Abstrak—Permasalahan dalam kendali pesawat salah
satunya adalah gangguan yang terjadi saat pesawat berada di ketinggian tertentu. Pada Tugas akhir ini akan dikaji beberapa cara pesawat untuk menyeimbangkan posisinya saat terjadi gangguan dengan torsi kecil. Dalam hal ini posisi pesawat pada koordinat bumi sangat penting untuk di diketahui. Dalam tugas akhir ini akan dikaji sebuah pesawat yang mengalami gangguan dengan torsi yang sangat kecil. Agar metode pengendalian juga bisa menstabilkan posisi pesawat dalam waktu yang cepat. Oleh karena itu digunakan sebuah metode Quaternion, yang banyak digunakan dalam permasalahan rotasi. Pada penelitian – penelitian sebelumnya sudah banyak digunakan pada spacecraft. Dalam Tugas akhir ini metode Quaternion digabungkan dengan metode Sliding Mode Control untuk menghasilkan sebuah rancangan kontrol yang mendukung posisi pesawat agar tetap seimbang diudara.
Kata kunci— attitude aircraft, position update, Sliding Mode
Control (SMC), dan Quaternion
I. PENDAHULUAN
Atematika merupakan salah satu disiplin ilmu yang mempunyai banyak aplikasi dalam kehidupan sehari-hari. Aplikasi matematika selanjutnya disebut sebagai matematika terapan. Dalam bidang matematika terapan banyak teori-teori matematika yang dapat diaplikasikan dalam kehidupan sehari-hari. Salah satunya adalah aplikasi matematika dalam dunia penerbangan. Definisi dari pesawat terbang (aircraft) itu sendiri adalah sebagai benda-benda yang dapat terbang, baik benda tersebut lebih ringan daripada udara (lighter than air) ataupun yang lebih berat daripada udara. Tetapi didalam makalah tugas akhir ini menitikberatkan permasalahan pada kontrol posisi pesawat terbang saat berada diudara agar bisa seimbang.
Ketepatan posisi dan orientasi pesawat terbang (aircraft), atau yang biasa disebut dengan attitude pesawat terbang, sangat penting untuk mendukung tujuan utama pesawat agar bisa mencapai posisi stabil diudara. Pesawat terbang mempunyai tiga sumbu putar, yaitu vertikal, longitudinal dan lateral. Gerakan pesawat pada sumbu vertikal disebut yaw. Dan gerakan pada sumbu lateral disebut pitch. Sedangkan gerakan pada sumbu longitudinal disebut roll. Masing-masing gerakan ini dikontrol oleh sistem kendali terbang (flight
control systems) dari pesawat, yaitu ruder, aileron dan elevator.
Metode pengerjaan Tugas akhir ini menggunakan metode Quaternion yang pada penelitian sebelumnya pernah
digunakan pada satelit orbit rendah. Pergerakan pesawat atau rotasi pesawat terbang saat mengalami gangguan dapat diperoleh dengan matriks rotasi R, sudut Euler, dan quaternion. Disini model dasar pergerakan pesawat akan dibentuk menggunakan metode quaternion. Kemudian pengendali akan disusun agar perilaku pesawat sesuai dengan yang diinginkan menggunakan Sliding Mode Control (SMC).
Dalam tugas akhir ini akan dibahas mengenai analisa model pergerakan pergerakan pesawat terbang berdasarkan model quaternion serta bagaimana desain pengendali perilaku pesawat terbang tersebut.
II. GERAK PESAWATTERBANG
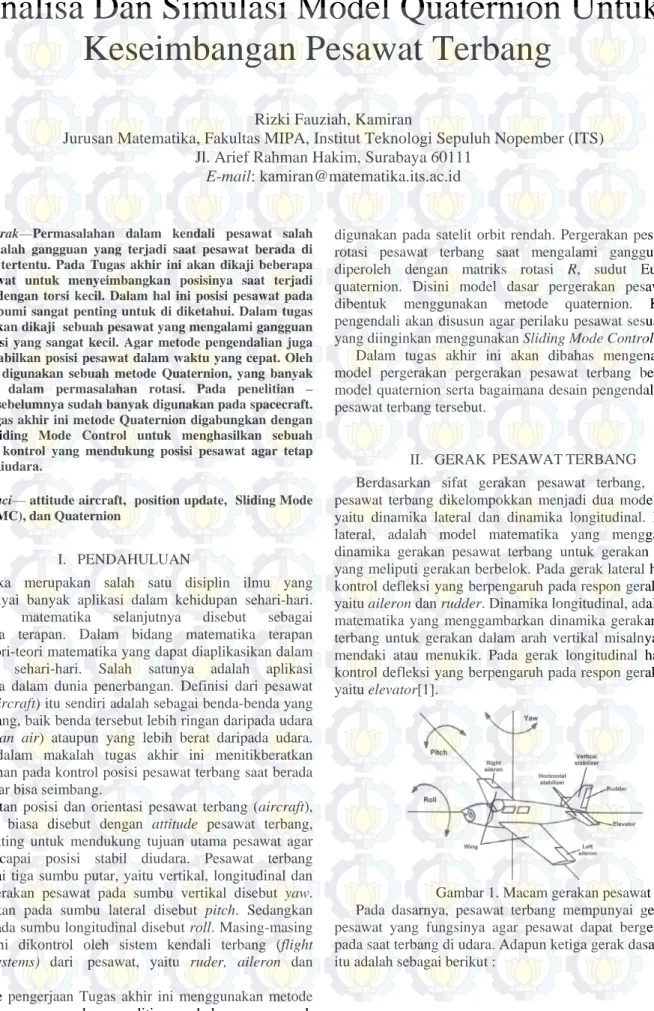
Berdasarkan sifat gerakan pesawat terbang, dinamika pesawat terbang dikelompokkan menjadi dua model dinamik yaitu dinamika lateral dan dinamika longitudinal. Dinamika lateral, adalah model matematika yang menggambarkan dinamika gerakan pesawat terbang untuk gerakan mendatar yang meliputi gerakan berbelok. Pada gerak lateral hanya dua kontrol defleksi yang berpengaruh pada respon gerak pesawat yaitu aileron dan rudder. Dinamika longitudinal, adalah model matematika yang menggambarkan dinamika gerakan pesawat terbang untuk gerakan dalam arah vertikal misalnya gerakan mendaki atau menukik. Pada gerak longitudinal hanya satu kontrol defleksi yang berpengaruh pada respon gerak pesawat yaitu elevator[1].
Gambar 1. Macam gerakan pesawat
Pada dasarnya, pesawat terbang mempunyai gerak dasar pesawat yang fungsinya agar pesawat dapat bergerak stabil pada saat terbang di udara. Adapun ketiga gerak dasar pesawat itu adalah sebagai berikut :
Analisa Dan Simulasi Model Quaternion Untuk
Keseimbangan Pesawat Terbang
Rizki Fauziah, Kamiran
Jurusan Matematika, Fakultas MIPA, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected]
2
1. Pitching
Pitching merupakan gerakan menggangguk atau gerakan
keatas dan kebawah dari nose pesawat, pitching bergerak pada sumbu lateral pesawat.
2. Rolling
Rolling merupakan gerakan berguling (roll) dari pesawat, rolling bergerak pada sumbu longitudinal pesawat.
3. Yawing
Yawing merupakan gerakan menggeleng atau nose
pesawat bergerak ke kanan dan ke kiri. III. MODELMATEMATIKA
Model matematika menunjukkan gangguan, input kontrol, spesifikasi pesawat terbang sebagai input, kecepatan linier dan kecepatan angular pada koordinat bodi pesawat sebagai outputnya. Berdasarkan penelitian sebelumnya telah diketahui persamaan gangguan total yang digunakan untuk menentukan kecepatan linier pada pesawat terbang. Berikut ini adalah model matematika pergerakan pesawat bedasarkan gerakan
Roll, Pitch, dan Yaw :
dengan :
U = Kecepatan linier sumbu x V = Kecepatan linier sumbu y W = Kecepatan linier sumbu z
P = Kecepatan sudut sumbu x
Q = Kecepatan sudut sumbu y
R = Kecepatan sudut sumbu z
X
F
= Gaya yang terjadi pada sumbu x
Y
F
= Gaya yang terjadi pada sumbu y
Z
F
= Gaya yang terjadi pada sumbu z
Dengan memisalkan input control sebagai c dan gangguan pada body axes sebagai d, maka didapat persamaan dinamika pesawat terbang sebagai berikut :
𝑗𝑗𝜔𝜔̇ = 𝜇𝜇𝑗𝑗𝜔𝜔 + 𝑐𝑐 + 𝑑𝑑 Dimana :
𝑗𝑗 = �𝑗𝑗0 𝑗𝑗1 0 02 0 0 0 𝑗𝑗3
� adalah matriks inersia Pesawat terbang
𝜔𝜔 = �𝑃𝑃𝑄𝑄 𝑅𝑅� = �
𝜔𝜔1 𝜔𝜔2 𝜔𝜔3
� adalah vector matriks kecepatan sudut 𝑐𝑐 = [𝑐𝑐1 𝑐𝑐2 𝑐𝑐3]𝑇𝑇 adalah vektor matriks input control pesawat terbang.
𝑑𝑑 = [𝑑𝑑1 𝑑𝑑2 𝑑𝑑3]𝑇𝑇 adalah gangguan eksternal pesawat. dengan memisalkan P = 𝜔𝜔1, 𝑄𝑄 = 𝜔𝜔2, dan 𝑅𝑅 = 𝜔𝜔3, maka diperoleh: 𝜇𝜇 = �−𝑅𝑅0 𝑅𝑅0 −𝑄𝑄𝑃𝑃 𝑄𝑄 −𝑃𝑃 0 � = � 0 𝜔𝜔3 −𝜔𝜔2 −𝜔𝜔3 0 𝜔𝜔1 𝜔𝜔2 −𝜔𝜔1 0 �
Model matematika pesawat terbang ini lebih menegaskan pada koordinat pesawat. Ada hubungan langsung antara sudut pergerakan Euler dan kecepatan sudut pesawat terbang disekeliling body axes. Dari hubungan ini, maka sudut pergerakannya berubah menjadi :
𝜑𝜑̇ = 𝑃𝑃 + 𝑄𝑄 sin 𝜑𝜑 tan 𝜃𝜃 + 𝑅𝑅 cos 𝜑𝜑 tan 𝜃𝜃 𝜃𝜃̇ = 𝑄𝑄 cos 𝜑𝜑 − 𝑅𝑅 sin 𝜑𝜑
𝜓𝜓̇ = 𝑄𝑄 sin 𝜑𝜑 sec 𝜃𝜃 + 𝑅𝑅 cos 𝜑𝜑 sec 𝜃𝜃
Dengan cara menginverskan persamaan (2) maka akan diperoleh :
𝜔𝜔1= 𝑃𝑃 = 𝜑𝜑̇ − 𝜓𝜓̇ sin 𝜃𝜃
𝜔𝜔2= 𝑄𝑄 = 𝜃𝜃̇ cos 𝜑𝜑 + 𝜓𝜓̇ sin 𝜑𝜑 cos 𝜃𝜃 𝜔𝜔3= 𝑅𝑅 = −𝜃𝜃̇ sin 𝜑𝜑 + 𝜓𝜓̇ cos 𝜑𝜑 cos 𝜃𝜃
Persamaan state untuk gerakan pesawat terbang pada gerakan
Roll, Pitch, dan Yaw adalah :
𝑥𝑥 = �𝜑𝜑 𝜑𝜑̇ 𝜃𝜃 𝜃𝜃̇ 𝜓𝜓 𝜓𝜓̇�𝑇𝑇 = [𝑥𝑥1 𝑥𝑥2 𝑥𝑥3 𝑥𝑥4 𝑥𝑥5 𝑥𝑥6]𝑇𝑇 Pesamaan state diperoleh dengan mendekomposisikan pergerakan pesawat menjadi tiga , yaitu Roll(𝜑𝜑), 𝑌𝑌𝑌𝑌𝑌𝑌(𝜓𝜓), dan
Pitch(𝜃𝜃), sehingga dari persamaan (2) menjadi :
�𝑗𝑗0 𝑗𝑗1 0 02 0 0 0 𝑗𝑗3 � 𝜔𝜔̇ = �𝜔𝜔𝜔𝜔21𝜔𝜔𝜔𝜔33𝑗𝑗𝑗𝑗32− 𝜔𝜔− 𝜔𝜔12𝜔𝜔𝜔𝜔33𝑗𝑗𝑗𝑗31 𝜔𝜔1𝜔𝜔2𝑗𝑗1− 𝜔𝜔1𝜔𝜔2𝑗𝑗2 � + �𝑐𝑐𝑐𝑐12 𝑐𝑐3 � + �𝑑𝑑𝑑𝑑12 𝑑𝑑3 �
IV. ANALISA DAN PEMBAHASAN
A. Pembentukan Persamaan State
Persamaan state diperlukan untuk menentukan bahwa persamaan adalah non-linier. Sehingga dari persamaan (5) pada baris pertama diperoleh penyelesaian persamaan state
Roll (𝜑𝜑) , baris kedua state Pitch(𝜃𝜃), dan baris ketiga state
𝑌𝑌𝑌𝑌𝑌𝑌(𝜓𝜓).
1. Persamaan state Roll
Gerakan rolling dilakukan pada saat pesawat akan berbelok atau bergerak ke arah kiri atau ke arah kanan.
𝑥𝑥 = [𝜑𝜑, 𝜑𝜑̇ ]𝑇𝑇 = [𝑥𝑥
1, 𝑥𝑥2]𝑇𝑇�𝑥𝑥 𝑥𝑥1̇ = 𝑥𝑥2
2̇ = 𝑓𝑓1(𝑥𝑥) + 𝑏𝑏1(𝑥𝑥)𝑢𝑢 + 𝐷𝐷1 Dari persamaan (5) untuk persamaan Roll(𝜑𝜑) : 𝑗𝑗1𝜔𝜔1̇ = 𝜔𝜔2𝜔𝜔3𝑗𝑗2− 𝜔𝜔2𝜔𝜔3𝑗𝑗3+ 𝑐𝑐1+ 𝑑𝑑1
= (𝑗𝑗2− 𝑗𝑗3)𝜔𝜔2𝜔𝜔3+ 𝑐𝑐1+ 𝑑𝑑1 𝜔𝜔1̇ = (𝑗𝑗2𝑗𝑗−𝑗𝑗13)𝜔𝜔2𝜔𝜔3+𝑐𝑐𝑗𝑗11+𝑑𝑑𝑗𝑗11 dimana 𝜔𝜔1̇ =𝑑𝑑𝜔𝜔1
𝑑𝑑𝑑𝑑 sedangkan 𝜔𝜔1= 𝑃𝑃 = 𝜑𝜑̇ − 𝜓𝜓̇ sin 𝜃𝜃, maka untuk langkah selanjutnya agar diperoleh sebuah fungsi adalah sebagai berikut : 𝑑𝑑𝜔𝜔1 𝑑𝑑𝑑𝑑 = (𝑗𝑗2−𝑗𝑗3) 𝑗𝑗1 (−𝑥𝑥4 2sin 𝑥𝑥
1cos 𝑥𝑥1+ 𝑥𝑥4𝑥𝑥6cos2𝑥𝑥1cos 𝑥𝑥3− 𝑥𝑥4𝑥𝑥6sin2𝑥𝑥1cos𝑥𝑥3+𝑥𝑥6 2sin𝑥𝑥1cos𝑥𝑥1cos2𝑥𝑥3+𝑐𝑐1𝑗𝑗1+𝑑𝑑1𝑗𝑗1 dengan mengacu pada persamaan (4) bahwa sudut-sudut
Roll(𝜑𝜑), Pitch(𝜃𝜃), dan Yaw(𝜓𝜓) akan disubstitusi dengan
statenya masing – masing.
𝑑𝑑𝜔𝜔1 𝑑𝑑𝑑𝑑 =
𝑑𝑑(𝑥𝑥2− 𝑥𝑥6sin 𝑥𝑥3) 𝑑𝑑𝑑𝑑
= 𝑥𝑥2̇ − 𝑥𝑥6̇ sin 𝑥𝑥3− 𝑥𝑥3̇ 𝑥𝑥6cos 𝑥𝑥3 dengan cara substitusi, maka diperoleh :
𝑥𝑥2̇ =(𝑗𝑗2𝑗𝑗−𝑗𝑗13)(−𝑥𝑥42sin 𝑥𝑥1cos 𝑥𝑥1+ 𝑥𝑥4𝑥𝑥6cos2𝑥𝑥1cos 𝑥𝑥3− 𝑈𝑈̇ = 𝑉𝑉𝑅𝑅 − 𝑊𝑊𝑄𝑄 − 𝑔𝑔 sin 𝜃𝜃 +𝐹𝐹𝑋𝑋 𝑚𝑚 𝑉𝑉̇ = 𝑊𝑊𝑃𝑃 − 𝑈𝑈𝑅𝑅 + 𝑔𝑔 sin 𝜑𝜑 cos 𝜃𝜃 +𝐹𝐹𝑌𝑌 𝑚𝑚 𝑊𝑊̇ = 𝑈𝑈𝑄𝑄 − 𝑉𝑉𝑃𝑃 + 𝑔𝑔 cos 𝜑𝜑 cos 𝜃𝜃 +𝐹𝐹𝑍𝑍 𝑚𝑚 (1) (3) (4) (2) (5) (6)
𝑥𝑥4𝑥𝑥6sin2𝑥𝑥1cos 𝑥𝑥3+ 𝑥𝑥62sin 𝑥𝑥1cos 𝑥𝑥1cos2𝑥𝑥3) +𝑐𝑐𝑗𝑗1 1+
𝑑𝑑1 𝑗𝑗1+
𝑥𝑥6̇ sin 𝑥𝑥3+ 𝑥𝑥3̇ 𝑥𝑥6cos 𝑥𝑥3
Dari semua langkah penyelesaian persamaan state untuk gerakan Roll (𝜑𝜑) diperoleh sebuah fungsi non-linier sebagai berikut :
𝑥𝑥2̇ = 𝑓𝑓1(𝑥𝑥) + 𝑏𝑏1(𝑥𝑥) + 𝐷𝐷1 dengan :
𝑓𝑓1(𝑥𝑥) =(𝑗𝑗2𝑗𝑗−𝑗𝑗13)(−𝑥𝑥42sin 𝑥𝑥1cos 𝑥𝑥1+ 𝑥𝑥4𝑥𝑥6cos2𝑥𝑥1cos 𝑥𝑥3− 𝑥𝑥4𝑥𝑥6sin2𝑥𝑥1cos𝑥𝑥3+𝑥𝑥6 2sin𝑥𝑥1cos𝑥𝑥1cos2𝑥𝑥3
𝑏𝑏1(𝑥𝑥) =𝑗𝑗11 Dan
𝐷𝐷1=𝑑𝑑𝑗𝑗11+ 𝑥𝑥6̇ sin 𝑥𝑥3− 𝑥𝑥3̇ 𝑥𝑥6cos 𝑥𝑥3
Pada persamaan 𝐷𝐷1 dapat dilihat adanya percepatan yang diasumsikan konstan.
2. Persamaan state Pitch
Selanjutnya adalah menyelesaikan persamaan state untuk persamaan Pitch(𝜃𝜃) pada baris kedua pada persamaan: 𝑥𝑥 = �𝜃𝜃, 𝜃𝜃̇ �𝑇𝑇= [𝑥𝑥3, 𝑥𝑥4]𝑇𝑇= �𝑥𝑥 𝑥𝑥3̇ = 𝑥𝑥4
4̇ = 𝑓𝑓2(𝑥𝑥) + 𝑏𝑏2(𝑥𝑥) + 𝐷𝐷2
Dari persamaan (5), yaitu persamaan matriks pada baris kedua, maka selanjutnya dapat digunakan sebagai langkah-langkah untuk menyelesaikan persamaan state Pitch(𝜃𝜃) : 𝑗𝑗2𝜔𝜔2̇ = 𝜔𝜔1𝜔𝜔3𝑗𝑗3− 𝜔𝜔1𝜔𝜔3𝑗𝑗1+ 𝑐𝑐2+ 𝑑𝑑2
= (𝑗𝑗3− 𝑗𝑗1)𝜔𝜔1𝜔𝜔3+ 𝑐𝑐2+ 𝑑𝑑2 𝜔𝜔2̇ = (𝑗𝑗3𝑗𝑗−𝑗𝑗21)𝜔𝜔1𝜔𝜔3+𝑐𝑐𝑗𝑗22+𝑑𝑑𝑗𝑗22
Dengan mensubstitusikan nilai 𝑃𝑃(𝜔𝜔1) dan 𝑅𝑅(𝜔𝜔3) maka : 𝜔𝜔2̇ = (𝑗𝑗3𝑗𝑗−𝑗𝑗21)(𝑥𝑥2− 𝑥𝑥6sin 𝑥𝑥3)
(−𝑥𝑥4sin 𝑥𝑥1+ 𝑥𝑥6cos 𝑥𝑥1cos 𝑥𝑥3) +𝑐𝑐𝑗𝑗2 2+
𝑑𝑑2 𝑗𝑗2 =(𝑗𝑗3−𝑗𝑗1)
𝑗𝑗2 (−𝑥𝑥4sin 𝑥𝑥1− 𝑥𝑥2𝑥𝑥6cos 𝑥𝑥1cos 𝑥𝑥3+
𝑥𝑥4𝑥𝑥6sin𝑥𝑥1sin𝑥𝑥3−𝑥𝑥6 2sin𝑥𝑥3cos𝑥𝑥1cos𝑥𝑥3+𝑐𝑐2𝑗𝑗2+𝑑𝑑2𝑗𝑗2 𝑑𝑑𝜔𝜔2
𝑑𝑑𝑑𝑑 =
𝑑𝑑�𝜃𝜃̇ cos 𝜑𝜑 + 𝜓𝜓̇ sin 𝜑𝜑 cos 𝜃𝜃� 𝑑𝑑𝑑𝑑
= 𝑥𝑥4̇ cos 𝑥𝑥1+ 𝑥𝑥1̇ 𝑥𝑥4sin 𝑥𝑥1+ 𝑥𝑥6̇ sin 𝑥𝑥1cos 𝑥𝑥3+ 𝑥𝑥1̇ 𝑥𝑥6sin 𝑥𝑥1cos 𝑥𝑥3− 𝑥𝑥3̇ 𝑥𝑥6sin 𝑥𝑥1cos 𝑥𝑥3
Karena :
𝜔𝜔2̇ =𝑑𝑑𝜔𝜔𝑑𝑑𝑑𝑑2 𝑑𝑑𝜔𝜔2
𝑑𝑑𝑑𝑑 =
(𝑗𝑗3− 𝑗𝑗1)
𝑗𝑗2 (−𝑥𝑥4sin 𝑥𝑥1− 𝑥𝑥2𝑥𝑥6cos 𝑥𝑥1cos 𝑥𝑥3 + 𝑥𝑥4𝑥𝑥6sin 𝑥𝑥1sin 𝑥𝑥3
− 𝑥𝑥62sin 𝑥𝑥3cos 𝑥𝑥1cos 𝑥𝑥3) +𝑐𝑐𝑗𝑗2 2+
𝑑𝑑2 𝑗𝑗2 𝑥𝑥4̇ cos 𝑥𝑥1+ 𝑥𝑥1̇ 𝑥𝑥4sin 𝑥𝑥1+ 𝑥𝑥6̇ sin 𝑥𝑥1cos 𝑥𝑥3+
𝑥𝑥1̇ 𝑥𝑥6sin 𝑥𝑥1cos 𝑥𝑥3− 𝑥𝑥3̇ 𝑥𝑥6sin 𝑥𝑥1cos 𝑥𝑥3=(𝑗𝑗3𝑗𝑗−𝑗𝑗21)(−𝑥𝑥4sin 𝑥𝑥1− 𝑥𝑥2𝑥𝑥6cos𝑥𝑥1cos𝑥𝑥3+𝑥𝑥4𝑥𝑥6sin𝑥𝑥1sin𝑥𝑥3−𝑥𝑥6
2sin𝑥𝑥3cos𝑥𝑥1cos𝑥𝑥3+𝑐𝑐2𝑗𝑗2+𝑑𝑑2𝑗𝑗2
𝑥𝑥4̇
=(𝑗𝑗𝑗𝑗3− 𝑗𝑗1) 2cos 𝑥𝑥1` �
−𝑥𝑥4sin 𝑥𝑥1− 𝑥𝑥2𝑥𝑥6cos 𝑥𝑥1cos 𝑥𝑥3
+𝑥𝑥4𝑥𝑥6sin 𝑥𝑥1sin 𝑥𝑥3− 𝑥𝑥62sin 𝑥𝑥3cos 𝑥𝑥1cos 𝑥𝑥3� + 𝑐𝑐2 𝑗𝑗2cos 𝑥𝑥1+ 𝑑𝑑2 𝑗𝑗2cos 𝑥𝑥1− 𝑥𝑥1̇ 𝑥𝑥4sin 𝑥𝑥1 cos 𝑥𝑥1 −sin 𝑥𝑥1cos 𝑥𝑥3 cos 𝑥𝑥1 (𝑥𝑥1̇ 𝑥𝑥6+ 𝑥𝑥6̇ − 𝑥𝑥3̇ 𝑥𝑥6)
Dari semua langkah penyelesaian persamaan state untuk gerakan Pitch (𝜑𝜑) diperoleh sebuah fungsi non-linier sebagai berikut :
𝑥𝑥4̇ = 𝑓𝑓2(𝑥𝑥) + 𝑏𝑏2(𝑥𝑥) + 𝐷𝐷2 dengan :
𝑓𝑓2(𝑥𝑥) =(𝑗𝑗𝑗𝑗3− 𝑗𝑗1)
2cos 𝑥𝑥1(−𝑥𝑥4sin 𝑥𝑥1− 𝑥𝑥2𝑥𝑥6cos 𝑥𝑥1cos 𝑥𝑥3 + 𝑥𝑥4𝑥𝑥6sin 𝑥𝑥1sin 𝑥𝑥3
− 𝑥𝑥62sin 𝑥𝑥3cos 𝑥𝑥1cos 𝑥𝑥3) 𝑏𝑏2(𝑥𝑥) =𝑗𝑗 1 2cos 𝑥𝑥1 𝐷𝐷2=𝑗𝑗 𝑑𝑑2 2cos 𝑥𝑥1− 𝑥𝑥1̇ 𝑥𝑥4sin 𝑥𝑥1 cos 𝑥𝑥1 − sin 𝑥𝑥1cos 𝑥𝑥3 cos 𝑥𝑥1 (𝑥𝑥1̇ 𝑥𝑥6+ 𝑥𝑥6̇ − 𝑥𝑥3̇ 𝑥𝑥6)
dari persamaan gangguan dapat dilihat masih terdapat nilai hal ini dikarenakan terjadi percepatan pada gerakan pesawat, namun dalam kasus ini percepatan dianggap konstan.
3. Persamaan State Yaw
Untuk persamaan state ketiga yang harus dicari dalam menyelesaikan system pemodelan pesawat adalah persamaan
State Yaw(𝜃𝜃. Langkah-langkah penyelesaiannya adalah
sebagai berikut :
𝑥𝑥 = �𝜓𝜓, 𝜓𝜓̇ �𝑇𝑇= [𝑥𝑥5, 𝑥𝑥6]𝑇𝑇 = �𝑥𝑥 𝑥𝑥5̇ = 𝑥𝑥6
6̇ = 𝑓𝑓3(𝑥𝑥) + 𝑏𝑏3(𝑥𝑥) + 𝑑𝑑3 langkah-langkah untuk menyelesaikan persamaan state
Yaw(𝜓𝜓) :
𝑗𝑗3𝜔𝜔3̇ = 𝜔𝜔1𝜔𝜔2𝑗𝑗1− 𝜔𝜔1𝜔𝜔2𝑗𝑗2+ 𝑐𝑐3+ 𝑑𝑑3 = (𝑗𝑗1− 𝑗𝑗2)𝜔𝜔1𝜔𝜔2+ 𝑐𝑐3+ 𝑑𝑑3 𝜔𝜔3̇ = (𝑗𝑗1𝑗𝑗−𝑗𝑗32)𝜔𝜔1𝜔𝜔2+𝑐𝑐𝑗𝑗33+𝑑𝑑𝑗𝑗33 𝜔𝜔3 ̇ = (𝑗𝑗1𝑗𝑗−𝑗𝑗2)
3 (𝑥𝑥2− 𝑥𝑥6sin 𝑥𝑥3)(𝑥𝑥4cos 𝑥𝑥1+ 𝑥𝑥6sin 𝑥𝑥1cos 𝑥𝑥3) + 𝑐𝑐3
𝑗𝑗3+ 𝑑𝑑3 𝑗𝑗3
= (𝑗𝑗1−𝑗𝑗2)
𝑗𝑗3 (𝑥𝑥2𝑥𝑥4cos 𝑥𝑥1+ 𝑥𝑥2𝑥𝑥6sin 𝑥𝑥1cos 𝑥𝑥3−
𝑥𝑥4𝑥𝑥6cos𝑥𝑥1sin𝑥𝑥3−𝑥𝑥6 2sin𝑥𝑥1sin𝑥𝑥3cos𝑥𝑥3+𝑐𝑐3𝑗𝑗3+𝑑𝑑3𝑗𝑗3 𝑑𝑑𝜔𝜔3
𝑑𝑑𝑑𝑑 =
𝑑𝑑(−𝑥𝑥4sin 𝑥𝑥1+ 𝑥𝑥6sin 𝑥𝑥1cos 𝑥𝑥3) 𝑑𝑑𝑑𝑑
= −𝑥𝑥̇ sin 𝑥𝑥4 1− 𝑥𝑥1̇ 𝑥𝑥4cos 𝑥𝑥1+ 𝑥𝑥6̇ sin 𝑥𝑥1cos 𝑥𝑥3+ 𝑥𝑥4̇ 𝑥𝑥6cos 𝑥𝑥1cos 𝑥𝑥3+ 𝑥𝑥3̇ 𝑥𝑥6sin 𝑥𝑥1sin 𝑥𝑥3
diketahui bahwa : 𝜔𝜔3̇ =𝑑𝑑𝜔𝜔𝑑𝑑𝑑𝑑3 karena : 𝑑𝑑𝜔𝜔3 𝑑𝑑𝑑𝑑 = (𝑗𝑗1−𝑗𝑗2)
𝑗𝑗3 (𝑥𝑥2𝑥𝑥4cos 𝑥𝑥1+ 𝑥𝑥2𝑥𝑥6sin 𝑥𝑥1cos 𝑥𝑥3−
𝑥𝑥4𝑥𝑥6cos𝑥𝑥1sin𝑥𝑥3−𝑥𝑥6 2sin𝑥𝑥1sin𝑥𝑥3cos𝑥𝑥3+𝑐𝑐3𝑗𝑗3+𝑑𝑑3𝑗𝑗3 sehingga diperoleh : (7) (8) (9) (10) (11) (12)
4
𝑥𝑥6̇ =𝑗𝑗 (𝑗𝑗1− 𝑗𝑗2)
3sin 𝑥𝑥1cos 𝑥𝑥3(𝑥𝑥2𝑥𝑥4cos 𝑥𝑥1+ 𝑥𝑥2𝑥𝑥6sin 𝑥𝑥1cos 𝑥𝑥3 − 𝑥𝑥4𝑥𝑥6cos 𝑥𝑥1sin 𝑥𝑥3
− 𝑥𝑥62sin 𝑥𝑥1sin 𝑥𝑥3cos 𝑥𝑥3)
+ 𝑐𝑐3 𝑗𝑗3sin 𝑥𝑥1cos 𝑥𝑥3+ 𝑑𝑑3 𝑗𝑗3sin 𝑥𝑥1cos 𝑥𝑥3+ 𝑥𝑥4̇ cos 𝑥𝑥3+ 𝑥𝑥1̇ 𝑥𝑥4cos 𝑥𝑥1 sin 𝑥𝑥1cos 𝑥𝑥3 −𝑥𝑥4̇ 𝑥𝑥sin 𝑥𝑥6cos 𝑥𝑥1 1 − 𝑥𝑥3̇ 𝑥𝑥6sin 𝑥𝑥3 cos 𝑥𝑥3
atau ditulis dalam sebuah bentuk persamaan sebagai berikut : 𝑥𝑥6̇ = 𝑓𝑓3(𝑥𝑥) + 𝑏𝑏3(𝑥𝑥) + 𝑑𝑑3
dimana :
𝑓𝑓3(𝑥𝑥) =𝑗𝑗3sin 𝑥𝑥(𝑗𝑗1−𝑗𝑗1cos 𝑥𝑥2) 3(𝑥𝑥2𝑥𝑥4cos 𝑥𝑥1+ 𝑥𝑥2𝑥𝑥6sin 𝑥𝑥1cos 𝑥𝑥3− 𝑥𝑥4𝑥𝑥6cos𝑥𝑥1sin𝑥𝑥3−𝑥𝑥6 2sin𝑥𝑥1sin𝑥𝑥3cos𝑥𝑥3
𝑏𝑏3(𝑥𝑥) =𝑗𝑗 1 3sin 𝑥𝑥1cos 𝑥𝑥3 dan
𝑑𝑑3=𝑗𝑗2cos 𝑥𝑥𝑑𝑑2 1+𝑥𝑥1̇ 𝑥𝑥cos 𝑥𝑥4sin 𝑥𝑥1 1+sin 𝑥𝑥cos 𝑥𝑥1cos 𝑥𝑥1 3(𝑥𝑥1̇ 𝑥𝑥6− 𝑥𝑥6̇ − 𝑥𝑥3̇ 𝑥𝑥6) Sehingga persamaan non-linier untuk model pesawat yang sedang dalam posisi seimbang adalah menjadi seperti: 𝑥𝑥(𝑛𝑛)= 𝑓𝑓(𝑥𝑥) + 𝑏𝑏(𝑥𝑥)𝑢𝑢 + 𝑑𝑑
dengan n=2, 𝑥𝑥 = [𝑥𝑥 𝑥𝑥̇]𝑇𝑇 adalah variabel state yang akan dikontrol. 𝑢𝑢 adalah input kontroler, sedangkan 𝑓𝑓(𝑥𝑥) dan 𝑏𝑏(𝑥𝑥) adalah bentuk yang tidak pasti pada persamaan non-linier. Dan 𝑑𝑑 adalah bounded disturbance.
B. Transformasi Pergerakan Pesawat
Telah dijelaskan bahwa arah kosinus diperlukan untuk transformasi antar sistem koordinat. Dengan cara mentransformasikan kecepatan linier dari koordinat badan pesawat ke koordinat bumi. Beberapa langkah transformasinya adalah sebagai berikut :
� 𝑈𝑈𝜑𝜑 𝑉𝑉𝜑𝜑 𝑊𝑊𝜑𝜑 � = �10 cos 𝜑𝜑 −sin 𝜑𝜑0 0 0 sin 𝜑𝜑 cos 𝜑𝜑� � 𝑈𝑈 𝑉𝑉 𝑊𝑊� � 𝑈𝑈𝜑𝜑𝜃𝜃 𝑉𝑉𝜑𝜑𝜃𝜃 𝑊𝑊𝜑𝜑𝜃𝜃 � = � cos 𝜃𝜃0 0 sin 𝜃𝜃1 0 − sin 𝜃𝜃 0 cos 𝜃𝜃� � 𝑈𝑈𝜑𝜑 𝑉𝑉𝜑𝜑 𝑊𝑊𝜑𝜑 � �𝑈𝑈𝑉𝑉𝑊𝑊𝑊𝑊 𝑊𝑊𝑊𝑊
� = �cos 𝜓𝜓 − sin 𝜓𝜓 0sin 𝜓𝜓 cos 𝜓𝜓 0
0 0 1� �
𝑈𝑈𝜑𝜑𝜃𝜃 𝑉𝑉𝜑𝜑𝜃𝜃 𝑊𝑊𝜑𝜑𝜃𝜃
�
Dari hasil perkalian matriks diatas didapatkan sebuah matriks : �𝑈𝑈𝑉𝑉𝑊𝑊𝑊𝑊 𝑊𝑊𝑊𝑊 � = �𝑌𝑌𝑌𝑌12 𝑏𝑏𝑏𝑏12 𝑐𝑐𝑐𝑐12 𝑌𝑌3 𝑏𝑏3 𝑐𝑐3 � �𝑈𝑈𝑉𝑉 𝑊𝑊� dengan : 𝑌𝑌1 = cos 𝜃𝜃 cos 𝜓𝜓 𝑌𝑌2 = sin 𝜓𝜓 cos 𝜃𝜃 𝑌𝑌3= − sin 𝜃𝜃
𝑏𝑏1= sin 𝜃𝜃 sin 𝜑𝜑 cos 𝜓𝜓 − cos 𝜑𝜑 sin 𝜓𝜓 𝑏𝑏2= sin 𝜃𝜃 sin 𝜑𝜑 sin 𝜓𝜓 + cos 𝜑𝜑 cos 𝜑𝜑 𝑏𝑏3= sin 𝜑𝜑 cos 𝜃𝜃
𝑐𝑐1= sin 𝜃𝜃 cos 𝜑𝜑 cos 𝜓𝜓 +sin 𝜑𝜑 sin 𝜓𝜓 𝑐𝑐2= sin 𝜃𝜃 cos 𝜑𝜑 cos 𝜓𝜓 −sin 𝜑𝜑 cos 𝜓𝜓 𝑐𝑐3= cos 𝜃𝜃 cos 𝜑𝜑
Titik posisi quaternion pertama pada koordinat pesawat dapat diubah menjadi posisi referensi dengan single
rotation 𝐷𝐷. Suatu quaternion dapat digunakan untuk merotasi
suatu vektor Euclidean. Bagian vektor dari quaternion dianggap sebagai sumbu rotasi, sedangkan bagian skalar merepresentasikan sudut rotasi. Sumbu rotasi merupakan
direction cosines pada sistem koordinat. Sudut rotasi (𝐷𝐷 2⁄ )
menyatakan bahwa rotasi dapat berlangsung searah maupun berlawanan arah jarum jam, sehingga rotasi quaternion adalah sebagai berikut. 𝑞𝑞(𝑑𝑑) = 𝑐𝑐𝑐𝑐𝑐𝑐(𝐷𝐷 2⁄ ) cos 𝐷𝐷 𝑐𝑐𝑠𝑠𝑛𝑛(𝐷𝐷 2⁄ ) cos 𝐷𝐷 𝑐𝑐𝑠𝑠𝑛𝑛(𝐷𝐷 2⁄ ) cos 𝐷𝐷 𝑐𝑐𝑠𝑠𝑛𝑛(𝐷𝐷 2⁄ ) = � 𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐⃗ 𝑐𝑐𝑠𝑠𝑛𝑛(𝐷𝐷 2(𝐷𝐷 2⁄ )⁄ )� C. Perancangan Kontroler
Untuk menyesuaikan perkalian antara vektor dan quaternion agar dapat dilakukan transformasi, suatu vektor Euclidean ditulis sebagai suatu quaternion dengan bagian skalar yang bernilai nol.
𝑣𝑣 = �0𝐯𝐯� dengan 𝐯𝐯 = [𝑣𝑣1 𝑣𝑣2 𝑣𝑣3]𝑇𝑇∈ ℝ3.
𝑞𝑞𝐯𝐯𝑞𝑞∗= (𝑞𝑞
0+ 𝐪𝐪)(0 + 𝐯𝐯)(𝑞𝑞0− 𝐪𝐪)
= (2𝑞𝑞02− 1)𝐯𝐯 + 2(𝐪𝐪. 𝐯𝐯)𝐪𝐪 + 2𝑞𝑞0(𝐪𝐪 × 𝐯𝐯) Sehingga didapat matriks 𝐰𝐰 yaitu :
�𝑌𝑌𝑌𝑌12 𝑌𝑌3 � = � 2𝑞𝑞𝟎𝟎𝟐𝟐− 1+2𝑞𝑞𝟏𝟏𝟐𝟐 2𝑞𝑞1𝑞𝑞2−2𝑞𝑞0𝑞𝑞3 2𝑞𝑞1𝑞𝑞3+ 2𝑞𝑞0𝑞𝑞2 2𝑞𝑞0𝑞𝑞2+ 2𝑞𝑞0𝑞𝑞3 2𝑞𝑞𝟎𝟎𝟐𝟐− 1 + 2𝑞𝑞𝟐𝟐𝟐𝟐 2𝑞𝑞2𝑞𝑞3−2𝑞𝑞0𝑞𝑞1 2𝑞𝑞1𝑞𝑞3−2𝑞𝑞0𝑞𝑞2 2𝑞𝑞2𝑞𝑞3+ 2𝑞𝑞0𝑞𝑞1 2𝑞𝑞𝟎𝟎𝟐𝟐− 1 + 2𝑞𝑞𝟑𝟑𝟐𝟐 � �𝑣𝑣𝑣𝑣12 𝑣𝑣3 � = �1 − 2(𝑞𝑞2 2+ 𝑞𝑞 3 2) 2(𝑞𝑞 1𝑞𝑞2+ 𝑞𝑞3𝑞𝑞0) 2(𝑞𝑞1𝑞𝑞3+ 𝑞𝑞2𝑞𝑞0) 2(𝑞𝑞2𝑞𝑞1+ 𝑞𝑞3𝑞𝑞0) 1 − 2(𝑞𝑞12+ 𝑞𝑞32) 2(𝑞𝑞2𝑞𝑞3+ 𝑞𝑞1𝑞𝑞0) 2(𝑞𝑞3𝑞𝑞1+ 𝑞𝑞2𝑞𝑞0) 2(𝑞𝑞3𝑞𝑞2+ 𝑞𝑞1𝑞𝑞0) 1 − 2(𝑞𝑞12+ 𝑞𝑞22) � �𝑣𝑣𝑣𝑣12 𝑣𝑣3 �
Sehingga didapat bahwa matriks posisi A yaitu
𝐴𝐴 = �1 − 2(𝑞𝑞2 2+ 𝑞𝑞 32) 2(𝑞𝑞1𝑞𝑞2+ 𝑞𝑞3𝑞𝑞0) 2(𝑞𝑞1𝑞𝑞3+ 𝑞𝑞2𝑞𝑞0) 2(𝑞𝑞2𝑞𝑞1+ 𝑞𝑞3𝑞𝑞0) 1 − 2(𝑞𝑞12+ 𝑞𝑞32) 2(𝑞𝑞2𝑞𝑞3+ 𝑞𝑞1𝑞𝑞0) 2(𝑞𝑞3𝑞𝑞1+ 𝑞𝑞2𝑞𝑞0) 2(𝑞𝑞3𝑞𝑞2+ 𝑞𝑞1𝑞𝑞0) 1 − 2(𝑞𝑞12+ 𝑞𝑞22) �
didefinisikan persamaan kinematik untuk mendeskripsikan geometri pergerakan pesawat terbang.
𝐴𝐴̇ = 𝐴𝐴𝜇𝜇
Komponen matriks 𝑀𝑀(𝑞𝑞) untuk membuat control law digunakan estimasi nilai 𝑀𝑀(𝑞𝑞) dan batasan error masing-masing matriks. (13) (14) (15) (17) (16) (18)
𝑀𝑀(𝑄𝑄) = �−𝑞𝑞𝑞𝑞03 𝑞𝑞𝑞𝑞30 −𝑞𝑞𝑞𝑞12 𝑞𝑞2 −𝑞𝑞1 𝑞𝑞0
�
Telah diketahui pengaturan quaternion error. Dengan mensubstitusikan persamaan kinematika maka :
𝑞𝑞𝑒𝑒̇ = 𝑞𝑞𝑑𝑑̇ (𝑑𝑑) − 𝑞𝑞̇(𝑑𝑑)
= 𝑞𝑞𝑑𝑑̇ (𝑑𝑑) −12𝑀𝑀𝜇𝜇𝜔𝜔 −12𝑀𝑀𝐽𝐽−1𝑇𝑇𝑐𝑐 (4.46) 𝑞𝑞𝑒𝑒̈ = 𝑞𝑞𝑑𝑑̈ (𝑑𝑑) − 𝑞𝑞̈(𝑑𝑑)
= 𝑞𝑞𝑑𝑑̈ (𝑑𝑑) −12𝑀𝑀𝜇𝜇𝜔𝜔̇ −12𝑀𝑀𝐽𝐽−1𝑇𝑇𝑐𝑐 (4.47) Dimana :
𝑀𝑀= komponen matriks untuk membuat control law 𝜔𝜔 = kecepatan sudut
𝑞𝑞𝑒𝑒 = quaternion error
𝑞𝑞𝑑𝑑 = quaternion referensi (yang dinginkan) 𝑇𝑇𝑐𝑐 = Torsi kontrol
𝐽𝐽−1 = momen inersia
Turunan dari fungsi switching yaitu : 𝜎𝜎̇(𝑞𝑞) = 𝑞𝑞𝑒𝑒̈ + 𝐾𝐾𝑞𝑞𝑒𝑒̇
maka selanjutnya diperoleh :
𝜎𝜎̇(𝑞𝑞) = 𝑞𝑞𝑑𝑑̈ (𝑑𝑑) −12𝑀𝑀𝜇𝜇𝜔𝜔̇ −12𝑀𝑀𝐽𝐽−1𝑇𝑇𝑐𝑐+ 𝐾𝐾(𝑞𝑞𝑑𝑑̇ (𝑑𝑑) − 1
2𝑀𝑀𝜇𝜇𝜔𝜔 − 1
2𝑀𝑀𝐽𝐽−1𝑇𝑇𝑐𝑐) (4.48)
Ekuilibrium 0 dikatakan stabil asimtotis apabila titik tersebut stabil dan terdapat 𝑟𝑟 > 0 sedemikian sehingga |𝑥𝑥(0)| ≤ 𝑟𝑟 yang mengakibatkan 𝑥𝑥(𝑑𝑑) → 0 ketika 𝑑𝑑 → ∞. 𝑉𝑉 =12𝜎𝜎𝑇𝑇𝜎𝜎
Dengan 𝑉𝑉(0) dan 𝑉𝑉 < 0 untuk 𝜎𝜎 ≠ 0. Kondisi yang memenuhi kestabilan sistem merupakan turunan pertama V terhadap waktu yaitu :
𝑉𝑉̇ = 𝜎𝜎𝑇𝑇𝜎𝜎̇ = 𝜎𝜎𝑇𝑇�𝑞𝑞
𝑑𝑑̈ (𝑑𝑑) −12 𝑀𝑀𝜇𝜇𝜔𝜔̇ −12 𝑀𝑀𝐽𝐽−1𝑇𝑇𝑐𝑐+ 𝐾𝐾(𝑞𝑞𝑑𝑑̇ (𝑑𝑑) −12 𝑀𝑀𝜇𝜇𝜔𝜔 −12 𝑀𝑀𝐽𝐽−1𝑇𝑇
𝑐𝑐)� Selanjutnya didefinisikan torsi kontrol : 𝑇𝑇𝑐𝑐= 𝑇𝑇𝑒𝑒𝑞𝑞 + 𝑐𝑐𝑠𝑠𝑔𝑔𝑛𝑛(𝜎𝜎)
Dimana 𝑇𝑇𝑒𝑒𝑞𝑞 adalah Torsi yang terjadi sebelum sistem diberikan pengontrol.
𝑇𝑇𝑒𝑒𝑞𝑞 = 2𝐽𝐽𝑀𝑀−1𝑞𝑞𝑑𝑑̈ + 𝐽𝐽𝜇𝜇𝜔𝜔̇ + 2𝑀𝑀𝐽𝐽−1𝐾𝐾𝑞𝑞𝑒𝑒̇ Sehingga :
𝑇𝑇𝑐𝑐 = 2𝐽𝐽𝑀𝑀−1𝑞𝑞𝑑𝑑̈ + 𝐽𝐽𝜇𝜇𝜔𝜔̇ + 2𝑀𝑀𝐽𝐽−1𝐾𝐾𝑞𝑞𝑒𝑒̇ + 𝑐𝑐𝑠𝑠𝑔𝑔𝑛𝑛(𝜎𝜎)
Karena terjadi chattering pada 𝑐𝑐𝑠𝑠𝑔𝑔𝑛𝑛(𝜎𝜎), hal ini dapat menyebabkan ketidakstabilan pada sistem. Maka output dari 𝑇𝑇𝑐𝑐 ditambahkan dengan boundary layer. pada permukaan sliding yang membuat smooth dinamika input kendali 𝑇𝑇𝑐𝑐 dan meyakinkan bahwa sistem berada di dalam layer. 𝑢𝑢 = 𝑢𝑢� − 𝐾𝐾 𝑐𝑐𝑔𝑔𝑛𝑛 (𝜎𝜎) dilakukan dengan mengganti fungsi sgn (𝜎𝜎) dengan sat �𝜎𝜎
Φ� dan adalah konstanta positif. Munculnya chattering merupakan salah satu kekurangan metode SMC. Sehingga nilai 𝑇𝑇𝑐𝑐 akan menjadi :
𝑇𝑇𝑐𝑐𝑠𝑠 = 𝑇𝑇𝑐𝑐𝑚𝑚𝑌𝑌𝑥𝑥𝑐𝑐𝑌𝑌𝑑𝑑(𝜎𝜎ϵ𝑠𝑠)
Dengan nilai 𝑇𝑇𝑐𝑐𝑚𝑚𝑌𝑌𝑥𝑥 harus minimal sama dengan 𝑇𝑇𝑒𝑒𝑞𝑞+ 𝑐𝑐𝑠𝑠𝑔𝑔𝑛𝑛(𝜎𝜎) atau lebih besar.
𝑇𝑇𝑐𝑐𝑚𝑚𝑌𝑌𝑥𝑥 ≥ �𝑇𝑇𝑒𝑒𝑞𝑞� + 𝑐𝑐𝑠𝑠𝑔𝑔𝑛𝑛(𝜎𝜎)
Dengan 𝜖𝜖 adalah batas maksimal dan minimal pada
boundary layer dengan nilai seperti berikut ini :
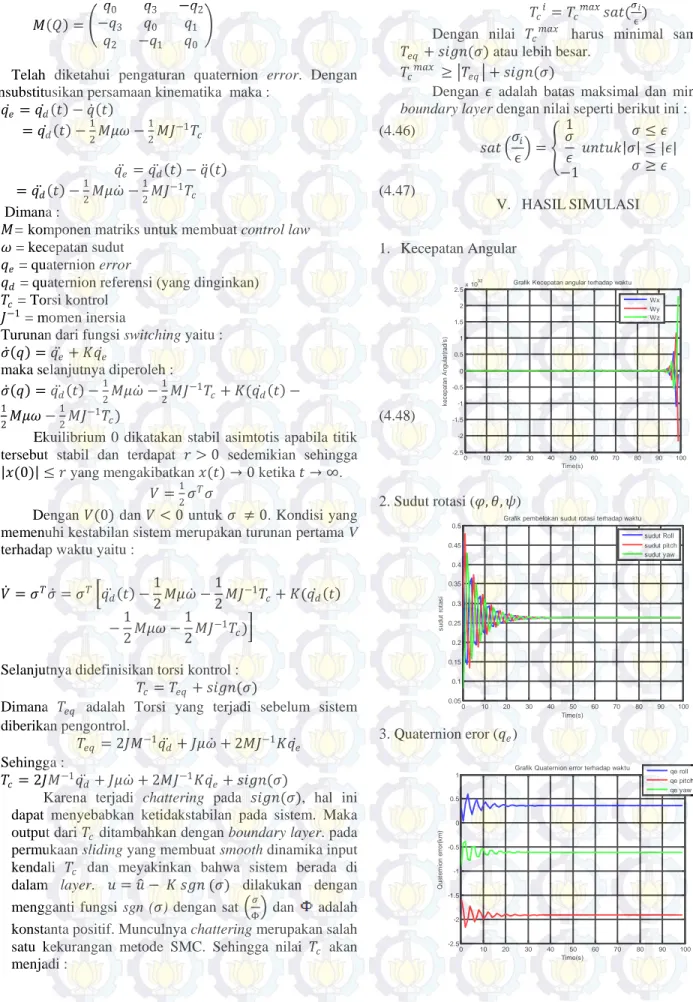
𝑐𝑐𝑌𝑌𝑑𝑑 �𝜎𝜎ϵ � = �𝑠𝑠 1 𝜎𝜎 𝜖𝜖 −1 𝑢𝑢𝑛𝑛𝑑𝑑𝑢𝑢𝑢𝑢|𝜎𝜎| ≤ |𝜖𝜖|𝜎𝜎 ≤ 𝜖𝜖 𝜎𝜎 ≥ 𝜖𝜖 V. HASILSIMULASI 1. Kecepatan Angular 2. Sudut rotasi (𝜑𝜑, 𝜃𝜃, 𝜓𝜓) 3. Quaternion eror (𝑞𝑞𝑒𝑒) 0 10 20 30 40 50 60 70 80 90 100 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5x 10 32 k ec epat an A ngul ar (r ad/ s ) Time(s) Grafik Kecepatan angular terhadap waktu
Wx Wy Wz 0 10 20 30 40 50 60 70 80 90 100 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 s udut r ot as i Time(s)
Grafik pembelokan sudut rotasi terhadap waktu sudut Roll sudut pitch sudut yaw 0 10 20 30 40 50 60 70 80 90 100 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 Q uat er ni on er ror (k m ) Time(s) Grafik Quaternion error terhadap waktu
qe roll qe pitch qe yaw
6
4. Quaternion referensi (𝑞𝑞𝑑𝑑)
5. quaternion aktual
6. Torsi kontrol (Tc)
7. Ketinggian (r)
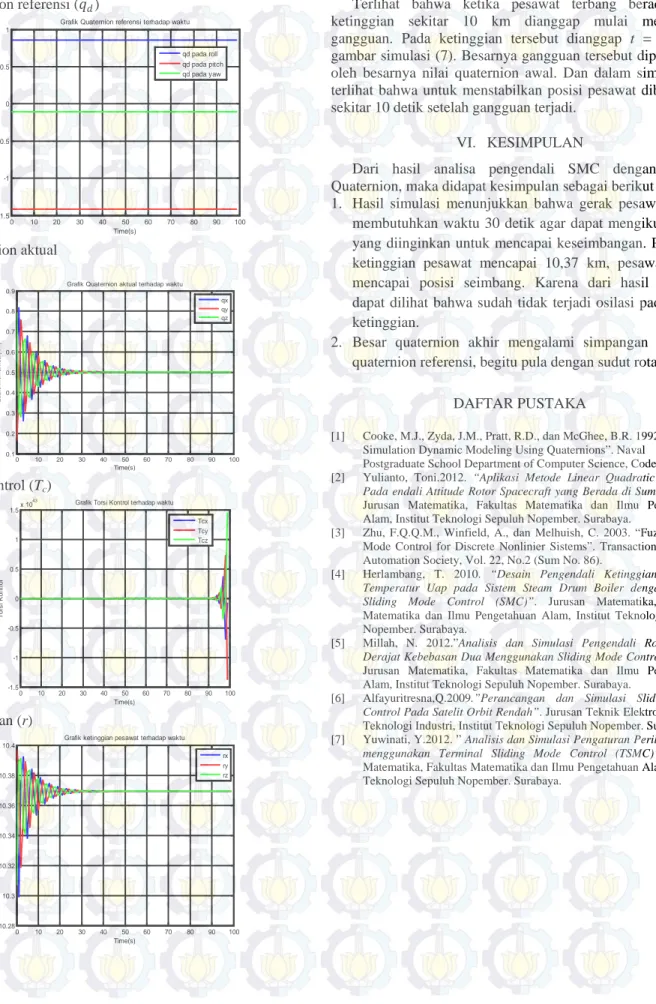
Terlihat bahwa ketika pesawat terbang berada pada ketinggian sekitar 10 km dianggap mulai mengalami gangguan. Pada ketinggian tersebut dianggap t = 0. Pada gambar simulasi (7). Besarnya gangguan tersebut dipengaruhi oleh besarnya nilai quaternion awal. Dan dalam simulasi itu terlihat bahwa untuk menstabilkan posisi pesawat dibutuhkan sekitar 10 detik setelah gangguan terjadi.
VI. KESIMPULAN
Dari hasil analisa pengendali SMC dengan Model Quaternion, maka didapat kesimpulan sebagai berikut :
1. Hasil simulasi menunjukkan bahwa gerak pesawat hanya membutuhkan waktu 30 detik agar dapat mengikuti posisi yang diinginkan untuk mencapai keseimbangan. Pada saat ketinggian pesawat mencapai 10,37 km, pesawat sudah mencapai posisi seimbang. Karena dari hasil simulasi dapat dilihat bahwa sudah tidak terjadi osilasi pada grafik ketinggian.
2. Besar quaternion akhir mengalami simpangan terhadap quaternion referensi, begitu pula dengan sudut rotasi.
DAFTAR PUSTAKA
[1] Cooke, M.J., Zyda, J.M., Pratt, R.D., dan McGhee, B.R. 1992. “Flight Simulation Dynamic Modeling Using Quaternions”. Naval
Postgraduate School Department of Computer Science, Code CS/Zk [2] Yulianto, Toni.2012. “Aplikasi Metode Linear Quadratic Regulator
Pada endali Attitude Rotor Spacecraft yang Berada di Sumbu Tetap”. Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Teknologi Sepuluh Nopember. Surabaya.
[3] Zhu, F.Q.Q.M., Winfield, A., dan Melhuish, C. 2003. “Fuzzy Sliding Mode Control for Discrete Nonlinier Sistems”. Transactions of China Automation Society, Vol. 22, No.2 (Sum No. 86).
[4] Herlambang, T. 2010. “Desain Pengendali Ketinggian Air dan Temperatur Uap pada Sistem Steam Drum Boiler dengan Metode Sliding Mode Control (SMC)”. Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Teknologi Sepuluh Nopember. Surabaya.
[5] Millah, N. 2012.”Analisis dan Simulasi Pengendali Robot Polar Derajat Kebebasan Dua Menggunakan Sliding Mode Control (SMC)”. Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Teknologi Sepuluh Nopember. Surabaya.
[6] Alfayuritresna,Q.2009.”Perancangan dan Simulasi Sliding Mode Control Pada Satelit Orbit Rendah”. Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember. Surabaya. [7] Yuwinati, Y.2012. ” Analisis dan Simulasi Pengaturan Perilaku Satelit
menggunakan Terminal Sliding Mode Control (TSMC)”. Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Teknologi Sepuluh Nopember. Surabaya.
0 10 20 30 40 50 60 70 80 90 100 -1.5 -1 -0.5 0 0.5 1 quat er ni on r ef er ens i ( k m ) Time(s)
Grafik Quaternion referensi terhadap waktu
qd pada roll qd pada pitch qd pada yaw 0 10 20 30 40 50 60 70 80 90 100 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Q uat er ni on ak tual (k m ) Time(s) Grafik Quaternion aktual terhadap waktu
qx qy qz 0 10 20 30 40 50 60 70 80 90 100 -1.5 -1 -0.5 0 0.5 1 1.5x 10 43 T or s i K ont rol Time(s) Grafik Torsi Kontrol terhadap waktu
Tcx Tcy Tcz 0 10 20 30 40 50 60 70 80 90 100 10.28 10.3 10.32 10.34 10.36 10.38 10.4 k et inggi an( k m ) Time(s) Grafik ketinggian pesawat terhadap waktu
rx ry rz