Dalam sistem tenaga listrik dikenal dua jenis beban yaitu beban linier dan beban tidak linier. Bentuk gelombang keluaran beban linier memiliki arus yang mengalir sebanding dengan impedansi dan perubahan tegangan. Pada beban tidak linier, bentuk gelombang keluaran tidak sebanding dengan tegangan masuk sehingga bentuk gelombang arus maupun tegangan keluarannya tidak sama dengan gelombang masukannya.
2.1 Harmonisa
Beban tidak linier sekarang ini sudah tidak bisa dihindari lagi pemakaiannya dalam sistem tenaga listrik. Banyak industri yang memanfaatkan konverter dengan
thyristor dan rectifier, ataupun peralatan rumah tangga yang memanfaatkan
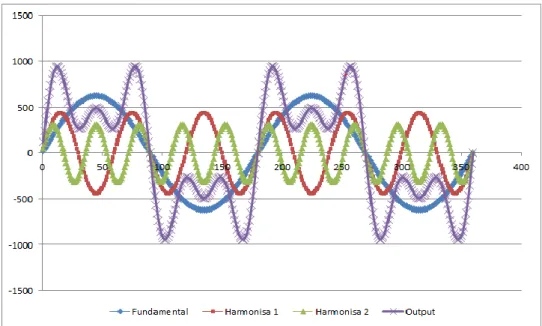
komponen seperti dioda, thyristor dan sebagainya. Beban-beban tersebut dapat menimbulkan distorsi bentuk gelombang arus maupun tegangan. Distorsi gelombang ini biasa disebut dengan harmonisa yang dapat dilihat pada Gambar 2.1.
Adanya harmonisa dapat menimbulkan permasalahan antara lain faktor daya rendah, overheating, dan dapat meningkatkan rugi-rugi energi [1,2]. Harmonisa juga dapat menurunkan kualitas sistem tenaga listrik yang dapat menyebabkan dampak negatif terhadap peralatan-peralatan lain pada instalasi. Oleh karena itu, pemakaian filter sedapat mungkin dapat mereduksi harmonisa masuk ke dalam jaringan.
Gambar 2.1 Distorsi gelombang harmonisa
Banyak usaha telah dilakukan untuk menyelesaikan masalah peredaman harmonisa, antara lain menggunakan filter pasif dan filter aktif. Filter pasif sering digunakan karena biaya pembuatan yang rendah dan strukturnya yang sederhana. Kelemahan filter ini tidak dapat menyelesaikan masalah yang ditimbulkan oleh variasi acak dari bentuk gelombang pada beban karena filter ini biasanya ditala pada frekuensi tertentu. Filter ini menghasilkan resonansi seri dan paralel dengan impedansi sumber [1].
Parameter untuk mengukur harmonisa ada dua yaitu, THDv (dalam persen) menunjukkan persentase jumlah total tegangan yang terdistrosi oleh harmonisa, dan THDi (dalam persen) menunjukkan prosentase jumlah total arus yang terdistrosi oleh harmonisa. Untuk menghitung kedua hal tersebut dapat menggunakan Persamaan (2.1) dan (2.2).
... (2.1) ...(2.2) Dengan: Vh : Tegangan harmonisa. Vs : Tegangan sistem Ih : Arus harmonisa
Isc : Arus hubung singkat
h : Harmonisa ke-n
Ii : Arus beban tidak linier
Total Harmonic Distortion (THDi) untuk arus didefinisikan dengan Persamaan (2.3):
√∑ ...,... (2.3)
Dengan:
Ih = Komponen harmonisa arus ke-h
THDv untuk tegangan didefinisikan dengan Persamaan (2.4):
√∑
... (2.4)
Dengan:
Vh = Komponen harmonisa tegangan ke-h
V1 = Tegangan frekuensi fundamental (rms)
Standar THD Arus dan THD Tegangan yang digunakan dalam penelitian ini menggunakan standar IEEE 519 - 1992.
2.2 Total Harmonic Distortion
Menurut Standar IEEE 519 – 1992, untuk total harmonic distortion tegangan diperlihatkan pada Tabel 2.1.
Tabel 2.1 Batas harmonisa tegangan sesuai standar IEEE 519-1992
Bus Voltage at PCC Individual Voltage Distortion (%) THD (%)
Kurang dari 69 kV 3,0 5,0
69,001 kV s/d 161 kV 1,5 2,5
Lebih dari 161,001 kV 1,0 1,5
Sementara itu, untuk harmonisa arus dapat dilihat pada Tabel 2.2. Semua peralatan sistam tenaga dibatasi sesuai dengan besar distorsi arus tersebut. Dengan ISC
adalah arus maksimum hubung singkat PCC (Point Common Coupling) dan IL adalah
arus maksimum permintaan beban (komponen frekuensi fundamental) di PCC.
Tabel 2.2 Batas harmonisa arus sesuai standar IEEE519-1992
Maximun Harmonic Current Distortion in Percent of IL
ISC/IL
Individual Harmonic Order (Odd Harmonic)
< 11 11 ≤ h ≤ 17 17 ≤ h ≤ 23 23 ≤ h ≤ 35 35 ≤ h THD (%) < 20 4 2,0 1,5 0,6 0,3 5,0 20 – 50 7 3,5 2,5 1,0 0,5 8,0 50 – 100 10 4,5 4,0 1,5 0,7 12,0 100 – 1000 12 5,5 5,0 2,0 1,0 15,0 >1000 15 7,0 6,0 2,5 1,4 20,0 2.3 Filter Pasif
Efek distorsi gelombang sinusoidal pada sistem menyebabkan terjadinya resonansi. Adanya kapasitor pada jaringan sistem tegangan rendah yang biasanya dipakai untuk memperbaiki faktor daya, dapat menimbulkan resonansi pada sistem lokal yang diikuti dengan naiknya arus yang sangat besar yang merugikan kapasitor itu sendiri. Resonansi pada sistem dibagi 2 yaitu resonansi paralel dan resonansi seri.
a. Resonansi Seri
Impedansi total pada frekuensi resonansi sangat kecil sehingga komponen sirkuit hanya mengandung resistansi dan harga arus akan sangat besar pada frekuensi tersebut. Pada kondisi resonansi seri, arus kapasitor yang tinggi dapat mengalir untuk tegangan harmonisa yang relatif kecil.
b. Resonansi Paralel
Impedansi total pada frekuensi resonansi sangat besar (secara teoritis cenderung tidak terhingga). Kondisi ini dapat menghasilkan tegangan lebih yang besar di antara elemen hubungan paralel walaupun pada arus harmonisa kecil. Resonansi paralel dapat terjadi pada beberapa kondisi seperti ketika sebuah kapasitor dihubungkan pada busbar yang sama dengan sumber harmonisa. Dengan asumsi bahwa sumber harmonisa bersifat induktif.
Untuk menentukan keluaran filter pasif, inverter terlebih dahulu ditala pada salah satu frekuensi biasanya pada frekuensi harmonisa ketiga atau harmonisa kelima (tergantung orde mana yang dominan) untuk menentukan kualitas dari filter (Q).
2.4 Filter Aktif
Filter aktif adalah perangkat elektronik yang bisa memperbaiki kualitas daya yang dikirimkan dari sumber ke beban. Konsep filter aktif shunt adalah bekerja
dengan menyuntikan arus yang berlawanan fasanya dengan arus harmonisa pada sistem sehingga mengurangi distorsi harmonisa pada sistem tenaga listrik. Tabel 2.3 menunjukkan beberapa aplikasi filter aktif sesuai dengan permasalahan kualitas daya.
Tabel 2.3 Aplikasi filter aktif tergantung pada permasalahan kualitas daya Konfigurasi
Filter
Efek Beban terhadap Suplai Arus Bolak Balik
Efek Suplai Arus Bolak-Balik terhadap Beban
Shunt
- Memfilter Arus Harmonisa - Kompensasi Arus Reaktif - Arus Tak Seimbang - Flicker Tegangan
Seri
- Memfilter Arus Harmonisa - Kompensasi Arus Reaktif - Arus Tak Seimbang - Tegangan Flicker - Tegangan tak seimbang
- Tegangan Sag/Swell - Tegangan Tak Seimbang - Distorsi Tegangan - Tegangan Notching - Tegangan Flicker
Seri – Shunt
- Filter Arus Harmonisa - Kompensasi Arus Reaktif
- Arus Tak Seimbang - Tegangan Flicker - Tegangan tak seimbang
- Tegangan Sag/Swell - Tegangan Tak Seimbang
- Distorsi Tegangan - Notching Tegangan - Tegangan Flicker
Sekurang-kurangnya komponen utama yang terdapat pada filter aktif adalah inverter dan controller [3].
2.4.1 Inverter
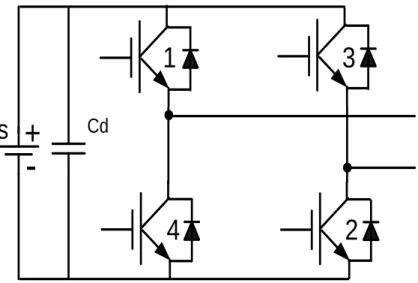
Definisi secara umum dari inverter adalah peralatan elektronika daya yang berfungsi mengubah tegangan searah (DC) menjadi tegangan bolak-balik (AC). Tipe inverter ada dua jenis yaitu inverter sumber tegangan (VSI) dan inverter sumber arus (CSI). Pada konfigurasi inverter VSI terdapat tegangan sumber Vs dan kapasitor Cd yang digunakan sebagai sumber dari
thyristor seperti diperlihatkan pada Gambar 2.2.
a
n
Vs
Cd
1
3
4
2
+
-Gambar 2.2 Konfigurasi inverter VSI
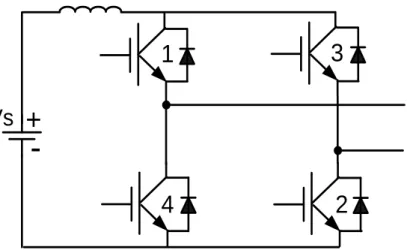
Tipe VSI ini sering digunakan karena implementasinya yang mudah dan murah serta memiliki performansi yang cukup baik. Sementara itu, untuk inverter CSI pada dc bus dilengkapi dengan induktor seperti yang diperlihatkan pada Gambar 2.3.
a
n
Vs
1
3
4
2
+
-Gambar 2.3 Konfigurasi inverter CSI
2.4.1 Controller
Controller digunakan dalam rangkaian filter aktif sebagai pembangkit
sinyal yang dipakai untuk menyalakan atau mematikan inverter. Komponen ini memegang peranan sangat penting di dalam implementasi filter aktif, karena ketika fungsi controll ini tidak bekerja dengan baik maka otomatis performansi filter aktif menjadi tidak maksimal. Kemungkinan terburuk adalah filter justru menambah masalah.
2.5 Multilevel Inverter
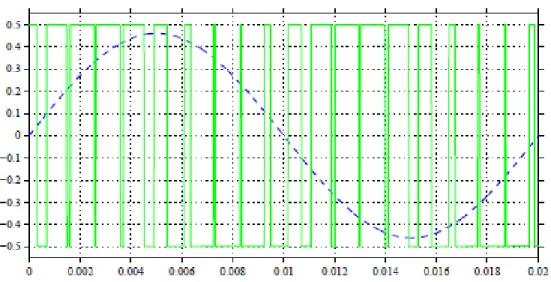
Pada awalnya inverter konvensional memiliki konfigurasi dua tingkat untuk menghasilkan tegangan AC dari tegangan DC seperti diperlihatkan pada Gambar 2.4. Dua tingkat inverter hanya bisa membangkitkan dua level tegangan output untuk
Gambar 2.4 Inverter dua level satu fasa (kiri) dan gelombang keluaran (kanan)
Untuk membangkitkan keluaran tegangan AC dua tingkat seperti pada Gambar 2.5, biasanya dilakukan dengan memodulasi lebar pulsa atau lebih dikenal dengan PWM (Pulse Width Modulation). Metode ini efektif dalam menghasilkan gelombang keluaran tetapi terdapat distorsi harmonik pada tegangan keuarannya. Hal ini mungkin tidak selalu menjadi masalah, tetapi untuk beberapa aplikasi tertentu dibutuhkan distorsi rendah dalam output tegangan [12].
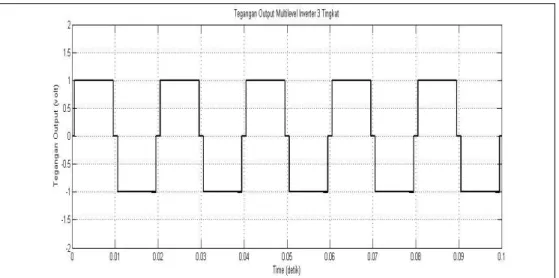
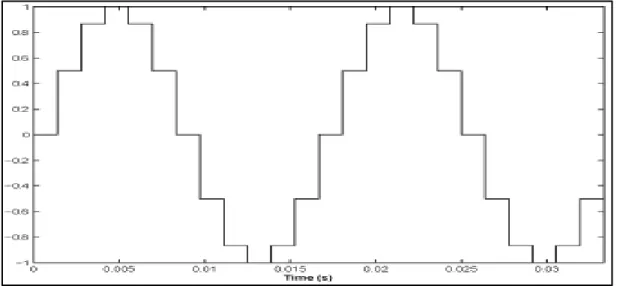
Konsep Multilevel Inverter (MLI) untuk menghasilkan sinyal AC tidak hanya bergantung pada dua tingkat tegangan. Beberapa tingkat tegangan dapat ditambahkan untuk menciptakan gelombang yang semakin halus, dengan menghasilkan distorsi harmonisa yang rendah. Gambar 2.6 menunjukkan tegangan keluaran untuk tiga tingkat, dan Gambar 2.7 untuk lima tingkat.
Gambar 2.6 Tegangan keluaran Multilevel Inverter 3 tingkat
Pada Gambar 2.8 yang merupakan tegangan untuk level tujuh tingkat, terlihat semakin banyak level tegangan yang dihasilkan maka gelombang akan semakin mendekati sinusoidal. Akan tetapi dengan berbagai tingkatan tersebut desain akan menjadi lebih rumit, lebih banyak komponen dan metode kontrol lebih sulit.
Gambar 2.8 Tegangan keluaran Multilevel Inverter 7 tingkat
Ada beberapa fitur menarik dalam multilevel inverter yaitu dengan tingkat frekuensi yang lebih rendah maka tingkat stress komponen juga bisa dihindari.. Berikut keuntungan menggunakan multilevel inverter [12,13]:
1. Multilevel Inverter dapat menghasilkan tegangan keluaran dengan distorsi yang sangat rendah
2. Multilevel Inverter dapat menghasilkan arus masukan dengan distorsi yang sangat rendah.
3. Multilevel Inverter menghasilkan lebih kecil tegangan common-mode (CM), sehingga mengurangi stres.
4. Multilevel Inverter dapat beroperasi dengan frekuensi switching yang lebih rendah
Ada berbagai topologi multilevel inverter yang telah diusulkan beberapa tahun terakhir seperti ditunjukkan pada Gambar 2.9 [13]. Berikutnya akan lebih difokuskan pembahasan untuk Multilevel Inverter dengan sumber DC yang simetris, sesuai dengan yang digunakan pada tesis ini.
A. Diode Clamped Connected
Topologi multilevel inverter yang paling umum digunakan adalah “diode clamped connected”, yaitu dioda digunakan sebagai perangkat untuk menjepit tegangan bus DC sehingga mencapai level output voltage.
Gambar 2.9 Klasifikasi topologi Cascade Multilevel Inverter
Cascade Multilevel Inverter Berdasarkan Koneksi H-Bridges Koneksi
Bintang Koneksi Delta
Berdasarkan Sumber DC Sumber DC Asimetris Sumber DC Simetris H-Bridge Connected Flying Capacitor Connected Diode Clamped Connected
Beberapa kebutuhan komponen inverter tingkat n adalah:
a. Sumber tegangan (bisa berupa kapasitor) = (n - 1)
b. Perangkat switching (berupa relay) = 2 (n - 1)
c. Dioda = (n - 1) (n - 2)
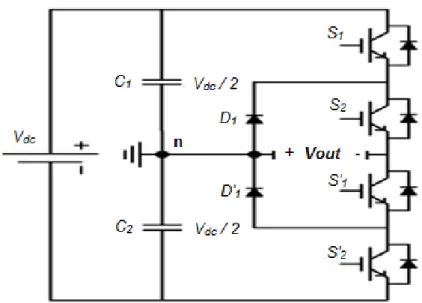
Dengan meningkatnya jumlah level tegangan, kualitas tegangan keluaran menjadi lebih dekat dengan gelombang sinusoidal. Gambar 2.10 menunjukkan topologi diode-clamped tiga tingkat (a) dimana bus DC terdiri dari dua kapasitor,
yaitu C1 dan C2. Tegangan di setiap kapasitor terpasang sebesar VDC / 2.
Gambar 2.10 Topologi Multilevel Inverter Diode-Clamped
Untuk menjelaskan bagaimana level tegangan dibangkitkan, titik netral n dianggap sebagai keluaran fasa titik referensi tegangan. Kombinasi komponen switch bisa dilihat pada Tabel 2.4.
Tabel 2.4 Kombinasi switch untuk menghasilkan variasi tegangan keluaran
Level Voutput S1 S2 S1’ S2’
1 Vdc/2 1 1 0 1
0 0 0 1 1 0
-1 -Vdc/2 0 0 1 1
Untuk menentukan nilai dari VD bisa digunakan Persamaan 2.5 [14].
...(2.5)
Dengan:
m = nilai tingkat inverter
k = konstanta dari 1 sampai (m-1)
Vdc = Tegangan DC link
B. H-Bridge Cascaded Multilevel Inverter
Konsep inverter ini adalah menghubungkan inverter H-bridge secara seri untuk mendapatkan tegangan keluaran. Tegangan keluaran adalah jumlah dari tegangan yang dihasilkan oleh masing-masing tingkat. Jumlah tersebut merupakan tegangan output tingkat 2n +1, dengan n adalah jumlah tingkat.
Salah satu keuntungan dari jenis inverter multilevel ini adalah mengurangi jumlah komponen dibandingkan dengan diode-clamp maupun
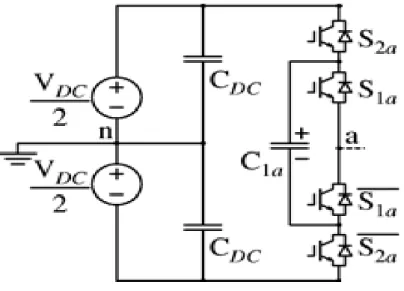
C. Multilevel Inverter Flying Capacitor
Struktur inverter ini mirip dengan diode-clamped, bedanya adalah komponen dioda digantikan oleh kapasitor seperti pada Gambar 2.11. Inverter
n-level akan membutuhkan:
a. Kapasitor untuk masing-masing fasa = (n - 1) × (n - 2) / 2
b. Kapasitor utama = (n - 1)
Jika dibandingkan dengan metode diode clamp, jumlah kapasitor pada type ini jauh lebih banyak karena komponen untuk dioda digantikan oleh kapasitor. Lain halnya untuk sumber tegangan membutuhkan jumlah komponen yang sama yaitu sebesar n-1.
2.6 Transformasi p-q
Filtering merupakan suatu proses untuk mendapatkan sinyal arus harmonisa
dengan cara memfilter sinyal arus dan tegangan pada sistem. Sinyal arus dan tegangan pada sistem memiliki dua komponen yaitu sinyal fundamental pada frekuensi 50 Hz dan sinyal harmonisa dengan frekuensi kelipatan bilangan bulat dari frekuensi fundamental sistem. Untuk mengidentifikasi harmonisa arus digunakan p-q
theory [8,9,15].
2.6.1 Low Pass Filter
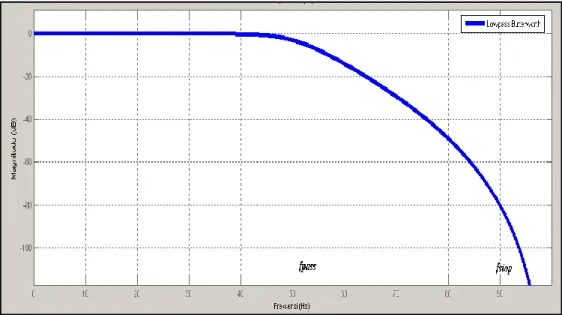
Filter adalah adalah sebuah rangkaian yang dirancang agar melewatkan suatu pita frekuensi tertentu dan pada saat yang bersamaan melemahkan sinyal yang diluar frekuensi tersebut. Pengertian lain dari filter adalah rangkaian pemilih frekuensi agar dapat melewatkan frekuensi yang diinginkan dan menahan atau membuang (by pass) frekuensi lainnya. Adapun jenis filter antara lain adalah Low Pass Filter (LPF), jenis filter yang melewatkan frekuensi rendah serta meredam/menahan frekuensi tinggi. Bentuk respon LPF seperti ditunjukkan Gambar 2.12.
Selain LPF masih ada beberapa tipe dari filter tergantung dari kebutuhan dan fungsi masing-masing filter, misalnya High Pass Filter (melewatkan frekuensi tinggi dan meredam frekuensi yang rendah), Band
Pass Filter, atau Band Stop Filter. Pemilihan konfigurasi filter tersebut
Gambar 2.12 Respon magnitudo LPF
LPF digunakan untuk membatasi frekuensi paling tinggi dari suatu sinyal. LPF akan melewatkan frekuensi rendah atau dengan kata lain LPF akan memberikan tegangan keluaran yang konstan dari DC hingga frekuensi
cutoff (frekuensi 0,707 atau frekuensi -3dB). Area frekuensi LPF dapat dibagi
menjadi tiga. Pertama, area perpanjangan passband dari 0 sampai frekuensi tepi passband nya (fpass). Kedua, area perpanjangan stopband dari frekuensi tepi stopband (fstop) sampai tak terbatas. Kemudian yang ketiga adalah daerah transisi antara keduanya, antara fpass dan fstop.
Pada tesis ini digunakan LPF dengan frekuensi yang dilewatkan adalah sebesar 50Hz, sedangkan frekuensi yang lebih tinggi (harmonisanya) di tahan. Sedangkan orde yang digunakan adalah bernilai 5, orde ini berkaitan dengan
tingkat kecuraman dari filter. Semakin kecil nilainya (misalnya satu) maka filter akan semakin curam dan semakin besar nilainya akan semakin landai.
2.6.2 Implementasi transformasi Park
Tranformasi Park secara matematik biasanya digunakan pada mesin sinkron 3 fasa yaitu untuk menyerderhanakan transformasi variabel tertentu dari sistem 3 fasa abc ke sumbu dq0. Variabel tersebut biasanya berupa arus, tegangan atau fluks linkage dalam bentuk variabel aktual kumparan stator. Kuantitas baru didapatkan dari proyeksi variabel aktual pada ketiga sumbu sepanjang sumbu direct kumparan rotor yang disebut sumbu direct (d), dan sepanjang sumbu netral kumparan medan yang disebut sumbu quadrature atau disebut sumbu stasioner. Untuk memudahkan biasanya sumbu fasa a dianggap sebagai fasa referensi dan pergeseran sudut fasa referensi disebut θ.
Park transformasi (dq) adalah untuk menyederhanakan transformasi
semua kuantitas stator dari sumbu abc yang diubah kedalam referensi variabel baru yang disebut rotor. Jika kita mempunyai 3 variabel ia, ib dan ic maka kita perlu menggunakan 3 variabel baru sehingga dengan transformasi
Park menjadi 2 variabel baru yaitu variabel komponen id dan iq dan variabel
komponen ketiganya atau i0 adalah arus stationer yang sebanding dengan arus
urutan nol. Untuk ketiga fasa yang seimbang sumbu nol biasanya dianggap nol. Gambar 2.13 adalah pemodelan persamaan untuk proyeksi perkalian Transformasi Park [15].
Perhitungan p dan q Perhitungan Arus Referensi Low Pass Filter
ic1 ic2 ic3 vs1 vs2 vs3 iref1 iref2 iref3
p q qh ph
Gambar 2.13 Proses transformasi pq
Tegangan sumber (Vs1, Vs2, Vs3) dan arus sumber (ic1, ic2, ic3)
ditransformasikan menjadi sistem bi-phase menurut Persamaan (2.6):
[ ] √ [ √ √ ] [
] ...(2.6)
Daya aktif dan daya reaktif sesaat pada sistem dihitung berdasarkan Persamaan (2.7):
Setelah itu, untuk mendapatkan arus referensi harmonisa dilakukan transformasi sesuai dengan Persamaan (2.8):
[ ] [ ] [ ̃ ̃] ... (2.8)
Untuk mendapatkan arus referensi harmonisa yang sesungguhnya, maka arus harmonisa dalam sistem biphase harus ditransformasikan dengan invers dari transformasi α-β, dimana ditunjukkan pada Persamaan (2.9):
[ ] √ [ √ √ ] [ ] ...(2.9)
2.7 Fuzzy Logic Control
Gambar 2.14 merupakan Fuzzy Logic Controller (FLC) sebagai alternatif sistem kendali modern yang mudah karena tidak perlu dicari model matematis dari suatu sistem, tetapi tetap efektif karena memiliki respon sistem yang stabil. Logika
fuzzy berfungsi untuk mewakili sesuatu yang tidak pasti dan tidak tepat dari sistem,
sedangkan kontrol fuzzy memungkinkan untuk mengambil keputusan walaupun input atau output dari sistem tidak pasti dan tidak dapat diperkirakan.
Gambar 2.14 Diagram Fuzzy untuk pemodelan controller pada filter
Beberapa alasan penggunaan logika fuzzy antara lain [16,17] : a. Konsep logika fuzzy mudah dimengerti.
b. Logika fuzzy sangat fleksibel.
c. Logika fuzzy memiliki toleransi terhadap data yang tidak tepat. d. Logika fuzzy mampu memodelkan fungsi tidak linier yang kompleks.
e. Logika fuzzy dapat bekerjasama dengan teknik-teknik kendali secara konvensional.
Fuzzy logic controll adalah evaluasi seperangkat aturan linguistic sederhana
untuk menentukan aksi controll. Untuk mengembangkan aturan logika fuzzy, diperlukan pemahaman yang baik pada pengendalian proses dan keluaran. Logika
fuzzy tidak memerlukan pemodelan matematis yang rumit, yang diperlukan hanya
2.7.1 Proses Fuzzifikasi
Sebelum dilakukan proses fuzzifikasi, perlu diketahui beberapa istilah untuk mempermudah memahami sistem fuzzy.
a. Fungsi Keanggotaan
Fungsi keanggotaan adalah suatu kurva yang menunjukkan pemetaan titik-titik input data ke dalam nilai keanggotaannya (sering juga disebut derajat keanggotaan) yang memiliki interval antara 0 sampai 1.
b. Tinggi Himpunan Fuzzy dan Normalisasi
Tinggi himpunan fuzzy adalah derajat keanggotaan maksimumnya dan terikat pada konsep normalisasi. Dengan adanya konsep normalisasi ini didapatkan nilai maksimal untuk derajat keanggotaannya bernilai satu, dan derajat paling kecil bernilai nol.
c. Domain Himpunan Fuzzy
Merupakan keseluruhan nilai yang diijinkan dalam semesta pembicaraan. Domain merupakan himpunan bilangan real yang senantiasa naik (bertambah) secara monoton dari kiri ke kenan. Nilai domain dapat berupa bilangan positif maupun negatif.
d. Himpunan Penyokong
Terkadang bagian tidak nol dari suatu himpunan fuzzy tidak ditampilkan dalam domain, himpunan ini sering disebut dengan himpunan penyokong.
Setelah kita mengetahui himpunan fuzzy, maka kita juga harus tahu bagaimana himpunan fuzzy tersebut merepresentasikan pengetahuan. Ada beberapa model yang bisa digunakan dalam pembentukan proses fuzzifikasi
1. Representasi Linier
Pada representasi linier seperti pada Gambar 2.15, pemetaan input ke derajat keanggotaannya digambarkan sebagai suatu garis lurus. Bentuk ini paling sederhana dan menjadi pilihan yang baik untuk mendekati suatu konsep yang kurang jelas.
Ada 2 keadaan himpunan fuzzy yang linier. Pertama, kenaikan himpunan dimulai pada nilai domain yang memiliki derajat keanggotaan nol (0) bergerak ke kanan menuju ke nilai domain yang memiliki derajat keanggotaan lebih tinggi.
Fungsi keanggotaannya dapat dilihat pada Persamaan (2.10):
... (2.10)
Himpunan fuzzy yang linier kedua merupakan kebalikan dari yang pertama seperti terlihat pada Gambar 2.16. Garis lurus dimulai dari nilai domain dengan derajat keanggotaan tertinggi pada sisi kiri, kemudian bergerak menurun ke nilai domain yang memiliki derajat keanggotaan lebih rendah.
.
Gambar 2.16 Representasi linier turun Fungsi keanggotaannya dapat dilihat pada Persamaan (2.11):
2. Representasi Kurva Segitiga
Kurva segitiga pada dasarnya adalah gabungan antara 2 garis (linier) seperti terlihat pada Gambar 2.17.
Gambar 2.17 Kurva segitiga
Fungsi keanggotaannya dapat dilihat pada Persamaan (2.12):
... (2.12)
3. Representasi Kurva Trapesium
Gambar 2.18 adalah kurva trapesium, yang pada dasarnya seperti bentuk segitiga, hanya saja ada titik yang memiliki nilai keanggotaan satu. Oleh sebab itu, ada beberapa fungsi keanggotaan yang bernilai satu, tidak
seperti pada kurva segitiga yang hanya mempunyai satu titik yang bernilai satu.
Gambar 2.18 Kurva trapesium
2.7.2 Pembentukan aturan
Setiap aturan (proposisi) pada basis pengetahuan fuzzy akan berhubungan dengan suatu relasi fuzzy. Ada 2 jenis proposisi fuzzy, yaitu:
a. Conditional Fuzzy Proposition
Jenis ini ditandai dengan penggunaan pernyataan IF. Secara umum dapat diekspresikan
IF x is A THEN y is B
Dengan x dan y adalah skalar, sedangkan A dan B adalah variable
linguistic. Proposisi yang mengikuti IF disebut sebagai anteseden,
Proposisi ini dapat diperluas dengan menggunakan penghubung
fuzzy, seperti:
IF (x1 is A1) • (x2 is A2) • …… • (xN is AN) THEN y is B
Dengan (•) adalah operator (misal: OR atau AND)
Apabila suatu proposisi menggunakan bentuk terkondisi, maka ada 2 fungsi implikasi yang dapat digunakan, yaitu:
1. Min (minimum). Fungsi ini akan memotong keluaran himpunan
fuzzy.
2. Dot (product). Fungsi ini akan menskala keluaran himpunan fuzzy.
b. Unconditional Fuzzy Proposition
Jenis ini ditandai dengan tidak digunakannya pernyataan IF. Secara umum dapat diekspresikan:
x is A
Dengan x adalah skalar, dan A adalah variable linguistic.
Proposisi yang tidak terkondisi selalu diaplikasikan dengan model AND, tergantung pada bagaimana proposisi tersebut diaplikasikan, bisa membatasi daerah output, bisa juga mendefinisikan default daerah solusi (jika tidak ada aturan terkondisi yang dieksekusi).
Apabila sistem terdiri dari beberapa aturan, maka inferensi diperoleh dari kumpulan dan korelasi antar aturan. Ada 3 metode yang digunakan dalam melakukan inferensi sistem fuzzy, yaitu: max (maximum), additive dan probabilistic-OR (probor).
1. Metode Max (maximum)
Pada metode ini, solusi himpunan fuzzy diperoleh dengan cara mengambil nilai maksimum aturan, kemudian menggunakannya untuk memodifikasi daerah fuzzy, dan mengaplikasikannya ke keluaran dengan menggunakan operator OR (union). Jika semua proposisi telah dievaluasi, maka keluaran akan berisi suatu himpunan fuzzy yang merefleksikan kontribusi dari tiap-tiap proposisi. Secara umum dapat dituliskan:
[ ] [ ] [ ] Dengan:
[ ] nilai keanggotaan solusi fuzzy sampai aturan ke – i; [ ] nilai keanggotaan konsekuen fuzzy aturan ke – i ;
2. Metode Additive (sum)
Pada metode ini, solusi himpunan fuzzy diperoleh dengan cara melakukan bounded-sum terhadap semua output daerah fuzzy. Secara umum persamaannya dapat dituliskan sebagai berikut:
[ ] [ ] [ ] Dengan:
[ ] nilai keanggotaan solusi fuzzy sampai aturan ke – i; [ ] nilai keanggotan konsekuen fuzzy aturan ke – i ;
3. Metode Probabilistik-OR
Pada metode ini, solusi himpunan fuzzy diperoleh dengan cara melakukan product terhadap semua output daerah fuzzy. Secara umum dituliskan sebagai berikut:
[ ] ( [ ] [ ]) [ ] [ ]
Dengan:
[ ] nilai keanggotaan solusi fuzzy sampai aturan ke – i; [ ] nilai keanggotan konsekuen fuzzy aturan ke – i ;
2.7.3 Proses Defuzzifikasi
Input dari proses defuzzifikasi adalah suatu himpunan fuzzy yang diperoleh dari komposisi aturan fuzzy, sedangkan output yang dihasilkan merupakan suatu bilangan pada domain himpunan fuzzy tersebut. Apabila
diberikan suatu himpunan fuzzy dalam range tertentu, maka harus dapat diambil suatu nilai crisp tertentu sebagai keluaran.
Ada beberapa metode defuzzifikasi pada komposisi aturan MAMDANI, antara lain:
a. Metode Centroid (Composite Moment)
Pada metode ini, solusi crisp diperoleh dengan cara mengambil titik pusat daerah fuzzy. Secara umum dirumuskan pada Persamaan (2.13) dan (2.14): ∫ ∫ ... (2.13) Atau: ∑ ∑ ... (2.14)
Ada 2 keuntungan menggunakan metode centroid, yaitu:
1. Nilai defuzzy akan bergerak secara halus sehingga perubahan dari suatu topologi himpunan fuzzy juga akan berjalan dengan halus
2. Perhitungan yang sederhana dan mudah
b. Metode Bisektor
Pada metode ini, solusi crisp diperoleh dengan cara mengambil nilai pada domain fuzzy yang memiliki nilai keanggotaan setengah dari
jumlah total nilai keanggotaan pada daerah fuzzy. Secara umum dapat dituliskan seperti pada Persamaan (2.15):
∫ ∫ ...(2.15)
c. Metode Mean of Maximum
Pada metode ini, solusi crisp diperoleh dengan cara mengambil nilai rata-rata domain yang memiliki nilai keanggotaan maksimal.
d. Metode Largest of Maximum
Pada metode ini, solusi crisp diperoleh dengan cara mengambil nilai terbesar dari domain yang memiliki nilai keanggotaan maksimal. e. Metode Smallest of Maximum
Pada metode ini, solusi crisp diperoleh dengan cara mengambil nilai terkecil dari domain yang memiliki nilai keanggotaan maksimal.
2.8 Desain Sistem
Pada Gambar 2.19, sumber yang dibebani oleh sistem baik yang linier maupun tidak linier terdiri dari arus fundamental dan harmonisa, yaitu IS_A, IS_B, IS_C. Gelombang tersebut akan diproses dengan menggunakan transformasi pq, sehingga akan didapatkan komponen fundamental dan juga komponen harmonisanya. Setelah didapatkan komponen harmonisanya, kemudian diproses dengan menjumlahkan arus yang diinjeksikan oleh filter (closed loop). Fuzzy logic controller sendiri digunakan untuk mempertahankan nilai tegangan yang berubah, dimana output dari fuzzy ini
akan diolah oleh blok hysteresis controll untuk menghasilkan pulsa. Pulsa ini yang berfungsi untuk menyalakan atau mematikan switch dari inverter 3 tingkat.
TRANSFORMASI pq
HISTERESIS INVERTER TIGA TINGKAT IS_A IS_B IS_C Ih_A Ih_B Ih_C Pulse eI_C eI_B eI_A Iinj_B Iinj_A Iinj_C SUMBER + + + BEBAN LINEAR BEBAN NON LINEAR - - -FUZZY LOGIC CONTROLLER
Gambar 2.19 Prinsip algoritma filter aktif
Arus yang dihasilkan dari inverter tiga tingkat besarnya sama dengan arus harmonisa tetapi berlawanan fasa, sehingga nantinya bisa saling menghilangkan. Kalau tidak ada arus harmonisa yang timbul, error yang dihasilkan juga akan bernilai nol. Sehingga arus yang di injeksikan juga akan bernilai nol.
a. Pemodelan Sistem Menggunakan Matlab
Simulasi sistem dengan menggunakan Software Matlab. Berikut adalah pemodelan simulasi seperti pada Gambar 2.20.
Gambar 2.20 Pemodelan simulasi tanpa filter
2.9.1 Sumber
Gambar 2.21 merupakan model dari sumber 3 fasa yang merupakan sumber dari beban yang akan di supply. Frekuensi 50 Hz dengan nilai RMS (root mean square) tegangan sebesar 400 Volt. Dimana kondisi dianggap setimbang untuk masing-masing fasa dengan beban dalam kondisi steady
state. Untuk beban nya sendiri diklasifikasikan menjadi dua bagian yaitu
beban yang sifatnya linier dan beban yang tidak linier. Pemodelan dari masing-masing beban tersebut diambil dari data-data yang ada di jurnal referensi, bukan dari hasil pengukuran.
Gambar 2.21 Pemodelan sumber 3 fasa
2.9.2 Impedansi saluran
Gambar 2.22 merupakan pemodelan impedansi saluran, dimana parameter yang harus diisikan adalah resistansi (Ohm) dan induktansi (H).
2.9.3 Pemodelan Beban Tidak Linier
Gambar 2.23 adalah pemodelan beban tidak linier yang diwakili dengan komponen dioda. Parameter beban tidak linear diambil dari referensi [18].
Gambar 2.23 Pemodelan beban
2.9.4 Blok FLC Controller
Matlab sendiri menyediakan block untuk membuat sistem inferensi
fuzzy (FIS) bernama Fuzzy Logic Toolbox (FLT) seperti pada Gambar 2.24.
FLT memiliki 5 jenis GUI (Graphic User Interface) untuk merancang FIS: 1. FIS Editor merupakan jendela bagi sistem fuzzy yang akan dibuat. 2. Membership Function Editor berfungsi untuk membentuk variabel
dari masukan yang akan kita konversi ke himpunan fuzzy.
I_load 2 V _load 1 c 3 b 2 a 1 Zt A B C A B C V-I meas .1 Vabc Iabc A B C a b c v + -v + -v + -V M v + -A B C a b c A B C a b c Id 1 i + -Ic3 i +-Ib3 i +-Ia 3 i +-Id
Gambar 2.24 Feature Fuzzy Inference System pada Matlab
3. Rule Editor digunakan untuk membentuk aturan dari masukan dan keluaran yang diinginkan.
4. Rule Viewer berguna untuk membentuk visualisasi dari aturan yang sudah kita buat pada rule editor.
5. Surface Viewer adalah gambaran berbentuk 3 dimensi yang bisa menunjukkan aturan dan fungsi keanggotaan yang sudah dibuat.
Fuzzy logic controller yang digunakan menggunakan beberapa
mekanisme sebagi berikut:
b. Fungsi keanggotaan menggunakan metode segitiga dan trapesium sebagai himpunan penyokong
c. Inferensi fuzzy menggunakan mekanisme Mamdani
d. Proses defuzifikasi menggunakan metode centroid
Tabel 2.5 menunjukkan aturan yang digunakan untuk mengolah sinyal masukan dan sinyal keluaran FLC pada tesis ini. Pada sistem MISO (Multi
Input Single Output) jumlah aturan yang dihasilkan adalah 5x5 = 25 untuk 5
set fuzzy dan 7x7 =49 untuk 7 set fuzzy.
Tabel 2.5 Aturan set fuzzy untuk 5 fungsi keanggotaan
d_error Error NL NS ZE PL PS NL BN N P P BP NS BN N P P BP ZE BN N ZE P BP PL BN N N P BP PS BN N N P BP Keteranga:
NL : Negative Large NS : Negative Small
ZE : Zero PS : Positif Small
PL : Positif Large BN : Big Negative
N : Negative ZE : Zero
Tabel 2.5 adalah variabel linguistic yang dibentuk dalam lima fungsi keanggotaan. Dimana masing-masing himpunan pada error dan delta error dibagi menjadi lima fungsi keanggotaan. Fungsi keanggotaan yang digunakan menggunakan metode segitiga, dengan bagian ujung merupakan himpunan penyokong menggunakan metode trapesium.
Gambar 2.25 merupakan jendela pada matlab yang muncul ketika kita menuliskan command “fuzzy” pada command window. Berikutnya dibuat masukan berupa himpunan dan aturan yang sesuai dengan desain.
Pada Gambar 2.26 di bawah ini terlihat fungsi keanggotaannya berbentuk kurva segitiga dan himpunan porosnya berbentuk kurva trapesium. Mengingat dalam algoritma fuzzy ini kita melakukan normalisasi terhadap nilai bilangan sehingga didapatkan nila amplitudo maksimal bernilai 1. Dimana nilai tersebut adalah nilai yang tertinggi, atau bisa juga disebut fungsi keanggotaan yang bersifat mutlak.
Selain menggunakan 5 fungsi keanggotaan, dibuat juga 7 fungsi keanggotaan seperti Tabel 2.6. Tujuannya untuk melihat pengaruh perubahan fungsi keanggotaan terhadap performansi filter aktif. Dengan menggunakan cara yang sama, tetapi dengan jumlah anggota himpunan yang lebih banyak, yang ditambahkan adalah “negatif medium” dan “positif medium”. Secara teoritis semakin banyak jumlah fungsi keanggotaan maka output yang akan dihasilkan juga lebih baik, karena dengan banyaknya fungsi berarti himpunan masukan dan keluaran menjadi lebih presisi.
Tabel 2.6 Aturan set fuzzy untuk 7 fungsi keanggotaan
d_error Error NL NM NS ZE PS PM PL NL NL NL NL NL NM NS ZE NM NL NL NL NM NS ZE PS NS NL NL NM NS ZE PS PM ZE NL NM NS ZE PS PM PL PS NM NS ZE PS PM PL PL PM NS ZE PS PM PL PL PL PL NL NM NS ZE PS PM PL Keterangan:
NL : Negative Large NM : Negative Medium
NS : Negative Small ZE : Zero
PS : Positif Small PM : Positif Medium PL : Positif Large
Gambar 2.27 adalah gambar fungsi keanggotaan yang metodenya sama dengan yang digunakan pada FLC 5 fungsi keanggotaan. Yaitu dengan menggunakan metode tringular, dengan kombinasi himpunan penyokong menggunakan metode trapesium.
Gambar 2.27 Tujuh membership function FIS Editor
2.9.5 Transformasi pq
Dalam implementasi transformasi pq ini digunakan tools Matlab
embedded function untuk implementasi persamaan yang sudah disebutkan di
tegangan dan sumber akan diproses di blok “clarke”. Di blok ini akan di konversi dari 3 fasa menjadi 2 variabel output, baik tegangan maupun arus dengan menggunakan persamaan [2.6]. Kemudian berikutnya baru akan digabungkan dan dikonversikan dengan menggunakan persamaan [2.7]. Setelah itu akan dilakukan proses filter dengan LPF untuk mendapatkan komponen fundamental dan harmonisanya. Setelah itu di bagian akhir dilakukan konversi lagi dari 2 variabel menjadi 3 variabel.
Gambar 2.28 Diagram blok untuk transformasi pq
ICabc 1 2 ICabc 1 Scope 4 Scope 3 Scope 2 Scope 1 PQ calculation x1 x2 y 1 y 2 P Q Valpha Vbeta PQ LPF butter Goto1 [Ic2] Goto [Ic1] Gain 1 1 Gain -1 From 1 [Ic2] From [Ic1] Compensation current Ic1 Ic2 ICa ICb ICc Ical CLARKE V u v w x y VCT CLARKE I u v w x y ICT
Alpha Beta current
Posc q V1 V2 Ic 1 Ic 2 ICOM Ploss 3 Iabc 2 Vs 1
2.9.6 Hysteresis Controller
Hysteresis controller seperti Gambar 2.29 ini digunakan untuk membangkitkan pulsa sebagai masukan dari inverter, yaitu dengan cara membandingkan nilai dari arus referensi dan arus yang terukur.
Gambar 2.29 Diagram blok untuk histeresis controll
Keluaran dari blok ini adalah berupa pulsa yang akan membangkitkan inverter apakah harus ON atau OFF. Kalau arus yang terukur lebih besar dari arus referensi, maka switch akan diperintahkan untuk ON, demikian juga sebaliknya. Kalau arus yang terukur lebih kecil dari arus referensi maka switch akan diperintahkan untuk OFF.
g 1 >= >= >= Logical Operator 3 NOT Logical Operator 2 NOT Logical Operator 1 NOT I_meas 2 I_ref 1
2.9.7 Multilevel Inverter
Penggunaan multilevel inverter yang berkembang sangat pesat, bisa digunakan pada block three-level bridge di Matlab dapat dilihat pada Gambar 2.30.
Gambar 2.30 Implementasi Multilevel Inverter tiga tingkat
Dimana untuk menentukan nilai dari kapasitor dan tegangan Vdc
referensi memanfaatkan Persamaan (2.16) [14]
...(2.16)
Dengan:
VD = Sumber tegangan inverter (bisa berupa kapasitor)
m = Level tegangan
k = Konstanta dari 1 sampai dengan (m-1) Vdc = Total dc link voltage (tegangan referensi)