BAB 2
LANDASAN TEORI
2.1 Sensor
Sensor adalah suatu alat atau rangkaian alat yang dipakai untuk merubah
suatu besaran tertentu menjadi besaran lain dengan cara “merasakan / mendeteksi”
dalam bahasa inggris disebut to sense, artinya jika pada suatu ketika ada sesuatu
atau benda yang lewat pada jangkauannya (terukur) maka sensor akan
merasakan/mendeteksi sesuatu tersebut tanpa harus mengetahui benda apa yang
melewatinya. Kemudian setelah merasakan atau mendeteksi maka hasilnya
dikirim ke rangkaian selanjutnya untuk dijadikan suatu referansi masukan pada
rangkaian tersebut. Secara umum sistem kerja sensor mirip dengan kerrjanya
suatu switch pada kondisi NO/NC dan Common.
Sensor dipakai atau dibutuhkan suatu masukan tertentu yang terukur dan
sudah didesain aplikasinya sesuai dengan kebutuhan. Tegangan kerja sensor pada
umumnya adalah 5-30 V dan level keluarannya 5-30 VDC, tegangan keluaran ini
biasanya masih berupa signal analog yang akan diubah menjadi signal digital
dengan rangkaian elektronik tertentu contohnya ADC (analog to digital
converter).
2.1.1 Infra Merah
Sensor infra merah yaitu sebuah sensor yang menggunakan media cahaya,
dalam suatu rangkaian biasanya berisi pembangkit cahaya (transmitter) LED dan
penerima cahaya (receiver). Sensor pada transistor biasanya adalah
commonemitor, ada yang dengan cara LOS (Line On Sight) melihat langsung, ada
juga yang menggunakan pemantul (reflector) relative opto switch. Ada juga yang
menggunakan phototransistor sebagai transmitter dan monitor sebagai
receivernya. Tipe sensor infra merah yang digunakan adalah dengan
photodioda. Cahaya infra merah termasuk dalam gelombang elektromagnetik
yang tidak tampak oleh mata telanjang. Sinar ini tidak tampak oleh mata karena
mempunyai panjang gelombang, berkas cahaya yang terelalu pajang bagi
tanggapan mata manusia. Sinar infra merah mempunyai daerah frekuensi 1 x 1012
Hz sampai dengan 1 x 101 sampai dengan 1 x 1014 GHz atau daerah frekuennsi
dengan panjang gelombang 1µm – 1 mm. LED infra merah ini merupakan
komponen elektronika yang memancarkan cahaya infra merah dengan konsumsi
daya sangat kecil.
2.1.1.1 Modul Inframerah (IRM)
Sensor penerima IRM ini bekerja dengan menangkap sinar yang dihasilkan
dari pancaran sinar infra merah pasif yang dimiliki pemancar infra merah. Seperti
remote control Sony, yang merupakan pemancar sinar inframerah. Pancaran sinar
inframerah inilah yang kemudian ditangkap oleh Pyroelectric sensor yang
merupakan inti dari sensor PIR ini sehingga menyebabkan Pyroelectic sensor
yang terdiri dari galium nitrida, caesium nitrat dan litium tantalate menghasilkan
arus listrik. Mengapa bisa menghasilkan arus listrik? Karena pancaran sinar infra
merah pasif ini membawa energi panas. Prosesnya hampir sama seperti arus listrik
yang terbentuk ketika sinar matahari mengenai solar cell. Mengapa sensor IR
hanya bereaksi pada tubuh manusia saja? Hal ini disebabkan karena adanya IR
Filter yang menyaring panjang gelombang sinar infra merah pasif.
IR Filter dimodul sensor IRM ini mampu menyaring panjang gelombang
sinar inframerah pasif antara 8 sampai 14 mikrometer, sehingga panjang
gelombang yang dihasilkan dari tubuh manusia yang berkisar antara 9 sampai 10
mikrometer ini saja yang dapat dideteksi oleh sensor.Jadi, ketika seseorang
berjalan melewati sensor, sensor akan menangkap pancaran sinar inframerah pasif
yang dipancarkan oleh tubuh manusia yang memiliki suhu yang berbeda dari
lingkungan sehingga menyebabkan material pyroelectric bereaksi menghasilkan
arus listrik karena adanya energi panas yang dibawa oleh sinar inframerah pasif
tersebut. Kemudian sebuah sirkuit amplifier yang ada menguatkan arus tersebut
Ketika manusia berada di depan sensor PIR dengan kondisi diam, maka
sensor PIR akan menghitung panjang gelombang yang dihasilkan oleh tubuh
manusia tersebut. Panjang gelombang yang konstan ini menyebabkan energi
panas yang dihasilkan dapat digambarkan hampir sama pada kondisi lingkungan
disekitarnya. Ketika manusia itu melakukan gerakan, maka tubuh manusia itu
akan menghasilkam pancaran sinar inframerah pasif dengan panjang gelombang
yang bervariasi sehingga menghasilkan panas berbeda yang menyebabkan sensor
merespon dengan cara menghasilkan arus pada material Pyroelectricnya dengan
besaran yang berbeda-beda. Karena besaran yang berbeda inilah comparator
menghasilkan output.
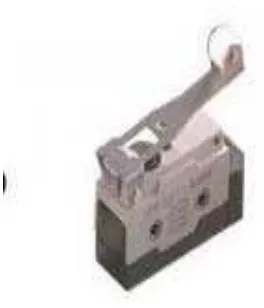
2.1.2 Sensor Posisi (limit switch)
Limit switch merupakan jenis saklar yang dilengkapi dengan katup yang
berfungsi menggantikan tombol. Prinsip kerja limit switch sama seperti saklar
Push ON yaitu hanya akan menghubung pada saat katupnya ditekan pada batas
penekanan tertentu yang telah ditentukan dan akan memutus saat katup tidak
ditekan. Limit switch termasuk dalam kategori sensor mekanis yaitu sensor yang
akan memberikan perubahan elektrik saat terjadi perubahan mekanik pada sensor
tersebut. Penerapan dari limit switch adalah sebagai sensor posisi suatu benda
(objek) yang bergerak. Simbol limit switch ditunjukan pada gambar berikut
Gambar 2.1 . Bentuk fisik Limit Switch
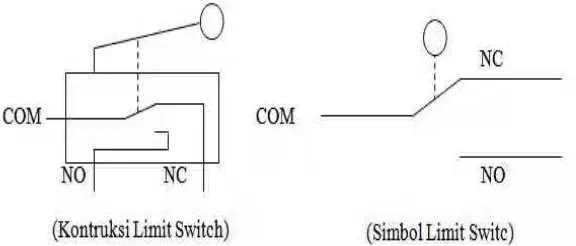
Limit switch umumnya digunakan untuk : Memutuskan dan
daya yang besar, dengan sarana yang kecil. Sebagai sensor posisi atau kondisi
suatu objek. Prinsip kerja limit switch diaktifkan dengan penekanan pada
tombolnya pada batas/daerah yang telah ditentukan sebelumnya sehingga terjadi
pemutusan atau penghubungan rangkaian dari rangkaian tersebut. Limit switch
memiliki 2 kontak yaitu NO (Normally Open) dan kontak NC (Normally Close)
dimana salah satu kontak akan aktif jika tombolnya tertekan.Konstruksi dan
simbol limit switch dapat dilihat seperti gambar di bawah:
Gambar 2.2 Konstruksi dan simbol limit switch
2.2. Motor Arus Searah
Motor arus searah adalah suatu mesin yang berfungsi mengubah energi
listrik menjadi energi mekanik, dimana energi gerak tersebut berupa putaran dari
motor. Ditinjau dari segi sumber arus penguat magnetnya, motor arus searah dapat
dibedakan atas :
1. Motor arus searah penguatan terpisah, bila arus penguat medan rotor dan medan
stator diperoleh dari luar motor.
2. Motor arus searah penguatan sendiri, bila arus penguat magnet berasal dari
motor itu sendiri.Motor arus searah dapat diklasifikasi sebagai berikut :
1. Motor arus searah penguatan shunt
2. Motor arus searah penguatan seri.
3. Motor arus searah kompon panjang.
a. Motor arus searah kompon panjang kumulatif.
4. Motor arus searah kompon pendek
a. Motor arus searah kompon pendek kumulatif.
b. Motor arus searah kompon pendek diferensial
2.2.1. Motor DC
Motor DC merupakan sebuah perangkat elektromagnetis yang mengubah
energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk
misalnya memutar impeller pompa, fan atau blower, menggerakan kompresor,
mengangkat bahan, dll. Motor listrik digunakan juga di rumah seperti: mixer, bor
listrik,fan,angin.
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang
tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan
mengatur:
a. Tegangan dinamo
Meningkatkan tegangan dinamo akan meningkatkan kecepatan
b. Arus medan
Menurunkan arus medan akan meningkatkan kecepatan. Motor arus searah,
sebagaimana namanya, menggunakan arus langsung yang tidak
langsung/direct-unidirectional. Motor DC digunaksan pada penggunaan khusus dimana diperlukan
penyalaan torque yang tinggi atau percepatan yang tetap untuk kisaran kecepatan
yang luas.
2.2.1.1. Prinsip Mesin DC
Menggunakan prinsip hukum Faraday dan gaya Lorentz.
1. Beroperasi sebagai motor.
Beban mekanik dihubungkan dengan batang bergerak.Kemudian batang
melambat perlahan dan menghasilkan pengurangan Tegangan terindukasi. Arus
searah jarum jam sirkuit menghasilkan gaya induksi magnetic ke kanan. Sistem
teresbut bergerak dalam kecepatan konstan.
2. Beroperasi sebagai generator.
Asumsikan batang dalam kecepatan konstan dan arus nol. Kemudian,gaya
teraplikasi menarik batang lebih cepat ke kanan, kecepatan batang
meningkat,tegangan yang terinduksi melampaui sumber tegangan, dan arus
bersirkulasi melawan arah jarum jam.Karena arus memiliki arus terbalik, gaya
terinduksi batang di medan berkebalikan dan berada di kiri. Kecepatan batang
menstabilkan dengan menarik gaya sama dengan gaya terinduksi.
Kemudian,tegangan terinduksi mengirimkan daya sebagian ke resistansi dan
sisanya ke baterai. Lalu, energy mekanik berubah menjadi energy listrik dan
muncul sebagai loss di resistansi atau energy kimia tersimpan dalam baterai.
2.2.1.2 Kontruksi Motor Arus Searah
Secara umum motor arus searah memiliki konstruksi yang sama, terbagi
atas dua bagian yaitu bagian yang diam disebut stator dan bagian yang
bergerak/berputar disebut rotor.
1. Badan motor ( rangka ).
Rangka ( frame atau yoke ) mesin arus searah seperti juga mesin-mesin
listriklainnya secara umum memiliki dua fungsi, yaitu :
1. Merupakan sarana pendukung mekanik untuk mesin secara keseluruhan.
2. Untuk membawa fluks magnetik yang dihasilkan oleh kutub-kutub
mesin.Untuk mesin kecil, dipertimbangan harga lebih dominan daripada
beratnya,biasanya rangkanya terbuat dari besi tuang ( cast iron ), tetapi
untuk mesin-mesin besar umumnya terbuat dari baja tuang ( cast steel ) atau
untuk mengurangi rugi-rugi inti,selain itu rangka ini juga harus memiliki
permeabilitas yang tinggi disamping kuatsecara mekanik .Biasanya pada
motor terdapat papan nama ( name plate ) yang bertuliskanspesifikasi umum
atau data-data teknik dari mesin, juga terdapat kotak ujung yang merupakan
tempat-tempat ujung-ujung belitan penguat medan dan lilitan jangkar.
2. Kutub
Medan penguat atau magnet medan terdiri atas inti kutub dan sepatu
kutub.
Adapun fungsi dari sepatu kutub adalah :
1. Menyebarkan fluks pada celah udara dan juga karena merupakan bidang lebar
maka akan mengurangi reluktansi jalur magnet.
2. Sebagai pendukung secara mekanik untuk kumparan penguat atau kumparan
medan.
Inti kutub terbuat lembaran-lembaran besi tuang atau baja tuang. Sepatu
kutub dilaminasi dan dibaut atau dikeling ( rivet ) ke rangka mesin. Sebagaimana
diketahui bahwa fluks magnet yang terdapat pada motor arus searah dihasilkan
oleh kutub-kutub magnet buatan dengan prinsip elektromagnetik.
3. Inti jangkar.
Inti jangkar yang umum digunakan dalam motor arus searah adalah
berbentuk silinder yang diberi alur-alur pada permukaannya untuk tempat
melilitkan kumparan-kumparan tempat terbentuknya ggl induksi. Inti jangkar
yang terbuat dari bahan ferromanetik, dengan maksud agar komponen-komponen
(lilitan jangkar ) terletak dalam daerah yang induksi magnetnya besar, supaya ggl
induksi dapat bertambah besar. Seperti halnya inti kutub magnet maka jangkar
dibuat dari bahan-bahan berlapis-lapis tipis untuk mengurangi panas yang
terbentuk karena adanya arus linier. Bahan yang digunakan untuk jangkar ini
sejenis campuran baja silikon. Padaumumnya alur tidak hanya diisi satu kumparan
yang tersusun secara berlapis.
4. Kumparan jangkar
Kumparan jangkar pada motor arus searah berfungsi tempat terbentuknya
ggl induksi. kumparan jangkar terdiri dari :
Gambar 2.4a. Kumparan gelung
2.Kumparan gelombang.
Gambar 2.4b. Kumparan Gelombang 5. Kumparan medan
Fungsi kumparan medan ini adalah untuk membangkitkan fluksi yang
akan dipotong oleh konduktor jangkar.
6. Komutator
Fungsi komutator untuk fasilitas penghubung arus dari konduktor jangkar
,sebagai penyearah mekanik, yang bersama-sama dengan sikat membuat sesuatu
kerjasama yang disebut komutasi. Agar menghasilkan penyearah yang lebih
baik,maka komutator yang digunakan hendaknya dalam jumlah yang besar.
Dalam hal ini setiap belahan ( segmen ) komutator tidak lagi merupakan bentuk
separoh cincin, tetapi sudah berbentuk lempengan-lempengan (segmen komutator)
7. Sikat-sikat
Sikat-sikat ini berfungsi sebagai jembatan bagi aliran arus kekumparan
jangkar. Dimana permukaan sikat ditekan ke permukaan segmen komutator untuk
menyalurkan arus listrik. Besarnya tekanan pegas dapat diatursesuai dengan
keinginan.
Disamping itu sikat memegang peranan penting untuk terjadinya
komutasi. Karbon yang ada diusahakan memiliki konduktivitas yang tinggi untuk
mengurangi rugi-rugi listrik. Agar gesekan antara komutator-komutator dan sikat
tidak mengakibatkan ausnya komutator, maka sikat harus lebih lunak daripada
komutator.
2.2.2. Prinsip Kerja Motor DC
Motor DC memerlukan suplai tegangan yang searah pada kumparan
medan untuk diubah menjadi energi mekanik. Bagian utama motor DC adalah
stator dan rotor dimana kumparan medan pada motor dc disebut stator (bagian
yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar).
Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar
bebas di antara kutub-kutub magnet permanen. Catu tegangan dc dari baterai
menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang
terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambar di atas
disebut angker dinamo. Angker dinamo adalah sebutan untuk komponen yang
berputar di antara medan magnet.Agar proses perubahan energi mekanik dapat
berlangsung secara sempurna, maka tegangan sumber harus lebih besar daripada
tegangan gerak yang disebabkan reaksi lawan. Dengan memberi arus pada
kumparan jangkar yang dilindungi oleh medan maka menimbulkan perputaran
pada motor.
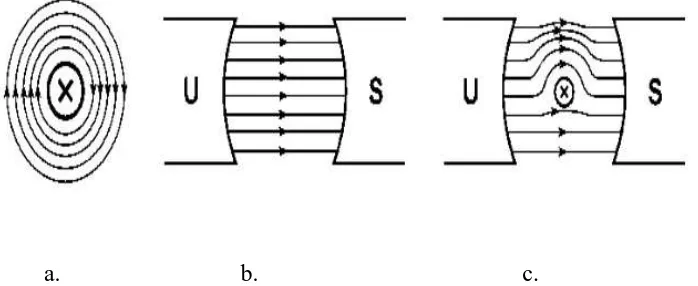
Sebuah konduktor yang dialiri arus mempunyai medan magnet
disekelilingnya. Pada saat konduktor yang dialiri arus listrik ditempatkan pada
suatu medan magnet, maka konduktor akan mengalami gaya mekanik, seperti
a. b. c.
Gambar 2.5. Pengaruh penempatan konduktor berarus dalam medan magnet
Pada Gambar 2.10.a menggambarkan sebuah konduktor yang dialiri arus
listrik menghasilkan medan magnet disekelilingnya. Arah medan magnet yang
dihasilkan oleh konduktor dapat diperoleh dengan menggunakan kaidah tangan
kanan. Kuat medan tergantung pada besarnya arus yang mengalir pada konduktor.
Sedangkan Gambar 2.10.b menunjukkan sebuah medan magnet yang diakibatkan
oleh kutub-kutub magnet utara dan selatan. Arah medan magnet adalah dari kutub
utara menuju kutub selatan. Pada saat konduktor dengan arah arus menjauhi
pembaca ditempatkan didalam medan magnet seragam, maka medan gabungannya
akan seperti yang ditunjukkan pada Gambar 2.10.c. Daerah di atas konduktor,
medan yang ditimbulkan konduktor adalah dari kiri ke kanan, atau pada arah yang
sama dengan medan utama. Sementara di bawahnya, garis-garis magnet dari
konduktor arahnya berlawanan dengan dengan medan utama. Hasilnya adalah
memperkuat medan atau menambah kerapatan fluksi di atas konduktor dan
melemahkan medan atau mengurangi kerapatan fluksi di bawah konduktor.
Dalam keadaan ini, fluksi di daerah di atas konduktor yang kerapatannya
bertambah akan mengusahakan gaya ke bawah kepada konduktor, untuk
mengurangi kerapatannya. Hal ini menyebabkan konduktor mengalami gaya
berupa dorongan ke arah bawah. Begitu juga halnya bila arah arus dalam
konduktor dibalik. Kerapatan fluksi yang berada di bawah konduktor akan
bertambah sedangkan kerapatan fluksi di atas konduktor berkurang. Sehingga
mengalirkan arus dalam medan magnet cenderung bergerak tegak lurus terhadap
medan.
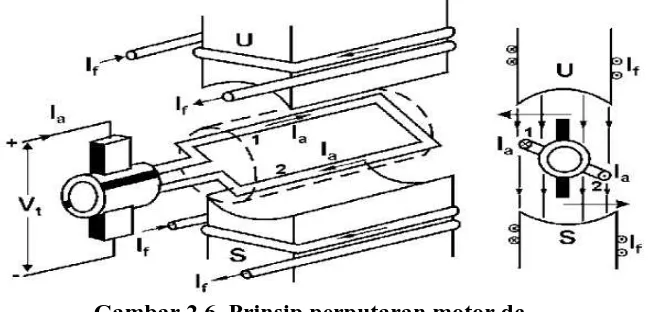
Prinsip kerja sebuah motor arus searah dapat dijelaskan dengan gambarberikut ini:
Gambar 2.6. Prinsip perputaran motor dc
Pada saat kumparan medan dihubungkan dengan sumber tegangan,
mengalir arus medan If pada kumparan medan karena rangkaian tertutup sehingga
menghasilkan fluksi magnet yang arahnya dari kutub utara menuju kutub selatan.
Selanjutnya ketika kumparan jangkar dihubungkan ke sumber tegangan, pada
kumparan jangkar mengalir arus jangkar Ia. Arus yang mengalir pada
konduktor-konduktor kumparan jangkar menimbulkan fluksi magnet yang melingkar. Fluksi
jangkar ini memotong fluksi dari kedua kutub medan, sehingga menyebabkan
perubahan kerapatan fluksi dari medan utama. Hal ini menyebabkan jangkar
mengalami gaya sehingga menimbulkan torsi. Gaya yang dihasilkan pada setiap
konduktor dari sebuah jangkar, merupakan akibat aksi gabungan medan utama
dan medan di sekeliling konduktor. Gaya yang dihasilkan berbanding lurus
dengan besar fluksi medan utama dan kuat medan di sekeliling konduktor. Medan
di sekeliling masing masing konduktor jangkar tergantung pada besarnya arus
jangkar yang mengalir pada konduktor tersebut. Arah gaya ini dapat ditentukan
dengan kaidah tangan kiri.
Gaya Lorentz adalah gaya yang ditimbulkan oleh muatan listrik yang
bergerak atau oleh arus listrik yang berada dalam suatu medan magnet (B). Arah
gaya ini akan mengikuti arah maju skrup yang diputar dari vektor arah gerak
muatan listrik (v) ke arah medan magnet (B), seperti yang terlihat dalam rumus
F = q( v x B) ...(2.1)
Sebuah partikel bermuatan listrik yang bergerak dalam daerah medan magnet
homogen akan mendapatkan gaya. Gaya ini juga dinamakan gaya Lorentz. Gerak
partikel akan menyimpang searah dengan gaya lorentz yang mempengaruhi. Arah
gaya Lorentz pada muatan yang bergerak dapat juga ditentukan dengan kaidah
tangan kanan dari gaya Lorentz (F) akibat dari arus listrik, I dalam suatu medan
magnet B. Ibu jari, menunjukan arah gaya Lorentz . Jari telunjuk, menunjukkan
arah medan magnet ( B ). Jari tengah, menunjukkan arah arus listrik ( I ). Untuk
muatan positif arah gerak searah dengan arah arus, sedang untuk muatan negatif
arah gerak berlawanan dengan arah arus.
Besarnya gaya Lorentz (F) dapat ditulis:
F = B.I.ℓ...(2.1)
Jika besar muatan q bergerak dengan kecepatan v, dan I = q/t maka persamaan
gaya adalah:
F = I . ℓ . B sin θ
= q/t . ℓ . B sin θ
= q . ℓ/t. B si0n θ
= q . v . B sin θ
Sehingga besarnya gaya Lorentz yang dialami oleh sebuah muatan yang bergerak
dalam daerah medan magnet dapat dicari dengan menggunakan rumus :
F = q . v . B sin θ...(2.1)
Sedangkan Torsi yang dihasilkan motor dapat ditentukan dengan:
T = F .r ...(2.2)
Bila torsi yang dihasilkan motor lebih besar daripada torsi beban maka motor akan
berputar. Besarnya torsi beban dapat dituliskan dengan:
T = K Φ Ia...(2.3)
K = ...(2.4)
Dimana :
T = Torsi (Nm)
r = Jari-jari rotor (Meter)
Φ = Fluksi setiap kutub I Ia = Arus jangkar (Ampere)
P= Jumlah kutubpada motor
Z = Jumlah konduktorpada motor
a = Cabang paralel
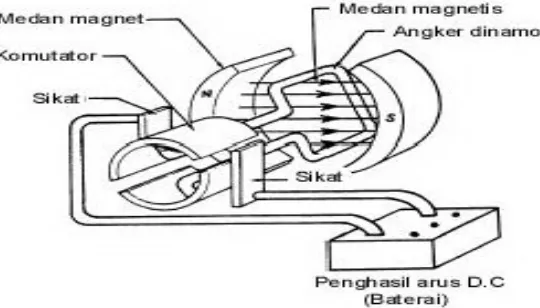
2.2.3. Komponen Utama Motor DC
Gambar 2.7. Komponen Utama Motor DC
2.2.3.1KutubMedan
Kutub medan digambarkan sebagai interaksi dua kutub magnet akan
menyebabkan perputaran pada motor DC. Motor DC memiliki kutub medan yang
stasioner dan dinamo yang menggerakan bearing pada ruang diantara kutub
medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub
selatan. Garis magnetik energi membesar melintasi bukaan diantara kutub-kutub
dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat
satu atau lebih elektromagnet. Elektromagnet menerima listrik dari sumber daya
2.2.3.2Dinamo
Bila arus masuk menuju dinamo, maka arus ini akan menjadi
elektromagnet. Dinamo yang berbentuk silinder, dihubungkan ke as penggerak
untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar
dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan
selatan magnet berganti lokasi. Jika hal ini terjadi, arusnya berbalik untuk
merubah kutub-kutub utara dan selatan dinamo.
2.2.3.3Komutator
Komutator terdapat terutama dalam motor DC. Kegunaannya adalah untuk
membalikan arah arus listrik dalam dinamo. Commutator juga membantu dalam
transmisi arus antara dinamo dan sumber daya. Selain itu komutator berfungsi
untuk menyearahkan tegangan yang dihasilkan rotor menjadi tegangan DC.
2.3 Buzzer
Rangkaian Buzzeratau yang biasa disebut sebagai rangkaian alarm
pengingat pesan dan tanda pastinya sudah sering ditemukan di beberapa perangkat
elektronik di pasar. Pada era teknologi modern ini, pastinya alarm sudah tersedia
di beberapa perangkat elektronik seperti ponsel dan juga jam memiliki alarm
sebagai tanda peringatan. Rangkaian alarm atau tanda pengingat ini sudah
menjadi salah satu penunjang penting dan tidak dapat dipisahkan di beberapa
perangkat elektronik tersebut.
Rangkaian tanda pengingat ini berfungsi untuk mendeteksi gerakan dan
juga cahaya yang bisa membantu Anda mencegah kasus pencurian. Pada skema
rangkaian buzzerini terdapat komponen penting yaitu Timer IC NE 555. Untuk
komponen R4 LDR memiliki fungsi untuk mendeteksi atau melakukan
penginderaan cahaya yang berada di sekitar ruangan di dekat rangkaian tersebut.
Manfaat utama komponen LDR ini adalah cara menerima cahaya yang masuk.
Apabila cahaya terang, tingkat resistensi dari LDR ini akan rendah dan tidak
membuat rangkaian tersebut mengalirkan arus ke arah buzzer atau speaker yang
terdapat di dalam rangkaian tersebut
Hal kebalikannya justru terjadi jika LDRmenerima cahaya rendah atau
gelap sama sekali. Hasilnya, tingkat resistansi menjadi lebih tinggi sehingga bisa
menimbulkan aliran ke arah komponen buzzer. Bersamaan dengan keadaan
tingkat resistansi yang tinggi, nantinya komponen IC akan terpicu dan mendorong
buzzer untuk menghasilkan suara yang nyaring dan mendeteksi adanya gangguan.
Rangkaian ini juga bisa menggunakan cahaya sebagai alat pengaktifannya jika
relay dan juga transistor terhubung dengan pin 3 atau output dari IC 1
2.4. Bluetooth Module HC-05
Gambar 2.9. Bentuk Fisik Bluetooth HC-05
Bluetooth Module HC-05 merupakan module komunikasi nirkabel pada
frekuensi 2.4GHz dengan pilihan koneksi bisa sebagai slave, ataupun sebagai
master. Sangat mudah digunakan dengan mikrokontroler untuk membuat aplikasi
wireless. Interface yang digunakan adalah serial RXD, TXD, VCC dan GND.
Built in LED sebagai indikator koneksi bluetooth. Modul BT ini terdiri dari dua
jenis yaitu Master dan Slave. Seri modul BT HC bisa dikenali dari nomor serinya,
jika nomer serinya genap maka modul BT tersebut sudah diset oleh pabrik,
adalah HC-06-S. Modul BT ini akan bekerja sebagai BT Slave dan tidak bisa
diubah menjadi Master, demikian juga sebaliknya misalnya HC-04M. Default
mode kerja untuk modul BT HC dengan seri genap adalah sebagai Slave.
Sedangkan modul BT HC dengan nomer seri ganjil, misalkan HC-05,
kondisi default biasanya diset sebagai Slave mode, tetapi pengguna bisa
mengubahnya menjadi mode Master dengan AT Command tertentu.
Penggunaan utama dari modul BT ini adalah menggantikan komunikasi serial via
kabel, sebagai contoh:
1. Jika akan menghubungkan dua sistem mikrokontroler agar bisa
berkomunikasi via serial port maka dipasang sebuah modul BT Master
pada satu sistem dan modul BT Slave pada sistem lainnya. Komunikasi
dapat langsung dilakukan setelah kedua modul melakukan pairing.
Koneksi via bluetooth ini menyerupai komunikasi serial biasa, yaitu
adanya pin TXD dan RXD.
2. Jika sistem mikrokontroler dipasangi modul BT Slave maka ia dapat
berkomunikasi dengan perangkat lain semisal PC yang dilengkapi adapter
BT ataupun dengan perangkat ponsel, smartphone dan lain-lain
3. Saat ini banyak perangkat seperti printer, GPS modul dan lain-lain yang
bekerja menggunakan media bluetooth, tentunya sistem mikrokontroler
yang dilengkapi dengan BT Master dapat bekerja mengakses
device-device tersebut
Pemakaian module BT pada sistem komunikasi baik antar dua sistem
mikrokontrol maupun antara suatu sistem ke device lain tidak perlu menggunakan
driver, tetapi komunikasi dapat terjadi dengan dua syarat yaitu :
1. Komunikasi terjadi antara modul BT Master dan BT Slave, komunikasi
tidak akan pernah terjadi jika kedua modul sama Master atau
sama-sama Slave, karena tidak akan pernah pairing diantara keduanya
2. Password yang dimasukkan cocok
Modul BT yang banyak beredar di sini adalah modul HC-06 atau
sejenisnya dan modul HC-05 dan sejenisnya. Perbedaan utama adalah
modul HC-06 tidak bisa mengganti mode karena sudah diset oleh pabrik,
modul tersebut. Diantaranya hanya bisa mengganti nama, baud rate dan
password saja.
Sedangkan untuk modul HC-05 memiliki kemampuan lebih yaitu bisa
diubah mode kerjanya menjadi Master atau Slave serta diakses dengan
lebih banyak AT Command, modul ini sangat direkomendasikan, terutama
dengan flexibilitasnya dalam pemilihan mode kerjanya.
2.5 Mikrokontroller ATMega 8
AVR merupakan salah satu jenis mikrokontroler yang di dalamnya
terdapat berbagai macam fungsi. Perbedaannya pada mikro yang pada umumnya
digunakan seperti MCS51 adalah pada AVR tidak perlu menggunakan oscillator
eksternal karena di dalamnya sudah terdapat internal oscillator. Selain itu
kelebihan dari AVR adalah memiliki Power-On Reset, yaitu tidak perlu ada
tombol reset dari luar karena cukup hanya dengan mematikan supply, maka secara
otomatis AVR akan melakukan reset. Untuk beberapa jenis AVR terdapat
beberapa fungsi khusus seperti ADC, EEPROM sekitar 128 bytesampai dengan
512 byte.AVR ATmega8 adalah mikrokontroler CMOS 8-bit berarsitektur AVR
RISC yang memiliki 8K byte in-System Programmable Flash.
Mikrokontroler dengan konsumsi daya rendah ini mampu mengeksekusi
instruksi dengan kecepatan maksimum 16MIPS pada frekuensi 16MHz. Jika
dibandingkan dengan ATmega8L perbedaannya hanya terletak pada besarnya
tegangan yang diperlukanuntuk bekerja. Untuk ATmega8 tipe L, mikrokontroler
ini dapat bekerja dengan tegangan antara 2,7 5,5 V sedangkan untuk ATmega8
hanya dapat bekerja pada tegangan antara 4,5 –5,5 V
Mikrokontroller merupakan alat pengolahan data digital dan analog (fitur
ADC pada seri AVR) dalam level tegangan maksimum 5V. Keunggulan
mikrokontroller dibanding microprocessor yaitu lebih murah dan didukung
dengan software compiler yang sangat beragam seperti software compailer
C/C++, basic, pascal, bahkan assembler. Sehingga penggunaan dapat memilih
program yang sesuai dengan kemampuannya. Dalam hal penggunaan,
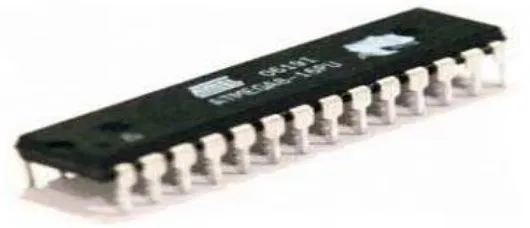
8, atmega 8535, atmega 16 dan lain-lain. ATMEGA 8 adalah mikrokontroler
CMOS 8-bit daya rendah berbasis arsitektur RISC yang ditingkatkan. Kebanyakan
instruksi dikerjakan pada satu siklus clock, ATMEGA 8 mempunyai throughput
mendekati 1 MPS per MHz membuat disain dari sistem untuk mengoptimasi
konsumsi daya versus kecepatan proses.Susunan pin – pin dari IC mikrokontroler
ATMEGA 8 diperlihatkan pada gambar dibawah ini. IC ini tersusun dari 28 pin
yang memiliki beberapa fungsi tertentu.
Mikrokontroller AVR merupakan keluarga mikrokontroller RISC
(Reduced Instruction Set Computing) keluaran Atmel. Konsep arsitektur AVR
pada mulanya dibuat oleh dua orang mahasiswa di Norwgian institute of
Technology (NTH ) yaitu Alf-Egil Bogen dan Vegard Wollan. Penggunaan
mikrokontroller ATMega8 ada dua pilihan ,dengan menggunakan board
ATMega8 develompment board yang sudah ada diparaan atau dengan membuat
rangkaian sendiri. Jika menggunakan rangkaian mikrokonter yang sudah tersedia
dipasaran maka akan memepersingkat waktu pembuatan sistem, karena hanya
tinggal membeli rangkaian berupa kit dan hanya tinggal menggunakannya. Chip
yang dijelaskan di sini menggunakan kemasan PDIP, untuk kemasan yang lain
(TQPF, QFN / MLF) tidak jauh berbeda. Untuk lebih jelasnya silahkan merujuk
ke data sheet. Nama nama pin di atas usahakan lebihsering dikenal, hal ini
berguna untuk penggunaan pheripheral internal.
2.5.1 Konfigurasi Pin ATMega 8
ATmega8 memiliki 28 Pin, yang masing-masing pin nya memiliki fungsi
yang berbeda-beda baik sebagai port maupun fungsi yang lainnya. Berikut akan
dijelaskan fungsi dari masing-masing kaki ATmega8 :
a. VCC
Merupakan supply tegangandigital.
b. GND
Merupakan ground untuk semua komponen yang membutuhkan grounding.
c. Port B (PB7...PB0)
Didalam Port B terdapat XTAL1, XTAL2, TOSC1, TOSC2. Jumlah Port B adalah
8 buah pin, mulai dari pin B.0 sampai dengan B.7. Tiap pin dapat igunakan
sebagai input maupun output. Port B merupakan sebuah 8-bit bi-directional I/O
dengan internal pull-up resistor. Sebagai input, pin-pin 7yang terdapat pada port B
yang secara eksternal diturunkan, maka akan mengeluarkan arus jika pull-up
resistor diaktifkan. Khusus PB6 dapat digunakan sebagai input Kristal (inverting
oscillator amplifier) dan input ke rangkaian clock internal, bergantung pada
pengaturan Fuse bit yang digunakan untuk memilih sumber clock. Sedangkan
untuk PB7 dapat digunakan sebagai output Kristal (output oscillator amplifier)
bergantung pada pengaturan Fuse bityang digunakan untuk memilih sumber
clock. Jika sumber clock yang dipilih dari oscillator internal, PB7 dan PB6 dapat
digunakan sebagai I/O atau jika menggunakan Asyncronous Timer/Counter2
maka PB6 dan PB7 (TOSC2 dan TOSC1) digunakan untuk saluran input timer.
d. Port C (PC5...PC0)
Port C merupakan sebuah 7-bit bi-directionalI/O port yang di dalam
masing-masing pin terdapat pull-upresistor. Jumlah pin nya hanya 7 buah mulai dari pin
C.0 sampai dengan pinC.6. Sebagai keluaran/output portC memiliki karakteristik
yang sama dalam hal menyerap arus (sink) ataupun mengeluarkan arus (source).
e. RESET/PC6
Jika RSTDISBL Fusediprogram, maka PC6 akan berfungsi sebagai pinI/O. Pin ini
memiliki karakteristik yang berbeda dengan pin-pinyang terdapat pada port C
lainnya. Namun jika RSTDISBL Fuse tidak diprogram, maka pin ini akan
rendah dan pulsa yang ada lebih pendek dari pulsa 8 minimum, maka akan
menghasilkan suatu kondisi reset meskipun clock-nya tidak bekerja.
f. Port D (PD7...PD0)
Port D merupakan 8-bit bit-directionalI/O dengan internal pullupresistor. Fungsi
dari port ini sama dengan port-port yang lain. Hanya saja pada port initidak
terdapat kegunaan-kegunaan yang lain. Pada portini hanya berfungsi sebagai
masukan dan keluaran saja atau biasadisebut dengan I/O.
g. AVcc
Pin ini berfungsi sebagai supply tegangan untuk ADC. Untuk pin ini harus
dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog
saja. Bahkan jika ADC pada AVR tidak digunakan tetap saja disarankan untuk
menghubungkannya secara terpisah dengan VCC. Jika ADC digunakan, maka
AVcc harus dihubungkan ke VCC melalui low pass filter.
h. AREF
Merupakan pin referensi jika menggunakan ADC.
Gambar 2.11. Bentuk Fisik ATmega8
Pada AVR status register mengandung beberapa informasi mengenai hasil
dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini digunakan untuk
altering arus program sebagai kegunaan untuk meningkatkan performa
pengoperasian. Register inidi-update setelah operasi ALU (Arithmetic Logic Unit)
hal tersebut seperti yang tertulis dalam datasheetkhususnya pada bagian
Instruction Set Reference.Dalam hal ini untuk beberapa kasus dapat
membuangpenggunaan kebutuhan instruksi perbandingan yang telah
didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan
kode yang lebih sederhana dan singkat. Register ini tidak secara otomatis
sebuah perintah setelah kembali dari interupsi. Namun hal tersebut harus
dilakukan melalui software. Berikut adalah gambar status register.
Gambar 2.12. Status Register ATMega 1. Bit 7 (I)
Merupakan bit Global Interrupt Enable. Bitini harus di-set agar semua perintah
interupsi dapat dijalankan. Untuk perintah interupsi individual akan di jelaskan
pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik
yang individual maupun yang secara umum akan diabaikan. Bit ini akan
dibersihkan atau clear oleh hardwaresetelah sebuah interupsi di jalankan dan akan
di-setkembali oleh perintah RETI. Bitini juga dapat diset dan di-resetmelalui
aplikasi dan intruksi SEI dan CLL.
2. Bit 6 (T)
Merupakan bitCopy Storage. Instruksi bit Copy Instructions BLD (Bit Load) and
BST (Bit Store) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah
dioperasikan. Sebuah bit dari sebuah registerdalam Register Fildapat disalin ke
dalam bit ini denganmenggunakan instruksi BST, dan sebuah bitdi dalam bit ini
dapat disalin ke dalam bit di dalam register padaRegister File dengan
menggunakan perintah BLD.
3. Bit 5(H)
Merupakan bit Half Carry Flag. Bitini menandakan sebuah Half Carry dalam
beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatika BCD.
4. Bit 4(S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah ekslusif di antaraNegative
Flag(N) dan two’s Complement Overflow Flag (V).
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi
aritmatika dua komplemen.
6. Bit 2(N)
Merupakan bit Negative Flag. Bit ini mengindikasikan sebuah hasil negative di
dalam sebuah fungsi logika atai aritmatika.
7. Bit 1(Z)
Merupakan bit Zero Flag. Bit ini mengindikaikan sebuah jasil nol “0” dalam
sebuah fungsi aritmatika atau logika.
8. Bit 0(C)
Merupakan bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa dalam
sebuah aritmatika atau logika.
2.5.2 Memori AVR ATMega
Memori atmega terbagi menjadi tiga yaitu :
2.5.2.1Memori Flash
Memori flash adalah memori ROM tempat kode-kode program berada.
Kata flash menunjukan jenis ROM yang dapat ditulis dan dihapus secara elektrik.
Memori flash terbagi menjadi dua bagian yaitu bagian aplikasi dan bagian boot.
Bagian aplikasi adalah bagian kode-kode program apikasi berada. Bagian boot
adalah bagian yang digunakan khusus untuk booting awal yang dapat diprogram
untuk menulis bagian aplikasi tanpa melalui programmer/downloader, misalnya
melalui USART.
2.5.2.2 Memori Data
Memori data adalah memori RAM yang digunakan untuk keperluan
program.
32 GPR (General Purphose Register) adalah register khusus yang bertugas untuk
membantu eksekusi program oleh ALU (Arithmatich Logic Unit), dalam instruksi
assembler setiap instruksi harus melibatkan GPR. Dalam bahasa C biasanya
digunakan untuk variabel global atau nilai balik fungsi dan nilainilai yang dapat
memperingan kerja ALU. Dalam istilah processor komputer sahari-hari GPR
dikenal sebagai “chace memory”.I/O register dan Aditional I/O register adalah
register yang difungsikankhusus untuk mengendalikan berbagai pheripheral dalam
mikrokontroler seperti pin port, timer/counter, usart dan lain-lain.
Register ini dalam keluarga mikrokontrol MCS51 dikenal sebagai
SFR(Special Function Register).
2.5.2.3 EEPROM
EEPROM adalah memori data yang dapat mengendap ketika chip mati
(off), digunakan untuk keperluan penyimpanan data yang tahan terhadap
2.5.3. Fitur ATmega8
Berikut ini adalah fitur-fitur yang dimiliki oleh ATMega8 :
A. Saluran I/O sebanyak 23 buah terbagi menjadi 3 port.
B. ADC sebanyak 6 saluran dengan 4 saluran 10 bit dan 2 saluran 8 bit.
C. Tiga buah timer counter, dua diantaranya memiliki fasilitas pembanding.
D. CPU dengan 32 buah register
E. Watchdog timer dan oscillator internal.
F. SRAM sebesar 1K byte.
G. Memori flash sebesar 8K Bytes system Self-programable Flash
H. Unit interupsi internal dan eksternal.
I. Port antarmuka
J. EEPROM sebesar 512 byte.
K. Port USART ( Universal Syncronous and Asycronous Serial Receiver and
Transmitter ) untuk komunikasi serial.
2.6. Transistor bd139
Gambar 2.14. Transistor bd139
Transistor BD139 adalah transistor multiguna tipe NPN. Transistor yang
akan dibahas adalah transistor jenis BJT (Bias Junction Transistor). Transistor
BJT pertama kali dibuat oleh William Bradford Schockley, John Bardeen dan
Walter Houser Brattain pada tahun 1951 atas penemuannya ini ketiga Ilmuan ini
transistor membawa perubahan yang ekstrim dalam dunia khususnya bidang
elektronika. Jika dulu sebelum ada transistor peralatan elektronika dibuat masih
menggunakan tabung hampa yang memiliki ukuran yang besar dan membutuhkan
daya listrik yang tinggi untuk pengoperasiannya, namun setelah ditemukannya
transistor, peralatan elektronika dapat dibuat menjadi lebih kecil, handal dan tidak
membutuhkan daya yang besar untuk pengoperasiaanya. Penemuan transistor
membawa perubahan besar dalam industri elektronika dan membuka gerbang
menuju dunia moderen hingga saat ini.
Dari awal mula transistor dibuat hingga saat ini ada 2 golongan besar transistor
yaitu :
1. Transistor tegangan bias (Bias Junction Transistor (BJT))
2. Transistor efek medan (FET = Field Effect Transistor)
Namun dipasaran transistor jenis BJT paling banyak digunakan. Transistor efek
medan lebih banyak digunakan pada peralatan yang membutuhkan kecepatan