TUGAS AKHIR
ALAT UKUR KADAR KEASAMAN
PADA SISTEM
MONITORING
KUALITAS AIR KOLAM IKAN
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
DEMASTIANA SAPUTRI
NIM : 105114048
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
i
TUGAS AKHIR
ALAT UKUR KADAR KEASAMAN
PADA SISTEM
MONITORING
KUALITAS AIR KOLAM IKAN
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
DEMASTIANA SAPUTRI
NIM : 105114048
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
PH MEASUREMENTDEVICE
ON MONITORING SYSTEM OF WATER FISH POND QUALITY
Presented as Partial Fullfillment of Requirements
To Obtain the Sarjana Teknik Degree In Electrical Engineering Study Program
DEMASTIANA SAPUTRI
NIM : 105114048
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
v
PERNYATAAN KEASLIAN KARYA
“Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini
tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta, 14 Agustus 2014
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
Dengan ini aku persembahkan karyaku ini untuk….
1.
Alloh SWT atas semua curahan karunia-Nya serta pembimbing
jalanku
2.
Bapak Suparno atas segala nasehatnya, dukungannya, dan
curahan kasih sayang kepada anaknya ini.
3.
Ibu Sutarti atas kasih sayang , kesabarannya, perhatian yang
tulus, serta tempat berbagi cerita anaknya ini
4.
Rejeki Fajar Tiana seorang adik yang selalu memberiku
pelampisan keisengan kakak
–
kakaknya, seorang yang pemalu
tapi punya kreatifitas yang tak terduga, seorang adik yang
selalu ingin menjaga kakak
–
kakak perempuannya.
6.
Aji Bagus Permadi atas dukungan, pengalaman dan saran
yang diberikan serta perhatian yang selalu diberikan kepada
adiknya ini.
7.
Bapak Martanto, Ibu Wuri, Bapak Piuz, dan Bapak Tri tim
penelitian yang telah memberikan judul ini kepada penulis dan
bantuan hingga tersusunnya dan terselesaikannya tugas akhir
ini.
8.
Teman
–
teman seperjuangku Teknik Elektro 2010 yang selalu
bersama saling berbagi semangat, canda, ejekan, dan motivasi.
9.
Indra Wijaya seorang sahabat, kakak, pacar, teman diskusi,
dan motivator pribadi yang selalu ada berbagi keluh kesah
serta membantu dalam menyelesaikan tugas akhir ini.
10.
Stevanus Hari Wijatmika, Mufied Fauziah, Danang, Eko
wijayatna Putra keempat sahabat yang selalu jadi pendengar
baik dan penghibur dikala kejenuhan tugas akhir datang
.“kegagalan itu bukan bencana yang harus ditangisi tapi
kegagalan itu adalah sesuatu proses pembelajaran menuju
keberhasilan kita”
vii
HALAMAN PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK
KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : Demastiana Saputri
Nomor Mahasiswa : 105114048
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul :
ALAT UKUR KADAR KEASAMAN
PADA SISTEM
MONITORING
KUALITAS AIR KOLAM IKAN
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada
Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam
bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara
terbatas, dan mempublikasikannya di internet atau media lain untuk kepentingan akademis
tanpa perlu meminta ijin dari saya maupun memberikan royalty kepada saya selama tetap
mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta, 14 Agustus 2014
viii
INTISARI
Letak perairan Indonesia yang strategis menjadi salah satu penyebab banyaknya penduduk Indonesia yang bermata pencaharian sebagai pembudidaya ikan air tawar. Dalam budidaya ikan air tawar banyak aspek yang harus diperhatikan , salah satu aspek yang harus diperhatikan adalah kualitas air sebagai media kehidupan ikan. Salah satu parameter kualitas air terpenting berkaitan dengan kadar keasaman perairan. Kadar keasaman pada kualitas air ini akan mempengaruhi pertumbuhan dan perkembangan ikan budidaya. Oleh karena itu penulis bermaksud membuat alat ukur kadar keasaman pada air kolam, untuk mengantisipasi perubahan kadar keasamanan yang terjadi pada air kolam.
Alat ukur kadar keasaman ini menggunakan sensor vernier pH – BTA sebagai sensor kadar keasaman. Range kadar keasaman pada proses pengukuran dapat ditentukan user melalui keypad masukan. Hasil pengukuran dari kadar keasaman akan ditampilkan di LCD character dengan tambahan informasi aman atau tidak aman dari air yang digunakan untuk sampel pengukuran. Alat ukur kadar keasaman yang dibuat juga dilengkapi dengan pembersih sensor yang bekerja setelah pengukuran kadar keasaman selesai. Pembersih sensor ini berfungsi untuk membersihkan sisa sampel hasil pengukuran kadar keasaman.
Alat ukur kadar keasaman ini sudah bekerja dengan baik, dimana alat ukur kadar keasaman ini sudah dapat mengukur beberapa sampel air dengan nilai kadar keasaman yang berbeda – beda. Alat ini juga sudah dapat melakukan pengukuran dengan kadar keasaman tertentu sesuai dengan masukkan user. Error yang dihasil dari alat ukur kadar keasaman ini adalah sebesar 3.35 % dari alat ukur referensi kadar keasaman yang ada dipasaran.
.
ix
ABSTRACT
The strategic location of Indonesia's waters became one of the causes of the large number of residents of Indonesia edged a livelihood as farmers fresh water fish. Freshwater fish farming in many aspects that must be considered, one of the aspects that must be considered is the quality of the water as the medium life of fish. One of the most important water quality parameter related to the levels of acidity of the waters. The levels of acidity in the water quality will affect the growth and development of fish farming. Therefore writers intends to make measuring the levels of acidity in the water of the pool, to anticipate changes in the levels of pH that occurs in pond water.
A measuring instrument that levels using sensor pH – Vernier BTA as a sensor levels of acidity. Range of levels of acidity in the measurement process can be determined by user via the keypad enter. Results of measurements of the levels of acidity will be shown in LCD character with additional information are safe or unsafe water used for sample measurements. A measuring instrument that levels of acidity made also equipped with a motor cleaning a sensor which work after the measurement of levels of acidity done. Motor sensor cleaning function to clean up the rest of the sample results measurement levels of acidity.
A measuring instrument that levels of acidity it's been working properly, where a measuring instrument that levels of acidity has been can measure some samples water with the value of the different levels of acidity . Error of the measuring instrument that levels of acidity this is worth 3.35 % from the measuring instrument that levels of acidity reference.
x
KATA PENGANTAR
Puji dan Syukur penulis panjatkan kepada Alloh SWT karena telah memberikan
berkat-Nya sehingga penulis dapat menyelesaikan skripsi ini dengan baik. Penulis
menyadari bahwa keberhasilan menyelesaikan skripsi ini tidak lepas dari bantuan dan
bimbingan dari berbagai pihak. Oleh karena itu, pada kesempatan ini penulis mengucapkan
terima kasih kepada:
1. Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.
2. Ketua Program Studi Teknik Elektro Universitas Sanata Dharma Yogyakarta.
3. Martanto, S.T., M.T., dosen pembimbing yang dengan penuh pengertian dan
ketulusan hati memberi bimbingan, kritik, saran, serta motivasi dalam penulisan
skripsi ini.
4. B. Wuri Harini, S.T., M.T., dan Ir. Th. Prima Ari Setiyani, M.T., dosen penguji
yang telah memberikan masukan, bimbingan, saran dalam merevisi skripsi ini.
5. Kedua orang tua dan adik – adik saya, atas dukungan, doa, cinta, perhatian, kasih
sayang yang tiada henti.
6. Staff sekretariat Teknik Elektro, atas bantuan dalam melayani mahasiswa.
7. Kawan-kawan seperjuangan angkatan 2010 Teknik Elektro, dan semua kawan yang
mendukung saya dalam mendukung dalam menyelesaikan tugas akhir ini.
8. Semua pihak yang tidak dapat disebutkan satu persatu atas semua dukungan yang
telah diberikan dalam penyelesaian skripsi ini.
Penulis menyadari bahwa dalam penyusunan laporan akhir ini masih mengalami
kesulitan dan tidak lepas dari kesalahan. Oleh karena itu, penulis mengharapkan masukan,
kritik dan saran yang membangun agar skripsi ini menjadi lebih baik. Dan semoga skripsi
ini dapat bermanfaat sebagaimana mestinya.
Penulis
xi
DAFTAR ISI
HALAMAN JUDUL
... iHALAMAN PERSETUJUAN
... iiiHALAMAN PENGESAHAN
... ivPERNYATAAN KEASLIAN KARYA
... vHALAMAN PERSEMBAHAN DAN MOTTO HIDUP
... viLEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA
ILMIAH UNTUK KEPENTINGAN AKADEMIS
... viiINTISARI
... viiiABSTRACT
... ixKATA PENGANTAR
... xDAFTAR ISI
... xiDAFTAR GAMBAR
... xivDAFTAR TABEL
... xviBAB I PENDAHULUAN
1.1. Latar Belakang ... 11.2. Tujuan dan Manfaat Penelitian ... 3
1.3. Batasan Masalah ... 3
1.4. Metodologi Penelitian ... 3
BAB II DASAR TEORI
2.1. Derajat Keasaman (pH) ... 62.2. Air Kolam Ikan ... 7
2.3. Sensor PH – BTA Vernier ... 9
2.4. Mikrokontroler ATMega32L ... 11
2.5. ADC ( Analog Digital Converter ) ... 12
2.6. LCD ( Liquid Crystal Display ) ... 15
2.7. Komunikasi Serial RS - 485 ... 16
xii
3.2.2. Perancangan Mekanik Autosampling ... 29
3.2.3. Perancangan Sensor pH Meter ... 30
3.2.4. Perancangan LCD Character ... 31
3.2.5. Perancangan Driver Motor ... 32
3.2.6. Perancangan Keypad 4 x 4... 32
3.2.7. Perancangan Limit Switch ... 34
3.2.8. Perancangan Minimum Sistem Mikrokontroler ATMega32 ... 35
3.2.9. Perancangan Rangkaian Catu Daya ... 36
BAB IV HASIL DAN PEMBAHASAN
4.1. Bentuk Fisik Alat ... 454.2.2. Pengujian Sensor pH Dengan pH Tertentu Pada Ikan ... 53
4.2.3. Pengujian Motor Pembersih Sensor ... 55
4.3. Subsistem Elektronik ... 56
xiii
4.4.1. Pengujian Minimum Sistem ... 58
4.4.2. Pengujian Rangkaian Sensor ... 59
4.4.3. Pengujian Catu Daya ... 60
4.5. Pengujian Pengiriman Data ... 61
4.6. Pengujian ADC ... 62
4.7. Pengujian Software ... 65
4.7.1. Pengujian Program Pengukuran Kadar Keasaman Air... 65
4.7.2. Pengujian Program Pengukuran Kadar Keasaman Dengan Batas Kadar Keasaman Tertentu ... 68
4.6.2. Pengujian Program Motor Penetralan ... 75
BAB V KESIMPULAN DAN SARAN
5.1. Kesimpulan ... 795.2. Saran ... 79
DAFTAR PUSTAKA
... 80LAMPIRAN A
Pengujian Sampel dengan Alat Ukur Kadar Keasaman ... L1LAMPIRAN B
Hasil Pengujian Alat Hasil Perancangan Dengan Batas KadarKeasaman yang Berbeda ... L9
LAMPIRAN C
Listing Program Mikrokontroler ... L15LAMPIRAN D
Mekanisme Penggunaan Alat Ukur Kadar Keasaman ... L22LAMPIRAN E
Rangkaian Keseluruhan Mikrokontroler ... L25xiv
DAFTAR GAMBAR
Halaman
Gambar 1.1. Blok Diagram Sistem Monitoring Kualitas Air Kolam Ikan ... 4
Gambar 2.1. Sensor pH – BTA Vernier ... 10
Gambar 2.2. Konfigurasi Pin Sensor pH – BTA Vernier ... 10
Gambar 2.3. Konfigurasi pin ATMega32 ... 12
Gambar 2.4. Blok ADC ... 13
Gambar 2.5. LCD 2x16 ... 15
Gambar 2.6. Konfigurasi Pin IC RS485 ... 17
Gambar 2.7. Konfigurasi Jaringan Half – Duplex RS485 ... 18
Gambar 2.8. Kaki IC 78xx ... 19
Gambar 2.9. Rangkaian Regulator Tegangan +12 V ... 19
Gambar 2.10. Motor DC ... 21
Gambar 2.11. Konstruksi Motor DC ... 21
Gambar 2.12. Penampang IC L298 ... 22
Gambar 2.13. Keypad 4 x 4 ... 23
Gambar 2.14. Rangkaian Limit Switch ... 24
Gambar 2.15. Simbol Limit Switch ... 24
Gambar 2.16. Limit Switch ... 24
Gambar 3.1. Blok Diagram Perancangan Subsistem Pengukuran Kadar Keasaman . 26 Gambar 3.2. Kotak Mekanik Sensor Tampak Samping ... 28
Gambar 3.3. Kotak Mekanik Pembersih Sensor Tampak Depan ... 28
Gambar 3.4. Kotak Mekanik Pembersih Sensor Tampak Samping ... 29
Gambar 3.5. Tempat Autosampling Tampak Atas ... 29
Gambar 3.6. Tempat Autosampling Tampak Dalam ... 30
Gambar 3.7. Rangkaian Sensor pH Meter ... 31
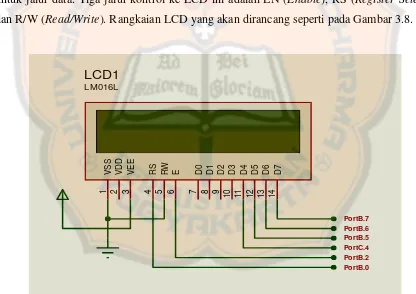
Gambar 3.8. Rangkaian LCD Character 16 x 2 ... 31
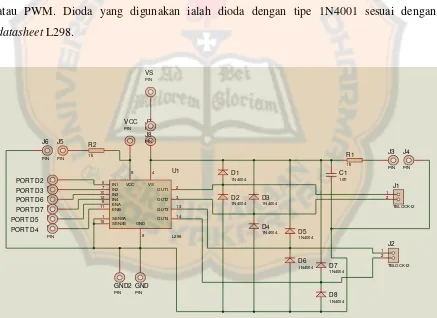
Gambar 3.9. Rangkaian Driver Motor ... 32
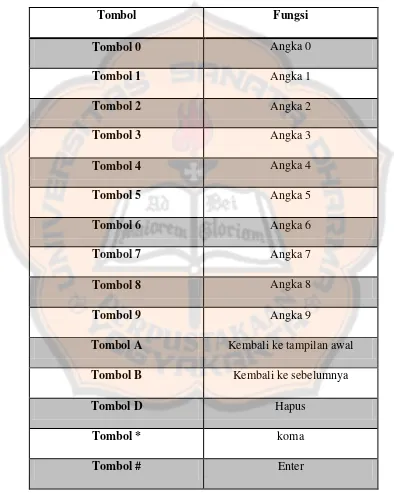
Gambar 3.10. Rancangan Keypad 4 x 4 ... 34
Gambar 3.11. Rancangan Limit Switch ... 34
xv
Gambar 3.13. Rangkaian Regulator ... 38
Gambar 3.14. Flowchart Program ... 40
Gambar 3.15. Flowchart Program Kendali Motor Pembersih ... 41
Gambar 3.16. Grafik Hubungan Antara Vout Sensor pH dengan Nilai pH Terukur ... 42
Gambar 3.17. Grafik Hubungan Antara Nilai pH Terukur dengan Nilai ADC ... 43
Gambar 3.18. Grafik Hubungan Antara Nilai ADC dengan Nilai pH ... 44
Gambar 4.1. Kotak Sensor ... 46
Gambar 4.2. Mekanik Sensor Tampak Dalam ... 47
Gambar 4.3. Alat Pembersih Sensor ... 48
Gambar 4.4. Autosampling Tampak Atas... 49
Gambar 4.5. Autosampling Tampak Belakang ... 49
Gambar 4.6. Grafik Hubungan Antara Waktu Pembersihan Sensor dengan Nilai pH terukur …... ... 55
Gambar 4.7. Subsistem Elektronik Alat Ukur Kadar Keasaman ... 56
Gambar 4.8. Rangkaian Driver ... 57
Gambar 4.9. Hasil Pengujian Rangkaian Minimum Sistem Mikrokontroler ... 58
Gambar 4.10. Grafik Hubungan Antara Vout Sensor dengan Nilai pH Terukur ... 59
Gambar 4.11. Tampilan Hasil Pengukuran Kadar Keasaman Alat Hasil Perancangan ... 61
Gambar 4.12. Tampilan LCD Character Master ... 62
Gambar 4.13. Rangkaian Pengujian ADC ... 62
Gambar 4.14. Tampilan Awal Alat Ukur Kadar Keasaman ... 67
Gambar 4.15. Tampilan Hasil Pengukuran Alat Ukur Kadar Keasaman ... 67
Gambar 4.16. Pilihan Menu A ( pH Jenis Ikan ) ... 74
Gambar 4.17. Pilihan Menu C ( Pengukuran pH ) ... 74
Gambar 4.18. Tampilan Instruksi Masukkan Pilihan ... 75
Gambar 4.19. Posisi Awal Kotak Sensor Saat pengukuran ... 77
Gambar 4.20. Posisi Kotak Sensor Setelah Pengukuran ... 77
xvi
DAFTAR TABEL
Halaman
Tabel 2.1. Hubungan antara pH Air dan Kehidupan Hewan ( Ikan ) Budidaya ... 6
Tabel 2.2. Derajat Keasaman ( pH ) Berdasarkan Jenis Ikan ... 7
Tabel 2.3. Standar Kualitas Air Kolam ... 8
Tabel 2.4. Fungsi Pin LCD 2x16 ... 15
Tabel 2.5. Tabel Konfigurasi IC RS485 ... 17
Tabel 2.6. Jenis – Jenis IC Regulator 78xx ... 19
Tabel 2.7. Tabel Logika Prinsip Kerja IC L298 ... 22
Tabel 3.1. Fungsi Tombol Keypad 4x4 ... 32
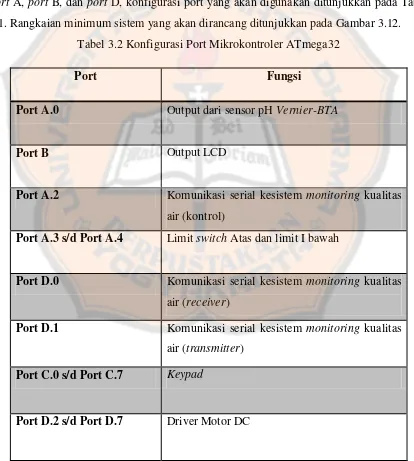
Tabel 3.2. Konfigurasi Port Mikrokontroler ATMega32 ... 35
Tabel 4.1. Keterangan Gambar Kotak Sensor ... 45
Tabel 4.2. Hasil Rata – Rata Pengujian Sensor dengan Sampel Tertentu ... 51
Tabel 4.3. Data Pengukuran Kadar pH dengan Batas pH = 5 – 6 ... 53
Tabel 4.4. Data Hasil Perbandingan Perhitungan dan Pengukuran Tegangan Keluaran Dari Sensor pH Hasil Perancangan ... 59
Tabel 4.5. Hasil Pengujian Rangkaian Catu Daya ... 60
Tabel 4.6. Data Hasil Pengujian Nilai Konversi ADC ... 62
Tabel 4.7. Data Hasil Pengujian Tegangan Masukkan ADC ... 63
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Indonesia merupakan negara kepulauan yang berbentuk republik, terletak di
kawasan Asia Tenggara. Indonesia memiliki lebih kurang 17.000 buah pulau dengan luas
daratan 1.922.570 km2 dan luas perairan 3.257.483 km2[1]. Dampak dari luas perairan
Indonesia yang tiga kali lipat lebih besar dari luas daratan ini, hal ini menyebabkan
Indonesia mempunyai sumber daya alam peraiaran yang kaya dan melimpah.Letak
Indonesia yang strategis ini menyebabkan banyak masyarakat yang bermata pencaharian
dalam bidang usaha budidaya ikan air tawar.Dalam usaha budidaya ikan air tawar ini
banyak hal yang harus diperhatikan untuk menjaga kelangsungan hidup ikan air tawar,
salah satunya adalah kualitas air yang digunakan sebagai media budidaya ikan air tawar.
Kualitas air yang digunakan merupakan faktor yang cukup penting dalam usaha budidaya
ikan air tawar, hal ini berkaitan dengan pertumbuhan dan kelangsungan hidup organisme
perairan.
Kualitas air yang digunakan berhubungan dengan kandungan kimia yang ada
didalamnya. Kelayakan air dapat digunakan ataupun tidak dapat terlihat dari berapa banyak
kandungan kimia yang ada didalamnya. Setiap makhluk hidup memerlukan kandungan
dalam air yang relatif berbeda - beda antara satu dengan yang lainnya, sehingga kualitas air
pun juga bersifat relatif bagi suatu makhluk hidup dengan makhluk hidup lainnya. Analisis
kualitas air mencakup unsur fisika, kimia, dan biologi. Unsur fisika berupa sifat-sifat fisika
air seperti suhu, kejernihan, kekentalan, cahaya, suara, getaran serta berat jenis. Unsur
kimia berupa sifat-sifat kimiawi air seperti pH, kadaroksigen terlarut, karbondioksida
terlarut, alkalinitas dan lain-lain. Unsur biologi berupa sifat-sifat biologi seperti keadaan
organismenya, pemakai dan pengurai. Ketiga unsur pokok tersebut tergantung pada
sumber alam pokok yaitu sinar matahari dan iklim.[2]
Berkaitan dengan kualitas air yang digunakan dalam usaha budidaya air tawar salah
satu parameter yang cukup penting adalah kadar keasaman yang terkandung dalam air
yang digunakan sebagai media budidaya ikan air tawar. Parameter kadar keasaman ini
dibudidayakan. Selain itu kadar keasaman (pH) juga akan mempengaruhi beberapa
kandungan material yang terdapat didalam air yaitu kadar karbon dioksida (CO2) dan
oksigen (O2) terlarut.
Berdasarkan dari permasalahan diatas, penulis ingin membuat alat ukur kadar
keasaman pada kolam ikan air tawar. Alat ini nantinya akan digunakan untuk memonitor secara langsung kadar keasaman sehingga dapat digunakan untuk mengantisipasi
perubahan yang terjadi pada kandungan air yang digunakan. Alat ini akan digabungkan
dengan beberapa alat yang juga berperan dalam monitoring kualitas air kolam ikan air tawar.
Ada beberapa peneliti yang sudah membuat alat ukur tentang kadar keasaman
antara lain yang dilakukan oleh Adi Tomi dengan judul penelitian “ Sistem Monitoring PH
dan Suhu Air dengan Transmisi Data Nirkabel “[3] menggunakan metode penambahan
larutan asam dan basa pada sampel air yang akan diukur, selain itu peneliti menggunakan
ATmega 8 sebagai pengontrol sistem, sedangkan alat yang akan dibuat penulis
menggunakan sensor PH-BTA Vernier. Sensor ini akan langsung mengukur kadar keasaman air secara langsung tanpa tambahan cairan asam maupun basa. Penulis
menggunakan mikrokontroler ATMega32 sebagai pengontrol sistem. Output dari sistem
akan ditampilkan melalui LCD karakter dalam bentuk nilai kadar keasaman. Penulis juga
membandingkan data hasil pengukuran sampel air dengan alat ukur yang sudah ada
dipasaran sebagai pembanding dan keakuratan nilai kadar keasaman. Data dari hasil
pengukuran sistem nantinya akan dikirim secara serial dengan MAX 485 ke PC pengguna
sebagai monitoring keseluruhan dari sistem monitoring kualitas air kolam ikan air tawar. Penelitian lain yang berkaitan dengan alat ukur kadar keasaman adalah penelitian
yang berjudul “ Aplikasi Mikrokontroler ATMEGA32 Untuk Pengukuran Tingkat Keasaman Air Pada Sistem Monitoring Kualitas Air “ [4] oleh Antonius Tri Priantoro, dkk. Perbedaan penelitian yang sudah ada dengan alat yang akan dibuat penulis terletak
pada adanya penambahan keypad masukkan pada perancangan alat oleh penulis. Keypad
masukkan ini digunakan untuk mengatur batasan kisaran nilai kadar keasaman untuk setiap
ikan, selain itu alat yang dirancang oleh penulis juga dilengkapi dengan motor pembersih
1.2.
Tujuan dan Manfaat
Tujuan penelitian dalam tugas akhir ini adalah menghasilkan suatu alat ukur
keasaman untuk mengetahui hasil pengukuran kadar keasaman pada kolam ikan air tawar
.Manfaat dari penelitian ini adalah untuk digunakan para pembudidaya ikan air tawar
dalam monitoring kualitas air yang digunakan untuk budidaya ikan, sehingga dapat memantau perkembangan dan pertumbuhan ikan yang dibudidayakan secara maksimal
1.3.
Batasan Masalah
Batasan masalah dalam penelitian ini adalah :
a. Alat ukur kadar keasaman merupakan bagian dari sistem monitoring kualitas air kolam ikan air tawar.
b. Menggunakan sensor PH-BTA Vernier dengan jangkauan kadar keasaman dari 0 – 14 .
c. Pengolah data menggunakan mikrokontroler AVR ATMega32
d. Air yang digunakan sebagai objek penelitian adalah air tawar yang digunakan
untuk kolam budidaya ikan air tawar.
e. Menggunakan LCD Karakter 16 X 2 untuk menampilkan data hasil pengukuran.
f. Data hasil output disediakan untuk dapat dikirim dengan menggunakan komunikasi
serial MAX 485.
g. Sampel air ditempatkan pada tempat autosampling sistem monitoring kualitas air kolam ikan air tawar.
1.4.
Metodologi Penelitian
Metodologi yang digunakan dalam penelitian tugas akhir ini adalah sebagai berikut:
a. Pengumpulan bahan – bahan referensi mengenai sebagian atau keseluruhan sistem
dari buku teks, jurnal, internet dan lain-lain.
b. Perancangan sistem hardware dan software. Tahap ini bertujuan untuk mencari bentuk rancangan yang tepat untuk sistem yang akan dibuat dengan
mempertimbangankan berbagai aspek permasalahan dan kebutuhan yang
ditentukan dari sistem yang akan dibuat.
pengukuran, termasuk didalamnya pengukuran kadar keasaman air yang bereada
dalam dalam garis putus – putus . Sensorvernier PH-BTAsebagai sensor pH mengukur kadar keasaman dari air sampel yang digunakan oleh sistem monitoring
kualitas air, hasil pengukuran dari sensor akan diolah mikrokontroler melalui
channel ADC. Keluaran sensor yang berupa tegangan akan dikonversi mikrokontroler menjadi kadar keasaman. Data keluaran dari mikrokontroler akan
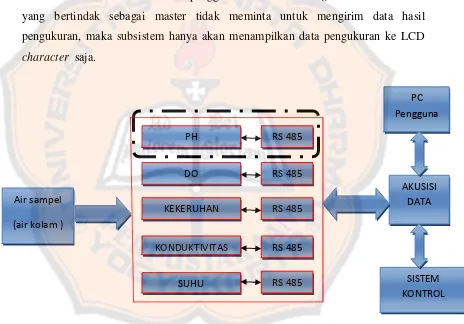
ditampilkan ke LCD character dan data disediakan umtuk dikirimkan ke sistem akusisidata dalam sistem monitoring kualitas air kolam ikan air tawar setelah ada permintaan dari sistem dengan menggunakan komunikasi serial MAX485 yang
kemudian akan dikirimkan ke PC pengguna sistem monitoring. Jika sistem akusisi yang bertindak sebagai master tidak meminta untuk mengirim data hasil
pengukuran, maka subsistem hanya akan menampilkan data pengukuran ke LCD
character saja.
Gambar 1.1.Blok Diagram Sistem Monitoring Kualitas Air Kolam Ikan
d. Proses Pengambilan data. Pengambilan data dilakukan dengan melakukan
pengukuran secara langsung air sampel dan dengan sampel larutan pH
menggunakan sensor PH-BTA Vernier. Data yang sudah diambil akan dibandingkan dengan data yang diambil dengan alat ukur yang sudah ada sebagai
pembanding dan validasi hasil pengukuran sensor.
e. Analisa dan penyimpulan hasil percobaan. Analisa data dengan membandingkan
data yang didapatkan dari pengukuran sensor PH-BTA Vernier dengan pengukuran dengan alat ukur kadar keasaman yang sudah ada dipasaran. Penyimpulan hasil
6
BAB II
DASAR TEORI
Pada bab ini berisikan beberapa landasan dasar teori yang digunakan penulis
sebagai dasar dalam perancangan alat ukur kadar keasaman air pada kolam ikan air tawar.
Landasan dasar teori yang digunakan penulis antara lain menjelaskan tentang derajat
keasaman (pH), air kolam ikan, sensor PH-BTA Vernier, Mikrokontroler ATMega32L,
ADC (Analog Digital Converter), LCD (Liquid Crystal Display), rangkaian regulator, dan Komunikasi Serial RS-485.
2.1. Derajat Keasaman (pH)
Derajat keasaman air yang disebut juga pH ( Puissance negative de Hidrogen ), dinyatakan dalam angka 1 sampai 14. Derajat keasaman (pH) adalah log 10 (1/(H+)),
dimana (H+ ) adalah konsentrasi ion hidrogen dalam nol per liter. Dalam hal ini aspek yang
diukur adalah kemampuan suatu larutan air dalam memberikan ion hidrogen[5]. Derajat
keasaman memiliki hubungan yang sangat erat dengan kehidupan hewan (ikan) budidaya
seoerti yang ditampilkan pada Tabel 2.1. dibawah ini.
Tabel 2.1. Hubungan antara pH Air dan Kehidupan Hewan (ikan) Budidaya [6]
pH air Kondisi Kultur
< 4.5 Air bersifat toksik
5 – 6.5 Pertumbuhan ikan terhambat; pengaruh pada ketahanan tubuh
6.5 – 9 Pertumbuhan optimal
>9.0 Pertumbuhan ikan terhambat
Derajat keasaman (pH) merupakan faktor pembatas pada pertumbuhan ikan dan
jasad renik lainnya (plankton, zooplankton, dll). Nilai derajat keasaman (pH) perairan yang
sangat rendah (sangat asam) dapat menyebabkan kematian pada ikan. Gejala yang
diperlihatkan adalah gerakan ikan tidak teratur, tutup insang bergerak sangat aktif, dan ikan
berenang sangat cepat dipermukaan air. Demikian pula, nilai derajat keasaman (pH) yang
tinggi menyebabkan pertumbuhan ikan terhambat. Perairan yang asam juga berpengaruh
Kisaran derajat keasaman (pH) perairan yang cocok untuk budi daya ikan
diperairan umum tergantung pada jenis ikan yang dipelihara. Sebab, setiap jenis ikan
menghendaki kisaran pH antara 5 – 8,7. Pada kisaran pH tersebut cukup memenuhi syarat
untuk kehidupan ikan. Derajat keasaman (pH) perairan yang cocok untuk pertumbuhan
optimal beberapa jenis ikan air tawar maupun ikan air payau dapat dilihat pada Tabel 2.2.
Tabel 2.2. Derajat Keasaman (pH) Berdasarkan Jenis Ikan [7]
No. Jenis Ikan Derajat Keasaman (pH)
1. Ikan Patin 5 – 6
2. Ikan Jelawat 5 – 7
3. Ikan Betok 4,5 – 6
4. Ikan Gabus 7 – 7,59
5. Ikan Barubara 7,5 – 8
6. Ikan Kakap 7,5 – 8,5
7. Ikan Kerapu 7,5 – 9
8. Ikan Bandeng 7,5 – 8,5
9. Ikan Mas 7,5 – 8,5
10. Ikan Gurami 6,5 – 8,5
11. Ikan Nila 7 – 8
12. Kepiting Bakau 6,5 – 8,5
13. Ikan Sepat Siam 7 – 8
Kadar CO2 (Karbondioksida) yang terlarut dalam perairan berpengaruh terhadap
pergoncangan pH suatu perairan. Kadar CO2 terlarut yang tinggi dapat meningkatkan
keasaman air (nilai pH air rendah). Kadar CO2 terlarut tinggi umumnya terjadi pada dini
hari (pagi-pagi sekali), sehingga pH air akan rendah. Namun, pH akan kembali normal
pada siang hari karena kadar CO2 terlarut turun yang disebabkan oleh asimilasi tumbuh –
tumbuhan hijau perairan.[7]
2.2. Air Kolam Ikan
Air merupakan unsur zat terpenting dalam kehidupan makhluk hidup di dunia ini.
dengan rumus kimia H2O yaitu satu molekul air tersusun atas dua atom hidrogen yang
terikat secara kovalen pada satu atom oksigen. Air bersifat tidak berwarna, tidak berasa,
dan tidak berbau pada kondisi standar, yaitu pada tekanan 100 kPa (1 bar)
dan temperatur 273,15K (0 °C).[8]
Kolam merupakan lahan yang dibuat untuk menampung air dalam jumlah tertentu
sehingga dapat dipergunakan untuk pemeliharaan ikan dan atau hewan air lainnya.
Berdasarkan pengertian teknis, kolam merupakan suatu perairan buatan yang luasnya
terbatas dan sengaja dibuat manusia agar mudah dikelola dalam hal pengaturan air, jenis
hewan budidaya, dan target produksinya. Kolam selain sebagai media hidup ikan juga
harus dapat berfungsi sebagai sumber makanan alami bagi ikan, artinya kolam harus
berpotensi untuk dapat menumbuhkan makanan alami. [5]
Air kolam ikan adalah suatu media yang digunakan sebagai tempat ikan budidaya
untuk hidup dan berkembang didalamnya. Sebagai salah unsur terpenting dalam proses
budidaya ikan, air kolam yang digunakan harus memenuhi beberapa standar kualitas air
untuk menunjang proses pertumbuhan dan perkembangan ikan budidaya.
Hal – hal yang harus diperhatikan berkaitan dengan kualitas air meliputi
temperature (suhu), derajat keasaman (pH), kadar Oksigen (O2) terlarut, kadar ammonia
(NH3), kadar Karbondioksida (CO2), kadar Nitrogen (NO2), kandungan bahan organik, dan
kandungan zat – zat beracun. Kualitas air diperairan sangat berpengaruh terhadap
kehidupan (perkembangan dan pertumbuhan) ikan dan organisme lainnya yang bermanfaat
menyuburkan perairan (jasad renik dan tumbuhan). Kualitas air yang buruk dapat
menghambat pertumbuhan ikan. Seringkali menimbulkan kematian pada ikan [7]. Standar
kualitas air kolam ikan air tawar dapat dilihat pada Tabel 2.3.
Tabel 2.3. Standar Kualitas Air Kolam [5][7]
Unsur Nilai
Kejernihan 25 – 100 JTU
Konduktivitas 0 - 5000 µS
Suhu - C
Keasaman 6.7 – 8.6
Oksigen
Terlarut
2.3. Sensor
PH-BTA Vernier
Alat ukur kadar keasaman (pH meter) adalah sebuah alat elektronik yang
digunakan untuk mengukur pH (keasaman atau alkalinitas) dari suatu cairan (meskipun
probe khusus terkadang digunakan untuk mengukur pH zat semi padat). Alat ukur pH biasa
terdiri dari pengukuran khusus probe (elektroda gelas) yang terhubung ke meteran
elektronik yang mengukur dan menampilkan pH terbaca.
Prinsip dasar pengukuran pH dengan menggunakan pH meter adalah potensial
elektrokimia yang terjadi antara larutan yang terdapat di dalam elektroda gelas yang telah
diketahui dengan larutan yang terdapat di luar elektroda gelas yang tidak diketahui. Hal ini
dikarenakan lapisan tipis dari gelembung kaca akan berinteraksi dengan ion hidrogen yang
ukurannya relatif kecil dan aktif.
Elektroda gelas tersebut akan mengukur potensial elektrokimia dari ion hidrogen
atau diistilahkan dengan potential of hidrogen. Untuk melengkapi sirkuit elektrik dibutuhkan suatu elektroda pembanding. Sebagai catatan, alat tersebut tidak mengukur arus
tetapi hanya mengukur tegangan. Skema elektroda pH meter akan mengukur potensial
listrik antara Merkuri Klorid (HgCl) pada elektroda pembanding dan potassium chloride
(KCl) yang merupakan larutan di dalam gelas elektroda serta petensial antara larutan dan
elektroda perak. Tetapi potensial antara sampel yang tidak diketahui dengan elektroda
gelas dapat berubah tergantung sampelnya.
Oleh karena itu, perlu dilakukan kalibrasi dengan menggunakan larutan yang
ekuivalen yang lainnya untuk menetapkan nilai pH. Elektroda pembanding calomel terdiri dari tabung gelas yang berisi potassium kloride (KCl) yang merupakan elektrolit yang
berinteraksi dengan HgCl diujung larutan KCl. Tabung gelas ini mudah pecah sehingga
untuk menghubungkannya digunakan keramik berpori atau bahan sejenisnya. Elektroda
semacam ini tidak mudah terkontaminasi oleh logam dan unsur natrium.
Elektroda gelas terdiri dari tabung kaca yang kokoh dan tersambung dengan
gelembung kaca yang tipis. Di dalamnnya terdapat larutan KCl yang buffer pH 7.
Elektroda perak yang ujungnya merupakan perak kloride (AgCl) dihubungkan ke dalam
larutan tersebut. Untuk meminimalisir pengaruh elektrik yang tidak diinginkan, alat
tersebut dilindungi oleh suatu lapisan kertas pelindung yang biasanya terdapat di bagian
Pada kebanyakan pH meter modern sudah dilengkapi dengan thermistor temperature, yakni suatu alat untuk mengkoreksi pengaruh temperatur. Antara elektroda pembanding dengan elektroda gelas sudah disusun dalam satu kesatuan.
Alat ukur pH harus dikalibrasi sebelum dan setelah setiap pengukuran. Untuk
penggunaan normal, kalibrasi harus dilakukan pada awal pemakaian dengan menggunakan
standar pH atau sering disebut buffer pH. Standard pH adalah larutan yang nilai pH-nya telah diketahui pada setiap perubahan suhu. Standar pH merupakan larutan buffer pH (penyangga pH) dimana nilainya relatif konstan dan tidak mudah berubah.[9]
Sensor pH (pH- BTA Vernier ) menghasilkan tegangan keluaran sebesar 1.75 Volt pada saat pH 7. Tegangan keluaran dari sensor akan naik sebesar 0.25 Volt untuk setiap
penurunan nilai pH sebesar 1. Tegangan keluaran sensor akan mengalami penurunan
sebesar 0.25 Volt untuk setiap kenaikan nilai pH sebesar 1. Sensor ini dapat digunakan
untuk mengukur pH dengan range dari 0 sampai 14 [10]. Sensor pH- BTA Vernier
ditunjukan seperti pada Gambar 2.1 dibawah ini.
Gambar 2.1. Sensor pH- BTA Vernier [11]
Sensor pH- BTA Vernier memiliki konfigurasi pin tipe BTA (British Telecom Analog) –Right Hand seperti pada Gambar 2.2.
Konfigurasi Pin Sensor pH- BTA Vernier [12] dapat dijelaskan sebagai berikut: a. Pin 1 = Sensor output (+/-10V)
b. Pin 2 = GND
c. Pin 3 = Vres (resistance reference)
d. Pin 4 = AutoIDENT (not supported on all sensors) e. Pin 5 = Power (+5VDC)
f. Pin 6 = Sensor output (0-5V)
2.4. Mikrokontroler ATMega32L
Mikrokontroler adalah sebuah sistem microprosesor dimana didalamnya sudah terdapat CPU, ROM, RAM, I/O, Clock, dan peralatan internal lainnya yang sudah saling terhubung dan terorganisasi ( teralamati ) dengan baik oelh pabrik pembuatnya dan
dikemas dalam satu chip yang siap pakai. Sehingga dapat langsung digunakan dengan memprogram isi ROM sesuai aturan penggunaan oleh pabrik yang membuatnya.
Mikrokontroler AVR dapat dikelompokkan menjadi 4 kelas yaitu kelas ATtiny, kelas
AT90xx, keluarga ATmega, dan kelas AT86RFxx. Pada dasarnya yang membedakan
masing-masing kelas adalah memori, peripheral, speed, operasi tegangan, dan fungsinya. Sedangkan dari segi arsitektur dan instruksi yang digunakan bisa dikatakan hampir sama
[13]. Konfigurasi pin dari ATMega32 [14] ditunjukkan pada Gambar 2.3.
Konfigurasi pin ATMega 32L dapat dijelaskan sebagai berikut:
a. Pin 1 sampai 8 (Port B) merupakan port parallel 8 bit dua arah (bidirectional), yang dapat digunakan untuk general purpose dan special feature.
b. Pin 9 (reset) jika terdapat minimum pulse pada saat active low.
c. Pin 10 (VCC) dihubungkan ke Vcc (2,7 – 5,5 Volt).
d. Pin 11 dan 31 (GND) dihubungkan ke Vss atau ground.
e. Pin 12 (XTAL 2) adalah pin masukkan ke rangkaian osilator internal. Sebuah osilator kristal atau sumber osilator luar dapat digunakan.
f. Pin 13 (XTAL 1) adalah pin keluaran ke rangkaian osilator internal. Pin ini dipakai bila menggunakan osilator kristal.
g. Pin 14 sampai 21 (Port D) adalah 8-bit dua arah (bi-directional I/O) port dengan
Gambar 2.3. Konfigurasi Pin ATMega32[15]
h. Pin 22 sampai 29 (Port C) adalah 8-bit dua arah (bi-directional I/O) port dengan
internal pull-up resistors digunakan untuk general purpose dan special feature. i. Pin 30 adalah Avcc pin penyuplai daya untuk port A dan A/D converter dan
dihubungkan ke Vcc. Jika ADC digunakan maka pin ini dihubungkan ke Vcc.
j. Pin 32 adalah A REF pin yang berfungsi sebagai referensi untuk pin analog jika
A/D Converter digunakan.
k. Pin 33 sampai 40 (Port A) adalah 8-bit dua arah (bi-directional I/O) port dengan
internal pull-up resistors digunakan untuk general purpose.
2.5. ADC (
Analog Digital Converter
) [14]
ADC mengkonversi tegangan input analogmenjadi bilangan digital selebar 10 – bit. GND (0 Volt) adalah nilai minimum yang mewakili ADC dan nilai maximum ADC diwakili oleh tegangan pin Aref minus 1 LSB. Hasil konversi ADC disimpan dalam
Gambar 2.4. Blok ADC [16]
Fitur yang dimiliki ADC adalah sebagai berikut :
1. Resolusi mencapai 10-bit. 2. 0.5 LSB Integral Non-linearity. 3. Akurasi mencapai ± 2 LSB.
4. Waktu konversi mencapai 13 – 260 µs.
5. 8 saluran ADC yang dapat digunakan secara bergantian.
6. Optional Left Adjustment untuk pembacaan hasil ADC. 7. 0 – VCC Range input ADC.
8. Disediakan 2.65V tegangan referensi internal ADC.
9. Metode konversi kontinyu (free running) atau mode konversi tunggal (single conversion).
Sinyal input dari pin ADC akan dipilih oleh multiplexer ( register ADMUX) untuk diproses oleh ADC, karena converter ADC dalam chip hanya satu buah sedangkan saluran
input-nya ada delapan maka dibutuhkan multiplexer untuk memilih input pin ADC secara
bergantian. ADC mempunyai rangkaian untuk mengambil sampel dan hold (menahan)
tegangan input ADC sehingga dalam keadaan konstan selama proses konversi. ADC
mempunyai catu daya yang terpisah yaitu pin AVCC-AGDN. AVCC tidak boleh berbeda
±0.3V dari VCC. Sinyal input ADC tidak boleh boleh melebihi tegangan referensi. Nilai digital sinyal input ADC ditunjukan dengan perhitungan yang ditampilkan pada persamaan
2.1. dan 2.2.
Kode digital resolusi 8- bit (256) =
(2.1)
Kode digital resolusi 10- bit (1024) = (2.2)
Untuk mencari nilai :
(2.3)
Operasi ADC membutuhkan tegangan referensi Vref dan clockFADC (register
ADCSRA). Tegangan referensi eksternal pada pin Aref tidak boleh melebihi AVCC.
Tegangan referensi eksternal dapat di – decouple pada pin Aref dengan kapasitor untuk mengurangi derau. Atau dapat menggunakan tegangan referensi internal sebesar 2.56V
(pin Aref diberi kapasitor secara eksternal untuk menstabilkan tegangan refrensi internal).
ADC mengkonversi tegangan input analogmenjadi bilangan digital selebar 10 – bit. GND (0 Volt) adalah nilai minimum yang mewakili ADC dan nilai maximum ADC diwakili oleh tegangan pin Aref minus 1 LSB. Hasil konversi ADC disimpan dalam register pasangan ADCH:ADCL. Mode operasi ADC dibagi menjadi dua kategori yaitu mode konversi
tunggal dan mode free running.
Mode konversi tunggal dilakukan untuk sekali pembacaan sampel tegangan input,
jika ingin membaca lagi maka harus disampel lagi sehingga mengkonversi tegangan input
untuk saat – saat yang dibutuhkan saja. Mode konversi tunggal dipilih dengan menge–
clearbit-ADFR dalam register ADCSRA. Mode konversi tunggal memulai konversi ketika
setelah (complete) itu maka otomatis CPU bit-ADSC akan clear. Ketika konversi sedang berlangsung dan pengguna mengubah saluran (channel) input ADC maka hal tersebut tidak akan diubah oleh CPU hingga konversi ADC saluran tersebut selesai.
Mode free running konversi dilakukan terus menerus secara kontinyu, ADC membaca sampel tegangan input lalu dikonversi hasilnya masukkan ke
registerADCH:ADCL terus menerus. Ketika membaca ADC selagi ADC mengkonversi tegangan sedang berlangsung, maka yang terbaca adalah hasil ADC yang terakhir yang
dibaca oleh ADC. Mode free runningdipilih dengan meng – set bit-ADFR dalam register
ADCSRA. Konversi pertama dalam mode ini dimulai dengan meng – set bit-ADSC. Dalam mode ini ADC bekerja secara independen (tidak bergantung) dari flag interupsi ADC, dimana ADIF set atau clear dianggap sama saja.
2.6.
LCD (
Liquid Crystal Display
)
LCD ( Liquid Crystal Display ) merupakan suatu display yang digunakan untuk menampilkan suatu karakter yang diberikan oleh sistem. LCD digunakan untuk
mempermudah pembacaan hasil keluaran dari sistem, sehinnga tampilan yang dibuat dapat
menarik. LCD yang digunakan adalah LCD 2x16, dengan tampilan display 2 baris 16 kolom, yang mempunyai 16 pin konektor.
Gambar 2.5.LCD 2x16 [17]
Tabel 2.4.Fungsi Pin LCD 2x16 [18]
PIN SIMBOL FUNGSI
1 Vss GND
2 Vdd +3V or +5V
Tabel 2.4.(Lanjutan) Fungsi Pin LCD 2x16 [18]
PIN SIMBOL FUNGSI
4 RS H/L Register Select Signal
5 R/W H/L Read/Write Signal
6 E H → L Enable Signal
7 DB0 H/L Data Bus Line
8 DB1 H/L Data Bus Line
9 DB2 H/L Data Bus Line
10 DB3 H/L Data Bus Line
11 DB4 H/L Data Bus Line
12 DB5 H/L Data Bus Line
13 DB6 H/L Data Bus Line
14 DB7 H/L Data Bus Line
15 A/Vee + 4.2V for LED/Negative Voltage Output
16 K Power Supply for B/L (0V)
2.7. Komunikasi Serial RS-485
Komunikasi serial adalah sebuah komunikasi pengiriman data yang dilakukan
secara bergantian atau satu persatu.. Komunikasi data serial sangat berbeda dengan format
pemindahan data pararel. Disini pengiriman bit tidak dilakukan sekaligus seperti pada
saluran pararel, tetapi setiap bit dikirimkan satu per satu melalui saluran tunggal. Dalam
pengiriman data secara serial harus ada sinkronisasi atau penyesuaian antara pengirim dan
penerima agar data yang dikirimkan dapat diterima dengan tepat dan benar oleh penerima.
Sistem komunikasi serial ini didukung oleh IC RS-485 untuk komunikasi serialnya.
Komunikasi serial tersebut bersifat dua arah dan dapat mengirimkan data sejauh 1,2 km
atau (4000ft), serta memiliki jalur yang sedikit sehingga lebih menghemat pin dan kabel
jika dibandingkan dengan komunikasi paralel.
IC RS485 adalah IC yang digunakan untuk teknik komunikasi data serial. Sistem
komunikasi dengan menggunakan RS485 mulai dikembangkan pada tahun 1983 dengan
teknik ini, komunikasi data dapat dilakukan pada jarak yang cukup jauh yaitu 1,2 km.
Selain dapat digunakan untuk jarak yang jauh teknik ini juga dapat digunakan untuk
menghubungkan 32 unit beban sekaligus hanya dengan menggunakan dua buah kabel saja
tanpa memerlukan referensi ground yang sama antara unit yang satu dengan unit lainnya. RS-485 merupakan standar komunikasi serial yang bersifat multidrop/multi-point. Dalam sistem multi-point ini transfer data dapat dilakukan dari satu transmitter ke beberapa
receiver sekaligus, atau dengan kata lain membentuk suatu jaringan komputer. Dalam RS-485 terdapat sebuah transmitter (disebut juga driver) dan sebuah receiver. [19]. Konfigurasi pin IC RS-485 ditunjukan pada Gambar 2.6.
Gambar 2.6. Konfigurasi Pin IC RS485 [20]
Tabel 2.5. Tabel Konfigrasi IC RS485 [20]
Pin Simbol Nama & Fungsi
1 RO Receiver output
2 RE Receiver output enable
3 DE Driver output enable
4 DI Driver input
5 GND Ground
6 A Non-inverting receiver input & Non-inverting driver output
7 B Inverting receiver input and inverting driver output
2.7.1.
Half-Duplex
RS-485
Jaringan Half-duplex RS-485 memiliki beberapa transmitter dan receiver pada jalur sinyal yang sama. Proses pengiriman data pada RS-485 akan terjadi apabila salah satu dari
transmitter / receiver di aktifkan. Konfigurasi ini juga dikenal sebagai jaringan dua kawat. RS-485 termasuk dalam konfigurasi multipoint dan memungkinkan untuk transmisi data
dalam dua arah dengan cara bergantian [21]. Konfigurasi Jaringan Half-duplex RS-485 ditunjukkan pada Gambar 2.7.
Gambar 2.7. Konfigurasi Jaringan Half-Duplex RS-485 [20]
2.8
. Voltage Regulators
IC secara luas dapat digunakan sebagai regulator tegangan. Unit regulator IC
mengandung rangkaian sumber referensi, penguat komparator, perangkat pengendali dan
perlindungan beban lebih. Keluaran unit regulator IC bisa berupa tegangan tetap positif,
tegangan tetap negatif atau tegangan variabel [22].
Tegangan tetap positif dapat menggunakn IC dengan seri 78xx. IC seri ini
menghasilkan keluaran dari +5 sampai +24. Gambar 2.8. menunjukkan kaki dari IC 78xx,
Gambar 2.8. Kaki IC 78xx [23]
Tabel 2.6. Jenis-jenis IC Regulator 78xx [22]
IC part Tegangan keluaran
(V)
Tegangan masukan minimum (V)
7805 +5 7,3
7806 +6 8,3
7808 +8 10,5
7810 +10 12,5
7812 +12 14,6
7815 +15 17,7
7818 +18 21,0
7824 +24 27,1
Gambar 2.9. memperlihatkan IC 7812 yang terhubung untuk menghasilkan
tegangan regulasi +12 volt. Tegangan masukan Vi difilter oleh kapasitor C1 dan
dihubungkan ke terminal IN IC. Terminal OUT IC menghasilkan tegangan regulasi +12
volt yang difilter oleh kapasitor C2. Terminal IC yang ketiga dihubungkan ke ground
(GND).
Perhitungan nilai kapasitor C1 menggunakan persamaan [22] :
(2.3)
dengan
C = kapasitor dalam Farad
= arus beban dalam Ampere f = frekuensi dalam Hz
= tegangan ripple rms dalam volt
Di mana nilai dapat dicari dengan menggunakan persamaan [22]:
(2.4)
dengan ( − ) adalah tegangan ripple peak to peak yang merupakan selisih antara tegangan masukan regulator dengan tegangan masukan minimum IC regulator yang
digunakan atau dapat dirumuskan sebagai berikut [22] :
(2.5)
dengan:
= tegangan masukkan regulator dalam volt
= tegangan masukkan minimum IC regulator
Apabila tegangan masukan regulator berasal dari tegangan AC yang kemudian
disearahkan menggunakan dioda, nilai dicari menggunakan persamaan [20]:
(2.6)
dengan merupakan nilai tegangan AC yang sudah diturunkan menggunakan
2.9
.
Motor DC [24]
Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai
sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminal tersebut,
motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka
arah putaran motor akan terbalik pula. Polaritas dari tegangan yang diberikan pada dua
terminal menentukan arah putaran motor sedangkan besar dari beda tegangan pada kedua
terminal menentukan kecepatan motor. Contoh salah satu jenis motor ditunjukkan pada
Gambar 2.10.
Gambar 2.10. Motor DC
Motor DC memiliki 2 bagian dasar :
1. Bagian yang tetap/stasioner yang disebut stator.
Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil
(elektro magnet) ataupun magnet permanen.
2. Bagian yang berputar disebut rotor.
Rotor ini berupa sebuah koil dimana arus listrik mengalir.
Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada
penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh
megnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub
utara ke kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada
penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya F, timbul
tergantung pada arah arus I, dan arah medan magnet B. Konstruksi motor dc ditunjukkan
Gambar 2.11. Konstruksi Motor DC
2.10
.
IC L298 [25]
IC H-Bridge driver motor DC L298 memiliki dua buah rangkaian H-Bridge di dalamnya, sehingga dapat digunakan untuk men-drive dua buah motor DC . IC L298 masing-masing dapat mengantarkan arus hingga 2A. Namun, dalam penggunaannya, IC
ini dapat digunakan secara paralel, sehingga kemampuan menghantarkan arusnya
menjadi 4A.
Prinsip kerja IC L298, IC ini memiliki empat channel masukan yang didesain untuk dapat menerima masukan level logika TTL. Masing-masing channel masukan ini memiliki channel keluaran yang bersesuaian. Gambar 2.12 memperlihatkan penampang IC L298. Dengan memberi tegangan 5 volt pada pin enable A dan enable B, masing-masing channel output akan menghasilkan logika high (1) atau low (0) sesuai dengan
input pada channel masukan. Untuk lebih jelasnya prinsip kerja IC L298 dapat dilihat pada Tabel 2.7.
Tabel 2.7. Tabel Logika Prinsip Kerja ICL298
Enable A,B Input 1,3 Output 1,3 Input 2,4 Output 2,4
1 0 0 0 0
1 1 1 1
0 0 X 0 x
1 X 1 x
Keterangan:
x : kondisi don’t care (tidak dihiraukan)
2.11
.
Keypad 4x4
Keypad merupakan switch yang telah disusun sedemikian sehingga membentuk baris dan kolom, serta setiap switch tersebut telah diberi nama, biasanya berupa angka dan huruf yang memudahkan pengguna untuk meng-input data. Biasanya keypad difungsikan sebagai input dalam aplikasi seperti pengaman digital, datalogger, absensi, pengendali kecepatan motor, robotic, damn sebagainya. Keypad 4x4 biasanya memiliki 8 buah pin. Cara kerja keypad hamper sama seperti switch dimana jika salah satu tombol ditekan akan memyebabkan pin – pin tertentu menjadi terhubung. [26] . Konfigurasi keypad 4x4 ditunjukan pada Gambar 2.13.
2.12
.
Limit
Switch
[28]
Limit switch merupakan jenis saklar yang dilengkapi dengan katup yang berfungsi menggantikan tombol. Prinsip kerja limit switch sama seperti saklar Push ON yaitu hanya akan menghubung pada saat katupnya ditekan pada batas penekanan tertentu yang telah
ditentukan dan akan memutus saat saat katup tidak ditekan. Limit switch termasuk dalam
kategori sensor mekanis yaitu sensor yang akan memberikan perubahan elektrik saat
terjadi perubahan mekanik pada sensor tersebut. Pada Gambar 2.14 merupakan rangkaian
limit switch yang menggunakan resistor. Nilai resistor yang digunakan didapat dari
persamaaan :
(2.7)
dengan :
R = nilai hambatan
Vcc = tegangan masukkan
Voperate =tegangan kerja mikrokontroler
Iactvie = arus kerja mikrokontroler
Gambar 2.14. Rangkain Limit Switch
Prinsip kerja limit switch diaktifkan dengan penekanan pada tombolnya pada
batas/daerah yang telah ditentukan sebelumnya sehingga terjadi pemutusan atau
penghubungan rangkaian dari rangkaian tersebut. Limit switch memiliki 2 kontak yaitu NO (Normally Open) dan kontak NC (Normally Close) dimana salah satu kontak akan aktif
R
VCC
jika tombolnya tertekan. Simbol dan gambar dari limit switch ditunjukkan seperti pada Gambar 2.15 dan Gambar 2.16.
Gambar 2.15. Simbol Limit Switch
26
BAB III
RANCANGAN PENELITIAN
3.1. Arsitektur Umum
Perancangan alat ukur kadar keasaman (pH) dibagi menjadi dua mode perancangan,
yaitu perancangan hardware dan perancangan software. Perancangan hardware yang akan dirancang oleh penulis meliputi perancangan rangkaian sensor pH, LCD character, rangkaian minimum system mikrokontroler, rangkaian regulator, rangkaian driver motor, perancangan mekanik sensor, dan perancangan mekanik autosampling. Perancangan software berhubungan dengan program yang digunakan untuk menjalankan sistem
pengukuran kadar keasaman air kolam ikan air tawar dan program kendali motor
pembersih sensor. Blok diagram subsistem pengukuran kadar keasaman air kolam ikan air
tawar ditunjukkan pada Gambar 3.1, yang berada dalam garis putus-putus.
Gambar 3.1. Blok Diagram Perancangan Subsistem Pengukuran Kadar Keasaman
Pengukuran pH air kolam ikan air tawar bekerja apabila sistem monitoring kualitas air akan melakukan pengukuran sampel air. Proses sampling dilakukan ketika sistem kontrol mengendalikan air masuk ke dalam tempat autosampling. Sensor pH akan
Air sampel
( air kolam)
Sensor PH-BTA Vernier
Mikrokontroler
LCD Penampil
RS 485
Akusisi Data Sensor Limit
Switch
melakukan pengukuran air sampel yang sudah ditempatkan di autosampling. Hasil pengukuran sensor pH berupa tegangan yang diolah oleh mikrokontroler melalui channel
ADC. Tegangan ADC dari mikrokontroler dikonversi menjadi nilai kadar keasaman.
Keluaran dari mikrokontroler yang sudah berupa nilai kadar keasaman akan ditampilkan di
LCD character dan akan dikirimkan ke subsistem akusisi data dengan komunikasi serial RS 485. Data dikirimkan setelah ada permintaan pengiriman dari subsistem akusisi data
yang bertindak sebagai master dalam sistem monitoring kualitas air. Jika master (subsistem akusisi data) tidak meminta data pengukuran, maka data hanya akan disimpan dan
ditampilkan di LCD character saja.
Proses kendali pembersihan sensor dilakukan ketika sensor telah melakukan proses
pengukuran. Limit switch digunakan sebagai input mikrokontroler yang akan digunakan
untuk batas berhentinya kotak tempat sensor. Motor berfungsi sebagai penggerak kotak
tempat sensor dan dikendali oleh mikrokontroler.
3.2. Perancangan
Hardware
3.2.1. Perancangan Mekanik Sensor
Perancangan mekanik pada sensor kadar keasaman air terdiri dari perancangan
tempat mekanik sensor dan perancangan mekanik pembersih sensor. Perancangan tempat
mekanik sensor sendiri terdiri dari perancangan kotak tempat mikrokontroler, keypad, dan LCD character sebagai penampil nilai pH. Kotak mekanik untuk tempat mikrokontroler dan LCD character terbuat dari acrylic dengan ukuran 11x9x7cm seperti Gambar 3.2
Perancangan mekanik perbersih sensor terdiri dari motor dc, katrol, dan kotak
sebagai tempat sensor. Prinsip kerja dari mekanik pembersih sensor ini adalah motor akan
menggerakan katrol yang akan menarik tali yang sudah dikaitkan dengan kotak tempat
sensor kadar keasamanan, kotak akan ditarik keatas setiap sensor selesai melakukan
pengukuran sampel. Perancangan mekanik pembersih sensor terlihat seperti Gambar 3.3.,
Gambar 3.2. Kotak Mekanik Sensor Tampak Samping
Gambar 3.4. Kotak Mekanik Pembersih Sensor Tampak Samping
3.2.2. Perancangan Mekanik
Autosampling
Autosampling merupakan tempat yang digunakan untuk melakukan pengukuran sampel air pada sistem monitoring. Perancangan autosampling yang akan dirancang ukuran 22x20x15cm. Tempat autosampling dibagi menjadi 3 bagian dimana bagian tengah digunakan sebagai tempat aliran utama air sampel dari sistem kontrol monitoring kualitas air, sedangkan dua bagian samping digunakan sebagai pengukuran sampling air.
Perancangan mekanik tempat autosampling dapat dilihat pada Gambar 3.5.,dan Gambar 3.6.
Gambar 3.6. Tempat Autosampling Tampak Dalam
3.2.3. Perancangan Sensor pH meter
Sensor pH meter yang digunakan dalam perancangan adalah sensor PH vernier –
BTA. Sensor ini akan menghasilkan tegangan output sebesar 1.75V pada saat pH terukur 7.
Tegangan pada sensor akan mengalami kenaikan 0.25 volt pada saat pH terukur kurang
dari 7 sehingga pada saat pH=0 tengangan yang akan dihasilkan sebesar 3.5V. Sensor akan
mengalami penurunan sebesar 0.25V ketika pH yang terukur lebih dari 7. Perancangan
sensor pH tidak menggunakan pengkondisi sinyal, dikarenakan output dari sensor sudah
cukup tinggi untuk masuk ke dalam mikrokontroler yaitu 3.75Volt.
Gambar 3.7. Rangkaian Sensor pH meter
5V
sensor pH
output sensor
Sensor PH vernier-BTA memiliki 6 konfigurasi pin, pada perancangan pin yang
digunakan hanya 3 pin yaitu pin 2 terhubung ground, pin 5 terhubung power (0-5V), dan
pin 2 sebagai output sensor yang akan terhubung dengan mikrokontroler ATMega32.
Rangkaian sensor pH meter ditunjukan pada Gambar 3.7.
3.2.4. Perancangan LCD
Character
LCD character digunakan untuk menampilkan nilai hasil pengukuran kadar pH yang telah disampling. LCD character 16x2 terdiri dari 16 karakter dan 2 line. LCD dengan tipe ini dapat mempunyai dua jenis tipe komunikasi, yaitu komunikasi data secara
4 bit atau 8 bit. Jalur data 4 bit akan ada 7 jalur data, dimana 3 untuk jalur kontrol dan 4
untuk jalur data. Jalur data 8 bit akan ada 11 jalur data, dimana 3 untuk jalur kontrol dan 8
untuk jalur data. Tiga jalur kontrol ke LCD ini adalah EN (Enable), RS (Register Select), dan R/W (Read/Write). Rangkaian LCD yang akan dirancang seperti pada Gambar 3.8.
Gambar 3.8. Rangkaian LCD character 16x2
Pada perancangan penulis menggunakan rangkaian LCD character mode 4 bit ditunjukkan pada Gambar 3.8. Tegangan yang diperlukan untuk mengaktifkan rangkaian
ini adalah sebesar +5 volt. Pengaturan kontras LCD character menggunakan resistor
3.2.5. Perancangan Driver Motor
Driver motor merupakan rangkaian yang berfungsi untuk meningkatkan arus keluaran mikrokontroler ke motor dc. Motor dc yang akan dikendalikan oleh
mikrokontroler memerlukan arus sebesar 1A sedangkan keluaran dari mikrokontroler
hanya memiliki arus yang kecil, sehingga diperlukan driver motor untuk meningkatkan
arus. Rangkaian driver motor yang dirancang seperti pada Gambar 3.9.
Pada perancangan ini digunakan IC L298 sebagai IC driver. IC ini mempu
menguatkan arus sampai 4A. Masukan dari IC L298 merupakan keluaran dari
mikrokontroler dengan InA1 dan InA2 merupkan masukan untuk motor penggerak katrol
penarik kotak sensor. Untuk masukan ENA dan ENB merupakan masukan untuk mengatur
kecepatan motor. Kecepatan motor akan ditentukan dengan jumlah pulsa yang diberikan
atau PWM. Dioda yang digunakan ialah dioda dengan tipe 1N4001 sesuai dengan
datasheet L298.
Gambar 3.9. Rangkaian Driver Motor
3.2.6. Perancangan
Keypad
4x4
digunakan pada perancangan ini adalah keypad 4x4. Keypad 4x4 terdiri dari 4 baris dan 4 kolom yang digunakan. Rancangan Keypad yang akan digunakan terlihat seperti pada Gambar 3.10. Fungsi dari tombol pada keypad yang akan digunakan dalam perancangan ditunjukan pada Tabel 3.1.
Tabel 3.1. Fungsi Tombol Keypad 4x4
Tombol Fungsi
Tombol 0 Angka 0
Tombol 1 Angka 1
Tombol 2 Angka 2
Tombol 3 Angka 3
Tombol 4 Angka 4
Tombol 5 Angka 5
Tombol 6 Angka 6
Tombol 7 Angka 7
Tombol 8 Angka 8
Tombol 9 Angka 9
Tombol A Kembali ke tampilan awal
Tombol B Kembali ke sebelumnya
Tombol D Hapus
Tombol * koma
Gambar 3.10. Rancangan Keypad 4x4
3.2.7. Perancangan
Limit Switch
Limit switch pada perancangan ini digunakan sebagai batas gerakan naik –
turunnya motor pembersih sensor. Berdasarkan persamaan 2.7. nilai resistor yang
digunakan dalam perancangan dapat dihitung sebagai berikut :
Vcc = 5 Volt
Voperate = 2.75 Volt
Iactive = 1.1 mA
R =
=
R =
2,045 KΩ
Nilai resistor ( R ) yang didapatkan adalah sebesar 2,045 KΩ tidak dijual dipasaran,
maka digunaka resistor 2,200 KΩ sebagai gantinya. Gambar rangkain limit switch yang
akan dirancang ditunjukkan Gambar 3.11.
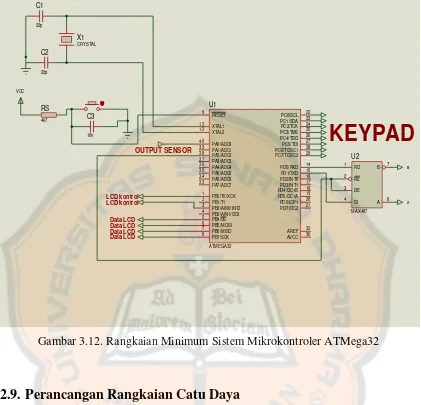
3.2.8. Perancangan Minimum Sistem Mikrokontreoler ATMega32
Mikrokontroler ATMega32 memiliki empat konfigurasi pin dengan masing –
masing delapan pin. Perancangan mikrokontroler ATMega32 berdasarkan arsitektur
Gambar 2.3. Perancangan penggunaan port input dan output pada mikrokontroler disesuaikan dengan kebutuhan. Port yang akan digunakan pada perancangan antara lain
port A, port B, dan port D, konfigurasi port yang akan digunakan ditunjukkan pada Tabel 3.1. Rangkaian minimum sistem yang akan dirancang ditunjukkan pada Gambar 3.12.
Tabel 3.2 Konfigurasi Port Mikrokontroler ATmega32
Port Fungsi
Port A.0 Output dari sensor pH Vernier-BTA
Port B Output LCD
Port A.2 Komunikasi serial kesistem monitoring kualitas air (kontrol)
Port A.3 s/d Port A.4 Limit switch Atas dan limit I bawah
Port D.0 Komunikasi serial kesistem monitoring kualitas air (receiver)
Port D.1 Komunikasi serial kesistem monitoring kualitas air (transmitter)
Port C.0 s/d Port C.7 Keypad
Gambar 3.12. Rangkaian Minimum Sistem Mikrokontroler ATMega32
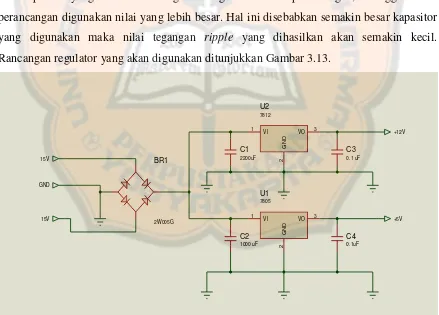
3.2.9. Perancangan Rangkaian Catu Daya
Pada perancangan ini menggunakan catu daya yang berfungsi menyuplai seluruh
tegangan yang dibutuhkan semua hardware perancangan sistem. Catu daya yang akan
dirancang menghasilkan tegangan sebesar +5 Volt dan +12 Volt. Rangkaian catu daya ini
memperoleh sumber tegangan dari jala – jala listrik PLN, dimana jala – jala listrik PLN
menghasilkan tegangan 220 Volt AC. Tegangan 220 Volt AC ini akan diturunkan lebih
dahulu melalui trafo 1 A, dimana penurunan tegangannya menjadi sekitar 15 Volt.
Perancangan catu daya juga menggunakan dioda bridge untuk menyearahkan tegangan AC sehingga akan menghasilkan gelombang penuh.
Pengaturan tegangan dengan IC LM7812 dan LM7805 digunakan untuk
menghasilkan tegangan +12 Volt dan +5Volt. Rangkaian catu daya tegangan +12 Volt dan
+5 Volt dapat dilihat pada Gambar 3.13.
Nilai kapasitor C1 yang digunakan dalam perancangan didapatkan dari persamaan
2.3, dimana nilai sebesar 1A berdasarkan total arus dalam perancangan dan frekuensi
sebesar 50 Hz. Nilai dihitung dengan menggunakan persamaan 2.4 dan nilai
dihitung dengan menggunakan persamaan 2.5.Nilai dihitung dengan
menggunakan persamaan 2.6., sehingga nilai C1 dapat dihitung seperti berikut ini. a. LM7812
Nilai kapasitor C1 yang didapatkan sebesar 1919 µF tidak dijual di pasaran, maka
digunakan kapasitor 2200 µF.
b. LM7805
diganti menjadi 1000μF. Nilai perhitungan kapasitor C1 dan C2 merupakan nilai minimum
dari kapasitor yang dibutuhkan rangkaian regulator dalam perancangan, sehingga dalam
perancangan digunakan nilai yang lebih besar. Hal ini disebabkan semakin besar kapasitor
yang digunakan maka nilai tegangan ripple yang dihasilkan akan semakin kecil. Rancangan regulator yang akan digunakan ditunjukkan Gambar 3.13.
![Tabel 2.1. Hubungan antara pH Air dan Kehidupan Hewan (ikan) Budidaya [6]](https://thumb-ap.123doks.com/thumbv2/123dok/1794621.2097662/23.595.96.532.293.582/tabel-hubungan-ph-air-kehidupan-hewan-ikan-budidaya.webp)