i LAPORAN PENELITIAN MANDIRI
DESAIN KONTROLER LQG/LTR PADA
SISTEM KENDALI TEGANGAN KELUARAN BUCK CONVERTER
Oleh:
ASNIL , S.Pd., M.Eng IRMA HUSNAINI. ST., MT
Dr. RIDWAN. M.Sc.,Ed
FAKULTAS TEKNIK UNIVERSITAS NEGERI PADANG
2014
ii HALAMAN PENGESAHAN PENELITIAN DOSEN MANDIRI
1. Judul Penelitian : Desain kontroler LQR/LTR pada Sistem Kendali Tegangan Keluaran Buck Converter 2. Bidang Penelitian : Sains Teknologi dan Rekayasa.
3. Ketua Peneliti
a. Nama Lengkap : Asnil, S.Pd., M.Eng b. Jenis Kelamin : Laki-laki
c. NIDN/NIP : 0007108102/19811007 200604 1 001 d. Disiplin ilmu : Sistem Tenaga Listrik
e. Pangkat/Golongan : Penata /III.c
f. Jabatan : Lektor
g. Fakultas/Jurusan : Teknik /Elektro
h. Alamat : Jln. Prof.Dr. Hamka Kampus Air Tawar Padang i. Telpon/Faks/E-mail : (0751)445998/Fax(0751) 705644
j. Alamat Rumah : Komplek PLB UNP-Limau Manis. Padang k. Telpon/Faks/E-mail : 081363280939/ [email protected] 4. Jumlah Anggota Peneliti : 2
Nama Anggota : 1. Irma Husnaini,ST.MT 2 Dr. Ridwan.M.Sc.,Ed
5. Lokasi Penelitian : Lab. Sistem Kontrol &Instrumen Jurusan Teknik Elektro UNP
6. Jumlah biaya penelitian
-Padang, 12 Desember 2014
Diketahui Oleh Ketua Peneliti
Dekan FT-UNP
Prof. Ganefri, M.Pd., Ph.D Asnil, S.Pd., M.Eng
NIP. 19631217 198903 1 003 NIP. 19811007 200604 1 001
Menyetujui, Ketua Lembaga Penelitian Universitas Negeri Padang
iii RINGKASAN
Penelitian ini bertujuan untuk pengendalian tegangan keluaran buck converter agar tetap stabil dalam keadaan perubahan beban. Kontroler LQG/LTR digunakan dalam penelitian ini untuk menghasilan performansi sistem yang bagus dan menjamin robustness dalam closed loop sistem ketika adanya gangguan. Pada penelitian ini kontroler LQG/LTR diharapkan mampu untuk mengontrol tegangan keluaran dari buck converter agar tetap stabil meskipun terjadi perubahan beban. Hasil penelitian menunjukkan penggunaan kontroler LQG/LTR telah mampu menghasilkan tegangan sebesar 5V dengan tegangan input sebesar 12 V , dengan meningkatkan margin penguatan dan phasa margin konstan sebesar 127 derajat. Sedangkan waktu untuk mencapai kestabilan sistem sekitar 0.000356 dtk dengan overshoot sebesar 20,6% pada variasi beban dari 10sampai 100 K.
*3,&39&7
:(0(43;*79*7
*8&.3.3*&7 :&)7&9.(&:8.&3
*8&.3445"7&38+*7 *(4;*7=
:18*%.)9-4):1&9.43
":/:&3*3*1.9.&3
4397.':8.*3*1.9.&3
*&1.8&8.*2*(&-&3&8&1&-
-&1&=&0!&8&7&3)&3!97&9*,.8
*94)**3*7&5&3"!
!9:).:89&0&
#2:2
*7&3(&3,&3 &3,0&.&3:(043;*79*7
$!#!
*8.25:1&3
!&7&3
&2'&7 "45414,.':(0(43;*79*7
&2'&7 .3&2.0 7*,:1&947 )*3,&3 2*3,,:3&0&3 4'8*7;*7 )&3+:1189&9*+**)'&(0
&2'&7 *39:0,*142'&3,049&0:18*)*3,&3043).8.-.,-;419)&314<;419
&2'&7 !.3=&1 *+*7*38.
&2'&7 !.3=&17*+*7*38.)&3%
&2'&7 .&,7&2 '140 7&3(&3,&3 8.89*2 0*3)&1. 9*,&3,&3 0*1:&7&3':(0(43;*79*7
&2'&7 *854397&38.*398.89*2
&2'&7 &3,0&.&3':(0(43;*79*7
&2'&7 7&+.0 7*8543 7&3,0&.&3 ':(0 (43;*79*7 )*3,&3 '*'&3 >
&2'&7 &2'&7 7*8543 89*5 7&3,0&.&3 '4)* ).&,7&2 1445 9*79:9:5 )*3,&3 (4397411*7 " )*3,&3 6 ,7&+.0 7*8543 89*5 7&3,0&.&3 )*3,&3 (4397411*7
" )*3,&3 6 )&3 4)* ).&,7&2 1445
9*79:9:5)*3,&3(4397411*7 " )*3,&36
1 BAB I
PENDAHULUAN 1.1. Pengantar
Seiring dengan perkembangan dan kemajuan teknologi, peningkatan terhadap kebutuhan konverter daya dengan kinerja dinamik yang tinggi dalam banyak aplikasi sangat dirasakan terutama di industri dan penggunaan barang-barang elektronik. DC-dc konverter merupakan salah satu contohnya, dimana konverter ini bisa menghasilkan tegangan atau arus yang dapat diatur sesuai dengan keinginan yang berasal dari power supply atau baterey. Buck konverter merupakan rangkaian elektronika daya yang berfungsi menurunkan tegangan dc menjadi tegangan dc lain sesuai kebutuhan. Pemilihan konverter dc-dc dikarenakan efisiensinya yang tinggi dalam perubahan daya input ke daya output. Diantara beberapa kriteria kinerja dinamik yang sangat penting untuk dipertimbangkan adalah riak, tegangan output, dan waktu recovery. Keuntungan pada konfigurasi Buck antara lain adalah efisiensi yang tinggi, rangkaiannya sederhana, tidak memerlukan transformer, riak (ripple) pada tegangan keluaran yang rendah sehingga penyaring atau filter yang dibutuhkan pun relatif kecil.
Kekurangan dari konfigurasibuck konverteradalah hanya satu keluaran yang dihasilkan, dan tingkat ripple yang tinggi pada arus masukan. Umumnya tegangan output berubah berdasarkan variasi beban atau akibat perubahan tegangan input. Perubahan nilai tegangan output tergantung pada filter induktor dan nilai kapasitor dalam rangkaian dan frekuensi switching serta algoritma kontroler. Jika induktor, kapasitor dan frekuensi switching tetap, perbedaan algoritma kontroler menghasilkan perbedaan respon dinamik. Beberapa hal harus dilakukan untuk memperbaiki respon dinamik tersebut. Oleh karena itu sangat penting menentukan kemungkinan kinerja dinamik terbaik untuk konverter daya. Untuk memperbaiki kinerja sistem dibawah variasi beban diperlukan kontroler.
3 BAB II
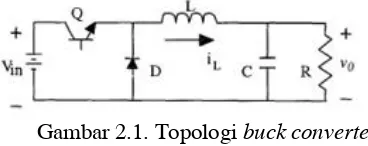
TINJAUAN PUSTAKA 2.1. Buck converter
Buck converter merupakan jenis konverter yang banyak digunakan dalam industri, khususnya mengenai catu daya. Konverter ini mengkonversikan tegangan dc menjadi tegangan dc lain yang lebih rendah (Tegangan input lebih besar dari pada tegangan output). Buck converterterdiri ari satu saklar aktif (mosfet) dan satu saklar pasif (dioda). Untuk tegangan kerja yang rendah, saklar pasif sering diganti dengan saklar aktif sehingga susut daya yang terjadi bisa dikurangi. Kedua saklar ini bekerja bergantian. Setiap saat hanya ada satu saklar yang menutup. Nilai rata-rata tegangan keluaran konverter sebanding dengan rasio antara waktu penutupan saklar aktif terhadap periode pensaklarannya (faktor kerja).
Nilai faktor kerja bisa diubah dari nol sampai satu. Akibatnya, nilai rata-rata tegangan keluaran selalu lebih rendah dibanding tegangan masukannya. Buck converterbisa disusun paralel untuk menghasilkan arus keluaran yang lebih besar. Jika sinyal ON-OFF masing-masing konverter berbeda sudut satu sama lainnya sebesar 3600/N, yang mana N menyatakan jumlah konverter, maka didapat konverter dc-dc N-fasa.buck converter multi fasa juga banyak dipakai dalam indusri logam yang memerlukan arus dc yang sangat besar pada tegangan yang rendah.
Gambar 2.1. Topologibuck converter
4
dan ketika saklar OFF diperoleh persamaan berikut;
1
Sebagai dasar model buck converter terdiri dari dua fungsi alih, model pertama mempengaruhi duty cycle pada output, Gvd(s), dan model kedua mempengaruhi tegangan pada output, Gvg(s). Bentuk umum fungsi alih sebagai berikut; 2.2. Desain Linier Quadratic Gausian
Perancangan LQG merupakan gabungan LQR dengan full state feedback dan filter Kalman. Keuntungan perancangan LQG adalah struktur kompensator secara otomatis diberikan oleh prosedur sebagai berikut.
Plant dan output ditulis,
5 Full state feedback kontrol:
r kx
u ... (7) State feedback gain k dipilih dengan menggunakan LQR
jika persamaan (7) disubsitusikan pada persamaan (6) closed loop sistem menjadi Gw Desain full state feedback menarik karena jika kondisi reachable dan observabledipenuhi cloosed loop sistem dijamin stabil. Pole –pole dapat diletakkan sembarang sesuai yang diinginkan , tetapi hal ini tidak dapat diaplikasikan jika state tidak ada. Untuk observer atau filter Kalman berlaku
Ly
Penguatan L dipilih dengan beberapa teknik untuk memberikan perkiraan )
( ˆ t
x yang stabil. Penguatan ditentukn dengan menyelesaikan persamaan filter ARE . Karena semua state tidak dapat diukur dan kontrol tidak dapat diaplikasikan dalam praktek, kita menggunakan feedback estimasi xˆ(t) termasuk aktual state
) (t
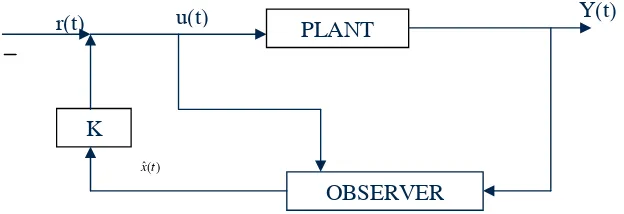
x sehingga: ukxˆr. Struktur cloosed loop dengan menggunakan kontroller ini ditunjukkan pada gambar 2.
Pada perancangan feedback penguatan K dan observer penguatan L digunakan beberapa teknik sehingga memenuhi (ABK) dan (ALC). Dalam desain LQG, K dipilih denngan menggunakan LQR ARE sedangkan L dipilih dengan menggunakan filter Kalman ARE. State feedback K dan observer penguatan L dapat didesain dengan separation principle (pemisahan perancangan ) menurut persamaan berikut ini:
Desain LQR state feedback ditulis,
PLANT
6
dimanaQcdanRc adalah matrik bobot
Desain gain Kalman filter ditulis
CP
dimana QfdanRf adalah matrik noise spektral density
sehingga LQG dinamik regulator ditulis )
2.3. Desain Loop Transfer Recovery
Dalam situasi aktual plant dinamik tepatnya tidak diketahui, boleh jadi ada gangguan dan pengukuran noise dalam sistem. Dalam bagian ini kita akan menunjukkan bagaimana matrik Qc , Rc , Qf dan Rf dipilih untuk menjamin
robustness dalam closed loop sistem. Pendekatan dalam mendesain matrik ini adalah dengan menggunakan linier quadratic gausian/loop transfer recovery (LGQ/LTR).
State feedback penguatan K dihitung dengan menggunakan LQR ARE dalam persamaan (11). Pada bagian ini kita asumsikan bahwa state feedback penguatan K sudah ditentukan menggunakan LQR ARE , penguatan K ini menghasilkan sifat robustness KφB. KφBmerupakan target feedback loop untuk loop gain recovery pada input. Penguatan K harus dipilih untuk karakteristik sistem yang sesuai. Kemudian dilakukan desain filter Kalman sehingga menemukan kembali sifat jaminan robustness full state feedback kontrol dengan mendesain parameter v0.
JaminanRobustnessLQR terhadap gain margin dan phasa margin adalah:
a. gain margin infinity
b. phasa margin60
7 a. LQG dinamik regulator
Ly
b. Algoritma 1:LQG/LTR pada input
Desain LQR State Feedback untuk target feedback loop KφB S
Desain Kalman Filter Gain untuk LTR CP
c. Algoritma 2:LQG/LTR pada ouput Desain Gain Kalman Filter untuk LTR
CP
Desain LQR State Feedback untuk target feedback loop cφL S
2.4. Pulse Width Modulation (PWM)
8 sinyal, prosentase duty cycle akan berbanding lurus dengan tegangan rata-rata yang dihasilkan.
Pengaturan modulasi lebar pulsa atau PWM merupakan suatu teknik yang ampuh dalam sitem kendali (control system) saat ini. Pengaturan lebar pulsa ini dapat digunakan di berbagai bidang, diataranya untuk kendali kecepatan (speed control), kendali system tenaga (power control), dan pengukuran atau instrumentasi dan telekomunikasi (measurement andtelecomunication).
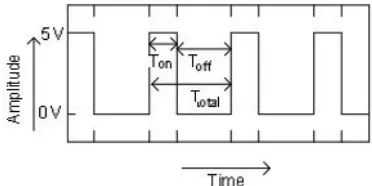
Modulasi lebar pulsa diperoleh dengan bantuan sebuah gelombang kotak, dimana siklus kerja (duty cycle) dapat diubah-ubah untuk mendapatkan sebuah tegangan keluaran yang bervariasi yang merupakan nilai rata-rata dari gelombang tersebut.
Gambar 2.3. Bentuk gelombang kotak (pulse) dengan kondisi high 5 volt dan low 0 volt.
Ton adalah durasi dimana tegangan keluaran berada pada posisi high dan
Toff adalah durasi dimana tegangan keluaran berada pada posisi low. Sedangkan
Ttotal adalah jumlah dari Ton + Toff yang biasa dikenal dengan periode satu
gelombang. Siklus keja atau duty cycle sebuah gelombang didefinisikan sebagai
....……….…..(29) sedangkan untuk tegangan keluaran dapat dirumuskan sebagai berikut
…..……….(30)
Dari rumus di atas, dapat disimpulkan bahwa tegangan keluaran dapat dirubah dengan merubah nilai Ton.
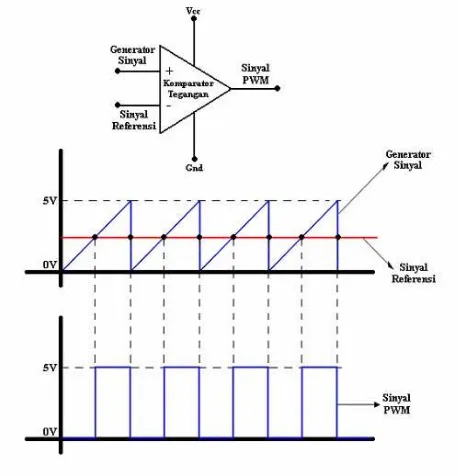
9 refernsi yang merupakan sinyal tegangan dc yang dikonversi oleh sinyal gergaji dan menghasilkan sinyal kotak.
Gambar 2.4. Sinyal referensi
Untuk membangkitkan sinyal PWM, digunakan komparator untuk membandingkan dua buah sinyal masukan, yaitu generator sinyal dan sinyal referensi. Hasil keluaran dari komparator adalah sinyal PWM yang berupa pulsa persegi yang berulang-ulang. Durasi atau lebar pulsa dapat dimodulasi dengan cara mengubah sinyal referensi.
Gambar 2.5. Sinyal referensi dan PWM
10 ………... (31)
Dengan kata lain, semakian besar lebar durasi waktu tunda posistif (Ton) dari sinyal
11 BAB III
TUJUAN PENELITIAN DAN KONTRIBUSI PENELITIAN 3.1. Tujuan Penelitian:
1. Merancang rangkaianbuck converter beserta kontroler LQG/LTR
2. Mensimulasikan hasil rancangan rangkaian buck converter tanpa menggunakan kontroler dan menggunakan kontroler LQG/LTR berdasarkan perubahan beban Hasil penelitian ini dipublikasikan dalam jurnal lokal yang mempunyai ISSN .
3.2. Kontribusi Penelitian,
1. Rangkaian buck converter yang dihasilkan dapat digunakan sebagai sumber tegangan konstan sebesar 5 Volt
12 BAB IV
METODE PENELITIAN
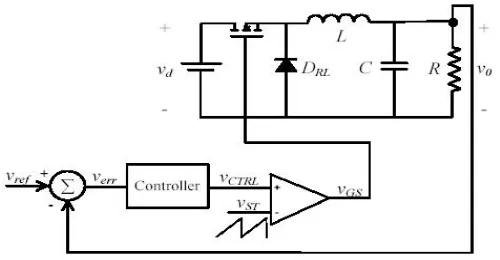
Penelitian ini dilaksanakan dengan metode eksperimen di laboratorium instrumentasi dan kontrol FT-UNP dalam jangka waktu selama 6 bulan. Prosedur penelitian yang dilakukan berdasarkan rancangan rangkaian pada diagram balok dibawah ini.
Gambar 4.1. Diagram blok rancangan sistem kendali tegangan keluaran Buck converter
Realisasi rancangan penelitian yang diperagakan pada Gambar 4.1 dilakukan dengan beberapa tahap, yaitu :
4.1. Studi Pustaka
Studi pustaka bertujuan untuk mendapatkan informasi yang diperlukan dalam mewujudkan penelitian yang telah dirancang, diantaranya :
a. Studi pustaka tentang teknik perancangan rangkaianbuck converter b. Studi pustaka tentang teknik PWM.
c. Studi pustaka tentang perancangan dan penerapan kontroler LQG/LTR
4.2. Perancangan Perangkat Lunak
Perangkat lunak (program ) pada penelitian ini menggunakan matlab . Matlab digunakan untuk merancang rangkaian dan melihat respon buck converter hasil rancangan tanpa kontroler dan setelah menggunakan kontroler LQG/LTR.
13 tersebut. Pengujian dilakukan untuk melihat kinerja sistem kendali tegangan keluaran buck converter . Pengujian rangkaian dilakukan dengan memberikan beban yang berubah-rubah pada keluaranbuck convertertanpa menggunakan kontroler LQG/LTR serta dengan menggunakan kontroler LQG/LTR. Data hasil pengujian rangkaian berupa besarnya tegangan keluaran buck converter tanpa kontroler LQG/LTR serta dengankontroler LQG/LTR.
Analisis data pada penelitian ini dilakukan dengan membandingkan tegangan keluaran buck converter tanpa tanpa kontroler LQG/LTR serta dengankontroler LQG/LTR., analisis juga dilakukan terhadap grafik respon sistem . Adapun analisis terhadap grafik respon yang diperoleh dilakukan sebagai berikut:
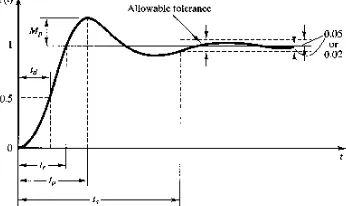
a. Menganalisis respon transien sistem dan kestabilan margin sistem
Gambar 4.2 menunjukkan beberapa parameter respon transien sistem yang dapat diuji pada penelitian ini.
Gambar 4.2. Respon transien sistem
14 BAB V
HASIL DAN PEMBAHASAN 5.1. Umum
Bab ini membahas unjuk kerja hasil perancangan dan simulasi rangkaian buck converter tanpa kontroler LQG/LTR serta dengan kontroler LQG/LTR. Agar hal tersebut dapat dilakukan dengan baik, maka perlu dilakukan pengujian terhadap tegangan keluaran buck converter dengan variasi beban.
5.2. Perancangan rangkaian buck converter
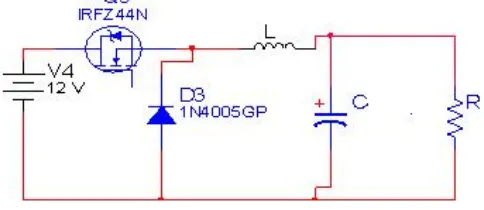
Spesifikasi rancangan rangkaianbuck converteryang diinginkan adalah sebagai berikut , R=10Ω - 100 KΩ
L= 1mH C=2200uF Fs=50KHz D=5/12 Vin=12v Vout=5v
Gambar 5.1. memperlihatkan hasil perancangan rangkaianbuck converter.
5.1. Rangkaian buck converer
15
+$"2%0"$ 1%#+$%&"20"$ 1%#
0%/3%,#50"$ 1%#
(a) (b)
5.2. Grafik respon rangkaian buck converer dengan beban 10 (a) Respon step (b) Bode diagram
Berdasarkan gambar 5.2. dapat dilihat bahwa tegangan keluaran buck converter tanpa kontroler belum memenuhi kriteria yang diinginkan sebesar 5 volt, disamping itu juga pada respon keluaran sistem terdapat overshoot sekitar 89,9% dan dengan settling time 0,168 dtk. Bode diagram sistem menunjukkan gain margin sebesar 192 dB, dengan phasa margin yang rendah sebesar 11,1derajat. Untuk memperbaiki kinerja sistem dilakukan perancangan kontroler LQG/LTR. Adapun kinerja rangkaianbuck converter hasil rancangan setelah menggunakan kontroler LQG/LTR dapat dilihat dari hasil simulasi berikut ini dengan memvariasikan nilai q(1,10,102, 103,106). Berikut hasil simulasi rangkaian
buck converter dengan kontroler LQG/LTR untuk q = 1 dan q = 106.
2%.%1.-,1%
512%+3,2(2*%$%")"+.*(23$% 4%01'--2
+$"2%0"$ 1%#+$%&"2%0"$ 1%#
16
512%+3,2(2*%$%")"+.*(23$% 4%01'--2
+$"2%0"$ 1%#+$%&"2%0"$ 1%#
0%/3%,#50"$ 1%#
(c) (d)
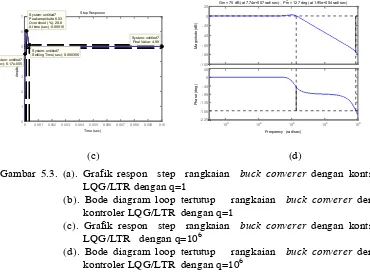
Gambar 5.3. (a). Grafik respon step rangkaian buck converer dengan kontroler LQG/LTR dengan q=1
(b). Bode diagram loop tertutup rangkaian buck converer dengan kontroler LQG/LTR dengan q=1
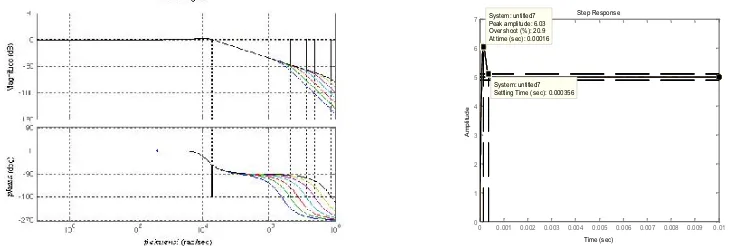
(c). Grafik respon step rangkaian buck converer dengan kontroler LQG/LTR dengan q=106
(d). Bode diagram loop tertutup rangkaian buck converer dengan kontroler LQG/LTR dengan q=106
17 Tabel 1. Hasil Pengujian tegangan keluaran buck converter
No q Tegangan
(V) Overshoot(%)
Settling
time(detik) Gain margin
Phasa
8 ≥107 5 20,9 0,000356 infinity 127
Berdasarkan hasil pengujian dapat dilihat bahwa tegangan keluaran buck converter tetap stabil sebesar 5 V untuk beban 10 sampai 100K dengan overshoot dan settling time masing –masing sebesar 20,6 % dan 0,000356 detik. Sedangkan kestabilan gain margin meningkat dari 45 sampai tak berhingga dengan variasi nilai q(1,10,102,103,104,105,106, ≥107), hal ini menunjukkan kontroler LQG/LTR mampu meningkatkan kestabilan margin dan menjaga performansi robustness. Gambar 6.4 memperlihatkan bode diagram dan respon step loop tertutup rangkaian buck convererdengan kontroler LQG/LTR berdasarkan variasi nilai q.
2%.%1.-,1% 512%+3,2(2*%$%")"+.*(23$%
4%01'--2 22(+%1%#
512%+3,2(2*%$ %22*(,& (+%1%#
19 BAB VI
KESIMPULAN DAN SARAN
Serangkaian aktifitas dalam penelitian ini secara keseluruhan dapat mencapai tujuan penelitian yang telah direncanakan. Dari hasil dan bahasan yang telah dikemukakan maka
6.1. Kesimpulan
Berdasarkan tujuan penelitian, maka dapat tulis beberapa kesimpulan sebagai berikut:
1. Hasil rancangan rangkaian buck converter beserta kontroler LQG/LTR diperoleh spesifikasi tegangan keluaran buck converter sebesar 5 Volt dengan tegangan input sebesar 12 V.
2. Simulasi terhadap hasil rancangan rangkaian buck converter ,diperoleh tegangan keluaran buck converter tanpa kontroler LQG/LTR belum memenuhi kriteria yang diinginkan sebesar 5 volt, dengan settling time sebesar 0,168 dtk dan overshoot sekitar 89,9%. Hasil simulasi juga menunjukkan meskipun gain margin besar tetapi phasa margin rendah dan memenuhi kriteria yang diingikan yaitu > 60 derajat. .
3. Dari hasil ujicoba rangkaian buck converter dengan kontroler LQG/LTR untuk beban 10- 100 K telah mampu menjaga kestabilan tegangan keluaran buck converter sebesar 5 V dengan overshoot sebesar 20,6 % dan settling time sebesar 0,000356 dtk , peningkatan juga terjadi pada gain margin yang dengan phasa margin tetap sebesar 127 derajat. Hal ini menunjukkan kontroler LQG/LTR mampu menjaga performansirobustness.
6.2. Saran
20 DAFTAR PUSTAKA
Chen, Xu. Advanced Control Systems II (ME233),Spring 2013 Fujita , Masayuki . Robust and Optimal Control, 05th. Spring, 2013
Kasat, Saurabh.Analysis , Design and Modeling of DC-DC Converter Using Simulink. Bachelor of Engineering Institute of Engineering and Technology Indore, Madhya Pradesh State India. 2004
Prodic, Aleksandar.Design of High Frequenci Switch Mode Power Supplies (SMPS). Spring.2005
Qiao, Michael, Parviz Parto and Reza Amirani. Stabilize The buck Converter with Transkonduktansi Amplifier.International Rectifier. 2002.
Tymerski, Richard and Frank Rytkonen:Control System Design