56
SISTEM PENGAMAN BARANG DI RUANG KANTOR MENGGUNAKAN
SENSOR ULTRASONIK MELALUI TELEPON PANGGILAN KELUAR
M.ROIHAN ST, MT1) , Tri Alfandi Purba2)
Program Studi Teknik Telekomunikasi Jurusan Teknik Telekomunikasi
Akademi Telkom Jakarta
[email protected]) , [email protected]2)
ABSTRAK
Sistem Pengaman barang diruang kantor ini terinspirasi dari bagaimana cara untuk meningkatkan keamanan di meja kantor agar terhindar dari pencurian barang barang berhargayang kita punya. Seiring dengan perkembangan zaman dan teknologi, pemenuhan kebutuhan manusia juga turut berkembang sehingga banyak memberikan solusi kemajuan teknologi tentang system yang bisa mengatur dan menginput program kedalam setiap system termasuk pengaman barang di ruang kantor menggunakan sensor ultrasonik.
Proses kerja dari sensor adalah dimana arduino yang terhubung dengan sensor akan mengaktifkan sensor dengan mengirimkan trigger dalam bentuk pulsa pada sensor maka sensor jarak akan memancarkan gelombang sensor ultrasonik dengan kisaran frekuensi 20Khz hingga 20Mhz. Proses tersebut akan berlangsung secara terus menerus hingga mendapatkan objek pantuldari pancaran gelombang sensor ultrasonik yang dihasilokan oleh sensor ultrasonik. Hasil input pengukuran jarak akan dibandingkan oleh arduinodengan ketentuan batas minimum jarak benda dengan sensor, namun jika jarak melewati batas jarak yang ditentukan maka otomatis akan menyalakan indikator. Dima arduino juga akan terhubung ke portD2 mikrokontroler atau interupsi eksternal (INT0) yang mana fungsi dari interupsi tersebut adalah untuk memberikan logika 0 atau perubahan logika pada interupsi. dan akan diperiksa apakah variabel bertanda 1/0, jika tanda 1 Maka AVR tidak akan menyalakan buzzer, misscall, dan send sms. Begitu juga dengan sebaliknya.
Hasil akhir perancangan system ini adalah sebuah system yang dapat mendeteksi keberadaan barang dengan sensor yang otomatis bekerja ketika barang tidak lagi berada di meja kerja sehingga akan menyebabkan bunyi buzzer, miscall dan send sms dan diikuti juga dengan perintah masukkan password untuk keamanan lebih. Secara keseluruhan system ini dapat bekerja dengan baik.
Kata Kunci : system pengaman barang diruang kantor menggunakan sensor ultrasonik, ATMEGA 16, Arduino Uno, lcd, buzzer, modem
ABSTRACK
Security Systems in the office room is inspired from how to improve security in the office desk to avoid the theft of valuable goods that we have . Along with the times and technology , human needs also evolve so many advances in technology to provide solutions on systems that can regulate and program input into any system including security of goods in the office space using ultrasonic sensors.
The process of working sensors is where arduino that is connected with sensors will activate in censorship by sending trigger in the form of pulse to the censorship of the distance and sensors will emit waves ultrasonic sensor with a range of frequencies 20khz until 20mhz .The process will take place is available continuously up to get the object of the emission of reflected waves ultrasonic sensor produced by ultrasonic sensor .The results of the input measurement of distance will be compared by arduino with the provisions of the minimum limits the distance of objects with sensors , but if the distance passed over a limit the distance that determined then automatically will kindle indicators .Where arduino would also be connected to portd2 mikrokontroler or interruptions external ( int0 which of a function of the interruption is to come up with logic 0 or change logic in interruption . And will be examined is whether variable marked 1 / 0, if 1 then avr not will kindle buzzer , misscall , and text messages .So would the on the other hand
The final result of this system design is a system that can detect the presence of goods with an automatic sensor that works when the goods are no longer on the table so that the work will cause the buzzer sounds , miscall and send sms and enter the command followed by the password for more security . Overall this system can work well .
Jurnal ICT Penelitian dan Penerapan Teknologi
1. PENDAHULUAN
Seiring dengan perkembangan zaman dan teknologi, pemenuhan kebutuhan manusia juga turut berkembang. Misalnya zaman dahulu saat bekerja seorang karyawan kantor hanya memerlukan buku dan alat tulis sederhana dalam menyelesaikan segala pekerjaan. Sekarang zaman telah berubah, tidak cukup dengan buku dan pena saja dalam menyelesaikan tugasnya akan tetapi mereka juga membutuhkan laptop, ebook reader ,tablet PC, handpone dan lain sebagainya.
Dalam pengaplikasiannya semua barang tersebut hanya diletakan di atas meja kerja saja bahkan berantakan saat tidak digunakan. Dengan meningkatnya kejahatan yang terjadi saat ini, maka kondisi tersebut akan menjadi sangat fatal. Misalnya pada saat ada keperluan mendadak untuk meninggalkan meja kerja, baik itu ke belakang, terburu buru atau dipanggil atasan dalam keadaan mendadak maka barang-barang yang ditinggalkan tersebut akan rentan sekali dicuri mengingat ukuran barang yang kecil dan mudah dibawa. Berangkat dari pemikiran tersebut, penulis mengambil judul
“SISTEM PENGAMAN BARANG DI RUANG
KANTOR MENGGUNAKAN SENSOR ULTRASONIK MELALUI TELEPON PANGGILAN KELUAR” di mana alat ini berfungsi sebagai pengaman barang dari bahaya pencurian menggunakan sensor ultrasonik dan password untuk meningkatkan keamanan lebih lanjut.
BAB 2
LANDASAN TEORI
2.1 MIKROKONTROLER
Mikrokontroler adalah sebuah sistem komputer lengkap dalam satu chip. Mikrokontroler lebih dari sekedar sebuah mikroprosesor karena sudah terdapat atau berisikan ROM (Read-Only Memory), RAM (Read-Write Memory), beberapa port masukan maupun keluaran, dan beberapa peripheral seperti pencacah/pewaktu, ADC (Analog to Digital converter), DAC (Digital to Analog converter) dan serial komunikasi. Salah satu mikrokontroler yang banyak digunakan saat ini yaitu mikrokontroler AVR. AVR adalah mikrokontroler RISC (Reduce Instuction Set Compute) 8 bit berdasarkan arsitektur Harvard. Secara umum mikrokontroler AVR dapat dapat dikelompokkan menjadi 3 kelompok, yaitu keluarga AT90Sxx, ATMega dan ATtiny. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fiturnya Seperti mikroprosesor pada umumnya, secara internal
mikrokontroler ATMega16 terdiri atas unit-unit fungsionalnya Arithmetic and Logical Unit (ALU), himpunan register kerja, register dan dekoder instruksi, dan pewaktu serta komponen kendali lainnya. Berbeda dengan mikroprosesor, mikrokontroler menyediakan memori dalam chip yang sama dengen prosesornya.
2.1.1 MIKROKONTROLER ATMEGA16
a. Fitur ATMEGA16
1. Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16Mhz. 2. Memiliki kapasitas Flash memori 16Kbyte,
EEPROM 512 Byte, dan SRAM 1Kbyte 3. Saluran I/O 32 buah, yaitu Port A, Port B,
Port C, dan Port D.
4. CPU yang terdiri dari 32 buah register. 5. User interupsi internal dan eksternal
6. Port antarmuka SPI dan Port USART sebagai komunikasi serial
7. Fitur Peripheral
b. Konfigurasi Pin ATMEGA16
Gambar 2.1 adalah Pin ATMEGA 16
Konfigurasi Pin ATMEGA16 dapat dijelaskan secara fungsional sebagai berikut:
1) VCC merupakan pin berfungsi sebagai pin masukan tegangan.
2) GND merupakan pin ground.
3) PortA (PA0..PA7) merupakan pin Input/output dua arah dan pin masukan ADC.
4) PortB (PB0..PB7) merupakan pin Input/output dua arah dan pin Timer/Counter, komparator analog, dan SPI. 5) PortC (PC0..PC7) merupakan pin Input/output dua arah dan pin TWI, komparator analog, dan Timer Oscilator. 6) PortD (PD0..PD7) merupakan pin
Input/output dua arah dan pin comparator analog, interupsi eksternal, dan komunikasi serial.
7) RESET merupakan pin berfungsi untuk me-reset mikrokontroler.
58
9) AVCC merupakan pin tegangan ADC. 10) AREF merupakan pin ADC. 2.1.2 SENSOR ULTRASONIK
Sensor ultrasonik ini bekerja dengan cara menghasilkan gelombang suara pada frekuensi tinggi, yang kemudian dipancarkan oleh bagian transmitter. Pantulan gelombang suara yang mengenai benda di depannya akan ditangkap oleh bagian receiver. Dengan mengetahui lamanya waktu antara dipancarkannya gelombang suara sampai ditangkap kembali, kita dapat menghitung jarak benda yang ada di depan modul tersebut. Kita mengetahui kecepatan suara adalah 340m/detik. Lamanya waktu tempuh gelombang suara dikalikan kecepatan suara, kemudian dibagi 2 akan menghasilkan jarak antara ultrasonic modul dengan benda didepannya.
Gelombang ultrasonik didefinisikan sebagai gelombang bunyi yang memiliki frekuensi di atas batas pendengaran manusia, yaitu lebih dari 20.000 Hz. Gambar 2.2 adalah bentuk fisik dari sensor ultrasonik.
Gambar 2.2 Bentuk Fisik Sensor Ultrasonik
Sensor ultrasonic HC-Sr04 memiliki 4 pin, yaitu: 1) Pin VCC
2) Pin TRIG 3) Pin Echo 4) Pin Ground
VCC dihubungkan dengan 5V dari Arduino dan GND dengan GND pada Arduino. TRIG terhubung pada pin digital 12 dan ECHO dihubungkan dengan pin digital 13. Untuk lebih jelasnya dapat dilihat pada gambar 2.3.
Gambar 2.3 HC-SR04 terhubung dengan Arduino
Hubungkan board Arduino anda dengan komputer menggunakan kabel USB dan upload program yang telah dibuat. Kalau tidak ada pesan error maka modul ultrasonic akan langsung bekerja mengukur jarak benda di depannya. Gunakan Serial
Monitor (Ctrl+Shift+M) pada software Arduino untuk melihat hasil pengukuran.
2.1.3 LCD 16x2
LCD adalah perangkat elektronika yang berfungsi untuk menampilkan teks, nilai hasil sensor atau menu pada output aplikasi mikrokontroler. LCD memiliki beberapa bagian yaitu:
a. Display Data Random Access Memory (DDRAM) merupakan memori tempat karakter yang ditampilkan berada.
b. Character Generator Random Access Memory (CGRAM)
CGRAM merupakan memori untuk menampilkan pola sebuah karakter. Karakter dapat berubah sesuai keinginan akan tetapi memori akan hilang pada saat catu daya tidak aktif.
2.1.4 KEYPAD
Keypad diperlukan untuk berinteraksi dengan sistem. Sebenarnya setiap pemrogram memiliki cara yang berbeda untuk berinteraksi dengan sistem. Konstruksi Keypad Seperti pada gambar 2.4
Gambar 2.4 Konstruksi Keypad 4 x 4
Bahkan untuk keypad pun secara hardwere tiap pemrogram bisa berbeda. Hal ini lebih dikarenakan kebutuhan yang berbeda. Keypad 4x4 paling sering digunakan oleh pemrogram. Pada dasarnya keypad 4x4 adalah 16 push-button yang dirangkai secara matriks dengan susunan empat baris dan empat kolom.
2.1.5 BUZZER
Jurnal ICT Penelitian dan Penerapan Teknologi
Gambar 2.5 Bentuk Fisik Buzzer
2.1.6 Modem Fastrack M1306B
Modem Fastrack M1306B adalah modul komunikasi seluler GSM yang menggunakan prinsip Plug and Play sehingga tidak memerlukan instalisasi yang rumit untuk dapat menggunakannya. Wavecom Fastrack M1306B menyediakan komunikasi data dengan perangkat luar melalui antarmuka serial serta yang dapat diprogram dengan menggunakan perintah-perintah AT Command Bentuk fisik Wavecom Fastrack M1306B ditunjukkan dalam Gambar 2.6
Gambar 2.6 Modem Fastrack M1306B
a. AT-Command untuk Calling dan SMS
AT-Command adalah perintah yang dapat diberikan kepada handphone atau GSM/CDMA modem untuk melakukan sesuatu hal, termasuk untuk mengirim dan menerima SMS. Komputer ataupun mikrokontroler dapat memberikan perintah AT-Command melalui hubungan kabel data serial ataupun bluetooth.
Untuk perintah panggilan “ATD no tujuan” dan Untuk perintah send sms “AT+CMGS no tujuan;”
2.3 PERANGKAT LUNAK
2.3.1 BAHASA PEMROGRAMAN
a. Penulisan Program Bahasa BASIC
Program Bahasa BASIC bisa dimulai dari kolom manapun karena tidak mengenal aturan penulisan di kolom tertentu. Aturan penulisan hanya dilakukan untuk keperluan dokumentasi sehingga mudah dibaca.
2.3.2 PEMROGRAMAN MIKROKONTROLER
a. Compiler
Untuk dapat dimasukkan ke dalam mikrokontroler perangkat lunak yang telah dirancang dikompilasi dari file berekstensi .bas ke file berekstensi .hex. proses kompilasi ini dilakukan dengan menggunakan software BASCOM-AVR. Adapun langkah-langkah untuk melakukan kompilasi dapat dilakukan dengan cara sebagaimana tercantum di lampiran
b. Simulasi
Setelah file berekstensi .hex perangkat lunak diuji coba terlebih dagulu apakah sudah sesuai dengan perencanaan atau belum. Proses simulasi dilakukan dengan menggunakan software PROTEUS.
c. Downloader
Untuk mengisikan perangkat lunak dari computer ke mikrokontroler dapat dilakukan dengan menggunakan software PONYPROG2000. adapun langkah-langkah untuk melakukan
pengisian peangkat lunak dari komputer ke
mikrokontroler dilakukan dengan cara sebagaimana tercantum di lampiran.
BAB III
PERANCANGAN DAN PEMBUATAN ALAT
Pada bab ini akan membahas mengenai prinsip dasar kerja sistem, serta perencanaan dan pembuatan sistem baik perangkat keras (hardware) maupun perangkat lunak (software) yang mendukung dalam pembuatan sistem pengaman barang di ruang kantor menggunakan sensor ultrasonik melalui telepon panggilan keluar. 3.1 PRINSIP KERJA SISTEM
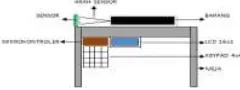
Prinsip kerja perangkat yang dirancang adalah menempatkan sensor ultrasonik di meja tempat barang yang diamankan berada. Dengan memanfaatkan prinsip kerja sensor ultrasonik yaitu pin output sensor ultrasonik akan mengeluarkan tegangan sebesar 5V atau berlogika 1 jika receiver sensor ultrasonik menerima gelombang bunyi dari transmitter sensor ultrasonik, maka alat ini menggunakan barang yang berada di atas meja sebagai bidang pantul. Sehingga gelombang bunyi yang berasal dari transmitter sensor ultrasonik dapat memantul ke receiver sensor ultrasonic, Posisi sensor pada perngkat seperti pada gambar 3.1.
Gambar 3.1 Posisi Sensor pada Perangkat
60
Gambar 3.2 Prinsip Sensor Ultrasonik
3.2 PERANCANGAN PERANGKAT KERAS
Perancangan perangkat keras terdiri dari beberapa bagian diantaranya blok catu daya, blok perangkat sensor ultrasonik, blok perangkat input, blok mikrokontroler, dan blok output.
3.2.1 Catu Daya
Rangkaian Adaptor adalah rangkaian yang berfungsi untuk mengubah arus AC menjadi arus DC. Kelebihan dari rangkaian ini adalah arus yang dihasilkan cukup stabil dan besarnya tegangan yang dihasilkan bisa kita atur dengan cara menyesuaikan komponen yang digunakan dengan output tegangan yang kita kehendaki.Sebenarnya rangkaian adaptor memiliki bermacam variasi, namun umunya kurang stabil dan ada pula yang stabil seperti catu daya yang variabel. Seperti halnya pesawat elektronika pada umumnya, maka rangkaian adaptor ini juga merupakan suatu rangkaian elektronika yang terdiri dari beberapa blok dan bagian yang mempunyai peran dan fungsi yang berbeda-beda. Gambar 3.3 adalah rangkaian adaptor.
Gambar 3.3 adalah rangkaian adaptor
3.2.2 Perangkat Sensor Ultrasonik Terhubung ke Arduino
Rangkaian ini berguna sebagai penghubung sensor ke mikrokontroler. Pada saat recveiver sensor ultrasonik tidak menerima gelombang suara dari transmitter sensor ultrasonik maka pin output sensor ultrasonik akan mengeluarkan tegangan antara 3-5 Volt.
3.2.3 Perangkat Input
Pada perangkat ini input ke mikrokontroler menggunakan keypad 4x4. Rangkaian tersebut bekerja dengan sistem scanning yaitu dengan bantuan program yang dimasukan ke dalam mikrokontroler keypad akan bekerja apabila salah satu PortB.4-7 sebagai alamat baris keypad dihubungkan dengan salah satu PortB.0-3 sebagai
alamat kolom yang kemudian diproses lebih lanjut oleh program yang berada di dalam mirokontroler. 3.2.4 Mikrokontroler
Sistem minimum AVR sangat sederhana di mana hanya menghubungkan VCC dan AVCC ke +5 Volt, GND dan AGND ke ground tanpa memamakai kristal dan pin reset diambangkan chip sudah siap bekerja normal
Rangkaian reset berfungsi untuk me-reset Mikrokontroler. Mikrokontroler akan reset jika tegangan catu nol atau pin RST dipaksa nol. 3.2.5 Perangkat Output
Perangkat ouput dalam perancangan perangkat ini terdapat 2 rangkaian, yaitu:
a. Rangkaian mikrokontroler ke LCD 16x2. b. Rangkaian mikrokontroler ke buzzer.
LCD ini berfungsi untuk menampilkan data yang berasal dari mikrokontroler. Sistem minimum dari LCD ini dapat bekerja dengan konfigurasi pin 1 dihubungkan ke ground, pin 2 ke VCC dan pin 3 dihubungkan dengan resistor variable untuk mengatur kontras dari LCD.
Pin 15 ke VCC dan pin 16 ke ground sebagai backlight sesuai datasheet. Kemudian untuk konfigurasi pin yang lain dapat dikonfigurasikan dengan mikrokontroler sesuai program yang telah dimasukan kedalam mikrokontroler.
Rangkaian buzzer ini bekerja pada saat barang dalam bahaya atau berpindah posisi maka mikrokontroler diprogram untuk mengaktifkan relay sehingga saklar relay bergeser dan menyalakan Buzzer.
3.2.6 Rangkaian Perangkat Keras Secara Keseluruhan
Dengan menggabungkan semua blok-blok rangkaian akan diperoleh rangkaian secara keseluruhan seperti pada gambar 3.4 :
Gambar 3.4 Rangkaian secara keseluruhan
Jurnal ICT Penelitian dan Penerapan Teknologi
3.3 PERANCANGAN PERANGKAT LUNAK
Untuk mengoperasikan alat yang telah dibuat dibutuhkan program dengan bahasa basic yang telah di-compile menjadi data hexa oleh software Bascom-AVR yang kemudian diisikan pada mikrokontroler ATMEGA 16 dengan software PonyProg2000 melalui port parallel komputer. Berikut ini adalah algoritma pemrograman perancangan sistem pengaman barang diruang kantor dengan menggunakan sensor ultrasonik. Diagram alir perangkat lunak seperti pada gambar 3.5
Gambar 3.5 Diagram Alir Perangkat Lunak
3.3.1 Input Tombol On
Pada tahap ini input sistem berupa penekanan tombol yang dilanjutkan dengan proses apabila tombol on ditekan maka sistem akan berjalan dan sebaliknya apabila tombol on tidak ditekan maka sistem dalam keadan off.
3.3.2 Input Posisi Barang
Pada program sebelumnya yaitu input on off, pada saat on ditekan maka program akan berlanjut kebagian ini. Pada tahap ini input sistem berupa posisi barang yang dilanjutkan dengan proses apabila barang tidak berpindah posisi maka buzzer tidak berbunyi, handphone tidak miscall dan sebaliknya apabila berpindah posisi maka buzzer akan mengeluarkan bunyi, handphone akan melakukan miscall dan LCD akan menampilkan
tulisan “CALLING” selanjutnya perintah untuk
memasukan password.
3.3.3 Input password
Pada tahap sebelumnya apabila barang berpindah posisi maka LCD akan memerintahkan untuk memasukan password. Pada bagian ini inputan berupa masukan password. Dengan proses apabila password yang dimasukan benar maka buzzer akan berhenti berbunyi, handphone tidak miscall dan LCD akan menampilkan tulisan
“Password Benar” apabila salah maka buzzer akan
tetap berbunyi dan LCD akan menampilkan perintah untuk memasukan password ulang.
BAB IV
PENGUJIAN DAN PEMBAHASAN HASIL
Pada bab IV ini akan dibahas tentang pengujian alat berdasarkan perencanaan dari perancangan sistem yang telah dibuat. Pengujian dan pembahasan yang dilakukan meliputi pengujian dan pengukuran terhadap perangkat. Pengujian yang dilakukan pada bab ini antara lain:
• Pengujian Perangkat
• Pengujian sistem secara keseluruhan 4.1 PENGUJIAN PERANGKAT
4.1.1 Pengujian Catu Daya
Pada rancangan alat digunakan rangkaian penyearah gelombang penuh menggunakan transformator CT (Center Tap) dengan tegangan output yang diinginkan adalah +5 V DC. 1. Catu Daya Arduino
Gambar 4.1 adalah ac/dc adapter atau catu daya arduino dan hasil pengukuran output catu daya.
Gambar 4.1 Catu Daya Arduino dan Hasil Pengukuran
Output Catu Daya
Tabel 4.1 Pengukuran output catu daya arduino
N o
Ketera ngan
Hasil Perhitungan
(a)
Hasil Penguk
uran (b)
Persentasi Kesalahan
€=(E1-E2)/E1 x 100%
1 Catu
daya arduino
+ 12Volt 12.32V
olt
62
Dengan Data diatas diperoleh data pengukuran dan persentasi error pada tegangan keluaran tanpa beban, besar tegangan output 12Volt,dengan hasil pengukuran 12.32 Volt, dan persentasi error rata-rata sebesar 2.66%. Tegangan tersebut digunakan untuk mencatu perancangan alat pada arduino. 2. Catu Daya Atmega 16
Gambar 4.2 adalah ac/dc adapter atau catu daya Atmega 16 dan hasil pengukuran output catu daya.
Gambar 4.2 Catu Daya Atmega 16 dan Hasil Pengukuran Output Catu Daya
Tabel 4.2 Pengukuran output catu daya Atmega16
Dengan Data diatas diperoleh data pengukuran dan persentasi error pada tegangan keluaran tanpa beban, besar tegangan output 5 Volt,dengan hasil pengukuran 5.32 Volt, dan persentasi error rata-rata sebesar 6.4%. Tegangan tersebut digunakan untuk mencatu perancangan alat pada Atmega 16.
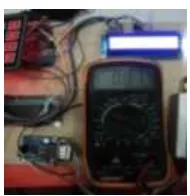
3. Catu daya Modem Wavecom
Gambar 4.3 adalah ac/dc adapter atau catu daya Atmega 16 dan hasil pengukuran output catu daya.
Gambar 4.3 Catu Daya Wavecom dan Hasil Pengukuran Output Catu Daya
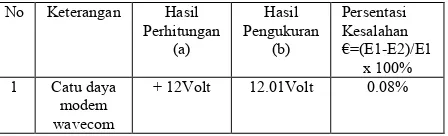
Tabel 4.3 Pengukuran output catu daya modem
No Keterangan Hasil
Perhitungan (a)
Hasil Pengukuran
(b)
Persentasi Kesalahan
€=(E1-E2)/E1 x 100%
1 Catu daya
modem wavecom
+ 12Volt 12.01Volt 0.08%
Dengan Data diatas diperoleh data pengukuran dan persentasi error pada tegangan keluaran tanpa beban, besar tegangan output 12Volt,dengan hasil pengukuran 12.01 Volt, dan persentasi error rata-rata sebesar 0.08%. Tegangan tersebut digunakan untuk mencatu perancangan alat pada Wavecom. 4.1.2 Pengujian Sensor Ultrasonik
Pengujian pada perangkat sensor ultrasonik dilakukan dengan 2 pengujian:
a. Pengujian Tegangan Pin Output Sensor Ultrasonik
Pada perancangan alat digunakan sensor ultrasonik dengan cara kerja pin output sensor ultrasonik akan mengeluarkan tegangan sebesar 5 Volt apabila receiver sensor ultrasonik menerima gelombang suara dari transmitter sensor ultrasonik dan tidak mengeluarkan tegangan apabila receiver sensor ultrasonik tidak menerima gelombang suara dari transmitter sensor ultrasonik. Gambar 4.4 adalah kondisi bidang pantul terhadap sensor ultrasonik
Gambar 4.4 Kondisi Bidang Pantul Terhadap Sensor Ultrasonik
Dapat dilihat pada gambar 4.5 dan 4.6 adalah gambar dari hasil pengukuran pin output sensor ultrasonik dari ke dua kondisi seperti di gambar 4.4
Gambar 4.5 Hasil Pengukuran Pin Output Sensor Ultrasonik Kondisi 1
No Keterangan Hasil
Perhitungan (a)
Hasil Pengukuran
(b)
Persentasi Kesalahan
€=(E1-E2)/E1 x 100%
1 Catu daya
Atmega 16
Jurnal ICT Penelitian dan Penerapan Teknologi
Gambar 4.6 Hasil Pengukuran Pin Output Sensor Ultrasonik Kondisi 2
Tabel 4.4 Pengujian Sensor Ultrasonik
No Ketera
Dengan Data diatas diperoleh data pengukuran dan persentasi error pada tegangan keluaran tanpa beban, besar tegangan output 5 Volt,dengan hasil pengukuran 5.00 Volt, dan persentasi error rata-rata sebesar 0%. tidak ada terjadi kesalahan dan sesuai dengan tegangan yang diinginkan adalah 5 Volt. b. Pengukuran Luas sensor Ultrasonik
Pada Perangkat ini terdiri dari Arduino sebagai otak dari kerja perangkat dengan mengontrol perangkat input maupun output dari sensor ultrasonik. Sensor ultrasonik HC-SR04 terdiri dari bagian pemancar yang disebut transmitter dan bagian penerima yang disebut receiver. Proses kerja sensor diawali dengan sinyal ultrasonik yang dibangkitkan melalui tegangan Arduino, kemudian dipancarkan dari bagian transmitter ultrasonik. Ketika sinyal mengenai benda atau media yang berada pada arah pancar sensor ultrasonik maka sinyal akan dipantulkan dan diterima oleh receiver sensor ultrasonik.
Pengukuran luas cakupan vertikal, dilakukan pengukuran sejauh 35 cm dan dilakukan pengukuran benda sejajar dengan arah pancar sensor secara perlahan angkat keatas hingga tak terbaca jaraknya oleh sensor, dan didapatkan tinggi sampai 12 cm. seperti yang ditujukan pada gambar 4.7 .
Gambar 4.7. Pengukuran luas cakupan vertikal.
Maka nilai a dapat dihitung dengan menggunakan seperti yang ditunjukan pada gambar 4.8.
Gambar 4.8. Pengukuran luas cakupan vertikal.
Maka nilai a dapat dihitung dengan menggunakan rumus :
Tan β = 9,5 / 34 = 0,279 β = 15.60˚
Besar range area vertikal = 2 x 15.60˚= 31.2˚ Jika dilihat dalam bentuk centi meter dapat dihitung dengan rumus segitiga siku-siku dengan jarak adalah 40 cm dengan sudut horizontal adalah
31.2˚
Lebar area cakupan sensor adalah = 2 x (10.68 cm)
= 21.36 = 21 cm.
Hasil perhitungan vertikal dan horizontal dijadikan sebagai acuan penempatan sensor pada meja dimana untuk area vertikal sensor mampu
membaca dengan sudut 38˚ dan sudut horizontal
adalah sebesar 31.2˚ dengan luas 21 cm untuk jarak pengukuran yang ditentukan yaitu 40 cm.
64
seperti yang terlihat pada gambar 4.9, 4.10, 4.11, 4.12 dan 4.13
Gambar 4.9 pengujian barang yang diamankan berupa laptop
Gambar 4.10 pengujian barang yang diamankan berupa handphone
Gambar 4.11 pengujian barang yang diamankan berupa jam tangan
Gambar 4.12 pengujian barang yang diamankan berupa charger hp
Gambar 4.13 pengujian barang yang diamankan berupa dompet
Jadi, setelah dilakukan pengujian terhadap sensor ultrasonik yang dimana mampu membaca benda padat tak terkecuali apasaja barang yang
berada pada area pancar sensor ultrasonik ini. Sebab frekuensi sensor ultrasonik memiliki sifat pancaran suara yang mampu memantulkan pada permukaan benda yang keras.
4.1.3 Pengujian Scanning Keypad
Pada perancangan alat digunakan keypad 4x4 sebagai masukan data dengan sistem scanning. Pada sistem scanning ini keypad bekerja seperti saklar push button yang menghubungkan baris pada PortB.0-3 dan kolom pada PortB4-7, sedangkan pada program mengharuskan pada saat salah satu tombol ditekan (misal angka 1) PortB.4 akan mendapat logika 1 dari PortB.0 dengan begitu apabila benar akan terukur 5 Volt pada PortB.4. gambar 4.14 dan 4.15 adalah hasil pengukuran dari keypad.
Gambar 4.14 Pada Saat Keypad Ditekan
Gambar 4.15 Pada Saat Keypad Tidak Ditekan
Tabel 4.5 Pengujian Keypad
Dengan Data diatas diperoleh data pengukuran dan persentasi error pada tegangan keluaran tanpa beban, besar tegangan output 5 Volt,dengan hasil pengukuran 5.26 Volt, dan persentasi error rata-rata sebesar 5.2%, sedangkan pada tegangan output 0 Volt, hasil pengukuran 0.01 Volt dan persentasi error rata-rata sebesar 0% atau tidak adaterjadi kesalahan.
No Keterangan Hasil
Perhitungan (a)
Hasil Pengukuran
(b)
Persentasi Kesalahan
€=(E1-E2)/E1 x 100% 1 Keypad
ditekan
+ 5 Volt 5.26 Volt 5.2%
2 Keypad
tidak ditekan
0 0.01 Volt 0%
N o
Keteran gan
Hasil Perhitungan
(a)
Hasil Pengukuran
(b)
Persentasi Kesalahan €= x
100%
1 Bahaya + 5 Volt 4.27 Volt 14.6%
Jurnal ICT Penelitian dan Penerapan Teknologi
4.1.4 Pengujian Buzzer
Buzzer dalam rangkaian alat akan bekerja pada saat barang tidak berada lagi ditempat. Dalam keadaan ini PortD 4 mendapat logika 0 sehingga buzzer yang terhubung ke VCC akan berbunyi. Dengan demikian pada saat barang tidak terdeteksi maka saat diukur harus terdapat tegangan 5 Volt dengan posisi probe positif ke VCC dan probe negatif ke PortD 4. Gambar 4.16 dan 4.17 adalah hasil pengukuran output dari buzzer
Gambar 4.16 Buzzer Pada Saat Bekerja
Gambar 4.17 Buzzer Pada Saat Keadaan Aman
Dengan Data diatas diperoleh data pengukuran dan persentasi error pada tegangan keluaran tanpa beban, besar tegangan output 5 Volt,dengan hasil pengukuran 4.27 Volt, dan persentasi error rata-rata sebesar 14.6% namun tidak jadi masalah karena buzzer masih dapat bekerja dengan baik, dan pada saat aman sebesar 0.01 Volt dengan persentasi error sebesar 0% hal ini menunjukan Buzzer bekerja dengan baik.
4.2 PENGUJIAN SISTEM SECARA
KESELURUHAN
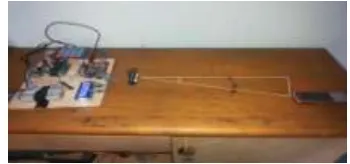
Pengujian keseluruhan pada perangkat ini adalah dengan memasang semua perangkat yang digunakan yaitu catu daya, LCD, keypad, buzzer, modem dan yang terpenting adalah sensor ultrasonik harus dari meja kearah barang. Seperti gambar 4.18
Gambar 4.18 Penempatan Alat
Setelah pemasangan selesai selanjutnya adalah menyalakan atau mengaktifkan perangkat dengan menggunakan catu daya sebesar 5 Volt. Tampilan pertama pada LCD saat pertama sekali dinyalakan
adalah akan menampilkan judul dari proyek akhir “
Sistem Pengaman Barang Dengan Sensor
Ultrasonik “ yang ditunjukkan pada gambar 4.19.
Gambar 4.19 Tampilan LCD pada saat pertama dinyalakan
Kemudian selanjutnya pada LCD akan
menampilkan tulisan “ Akatel Jakarta” dan pada
saat itu juga sensor sudah mulai bekerja, seperti yang ditunjukkan pada gambar 4.20.
Gambar 4.20 Tampilan LCD pada saat Sistem
dalam Keadaan On dan Barang dalam Keadaan
Aman
Apabila barang berpindah posisi atau tidak lagi berada ditempat maka buzzer akan berbunyi, handphone akan melakukan miscall dan mengirim
sms dan LCD akan menampilkan tulisan “Calling”
pada saat melakukan panggilan dan pemberitahuan
“sms terkirim” ke nomor yang sudah di setting
sebelumnya kemudian diikuti juga perintah untuk memasukan password seperti yang ditunjukkan pada gambar 4.21, 4.22 dan 4.23
Gambar 4.21 Tampilan LCD pada saat
66
Gambar 4.22 Tampilan LCD untuk
pemberitahuan bahwa sms telah terkirim
Gambar 4.23 Tampilan LCD untuk perintah memasukkan password
Buzzer akan berhenti berbunyi jika password yang dimasukan benar. Hal ini menandakan bahwa perangkat telah bekerja sudah dengan baik, seperti yang ditunjukkan pada gambar 4.24.
Gambar 4.24 Tampilan LCD jika Password benar
BAB V PENUTUP
5.1 KESIMPULAN
Setelah melakukan perancangan dan pembuatan alat, maka penulis dapat menarik kesimpulan sebagai berikut :
1. Hasil pengukuran perangkat sistem pengaman barang menggunakan sensor ultrasonik ini telah bekerja dengan baik, dimana pada saat kondisi sensor masih mendeteksi barang atau benda didapatkan hasil pengukuran output sebesar 5.00 Volt dan tidak ada terjadi error atau sesuiai dengan tegangan keluaran yang diinginkan. Dan pada saat kondisi sensor tidak lagi mendeteksi adanya barang didapatkan hasil pengukuran output sebesar 0.01 Volt yang artinya tidak ada terjadi error pada perangkat.
2. Padasaat barang atau benda yang dideteksi oleh sensor ultrasonik >40 cm akan menyalakan indikator berupa lampu LED dan bunyi buzzer serta pemberitahuan melalui calling dan send sms ke nomor yang dituju.
3. Hasil pengukuran luas cakupan vertical sensor ultrasonik sejauh 35 cm dilakukan dengan
pengukuran barang sejajar dengan arah pancar dari sensor ultrasonik secara perlahan angkat keatas hingga tak terbaca jaraknya oleh sensor dan didapatkan sampai ketinggian 12 cm menghasilkan
sudut sebesar 19 sensor masih dapat mendeteksi
keberadaan barang. 5.2 SARAN
Berdasarkan hasil pengujian dan pembahasan hasil yang dilakukan, sistem yang telah dibangun ini masih jauh dari kesempurnaan. Untuk itu terdapat saran-saran untuk pengembangan aplikasi yang lebih lanjut, antara lain:
1. Dalam pengembangan selanjutnya diharapkan pada mikrokontroler dan sensor ultrasonik dapat mendeteksi barang jika terjadi pertukaran barang atau benda pada area pancar sensor jarak agar dapat meningkatkan keamanan lebih pada barang yang diamankan.
2. Penggunaan LCD yang lebih besar dapat ditambahkan untuk menampilkan informasi jarak dari barang yang akan dideteksi.
DAFTAR PUSTAKA
[1].Anonymous. Pengenalan Bahasa Bascom.
http://dc145.4shared.com/doc/sv-SG3U1/preview.html. Diakses pada tanggal 20 April 2015
[2].Wardhana, L. 2006. Belajar Sendiri Mikrokontroler AVR Seri ATmega8535 Simulasi, Hardware dan Aplikasi. Yogyakarta: Andi
[3].Putra, Afgianto Eko. 2010. Mudah Menguasai Pemrograman Mikrokontroler Atmel AVR menggunakan BASCOM-AVR. Yogyakarta: Kelompok Riset DSP dan Embedded Intelligent System – ELINS Universitas Gadjah Mada [4].Putra, Afgianto Eko. 2010. Tip dan Trik
Mikrokontroler AT89 dan AVR: Tingkat Pemula Hingga Lanjut. Yogyakarta: Gava Media
[5].Putra, Afgianto Eko. 2010. Belajar Mikrokontroler AT89C51/52/55: Teori dan Aplikasi. Yogyakarta: Gava Media
[6].Wahyudin, Didin. 2007. Belajar Mudah Mikrokontroler AT89S52 dengan Bahasa Basic menggunakan Bascom-8051. Yogyakarta: Andi [7].Winoto, Ardi. 2010. Mikrokontroler AVR
ATMEGA8/32/16/8535 dan Pemrograman dengan Bahasa C pada WinAVR. Bandung: Informatika Bandung
[8].Baskara, Dasar Teori Atmega16. Diakses dari http://baskarapunya.blogspot.com/2012/09/dasa r-teori-atmega16.html , 14 April 2015
[9].Famous Studio, menggunakan sensor ultrasonik
hc-sr04. Diakses dari
http://blog.famosastudio.com/2011/12/bengkel/ menggunakan-ultrasonic-range-sensor-hc-sr04-dan-sdm-io/458 , 20 April 2015
Jurnal ICT Penelitian dan Penerapan Teknologi
[11].Electronic City , Tutorial Mengirim dan Menerima SMS dengan Wavecom Fastrack dan Mikrokontroler. Diakses dari http://technologination.blogspot.com/2011/06/tu
torial-mengirim-dan-menerima-sms.html , 23
April 2015.
[12].S, Wasito. 2006. Vademekum Elektronika. Jakarta: Gramedia Pustaka Utama
[13].Gunawan, Santo. 2011. Buku Panduan Penelitian Proyek Akhir Akademi telkom Jakarta
[14].Milah, Shihabul. Laporan Tugas Akhir dengan
Judul “Keamanan Pintu Ruangan dengan RFID dan Password Menggunakan Arduino Uno”.
Program studi DIII Teknik Telekomunikasi, Akademi Telkom Jakarta, 2014.
[15].Hadi, Mock Solikhul., 2008, Mengenal
Mikrokontroler Avr
Atmega16,http://ilmukomputer.org/wpcontent/u
ploads/2008/08/sholihul-atmega16.pdf diakses
tanggal 19 Agustus 2015.
[16].Agfianto Eko Putra and Dhani Nugraha, 2010, Tutorial Pemrograman Mikrokontroler AVR dengan WinAVR GCC (ATMega16/32/8535). https://www.scribd.com/doc/135818108/tutorial -pemrograman-mikrokontroler-avr-v1-0-pdf diakses pada tanggal 19 Agustus 2015.
[17] Ferdian, Aldi. Laporan Tugas Akhir
Dengan Judul “Rancang Bangun Alat Bantu
Parkir Mobil Menggunakan Sensor jarak
Ultrasonik Berbasis Arduino uno”. Program
Studi DIII Teknik Telekomunikasi, Sekolah Tinggi Telematika Telkom Purwokerto, 2014. [18].http://karisma_rasul.blog.ugm.ac.id/files/2013/
06/HC-SR04-lg-300x229.jpg [19].
http://4.bp.blogspot.com/-gKlljM0UDaQ/UE9NOSDW7pI/AAAAAAAA BAM/n8gjy6FGuCg/s320/Konfigurasi+PIN+A
TMega16+PDIP.png
[20] http://elektronika-dasar.web.id/wp-
content/uploads/2012/06/Konstruksi-Matrix-Keypad-4x4-Untuk-Mikrokontroler.jpg
[21]http://static.rapidonline.com/catalogueimages/
Module/M071394P01WL.jpg
[22]
http://2.bp.blogspot.com/-vjcSE-gijWM/UjHScXaWOGI/AAAAAAAAAQM/_