1
4
20 0,59636 0,96552 0,67325 0,105309 0,87726 0,982564
16 0,89788 0,9857 0,76451 0,01902 0,98307 1,0021
No GPM sebelum direkonsiliasi sesudah direkonsiliasi Fin1 Fin2 Fout Fin1' Fin2' Fout'
1
6
12 1,52374 1,42176 1,22469 1,17635 1,16853 2,34488
No GPM sebelum direkonsiliasi sesudah direkonsiliasi Fin1 Fin2 Fout Fin1' Fin2' Fout'
1
7
8 1,92825 1,64244 1,50143 1,30956 1,338519 2,648074
Tabel E7
No GPM sebelum direkonsiliasi sesudah direkonsiliasi Fin1 Fin2 Fout Fin1' Fin2' Fout'
1
9
2,12426 1,90939 2,00035 1,904822 1,345823 3,250644
2 2,15389 1,90501 1,91602 1,922626 1,311071 3,233696
10 2,17168 2,093063 2,13539 1,941875 1,502873 3,444748
11 2,20769 2,091238 2,29457 1,991375 1,535693 3,527068
12 2,19607 2,089594 1,97144 1,946314 1,448163 3,394477
13 2,19278 2,0919 2,07668 1,954488 1,479911 3,434399
14 2,21884 2,091929 2,33276 2,005369 1,543687 3,549056
15 2,1808 2,093725 2,14004 1,950442 1,502112 3,452554
16 2,09513 2,092413 2,09476 1,869272 1,512359 3,381631
17 2,24694 2,092248 2,16923 2,012753 1,490803 3,503557
18 2,18085 2,091387 1,9998 1,935604 1,461538 3,397142
19 2,12925 2,091272 2,12891 1,903519 1,511543 3,415061
20 2,19204 2,091437 2,0092 1,946595 1,461078 3,407673
21 2,15225 2,090242 2,22162 1,934153 1,530119 3,464272
22 2,03665 2,089659 2,06186 1,81385 1,517458 3,331308
23 2,16052 2,092151 2,15375 1,934 1,510396 3,444395
24 2,22269 2,090841 2,08815 1,982522 1,474035 3,456557
25 2,20088 2,089593 1,96613 1,950032 1,445358 3,395389
26 2,2377 2,089456 2,13934 2,001586 1,483062 3,484648
28 2,21551 2,091321 1,99422 1,965928 1,450337 3,416265
29 2,17282 2,089279 2,06839 1,93607 1,481251 3,417321
30 2,176875 2,052226 2,087793 1,94578 1,458723 3,404503
Tabel E8
No GPM sebelum direkonsiliasi sesudah direkonsiliasi Fin1 Fin2 Fout Fin1' Fin2' Fout' 1
10
24 2,52519 2,3193 2,15805 2,333305 2,30108 4,634386
No GPM sebelum direkonsiliasi sesudah direkonsiliasi Fin1 Fin2 Fout Fin1' Fin2' Fout' 1
11
20 2,4765 2,4483 2,65244 2,460018 2,439915 4,899933
No GPM sebelum direkonsiliasi sesudah direkonsiliasi Fin1 Fin2 Fout Fin1' Fin2' Fout' 1
12
3,40759 2,43846 2,03136 2,505643 2,487877 4,99352
16 3,30545 2,63445 2,3595 2,575248 2,393989 4,969237
No GPM sebelum direkonsiliasi sesudah direkonsiliasi Fin1 Fin2 Fout Fin1' Fin2' Fout'
1
13
![Gambar 2.1 Pengukuran Laju Aliran Dengan Elbow Tabs [6]](https://thumb-ap.123doks.com/thumbv2/123dok/1829937.2102208/33.420.129.297.404.483/gambar-pengukuran-laju-aliran-dengan-elbow-tabs.webp)
![Gambar 2.5 Plat Orifice[6]](https://thumb-ap.123doks.com/thumbv2/123dok/1829937.2102208/37.420.107.312.56.176/gambar-plat-orifice.webp)