TUGAS AKHIR
SISTEM PENGUKURAN KONDUKTIVITAS AIR KOLAM IKAN
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
TIPER KORNELES MUWARBERTO UNIPLAITA
NIM : 105114046
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
i
TUGAS AKHIR
SISTEM PENGUKURAN KONDUKTIVITAS AIR KOLAM IKAN
Diajukan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
TIPER KORNELES MUWARBERTO UNIPLAITA
NIM : 105114046
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
FISH POND WATER CONDUCTIVITY MEASUREMENT SYSTEM
Presented as Partial Fulfillment of the Requirements
To Obtain the Sarjana Teknik Degree
in Electrical Engineering Study Program
TIPER KORNELES MUWARBERTO UNIPLAITA
NIM : 105114046
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
v
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akhir ini tidak memuat karya
atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar
pustaka sebagaimana layaknya karya ilmiah.
Yogyakarta, 25 Agustus2014
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO:
Aku Berpikir Maka Aku Ada
Oleh
Rene Descartes
Skripsi Ini Saya Persembahkan Untuk.
…….
TUHAN YESUS yang selalu menyertai saya
vii
LEMBAR PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK
KEPENTINGAN AKADEMIS
Yang bertan datangan dibawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : Tiper Korneles Muwarberto Uniplaita
Nomor Mahasiswa : 105114046
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul :
SISTEM PENGUKURAN KONDUKTIVITAS AIR KOLAM IKAN
Beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada
Perpustakaan Universitas Sanata Dharma untuk menyimpan, mengalihkan dalam bentuk
media lain, mengelolahnya dalam bentuk pangkalan data, mendistribusikan secara terbatas,
dan mempublikasikannya di internet atau media lain untuk kepentingan akademis tanpa
perlu meminta ijin dari saya maupun memberikan royalti kepada saya selama tetap
mencantumkan nama saya sebagai penulis.
Demikian pernyatan ini saya buat dengan sebenarnya.
Yogyakarta, 25 Agustus2014
viii
INTISARI
Masyarakat di tepian sungai membudidayakan ikan air tawar sebagai mata pencaharian. Sungai dengan kualitas air yang baik dapat meningkatkan kelangsungan hidup ikan. Namun, jika air sungai terkontaminasi dengan unsur-unsur kimiawi yang merusak, maka tingkat kelangsungan hidup ikan menurun. Sistem pengukuran konduktivitas air kolam ikan berfungsi mengukur nilai konduktivitas air pada kolam ikan. Informasi nilai konduktivitas digunakan sebagai data monitoring pada sistem akuisisi data dan indikator kontrol pada sistem kontrol.
Sistem pengukuran konduktivitas air kolam ikan menggunakan tegangan DC sebagai sumber eksitasi pada dua pole elektroda. Sistem ini menggunakan empat sensor konduktivitas dengan nilai konstanta sel 1cm-1, 2cm-1, 5cm-1 dan 10cm-1. Sistem pengukuran konduktivitas air kolam ikan hanya melakukan pengukuran setelah menerima instruksi dari sistem akuisisi data. Sistem akuisisi data dan sistem pengukuran konduktivitas air kolam ikan berkomunikasi secara serial menggunakan rangkaian RS-485.
Sensor konduktivitas dengan konstanta sel 1cm-1, 2cm-1 dan 5cm-1 mampu melakukan pengukuran konduktivitas dalam jangkauan pengukuran 0µS/cm sampai 5000µS/cm. Setiap sensor memiliki daerah jangkauan pengukuran yang berbeda-beda. Sensor konduktivitas dengan konstanta sel 1cm-1 mampu melakukan pengukuran konduktivitas pada jangkauan nilai 163µS/cm sampai 756µS/cm dengan tingkat kesalahan rata-rata 1% dan tingkat ketidakstabilan rata-rata 3%. Sensor konduktivitas dengan konstanta sel 2cm-1 mampu melakukan pengukuran konduktivitas pada jangkauan nilai 1199µS/cm sampai 2090µS/cm dengan tingkat kesalahan rata-rata 1% dan tingkat ketidakstabilan rata-rata 1%. Sensor konduktivitas dengan konstanta sel 5cm-1 mampu melakukan pengukuran konduktivitas pada jangkauan nilai 3750µS/cm sampai 5690µS/cm dengan tingkat kesalahan rata-rata 0% dan tingkat ketidakstabilan rata-rata 1%. Sistem juga mampu melakukan koreksi suhu pada pengukuran konduktivitas dan melakukan komunikasi dengan sistem akuisisi data.
ix
ABSTRACT
People who live on the edge of river, raising fishes for their living. Rivers with high quality water can increase the lifetimeof fishes. But, if the water contaminated by harmful chemical then the lifetime of fishes will decrease. The function of “Fish Pond Water Conductivity Measurement System” is measured conductivity value of water. This information is used as data monitoring in data acquisition system and control indicator in system control.
This system uses DC voltage as excitation sourcein two pole electrodes. There are four conductivity sensors with four constant cell values, 1cm-1, 2cm-1, 5cm-1 and 10cm-1. The system will measures water conductivity if received instruction from acquisition system. Fish Pond Water Conductivity Measurement System and acquisition system communicate using RS-485.
Four conductivity sensors with four constant cell values 1cm-1, 2cm-1, 5cm-1 and 10cm-1 able to measuring conductivity on 0µS/cm-5000µS/cm. Every sensor has a different range. Sensors with constant cell 1cm-1 is able to measuring on 163µS/cm-756 µS/cm with 1% average of error and 3% unstable level. Sensors with constant cell 2cm-1 is able to measuring on 1199µS/cm-2090µS/cm with 1% average of error and 1% unstable level. Sensors with constant cell 5cm-1 is able to measuring on 3750µS/cm-5690µS/cm with 0% average of error and 1% unstable level. The system is able to correct water temperature change and communicate with acquisition system.
x
KATA PENGANTAR
Syukur kepada Tuhan Yesus Kristus atas segala penyertaan dan kasih-Nya
sehingga tugas akhir dengan judul ”Sistem Pengukuran Konduktivitas Air Kolam Ikan” ini dapat diselesaikan dengan baik.
Tugas akhir ini dapat diselesaikan dengan bantuan banyak pihak. Oleh karena itu
penulis ingin mengucapkan terima kasih kepada:
1. Kedua orang tua tercinta atas doa dan motivasi kepada penulis.
2. Bapak Martanto, S.T., M.T., selaku dosen pembimbing atas bimbingan
selama pengerjaan tugas akhir ini.
3. Seluruh dosen teknik elektro dan laboran yang memberikan ilmu dan
pengetahuan kepada penulis selama masa kuliah.
4. Teman-teman teknik elektro angkatan 2010 yang selalu memberikan
semangat dalam pengerjaan tugas akhir ini.
Tugas akhir ini memiliki banyak kelemahan sehingga penulis mengharapkan
kritik dan saran untuk pengembang tugas akhir ini. Akhir kata, semoga tugas akhir ini
dapat bermanfaat bagi semua pihak. Terima kasih.
Penulis
xi
DAFTAR ISI
Halaman
HALAMAN JUDUL
... iHALAM PERSETUJUAN
... iiiHALAMAN PENGESAHAN
... ivPERNYATAAN KEASLIAN KARYA
... vHALAMAN PERSEMBAHAN DAN MOTO HIDUP
... viLEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA
ILMIAH UNTUK KEPENTINGAN AKADEMIS
... viiINTISARI
... viiiABSTRACT
... ixKATA PENGANTAR
... xDAFTAR ISI
... xiDAFTAR GAMBAR
... xivDAFTAR TABEL
... xviBAB I PENDAHULUAN
... 11.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat Penelitian ... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 3
BAB II DASAR TEORI
... 52.1. Air Kolam Ikan ... 5
2.2. Konduktivitas Listrik ... 5
2.2.1. Konstanta Sel ... 6
2.2.2. Efek Suhu ... 8
2.2.3. Metode Pengukuran Konduktivitas ... 9
2.3. Rangkaian Pembagi Tegangan ... 10
2.4. Sensor Suhu ... 11
2.5. LCD(Liquid Crystal Display) ... 12
xii
2.6.1. Arsitektur dan Konfigurasi Pin ATMega32 ... 13
2.6.2. ADC(Analog to Digital Converter) ATMega32 ... 14
2.6.3. Komunikasi Serial USART ATMega32 ... 15
2.7. Komunikasi Serial RS-485 ... 17
2.8. Regulator Tegangan ... 18
2.9. Relay Elektromekanis ... 20
2.10. Transistor BJT Sebagai Saklar ... 21
BAB III PERANCANGAN PENELITIAN
... 243.1. Arsitektur Sistem ... 24
3.2. Perancangan Sensor Konduktivitas ... 25
3.2.1. Perancangan Konstanta Sel ... 25
3.2.2. Perancangan Rangkaian Sensor Konduktivitas ... 26
3.3. Perancangan Sensor LM35 ... 27
3.4. Perancangan Catu Daya 5 Volt ... 28
3.5. Perancangan Minimum Sistem ... 29
3.6. Perancangan Rangkaian Tombol Tekan ... 31
3.7. Perancangan Rangkaian LCD 16x2 ... 31
3.8. Perancangan Program ... 32
3.8.1. Flowchart Subroutine Pemilihan Nilai KonstantaSel ... 33
3.8.2. Flowchart Subroutine Terima Data ... 34
3.8.3. Flowchart Subroutine Pengukuran Nilai Konduktivitas ... 35
3.8.4. Flowchart Subroutine Kirim Data ... 37
BAB IV HASIL DAN PEMBAHASAN
... 394.1. Perangkat Sistem Pengukuran Konduktivitas Air Kolam Ikan ... 39
4.2. Pengoperasian Sistem Pengukuran Konduktivitas Air Kolam Ikan ... 45
4.3. Pengujian Sistem Pengukuran Konduktivitas Air Kolam Ikan ... 47
4.3.1. Pengujian Larutan NaOH ... 47
4.3.2. Hasil Pengukuran Sistem pada Larutan NaOH ... 48
4.3.3. Hasil Pengukuran Sistem pada Air Habitat Ikan Dan Air Kolam Sistem Kontrol ... 52
4.4. Pengujian Subsistem Pengukuran Konduktivitas Air Kolam Ikan ... 54
4.4.1. Pengujian Catu Daya 5 Volt ... 54
xiii
4.4.3. Pengujian Rangkaian Tombol Tekan ... 57
4.4.4. Pengujian ADC untuk Sensor Konduktivitas ... 57
4.4.5. Pengujian Pengukuran Resistansi ... 60
4.4.6. Pengujian Sensor Suhu ... 61
4.4.7. Pengujian Koreksi Suhu ... 62
4.4.8. Pengujian Rangkaian Driver Relay ... 65
4.4.9. Pengujian Komunikasi Serial RS-485 ... 65
BAB V KESIMPULAN DAN SARAN
... 685.1. Kesimpulan ... 68
5.2. Saran ... 68
DAFTAR PUSTAKA
... 70LAMPIRAN
LAMPIRAN A Data Hasil Pengukuran Konduktivitas Larutan
NaOH di LAB BBTKLPP Yogyakarta ... L1
LAMPIRAN B Listing Program Mikrokontroler ... L4
LAMPIRAN C Rangkaian Elektronik Sistem ... L10
LAMPIRAN D Data Hasil Pengukuran Sistem ... L12
LAMPIRAN E Perancangan Resistor RS ... L21
LAMPIRAN F Alat Ukur Konduktivitas Benchtop H 208G ... L23
LAMPIRAN G Flowchart Pengoperasian Sensor Konduktivitas dengan
xiv
DAFTAR GAMBAR
Halaman
Gambar 1.1. Blok Diagram Sistem Monitoring Kualitas Air Kolam Ikan ... 3
Gambar 2.1. Elektroda dengan KC = 1cm-1[12] ... 6
Gambar 2.2. Model Elektroda untuk Pengukuran Konduktivitas[12] ... 7
Gambar 2.3. Grafik Koreksi Suhu pada Pengukuran Konduktivitas[13] ... 9
Gambar 2.4. Rangkaian Pembagi Tegangan[14] ... 10
Gambar 2.5. Bentuk Fisik Sensor Suhu LM35[16] ... 11
Gambar 2.6. LCD 16 x 2[17] ... 12
Gambar 2.7. Konfigurasi Pin ATMega32[18] ... 13
Gambar 2.8. Konfigurasi Pin IC MAX485[19] ... 17
Gambar 2.9. Rangkaian Regulator Tegangan DC[20] ... 19
Gambar 2.10. Rangkaian Penyearah Tegangan AC[20]... 19
Gambar 2.11. Bagian-bagian Relay Elektromekanis[21] ... 20
Gambar 2.12. Konfigurasi Common Emitter[20] ... 21
Gambar 2.13. Garis Beban DC Transistor N-P-N[20] ... 22
Gambar3.1. Blok Diagram Sistem Pengukuran Konduktivitas Air Kolam Ikan ... 24
Gambar 3.2. Elektroda dengan Kc =1cm-1 ... 25
Gambar 3.3. Elektroda dengan Kc = 2cm-1 ... 25
Gambar 3.4. Elektroda dengan Kc = 5cm-1 ... 26
Gambar 3.5. Elektroda dengan Kc =10cm-1 ... 26
Gambar 3.6. Rangkaian Sensor Konduktivitas ... 27
Gambar 3.7. Skema Rangkaian Sensor LM35 ... 27
Gambar 3.8. Catu Daya 5 Volt ... 28
Gambar 3.9. Rangkaian ATMega32 ... 29
Gambar 3.10. Rangkaian Clock Eksternal, Rangkaian Reset dan RS-485 ... 30
Gambar 3.11. RangkaianTombol Tekan ... 31
Gambar 3.12. Rangkaian LCD 16x2 ... 32
Gambar 3.13. Flowchart Progam Sistem Pengukuran Konduktivitas Air Kolam Ikan ... 32
Gambar 3.14. Flowchart Subroutine Pemilihan Nilai Konstanta Sel ... 33
Gambar 3.15. Flowchart Subroutine Terima Data ... 34
xv
Gambar 3.17. Flowchart Subroutine Konversi ADC ... 36
Gambar 3.18. Flowchart Subroutine Hitung Nilai Konduktivitas ... 37
Gambar 3.19. Flowchart Subroutine Kirim Data ... 37
Gambar4.1. Perangkat Sistem Pengukuran Konduktivitas Air Kolam Ikan ... 39
Gambar 4.2. Terminal AC 220 Volt dan Saklar On-Off Kotak Pengukuran ... 40
Gambar 4.3. Rangkaian Catu Daya 5 Volt ... 40
Gambar 4.4. Rangkaian Minimum Sistem ... 41
Gambar 4.5. TombolTekan dan LCD ... 41
Gambar 4.6. Terminal Komunikasi RS-485 dan Terminal Sensor ... 42
Gambar 4.7. Kerangka Sensor Konduktivitas KC=1cm-1 ... 42
Gambar 4.8. Sensor Suhu ... 43
Gambar 4.9. Grafik Penurunan Nilai Konduktivitas Terhadap Waktu ... 43
Gambar 4.10. Rangkaian Driver Relay ... 44
Gambar 4.11. Skema Pengoperasian Sistem ... 45
Gambar 4.12. Tampilan Hasil Pengukuran dengan KC=1cm-1 ... 46
Gambar4.13. Hubungan Konsentrasi dan Konduktivitas Larutan NaOH ... 47
Gambar 4.14. Hubungan Pengukuran Alat Ukur Baku dan Sistem ... 49
Gambar 4.15. Jangkauan Pengukuran Konstanta Sel 1cm-1, 2cm-1 dan 5cm-1 ... 50
Gambar 4.16. Listing Program LCD ... 56
Gambar 4.17. Tampilan LCD “PILIH SENSOR” dan“ K=1 K=2 K=5 K=10” ... 56
Gambar 4.18. Listing Program Tombol Tekan ... 57
Gambar 4.19. Tampilan LCD untuk Pilihan Konstanta Sel “K=1” ... 57
Gambar 4.20. Listing Program Konversi ADC ... 58
Gambar 4.21. Pengaruh Perubahan Tegangan 0,01Volt ... 59
Gambar 4.22. Listing Program Pengukuran Resistansi ... 60
Gambar 4.23. Listing Program Sensor Suhu ... 61
Gambar 4.24. Pengukuran Suhu oleh Sistem dan Alat Ukur Baku ... 62
Gambar 4.25. Listing Program Koreksi Suhu ... 63
Gambar 4.26. Listing Program Driver Relay ... 65
xvi
DAFTAR TABEL
Halaman
Tabel 2.1. Standar Kualitas Air Kolam Ikan[8][9] ... 5
Tabel 2.2. Jangkauan Pengukuran Konstanta Sel[11] ... 7
Tabel 2.3. Fungsi Pin LCD 16x2[17] ... 12
Tabel 2.4. USART Baudrate Register[18] ... 15
Tabel 2.5. Perhitungan Nilai UBRR[18] ... 15
Tabel 2.6. Register UCSRA[18] ... 15
Tabel 2.7. Register UCSRB[18] ... 16
Tabel 2.8. Setting untuk Ukuran Karakter[18] ... 16
Tabel 2.9. Register UCSRC[18] ... 17
Tabel 2.10. Mode Paritas[18] ... 17
Tabel 2.11. Fungsi Pin IC MAX485[19] ... 18
Tabel 2.12. Tegangan Masukan Minimum pada IC LM78xx[20] ... 18
Tabel 3.1. Fungsi Port ATMega32 ... 29
Tabel 4.1. Hasil Pengukuran Konduktivitas Alat Ukur Baku dan Sistem ... 48
Tabel 4.2. Tingkat Ketidakstabilan Hasil Pengukuran Konduktivitas KC=1cm-1 ... 51
Tabel 4.3. Tingkat Ketidakstabilan Hasil Pengukuran Konduktivitas KC=2cm-1 ... 51
Tabel 4.4. Tingkat Ketidakstabilan Hasil Pengukuran Konduktivitas KC=5cm-1 ... 52
Tabel 4.5. Hasil Pengukuran Konduktivitas Air Habitat Ikan ... 53
Tabel 4.6. Hasil Pengukuran Konduktivitas Air Kolam Sistem Kontrol ... 53
Tabel 4.7. Perbandingan Tegangan Catu Daya Perancangan dan Pengukuran ... 54
Tabel 4.8. Persentase Drop Tegangan Catu Daya Satu saat Berbeban... 55
Tabel 4.9. Persentase Drop Tegangan Catu Dua dan Catu Daya Tiga saat Berbeban .... 56
Tabel 4.10. Tegangan Hasil Pengukuran dan Hasil Konversi pada Pin ADC0-ADC3 ... 58
Tabel 4.11. Pengaruh perubahan 0,01Volt Terhadap Pengukuran Konduktivitas ... 59
Tabel 4.12. Hasil Pengukuran Resistansi oleh Sistem ... 61
Tabel 4.13. Hasil Pengukuran Suhu oleh Sistem dan Alat Ukur Baku ... 62
Tabel 4.14. Hasil Koreksi Suhu untuk Konstanta sel 1cm-1 ... 64
Tabel 4.15. Hasil Koreksi Suhu untuk Konstanta sel 2cm-1 ... 64
Tabel 4.16. Hasil Koreksi Suhu untuk Konstanta sel 5cm-1 ... 64
xvii
Tabel 4.18. Pengiriman dan Penerimaan Data pada Sistem Pengukuran
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Banyak masyarakat di tepian sungai membudidayakan ikan air tawar. Mereka
memanfaatkan aliran air sungai untuk mengisi kolam-kolam tempat budidaya ikan. Sungai
dengan kualitas air yang baik dapat meningkatkan kelangsungan hidup ikan. Namun, jika
air sungai terkontaminasi dengan unsur-unsur kimiawi yang merusak, maka tingkat
kelangsungan hidup ikan menurun. Eka Sari Dewi[1] melakukan penelitian yang
membuktikan bahwa tingkat salinitas air berpengaruh terhadap tingkat kelangsungan hidup
ikan. Nybakken[2] menyatakan bahwa terdapat hubungan antara salinitas dan
konduktivitas. Jika air memiliki tingkat salinitas yang tinggi, maka air tersebut juga
memiliki tingkat konduktivitas yang tinggi.
Kualitas air ditentukan berdasarkan beberapa parameter seperti suhu, kekeruhan,
pH(derajat keasaman), DO(dissolved oxygen) dan konduktivitas[3]. Setiap parameter
memiliki nilai yang berbeda-beda untuk menentukan tingkat kelayakan air sebagai tempat
hidup ikan. Nilai parameter tersebut dapat digunakan sebagai indikator pengamanan
terhadap kualitas air kolam ikan.
Berdasarkan hal di atas, penulis membuat sistem pengukuran konduktivitas air
kolam ikan. Sistem ini dapat dihubungkan dengan sistem akuisisi data dan sistem kontrol
kualitas air. Sistem pengukuran konduktivitas air kolam ikan terdiri dari sensor, display
dan mikrokontroler. Keluaran sistem ini berupa nilai konduktivitas air dalam bentuk paket
data. Paket data digunakan untuk komunikasi dengan sistem akuisisi data dan sistem
kontrol secara serial. Sistem akuisisi data dan sistem kontrol merupakan sistem lain yang
melakukan monitoring dan kontrol terhadap kualitas air kolam ikan.
Penelitian Sergio Ramalho dkk[4], Sumariyah dkk[5] dan Ari Mustaghfirotur
Robah[6] menggunakan tegangan AC(alternating current) sebagai catu daya sensor.
Penggunaan tegangan AC sebagai catu sensor membutuhkan banyak rangkaian pendukung
seperti osilator frekuensi, detektor fase, low pass filter dan pengkondisi sinyal. Sistem
pengukuran konduktivitas air kolam ikan menggunakan tegangan DC(direct current)
sebagai catu daya sensor untuk mengurangi penggunaan banyak rangkaian elektronika.
Sistem pengukuran konduktivitas air kolam ikan merupakan pengembangan dari alat ukur
pengukuran konduktivitas pada suhu air yang tetap, sedangkan sistem pengukuran
konduktivitas air kolam ikan dapat melakukan pengukuran pada suhu air yang
berubah-ubah.
Pada proses pengukuran, sampel air dialirkan melewati sensor konduktivitas dan
sensor suhu. Kedua sensor tersebut menghasilkan keluaran berupa tegangan DC sesuai
dengan nilai konduktivitas dan suhu air. Mikrokontroler mengubah tegangan DC menjadi
data digital menggunakan fasilitas ADC(analog to digital converter). Data digital
digunakan untuk menghitung nilai konduktivitas air berdasarkan algoritma yang
ditetapkan. Mikrokontroler menampilkan nilai konduktivitas dan suhu air pada LCD
(liquid crystal display) serta mengemas nilai konduktivitas dalam paket data untuk dikirim
ke sistem akuisisi data dan sistem kontrol. Sistem akuisisi data menggunakan data
konduktivitas untuk monitoring kualitas air kolam ikan. Sistem kontrol menggunakan data
konduktivitas sebagai indikator kontrol. Jika nilai konduktivitas air kolam ikan melebihi
standar yang ditetapkan yaitu 5000 µS/cm (mikrosiemens/cm) maka sistem kontrol
melakukan aksi kontrol untuk menetralkan nilai konduktivitas air kolam ikan.
1.2.
Tujuan dan Manfaat Penelitian
Tujuan dari penelitian ini adalah menghasilkan sistem pengukuran konduktivitas air
kolam ikan yang dapat dihubungkan secara serial dengan sistem akuisisi data dan sistem
kontrol. Manfaat dari penelitian ini adalah membantu para pembudidaya ikan air tawar
untuk mengetahui tingkat konduktivitas air kolam ikan dan meningkatkan kinerja serta
efisiensi pengamanan kualitas air kolam ikan.
1.3.
Batasan Masalah
Batasan masalah dalam penelitian ini adalah :
a. Sistem pengukuran konduktivitas air kolam ikan merupakan bagian dari sistem
monitoring kualitas air kolam ikan.
b. Nilai konduktivitas air kolam ikan yang diukur adalah 0µS/cm -5000µS/cm.
c. Menggunakan sensor konduktivitas tipe Two Pole Cell yang disuplai tegangan DC.
d. Menggunakan konstanta sel dengan nilai 1cm-1, 2cm-1,5cm-1dan 10cm-1.
e. Menggunakan sensor suhu LM35.
f. Menggunakan mikrokontroler ATMega32.
1.4.
Metodologi Penelitian
Penulisan skripsi ini menggunakan metode-metode:
a. Pengumpulan referensi, artikel dan jurnal ilmiah.
b. Perancangan hardware dan software. Tahap ini bertujuan mencari bentuk
rancangan yang tepat untuk sistem yang dibuat. Hal tersebut dilakukan dengan
mempertimbangkan berbagai aspek permasalahan dan kebutuhan. Perancangan
sistem pengukuran konduktivitas air kolam ikan dilakukan berdasarkan gambar 1.1.
Gambar 1.1. Blok Diagram Sistem Monitoring Kualitas Air Kolam Ikan
Sistem monitoring kualitas air kolam ikan terdiri dari enam subsistem yaitu
pengukuran konduktivitas, pengukuran pH, pengukuran kekeruhan, pengukuran
DO, akuisisi data dan kontrol. Hasil pengukuran empat subsistem pertama dikirim
ke subsistem akuisisi data untuk disimpan dan ditampilkan dalam bentuk grafik.
Subsistem akuisisi data mengirimkan hasil pengukuran dari keempat subsistem
pengukuran ke subsistem kontrol. Subsistem kontrol menggunakan data tersebut
sebagai indikator aksi kontrol terhadap kualitas air kolam ikan. Subsistem
pengukuran konduktivitas terdiri dari beberapa bagian seperti pada gambar 1.1. LCD
Sampel
air
Sensor suhu dan
konduktivitas Mikrokontroler
Pengukuran pH Pengukuran kekeruhan
Pengukuran DO
Akuisisi
Mikrokontroler pada subsistem pengukuran konduktivitas air kolam ikan
menggunakan tegangan DC dari keluaran sensor suhu dan sensor konduktivitas
untuk menghitungan nilai konduktivitas air kolam ikan. Nilai konduktivitas air
kolam ikan yang diperoleh dari hasil perhitungan ditampilkan pada LCD dan
dikemas dalam paket data untuk dikirim ke subsistem akuisisi data secara serial.
Proses pengukuran dan pengiriman dilakukan setelah mikrokontroler menerima
perintah pengukuran yang dikirim oleh subsistem akuisisi data ke subsistem
pengukuran konduktivitas air kolam ikan.
c. Pembuatan hardware dan software. Tahap ini bertujuan untuk merealisasikan
perancangan dan alur kerja dari sistem seperti yang diterangkan pada bagian
perancangan hardware dan software.
d. Pengambilan data. Data yang diambil adalah keluaran setiap subsistem seperti
tegangan keluaran sensor suhu, keluaran sensor konduktivitas, pembacaan ADC,
nilai konduktivitas pada LCD dan data hasil pengiriman pada sistem akuisisi data.
Proses pengambilan data dilakukan pada sampel air dengan nilai konduktivitas
yang berbeda-beda.
e. Analisis dan kesimpulan penelitian. Analisis terhadap sistem dilakukan dengan
membandingkan nilai konduktivitas hasil pengukuran sistem dan hasil pengukuran
alat ukur terkalibrasi. Analisis terhadap subsistem dilakukan dengan melihat
pengaruh keluaran subsistem terhadap keluaran sistem utama. Penyimpulan hasil
percobaan didasarkan pada tingkat kesesuaian antara nilai konduktivitas hasil
pengukuran sistem dengan nilai konduktivitas hasil pengukuran alat ukur
5
BAB II
DASAR TEORI
Bab ini berisikan teori-teori sebagai dasar dalam perancangan sistem pengukuran
konduktivitas air kolam ikan. Teori-teori yang digunakan adalah air kolam ikan,
konduktivitas listrik, rangkaian pembagi tegangan, sensor suhu LM35, mikrokontroler
ATMega32, ADC ATMega32, LCD 16x2, komunikasi serial ATMega32, komunikasi
serial RS-485, regulator tegangan, relay elektromekanis dan transistor BJT sebagai saklar.
2.1.
Air Kolam Ikan[8]
Air kolam ikan adalah air yang digunakan untuk budidaya ikan yang berada di
kolam. Kolam berfungsi menampung air dalam jumlah tertentu untuk pemeliharaan ikan
dan atau hewan air lain. Berdasarkan pengertian teknis, kolam merupakan suatu perairan
buatan yang luasnya terbatas dan sengaja dibuat manusia agar mudah dikelola dalam hal
pengaturan air, jenis hewan budidaya dan target produksi. Kolam selain sebagai media
hidup ikan juga harus berfungsi sebagai sumber makanan alami bagi ikan, artinya kolam
harus berpotensi untuk dapat menumbuhkan makanan alami.
Kolam ikan dengan kualitas air yang baik dapat menunjang kehidupan ikan dan
organisme lain di dalamnya. Tingkat kualitas air kolam ikan ditentukan berdasarkan nilai
parameter yang telah ditetapkan. Berikut parameter-parameter yang harus dipenuhi untuk
mendapatkan kualitas air kolam ikan yang baik.
Tabel 2.1. Standar Kualitas Air Kolam Ikan[8][9]
No Parameter Rentang nilai Satuan 1 Suhu 25-30 oC 2 Keasaman 6,7-8,6 pH 3 Oksigen Terlarut 5-6 ppm 4 Kekeruhan 25-100 JTU 5 Konduktivitas 0-5000 µS/cm
2.2.
Konduktivitas Listrik[10]
Konduktivitas listrik (electrical conductivity) adalah ukuran kemampuan suatu
parameter untuk mengukur konsentrasi ion dan aktivitas suatu larutan. Semakin banyak
garam, asam atau alkali dalam larutan, semakin tinggi nilai konduktivitas.
2.2.1.
Konstanta Sel[11]
Konstanta sel adalah rasio antara jarak dan luas area dari elektroda yang digunakan
sebagai sensor konduktivitas. Konstanta sel dirumuskan pada persamaan 2.1.
(2.1)
Keterangan:
KC = Konstanta sel (cm-1)
A = Luas area elektroda (cm2)
d = Jarak antara elektroda (cm)
Nilai KC (konstanta sel) yang sering digunakan sebagai standar pengukuran
konduktivitas adalah 1cm-1. Konstanta sel 1cm-1 memiliki panjang elektroda sebesar 1cm,
lebar elektroda sebesar 1cm dan jarak antara kedua elektroda sebesar 1cm. Bentuk
elektroda sensor konduktivitas dengan ukuran konstanta sel 1cm-1 ditunjukan pada gambar
2.1.
Gambar 2.1. Elektroda dengan KC = 1cm-1[12]
Nilai konstanta sel sensor konduktivitas tidak selalu 1cm-1, namun dapat disesuaikan
Tabel 2.2. Jangkauan Pengukuran Konstanta Sel[11]
Konfigurasi elektroda sensor untuk pengukuran konduktivitas dapat dibuat seperti
gambar 2.2. Sisi A dan sisi B terbuat dari bahan konduktor sedangkan sisi yang lain terbuat
dari bahan isolator. Jika model sensor konduktivitas tersebut diisi dengan larutan yang
memiliki nilai konduktivitas tertentu, maka nilai konduktansinya dapat dihitung dengan
persamaan 2.2.
Persamaan konduktivitas diperoleh dari hasil subtitusi persamaan 2.1 ke persamaan
2.2 seperti yang ditunjukan pada persamaan 2.3.
(2.3)
Konduktivitas secara matematis adalah perkalian konstanta sel dan konduktansi. Prinsip
yang sama juga berlaku untuk menentukan nilai resistansi larutan yang ditunjukan pada
persamaan 2.4.
(2.4)
Keterangan:
R = Resistansi ( ohm )
ρ = Resistivitas ( ohm.cm ) l = Jarak antara elektroda A dan B ( cm )
A = Luas area elektroda A dan B ( cm2 )
2.2.2.
Efek Suhu[13]
Pengukuran konduktivitas bergantung pada suhu. Suhu yang meningkat
menyebabkan ion-ion yang terdapat pada air lebih mudah bergerak. Ion yang mudah
bergerak mengakibatkan lebih banyak arus listrik yang mengalir dari elektroda satu ke
elektroda yang lain sehingga konduktivitas meningkat.
Suhu referensi digunakan sebagai pembanding hasil pengukuran konduktivitas pada
suhu yang berubah-ubah. Suhu referensi yang digunakan adalah 25°C. Alat ukur
konduktivitas mengukur konduktivitas dan suhu air, kemudian mengubah nilai
konduktivitas pengukuran berdasarkan suhu referensi menggunakan fungsi koreksi suhu
seperti yang ditunjukan pada persamaan 2.5.
-
(2.5)
Keterangan:
σ
= Konduktivitas pada suhu referensi (µS/cm)σ
= Konduktivitas pada suhu pengukuran (µS/cm) T = Suhu pengukuran (oC)TRef = Suhu referensi (oC)
Grafik koreksi suhu pada gambar 2.3 menunjukan bahwa koreksi suhu akurat pada batas T1
= 26°C dan T2 = 14°C dengan TRef = 25°C. Perbedaan T dan TRef yang besar dapat
meningkatkan resiko error pada perhitungan nilai konduktivitas.
Gambar 2.3. Grafik Koreksi Suhu pada Pengukuran Konduktivitas[13]
2.2.3.
Metode Pengukuran Konduktivitas[10]
Metode pengukuran konduktivitas terdiri dari metode kontak dan metode induktif.
Penggunaan kedua metode tersebut tergantung dari nilai konduktivitas, jumlah padatan
tersuspensi dan sifat korosif larutan. Metode induktif lebih baik pada pengukuran larutan
yang bersifat korosif, tersuspensi dan memiliki nilai konduktivitas tinggi. Pada penilitian
ini, air yang menjadi objek pengukuran tidak bersifat korosif dan tersuspensi sehingga
metode pengukuran yang digunakan adalah metode kontak.
Rangkaian sensor konduktivitas pada metode kontak terdiri dari elektroda sensor
dan analyzer. Analyzer (rangkaian kontrol) berfungsi menyuplai tegangan ke elektroda
sensor yang terbuat dari stainless steel atau titanium untuk menghasilkan medan listrik.
Medan listrik menyebabkan ion bergerak sehingga menghasilkan arus listrik. Analyzer
mengukur beda potensial pada elektroda sensor dan menggunakan hukum ohm untuk
menghitung hambatan dari larutan. Nilai hambatan larutan digunakan untuk menghitung
2.3.
Rangkaian Pembagi Tegangan[14]
Arus listrik yang mengalir melewati suatu penghantar selalu berbanding lurus
dengan beda potensial yang diterapkan padanya. Beda potensial pada suatu hambatan
secara matematis adalah perkalian besar hambatan dengan arus yang mengalir melewati
hambatan tersebut.
Gambar 2.4. Rangkaian Pembagi Tegangan[14]
Variabel Vin adalah sumber tegangan konstan yang menyuplai resistor R1 dan R2
seperti pada gambar 2.4. Resistor R1 dan R2 disusun secara serial sehingga total hambatan
kedua resistor tersebut adalah penjumlahan besar resistor R1 dan R2. Besar arus listrik yang
mengalir melewati kedua resistor tersebut diperoleh dari perkaliam antara sumber tegangan
Vin dan hasil perbandingan salah satu resistor dengan penjumlahan besar resistor R1 dan
R2.
Teori diatas menghasilkan perhitungan nilai tegangan pada resistor R1 sepertiyang
ditunjukan pada persamaan 2.6.
VR1 = (2.6)
dengan proses yang sama, tegangan pada resistor R2 dapat dihitung dengan persamaan 2.7.
2.4.
Sensor Suhu[15]
Sensor suhu yang digunakan pada penelitian ini adalah sensor LM35. Sensor LM35
memiliki keakuratan tinggi dan kemudahan perancangan dibanding sensor suhu yang lain.
Sensor LM35 mempunyai keluaran impedansi yang rendah dan linieritas yang tinggi,
sehingga dapat dihubungkan dengan rangkaian kendali khusus. Sensor LM35 memiliki
akurasi sebesar 0,5ºC pada suhu 25ºC dan jangkauan maksimal antara -55ºC sampai
+150ºC. Sensor suhu LM35 bekerja pada tegangan 4 volt sampai 20 volt dengan arus
kurang dari 60µA. Arus kerja yang kecil menghasilkan self-heating yang kurang dari 0,1ºC
pada udara diam.
Penelitian ini menggunakan sensor LM35 dengan kemasan TO-92 seperti pada
gambar 2.5.
Gambar 2.5. Bentuk Fisik Sensor Suhu LM35[16]
Sensor LM35 memiliki tiga pin. Pin satu adalah pin sumber tegangan. Pin tiga
adalah pin ground. Pin dua adalah pin tegangan keluaran. Tegangan keluaran sensor LM35
memiliki jangkauan dari 0 volt sampai dengan 1,5 volt. Tegangan keluaran sensor LM35
bertambah sebesar 0,01 volt setiap kenaikan 1oC. Tegangan keluaran sensor LM35 dapat
dihitung menggunakan persamaan 2.8.
2.5.
LCD(Liquid Crystal Display)[17]
LCD adalah display dengan cairan kristal yang diopersikan menggunakan sistem
dot matriks. LCD banyak digunakan sebagai display dari alat-alat elektronik seperti
kalkulator, multitester digital dan jam digital. Penelitian ini menggunakan LCD dengan
ukuran 16x2. LCD 16x2 memiliki ukuran lebar display 16 kolom dan 2 baris dengan 16
pin konektor. LCD 16x2 ditunjukkan pada gambar 2.6.
Gambar 2.6. LCD 16x2[17]
Setiap pin pada LCD 16x2 memiliki fungsi yang berbeda-beda. Fungsi Pin LCD
16x2 terdapat pada tabel 2.3.
Tabel 2.3. Fungsi Pin LCD 16x2[17]
No Pin Nama pin Fungsi
1 1 VSS Ground voltage
2 2 VCC 5 volt
3 3 VEE Contrast voltage
4
4 RS
Register select
5 0=Instruction register
6 1= Data register
7 5
R/W
Read/Write
8 0 = Write mode
9 1= Read mode
10
6 E
Enable
11 0 = To start latch data to LCD character
12 1=Disable
13 7-14 DB0 - DB7 Data bit ke-0 (LSB) - data bit ke-7 (MSB) 14 15 BPL Black plane light
2.6.
Mikrokontroler ATMega32[18]
2.6.1.
Arsitektur dan Konfigurasi Pin ATMega32[18]
Mikrokontroler merupakan perangkat yang terintegrasi dengan I/O port, RAM,
ROM, sehingga dapat digunakan untuk berbagai keperluan kontrol. Mikrokontroler 8-bit
yang dikembangkan oleh Atmel dengan arsitektur RISC (Reduced Instruction Set
Computer) dapat mencapai throughput eksekusi instruksi 1MIPS (Million Instruction Per
Second). Mikrokontroler AVR dapat dikelompokkan menjadi 4 kelas yaitu ATtiny,
AT90xx, ATmega, dan AT86RFxx. Kelas mikrokontroler AVR dibedakan berdasarkan
ukuran memori, peripheral, speed dan operasi tegangan, sedangkan arsitektur dan instruksi
yang digunakan hampir sama. Konfigurasi pin ATMega32 ditunjukan pada gambar 2.7.
Gambar 2.7. Konfigurasi Pin ATMega32[18]
Konfigurasi pin ATMega32 dijelaskan sebagai berikut:
a. Pin 1 sampai pin 8(Portb) merupakan port parallel 8-bit dua arah(bidirectional)
yang dapat digunakan untuk general purpose dan special feature.
b. Pin 9 adalah pin reset yang aktif jika mendapat minimumpulse.
c. Pin 10 adalah pin VCC yang dihubungkan ke sumber tegangan 2,7-5,5 volt.
e. Pin 12(XTAL2) adalah pin masukan ke rangkaian osilator internal. XTAL2 dapat
menggunakan osilator kristal atau sumber osilator luar sebagai sumber masukan.
f. Pin 13(XTAL1) adalah pin keluaran dari rangkaian osilator internal. Pin ini dipakai
bila menggunakan osilator kristal.
g. Pin 14 sampai 21(Portd) adalah port 8-bit dua arah(bi-directional I/O) dengan
internal pull-up resistors untuk general purpose dan special feature.
h. Pin 22 sampai 29(Portc) adalah port 8-bit dua arah(bi-directional I/O) dengan
internal pull-up resistors untuk general purpose dan special feature.
i. Pin 30 adalah pin AVCC yang dihubungkan ke VCC jika menggunakan fasilitas
ADC. Pin ini menyuplai daya untuk porta dan A/D converter.
j. Pin 32 adalah pin AREF yang berfungsi sebagai referensi untuk pin analog jika
menggunakan fasilitas A/D Converter.
k. Pin 33 sampai 40(Porta) adalah port 8-bit dua arah(bi-directional I/O) dengan
internal pull-up resistors untuk general purpose.
2.6.2.
ADC(Analog to Digital Converter) ATMega32[18]
ADC pada ATMega32 merupakan ADC 10-bit tipe Successive Approximation.
Terdapat delapan kanal ADC dengan ukuran 10-bit. ADC dapat digunakan dengan
memberikan masukan tegangan pada port ADC yaitu porta. ADC memiliki dua jenis mode
yaitu single conversion dan free running. Pada mode single conversion pengguna
mengaktifkan ADC setiap kali melakukan konversi data, sedangkan pada mode free
running pengguna hanya sekali mengaktifkan ADC.
ADC dilengkapi dengan rangkaian sampler yang dapat menahan tegangan masukan
sehingga tegangan tetap konstan selama proses konversi. ADC mempunyai catu daya yang
terpisah yaitu pin AVCC-AGND. Konversi ADC menjadi keliru jika tegangan AVCC
berbeda ±0,3 volt dari tegangan VCC dan sinyal masukan ADC melebihi tegangan
referensi. Nilai digital untuk resolusi 10-bit dihitung menggunakan persamaan 2.9,
sedangkan data tegangan pada pin ADC dihitung menggunakan persamaan 2.10.
. 1023 (2.9)
2.6.3.
Komunikasi Serial USART ATMega32[18]
Universal synchronous and asynchronous serial receiver and transmitter adalah
layanan komunikasi serial yang dimiliki oleh ATMega32. UBRR (USART baud rate
register) adalah register 16-bit yang berfungsi menentukan kecepatan transmisi data saat
terjadi komunikasi serial. UBRR dibagi menjadi dua bagian yaitu UBRRH dan UBRRL.
Tabel 2.4. USART Baudrate Register[18]
Register Keterangan URSEL - - - UBRR[11..8] UBRRH
UBRR[7..0] UBRRL
a. URSEL adalah bit pemilih antara UBRR dan UCSR.
b. UBRR adalah tempat menyimpan konstanta penentu kecepatan komunikasi serial.
Tabel 2.5. Perhitungan Nilai UBRR[18]
NO Operating mode Equation for alculation baud rate
a. RXC bernilai satu jika ada data yang belum terbaca dan bernilai nol jika tidak ada
data.
b. TXC bernilai satu jika keseluruhan data sudah terkirim.
c. UDRE adalah interupsi yang aktif jika UDRIE pada UCSRB diberi nilai satu.
UDRE bernilai satu jika buffer kosong dan bernilai nol jika buffer penuh.
e. DOR bernilai satu jika terjadi over run data, artinya register penerima telah penuh
dan terdapat data baru yang menunggu.
f. PE bernilai satu jika terjadi error pada paritas.
g. U2X digunakan pada mode asinkron.
h. MPCM digunakan pada proses multiprocessor.
Register UCSRB berfungsi mengatur komunikasi serial. Bagian-bagian register
UCSRB ditunjukan pada tabel 2.7.
Tabel 2.7. Register UCSRB[18]
Register Keterangan RXCIE TXCIE UDRIE RXEN TXEN UCSZ2 RXB8 TXB8 UCSRB
a. RXCIE berfungsi untuk mengatur interupsi pada penerimaan data serial. RXCIE
bernilai satu saat interupsi diaktifkan dan bernilai nol saat intrupsi tidak aktif.
b. TXCIE berfungsi untuk mengatur interupsi pada pengiriman data serial. TXCIE
bernilai satu saat interupsi diaktifkan dan bernilai nol saat intrupsi tidak aktif.
c. UDRIE berfungsi untuk mengaktifkan interupsi pada UDRE. Jika UDRIE bernilai
satu maka interupsi aktif.
d. RXEN berfungsi untuk mengaktifkan mode penerimaan data serial.
e. TXEN berfungsi untuk mengaktifkan mode pengiriman data serial.
f. UCZ2 pada UCSRB dan UCZ1, UCZ0 pada UCSRC berfungsi untuk mengatur
ukuran karakter serial yang dikirimkan.
Tabel 2.8. Setting untuk Ukuran Karakter[18]
No UCZ2 UCZ1 UCZ0 Ukuran karakter (bit)
1 0 0 0 5
2 0 0 1 6
3 0 1 0 7
4 0 1 1 8
5 100-110 tidak digunakan
6 1 1 1 9
Register UCSRC berfungsi mengatur mode kecepatan komunikasi serial.
Tabel 2.9. Register UCSRC[18]
Resgister Keterangan URSEL UMSEL UPM1 UPM0 USBS UCZ1 UCSZ0 UCPOL8 UCSRC
a. URSEL adalah bit pemilih antara UBRR dan UCSRC
b. UMSEL adalah bit pemilih antara komunikasi sinkron atau komunikasi asinkron.
UMSEL diberi nilai satu untuk komunikasi sinkron dan diberi nilai nol untuk
komunikasi asinkron.
c. UPM [1..0] adalah bit pengatur paritas.
Tabel 2.10. Mode Paritas[18]
No UPM1 UPM0 Mode paritas 1 0 0 Tidak aktif 2 0 1 Tidak digunakan 3 1 0 Paritas genap 4 1 1 Paritas ganjil
a. USBS adalah bit pemilih ukuran stop bit. USBS diberi nilai nol untuk jumlah
paritas satu dan diberi nilai satu untuk jumlah paritas dua.
b. UCSZ[1..0] adalah bit pengatur jumlah karakter serial.
c. UCPOL adalah bit pengatur hubungan antara perubahan data keluaran dan masukan
serial dengan clock sinkronisasi.
2.7.
Komunikasi Serial RS-485[19]
RS-485 adalah standar yang digunakan untuk komunikasi serial pada jarak jauh.
RS-485 dapat menghubungkan 32 unit beban dengan dua kabel tanpa referensi ground
yang sama untuk setiap unit beban. RS-485 mengubah level tegangan TTL menjadi selisih
tegangan antara keluaran pin A dan pin B IC MAX485 untuk meminimalkan noise.
Rangkaian RS-485 terdiri dari jaringan multidrop dan IC MAX485. IC MAX485
memiliki beberapa pin dengan fungsi yang berbeda-beda. Konfigurasi pin IC MAX485
ditunjukan pada gambar 2.8, sedangkan fungsi pin IC MAX485 ditunjukan pada tabel 2.11.
Tabel 2.11. Fungsi Pin IC MAX485 [19]
Pin Simbol Fungsi Pin
6 A Non-Inverting Receiver Input and Non-Inverting Driver Output
7 B Inverting Receiver Input and Inverting Drive Output
8 Vcc Supply Voltage
2.8.
Regulator Tegangan[20]
Penelitian ini menggunakan regulator tegangan positif berupa IC LM78xx yang
dilengkapi dengan pembatas arus. IC LM78xx terdiri dari tiga pin yaitu pin tegangan
masukan, pin ground dan pin tegangan keluaran. IC LM78xx bekerja sebagai regulator
tegangan DC yang stabil jika mendapat tegangan input lebih dari atau sama dengan MIV
(Minimum Input Voltage). Arus maksimum beban output IC LM78xx yang diperbolehkan
kurang dari atau sama dengan MC (maximum current). Level tegangan minimum untuk
pengoperasian IC LM78xx ditunjukan pada tabel 2.12.
Tabel 2.12. Tegangan Masukan Minimum pada IC LM78xx [20]
Sebagai regulator tegangan, IC LM78xx dapat dirangkai seperti gambar 2.9.
Gambar 2.9. Rangkaian Regulator Tegangan DC[20]
Rangkaian diatas membutuhkan tegangan masukan yang lebih atau sama dengan level
tegangan minimum IC LM78xx. Penelitian ini menggunakan tegangan masukan yang
bersumber dari tegangan transformator. Tegangan transfomator yang masih berupa
tegangan AC disearahkan menggunakan jembatan dioda dan difilter menggunakan
kapasitor seperti yang ditunjukan pada gambar 2.10.
Gambar 2.10. Rangkaian Penyearah Tegangan AC[20]
Nilai kapasitor C dihitung menggunakan persamaan 2.11.
C
=
√
(2.11)
Keterangan:
C = Kapasitor (µFarad)
= Arus beban (mA)
f = Frekuensi (Hz) = Tegangan ripple rms (volt)
-
(2.12)
Vr(p-p) atau tegangan ripple peak to peak merupakan selisih antara tegangan keluaran
jembatan dioda dengan tegangan masukan minimum IC LM78xx. Tegangan ripple peak to
peak dihitung menggunakan persamaan 2.13.
( - ) - (2.13)
Keterangan:
Vm = Tegangan keluaran jembatan dioda (volt)
Vmin = Tegangan minimum masukan IC LM78xx (volt)
Jika tegangan masukan regulator berasal dari tegangan AC yang kemudian
disearahkan menggunakan dioda, maka nilai Vm dapat dihitung menggunakan persamaan
2.14.
√ - (2.14) Vac merupakan tegangan AC yang sudah diturunkan menggunakan transformator
step-down. Tegangan Vac dikurangi dengan nilai 1,4 volt jika rangkaian regulator tegangan
menggunakan penyearah gelombang penuh untuk menyearahkan tegangan AC dari
transformator.
2.9.
Relay Elektromekanis[21]
Relay elektromekanis adalah relay yang menghasilkan pergerakan atau kontak saat
mendapatkan energi listrik. Relay elektromekanis terdiri dari dua bagian yaitu coil dan
contact. Bagian-bagian relay elektromekanis dapat dilihat pada gambar 2.11.
Gambar 2.11. Bagian-bagian Relay Elektromekanis[21]
Coil adalah gulungan kawat yang dialiri arus listrik untuk menghasilkan energi.
pada coil. Terdapat dua jenis contact yaitu normally opened contact dan normally closed
contact. Normally opened contact adalah kondisi dimana terminal relay elektromekanis
berada pada keadaan terbuka atau tidak terhubung sebelum coil dialiri arus listrik.
Normally closed contact adalah kondisi dimana terminal relay elektromekanis berada pada
keadaan tertutup atau terhubung sebelum coil dialiri arus listrik.
2.10.
Transistor BJT Sebagai Saklar[20]
Transistor BJT adalah perangkat semikonduktor yang terdiri dari tiga lapis bahan
tipe-p dan tipe-n yaitu N-P-N atau P-N-P.
Gambar 2.12. Konfigurasi Common Emitter[20]
Penelitian ini menggunakan transistor dengan tipe N-P-N. Transistor N-P-N dapat
difungsikan sebagai saklar dengan memanfaatkan kondisi saturasi dan cut-off pada
konfigurasi common emitter sepeti yang ditunjukan gambar 2.12.
Arus kolektor pada terminal transistor N-P-N yang ditunjukan gambar 2.12 dapat
dihitung menggunakan persamaan 2.15.
IC = IB . β (2.15)
Keterangan:
IC = Arus terminal kolektor (mA)
Transistor N-P-N berada pada kondisi cut-off jika tidak ada arus yang mengalir
melewati terminal basis. Arus basis dan arus kolektor dapat dihitung dengan persamaan
2.16 dan 2.17.
IB = -
(2.16)
IC = -
(2.17)
Keterangan:
VBB = Tegangan catu basis (volt)
VBE = Tegangan basis-emiter transistor (volt)
VCC = Tegangan catu kolektor (volt)
RB = Hambatan basis (ohm)
RC = Hambatan kolektor (ohm)
Karakteristik keluaran transistor N-P-N dan garis beban transistor N-P-N ditunjukan
pada gambar 2.13
Gambar 2.13. Garis Beban DC Transistor N-P-N[20]
Jika transistor N-P-N berada pada kondisi saturasi maka perubahan arus basis tidak
mempengaruhi arus kolektor. Arus kolektor pada kondisi ini dapat dihitung dengan
(2.18) Jika transistor berada pada daerah saturasi maka tegangan VCE menjadi sangat kecil dan
24
BAB III
PERANCANGAN PENELITIAN
3.1.
Arsitektur Sistem
Sistem pengukuran konduktivitas air kolam ikan dibagi menjadi bagian pengukuran
dan bagian komunikasi. Bagian pengukuran dan bagian komunikasi terdiri dari beberapa
subsistem seperti pada gambar 3.1.
Gambar 3.1. Blok Diagram Sistem Pengukuran Konduktivitas Air Kolam Ikan
Pada bagian pengukuran, LCD menampilkan informasi kepada user. Informasi
yang ditampilkan adalah nilai konduktivitas hasil pengukuran. Sistem pengukuran
konduktivitas air kolam ikan memiliki empat sensor konduktivitas dengan nilai konstanta
sel 1cm-1, 2cm-1, 5cm-1 dan 10cm-1. Pilihan sensor konduktivitas yang ingin digunakan
dapat dimasukan lewat tombol tekan. ADC-0 sampai dengan ADC-3 pada ATMega32
mengubah tegangan keluaran sensor konduktivitas menjadi data digital, sedangkan ADC-4
digunakan untuk mengubah tegangan keluaran sensor suhu. ATMega32 menggunakan
tegangan dari sensor konduktivitas dan sensor suhu untuk menghitung nilai konduktivitas
air kolam ikan. Nilai konduktivitas juga dikemas menjadi paket data.
Pada bagian komunikasi, RS-485 menghubungkan ATMega32 dengan sistem
akuisisi data dan sistem kontrol. ATMega32 mengirimkan paket data secara serial lewat
pin Tx-Rx ke sistem akuisisi data dan sistem kontrol. Nilai konduktivitas diukur dan
dikirim setelah sistem menerima perintah dari sistem akuisisi data.
SISTEM PENGUKURAN KONDUKTIVITAS AIR KOLAM IKAN
Bagian Pengukuran Bagian Komunikasi
3.2.
Perancangan Sensor Konduktivitas
Sensor konduktivitas pada sistem pengukuran konduktivitas air kolam ikan
menggunakan dua elektroda yang dibuat dari stainless steel setebal 1mm, sedangkan
kerangka sensor konduktivitas dibuat dari bahan acrylic dengan tebal 2mm.
3.2.1.
Perancangan Konstanta Sel
Terdapat empat sensor konduktivitas dengan nilai konstanta sel 1cm-1, 2cm-1, 5cm-1
dan 10cm-1. Ukuran konstanta sel sensor konduktivitas dirancang berdasarkan persamaan
2.1.
a. KC = 1cm-1 dan ditetapkan A = 1cm2, dengan menggunakan persamaan 2.1
diperoleh d = 1cm. Luas area elektroda sebesar 1cm2 diperoleh dengan ketentuan
panjang elektroda adalah 1cm dan lebar elektroda adalah 1cm seperti pada gambar
3.2.
Gambar 3.2. Elektroda dengan KC = 1cm-1
b. KC = 2cm-1 dan ditetapkan A = 1cm2, dengan menggunakan persamaan 2.1
diperoleh d = 2cm. Luas area elektroda sebesar 1cm2 diperoleh dengan ketentuan
panjang elektroda adalah 1cm dan lebar elektroda adalah 1cm seperti pada gambar
3.3.
Gambar 3.3. Elektroda dengan KC = 2cm-1
1cm
1cm
2cm
1cm
1cm
c. KC = 5cm-1 dan ditetapkan A = 1cm2, dengan menggunakan persamaan 2.1
diperoleh d = 5cm. Luas area elektroda sebesar 1cm2 diperoleh dengan ketentuan
panjang elektroda adalah 1cm dan lebar elektroda adalah 1cm seperti pada gambar
3.4.
Gambar 3.4. Elektroda dengan KC = 5cm-1
d. KC = 10cm-1 dan ditetapkan A = 1cm2, dengan menggunakan persamaan 2.1
diperoleh d = 10cm. Luas area elektroda sebesar 1cm2 diperoleh dengan ketentuan
panjang elektroda adalah 1cm dan lebar elektroda adalah 1cm seperti pada gambar
3.5.
Gambar 3.5. Elektroda dengan KC = 10cm-1
3.2.2.
Perancangan Rangkaian Sensor Konduktivitas
Sensor konduktivitas menggunakan catu daya DC (Vs) untuk eksitasi elektroda dan
sebuah resistor (Rs) yang diserikan dengan sensor konduktivitas seperti pada gambar 3.6.
Tegangan sumber Vs ditentukan sama dengan tegangan suplai ATMega32 yaitu 5 volt.
Resistor Rs untuk setiap konstanta sel memiliki nilai yang berbeda-beda. Besar Rs pada
konstanta sel 1cm-1 adalah 100 ohm, Rs pada konstanta sel 2cm-1 adalah 200 ohm, Rs pada
konstanta sel 5cm-1 adalah 500 ohm dan Rs pada konstanta sel 10cm-1 adalah 1000 ohm.
Resistor Rs memiliki dua fungsi. Pertama, Rs digunakan untuk menglinierkan nilai
tegangan keluaran sensor konduktivitas terhadap nilai konduktivitas hasil perhitungan. 1cm
10cm
1cm 1cm
5cm
Kedua, Rs digunakan untuk membatasi nilai keluaran sensor konduktivitas. Keluaran
sensor konduktivitas dihubungkan dengan ADC-0 untuk konstanta sel 1cm-1 sampai
dengan ADC-3 untuk konstanta sel 10cm-1.
Gambar 3.6. Rangkaian Sensor Konduktivitas
3.3.
Perancangan Sensor LM35
Sensor LM35 digunakan untuk mengukur suhu air. Sensor LM35 memiliki tiga pin
seperti pada gambar 3.7.
Gambar 3.7. Skema Rangkaian Sensor LM35
Pin satu sensor LM35 dihubungkan dengan catu daya 5 volt. Pin dua sensor LM35
dihubungkan dengan ADC-4 ATMega32, sehingga tegangan keluaran sensor LM35 dapat
dikonversi menjadi data digital. Data digital digunakan untuk menghitung nilai suhu air
yang terukur oleh sensor LM35. Pin tiga Sensor LM35 dihubungkan dengan titik ground. 1
2
3 5 volt
ADC-4
Ground
Vs = 5 volt
3.4.
Perancangan Catu Daya 5 Volt
Rangkaian catu daya berfungsi untuk menghasilkan tegangan DC konstan sebesar 5
volt dengan menggunakan IC LM7805. IC LM7805 mendapat masukan tegangan dari
keluaran transformator yang telah disearahkan menggunakan dioda dan kapasitor sebagai
filter. Rangkaian catu daya 5 volt ditunjukan pada gambar 3.8.
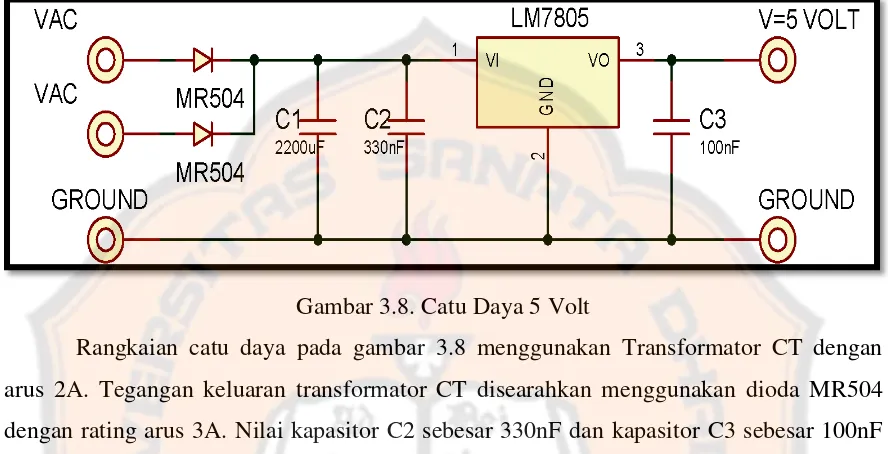
Gambar 3.8. Catu Daya 5 Volt
Rangkaian catu daya pada gambar 3.8 menggunakan Transformator CT dengan
arus 2A. Tegangan keluaran transformator CT disearahkan menggunakan dioda MR504
dengan rating arus 3A. Nilai kapasitor C2 sebesar 330nF dan kapasitor C3 sebesar 100nF
disesuaikan dengan datasheet IC LM7805. Nilai kapasitor C1 sebagai filter dapat dihitung
menggunakan persamaan 2.11, 2.12, 2.13 dan 2.14.
VAC pada gambar 3.8 merupakan tegangan AC sebesar 9 volt yang bersumber dari
transformator CT. Nilai VAC disubtitusi ke persamaan 2.14 sehingga diperoleh Vm sebesar
11,328 volt. Jika nilai Vm disubtitusi ke persamaan 2.13, dengan Vmin berdasarkan tabel
2.12 sebesar 7,3 volt maka diperoleh nilai Vr(p-p) sebesar 4,028 volt. Nilai Vr(p-p)
disubtitusi ke persamaan 2.12 sehingga diperoleh Vr(rms) sebesar 2,325 volt. Nilai
kapasitor C1 dihitung menggunakan persamaan 2.11, jika frekuensi yang digunakan
adalah 50Hz dengan Idc sebesar 2A dan Vr(rms) sebesar 2,325 volt maka diperoleh C1
sebesar 2069µF. Rangkaian catu daya 5 volt menggunakan kapasitor C1 dengan nilai
2200µF karena nilai kapasitor sebesar 2069µF tidak terdapat dipasaran.
Sistem pengukuran konduktivitas air kolam ikan menggunakan tiga catu daya 5
volt. Semua rangkaian catu daya menggunakan konfigurasi rangkaian dan nilai komponen
yang sama seperti pada gambar 3.8. Perbedaan antara ketiga rangkaian catu daya tersebut
adalah setiap rangkaian mencatu jenis beban yang berbeda-beda. Rangkaian catu daya satu
mencatu minimum sistem dan rangkaian sensor. Rangkian catu daya dua mencatu
3.5.
Perancangan Minimum Sistem
Minimum sistem merupakan pusat kontrol dan pengolahan data pada sistem
pengukuran konduktivitas air kolam ikan. Rangkaian minimum sistem terdiri dari
ATMega32 sebagai komponen utama, rangkaian clock eksternal, rangkaian reset dan
RS-485. Rangkaian ATMega32 dapat dilihat pada gambar 3.9.
Gambar 3.9. Rangkaian ATMega32
Konfigurasi penggunaan port ATMega32 dapat dilihat pada tabel 3.1.
Tabel 3.1. Fungsi Port ATMega32
Port Pin Fungsi
A
0 ADC konstanta sel 1cm-1 1 ADC konstanta sel 2cm-1 2 ADC konstanta sel 5cm-1 3 ADC konstanta sel 10cm-1 4 ADC suhu (dari LM35)
B
0 Keluaran RS LCD
1 Keluaran RW LCD
2 Keluaran E LCD
Tabel 3.1. (Lanjutan) Fungsi Port ATMega32
Port Pin Fungsi
C
0 Masukan tombol pilih konstanta sel 1cm-1 1 Masukan tombol pilih konstanta sel 2cm-1 2 Masukan tombol pilih konstanta sel 5cm-1 3 Masukan tombol pilih konstanta sel 10cm-1 4 Masukan tombol next
5 Masukan tombol back
D
0 Penerima data (serial komunikasi dengan akuisisi data) 1 Pengirim data (serial komunikasi dengan akuisisi data) 2 Kontrol pin RE/DE RS-485
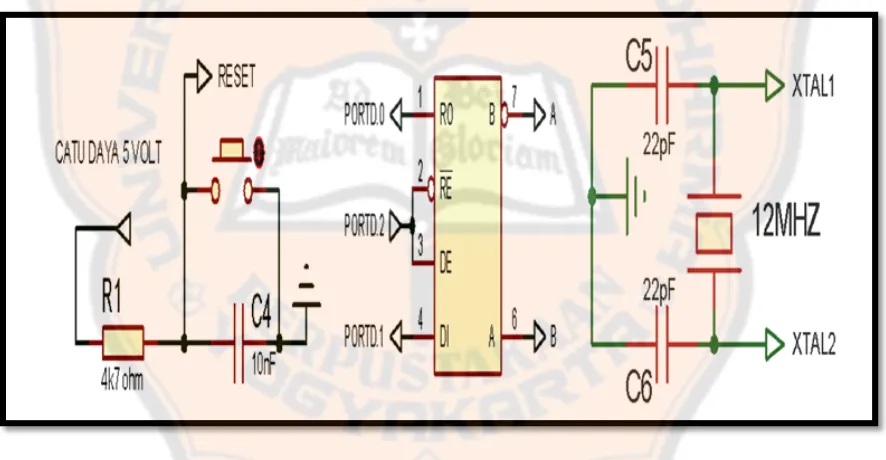
Rangkaian clock eksternal terdiri dari kapasitor C5, kapasitor C6 dan kristal
12MHz seperti pada gambar 3.10. Nilai kapasitor C5 dan C6 sesuai dengan datasheet
ATMega32 sebesar 22pF. Rangkaian clock eksternal berfungsi menghasilkan gelombang
dengan frekuensi sebesar 12MHz. Gelombang ini berfungsi sebagai clock ATMega32.
Gambar 3.10. Rangkaian Clock Eksternal, Rangkaian Reset dan RS-485
Rangkaian reset terdiri dari resistor R1 sebesar 4k7Ohm, kapasitor C4 sebesar 10nF
dan tombol tekan seperti pada gambar 3.10. Rangkaian reset berfungsi sebagai low filter
saat push button off, sedangkan saat push button on rangkaian reset mengalirkan arus ke
pin reset lewat resistor R1. RS-485 berfungsi sebagai jalur komunikasi antara minimum
sistem pengukuran konduktivitas air kolam ikan dan sistem akuisisi data. RS-485
melewatkan data dari sistem akuisisi data ke pin Tx-Rx pada portd.0 dan portd.1
ATMega32. Pin RE dan DE pada RS-485 berfungsi sebagai pengontrol mode komunikasi
3.6.
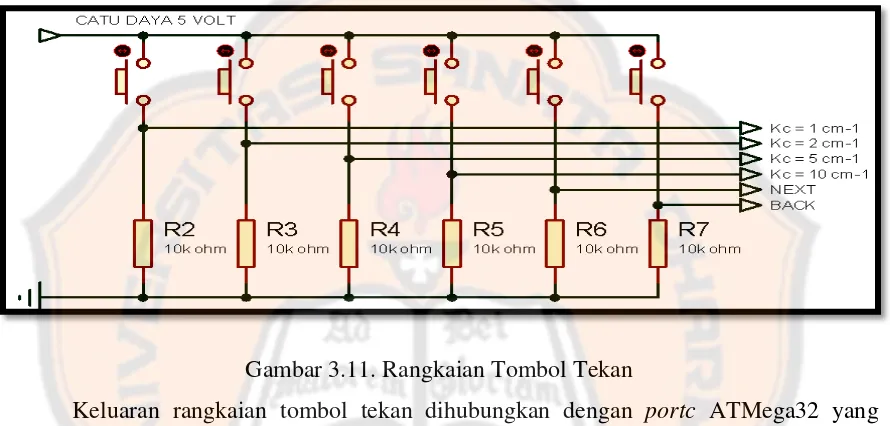
Perancangan Rangkaian Tombol Tekan
Rangkaian tombol tekan berfungsi memasukan pilihan nilai konstanta sel sensor
konduktivitas yang digunakan oleh user ke ATMega32. Rangkaian tombol tekan terdiri
dari enam resistor pull-up dan enam tombol tekan. Resistor pull-up memiliki besar 10k
ohm. Resistor pull-upberfungsi untuk memberikan logika “tinggi” pada portc ATMega32 saat tombol ditekan. Saat tombol tidak ditekan maka portc ATMega32 mendapat logika
“rendah”. Nilai resistor pull-up dirancang berdasarkan datasheet ATMega32.
Gambar 3.11. Rangkaian Tombol Tekan
Keluaran rangkaian tombol tekan dihubungkan dengan portc ATMega32 yang
berfungsi sebagai port input. Tombol tekan terdiri dari dua jenis tombol yaitu tombol menu
dan tombol select untuk memilih nilai konstanta sel. Tombol menu terdiri dari tombol next
dan tombol back. Tombol next berfungsi untuk melanjutkan proses sedangkan tombol back
untuk kembali ke menu sebelumnya. Tombol ini berguna saat user melakukan penggantian
nilai konstanta sel. Tombol select terdiri dari empat tombol untuk memilih nilai konstanta
sel yaitu 1cm-1, 2cm-1, 5cm-1 dan 10cm-1.
3.7.
Perancangan Rangkaian LCD 16x2
Rangkaian LCD 16x2 seperti pada gambar 3.12 berfungsi untuk menampilkan
informasi dari ATMega32 kepada user. Rangkaian LCD 16x2 terhubung dengan portb
pada ATMega32. LCD 16x2 menerima catu 5 volt lewat pin VDD, sedangkan pin VSS
pada LCD 16x2 dihubungkan dengan ground. Pengaturan kontras pada LCD 16x2
dilakukan lewat pin VEE. Pin VEE mendapatkan masukan berupa tegangan dari 0 volt
sampai 5 volt untuk mengatur tingkat kontras LCD 16x2. Potensio 5k ohm pada rangkaian
Gambar 3.12. Rangkaian LCD 16x2
3.8.
Perancangan Program
Program ATMega32 dibuat menggunakan bahasa C dan di-compile dalam bentuk
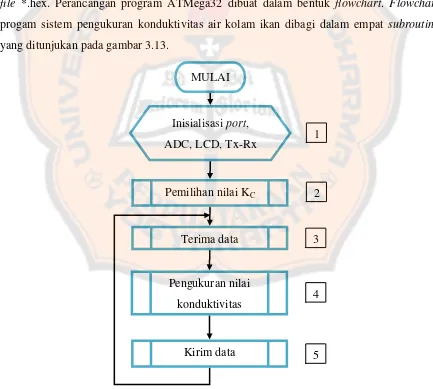
file *.hex. Perancangan program ATMega32 dibuat dalam bentuk flowchart. Flowchart
progam sistem pengukuran konduktivitas air kolam ikan dibagi dalam empat subroutine
yang ditunjukan pada gambar 3.13.
Gambar 3.13. Flowchart Progam Sistem Pengukuran Konduktivitas Air Kolam Ikan MULAI
Pemilihan nilai KC
Pengukuran nilai
konduktivitas
1
2
3 Inisialisasi port,
ADC, LCD, Tx-Rx
Terima data
Kirim data
4
1. Program melakukan inisialisasi pada port, ADC, LCD, terminal Tx dan Rx
ATMega32.
2. Subroutine ini berisikan program untuk menentukan nilai konstanta sel.
3. Subroutine ini berisikan program penerimaan data dari sistem akuisisi data.
4. Subroutine ini berisikan program pengukuran nilai konduktivitas.
5. Subroutine ini berisikan program pengiriman data ke sistem akuisisi data
3.8.1.
Flowchart Subroutine Pemilihan Nilai Konstanta Sel
User menentukan nilai konstanta sel pada program dengan menekan salah satu dari
empat tombol tekan yang merepresentasikan nilai konstanta sel. ATMega32 merespon
masukan user berdasarkan flowchart subroutine pemilihan nilai konstanta sel. Setelah
memilih nilai konstanta sel user harus menekan tombol next untuk melanjutkan ke mode
berikutnya.
Gambar 3.14. Flowchart Subroutine Pemilihan Nilai Konstanta Sel MULAI
Tampil “ Pilih Sensor”
Portc.0
= 1
Ambil data portc
Portc.1
= 1
Portc.2
= 1
Portc.3
= 1
KC = 1 KC = 2 KC = 5 KC = 10
A
Tidak Tidak Tidak Tidak
Gambar 3.14.(Lanjutan) Flowchart Subroutine Pemilihan Nilai Konstanta Sel
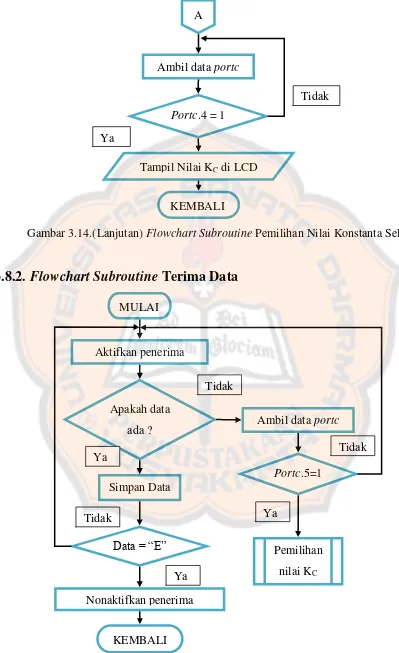
3.8.2.
Flowchart Subroutine Terima Data
Gambar 3.15. Flowchart Subroutine Terima Data MULAI
Aktifkan penerima
Apakah data
ada ?
Simpan Data
Nonaktifkan penerima
KEMBALI
Portc.5=1
Pemilihan
nilai KC
Data = “E”
Tidak
Tidak
Tidak Ya
Ya
Ya
Ambil data portc
A
Tampil Nilai KC di LCD Portc.4 = 1
KEMBALI Ya
Ambil data portc
Bagian penerima pada sistem diaktifkan melalui dua tahap. Pertama, memberikan
logika rendah pada portd.2 ATMega32 sehingga RS-485 beralih ke mode penerima.
Kedua, mengaktifan register penerima ATMega32 dengan memberikan nilai satu pada
register RXEN. Jika penerima aktif maka ATMega32 kemudian memeriksa data yang
diterima lewat register RXC. Jika terdapat data pada bagian penerima maka register RXC
bernilai satu. Jika tidak ada data maka RXC bernilai nol, pada fase ini user masih dapat
melakukan penggantian nilai konstanta sel dengan menekan tombol back. Jika user
menekan tombol back maka ATMega32 kembali ke subroutine pemilihan nilai konstanta
sel. Jika ada data yang diterima maka ATMega32 menyalin data yang masih tersimpan
dalam register UDR ke variabel “Data_terima”. Jika data pada variabel “Data_terima”
bukan karakter “E” maka ATMega32 kembali lagi ke proses penerimaan data, namun jika data tersebut adalah karakter “E” maka proses dilanjutkan. Setelah menerima informasi, ATMega32 mengnonaktifkan register penerima dengan cara memberikan nilai nol pada
register RXEN dan melanjutkan ke subroutine berikutnya.
3.8.3.
Flowchart Subroutine Pengukuran Nilai Konduktivitas
Flowchart ini terdiri dari dua subroutine yaitu konversi ADC-0 sampai ADC-4 dan
hitung nilai konduktivitas. Flowchart subroutine pengukuran nilai konduktivitas dapat
dilihat pada gambar 3.16.
Gambar 3.16. Flowchart Subroutine Pengukuran Nilai Konduktivitas MULAI
Konversi ADC 0 - 4
Hitung nilai
konduktivitas
KEMBALI
Ubah nilai konduktivitas
ATMega32 menggunakan persamaan 2.10 untuk mengubah data digital dari sensor
konduktivitas menjadi nilai tegangan sensor konduktivitas. ATMega32 menghitung nilai
konduktivitas menggunakan nilai tegangan tersebut. Nilai konduktivitas dikemas dalam
paket data dengan menambahkan header berupa karakter “O” dan tail berupa karakter “#”.
Karakter “O” pada paket data menandakan bahwa data berasal dari sistem pengukuran konduktivitas air kolam ikan. Karakter “#” berguna sebagai sebagai kode pengakhir paket data.
a. Subroutine Konversi ADC
Konversi data digital sensor suhu dan sensor konduktivitas menjadi nilai tegangan
didasarkan pada persaman 2.10. Konversi suhu harus dikalikan dengan 100 karena
tegangan yang terbaca pada ADC adalah perkalian 10m volt dengan suhu seperti pada
persamaan 2.8.
Gambar 3.17. Flowchart Subroutine Konversi ADC MULAI
KC=1
Rs = 100
KC=2 KC=5 KC=10
Rs = 200 Rs = 500 Rs = 1000
KEMBALI
Ya Ya Ya Ya
Tidak Tidak Tidak


![Tabel 2.10. Mode Paritas[18]](https://thumb-ap.123doks.com/thumbv2/123dok/1756802.2090855/35.595.91.529.127.523/tabel-mode-paritas.webp)