Abstrak—Berdasarkan sifat dan besarnya gangguan,
analisa stabilitas sistem dapat diklasifikasikan dalam stabilitas keadaan mantap (steady state), keadaan transien dan keadaan dinamik. Gangguan berat yang bersifat mendadak pada sistem daya memerlukan analisa stabilitas transien. Waktu pemutusan kritis
(Critical Clearing Time-CCT) perlu dihitung untuk
mengetahui kapan seharusnya Circuit Breaker (CB) membuka. Hal ini untuk menjaga agar sudut rotor generator kembali pada kondisi yang stabil (Stable
Equilibrium Point-SEP). Pada tugas akhir ini metode Shadowing yang dikembangkan dari metode Boundary Controlling Unstable (BCU) akan diterapkan secara
langsung pada sistem banyak mesin untuk mendapatkan
Controlling Unstable Equilibrium Point (CUEP).
Kemudian menghitung Critical Clearing Time-CCT berdasarkan lintasan yang menghubungkan antara
Controlling Unstable Equilibrium Point (CUEP) dan Exit Point.
Kata Kunci—Shadowing Method, Controlling Unstable Equilibrium Point (CUEP), Critical Clearing Time (CCT),
Kestabilan Transien.
I. PENDAHULUAN
ISTEM tenaga listrik yang baik adalah sistem tenaga yang dapat melayani beban secara kontinyu dimana tegangan dan frekuensi konstan. Fluktuasi tegangan dan frekuensi yang terjadi harus berada pada batas toleransi yang diizinkan agar peralatan listrik konsumen dapat bekerja dengan baik dan aman. Kondisi sistem yang benar-benar mantap sebenarnya tidak pernah ada. Perubahan beban selalu terjadi dalam sistem. Penyesuaian oleh pembangkit akan dilakukan melalui gevernor dari penggerak mula dan eksitasi generator. Perubahan kondisi sistem yang seketika, biasanya terjadi akibat adanya gangguan hubung singkat pada sistem tenaga listrik dan pelepasan atau penambahan beban yang besar secara tiba-tiba. Akibat adanya perubahan kondisi kerja dari sistem ini, maka keadaan sistem akan berubah dari keadaan lama ke keadaan baru. Periode singkat di antara kedua keadaan tersebut disebut periode paralihan atau transien. Oleh karena itu diperlukan suatu analisis sistem tenaga listrik untuk menentukan apakah sistem tersebut stabil atau tidak, jika terjadi gangguan. Stabilitas transien didasarkan pada kondisi kestabilan ayunan pertama
(first swing) dengan periode waktu penyelidikan pada detik
pertama terjadi gangguan.
Salah satu metode yang dapat digunakan untuk menentukan kestabilan suatu sistem tenaga listrik apabila mengalami gangguan adalah metode Shadowing . Metode
Shadowing yang dikembangkan dari metode Boundary Controlling Unstable (BCU) akan diterapkan secara
langsung pada sistem banyak mesin untuk menghitung
Critical Clearing Time (CCT), dimana jika gangguan
diputus kurang dari waktu kritisnya/Critical Clearing Time
(CCT), maka generator akan kembali stabil. Namun, jika
gangguan diputus lebih dari waktu kritisnya/critical clearing
time (CCT), maka generator akan berada pada kondisi tidak
stabil. Metode shadowing ini akan dijadikan dasar dari pembahasan artikel ini dalam menentukan Controlling
Unstable Equilibrium Point (CUEP) untuk perhitungan critical clearing time (CCT) yang akurat dan cepat.
Sehingga, mampu memberikan penilaian kestabilan suatu sistem tenaga listrik.
III. KESTABILANTRANSIEN
Stabilitas transien adalah kemampuan untuk tetap pada kondisi sinkron selama periode terjadinya gangguan dan sebelum adanya reaksi dari governor. Pada umumnya ayunan pertama pada rotor mesin akan terjadi selama satu detik setelah gangguan, tetapi waktu yang sebenarnya bergantung pada karakteristik mesin dan sistem transmisi. Setelah periode ini, governor akan mulai bereaksi, biasanya sekitar 3 hingga 5 detik. Kestabilan transien tergantung pada kondisi awal dan besarnya gangguan. Hal ini berkaitan pada kemampuan keseimbangan antara torsi elektromagnetik dan torsi mekanik pada setiap mesin sinkron yang terdapat pada sistem tenaga listrik tersebut. Jika kesetimbangan terganggu maka terjadi perbedaan antara torsi mekanik dan torsi elektromagnetik sehingga, mengakibatkan percepatan atau perlambatan putaran rotor generator.
Pada referensi [2] telah dijelaskan bahwa pengaturan gerakan rotor suatu mesin sinkron didasarkan pada prinsip dasar dinamika yang menyatakan bahwa momen percepatan (accellerating torque) adalah hasil kali dari momen inersia rotor dan percepatan sudut.
J 2 dt θ 2 d m = Tm –Te =Ta (2. 1) dimana:
J = Momen kelembaman total dari massa rotor (kg-m2) θm = Pergeseran sudut rotor terhadap suatu sumbu yang
diam (radian mekanis) t = Waktu (detik)
Ta = Momen putar percepatan bersih (N-m)
Perbaikan Perhitungan Waktu Pemutusan Kritis
Berbasis Fungsi Energi
Dengan Menggunakan Metode Shadowing
Ricky Sakding, Ardyono Priyadi, I Gusti Ngurah Satriyadi Hernanda
Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
E-mail : [email protected]
Ea Vt
xd’
I
+
-
Tm = Momen putar mekanis oleh penggerak mula
(N-m)
Te = Momen putar elektromagnetis (N-m)
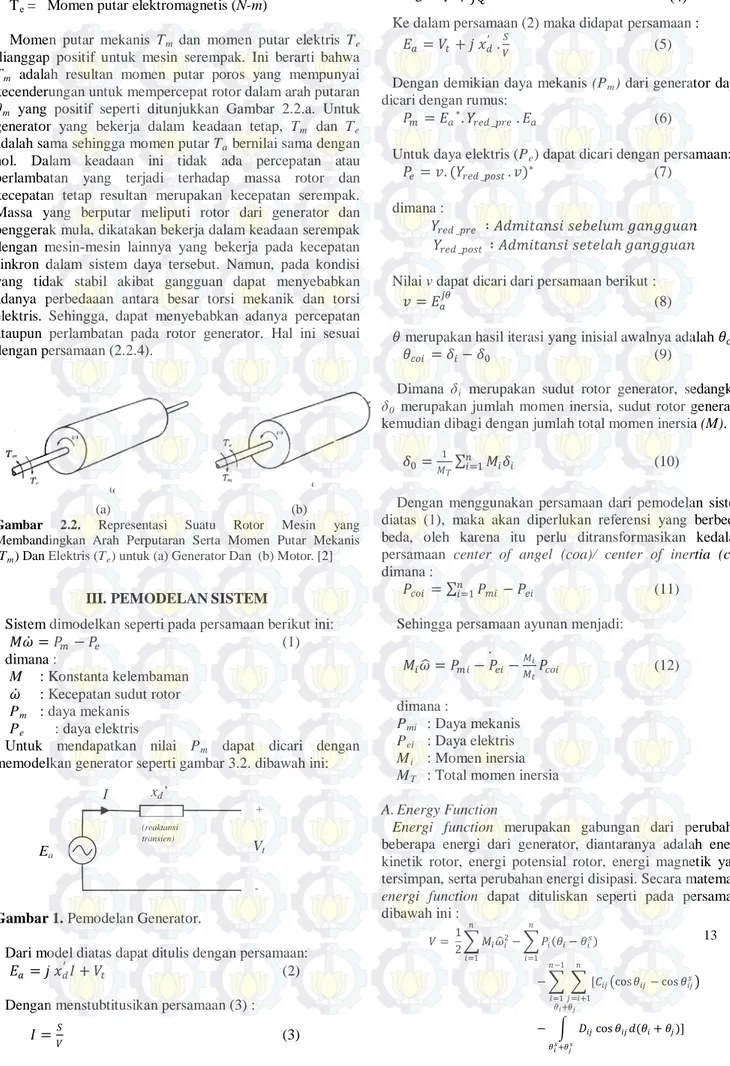
Momen putar mekanis Tm dan momen putar elektris Te dianggap positif untuk mesin serempak. Ini berarti bahwa
Tm adalah resultan momen putar poros yang mempunyai
kecenderungan untuk mempercepat rotor dalam arah putaran
θm yang positif seperti ditunjukkan Gambar 2.2.a. Untuk
generator yang bekerja dalam keadaan tetap, Tm dan Te adalah sama sehingga momen putar Ta bernilai sama dengan nol. Dalam keadaan ini tidak ada percepatan atau perlambatan yang terjadi terhadap massa rotor dan kecepatan tetap resultan merupakan kecepatan serempak. Massa yang berputar meliputi rotor dari generator dan penggerak mula, dikatakan bekerja dalam keadaan serempak dengan mesin-mesin lainnya yang bekerja pada kecepatan sinkron dalam sistem daya tersebut. Namun, pada kondisi yang tidak stabil akibat gangguan dapat menyebabkan adanya perbedaaan antara besar torsi mekanik dan torsi elektris. Sehingga, dapat menyebabkan adanya percepatan ataupun perlambatan pada rotor generator. Hal ini sesuai dengan persamaan (2.2.4).
(a) (b)
Gambar 2.2. Representasi Suatu Rotor Mesin yang Membandingkan Arah Perputaran Serta Momen Putar Mekanis (Tm) Dan Elektris (Te) untuk (a) Generator Dan (b) Motor. [2]
III. PEMODELANSISTEM
Sistem dimodelkan seperti pada persamaan berikut ini: 𝑀𝑀𝜔𝜔̇ = 𝑃𝑃𝑚𝑚− 𝑃𝑃𝑒𝑒 (1) dimana :
M : Konstanta kelembaman 𝜔𝜔̇ : Kecepatan sudut rotor Pm : daya mekanis Pe : daya elektris
Untuk mendapatkan nilai Pm dapat dicari dengan memodelkan generator seperti gambar 3.2. dibawah ini:
Gambar 1. Pemodelan Generator.
Dari model diatas dapat ditulis dengan persamaan: 𝐸𝐸𝑎𝑎 = 𝑗𝑗 𝑥𝑥𝑑𝑑′𝐼𝐼 + 𝑉𝑉𝑡𝑡 (2) Dengan menstubtitusikan persamaan (3) :
𝐼𝐼 =𝑉𝑉𝑆𝑆 (3)
dimana :
𝑆𝑆 = 𝑃𝑃 + 𝑗𝑗𝑗𝑗 (4) Ke dalam persamaan (2) maka didapat persamaan :
𝐸𝐸𝑎𝑎 = 𝑉𝑉𝑡𝑡+ 𝑗𝑗 𝑥𝑥𝑑𝑑′ .𝑉𝑉𝑆𝑆 (5)
Dengan demikian daya mekanis (Pm) dari generator dapat dicari dengan rumus:
𝑃𝑃𝑚𝑚 = 𝐸𝐸𝑎𝑎∗. 𝑌𝑌𝑟𝑟𝑒𝑒𝑑𝑑 _𝑝𝑝𝑟𝑟𝑒𝑒 . 𝐸𝐸𝑎𝑎 (6)
Untuk daya elektris (Pe) dapat dicari dengan persamaan: 𝑃𝑃𝑒𝑒 = 𝑣𝑣. (𝑌𝑌𝑟𝑟𝑒𝑒𝑑𝑑 _𝑝𝑝𝑝𝑝𝑝𝑝𝑡𝑡. 𝑣𝑣)∗ (7)
dimana :
𝑌𝑌𝑟𝑟𝑒𝑒𝑑𝑑 _𝑝𝑝𝑟𝑟𝑒𝑒 ∶ 𝐴𝐴𝑑𝑑𝑚𝑚𝐴𝐴𝑡𝑡𝑎𝑎𝐴𝐴𝑝𝑝𝐴𝐴 𝑝𝑝𝑒𝑒𝑠𝑠𝑒𝑒𝑠𝑠𝑠𝑠𝑚𝑚 𝑔𝑔𝑎𝑎𝐴𝐴𝑔𝑔𝑔𝑔𝑠𝑠𝑎𝑎𝐴𝐴 𝑌𝑌𝑟𝑟𝑒𝑒𝑑𝑑 _𝑝𝑝𝑝𝑝𝑝𝑝𝑡𝑡 ∶ 𝐴𝐴𝑑𝑑𝑚𝑚𝐴𝐴𝑡𝑡𝑎𝑎𝐴𝐴𝑝𝑝𝐴𝐴 𝑝𝑝𝑒𝑒𝑡𝑡𝑒𝑒𝑠𝑠𝑎𝑎ℎ 𝑔𝑔𝑎𝑎𝐴𝐴𝑔𝑔𝑔𝑔𝑠𝑠𝑎𝑎𝐴𝐴 Nilai v dapat dicari dari persamaan berikut :
𝑣𝑣 = 𝐸𝐸𝑎𝑎𝑗𝑗𝑗𝑗 (8)
𝑗𝑗 merupakan hasil iterasi yang inisial awalnya adalah 𝑗𝑗𝑐𝑐𝑝𝑝𝐴𝐴 𝑗𝑗𝑐𝑐𝑝𝑝𝐴𝐴 = 𝛿𝛿𝐴𝐴− 𝛿𝛿0 (9)
Dimana δi merupakan sudut rotor generator, sedangkan
δ0 merupakan jumlah momen inersia, sudut rotor generator kemudian dibagi dengan jumlah total momen inersia (M).
𝛿𝛿0=𝑀𝑀1𝑇𝑇∑𝐴𝐴𝐴𝐴=1𝑀𝑀𝐴𝐴𝛿𝛿𝐴𝐴 (10)
Dengan menggunakan persamaan dari pemodelan sistem diatas (1), maka akan diperlukan referensi yang berbeda-beda, oleh karena itu perlu ditransformasikan kedalam persamaan center of angel (coa)/ center of inertia (coi) dimana :
𝑃𝑃𝑐𝑐𝑝𝑝𝐴𝐴 = ∑𝐴𝐴𝐴𝐴=1𝑃𝑃𝑚𝑚𝐴𝐴− 𝑃𝑃𝑒𝑒𝐴𝐴 (11) Sehingga persamaan ayunan menjadi:
𝑀𝑀𝐴𝐴𝜔𝜔� = 𝑃𝑃𝑚𝑚𝐴𝐴− 𝑃𝑃̇𝑒𝑒𝐴𝐴−𝑀𝑀𝐴𝐴𝑀𝑀𝑡𝑡𝑃𝑃𝑐𝑐𝑝𝑝𝐴𝐴 (12)
dimana :
Pmi : Daya mekanis Pei : Daya elektris Mi : Momen inersia MT : Total momen inersia
A. Energy Function
Energi function merupakan gabungan dari perubahan
beberapa energi dari generator, diantaranya adalah energi kinetik rotor, energi potensial rotor, energi magnetik yang tersimpan, serta perubahan energi disipasi. Secara matematis
energi function dapat dituliskan seperti pada persamaan
dibawah ini : 𝑉𝑉 = 12 � 𝑀𝑀𝐴𝐴𝜔𝜔�𝐴𝐴2 𝐴𝐴 𝐴𝐴=1 − � 𝑃𝑃𝐴𝐴(𝑗𝑗𝐴𝐴− 𝑗𝑗𝐴𝐴𝑝𝑝) 𝐴𝐴 𝐴𝐴=1 − � � [𝐶𝐶𝐴𝐴𝑗𝑗�cos𝑗𝑗𝐴𝐴𝑗𝑗− cos 𝑗𝑗𝐴𝐴𝑗𝑗𝑝𝑝� 𝐴𝐴 𝑗𝑗 =𝐴𝐴+1 𝐴𝐴−1 𝐴𝐴=1 − � 𝐷𝐷𝐴𝐴𝑗𝑗cos 𝑗𝑗𝐴𝐴𝑗𝑗𝑑𝑑(𝑗𝑗𝐴𝐴+ 𝑗𝑗𝑗𝑗) 𝑗𝑗𝐴𝐴+𝑗𝑗𝑗𝑗 𝑗𝑗𝐴𝐴𝑝𝑝+𝑗𝑗𝑗𝑗𝑝𝑝 ] (reaktansi transien) 13
Dari persamaan diatas didapat empat persamaan perubahan energi, antara lain:
1. Perubahan energi kinetik rotor :
𝑉𝑉𝑘𝑘=12∑𝐴𝐴𝐴𝐴=1𝑀𝑀𝐴𝐴𝜔𝜔�𝐴𝐴2 (14)
2. Perubahan energi potensial rotor : 𝑉𝑉𝑝𝑝= − ∑𝐴𝐴𝐴𝐴=1𝑃𝑃𝐴𝐴(𝑗𝑗𝐴𝐴− 𝑗𝑗𝐴𝐴𝑝𝑝) (15)
dimana : 𝑃𝑃𝐴𝐴 = 𝑃𝑃𝑚𝑚 − 𝑌𝑌𝑟𝑟𝑒𝑒𝑑𝑑 _𝑝𝑝𝑝𝑝𝑝𝑝𝑡𝑡. 𝐸𝐸𝑎𝑎2 (16)
3. Perubahan energi magnetik yang tersimpan : 𝑉𝑉𝑚𝑚 = − ∑𝐴𝐴−1𝐴𝐴=1 ∑𝐴𝐴𝑗𝑗 =𝐴𝐴+1𝐸𝐸𝐴𝐴𝐸𝐸𝑗𝑗𝐵𝐵𝐴𝐴𝑗𝑗(cos�𝑗𝑗𝐴𝐴− 𝑗𝑗𝑗𝑗� − cos(𝑗𝑗𝐴𝐴𝑝𝑝−𝑗𝑗𝑗𝑗𝑝𝑝)) (17)
4. Perubahan energi disipasi : ∫𝑗𝑗𝑗𝑗𝐴𝐴𝑝𝑝𝐴𝐴+𝑗𝑗+𝑗𝑗𝑗𝑗𝐷𝐷𝐴𝐴𝑗𝑗cos 𝑗𝑗𝐴𝐴𝑗𝑗𝑑𝑑(𝑗𝑗𝐴𝐴+ 𝑗𝑗𝑗𝑗) 𝑗𝑗 𝑝𝑝 ] (18)
Dalam hal ini energi disipasi tidak dapat dihitung, sehingga bernilai nol. Dari persamaan energy function diatas, parameter 𝑗𝑗𝑝𝑝 yang merupakan nilai dari SEP (Stable Equilibrium Point) belum diketahui. Oleh karena itu, nilai dari SEP dapat ditentukan dari : 𝑗𝑗𝐴𝐴𝑝𝑝= 𝛿𝛿𝐴𝐴𝑝𝑝− 𝛿𝛿0𝑝𝑝 (19)
Dimana, 𝛿𝛿𝐴𝐴𝑝𝑝 merupakan sudut rotor yang nilainya berada pada ketetapan batas bawah dari SEP (Stable Equilibrium Point). Sedangkan 𝛿𝛿0𝑝𝑝 dapat ditentukan dari persamaan : 𝛿𝛿0𝑝𝑝=𝑀𝑀𝑇𝑇1 ∑𝐴𝐴𝐴𝐴=1𝑀𝑀𝐴𝐴𝛿𝛿𝐴𝐴𝑝𝑝 (20)
Setelah didapat semua parameter diatas, maka selanjutnya adalah menghitung fault trajectory. Fault trajectory dapat dihitung menggunakan metode pendekatan runge kutta-orde empat seperti persamaan berikut : 𝑘𝑘1 = 𝑓𝑓(𝑥𝑥) (21)
𝑘𝑘2 = 𝑓𝑓 �𝑥𝑥 +12𝑘𝑘1� (22)
𝑘𝑘3 = 𝑓𝑓 �𝑥𝑥 +12𝑘𝑘2� (23)
𝑘𝑘4 = 𝑓𝑓(𝑥𝑥 + 𝑘𝑘3) (24)
𝑥𝑥 = 𝑥𝑥 +16(𝑘𝑘1 + 2𝑘𝑘2 + 2𝑘𝑘3 + 𝑘𝑘4) (25)
Dimana, 𝑓𝑓(𝑥𝑥) merupakan fungsi dari energy function pada saat gangguan yang dapat dicari dari persamaan (7), (8), (11), (12) dan x untuk nilai awal adalah nilai dari 𝑋𝑋𝑠𝑠𝑐𝑐𝑠𝑠 _𝑓𝑓𝑎𝑎𝑠𝑠𝑠𝑠𝑡𝑡 yang didapat dari penggabungan dimensi dari matrik nilai 𝑗𝑗𝑐𝑐𝑝𝑝𝐴𝐴 (𝐴𝐴) dan nilai dari matrik 𝑗𝑗𝑐𝑐𝑝𝑝𝐴𝐴 (𝐴𝐴). 𝑋𝑋𝑠𝑠𝑐𝑐𝑠𝑠 _𝑓𝑓𝑎𝑎𝑠𝑠𝑠𝑠𝑡𝑡 = ⎣ ⎢ ⎢ ⎢ ⎡ 0⋮ 𝑗𝑗𝑐𝑐𝑝𝑝𝐴𝐴 (𝐴𝐴) ⋮ 𝑗𝑗𝑐𝑐𝑝𝑝𝐴𝐴 (𝐴𝐴)⎦ ⎥ ⎥ ⎥ ⎤ (26)
Sehingga dengan pendekatan metode ini akan didapatkan fault trajectory sampai exit point yang direpresentasikan dengan nilai dari 𝑋𝑋𝑠𝑠𝑐𝑐𝑠𝑠 _𝑓𝑓𝑎𝑎𝑠𝑠𝑠𝑠𝑡𝑡 _𝐴𝐴𝑒𝑒𝑛𝑛. 𝑋𝑋𝑠𝑠𝑐𝑐𝑠𝑠 _𝑓𝑓𝑎𝑎𝑠𝑠𝑠𝑠𝑡𝑡 _𝐴𝐴𝑒𝑒𝑛𝑛 = ⎣ ⎢ ⎢ ⎢ ⎢ ⎡𝜔𝜔𝑒𝑒𝑥𝑥𝐴𝐴𝑡𝑡 1⋮ 𝜔𝜔𝑒𝑒𝑥𝑥𝐴𝐴𝑡𝑡 𝐴𝐴 𝑗𝑗𝑒𝑒𝑥𝑥𝐴𝐴𝑡𝑡 1 ⋮ 𝑗𝑗𝑒𝑒𝑥𝑥𝐴𝐴𝑡𝑡 𝐴𝐴⎦ ⎥ ⎥ ⎥ ⎥ ⎤ (27) B. Shadowing Method
Terdapat beberapa metode untuk menentukan energi kristis dalam analisis kestabilan transien menggunakan metode energy function. Mengacu pada referensi [11], BCU
method merupakan teknik numerikal untuk mendapatkan
energi kritis dan kemudian menentukan CUEP dengan berdasarkan exit point. BCU method menghubungan antara batas kestabilan dari sistem original dengan sistem tereduksi, dari hubungan ini BCU method mendapatkan
CUEP dari sistem gradien tereduksi dan bukan pada sistem
original; jika dan hanya jika lintasan gangguan (δ1,ω1) pada sistem adalah lintasan gangguan pada original sistem (δ,ω). Terdapat 2 tahapan dalam mendapatkan CUEP pada BCU
method :
1. Menemukan exit point dari gradien sistem θegsa
2. Menemukan nilai minimum titik gradien (Minimum
Gradien Method (MGP) θmgp
disepanjang lintasan exit point, dan menggunakannya sebagai inisial awal yang
diintegrasikan hingga mendapatkan CUEP.
Namun BCU method memilki kemungkinan gagal, yaitu jika MGP tidak dapat ditemukan dan juga jika MGP ditemukan dan dilakukan proses iterasi untuk menemukan
CUEP yang tidak konvergen, hal ini disebabkan kesalahan
dalam menemukan exit point dari sistem gradien tereduksi. Untuk mengatasi masalah ini, telah dikembangkan suatu metode baru yang disebut Shadowing method, metode ini mengatasi masalah MGP. Teknik ini dikembangkan dengan memanfaatkan exit point, dimana :
1. Dalam teknik ini tidak perlu menemukan (MGP) θmgp 2. Dengan teknik ini dapat memproduksi suatu titik
inisial awal θm untuk menemukan CUEP
Dalam Shadowing Method terdapat 2 tahapan untuk menemukan CUEP :
1. Dengan metode yang sama persis dengan BCU method, temukan exit point pada sistem gradien tereduksi. 2. Menggunakan exit point sebagai titik inisial awal
sistem gradien θm untuk diintegrasikan sampai menemukan CUEP.
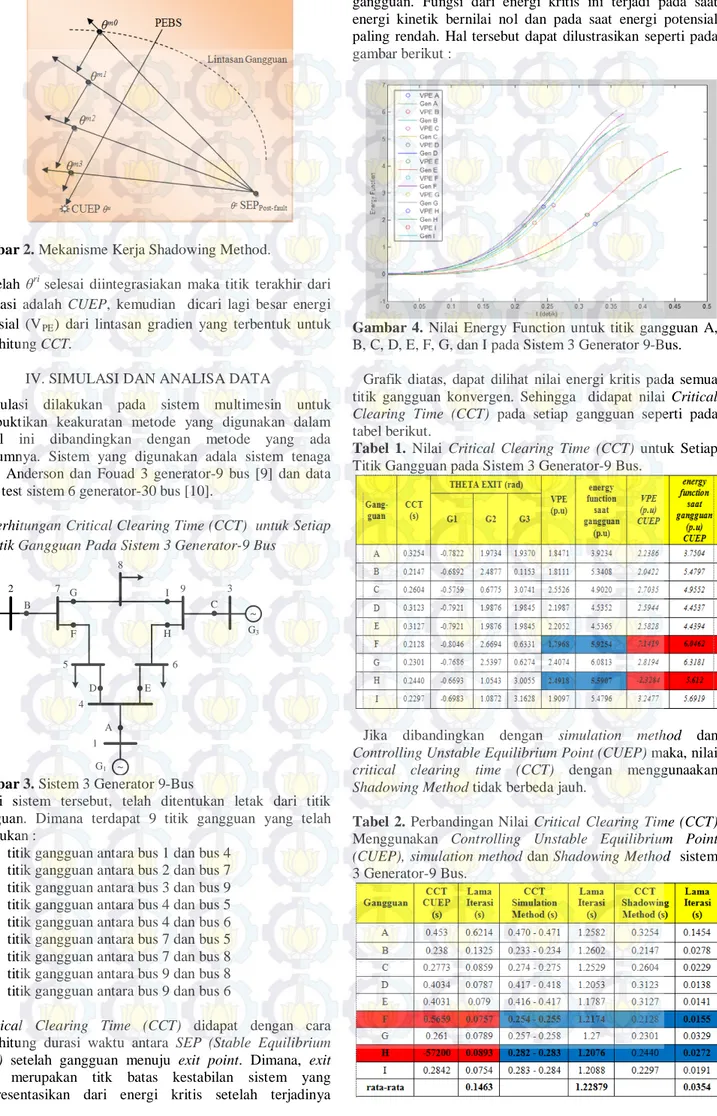
Kemudian dari tahapan kedua, ini menjadi proses utama dari Shadowing method hingga menemukan CUEP yang terdiri dari 3 tahapan : i ∈[1,...,N]
1. Temukan inisial awal θri = φgs (θm(i-1),ti), ti relatif kecil 2. R(θri)={ θ:θ=( θri – θ s).α+ θ s, α≥0}
Gambar 2. Mekanisme Kerja Shadowing Method.
Setelah θri selesai diintegrasiakan maka titik terakhir dari integrasi adalah CUEP, kemudian dicari lagi besar energi potensial (VPE) dari lintasan gradien yang terbentuk untuk menghitung CCT.
IV. SIMULASI DAN ANALISA DATA
Simulasi dilakukan pada sistem multimesin untuk membuktikan keakuratan metode yang digunakan dalam artikel ini dibandingkan dengan metode yang ada sebelumnya. Sistem yang digunakan adala sistem tenaga listrik Anderson dan Fouad 3 generator-9 bus [9] dan data IEEE test sistem 6 generator-30 bus [10].
A. Perhitungan Critical Clearing Time (CCT) untuk Setiap Titik Gangguan Pada Sistem 3 Generator-9 Bus
Gambar 3. Sistem 3 Generator 9-Bus
Dari sistem tersebut, telah ditentukan letak dari titik gangguan. Dimana terdapat 9 titik gangguan yang telah ditentukan :
A : titik gangguan antara bus 1 dan bus 4 B : titik gangguan antara bus 2 dan bus 7 C : titik gangguan antara bus 3 dan bus 9 D : titik gangguan antara bus 4 dan bus 5 E : titik gangguan antara bus 4 dan bus 6 F : titik gangguan antara bus 7 dan bus 5 G : titik gangguan antara bus 7 dan bus 8 H : titik gangguan antara bus 9 dan bus 8 I : titik gangguan antara bus 9 dan bus 6
Critical Clearing Time (CCT) didapat dengan cara
menghitung durasi waktu antara SEP (Stable Equilibrium
Point) setelah gangguan menuju exit point. Dimana, exit point merupakan titk batas kestabilan sistem yang
direpresentasikan dari energi kritis setelah terjadinya
gangguan. Fungsi dari energi kritis ini terjadi pada saat energi kinetik bernilai nol dan pada saat energi potensial paling rendah. Hal tersebut dapat dilustrasikan seperti pada gambar berikut :
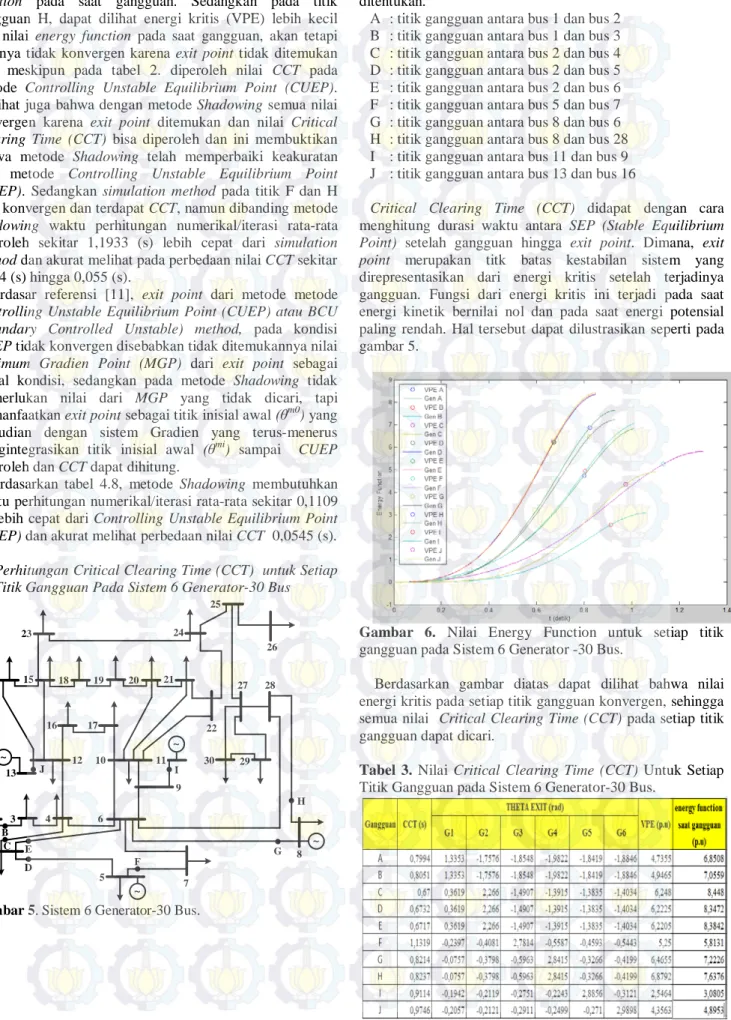
Gambar 4. Nilai Energy Function untuk titik gangguan A,
B, C, D, E, F, G, dan I pada Sistem 3 Generator 9-Bus. Grafik diatas, dapat dilihat nilai energi kritis pada semua titik gangguan konvergen. Sehingga didapat nilai Critical
Clearing Time (CCT) pada setiap gangguan seperti pada
tabel berikut.
Tabel 1. Nilai Critical Clearing Time (CCT) untuk Setiap
Titik Gangguan pada Sistem 3 Generator-9 Bus.
Jika dibandingkan dengan simulation method dan
Controlling Unstable Equilibrium Point (CUEP) maka, nilai critical clearing time (CCT) dengan menggunaakan Shadowing Method tidak berbeda jauh.
Tabel 2. Perbandingan Nilai Critical Clearing Time (CCT)
Menggunakan Controlling Unstable Equilibrium Point
(CUEP), simulation method dan Shadowing Method sistem
3 Generator-9 Bus. ~ ~ G3 G1 G2 1 4 5 6 2 7 8 9 3 A G F I H C E D ~ B
Berdasarkan data dari tabel 1., dapat dilihat pada titik gangguan F, energi kritis (VPE) lebih besar dari nilai energy
function pada saat gangguan. Sedangkan pada titik
gangguan H, dapat dilihat energi kritis (VPE) lebih kecil dari nilai energy function pada saat gangguan, akan tetapi nilainya tidak konvergen karena exit point tidak ditemukan [11] meskipun pada tabel 2. diperoleh nilai CCT pada metode Controlling Unstable Equilibrium Point (CUEP). Terlihat juga bahwa dengan metode Shadowing semua nilai konvergen karena exit point ditemukan dan nilai Critical
Clearing Time (CCT) bisa diperoleh dan ini membuktikan
bahwa metode Shadowing telah memperbaiki keakuratan dari metode Controlling Unstable Equilibrium Point
(CUEP). Sedangkan simulation method pada titik F dan H
juga konvergen dan terdapat CCT, namun dibanding metode
Shadowing waktu perhitungan numerikal/iterasi rata-rata
diperoleh sekitar 1,1933 (s) lebih cepat dari simulation
method dan akurat melihat pada perbedaan nilai CCT sekitar
0,054 (s) hingga 0,055 (s).
Berdasar referensi [11], exit point dari metode metode
Controlling Unstable Equilibrium Point (CUEP) atau BCU (Boundary Controlled Unstable) method, pada kondisi CUEP tidak konvergen disebabkan tidak ditemukannya nilai Minimum Gradien Point (MGP) dari exit point sebagai
inisial kondisi, sedangkan pada metode Shadowing tidak memerlukan nilai dari MGP yang tidak dicari, tapi memanfaatkan exit point sebagai titik inisial awal (θm0) yang
kemudian dengan sistem Gradien yang terus-menerus mengintegrasikan titik inisial awal (θmi) sampai CUEP
diperoleh dan CCT dapat dihitung.
Berdasarkan tabel 4.8, metode Shadowing membutuhkan waktu perhitungan numerikal/iterasi rata-rata sekitar 0,1109 (s) lebih cepat dari Controlling Unstable Equilibrium Point
(CUEP) dan akurat melihat perbedaan nilai CCT 0,0545 (s). C. Perhitungan Critical Clearing Time (CCT) untuk Setiap
Titik Gangguan Pada Sistem 6 Generator-30 Bus
Gambar 5. Sistem 6 Generator-30 Bus.
Dari sistem tersebut, telah ditentukan letak dari titik gangguan. Dimana terdapat 10 titik gangguan yang telah ditentukan.
A : titik gangguan antara bus 1 dan bus 2 B : titik gangguan antara bus 1 dan bus 3 C : titik gangguan antara bus 2 dan bus 4 D : titik gangguan antara bus 2 dan bus 5 E : titik gangguan antara bus 2 dan bus 6 F : titik gangguan antara bus 5 dan bus 7 G : titik gangguan antara bus 8 dan bus 6 H : titik gangguan antara bus 8 dan bus 28 I : titik gangguan antara bus 11 dan bus 9 J : titik gangguan antara bus 13 dan bus 16
Critical Clearing Time (CCT) didapat dengan cara
menghitung durasi waktu antara SEP (Stable Equilibrium
Point) setelah gangguan hingga exit point. Dimana, exit point merupakan titk batas kestabilan sistem yang
direpresentasikan dari energi kritis setelah terjadinya gangguan. Fungsi dari energi kritis ini terjadi pada saat energi kinetik bernilai nol dan pada saat energi potensial paling rendah. Hal tersebut dapat dilustrasikan seperti pada gambar 5.
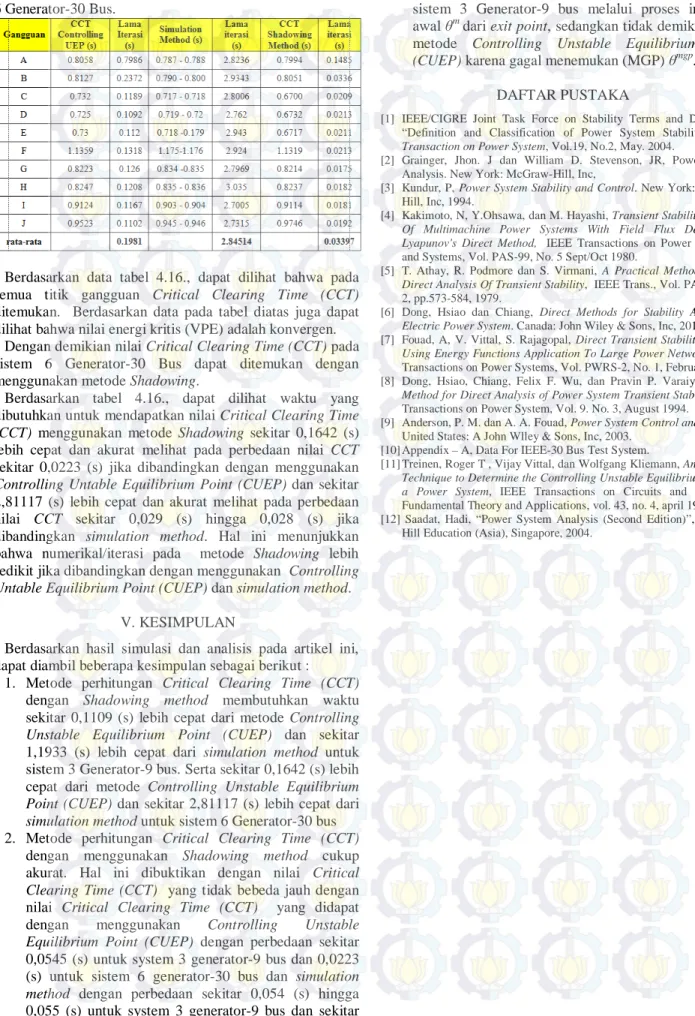
Gambar 6. Nilai Energy Function untuk setiap titik
gangguan pada Sistem 6 Generator -30 Bus.
Berdasarkan gambar diatas dapat dilihat bahwa nilai energi kritis pada setiap titik gangguan konvergen, sehingga semua nilai Critical Clearing Time (CCT) pada setiap titik gangguan dapat dicari.
Tabel 3. Nilai Critical Clearing Time (CCT) Untuk Setiap
Titik Gangguan pada Sistem 6 Generator-30 Bus.
~ ~ ~ ~ ~ 1 13 6 4 3 2 11 10 12 9 7 5 29 30 8 25 28 27 21 20 24 26 22 18 15 19 14 23 17 16 ~ J F D E C B A H G I
Tabel 4. Perbandingan nilai Critical Clearing Time (CCT)
menggunakan Controlling Unstable Equilibrium Point
(CUEP), simulation method dan Shadowing Method Sistem
6 Generator-30 Bus.
Berdasarkan data tabel 4.16., dapat dilihat bahwa pada semua titik gangguan Critical Clearing Time (CCT) ditemukan. Berdasarkan data pada tabel diatas juga dapat dilihat bahwa nilai energi kritis (VPE) adalah konvergen.
Dengan demikian nilai Critical Clearing Time (CCT) pada sistem 6 Generator-30 Bus dapat ditemukan dengan menggunakan metode Shadowing.
Berdasarkan tabel 4.16., dapat dilihat waktu yang dibutuhkan untuk mendapatkan nilai Critical Clearing Time
(CCT) menggunakan metode Shadowing sekitar 0,1642 (s)
lebih cepat dan akurat melihat pada perbedaan nilai CCT sekitar 0,0223 (s) jika dibandingkan dengan menggunakan
Controlling Untable Equilibrium Point (CUEP) dan sekitar
2,81117 (s) lebih cepat dan akurat melihat pada perbedaan nilai CCT sekitar 0,029 (s) hingga 0,028 (s) jika dibandingkan simulation method. Hal ini menunjukkan bahwa numerikal/iterasi pada metode Shadowing lebih sedikit jika dibandingkan dengan menggunakan Controlling
Untable Equilibrium Point (CUEP) dan simulation method.
V. KESIMPULAN
Berdasarkan hasil simulasi dan analisis pada artikel ini, dapat diambil beberapa kesimpulan sebagai berikut :
1. Metode perhitungan Critical Clearing Time (CCT) dengan Shadowing method membutuhkan waktu sekitar 0,1109 (s) lebih cepat dari metode Controlling
Unstable Equilibrium Point (CUEP) dan sekitar
1,1933 (s) lebih cepat dari simulation method untuk sistem 3 Generator-9 bus. Serta sekitar 0,1642 (s) lebih cepat dari metode Controlling Unstable Equilibrium
Point (CUEP) dan sekitar 2,81117 (s) lebih cepat dari simulation method untuk sistem 6 Generator-30 bus
2. Metode perhitungan Critical Clearing Time (CCT) dengan menggunakan Shadowing method cukup akurat. Hal ini dibuktikan dengan nilai Critical
Clearing Time (CCT) yang tidak bebeda jauh dengan
nilai Critical Clearing Time (CCT) yang didapat dengan menggunakan Controlling Unstable
Equilibrium Point (CUEP) dengan perbedaan sekitar
0,0545 (s) untuk system 3 generator-9 bus dan 0,0223 (s) untuk sistem 6 generator-30 bus dan simulation
method dengan perbedaan sekitar 0,054 (s) hingga
0,055 (s) untuk system 3 generator-9 bus dan sekitar 0,029 (s) hingga 0,028 (s) untuk sistem 6 generator-30 bus.
3. Pada kasus sistem 3 generator-9 bus Shadowing
method terbukti dapat memperbaiki kegagalan dalam
penentuan CCT pada titik F dan H konvergen untuk sistem 3 Generator-9 bus melalui proses inisialisai awal θm dari exit point, sedangkan tidak demikian pada metode Controlling Unstable Equilibrium Point
(CUEP) karena gagal menemukan (MGP) θmgp
. DAFTAR PUSTAKA
[1] IEEE/CIGRE Joint Task Force on Stability Terms and Definitions, “Definition and Classification of Power System Stability,” IEEE
Transaction on Power System, Vol.19, No.2, May. 2004.
[2] Grainger, Jhon. J dan William D. Stevenson, JR, Power System Analysis. New York: McGraw-Hill, Inc,
[3] Kundur, P, Power System Stability and Control. New York: McGraw-Hill, Inc, 1994.
[4] Kakimoto, N, Y.Ohsawa, dan M. Hayashi, Transient Stability Analysis
Of Multimachine Power Systems With Field Flux Decays Via Lyapunov's Direct Method, IEEE Transactions on Power Apparatus
and Systems, Vol. PAS-99, No. 5 Sept/Oct 1980.
[5] T. Athay, R. Podmore dan S. Virmani, A Practical Method For The
Direct Analysis Of Transient Stability, IEEE Trans., Vol. PAS-98, No.
2, pp.573-584, 1979.
[6] Dong, Hsiao dan Chiang, Direct Methods for Stability Analysis of
Electric Power System. Canada: John Wiley & Sons, Inc, 2011.
[7] Fouad, A, V. Vittal, S. Rajagopal, Direct Transient Stability Analysis
Using Energy Functions Application To Large Power Networks, IEEE
Transactions on Power Systems, Vol. PWRS-2, No. 1, February 1987. [8] Dong, Hsiao, Chiang, Felix F. Wu, dan Pravin P. Varaiya, A BCU
Method for Direct Analysis of Power System Transient Stability, IEEE
Transactions on Power System, Vol. 9. No. 3, August 1994.
[9] Anderson, P. M. dan A. A. Fouad, Power System Control and Stability. United States: A John Wlley & Sons, Inc, 2003.
[10] Appendix – A, Data For IEEE-30 Bus Test System.
[11] Treinen, Roger T , Vijay Vittal, dan Wolfgang Kliemann, An Improved
Technique to Determine the Controlling Unstable Equilibrium Point in a Power System, IEEE Transactions on Circuits and Systems-i:
Fundamental Theory and Applications, vol. 43, no. 4, april 1996. [12] Saadat, Hadi, “Power System Analysis (Second Edition)”,