4
BAB II
DASAR TEORI
Pada bab ini akan dijelaskan dasar teori yang digunakan dalam perancangan skripsi ini. Pada sub bab 2.1 akan dijelaskan mengenai citra berwarna (RGB) dan citra beraras keabuan (grayscale), pada sub bab 2.2 akan dijelaskan mengenai resizing citra, pada sub bab 2.3 akan dijelaskan mengenai template matching, pada sub bab 2.4 akan dijelaskan mengenai rotator, dan pada sub bab 2.5 akan dijelaskan mengenai perhitungan akurasi.
2.1. Citra Berwarna (RGB) dan Citra Beraras Keabuan (Grayscale)
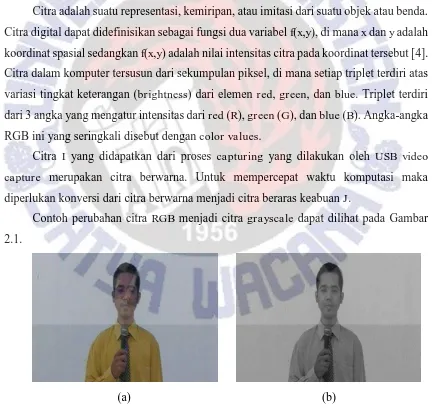
Citra adalah suatu representasi, kemiripan, atau imitasi dari suatu objek atau benda. Citra digital dapat didefinisikan sebagai fungsi dua variabel f(x,y), di mana x dan y adalah koordinat spasial sedangkan f(x,y) adalah nilai intensitas citra pada koordinat tersebut [4]. Citra dalam komputer tersusun dari sekumpulan piksel, di mana setiap triplet terdiri atas variasi tingkat keterangan (brightness) dari elemen red, green, dan blue. Triplet terdiri dari 3 angka yang mengatur intensitas dari red (R), green (G), dan blue (B). Angka-angka RGB ini yang seringkali disebut dengan color values.
Citra I yang didapatkan dari proses capturing yang dilakukan oleh USB video capture merupakan citra berwarna. Untuk mempercepat waktu komputasi maka diperlukan konversi dari citra berwarna menjadi citra beraras keabuan J.
Contoh perubahan citra RGB menjadi citra grayscale dapat dilihat pada Gambar 2.1.
(a) (b)
Gambar 2.1.(a) Citra berwarna I dan (b) Citra beraras keabuan J.
5
grayscale berbeda dengan citra hitam-putih, di mana citra hitam putih hanya terdiri atas 2 warna yaitu hitam dan putih saja.
Citra grayscale disimpan dalam format 8 bit untuk setiap sampel piksel, yang memungkinkan sebanyak 256 intensitas. Untuk mengubah citra RGB menjadi grayscale menggunakan Persamaan (2.1) [6] berikut ini:
� = . × � + . × � + . × (2.1) dimana, K= nilai grayscale
R = nilai komponen red
G = nilai komponen green
B = nilai komponen blue
2.2. Resizing Citra
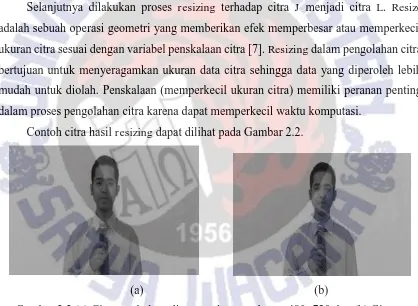
Selanjutnya dilakukan proses resizing terhadap citra J menjadi citra L. Resize adalah sebuah operasi geometri yang memberikan efek memperbesar atau memperkecil ukuran citra sesuai dengan variabel penskalaan citra [7]. Resizing dalam pengolahan citra bertujuan untuk menyeragamkan ukuran data citra sehingga data yang diperoleh lebih mudah untuk diolah. Penskalaan (memperkecil ukuran citra) memiliki peranan penting dalam proses pengolahan citra karena dapat memperkecil waktu komputasi.
Contoh citra hasil resizing dapat dilihat pada Gambar 2.2.
(a) (b)
Gambar 2.2.(a) Citra J sebelum di-resize dengan ukuran 480×720 dan (b) Citra L setelah di-resize dengan ukuran 351×527.
2.3. Template Matching
6
Nilai Threshold (α) adalah nilai ambang batas yang digunakan untuk batas kemiripan antara citra uji dan template yang dikehendaki. Nilai korelasi dapat dituliskan dalam Persamaan (2.2) [9].
= ∑ ∑ [� , −�̅].[ + , + − ̅ ]
√∑ ∑ [� , −�̅]2∑ ∑ [ + , + − ̅ ]2
(2.2) dimana, Cij = nilai normalisasi korelasi di koordinat i,j
Tu,v = template dengan ukuran u × v
�̅ = rata-rata template
Im,n = citra uji dengan ukuran m × n
�̅� = rata-rata citra yang ditutupi template
Jika nilai Ci,j≥ α maka pada posisi tersebut terdeteksi bagian yang dianggap sesuai dengan template. Dan sebaliknya jika Ci,j < α maka pada posisi tersebut tidak terdeteksi bagian apapun pada citra uji.
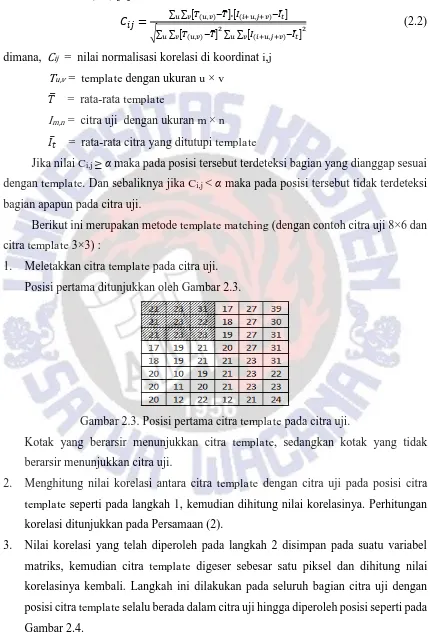
Berikut ini merupakan metode template matching (dengan contoh citra uji 8×6 dan citra template 3×3) :
1. Meletakkan citra template pada citra uji. Posisi pertama ditunjukkan oleh Gambar 2.3.
Gambar 2.3. Posisi pertama citra template pada citra uji.
Kotak yang berarsir menunjukkan citra template, sedangkan kotak yang tidak berarsir menunjukkan citra uji.
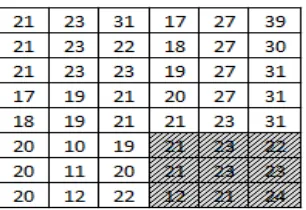
2. Menghitung nilai korelasi antara citra template dengan citra uji pada posisi citra template seperti pada langkah 1, kemudian dihitung nilai korelasinya. Perhitungan korelasi ditunjukkan pada Persamaan (2).
7
Gambar 2.4. Posisi terakhir citra template pada citra uji.
4. Dari nilai korelasi yang telah disimpan pada variabel matriks tersebut akan dicari nilai korelasi maksimal.
5. Membandingkan nilai korelasi maksimal yang didapat pada langkah 4 dengan nilai Threshold (α).
- jika nilai korelasi maksimal ≥ α maka pada posisi tersebut terdeteksi bagian yang sesuai dengan template.
- jika nilai korelasi maksimal < α maka pada posisi tersebut terdeteksi bagian yang lain yang mempunyai kemiripan dengan template.
6. Menyimpan posisi koordinat wajah dari citra uji yang telah terdeteksi ke dalam suatu variabel PW.
2.4. Rotator
Rotator merupakan perangkat keras untuk menggerakkan handycam ke kiri atau ke kanan. Rotator dikendalikan oleh rangkaian mikrokontroler. Mikrokontroler yang digunakan adalah AVR ATMega 8, perangkat ini berfungsi sebagai pengendali pergerakan motor dalam rotator. Motor akan bekerja setelah pergerakan diinformasikan dari PC ke mikrokontroler. Kemampuan rotator dalam skripsi ini dapat bergerak ke kiri atau ke kanan sesuai perintah yang diberikan dengan rentang sudut ±135º.
Rotator yang digunakan pada sistem dapat dilihat pada Gambar 2.5.
8 2.5. Perhitungan Akurasi
2.5.1. Akurasi Program Template Matching
Perhitungan akurasi program template matching ditunjukkan pada Persamaan (2.3) [10].
= # �+#� +# +#�� # �+# (2.3)
dimana, #Hit = jumlah citra wajah yang dikenali benar saat citra uji dan template berisi subyek yang sama (wajah berada dalam kotak deteksi)
#MD = Miss Detection, jumlah citra wajah yang tidak dikenali dengan benar saat citra uji dan template berisi subyek yang sama (tidak ada kotak deteksi dalam citra keluaran)
#FA = False Alarm, jumlah citra wajah dan bukan wajah yang dikenali benar saat citra uji dan template berisi subyek yang sama (wajah tidak berada dalam kotak deteksi) atau jumlah citra wajah dan bukan wajah yang dikenali benar saat citra uji dan template berisi subyek yang berbeda #CR = Correct Rejection jumlah citra wajah yang tidak dikenali dengan benar
saat citra uji dan template berisi subyek yang berbeda (tidak ada kotak deteksi dalam citra keluaran)
Contoh ilustrasi citra keluaran dari hasil penerapan template matching dapat dilihat pada Gambar 2.6.
template = template =
citra uji citra keluaran citra uji citra keluaran Citra wajah yang dikenali benar dimana wajah berada dalam kotak deteksi (Hit)
template = template =
citra uji citra keluaran citra uji citra keluaran Citra wajah yang tidak dikenali dengan benar saat citra uji dan template berisi subyek
yang sama (MD)
Gambar 2.6. Citra keluaran template matching (kotak berwarna merah merupakan kotak deteksi)
A A A A A B A B
9
Citra wajah yang dikenali benar dimana wajah tidak berada dalam kotak deteksi (FA)
template =
citra uji citra keluaran Citra bukan wajah yang dikenali benar dan terdapat kotak deteksi (FA)
template =
citra uji citra keluaran Citra wajah yang tidak dikenali dengan benar saat citra uji dan template berisi subyek
yang berbeda (CR)
template =
citra uji citra keluaran Citra bukan wajah yang tidak dikenali dengan benar (CR)
10 2.5.2. Akurasi Rotator
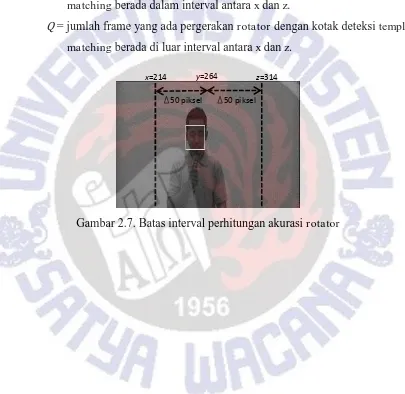
Perhitungan akurasi rotator dilakukan saat rotator bergerak. Rotator yang seharusnya tidak bergerak, tidak dimasukkan ke dalam A dan B. Batas interval (garis putus-putus) dalam perhitungan akurasi rotator dapat dilihat pada Gambar 2.7. Akurasi rotator ditunjukkan pada Persamaan (2.4).
= �
�+ (2.4)
dimana, V = jumlah frame yang ada pergerakan rotator dengan kotak deteksi template matching berada dalam interval antara x dan z.
Q = jumlah frame yang ada pergerakan rotator dengan kotak deteksi template
matching berada di luar interval antara x dan z.
Gambar 2.7. Batas interval perhitungan akurasi rotator
x=214
50 piksel
y=264 z=314