Abstract— This designed of doorstop is purposed to provide a prototype automation systems for train doorstop.This system can be one of alternative solution based on technology to reduced the high accident rate due failure of operator (human error ) to instruct open latch and close system in railways doorstop crossing.
The method used combination of infra red and photodiode as detection sensors. This system also comes with timing system in sensors with considering the characteristic of train. So, it gets an accurate detection and it can be used to distinguish between train with the other objects.
The results of testing system indicated the prototype can work well. The Latch can be close automatically when a train will pass. Otherwise, if a train is passed in other side then doorstop will open automatically. In Application, system can detected a train and distinguish with the other objects. Moreover, Based on the results of calculations in this paper is obtained safe distance for sensors installation.
Keywords—doorstop, railways,timing system, photodiode, automation systems
1.PENDAHULUAN
Permasalahan yang kerap kali muncul pada perkeretaapian saat ini adalah tingginya tingkat kecelakaan. Cukup tingginya korban jiwa dan kerugian sosial ekonomi akibat kecelakaan kereta api telah menyebabkan citra pelayanan dan majemen perkeretaapian menurun. Kinerja keselamatan semakin menjadi tuntutan dan perhatian sehingga perlu segera ditingkatkan. Penyebab tingginya kecelakaan kereta api merupakan akumulasi dari berbagai faktor, diantaranya masalah regulasi, manajemen, kondisi prasarana & sarana, SDM dan lain-lain. Selama ini, palang pintu yang dijaga oleh operator juga tidak terlepas dari timbulnya kecelakaan, apalagi jalur kereta api yang tidak mengunakan palang pintu.
Selain penggunaan dari kereta api sebagai alat transportasi, kereta api juga memiliki catatan hitam sebagai penyebab tingginya angka meninggal dunia yang disebabkan kecelakaaan pada kereta api. Berdasarkan data dari perkeretaapian Indonesia pada tahun 2004-2006, jumlah korban akibat tabrakan Kereta Api (KA) vs kendaraan umum sebanyak 91 orang (66%); korban tabrakan KA vs KA adalah 24 orang (17%); korban akibat KA anjlog adalah 2 orang (1%) dan korban kecelakaan akibat peristiwa lain-lain adalah 22 orang (16%) [1]. Sebagian besar dari berbagai penyebab kecelakaan dikarenakan tidak adanya pintu perlintasan, kegagalan menutup palang pintu pada saat yang dibutuhkan serta kegagalan operator dalam memerintahkan penutupan palang pintu ( human error ).
Oleh sebab itu perlu dikembangkan suatu teknologi yang dapat mengurangi angka kecelakaan yang disebabkan human error. Yaitu dengan adanya sistem peringatan dini dan sistem palang pintu otomatis. Diharapkan permasalahan-permasalahan dalam sistem perkeretaapian, terutama dalam segi kecelakaan dapat diminimalisir.
Penulisan makalah ini bertujuan untuk menelaah kemungkinan suatu rancangan teknologi yang tepat guna bagi masyarakat sebagai solusi pemecahan masalah akibat kekurangan fasilitas pada suatu daerah dalam memberikan sinyal peringatan dan atau diakibatkan kegagalan operator dalam memerintahkan penutupan pintu perlintasan (human error). Selain itu, pemanfaatan sinar infra-red yang dipadukan dengan sensor photodiode dapat menjadi solusi cerdas bagi optimalisasi kerja palang pintu pada sistem perkeretaapian Indonesia.
Selain itu, diharapkan sistem ini dapat memberi informasi dan pengetahuan bagi masyarakat terkait peningkatan kewaspadaan dengan adanya peringatan
DESAIN PALANG KERETA API
OTOMATIS DILENGKAPI SISTEM
PEWAKTUAN DALAM
PENDETEKSIANNYA
Fernando Dwi Agustia (1), Agus Harjoko (2) 1)
Mahasiswa Jurusan Ilmu Komputer dan Elektronika, Fakultas MIPA UGM 2)
Dosen Jurusan Ilmu Komputer dan Elektronika, Fakultas MIPA UGM
dini dari sistem peralatan yang telah dirancang sebelumnya.selain itu, gagasan ini diharapkan dapat direalisasikan oleh Pemerintah dan PT. KAI sehingga penggunaannya dapat mengurangi angka kecelakaan lalu lintas kereta api yang disebabkan kesalahan operator ( human error ).
Sebelumnya, penerapan tekhnologi palang pintu di perlintasan kereta api di Indonesia masih dilakukan secara manual, saat ini PT KAI masih menerapkan sistem komunikasi yang masih menggunakan radio HT dan sistem genta. Pada kereta api pun juga hanya terdapat sistem komunikasi radio HT dimana pihak masinis masih menginformasikan posisi kereta api kepada pihak stasiun, sehingga posisi kereta api tidak dapat diketahui secara real-time, selanjutnya penjaga pintu akan melakukan operasi untuk menutup dan membuka palang pintu pada perlintasan kereta api [2].
Penelitian mengenaitekhnologi palang pintu pernah dilakukan sebelumnya. Purwarupadengan menggunakan modul sensor infra – red( IR ) dan modul frekuensi radio ( FR ) sebagai pendeteksian kereta api [3]. Pada modul FR terdiri atas bagian pemancar ( encoder IC, HT12E, TLP-434A ) dan bagian penerima ( decoder IC HT12D, RLP-434A )[4]. Sensor IR mendeteksi adanya pergerakan kereta api, data yang dideteksi oleh sensor diteruskan ke modul FR bagian pemancar. Modul FR bagian pemancar kemudian mengirimkan data ke modul FR penerima untuk diteruskan kepada mikrokontroler. Data yang diterima diolah sedemikian rupa untuk memerintahkan motor stepper untuk membuka atau menutup palang pintu.
Metode selanjutnya yaitu dengan kombinasi sensorinfrared dan reed switch pada simulasi otomatisasi palang pintu kereta api menggunakan mikrokontroller atmega16. Modul infra red terdiri dari bagian pemancar, yang terdiri dari LED dan resistor 470 Ohm [5]. Metode pendeteksian kereta api dilakukan dengan menggunakan medan magnet sebagai pemicunya, dimana sensor infra red dipasang pada kedua sisi rel kereta api dan reed switch dipasang pada kereta api pusat, sehingga Penerapan sensor ini adalah untuk mendeteksi keberadaan magnet yang terpasang pada kereta. Sehingga sensor memberikan input masukan, yang nantinya akan memicu motor penggerak servo, untuk diturunkan sebagai pertanda kereta api akan melewati perlintasan [6].
Tekhnologi Global Positioning System (GPS) juga diimplementasikan dalam tekhnologi palang pintu otomatis ini, metode pengujian sistem dilakukan dengan membandingkan jarak kereta api yang diperoleh dari lattitude dan longitude dari kereta api dan palang pintu perlintasan. Sistem ini dilengkapi dengan teknologi GPS untuk mengetahui latitude (lintang) dan longitude (bujur) letak kereta api [7]. GPS digunakan sebagai
pesawat penerima yang bekerja berdasarkan navigasi gelombang radio dan output datanya berupa NMEA[8]. Data NMEA diparsing dengan mikrokontroler AVR ATMega 162 yang menjadi informasi untuk menunjukkan posisi kereta api dan nantinya akan dijadikan patokan untuk buka tutup palang pintu kereta api secara otomatis.
2.METODE PENELITIAN
Sistem yang akan dibuat dalam penulisan ini adalah suatu sistem yang menggunakan kombinasi modul sensor IR dan photodiode. Penggunaan modul photodiode digunakan sebagai pembacaan sensor halangan. Pada keadaan normal sensor ini akan berlogika 1 (high) dan jika ada benda yang menghalangi sinar infra red ke photodiode, maka sensor akan berlogika 0 (low) [9]. Kemudian, untuk pendeteksian yang membedakan antara kereta api dengan benda lain digunakan sistem pewaktuan. Sehingga data informasi dari sensor lebih akurat yang kemudian dikirimkan ke mikrokontroler untuk memerintahkan motor stepper membuka atau menutup palang pintu secara otomatis. Skema penempatan alat pada lintas kereta api disajikan pada Gambar 1.
Gambar 1 . Skema penempatan alat palang pintu otomatis
Sistem ini memiliki beberapa kriteria penting, antara lain :
a. Penentuan batasan kecepatan kereta api
b. Pendeteksian kereta api dengan sistem pewaktuan sehingga dapat membedakannya dengan benda lain, binatang, ataupun manusia yang melintasi rel
c. Pemasangan sensor dan rangkaian kontrol dalam melakukan operasi buka dan tutup palang pintu secara otomatis.
d. Penentuan jarak aman pemasangan sensor infra red dan photodiode
2.1 Penentuan batasan kecepatan kereta api
2.2 Pendeteksian dilengkapi dengan sistem pewaktuan
Untuk menyempurnakan sistem pendeteksian yang membedakan antara kereta api dengan benda lain, maka sistem ini dilengkapi dengan pembacaaan sensor yang mendeteksi benda setelah detik tertentu. Untuk menentukan waktu yang menjadi karakteristik utama sebuah kereta api dapat dilakukan dengan menggunakan rumus pada persamaan (1): V = Kecepatan kereta api
Sehingga dengan penerapan dari rumus tersebut didapatkan variasi data seperti yang disajikan pada tabel 1.
Tabel 1. Variasi data waktu yang dibutuhkan dalam melewati suatu titik ( point ).
Panjang kereta api
Berdasarkan perhitungan tersebut didapatkan waktu tercepat ketika melewati sebuah titik ( point ) adalah 2.7 detik dan waktu terlamanya adalah 6.02 detik. Sehingga pada pendeteksiannya dilengkapi dengan sistem delay pada pemrograman, yaitu sistem akan mendeteksi bahwa kereta api setelah melewati sensor lebih dari 2.7 detik
namun kurang dari 6.02 detik.
2.3 Pemasangan sensor dan rangkaian kontrol
Modul sensor infra red berfungsi untuk mendeteksi kereta yang akan melewati lintasan di dekat palang tersebut. Dalam hal ini sensor dipasang sedemikian rupa, dimana pemancar akan menembakkan sinar infra red ke sisi berlawanan, dan sinar tersebut akan dibaca oleh modul penerima di sisi seberang pemancar yang telah dilengkapi oleh sensor photodiode.
Alat ini dipasang di sisi kiri dan kanan palang pintu dengan ketentuan jarak antara alat dengan palang pintu.Berdasarkan beberapa perhitungan diatas, maka dapat disimpulkan bahwa minimal suatu kereta api menghalangi sinyal infra red adalah 2.7 detik. Jadi, untuk pemrograman mikrokontroler cukup diberikan delay waktu minimal sebesar 2.5 detik, dan kurang dari
6.5 detik, artinya ketika benda tersebut menghalangi sinar infra red selama lebih dari 2,5 s dan kurang dari
6.5 s, maka penerima sensor photodiode akan
mengindentifikasikan bahwa benda tersebut adalah kereta api. Jika suatu data mengandung informasi bahwa ada kereta api yang terdeteksi dari sebelah kiri palang pintu, maka mikrokontroler akan menggerakkan palang pintu ke posisi menutup.
Setelah palang pintu tertutup mikrokontroler akan menunggu sampai ada data dari sensor kanan, jika data dari sensor di sebelah kanan menunjukkan bahwa sudah tidak ada lagi kereta api yang lewat, maka mikrokontroler akan memerintahkan motor stepper untuk membuka palang pintu.
Hal ini berlaku jika kereta api datang dari
sebelah kanan palang pintu. Untuk penyempurnaan
dari metode sebelumnya adalah dengan adanya
sistem pewaktuan untuk membedakan antara kereta
api dengan benda lain.
2.4 Penentuan jarak aman pemasangan sensor infra red dan photodiode
Untuk menentukan jarak aman pemasangan sensor infra reddan photodiode maka perlu dihitung waktu yang dibutuhkan suatu kereta api dalam melintasi satu titik dengan variasi panjang dan kecepatan yang dimiliki kereta api.
Diasumsikan dengan mengambil panjang kereta api terpanjang, yakni 100 meter dan kecepatan maksimum yang digunakan sebesar 80 km/jam. kemudian, waktu yang diperlukan untuk alat mendeteksi kereta api adalah
6.5 detik (berdasarkan perhitungan di bagian gagasan yang diajukan). Waktu yang dibutuhkan agar palang pintu menutup dengan asumsi gerakan moter stepper adalah 15 detik. Kemudian, waktu yang dibutuhkan lakukan untuk meletakkan sensor tersebut, seperti yang terlihat di persamaan (2) dan (3) berikut ini
Kemudian, untuk menghindari hal-hal yang
tidak diinginkan, maka akan lebih aman jika sensor
tersebutdiletakkan pada jarak
1000 meter
dari
palang pintu perlintasan rel kereta api.
3. HASIL DAN PEMBAHASAN
Pengujian kinerja prototipe
Pengujian sensor photodiode dilakukan dengan menyambungkannya dengan sebuah LED secara seri, kemudian diberikan catudaya sebesar 5V.Saat photodiode terkena cahaya, LED menyala dan saat photodiode tidak terkena cahaya, LED padam. Berdasarkan pengujian diatas disimpulkan Photodioda bekerja dengan baik.
Pengujian modul photodiode dilakukan untuk mengetahui apakah modul tersebut dapat mengirimkan data yang diterima atau tidak. Pengujian dilakukan dengan mengukur tegangan output bagian penerima saat ada cahaya ( tidak terhalang ) dan pada saat tidak ada cahayainfra red ( terhalang ).
Hasil percobaan status sensor infra red dan photodiode ditunjukkan pada Tabel 2 sebagai berikut.
Tabel 2. Hasil percobaan status sensor dan palang Percobaan ke : Status Sensor Status Palang
1 Tidak terhalang Membuka 2 Terhalang Menutup 3 Tidak terhalang Membuka 4 Terhalang Menutup 5 Tidak terhalang Membuka Kinerja sistem secara keseluruhan diuji dengan melewatkan kereta api mainan pada sistem yang dibangun. Pengujian dilakukan dari satu arah, pengujian dilakukan sebanyak 5 kali, dan digerakkan secara manual, hasilnya dapat dilihat pada tabel 3.
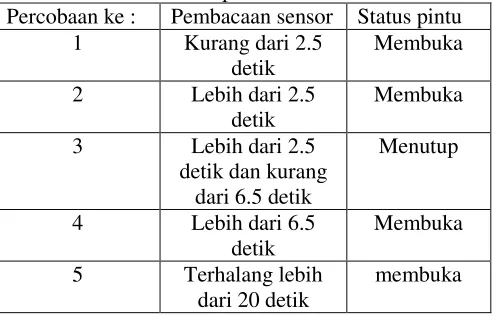
Dari tabel 3 ditunjukkan bahwa saat sensor photodiode mendeteksi adanya benda yang menghalangi sinar infra red lebih dari 2.5 detik namun kurang dari 6.5 detik maka sensor mengirimkan perintah untuk menutup palang pintu. Pada saat sensor mendeteksi pergerakan namun kurang dari 2.5 detik, sistem tidak akan berjalan sehingga palang pintu tetap dalam keadaan terbuka, hal serupa juga didapatkan ketika sensor mendeteksi pergerakan benda yang menghalangi sinar lebih dari 6.5 detik.
Tabel 4. Hasil pengujian posisi kereta api terhadap status pintu.
Percobaan ke : Pembacaan sensor Status pintu 1 Kurang dari 2.5
Tekhnologi ini memiliki penyempurnaan dalam pendeteksian dengan adanya sistem pewaktuan. Pada pengujian prototipe, miniatur palang pintu
mampu menutup sebelum kereta api melewati daerah perlintasan.
Didapatkan nilai penentuan batasan pendeteksian waktu pada sensor infra reddan photodiode yaitu minimal selama 2.5 detik dan maksimal 6.5 detik.
Didapatkan jarak pemasangan aman sensor infra red dan photodiode dari palang pintu yaitu sejauh 1000 meter.
5. SARAN
Dalam pemasangan sensor, yaitu infra red dan photodiodeharus dilakukan sejajar mungkin. Karena kombinasi sensor ini digunakan sebagai sensor halangan, jika pemasangan tidak sejajar, titik jatuh cahaya dari infra red ke photodiode tidak tepat sehingga output dari sensor tidak baik. Dengan kata lain, terjadi kesalahan (error ) dalam pembacaan logika sensor.
Sistem perlu diujicobakan secara keseluruhan pada palang pintu perlintasan kereta api di Indonesia.
Sistem ini masih bisa dikembangkan dengan menambahkan fitur peringatan dini apabila terjadi error oleh pembacaan sensor akibat hal yang tidak terduga dan pemasangan kamera serta fasilitas lainnya yang lebih lengkap.
Sistem ini belum dilengkapi dengan tindakan otomatis apabila terjadi gangguan berupa terhalangnya sensor akibat benda asing dalam waktu lama.
UCAPAN TERIMA KASIH
Penulisan makalah ini dapat terwujud berkat bimbingan yang diberikan Bapak Agus Harjoko selaku dosen pembimbing dan masukan yang diberikan teman teman ELINS. Untuk itu saya ucapkan terimakasih atas dukungannya.
DAFTARPUSTAKA
[1]Iridiastadi, H. 2013. Kajian Kecelakaan Kereta Api Dengan Memanfaatkan Human Factors Analysis And Classification System, Tesis, Program Pasca Sarjana Tekhnologi Industri, Institut Tekhnologi Bandung, Bandung.
[3] Ignatius., dkk. 2008. Prototipe Pintu Lintasan Rel Kereta Api Otomatis. Jurnal. Universitas Katholik Widya Mandala. Surabaya.
[4] LAIPAC, TLP 434A and RLP434A Datasheet,
Http://www.laipac.com/, Canada 2004. Diakses pada
tanggal 1 juni 2014.
[5] EVERLIGHT, 5.0mm Infrared LED IR333/H0/L10, Copyright © 2010, Everlight All Rights Reserved. Release Date : MAY.22.2013.
[6] Ibrahim, Irfan Al-ghazali. 2010. Pemanfaatan Infrared Dan Reed Switch Pada Simulasi Otomatisasi Palang Pintu Kereta Api Menggunakan Mikrokontroler Atmega16. Skripsi. ST AMIKOM. Yogyakarta
[7] Nasir, Ir. A., dkk. 2011. Rancang Bangun Sistem Buka Tutup Palang Pintu Kereta Api Secara Otomatis Berbasis Global Positioning System (GPS) Dan Wireless Rf Module. Skripsi. Politeknik Elektronika Negeri Surabaya. Surabaya.
[8] Theiss,A. ,David C. Yen, Cheng-Yuan Ku. 2005. Global Positioning Systems: an analysis ofapplications, current development and futureimplementations. Proceeding of Computer Standards & Interfaces 27 hal 89 – 100.