i
ROBOT PENGANTAR SURAT BERBASIS
MIKROKONTROLER AT89S51
Diajukan untuk memenuhi salah satu syarat memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro Jurusan Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
disusun oleh :
ADI SAPUTRA
NIM : 055114005
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
POSTMAN ROBOT USING AT89S51
MICROCONTROLLER
In Partial Fullfilment of the requirements for the degree of Sarjana Teknik Electrical Engineering Study Program
Electrical Engineering Department
Science and Technology Faculty Sanata Dharma University
ADI SAPUTRA
NIM : 055114005
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
v
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : Adi Saputra
NIM : 055114005
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul :
Robot Pengantar Surat Berbasis Mikorokontroler AT89S51 (Postman Robot
Using AT89S51 Microcontroller).
Dengan demikian saya memberikan kepada Perpustakaan Universitas Sanata Dharma
hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk
pangkalan data, mendistribusikan secara terbatas dan mempublikasikannya di internet atau
media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun
memberikan royalti kepada saya selama tetap mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Dibuat di Yogyakarta
Pada tanggal : 17 Agustus 2009
Yang menyatakan
vi
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akhir ini tidak memuat karya
atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar pustaka
sebagaimana layaknya karya ilmiah.
Yogyakarta, 17 Agustus 2009
vii
Dalam kehidupan sehari – hari banyak ditemui kekurangan dalam proses penyampaian surat dalam suatu perusahaan atau universitas. Dari kekurangan tersebut maka dibuatlah suatu robot untuk mengatasinya. Dengan mikrokontroler sebagai ”otak”-nya dan prinsip line follower sebagai sistem pergerakkannya, dibuatlah robot pengantar surat otomatis.
Sensor Jalur pada robot dirancang untuk mendeteksi garis (line) dan akan memberi masukan pada mikrokontroler untuk menentukan arah gerak robot dengan cara mengubah kecepatan gerak roda kiri dan kanan. Lengan mekanik berfungsi untuk mengambil dan meletakkan surat. Aktuator untuk menggerakkan roda dan lengan mekanik pada robot menggunakan motor DC. Sensor surat pada robot untuk mendeteksi ada atau tidaknya surat di dalam loker.
Hasil pengamatan menunjukan bahwa robot bekerja cukup baik. Robot akan bekerja semakin cepat jika lintasan yang dilalui tidak banyak tikungan. Selain itu robot juga akan bekerja semakin baik jika menggunakan catudaya dengan kemampuan daya yang besar.
Kata kunci : Robot, mikrokontroler, Line Follower, motor DC.
viii
In daily live, there are so many weakness on letter delivering process at company or university. From that weakness then a robot will be made to solve that problem. With microcontroller as the “brain” and line follower’s principle as moving system then postman robot delivery will be made.
Line sensors on robot are designed for detect the line and will give an input to microcontroller to decide robot movement direction with changing the movement speed on the left and right wheel. Mechanical arm’s function is to take and to put a letter. DC Motor used as Actuator to move the wheel and the mechanical arm. Robot’s letter sensor will detect if there is a letter or not in the locker.
Observation result show that the robot’s work was good enough. Robot’s work faster if the circuit that it through has less turn. Beside that, the robot also will work better if the power supply is used with big power capacity.
ix
Puji dan syukur kepada Tuhan Yesus Kristus atas karunia dan bimbingan-Nya
sehingga Penulis dapat menyelesaikan perancangan Tugas Akhir “ Robot Pengantar Surat
Berbasis Mikrokontroler AT89S51” beserta penulisan laporan ini.
Tugas Akhir ini dibuat sebagai salah satu syarat untuk meraih gelar Sarjana Strata 1
(S1) pada jurusan Teknik Elektro Fakultas Sains dan Teknologi Universitas Sanata Dharma
Yogyakarta.
Berkat dukungan dari banyak pihak, Penulis dapat menyelesaikan Tugas Akhir ini
dengan baik. Dan dengan tulus hati, Penulis menyampaikan terima kasih yang sebesar –
besarnya kepada pihak yang telah membantu demi lancarnya penyelesaian Tugas Akhir ini :
1. Bapak Martanto, S.T., M.T., selaku Pembimbing I yang telah memberikan
bimbingan dan arahan kepada Penulis dari awal hingga Tugas Akhir ini selesai.
2. Keluarga, yang telah memberikan dukungan moral dan ekonomi sehingga Tugas
Akhir ini dapat selesai.
3. Bapak Damar Widjaja, S.T., M.T., selaku Pembimbing Akademik yang telah
membantu dan memberi arahan dari awal hingga akhir masa kuliah.
4. Johfines Wijaya, yang telah membantu, dan mendukung hingga terselesaikannya
Tugas Akhir ini.
5. Rekan – rekan Teknik Elektro Angkatan 2005, terimakasih atas kebersamaan,
dukungan, dan bantuannya sehingga masa kuliah menjadi kenangan yang indah dan
menyenangkan.
6. Rekan – rekan satu kontrakan, Charli Liando Saputra, Silverius Yonan Saga,
x duka.
7. Para dosen, laboran, dan staf administrasi jurusan Teknik Elektro Universitas Sanata
Dharma dan semua pihak yang selama ini secara tidak langsung telah banyak
membantu Penulis.
Penulis menyadari sepenuhnya akan keterbatasan, kekurangan, dan kelemahan yang
menjadikan Tugas Akhir ini masih jauh dari kesempurnaan. Penulis mengharapkan adanya
kritik dan saran dari para Pembaca, dan dengan senang hati Penulis akan menerimanya.
Kiranya demikianlah beberapa hal yang ingin Penulis sampaikan, dengan harapan
semoga bermanfaat bagi Pembaca semuanya.
Yogyakarta, 10 Juli 2009
xi
Halaman Sampul (Bahasa Indonesia) ………... i
Halaman Sampul (Bahasa Inggris) ………... ii
Halaman Persetujuan ………... iii
Halaman Pengesahan ... ……... iv
Lembar Persetujuan Publikasi Karya Ilmiah ... v
Pernyataan Keaslian Karya ………... vi
Intisari ………... vii
Abstract ………. viii
Kata Pengantar ………... ix
Daftar Isi ………... xi
Daftar Gambar ……….. xv
Daftar Tabel ……….. xviii
BAB I : PENDAHULUAN 1.1Judul ……… 1
1.2Latar Belakang ……… 1
1.3Tujuan dan Manfaat ……… 2
1.4Batasan Masalah ………. 3
1.5Metodologi Penelitian ………. 3
BAB II : DASAR TEORI 2.1 Robotika ……….. 5
2.1.1 Sistem Robot dan Orientasi fungsinya ………... 5
2.1.2 Sistem Kontrol Dasar Robot ……… 7
xii
2.2.2 Organisasi Memori AT89S51 ………... 8
2.2.2.1 Memori Data ………. 8
2.2.2.1.1 RAM Internal ………. 9
2.2.2.1.2 SFR (Special Function Register) ………... 10
2.2.3 Pewaktu / Pencacah (Timer / Counter) ……… 13
2.2.3.1 TMOD ………... 13
2.2.3.2 TCON ……… 14
2.2.4 Mode Timer ………..15
2.2.5 Rangkaian Oscillator ………... 16
2.2.6 Mekanisme Reset ………...16
2.3 Light – Dependent Resistor (LDR) ………. 17
2.4 Fotodioda (Photodiode) ……….. 18
2.5 Light Emitting Diode (LED) ………... 18
2.5.1 Tegangan dan Arus LED ………. 19
2.6 Optocoupler ……….20
2.7 Pembagi Tegangan ……….. 21
2.8 Saklar Batas (Limit Switch) ………. 22
2.9 Konparator ……….. 22
2.10 Voltage buffer (Penyangga tegangan) ………... 23
2.11 Aktuator Menggunakan Motor DC ………... 24
2.12 IC Driver L293 ………. 26
xiii
3.2.1 Sensor Pendeteksi Jalur Hitam ……… 30
3.2.2 Sensor Sensitivitas Cahaya Luar ……….. 33
3.3 Alur Perancangan Lengan Mekanik ………34
3.4 Perancangan Loker Surat / Kotak Surat ……….. 38
3.5 Perancangan Motor DC Sebagai Aktuator ……….. 42
3.6 Mikrokontroler AT89S51 ………... 43
3.7 Perancangan Daya dan Berat ……….. 45
3.7.1 Perhitungan Daya ………. 45
3.7.2 Pengukuran Berat ………. 48
3.8 Perangkat Lunak (Software) ………... 50
3.8.1 Diagram Alir Program Utama ……….. 50
3.8.2 Subrutin Proses Pengambilan Surat ………. 53
3.8.3 Subrutin Proses Peletakan Surat ……….. 54
BAB IV : HASIL DAN PEMBAHASAN 4.1 Pengujian Robot ……….. 55
4.1.1 Uji Keberhasilan Mengambil Surat ………. 56
4.1.2 Uji Keberhasilan Mengantar Surat ………... 58
4.1.3 Uji Kecepatan Robot ……… 60
4.1.4 Konsumsi Arus dan Daya ……… 61
4.2 Pengujian Rangkaian Sensor Pendeteksi Jalur Hitam ... 63
4.3 Pengujian Rangkaian Sensor Tegangan Referensi ... 67
4.4 Pengujian Rangkaian Sensor Indikator Surat ... 69
xiv
4.6.1 Subrutin Proses Jalan ... 72
4.6.1 Subrutin Persimpangan ... 73
4.6.1 Subrutin Proses Ambil Surat ... 75
4.6.1 Subrutin Proses Peletakan Surat ... 75
4.6.1 Subrutin Proses Pulang ... 76
BAB V : KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 78
5.2 Saran ... 78
DAFTAR PUSTAKA ... ... 80
xv
Halaman
Gambar 2.1 Peta Memory RAM ………... 9
Gambar 2.2 Special functions Register (SFR) ……….. 11
Gambar 2.3 Program Status Word (PSW) ……… 12
Gambar 2.4 Register – Register pada TMOD ………... 13
Gambar 2.5 Register – Register pada TCON ………... 14
Gambar 2.6 Rangkaian Oscillator ………16
Gambar 2.7 Rangkaian Reset ………16
Gambar 2.8 Simbol Rangkaian LDR ……… 17
Gambar 2.9 Karakteristik LDR ………. 17
Gambar 2.10 Simbol Rangkaian Fotodioda ……….. 18
Gambar 2.11 Simbol LED ……… 19
Gambar 2.12 Rangkaian LED ………. ……… 19
Gambar 2.13 Rangkaian Optocoupler ……….. 20
Gambar 2.14 Rangkaian Tiga Resistor Terhubung Seri ………... 21
Gambar 2.15 Kondisi Limit Switch NO dan Kondisi Limit Switch NC ... 22
Gambar 2.16 Op-amp Komparator dan Karakteristik Tegangan Output (Vo) ... 23
Gambar 2.17 Grafik Vout dan Vin Yang Sudah Dibandingkan Dengan Vref ... 23
Gambar 2.18 Rangkaian Buffer Tegangan ……… 24
Gambar 2.19 Kontrol Motor DC Menggunakan Jembatan H ... 25
Gambar 2.20 Pulse-Width Modulation ………. 26
xvi
Gambar 3.2 Desain Jadi Robot Pengantar Surat ... 29
Gambar 3.3 Diagram Sistem Sensor Jalur Secara Umum ... 30
Gambar 3.4 Desain Sensor Jalur Bagian Depan ... 31
Gambar 3.5 Rangkaian Sensor Jalur Hasil Perancangan ... 32
Gambar 3.6 Level Tegangan Fotodioda Saat Rd 3k Ohm ... 33
Gambar 3.7 Rangkaian Pendeteksi Cahaya Luar / Pengatur Sensitivitas ... 34
Gambar 3.8 Lengan Mekanik dan Pergerakannya ... 35
Gambar 3.9 Proses Pengambilan Surat ………. 36
Gambar 3.10 Proses Peletakan Surat ... 37
Gambar 3.11 Rancangan Segitiga Penahan ... 38
Gambar 3.12 Perancangan Lintasan dan Ukuran Loker ... 39
Gambar 3.13 Skematik LED Indikator ………. 39
Gambar 3.14 Rancangan Skematik Rangkaian Penerima ... 41
Gambar 3.15 Rancangan Perangkat Keras Penerima ... 41
Gambar 3.16 Karakteristik Tegangan Keluaran LDR ……….. 41
Gambar 3.17 Rangkaian Skematik Untuk Penggerak Roda Kiri dan Kanan ... 43
Gambar 3.18 Rangkaian Skematik Untuk Penggerak Lengan Mekanik / Slider ... 43
Gambar 3.19 Port I/O AT89S51 dan Fungsinya ... 44
Gambar 3.20 Rangkaian Reset dan Rangkaian Oscillator ... 45
Gambar 3.21 Desain 3D Berdasarkan Berat Alat ... 49
Gambar 3.22 Diagram Alir Perangkat Lunak Robot ... 50
Gambar 3.23 Diagram Alir Subrutin Proses Pengambilan Surat ... 53
xvii
Gambar 4.2 Posisi Loker yang Benar (Kiri) dan Salah (Kanan) ... 58
Gambar 4.3 Posisi Lengan Mekanik yang Benar (Kiri) dan Salah (Kanan) ... 58
Gambar 4.4 Robot Saat Akan Meletakkan Surat ... 59
Gambar 4.5 Lintasan yang Digunakan ...60
Gambar 4.6 Metode Pengukuran Arus ………..62
Gambar 4.7 Hardware Sensor Pendeteksi Jalur Hitam ... 64
Gambar 4.8 Skematik Rangkaian Sensor Pendeteksi Jalur Hitam Satu Sisi ... 64
Gambar 4.9 Hardware Sensor Tegangan Referensi ... 68
Gambar 4.10 Hardware Rangkaian Sensor Indikator Surat ... 69
Gambar 4.11 Subrutin Waktu Tunda ……… 70
Gambar 4.12 Penggalan Program untuk Menentukan Kepala Robot ...……….. 72
Gambar 4.13 Subrutin Proses Jalan ..……… 72
Gambar 4.14 Subrutin Persimpangan ...……… 74
Gambar 4.15 Robot Melewati Loker ……… 74
Gambar 4.16 Robot Bergerak ke arah Loker ……… 74
Gambar 4.17 Subrutin Proses Ambil Surat ...……… 75
Gambar 4.18 Subrutin Proses Peletakan Surat ..………... 75
Gambar 4.19 Robot Melakukan Proses Peletakan Surat ...……… 76
xviii
Halaman
Tabel 2.1 Mode Pencacah / Waktu ………... 15
Tabel 3.1 Karakteristik Fotodioda Hasil Pra Penelitian ... 32
Tabel 3.2 Karaktersistik LDR ………... 33
Tabel 3.3 Kondisi Limit Switch ...35
Tabel 3.4 Data Pra Penelitian Untuk Karakteristik LDR yang Ditutup Pipa ... 40
Tabel 3.5 Kondisi Kecepatan Roda Berdasarkan Sensor ………. 42
Tabel 3.6 Besar Daya Hasil Perhitungan Teoritis ... 47
Tabel 3.7 Berat Masing – Masing Alat ... 48
Tabel 4.1 Data Hasil Pengujian Kinerja Robot ... 56
Tabel 4.2 Data Keberhasilan Dalam Mengambil Surat ... 57
Tabel 4.3Data Keberhasilan Dalam Mengantarkan Surat ... 59
Tabel 4.4 Data Waktu Tempuh Untuk Proses Pengantaran Surat ... 60
Tabel 4.5 Data Kecepatan Robot ... 61
Tabel 4.6 Data Arus dan Daya Total yang Diserap ……….. 62
Tabel 4.7 Perbandingan Data Hasil Pengukuran dan Data Teoritis Pada Sensor Pendeteksi Jalur Hitam Sisi Depan ... 66
Tabel 4.8 Perbandingan Data Hasil Pengukuran dan Data Teoritis Pada Sensor Pendeteksi Jalur Hitam Sisi Belakang ... 67
Tabel 4.9 Data Perbandingan Hasil Pengukuran Dengan Hasil Perancangan Untuk Sensor Tegangan Referensi ...68
xix
BAB I
PENDAHULUAN
1.1.Judul
Robot Pengantar Surat Berbasis Mikrokontroler AT89S51 (Postman Robot Using
AT89S51 Microcontroller).
1.2.Latar Belakang
Dalam kehidupan sehari – hari banyak ditemui kekurangan dalam proses
penyampaian surat pada perusahaan atau universitas, seperti jauhnya tempat loker surat dari
ruang kerja sehingga menimbulkan rasa malas bagi seorang karyawan untuk mengambilnya.
Dari kekurangan tersebut, agar surat tersebut dapat diterima oleh karyawan yang dituju tanpa
perlu mengambil sendiri ke tempat loker surat maka dibuatlah suatu robot untuk
mengatasinya.
Robot yang akan dibuat menggunakan mikrokontroler karena dengan
mikrokontroler, memungkinkan untuk dibuat sebuah piranti elektronik yang dimensi
fisiknya jauh lebih ringkas. Penerapan mikrokontroler saat ini pun sudah sangat luas dan
telah memberi sumbangan yang besar bagi teknologi yang menunjang kehidupan manusia
terbukti dari banyaknya berbagai temuan yang terus dikembangkan untuk menyelesaikan
masalah kehidupan. Salah satunya yang sekarang mulai terkenal dan sering dilombakan
adalah Line Follower ( pengikut garis). Sesuai namanya, Line Follower adalah robot yang
akan bergerak mengikuti jalur yang sudah ditentukan. Dengan mikrokontroler sebagai
”otak”-nya dan prinsip line follower sebagai sistem pergerakkannya dibuatlah robot
Saat diberi catu daya, robot akan berjalan di samping loker. Di depan setiap loker
terdapat persimpangan, dan robot akan mendeteksi persimpangan tersebut. Jika sampai pada
persimpangan, robot akan berhenti dan akan mendeteksi cahaya dari arah loker. Jika robot
mendeteksi cahaya, maka lengan mekanik akan bergerak masuk ke loker dan mengambil
surat di dalam. Setelah surat terambil, robot akan berbelok di persimpangan dan akan
berjalan mengikuti jalur sampai di tempat tujuan, lengan mekanik akan meletakan surat. Jika
pada saat berhenti di persimpangan robot tidak mendeteksi cahaya selama 5 detik, robot
akan menganggap bahwa loker kosong dan akan bergerak lurus melewati persimpangan dan
berhenti di persimpangan berikutnya, begitu seterusnya sampai jalur habis. Jika robot sudah
sampai pada akhir jalur maka robot akan bergerak mundur sampai posisi awal dan akan
mengulangi proses yang sama.
1
.3.Tujuan dan Manfaat
Tujuan dari penelitian ini yaitu membuat robot yang dapat mengirim surat secara
otomatis.
Selama penelitian dalam merancang robot pengantar surat ini, diharapkan dapat diambil
manfaatnya antara lain :
a. Sebagai salah satu contoh penerapan Mikrokontroler dalam perancangan robot.
b. Sebagai acuan untuk perkembangan sistem pengiriman surat agar lebih efisien.
c. Sebagai acuan untuk dapat lebih memahami fungsi dan karakteristik komponen -
kompenen elektronik maupun mekanik yang digunakan dalam perancangan sehingga
1.4.Batasan Masalah
Agar perancangan sistem dan pembahasan laporan tentang robot pengantar surat
berdasarkan line follower berbasis mikrokontroller ini menjadi lebih spesifik maka diberikan
beberapa batasan sebagai berikut:
a. Motor penggerak roda adalah motor DC
b. Sensor cahaya menggunakan LED inframerah, fotodioda, dan LDR (Light Dependent
Resistor) yang kepekaan resistornya dapat diatur melalui resistor variable
(potensiometer).
c. Letak loker harus dekat dengan garis jalur pertama agar robot dapat mendeteksi dan
mengambil surat. Demikian juga lintasan yang akan digunakan tidak ada penghalang dan
panjang lintasan 2 meter.
d. Rangkaian lengan mekanik menggunakan sistem mekanik pada CD-ROM bekas untuk
pergerakan maju – mundur dan untuk sistem ini tidak dibahas dalam laporan
perancangan ini.
e. Jalur yang digunakan berwarna hitam.
f. Surat yang akan diantar berukuran 11 cm x 23 cm.
g. Digunakan rangkaian mikrokontroler Atmel AT89S51 untuk mengendalikan semua
proses yang berlangsung pada robot pengantar surat ini.
I.
5.Metodologi Penelitian
Penulisan skripsi ini menggunakan metode :
1. Studi pustaka, menggunakan buku – buku referensi dan jurnal – jurnal.
2. Perhitungan dan analisa dalam menentukan tegangan referensi untuk kepekaan sensor
3. Perancangan alat yang didasari oleh dasar teori
4. Implementasi hasil perancangan ke bentuk perangkat keras (hardware).
5. Pengujian alat dan mengambil data hasil pengujian dengan menggunakan alat ukur. Hal
– hal yang akan dikur atau diuji adalah:
• Keberhasilan mekanisme pengambil pada lengan robot
• Daya tahan robot
• Kecerdasan robot dalam memilih tempat tujuan
• Kemampuan robot dalam membawa surat
• Kecepatan robot dalam mengirim surat 6. Analisis data yang didapat dari pengujian alat.
BAB II
DASAR TEORI
2.1.Robotika
Keunggulan dalam teknologi robotik tak dapat dipungkiri telah lama dijadikan ikon
kebanggaan negara – negara maju di dunia. Kecanggihan teknologi yang dimiliki, gedung–
gedung tinggi yang mencakar langit, tingkat kesejahteraan rakyatnya yang tinggi,
kota-kotanya yang modern, belumlah terasa lengkap tanpa popularitas kepiawaian dalam dunia
robotika.
Kata robot yang berasal dari bahasa Czech, robota, yang berarti pekerja, mulai
popular ketika seorang penulis berbangsa Czech (Ceko), Karl Capek, membuat pertunjukan
dari lakon komedi yang ditulisnya pada tahun 1921 yang berjudul RUR (Rossum’s Universal
Robot).[1]
2.1.1.Sistem Robot dan Orientasi Fungsinya
1. Sistem kontroler
Adalah rangkaian elektronik yang setidak-tidaknya terdiri dari rangkaian prosesor (CPU,
Memori, komponen interface Input/Output), signal conditioning untuk sensor (analog
dan atau digital), dan driver untuk aktuator. Bila diperlukan bisa dilengkapi dengan
sistem monitor seperti seven segment, LCD (liquid crystal display) ataupun CRT
2. Mekanik robot
Adalah sistem mekanik yang dapat terdiri dari setidak-tidaknya sebuah fungsi gerak.
Jumlah fungsi gerak disebut sebagai derajat kebebasan atau degree of freedom (DOF).
Sebuah sendi yang diwakili oleh sebuah aktuator disebut sebagai satu DOF, sedangkan
derajat kebebasan pada struktur roda dan kaki diukur berdasarkan fungsi holonomic atau
non-holonomic.
3. Sensor
Adalah perangkat atau komponen yang bertugas mendeteksi (hasil) gerakan atau
fenomena lingkungan yang diperlukan oleh sistem kontroler. Dapat dibuat dari sistem
yang paling sederhana seperti sensor ON/OFF menggunakan limit switch, sistem analog,
sistem bus parallel, sistem bus serial, hingga sistem mata kamera.
4. Aktuator
Adalah perangkat elektronik yang menghasilkan daya gerakan. Dapat dibuat dari sistem
motor listrik (Motor DC (permanent magnet, brushless, shunt dan series), motor DC
servo, motor stepper, ultrasonic motor, linear motor, torque motor, solenoid, dsb),
Sistem pneumatik (perangkat kompresi berbasis udara atau gas nitrogen) dan perangkat
hidrolik (berbasis bahan cair seperti oli). Untuk meningkatkan tenaga mekanik aktuator
atau torsi gerakan dapat dipasang sistem gearbox, baik sistem direct-gear (sistem lurus,
sistem ohmic/worm-gear, planetary gear, dsb), sprochet-chain (gir-rantai, gir-belt,
ataupun sistem wire-roller, dsb).
5. Sistem Roda
Adalah sistem mekanik yang dapat menggerakkan robot untuk berpindah posisi. Dapat
(kiri-kanan independen ataupun sistem belt seperti tank), tiga roda (synchro drive atau
sistem holonomic), empat roda (Ackermann model/car like mobile robot ataupun sistem
mecanum wheels) ataupun lebih.[1]
2.1.2.Sstem Kontrol Dasar Robotika
Sistem kontrol ON/OFF, kadangkala disebut juga sebagai “bang-bang control”,
adalah kontrol yang paling dasar dalam robotika. Input sensor dan sinyal output pada
aktuator dinyatakan hanya dalam dua keadaan yaitu ON/OFF atau logika 1 atau 0. Dalam
berbagai aplikasi dasar cara ini sudah cukup memadai karena mampu mengontrol robot
untuk mencapai target yang dikehendaki. Teori kinematik apalagi dinamik robot belum
diperhitungkan dalam disain keseluruhan. Kestabilan gerak yang diperoleh hanya
berdasarkan pada rule sederhana tetapi mampu menjaga robot dari gerakan yang
menyebabkan tracking error (TE) menjadi membesar. Dalam hal ini pemasangan posisi
sensor, aktuator dan struktur mekanik robot sangat berperan. Meski kebanyakan belum
dihitung secara matematis, namun bagi mereka yang berpengalaman dalam mekanik dan
elektronik praktis, rancangan struktur mekanik, konfigurasi sensor-aktuator dan cara
pemasangannya bahkan seringkali cukup ‘diperkirakan’ saja. Sebagai contoh, robot-robot
yang dibuat untuk keperluan kontes seperti pada Kontes Robot Indonesia (KRI).[1]
2.2.Mikrokontroler AT89S51
AT89S51 adalah mikrokontroler 8 bit yang dibuat dengan teknologi non-volatile
memori oleh Atmel, sebuah perusahaan yang menguasai teknologi flash memory sehingga
mikrokontroler ini juga dilengkapi dengan 4 Kbyte flash PEROM (Programmable and
Teknologi flash memory ini memungkinkan untuk menyimpan program dalam media
penyimpan internal, membaca program yang telah disimpan, menghapus maupun
memprogram kembali dengan lebih mudah dan cepat. Dengan kemampuan hapus / tulis
sebanyak lebih kurang 1000 kali, membuat mikrokontroler ini fleksibel untuk digunakan
dalam berbagai sistem terutama sistem yang akan terus dikembangkan. Mikrokontroler ini
merupakan anggota keluarga MCS – 51, sebuah keluarga mikrokontroler yang dipelopori
oleh perusahaan intel dengan memproduksi mikrokontroler 8051. [2]
2.2.1.Fitur Yang Dimiliki AT89S51
Fasilitas yang dimilki mikrokontroler ini antara lain 4 Kbyte ROM, 128 Byte RAM,
4 buah I/O Port masing – masing 8 bit, 2 buah timer 16 bit, Serial interface, 64 Kbyte
External Data Memory Spaces, Boolean processor (pada operasi bit), dan 210 lokasi yang
dapat dialamati per bit. Diagram blok bagian – bagian mikrokontroler AT89S51 dan
hubungan antar bagian tersebut secara lebih jelas dapat dilihat pada lampiran data sheet.[3]
2.2.2.Organisasi Memori AT89S51
Mikrokontroler AT89S51 memiliki memory data dan memory program yang terpisah
penyimpanannya. Data akan tersimpan di RAM (Random Access Memory) sedangkan
program disimpan di Flash PEROM. Secara umum mikrokontoler keluarga MCS51
mempunyai struktur memory yang terdiri atas memory data dan memory program.[2][3]
2.2.2.1.Memori Data
Memory data yaitu memory yang digunakan untuk menyimpan data sementara ketika
dimatikan (non-volatile). Memory ini dibagi menjadi dua yaitu RAM internal dan SFR
(Special Function Register).[3]
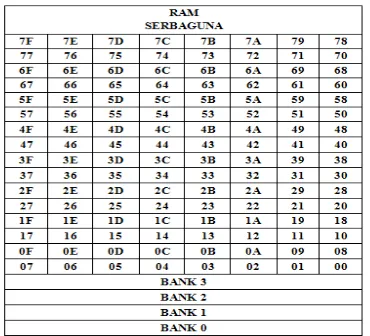
2.2.2.1.1.RAM Internal
RAM internal berfungsi sebagai penyimpan variable data yang bersifat sementara
(Volatile). RAM internal terdiri atas Register Bank, Bit Addressable RAM, General
Purphose RAM. RAM internal digunakan untuk memory data. Sifat dari RAM ini yaitu data
yang disimpan di dalamnya akan hilang ketika catu daya dimatikan (non – volatile). Gambar
2.1 mengilustrasikan peta memory RAM [3]
Gambar 2.1 Peta Memory RAM
a) Register Banks
Mikrokontroler MCS51 memiliki 4 buah Bank, setiap bank mempunyai 8 buah
register (R0 . . . R7).
Bank 0 pada alamat 00h – 07h; merupakan bank default
Bank 1 pada alamat 08h – 0Fh;
Bank 3 pada alamat 18h – 1Fh;
b) Bit Addressable RAM
Area RAM pada alamat 20h – 2Fh dapat diakses secara bit (bit addressable),
sehingga dengan sebuah instruksi setiap bit dalam area ini dapat dilakukan pengaksesan
(setb, clear dll). Dengan adanya pengaksesan bit pada area ini kita dapat melakukan
manipulasi bit dengan hanya 1 instruksi.
c) General purpose RAM
Area memory ini berawal pada alamat 30h – 7Fh. Dapat diakses dengan
pengalamatan langsung dan tak langsung, memory ini berfungsi sebagai tempat
penulisan sementara yang kemudian dapat diambil jika dibutuhkan. [3]
2.2.2.1.2.SFR (Special Function Register)
Special functions register / SFR seperti yang ditunjukkan pada gambar 2.2 yaitu
register dengan fungsi khusus yang disediakan sebagai fasilitas pada keluarga MCS51
seperti timer/counters, port I/O, accumulator, PSW, DPTR, Interupt, serial communication
dan lain – lain. Mikrokontroler AT89S51 memilki 12 SFR yang terletak pada alamat 80h –
FFh yang sebagian dapat dialamati per-bit dan sebagian lain tidak bisa. [3]
SFR dipakai untuk mengatur perilaku mikrokontroler yang berisi register dasar,
register data input/output dan status register. Register data untuk menulis program, register
data input/output untuk menyimpan data pada port tertentu, register status berguna untuk
Gambar 2.2 Special Functions Register (SFR)
Register dasar memiliki beberapa register diantaranya Program Counter
(PC), Accumulator (A), Stack Pointer (SP), Program Status Word (PSW). Pada keluarga
MCS51 memilik register B dan data Pointer Register (DPTR).
1. Program Counter (PC) yaitu register 16 bit yang berisi alamat yang akan dikerjakan,
saat reset PC bernilai $0000. Nilai PC akan bertambah 1 setelah prosesor mengambil
instruksi 1 Byte.
2. Accumulator (A) yaitu register untuk menampung data. Register ini mempunyai
fungsi yang sangat luas unruk operasi aritmatik maupun logika dan bisa diakses
3. Stack Pointer (SP) yaitu register yang digunakan untuk menyimpan sementara dari
nilai PC sebelum subroutine dijalankan. Saat selesai mengerjakan subroutine nilai
PC akan dikembalikan dengan cara mengambil stack pointer.
4. Program Status Word (PSW) pada gambar 2.3 yaitu register 8 bit yang terdiri atas
bit CY, AC, F0, RS0, RS1, OV, dan O. Register ini digunakan untuk menyimpan
informasi status prosesor, dan bit ke 1 tak digunakan.
Gambar 2.3 Program Status Word (PSW)
fungsi – fungsi bit pada PSW yaitu:
CY : carry setelah operasi aritmatika
AC : auxiliary carry setelah operasi aritmatika
FO : flag yang berfungsi umum
RS1, RS2 : untuk memilih bank register
OV : Overflow setelah operasi aritmatika
P : Parity
5. Register B digunakan untuk membantu accumulator
6. Data Pointer Register (DPTR) yaitu register 16 bit yang terletak pada alamat 82h
dan 83h yang digunakan untuk mengakses kode operasi (Op-code) dari memory
eksternal dan sebagai operasi tabel tengok (Look Up table). Register ini dibagi
menjadi data pointer high byte (DPH) dan data pointer low byte (DPL) yang masing
2.2.3.Pewaktu / Pencacah (Timer / Counter)
Pada mikrokontroler AT89S51 mempunyai dua buah pewaktu/pencacah 16 bit yang
berguna untuk mengukur interval waktu, lebar pulsa, penghitung kejadian dan sumber
interupsi.
Pada konfigurasi dari pewaktu (timer) maka isi register pewaktu ditambah ssatu
setiap siklus mesin, dan pada konfigurasi sebagai pencacah (counter) isi register pencacah
ditambah satu setiap ada transisi 0 ke 1 pada pin input eksternal. Dalam mikrokontroler ini
terdapat dua buah register pewaktu dan pencacah yaitu TMOD (timer mode control) dan
TCON (timer control). AT89S51 mempunyai dua buah timer yaitu timer 0 dan timer 1
keduanya dapat berfungsi sebagai timer ataupun counter. Sebetulnya secara fisik rangkaian
timer juga merupakan rangkaian flip – flop yang dapat diaktifkan atau dinonaktifkan setiap
saat. Perbedaan dari timer dan counter yaitu timer mempunyai sumber clock dengan
frekuensi tertentu yang sudah pasti sedangkan counter mendapat sumber clock dari pulsa
yang hendak dihitung jumlahnya. Untuk mengatur timer AT89S51 mempunyai 6 buah
Special Function Register (SFR). [2]
2.2.3.1.TMOD
Register TMOD mempunyai dua register kembar 4 bit yang terletak pada alamat 89h. Untuk lebih jelas perhatikan gambar 2.4.
Gambar 2.4 Register – Register pada TMOD.
1. Gate : timer akan berjalan jika bit ini diset dan INT0 (untuk
timer 0) atau INT1 (untuk timer 1) berkondisi high.
2. C / T : jika diberi logika 1 sebagai counter dan diberi logika
0 sebagai timer
3. M0 dan M1 : untuk memilih mode timer. [2]
2.2.3.2.TCON
Gambar 2.5 Register – Register pada TCON.
Perhatikan gambar 2.5. Register ini hanya mempunyai 4 bit saja dari 8 bit TCON,
yaitu TCON.4, TCON.5, TCON.6, TCON.7. keempat bit tersebut berhubungan dengan
fungsi timer. Register ini bersifat bit addressable, sehingga tiap bit TCON dapat
dimanipulasi sesuai dengan fungsinya masing – masing.
1. TCON.7 (TF1) : sebagai timer 1 overflow yang akan diset jika hitungan timer
overflow.
2. TCON.6 (TR1) : jika set (1) berfungsi mengaktifkan timer 1, jika clear (0) berfungsi
mematikan timer 1.
3. TCON.5 (TF0) : sebagai timer 0 overflow flag yang akan diset jika hitungan timer
overflow.
4. TCON.4 (TR0) : jika set (1) berfungsi mengaktifkan timer 0, jika clear (0) berfungsi
mematikan timer 0.
2.2.4.Mode Timer
Mode timer pada mikrokontroler ini mempunyai empat jenis yaitu :
1. Mode 0 yaitu merupakan pencacah atau pewaktu dengan menggunakan praskala.
Register TH0/TH1 bekerja sebagai pencacah 8 bit dan register TL0 dan TL1 sebagai
pencacah 5 bit.
2. Mode 1 yaitu mode dimana register TH0-TL0 dan TH1-TL1 digunakan sebagai
pencacah 16 bit.
3. Mode 2 yaitu pencacah atau pewaktu auto-reload. Register TL1/TL0 bekerja sebagai
pencacah 8 bit dan TH0/TH1 digunakan untuk menahan nilai tertentu yang akan
disimpan di TL1/TL0 pada setiap TL1/TL0 terjadi overflow karena berguling dari FF
ke 00 dan dibangkitkan pulsa untuk pengiriman dan penerimaan data pada port serial.
4. Mode 3 yaitu untuk pencacah 1, pengubahan ke mode 3 akan menghentikan pencacah
satu yang merupakan cara lain penggunaan TR1 untuk menghentikan dan
menjalankan pencacah 1. Untuk pencacah 0, TH0 sebagai pencacah 8 bit yang
diaktifkan oleh TR1 dan jika terjadi overflow bit TF1 akan diset. Sedangkan TF1
tidak dapat digunakan untuk mengendalikan pencacah 1. TL0 sebagai pencacah 8 bit
dikendalikan oleh GATE 0, C/T 0, TR0 dan TF0. [2]
Tabel 2.1 Mode Pencacah / Waktu
M1 M0 MODE
0 0 0
0 1 1
1 0 2
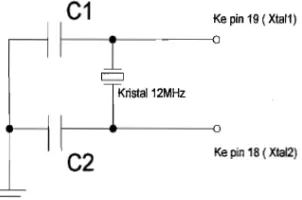
2.2.5.Rangkaian Oscillator
Pada mikrokontroler AT89S51 mempunyai oscillator internal (on-chip oscillator)
yang digunakan sebagai sumber clock CPU. Untuk dapat menggunakannya perlu
ditambahkan sebuah rangkaian sederhana menggunakan sebuah Kristal dan dua buah
kapasitor (C1 dan C2) seperti pada gambar 2.6. [2]
Gambar 2.6 Rangkaian Oscillator.
2.2.6.Mekanisme Reset
Reset bisa dikendalikan secara manual dan automatic, saat reset maka nilai default
register SFR dapat dilihat pada tabrl. Reset terjadi karena logika 1 selama 2 cycle ( 2 detik )
pada kaki reset. Setelah pin reset kembali low maka mikrokontroler akan memulai
menjalankan program dari alamat 0000h pada PC, namun kondisi RAM tidak berubah dari
kondisi terakhir walaupun sistem reset.
Pada gambar 2.7, R1 digunakan untuk membuang muatan pada kapasitor ( C ) sesaat
setelah tombol reset tertekan sehingga diperoleh tunda level high sekitar 2 detik untuk
mereset mikrokrontroler. [2]
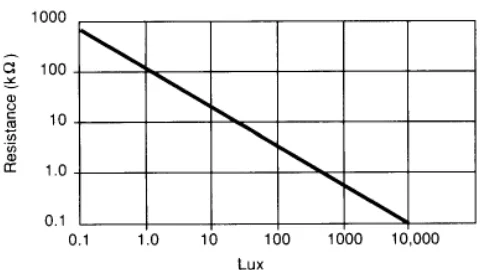
2.3.Light-Dependent Resistor (LDR)
LDR adalah sebuah resistor yang nilai resistansinya dapat berubah – ubah tergantung
dari cahaya yang mengenainya. LDR terbuat dari kadmium sulfida. Unsur kimia yang
disebut kadmium sulfida memiliki sifat yang khas dimana resistansi listriknya akan
berkurang bila ada cahaya yang jatuh di atasnya. Efek ini dimanfaatkan dengan
menempatkan lapisan kimia ini pada kotak logam yang ditutup oleh jendela tembus
pandang. Dibandingkan dengan jenis optical transducer lainnya, tanggapan LDR sangat
lambat (dalam seperseratus detik). [4]
Untuk simbol rangkaian dan karakteristik resistansi LDR terhadap intensitas cahaya
dapat dilihat pada gambar 2.8 dan 2.9.
Gambar 2.8 Simbol Rangkaian LDR
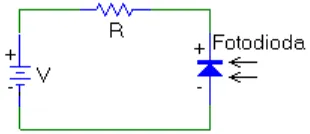
2.4.Fotodioda (Photodiode)
Fotodioda adalah salah satu alat yang dibuat untuk berfungsi paling baik berdasarkan
kepekaannya terhadap cahaya. Pada dioda ini, sebuah jendela memungkinkan cahaya masuk
melalui pembungkus dan mengenai persambungan pn. Silikon, yaitu bahan material di mana
transistor dan rangkaian terintegrasi dibuat, akan mengalami perubahan resistansi listrik saat
dikenai cahaya. Fotodioda sebenarnya tidak berbeda dari dioda biasa yang ditempatkan di
dalam material transparan, sehingga memungkinkan cahaya mengenainya (sedangkan pada
dioda biasa, kotaknya berupa logam atau plastik). Pada saat dihubungkan dengan rangkaian
listrik, fotodioda dapat digunakan untuk menghasilkan sinyal listrik yang besarnya
tergantung pada jumlah cahaya yang mengenainya. [4]
Gambar 2.10 menunjukan lambang skematis fotodioda. Panah yang mengarah ke
dalam melambangkan cahaya yang datang. Sumber dan tahanan seri memberikan
prategangan balik pada fotodioda. Bila cahaya makin cerah, arus balik naik. Dalam
fotodioda yang lazim, arus balik tersebut besarnya sedikit puluhan mikroamper.[4]
Gambar 2.10 Simbol Rangkaian Fotodioda
2.5.Light Emiting Diode (LED)
LED adalah dioda berprategangan maju, dimana elektronbebas melintasi sambungan
elektron akan mengeluarkan energi. Pada diode biasa, energi dikeluarkan dalam bentuk
panas. Tetapi pada LED, energi dikeluarkan dalam bentuk sinar. Dengan menggunakan
elemen seperti gallium, arsenik, dan fosfor, pabrik dapat memproduksi LED berwarna
merah, hijau, kuning, biru, orange / jingga, dan inframerah / infrared (tak terlihat). Gambar
2.11 menunjukkan simbol LED. [4]
Gambar 2.11. Simbol LED
2.5.1.Tegangan dan Arus LED
LED mempunyai penurunan tegangan lazimnya dari 1,5 V sampai 2,5 V untuk arus
di antara 10 sampai 150 mA. Penurunan tegangan yang tepat tergantung dari arus LED,
warna, kelonggaran, dan sebagainya. Kecermelangan LED tergantung dari arusnya.
Idealnya, cara terbaik untuk mengendalikan kecermelangan ialah dengan menjalankan LED
dengan sumber arus. Berikut rangkaian LED pada gambar 2.12. [4][5]
Gambar 2.12 Rangkaian LED
(2.1)
Vs = Tegangan sumber (volt)
Rs = Resistor yang tersusun seri dengan LED (Ohm)
I = Arus (Ampere)
Makin besar tegangan sumber, makin kecil pengaruh VLED. Dengan kata lain Vs yang besar
menghilangkan pengaruh perubahan tegangan VLED. Biasanya, arus LED ada di antara 10
mA sampai 50 mA karena daerah ini memberikan cahaya yang cukup untuk banyak
pemakai.[4][5]
2.6.Optocoupler
Optocoupler disebut juga optoisolator adalah komponen yang terdiri dari dioda
pemancar radiasi sinar infra merah (LED inframerah) dan fotodioda atau fototransistor
sebagai penerima dalam satu kemasan. Dengan LED pada sisi masukan dan fotodioda pada
sisi keluaran. Perhatikan gambar 2.13, tegangan sumber V1 dan tahanan seri R1
menghasilkan arus melalui LED. Sebagai gantinya, cahaya dari led mengenai fotodioda, dan
ini menyebabkan timbulnya arus balik I2. Dengan menambahkan tegangan – tegangan
melingkari simpal keluaran, diperoleh
Gambar 2.13 Rangkaian Optocoupler
Atau
(2.3)
Perhatikan bahwa tegangan keluaran tergantung pada arus I2. Bila tegangan masukan
V1 berubah, intensitas cahayanya juga berubah. Ini berarti bahwa tegangan keluar berubah
sejalan dengan tegangan masuk. Itulah sebabnya mengapa gabungan LED dan fotodioda
disebut Optocoupler.[4]
Keuntungan utama optocoupler ialah pemisahan secara listrik antara rangkaian
masuk dan rangkaian keluarnya. Dengan optocoupler, hubungan yang ada antara masukan
dan keluaran hanya seberkas cahaya. Karena hal ini, kita dapat memperoleh resistansi
penyekatan di antara dua rangkaian itu dalam ribuan megaohm. [4]
2.7. Pembagi Tegangan
Seperangkat resistor terhubung seri seperti gambar 2.14 disebut pembagi tegangan
(voltage – divider). Konsep ini berlaku bukan saja untuk resistor tetapi juga berlaku untuk
impedansi yang terhubung seri. [6]
Gambar 2.14 Rangkaian Tiga Resistor Terhubung Seri
(2.4)
2.8.Saklar Batas (Limit Switch)
Saklar batas atau lebih dikenal dengan Limit switch merupakan salah satu jenis
kontak yaitu komponen yang berfungsi untuk menghubungkan dan memutuskan arus. Sifat
dari limit switch ini yaitu kontak yang terputus atau tersambung saat ditekan dan akan
kembali ke keadaan semula saat tidak ditekan (momentary contact). Pada limit switch
terdapat tiga terminal yaitu common (COM), terminal normally open (NO) dan terminal
normally closed (NC).
Terminal NO merupakan terminal yang pada kondisi normal berupa kontak terputus
atau tidak tersambung dengan COM sedangkan terminal NC berupa kontak pada kondisi
normal tersambung dengan COM. Setiap titik sambungan pada limit switch terbuat dari
bahan yang tahan busur api (arc) yang disebabkan saat arus terputus atau tersambung.
Simbol keadaan limit switch ada pada gambar 2.15. [7]
Gambar 2.15 Kondisi Limit Switch NO dan Kondisi Limit Switch NC.
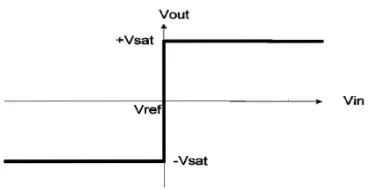
2.9.Komparator
Rangkaian dengan op-amp dapat digunakan sebagai pembanding tegangan yang akan
keluaran (Vo) tergantung besarnya Vin apakah lebih besar daripada Vref atau lebih kecil dari
Vref
Gambar 2.16 Op-amp Komparator dan Karakteristik Tegangan Output (Vo)
Pada gambar 2.16 jika tegangan masukan (Vin) lebih besar daripada tegangan
referensi (Vref) maka tegangan keluaran (Vout) adalah positif jenuh tegangan V+ atau (+Vsat). Sebaliknya jika tegangan masukan (Vin) lebih kecil daripada tegangan referensi
(Vref) maka nilai tegangan keluaran (Vout) adalah negatif jenuh tegangan V- atau (-Vsat). Jadi Vout mempunyai nilai yang besarnya +Vsat dan –Vsat dan dapat pula bernilai 0V
tergantung pemberian catu pada kaki V+ dan V-. Gambar 2.17 menunjukan grafik antara Vin, Vout, dan Vref. [8]
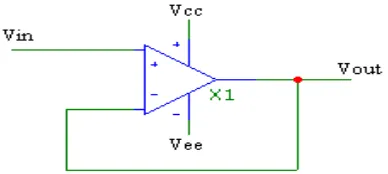
2.10.Voltage Buffer (Penyangga Tegangan)
Buffer (penyangga) adalah rangkaian op-amp yang digunakan untuk mencegah
terjadinya drop tegangan. Buffer tegangan (voltage buffer) berarti mengisolasi sebuah sinyal
masukan dari sebuah beban dengan menggunakan rangkaian yang memiliki unity voltage
gain, dengan tanpa pembalikkan fasa atau polaritas, dan bekerja sebagai rangkaian ideal
dengan impedansi masukan yang sangat tinggi dan impedansi keluaran yang rendah. Gambar
2.18 menunjukkan koneksi op-amp yang menunjukan operasi buffer amplifier. Tegangan
keluaran pada buffer akan sama dengan tegangan masukannya.[8]
Gambar 2.18. Rangkaian Buffer Tegangan
2.11.Aktuator Menggunakan Motor DC
Motor DC merupakan salah satu penggerak (actuator) pada sistem kontrol yang
mudah diatur arah putar dan kecepatannya. Motor DC ada bermacam – macam dan pada
dasarnya dibedakan adalah voltase-nya dan jenis arah putarnya. Arah putar motor DC ada
dua yaitu CW (clock wise / searah jarum jam) dan CCW (Counter clock wise / berlawanan
arah jarum jam).
Pengaturan arah putar motor DC dilakukan dengan mengubah polaritas tegangannya
dilakukan dengan saklar, rangkaian control relay maupun rangkaian pensaklaran elektronik
dengan jembatan H.
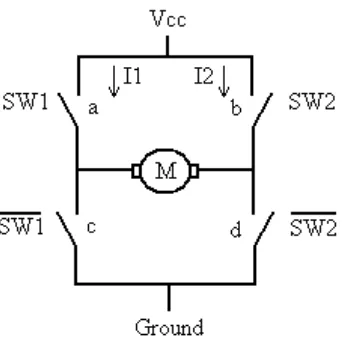
Gambar 2.19 merupakan jembatan H yang digunakan untuk mengubah arah putar
motor DC.
Gambar 2.19. Kontrol Motor DC Menggunakan Jembatan H
Pada dasarnya motor akan berputar jika kondisi SW1 dan SW2 saling berlawanan
yaitu SW1 ON dan SW2 OFF atau SW1 OFF dan SW2 ON. Ketika SW1 ON dan SW2
OFF maka arus (I1) mengalir dari a melewati motor kemudian masuk d dan ke ground
sehingga motor akan berputar CW, begitu juga jika SW1 OFF dan SW2 ON maka arus (I2)
mengalir dari b melalui motor masuk ke c dan ke ground sehingga motor akan berputar
CCW.
Ketika SW1 dan SW2 pada kondisi ON pada saat yang bersamaan maka tidak ada
arus sampai ke ground sehingga motor tidak akan berputar. Hal serupa akan sama jika SW1
dan SW2 pada kondisi OFF pada saat yang sama maka tidak ada arus yang melewati motor
Untuk mengontrol kecepatan motor saklar penghubung antara catu daya dengan
motor dibuka dan ditutup, waktu saklar ditutup atau dibuka berbeda – beda yang bertujuan
untuk memberikan rata – rata tegangan ke motor berbeda – beda pula. Teknik ini dinamakan
dengan pulse-width modulation seperti yang diilustrasikan pada gambar 2.20. V adalah
tegangan catu yang diberikan ke motor dan t adalah waktu. Kecepatan motor DC dapat
diatur dengan mengubah rasio pulse-width : [9]
!"#$% &' "( )*
+,-./0, (2.5)
Gambar 2.20 Pulse-Width Modulation
2.12.IC Driver L293
IC ini merupakan IC driver tegangan tinggi (high voltage) hingga mencapai 36 V.
keempat saluran driver berarus tinggi (600mA per-saluran dan 1,2A puncak arus keluaran
(non repetitive) persaluran) dirancang untuk level logika TTL atau DTL dan men-drive
beban induktif (seperti relay, solenoid, motor DC dan motor stepper) dan switching
Untuk memudahkan maka digunakan sebagai dua jembatan (bridge), setiap pasang
saluran (channel) dilengkapi dengan masukan enable. Di dalam IC ini juga sudah terdapat
dioda pengaman yang terdiri dari 4 buah. IC ini bisa digunakan untuk aplikasi switching
pada frekuensi sampai 5kHz. Masukan untuk supply terpisah agar mudah digunakan untuk
bekerja pada tegangan yang rendah. Gambar 2.21 merupakan gambar blok diagram dan pin
connections dari IC L293D.[10]
BAB III
RANCANGAN PENELITIAN
3.1.Model Sistem
Gambar 3.1 berikut adalah diagram sistem secara umum yang akan digunakan pada
penelitian. Sensor jalur akan mendeteksi garis (line) dan akan memberi masukan pada
mikrokontroler untuk menentukan arah gerak robot dengan cara merubah kecepatan gerak
roda kiri dan kanan. Sensor surat akan mendeteksi cahaya LED yang akan dipancarkan dari
loker surat sebagai penanda adanya surat pada loker tersebut. Sensor surat akan memberi
masukan pada mikrokontroler dan mikrokontroler akan menjalankan motor DC penggerak
lengan untuk mengambil surat tersebut. Jika surat sudah diantarkan di tempat tujuan, lengan
mekanik akan diputar 90o berlawanan dengan arah jarum jam dan meletakkan surat dari lengan dan diputar 900 lagi searah dengan jarum jam untuk kembali ke posisi semula.
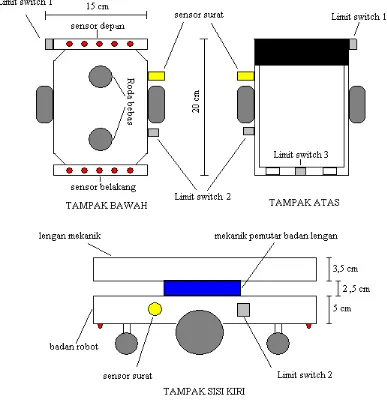
Gambar 3.2 berikut merupakan desain jadi dari robot pengantar surat
Gambar 3.2. Desain Jadi Robot Pengantar Surat
3.2.Alur Perancangan Sensor Jalur (Line Sensor)
Terdapat dua bagian dasar pada sensor jalur, yaitu sensor pendeteksi cahaya luar dan
sensor pendeteksi jalur hitam. Sensor pendeteksi cahaya luar berfungsi sebagai penentu
tegangan referensi pada masukan komparator dan agar cahaya luar tidak mempengaruhi
dengan fotodioda dengan prinsip kerja seperti optocoupler. Keluaran sensor pendeteksi jalur
dan sensor sensivisitas cahaya luar sebagai masukan untuk komparator. Keluaran
komparator berupa sinyal digital berlogika 1 atau 0 dan akan menjadi masukan untuk
mikrokontroler. Gambar 3.3 merupakan diagram sistem secara umum
Gambar 3.3 Diagram Sistem Sensor Jalur Secara Umum
3.2.1Sensor Pendeteksi Garis Hitam
Sensor pendeteksi jalur hitam ini terdiri atas LED inframerah sebagai sumber cahaya
dan fotodioda sebagai penerimanya sehingga bekerja seperti optocoupler. Sensor ini
berfungsi untuk mendeteksi apakah ada jalur atau tidak. Jika terdeteksi jalur hitam maka
keluaran sensor akan berlogika 0, dan jika tidak ada jalur yang terdeteksi maka keluaran
sensor akan berlogika 1. Sensor ini terdapat lima buah dipasang dibagian paling depan pada
badan robot dan lima buah di bagian paling belakang badan robot. Keluaran komparator
akan langsung masuk ke port p1.0 – p1.4 pada AT89s51 untuk sensor bagian depan, dan ke
port p2.0 – p2.4 untuk sensor bagian belakang. Sensor jalur bagian depan robot dan bagian
belakang akan dibuat identik. Gambar 3.4 mengilustrasikan desain sensor jalur untuk bagian
Gambar 3.4 Desain Sensor Jalur Bagian Depan
Penjelasan berikut adalah penjelasan untuk salah satu sensor pendeteksi jalur hitam
karena kesepuluh sensor akan dibuat identik. Berdasarkan dasar teori di atas, arus maximum
LED adalah 150 mA dan VLED adalah 1,5 Volt. Dengan Vcc (catu daya) 5 Volt, maka dapat
dicari Rs maximum dan Rs minimum dengan persamaan 2.2 sebagai berikut :
5 1,5
150 23 Ω
5 1,5
10 350 Ω
Resistor yang digunakan dalam perancangan adalah 330 dikarenakan terdapat di pasaran
dan agar mendapat nilai arus yang kecil namun masih termasuk dalam nilai optimum (10m
A – 150mA), yaitu :
5 1,5
330 10,6
Berdasarkan perhitungan di atas didapat arus 10,6m A. Pengurangan arus bertujuan agar
intensitas cahaya yang dikeluarkan LED inframerah tidak terlalu besar sehingga jika
dipantulkan oleh benda berwarna hitam tidak akan mengaktifkan fotodioda.
Rind dapat dicari dengan menggunakan persamaan yang sama dengan Rs sehingga
memiliki besar resistansi yang sama dengan Rs. Rind merupakan resistor pengaman untuk
LED indikator (LED berwarna merah). LED indikator akan menyala (on) jika keluaran
berlogika 1 (5 volt / Vcc). Rd merupakan resistansi yang akan menentukan tegangan keluaran
fotodioda. Tabel 3.1 merupakan tabel data pra penelitian untuk mengetahui karakteristik
fotodioda dan Gambar 3.5 merupakan gambar rangkaian secara skematik.
Gambar 3.5 Rangkaian Sensor Jalur Hasil Perancangan
Tabel 3.1 Karakteristik Fotodioda Hasil Pra Penelitian
RD (k Ohm)
Kondisi Ruang VIR VD VD terpantul putih VD terpantul hitam 1 Terbuka (terang) 1,194 V 5,48 V 4,23 V 5,5 V
Tertutup (gelap) 1,194 V 5,54 V 4,10 V 5,37 V 2 Terbuka (terang) 1,194 V 4,9 V 2,68 V 5,48 V Tertutup (gelap) 1,194 V 5,38 V 3,57 V 5,5 V 3 Terbuka (terang) 1,194 V 4,78 V 1,70 V 4,78 V
Tertutup (gelap) 1,194 V 5,33 V 1,50 V 5,24 V 4 Terbuka (terang) 1,194 V 133,2 mV 97,5 mV 133,2 mV
Tertutup (gelap) 1,194 V 160 mV 100,5 mV 160 mV
Dari tabel 3.1, pada resistor RD = 3k Ohm memiliki beda tegangan ON – OFF yang cukup
tinggi saat cahaya inframerah terpantul benda berwarna putih dengan jarak pantul 1 cm,
yaitu:
∆ 4,78 1,7 3,08
3.2.2.Sensor Sensitivitas Cahaya Luar
Sensor ini berfungsi untuk penghasil tegangan referensi untuk masukan komparator.
Alat yang digunakan adalah LDR sebagai pendeteksi cahaya luar. Letak sensor ini dibagian
body robot yang mudah terkena cahaya lingkungan. Op-amp digunakan sebagai buffer dan
keluaran buffer akan dihubungkan ke sepuluh komparator (5 buah untuk tegangan referensi
sensor bagian depan dan 5 buah untuk tegangan referensi sensor bagian belakang).
Rpot untuk mengatur tegangan yang akan masuk ke buffer dengan prinsip pembagi
tegangan. Dari data percobaan yang dilakukan sendiri, diketahui karakteristik LDR sebagai
berikut :
Tabel 3.2 Karaktersistik LDR
Kondisi ruang Resistansi LDR (k Ohm) Intensitas cahaya (lux)
Terang 7,69 375
Gelap 15,5 55
Tertutup (sangat gelap) 105 5
Keterangan : Terang : kondisi ruang dengan lampu menyala dan terkena cahaya matahari.
Gelap : kondisi ruang tertutup dengan lampu tanpa cahaya matahari
Tertutup : keadaan ditutup sehingga tidak terkena cahaya lampu maupun matahari
Dengan nilai keluaran (Vref) yang diharapkan sebesar 3,2V atau nilai tengah antara
tegangan fotodioda saat OFF dan saat ON seperti gambar 3.6 berikut
Sehingga dapat dicari nilai Resistansi pada potensiometer saat tegangan keluaran 3,2V
adalah:
#$%
&
&' ()*
+ ,,
3,2 7,69.
7,69. ' ()* + 5
()*
7,69. 100 + 5 3,2 + 7,69. 100
3,2 4,325625 . 12
Potensiometer yang digunakan adalah 10k Ohm tujuannya adalah agar dapat diatur
kesensitifitas rangkaian sensor terhadap cahaya luar. Berikut gambar 3.7 adalah rangkaian
secara skematik :
Gambar 3.7 Rangkaian Pendeteksi Cahaya Luar / Pengatur Sensitivitas
3.3.Alur Perancangan Lengan Mekanik
Lengan mekanik diambil dari CD-ROM yang sudah tidak terpakai dan yang
dimanfaatkan adalah motor DC beserta mekaniknya yang berfungsi untuk membuka dan
Gambar 3.8 Lengan Mekanik dan Pergerakannya.
LS merupakan limit switch yang akan mengendalikan motor DC pengendali putaran lengan.
Berikut tabel kondisi yang terjadi saat logika LS1, LS2 , LS3 berubah.
Tabel 3.3 Kondisi Limit Switch
LS1 LS2 LS3 Kondisi
1 0 1 Kondisi awal, tidak mempengaruhi / mengendalikan apapun
1 0 0
Kondisi saat lengan membuka. Lengan membuka jika robot sudah berada didepan loker, ditandai dengan habisnya jalur. Setelah membuka penuh, sensor belakang akan aktif dan sensor depan akan off.
0 0 0
Kondisi ini terjadi saat lengan mekanik sedang berputar 90o. Lengan mulai berputar saat jalur yang menuju tempat tujuan habis.
0 1 0
Kondisi ini terjadi saat lengan sudah beputar 90o. badan lengan akan menekan LS2 sehingga akan berlogika 1. Jika LS2 sudah berlogika 1 maka lengan akan menutup.
0 1 1
Di ujung lengan yang bergerak untuk mengambil surat terdapat dua buah landasan
berbentuk segitiga, hal ini bertujuan untuk proses pengangkatan dan peletakan surat. Untuk
proses pengangkatan surat dapat dilihat gambar 3.9.
Gambar 3.9 Proses Pengambilan Surat
Terdapat empat kondisi yang akan dijelaskan. kondisi pertama merupakan kondisi
saat slider / lengan pengambil sedang bergerak mengambil surat. kondisi kedua adalah
kondisi saat surat dan lengan mulai kontak. Karena adanya segitiga di ujung maka surat akan
terangkat mengikuti landasan segitiga. Surat tidak akan jatuh ke belakang karena adanya
penahan di kedua sisi surat yang berada di dalam loker. Kondisi ketiga merupakan kondisi
dimana posisi segitiga sudah melebihi bagian tengah surat. Karena sisi depan lebih berat
daripada sisi belakang surat, maka surat akan jatuh ke arah lengan. Kondisi keempat
merupakan kondisi saat lengan sudah membuka penuh, diharapkan surat sudah berada di atas
lengan. Limit switch 1 akan terhubung ke port 3.5, limit switch 2 akan terhubung ke port
3.6, limit switch 3 akan terhubung ke port 3.7 pada AT89S51. Input motor pemutar body
lengan dikendalikan oleh AT89s51 melalui port 3.3 dan 3.4. Sedangkan input motor DC
Untuk proses peletakan surat dapat dilihat pada gambar 3.10 berikut ini
Gambar 3.10 Proses Peletakan Surat
Terdapat tiga kondisi yang terjadi selama proses. Kondisi pertama terjadi saat surat
sedang diantar dari loker ke tempat tujuan. Kondisi kedua terjadi saat Slider / lengan
pengambil mulai masuk ke body lengan. Body lengan bagian depan diberi penahan yang
terbuat dari akrelik untuk menahan surat sehingga tidak ikut masuk bersamaan dengan
slider. Surat akan terangkat ke atas mengikuti landasan segitiga seperti prinsip pengambilan
surat. Kondisi ketiga adalah kondisi terakhir dimana bila sisi depan surat sudah lebih berat
dari sisi belakang (posisi segitiga sudah berada lebih dari titik tengah surat) maka surat akan
jatuh mengikuti landasan segitiga sisi depan.
Perhatikan gambar 3.11, segitiga sisi depan lebih landai bila dibandingkan dengan
sisi belakang. Tujuannya adalah agar saat robot bergerak saat membawa surat, surat tidak
mudah jatuh terkena gaya tolak dari gerakan robot. Dengan kata lain, sisi belakang segitiga
.
Gambar 3.11 Rancangan Segitiga Penahan
Panjang body lengan adalah 20,2cm, lebar 14cm, dan tinggi 3,6cm. Panjang slider /
lengan pengambil 20cm, lebar 12,8cm, tinggi 1cm. Terdapat dua segitiga dengan masing –
masing Panjang segitiga penahan 1,5cm, lebar 1cm, dan tinggi 1cm.
3.4.Perancangan Loker Surat / Kotak Surat
Jumlah loker / kotak surat terdapat lima buah yang tersusun berjajar. Setiap kotak
berukuran 30 cm x 30 cm, terbuat dari papan triplek. Panjang lintasan/garis minimal 2 meter.
Gambar 3.12 Perancangan Lintasan dan Ukuran Loker
Didalam loker terdapat LED berwarna putih sebagai pendeteksi adanya surat atau
tidak. Jika terdapat surat, maka LED indikator akan aktif (ON). Gambar 3.13 adalah
rangkaian skematik untuk LED indikator.
Gambar 3.13 Skematik LED Indikator
Untuk penangkap cahaya dari indikator surat tersebut menggunakan LDR yang terpasang
pada body robot. Gambar 3.14 merupakan rancangan skematik untuk rangkaian penerima
ditutupi dengan pipa agar tidak terpengaruh cahaya dari lingkungan. Jika terdapat surat,
maka surat akan menekan limit switch yang terdapat di dalam loker dan akan menyalakan
LED indikator. Tinggi posisi LED pada kotak surat disesuaikan dengan tinggi posisi
penerima pada robot. Dari pra penelitian didapat data mengenai resistansi LDR saat ditutup
dengan pipa adalah sebagai berikut:
Tabel 3.4 Data Pra Penelitian Untuk Karakteristik LDR yang Ditutup Pipa
kondisi Resistansi LDR
Tidak menerima cahaya dari LED putih Tak terhingga Menerima cahaya dari LED putih 16k
Berdasarkan resistansi terendah dari LDR maka ditentukan Rp = 16 k sehingga nilai
terendah yang dapat dicapai dengan prinsip pembagi tegangan adalah :
*$#$ 3 4
16 + 100
16 + 100' 16 + 100 + 5 567 2,5 567
Sedangkan untuk nilai tertinggi yang dapat dicapai adalah :
*$#* 88
∞
16 + 100' ∞ + 5 567 5 567 ::
Dari nilai terendah dan tertinggi dapat dicari nilai tegangan referensi untuk masukan
komparator, yaitu :
#$%
*$#* 88 *$#$ 3 4
2 ' *$#$ 3 4
#$%
5 567 2,5 567
2 ' 2,5 567 1,25 567 ' 2,5 567 3,75 567
Gambar 3.14 Rancangan Skematik Rangkaian Penerima.
Gambar 3.15 Rancangan Perangkat Keras Penerima
Gambar 3.16 merupakan ilustrasi dari karakteristik tegangan keluaran LDR dan
tegangan referensi.
3.5.Perancangan Motor DC Sebagai Aktuator
Motor DC dipilih sebagai aktuator karena motor DC mudah diubah arah putarnya
yaitu hanya mengubah polaritas tegangan dan mudah dalam mengatur kecepatannya. Motor
DC yang digunakan dalam perancangan robot ini terdapat empat buah, dua buah untuk roda
kiri dan kanan, satu buah untuk pemutar body lengan, dan satu buah lagi untuk
mengeluarkan/memasukan lengan (slider). Masing – masing motor memerlukan driver yang
digunakan untuk menguatkan arus keluaran mikrokontroler. Driver motor yang digunakan
adalah IC driver, yaitu L293.
Untuk pengaturan kecepatan menggunakan prinsip PWM (Pulse Width modulation)
yang akan dihasilkan dari keluaran mikrokontroler. Masukan untuk motor DC pengendali
roda kiri dihubungkan ke port 1.6 dan port 2.6. Sedangkan untuk pengendali roda kanan
dihubungkan ke port 1.7 dan port 2.7. Gambar 3.17 merupakan rangkaian skematik untuk
penggerak roda kiri dan kanan. Tabel 3.5 berikut merupakan tabel kecepatan motor DC
untuk roda kiri dan roda kanan
Tabel 3.5 Kondisi Kecepatan Roda Berdasarkan Sensor
Kondisi Sensor Jalur Kecepatan roda kanan (%) Kecepatan roda kiri (%)
1 1 1 1 1 0 (diam) 0 (diam)
1 1 0 1 1 100% 100%
1 0 0 1 1 100% 75%
0 0 1 1 1 100% 50%
1 1 0 0 1 75% 100%
Gambar 3.17 Rangkaian Skematik Untuk Penggerak Roda Kiri dan Kanan
Pada motor penggerak lengan tidak dirancang dengan variasi kecepatan, hanya
dirancang untuk bergerak maju dan mundur untuk slider dan bergerak CW dan CCW untuk
pemutar body lengan. Gambar 3.18 merupakan rangkaian skematik untuk penggerak lengan
mekanik / slider.
Gambar 3.18 Rangkaian skematik untuk penggerak lengan mekanik / slider.
3.6.Mikrokontroller AT89S51
Semua program untuk sistem kendali robot ini dikendalikan oleh mikrokontroler
Gambar 3.19 Port I/O AT89S51 dan Fungsinya
Pada gambar 3.20, untuk rangkaian oscillator menggunakan kristal 12 MHz dan dua
buah kapasitor 33 pF sehingga frekuensi clock pada CPU 12 MHz. Pin EA/VPP diberi
logika tinggi (dihubungkan ke VCC) karena program hanya disimpan di dalam memory
internal saja dan tidak membutuhkan memory eksternal. Untuk rangkaian reset
menggunakan R1 = 100 dan R2 = 10 k . Saat tombol ditekan maka tegangan pada pin
reset (Vrst) yaitu:
# *
;
;' <
+ ::
# *
10 + 100
10 + 100' 100 + 5 567 4,95 567
Gambar 3.20 Rangkaian Reset dan Rangkaian Oscillator
3.7.Perancangan Daya dan Berat
Perancangan daya berfungsi untuk menentukan jenis baterai yang akan digunakan,
sedangkan pengukuran berat untuk menentukan letak rangkaian/desain agar robot tidak berat
hanya di salah satu sisi.
3.7.1.Perhitungan Daya Pada Rangkaian Sensor dan Mikrokontroller
Daya saat satu sensor jalur aktif :
)*)3 )3
:: =
3
5 0,7
3000 12 1,43
Vj adalah penurunan tegangan yang disebabkan sambungan pn dengan bahan silikon (dasar
yang melewati LED indikator yaitu 10,6m A. Sehingga arus total untuk satu sensor jalur
adalah
*)* > ?& ' )*)3 )3 ' 3 10,6 ' 1,43 ' 10,6 22,63
Sehingga daya yang dikonsumsi untuk satu sensor jalur adalah
@$ )# AA + *)* > 5 + 22,63 113,15 B
Daya rangkaian sensitivitas cahaya / penghasil tegangan referensi :
$ * C *
AA
& ' ()*
5
7,96. 12 ' 4,325. 12 0,407
@$ * C * AA + $ * C * 5 + 0,407 2,035 B
Perhitungan daya rangkaian sensitivitas menggunakan resistansi LDR saat kondisi terang
dan resistansi potensio sebesar 4,325k Ohm (sesuai hasil perhitungan teoritis). Karena
dihubungkan ke-sepuluh komparator maka daya total rangkaian sensitivitas cahaya adalah:
@$ * C * *)* > 10 + @$ * C * 20,35 B
Daya rangkaian penerima :
(D* E
::
(' &
5
16. 12 ' 16. 12 0,15625
(D* F
:: 1. 12 ' 3. 12
5
1. 12 ' 3. 12 1,25
*)* > (D* E' (D* F 0,15625 ' 1,25 1,40625
Sehingga daya yang dikonsumsi oleh rangkaian penerima saat menerima sinyal dari loker
@($ $# AA' *)* > 5 + 1,40625 7,03125 B
Perhitungan daya rangkaian penerima menggunakan resistansi LDR saat menerima cahaya
dari indikator pada loker yaitu 16k Ohm
Daya mikrokontroller:
@ G#) AA + AA 25 + 5 125 B
Icc didapat dari datasheet (terlampir), yaitu arus saat kondisi aktif pada frekuensi 12MHz.
Daya pada satu motor saat aktif:
@ )*)# AA + )*)# 5 + 105 525 B
Dengan Imotor adalah arus yang diserap beban saat berbeban = 105m A (datasheet). Pada
sistem kerja robot, hanya dua motor yang dimungkinkan aktif bersamaan sehingga daya
yang akan diserap adalah
@< )*)# 2 + @ )*)# 2 + 525 B 1050 B
Tabel 3.6 adalah tabel nilai daya hasil perhitungan teoritis secara keseluruhan.
Tabel 3.6 Besar Daya Hasil Perhitungan Teoritis
Rangkaian Daya hasil perhitungan
Sensor Jalur 113,15m W
Penghasil tegangan referensi 20,35m W
Penerima 7,03m W
Mikrokontroller 125m W
Dari hasil perhitungan daya pada tabel 3.6 maka baterai yang akan digunakan untuk
rangkaian sensor jalur, penghasil tegangan referensi, penerima, dan mikrokontroler harus
memiliki kemampuan daya diatas 265,53m W. Sedangkan baterai untuk catu daya motor
harus memiliki kemampuan daya diatas 1050m W.
3.7.2.Pengukuran Berat
Dari hasil pengukuran berat diketahui berat masing – masing rangkaian / alat sebagai berikut
pada tabel 3.7.
Tabel 3.7 Bera