HALAMAN JUDUL
TUGAS AKHIR – TE 141599
PENGATURAN KECEPATAN MOTOR DC PADA SIMULATOR
HYBRID ELECT RIC VEHICLE (HEV) MENGGUNAKAN
KONTROLER PID BERDASARKAN ALGORITMA PART ICLE
SWARM OPT IMIZAT ION (PSO)
Alif Ridwan Maulana NRP 2211 100 117
Dosen Pembimbing
Ir. Rusdhiant o Ef f endie A. K. , M. T. Ir. Ali Fat oni, M. T.
JURUSAN TEKNIK ELEKTRO Fakult as Teknologi Indust ri
HALAMAN JUDUL
FINAL PROJECT – TE 141599
DC MOT OR SPEED CONT ROL FOR HYBRID ELECT RIC
VEHICLE (HEV) SIMULAT OR USING PID CONT ROLLER
BASED ON PART ICLE SWARM OPT IMIZAT ION (PSO)
ALGORIT HM
Alif Ridwan Maulana NRP 2211 100 117
Supervisors
Ir. Rusdhiant o Ef f endie A. K. , M. T. Ir. Ali Fat oni, M. T.
ELECTRICAL ENGINEERING DEPARTMENT Facult y of Indust rial Technology
PENGATURAN KECEPATAN MOTOR DC PADA SIMULATOR HYBRID ELECTRIC VEHICEL (HEV) MENGGUNAKAN KONTROLER PID BERDASARKAN ALGORITMA PARTICLE SWARM OPTIMIZATION (PSO)
Nama : Alif Ridwan Maulana
Pembimbing : 1. Ir. Rusdhianto Effendie A.K., M.T. 2. Ir. Ali Fatoni, M.T.
ABSTRAK
Salah satu solusi jangka pendek yang sedang dilakukan oleh industri automotif guna mengurangi ketergantungan dunia akan penggunaan bahan bakar minyak dan mengurangi emisi gas buang kendaraan adalah dengan adanya teknologi Hybrid Electric Vehicle (HEV). Namun HEV sendiri memiliki kelemahan ketika adanya pembebanan berlebih. Disamping itu, untuk menjaga performansi HEV agar tetap baik, maka digunakan kontroler yang tepat untuk menanggulangi permasalahan tersebut. Algoritma PSO digunakan dalam proses tuning parameter kontroler PID untuk pengaturan kecepatan pada simulator HEV. Oleh karena itu, dengan menggunakan algoritma PSO pada kontroler PID diharapkan mampu memperoleh nilai parameter Kp, Ki, dan Kd yang optimal. Kemudian dengan parameter PSO w = 0,48 jumlah partikel, n = 10 dan jumlah iterasi, iter = 30 diperoleh nilai parameter kontroler PID Kp = 9,798, Ki = 20,863, dan Kd = 0,153. Berdasarkan hasil pengujian secara simulasi, motor DC dapat membantu kinerja ICE terhadap adanya pembebanan berupa arus pengereman (0,7 A; 0,8 A; 0,9 A) yang selanjutnya diperoleh data performansi HEV berupa penurunan kecepatan putar sebesar 6 – 11 rpm, rata – rata settling time (𝑡𝑡𝑠𝑠= 1,6 detik) serta
𝐸𝐸𝑠𝑠𝑠𝑠= 0% dan overshoot = 0 rpm. Dari data performansi HEV tersebut, maka simulator HEV telah mampu mempertahankan kecepatan putar sesuai dengan set point yang diberikan.
Kata Kunci : Hybrid Electric Vehicle, Kontroler PID, Particle Swarm Optimization,
Halaman ini sengaja dikosongkan
DC MOTOR SPEED CONTROL FOR HYBRID ELECTRIC VEHICLE (HEV) SIMULATOR USING PID CONTROLLER
BASED ON PARTICLE SWARM OPTIMIZATION (PSO) ALGORITHM
Name : Alif Ridwan Maulana
Supervisors : 1. Ir. Rusdhianto Effendie A.K., M.T. 2. Ir. Ali Fatoni, M.T.
ABSTRACT
One short-term solution that is being conducted by the automotive industry to reduce the world's reliance will the use of fuel oil and reduce vehicle exhaust emissions are with the technology Hybrid Electric Vehicle (HEV). However HEV itself has drawbacks when the excess load. In addition, to maintain the performance of HEV in order to remain good, then use the right controller to overcome these problems. PSO algorithm used in the process PID controller tuning parameters for setting the pace on the simulator HEV. Therefore, using the PSO algorithm in PID controllers are expected to obtain the value of the parameter Kp, Ki, and Kd are optimal. Then the PSO parameter w = 0.48 number of particles, n = 10 and the number of iterations, iter = 30 parameter values obtained PID controller Kp = 9.798, Ki = 20.863, and Kd = 0.153. Based on test results in simulation, the DC motor can help the performance of ICE against the imposition of such braking current (0.7 A; 0.8 A; 0.9 A), hereinafter the data obtained in the form of a decrease in the performance of HEV rotational speed of 6-11 rpm, the average settling time (𝑡𝑡𝑠𝑠 = 1.6 sec) and 𝐸𝐸𝑠𝑠𝑠𝑠 = 0% and overshoot = 0 rpm. HEV performance of the data, then the HEV simulator has been able to maintain the rotational speed in accordance with a given set point.
Keywords : Hybrid Electric Vehicle, Particle Swarm Optimization, PID Controller,
Halaman ini sengaja dikosongkan
KATA PENGANTAR
Puji syukur Kehadirat Alloh SWT yang selalu senantiasa memberikan kasih dan sayang – Nya sehingga penulis dapat menyelesaikan Tugas Akhir dengan judul Pengaturan Kecepatan Motor DC pada Simulator Hybrid Electric Vehicle (HEV) Menggunakan Kontroler PID Berdasarkan Algoritma Particle Swarm Optimization (PSO) tepat pada waktunya. Tak lupa Sholawat serta salam selalu tercurahkan kepada junjungan Nabi Muhammad SAW yang telah membimbing umatnya menuju jalan yang terang – benerang. Tugas Akhir yang telah disusun ini merupakan syarat yang harus dipenuhi dalam mencapai gelar Sarjana Teknik di Bidang Studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Surabaya.
Penulis juga menyadari bahwa isi buku Tugas Akhir ini masih sangat jauh dari sempurna. Untuk itu, penulis mohon maaf yang sebesar – besarnya atas kesalahan atau kekurangan dalam menulis buku ini. semoga penelitian dalam Tugas Akhir ini bisa dilanjutkan dan dikembangkan oleh generasi penerus sehingga didapatkan hasil yang lebih baik di kemudian hari. Oleh karena itu, penulis menyampaikan rasa terima kasih yang sebesar – besarnya kepada:
1. Bapak Ir. Rushianto Effendie A.K, MT. Dan Bapak Ir. Ali Fatoni, MT. Selaku pembimbing yang telah dengan arif dan sabar dalam mengarahkan dan membimbing penulis selama proses pengerjaan Tugas Akhir ini.
2. Kedua orang tua penulis yang selalu senantiasa menasehati dan mendo’akan penulis atas keberhasilan Tugas Akhir ini. 3. Hendra Antomy anak Pulung Ponorogo yang telah
memberikan masukan dan pemahaman konsep selama masa perkuliahan.
4. Ajib Setiawan N., Sentosa Sondang O., Faniesha H., Mbak Aulia Rahma A., dan Mas Fahrul selaku rekan satu tim penulis dalam pengerjaan Tugas Akhir ini.
5. Tito, Adi, Dino, Dedy, Muji, Engkong, Saf, dan Lung selaku kawan berbagi ilmu di kontrakan.
6. Teman – teman dari Kediri, SP 2011, dan keluarga e-51 yang sudah memberikan cerita indah selama mejalani proses perkuliahan di kampus.
7. Semua pihak yang telah ikut membantu baik secara langsung maupun tidak langsung dalam pegerjaan Tugas Akhir ini. Akhir kata, penulis sekali lagi menyampaikan mohon maaf atas segala kekurangan yang terdapat dalam buku Tugas Akhir ini. Semoga hasil Tugas Akhir ini dapat memberikan manfaat dalam pengembangan ilmu pengetahuan dan teknologi.
Surabaya, Juli 2015
Penulis
DAFTAR ISI
HALAMAN JUDUL ... i
PERNYATAAN KEASLIAN TUGAS AKHIR ... v
HALAMAN PENGESAHAN ... vii
ABSTRAK ... ix
ABSTRACT ... xi
KATA PENGANTAR ... xiii
DAFTAR ISI ... xv
DAFTAR GAMBAR ... xix
DAFTAR TABEL ... xxi
1.5. Sistematika Penulisan ... 3
1.6. Relevansi ... 4
BAB 2 DASAR TEORI ... 5
2.1. Hybrid Electric Vehicle (HEV) ... 5
2.2. SimulatorHEV... 7
2.2.1. Internal Combustion Engine (ICE) 2 Tak ... 7
2.2.2. Motor DC ... 10
2.2.3. Rem Elektromagnetik Arus Eddy ... 12
2.2.4. Gear ... 14
2.2.5. Rotary Encoder ... 16
2.3. Arduino Uno R3 ... 17
2.4. Identifikasi Sistem ... 19
2.4.1. Metode Identifikasi Fisik ... 19
2.4.2. Metode Idetifikasi Strej ... 21
2.4.3. Root Mean Square Error (RMSE) ... 23
2.5. Kontroler PID... 24
2.6. Particle Swarm Optimiation(PSO) ... 25
BAB 3 PERANCANGAN SISTEM ... 31
3.1. Gambaran Umum Simulator HEV ... 31
3.2. Perancangan Perangkat Keras (Hardware) ... 32
3.2.2. Perancangan Elektronik ... 39
3.3. Perancangan Perangkat Lunak (Software) ... 43
3.3.1. Software Arduino ... 44
3.3.2. Software LabVIEW ... 45
3.3.3. Software MATLAB ... 46
3.4. Pengujian Sensor ... 47
3.4.1. Pengujian Sensor Rotary Encoder ... 47
3.4.2. Pengujian Sensor Potensiometer ... 49
3.5. Identifikasi dan Pemodelan Sistem ... 49
3.5.1. Identifikasi Parameter Motor DC ... 50
3.5.2. Pemodelan Motor DC... 55
3.5.3. Identifikasi Parameter Beban ... 56
3.5.4. Identifikasi ICE ... 58
3.5.5. Pemodelan ICE ... 59
3.6. Pengujian dan Validasi ... 65
3.7. Desain Kontroler PID – PSO ... 69
3.7.1. Algoritma PSO Untuk Tuning Parameter PID ... 69
3.7.2. Desain Simulink PID – PSO ... 72
BAB 4 PENGUJIAN DAN ANALISIS ... 73
4.1. Gambaran Umum Pengujian Sistem ... 73
4.2. Simulasi Sistem ... 73
4.2.1. Simulasi dengan Tuning PSO ... 73
4.2.2. Simulasi ICE Berbeban Tanpa Bantuan Motor DC ... 76
4.2.3. Simulasi ICE Berbeban dengan Bantuan Motor DC Menggunakan Kontroler PID - PSO ... 78
4.3. Implementasi Sistem ... 81
4.3.1. Implementasi ICE Berbeban Tanpa Bantuan Motor DC ... 81
4.3.2. Implementasi ICE Beberbean dengan Bantuan Motor DC Menggunakan Kontroler PID - PSO ... 82
BAB 5 PENUTUP ... 85
5.1. Kesimpulan ... 85
5.2. Saran ... .... 85
DAFTAR PUSTAKA ... 87
LAMPIRAN ... 89
A. Tampilan Simulink Simulasi HEV ... 89
B. Tampilan Simulink Motor DC... 90
Main Program ... 91 Sub Program ... 95 RIWAYAT PENULIS ... 97
Halaman ini sengaja dikosongkan
DAFTAR TABEL
Tabel 2.1 Perbandingan Kapasitas dari Konfigurasi HEV ... 7
Tabel 2.2 Spesifikasi board Arduino Uno ... 18
Tabel 2.3 Nilai Konstan Rasio T ... 22
Tabel 2.4 Taksiran dari Orde ke - n dan Nilai Titik Singgung ... 23
Tabel 2.5 Efek Tiap Parameter ... 25
Tabel 3.1 Spesifikasi ICE ... 34
Tabel 3.2 Spesifikasi Motor DC ... 35
Tabel 3.3 Data Hasil Pembacaan Kecepatan Putar dari Tachometer Digital dan Rotary Encoder ... 48
Tabel 3.4 Data Hasil Linearisasi dan Hasil Pengukuran ... 48
Tabel 3.5 Data Hasil Pengukuran untuk Ra, La, Rf, Lf ... 50
Tabel 3.6 Data Kontstanta Balik Motor DC Hasil Percobaan ... 51
Tabel 3.7 Data Nilai Parameter Iamax, Ifmax, Ianom, dan Ifnom... 52
Tabel 3.8 Data Nilai Parameter Vin1, Vin2, Ia1, Ia2, If1, dan If2 ... 54
Tabel 3.9 Data Hasil Pengukuran Rem Elektromagnetik ... 57
Tabel 3.10 Persamaan Model dan Validasi Plant ICE ... 66
Tabel 3.11 Persamaan Model dan Validasi Plant ICE ... 67
Tabel 3.12 Persamaan Model dan Validasi Plant ICE ... 68
Tabel 3.13 Model Plant ICE yang Digunakan ... 69
Tabel 3.14 Pemodelan dengan Beberapa Metode ... 69
Tabel 4.1 Hasil Tuning Kp, Ki, dan Kd dengan PSO ... 74
Tabel 4.2 Variasi Arus Pengereman pada Rem Elektromagnetik ... 76
Tabel 4.3 Performansi HEV dengan Kontroler PID - PSO ... 79
Halaman ini sengaja dikosongkan
DAFTAR GAMBAR
Gambar 2.13 Tampilan Framework Arduino ... 19
Gambar 2.14 Konfigurasi Fisik Motor DC Paralel ... 20
Gambar 2.15 Diagram Blok Motor DC Paralel ... 20
Gambar 3.3 Konfigurasi Perangkat Keras Simulator HEV ... 33
Gambar 3.4 Mesin Pemotong Rumput 2 Tak ... 33
Gambar 3.10 Skema Rangkaian Optocoupler ... 41
Gambar 3.11 Sistem Minimum Arduino Uno R3 ... 42
Gambar 3.12 Skema Rangkaian Penyearah Gelombang Penuh ... 42
Gambar 3.13 Bentuk Fisik Rangkaian Penyearah Gelombang Penuh ... 43
Gambar 3.14 Tampilan Program Arduino ... 44
Gambar 3.15 Tampilan Diagram Blok LabVIEW ... 45
Gambar 3.16 Menu Editor pada MATLAB ... 46
Gambar 3.17 Tampilan Simulink ... 46
Gambar 3.19 Grafik Kecepatan Putar Hasil Linearisasi dengan
Hasil Pengukuran Tachometer Digital ... 49
Gambar 3.20 Diagram Blok Motor DC ... 55
Gambar 3.21 Respon Keluaran Motor DC saat Diberikan Masukan Sinyal Step ... 57
Gambar 3.22 Respon Kecepatan Putar ICE dengan Beban Minimal ... 61
Gambar 3.23 Respon Kecepatan Putar ICE dengan Beban Nominal ... 63
Gambar 3.24 Respon Kecepatan Putar ICE dengan Beban Maksimal ... 65
Gambar 3.25 Respon Hasil Identifikasi dan Pemodelan ICE ... 66
Gambar 3.26 Respon Hasil Identifikasi dan Pemodelan ICE ... 67
Gambar 3.27 Respon Hasil Identifikasi dan Pemodelan ICE ... 68
Gambar 3.28 Diagram Alir Algoritma PSO ... 71
Gambar 3.29 Diagram Simulink ... 72
Gambar 4.1 Konvergensi PSO saat Bobot Inersia w = 0,38 ... 75
Gambar 4.2 Konvergensi PSO saat Bobot Inersia w = 0,48 ... 75
Gambar 4.3 Konvergensi PSO saat Bobot Inersia w = 0,58 ... 76
Gambar 4.4 Respon Kecepatan Putar ICE dengan 3 Variasi Beban Arus Pengereman ... 77
Gambar 4.5 Besar Arus Pengereman yang Diberikan ... 77
Gambar 4.6 Sinyal Kesalahan ICE dengan 3 Variai Beban Arus Pengereman ... 78
Gambar 4.7 Respon Kecepatan Putar HEV dengan 3 Variasi Beban Arus Pengereman ... 79
Gambar 4.8 Sinyal Kontrol yang Diberikan pada Motor DC ... 80
Gambar 4.9 Sinyal Kesalahan dari Sistem dengan 3 Variasi Beban Arus Pengereman ... 80
Gambar 4.10 Respon Kecepatan Putar ICE dengan Beban 0,9 A ... 81
Gambar 4.11 Respon Kecepatan Putar HEV dengan Kontroler PID – PSO dengan Beban Arus Pengereman 0,9 A ... 82
BAB 1
PENDAHULUAN
Tugas Akhir merupakan salah satu bentuk penelitian mandiri yang dilakukan oleh mahasiswa pada jenjang S-1. Tugas Akhir sendiri merupakan syarat wajib untuk menyelesaikan studi dalam program sarjana teknik. Untuk Tugas Akhir yang penulis kerjakan berupa perancangan dan penelitian.
Pada bab ini akan dijelaskan mengenai hal-hal yang mengawali pelaksanaan Tugas Akhir. Hal-hal tersebut meliputi larar belakang, perumusan masalah, batasan masalah, tujuan, sistematika penulisan, dan relevansi.
1.1.
Latar Belakang
Jumlah populasi penduduk yang semakin meningkat dan diiringi dengan bertambahnya jumlah penggunaan kendaraan bermotor, memaksa ketergantungan terhadap bahan bakar minyak (BBM) pada sistem transportasi juga semakin meningkat, khususnya transportasi di darat. Selain itu, kendaraan yang mengkonsumsi bahan bakar minyak sebagai sumber tenaganya bisa dipastikan gas buangnya menghasilkan emisi gas berbahaya yang menjadi salah satu penyebab polusi udara. Di sisi lain, cadangan minyak bumi yang juga semakin berkurang membuat dunia industri automotif harus memikirkan solusi yang tepat untuk mengatasi keadaan tersebut. Untuk itu, salah satu solusi jangka pendek yang diberikan oleh industri automotif dalam mengurangi kebutuhan akan bahan bakar minyak dan jumlah emisi gas buang kendaraan di masa depan adalah dengan adanya konsep teknologi Hybrid Electric Vehicle (HEV) [1].
Kendaraan Hybrid Electric Vehicle (HEV) dengan mesin hybrid merupakan kendaraan yang menggunakan dua atau lebih tenaga sebagai sumber penggerak, dalam hal ini gabungan antara mesin bakar atau Internal Combustion Engine (ICE) yang ada pada kendaraan umumnya dengan motor listrik atau Electric Motor (EM). Pada mesin hybrid, tenaga yang digunakan untuk menggerakkan kendaraan bisa berasal dari mesin bakar, motor listrik, maupun gabungan diantara keduanya. Dengan adanya mesin hybrid maka mesin bakar tidak lagi bekerja sendiri untuk menopang tenaga dalam menggerakkan kendaraan tetapi juga dibantu oleh motor listrik. Di samping itu, kelebihan dari mesin hybrid sendiri
yaitu ketika mesin bakar tidak mampu mempertahankan kecepatan maka motor listrik akan membantu memberikan tenaga. Dengan kombinasi kedua sumber tenaga penggerak tersebut, diharapkan jumlah kebutuhan energi minyak dan emisi gas buang kendaraan dapat berkurang.
Untuk menghasilkan performansi yang baik, maka PID digunakan sebagai kontroler dalam membantu mengatur kecepatan motor listrik pada kendaraan HEV, sehingga diharapkan dapat membantu ICE ketika terjadi pembebanan berlebih yang dapat menurunkan kecepatan putar kendaraan HEV. Kemudian untuk memperoleh nilai dari parameter Kp, Ki, dan Kd yang optimal, maka digunakanlah metode komputasi cerdas Particle Swarm Optimization (PSO) [2]. Sehingga dari penggunaan metode komputasi cerdas PSO pada kontorler PID tersebut diharapkan mampu mengatur kecepatan motor listrik untuk membantu ICE ketika terjadi pembebanan berlebih yang dapat mengakibatkan penurunan kecepatan kendaraan.
1.2.
Perumusan Masalah
Pada saat kendaraan berada pada medan yang berat, seperti harus melalui banyak tanjakan. Kecepatan dari kendaraan secara tidak langsung akan mengalami penurunan yang dikarenakan adanya beban berlebih pada kendaraan tersebut. Kondisi seperti iut juga akan mempengaruhi performansi dari kendaraan tersebut. Di mana akan dibutuhkan tenaga tambahan untuk mampu melakukan akselerasi dengan cepat saat terjadi pembebanan yang berlebih sehingga nantinya kecepatan kendaraan dijaga tetap sesuai dengan laju yang dikehendaki. Dan kendaraan hybrid mampu untuk melakukan hal tersebut, karena pada mesin hybrid terdapat motor listrik yang mampu membantu mesin bakar dalam memenuhi kebutuhan kecepatan ketika terjadi pembebanan lebih. Pada simulator HEV, motor listrik dan mesin bakar jenis ICE mampu bekerja secara bersama – sama untuk menopang beban.
Oleh karena itu, dibutuhkan suatu kontroler yang mampu menjaga performa dari kecepatan putar HEV. Salah satunya dengan mengatur kecepatan putar motor listrik untuk membantu kinerja ICE. Pada Tugas Akhir ini digunakan kontroler PID untuk mengatur kecepatan motor listrik. Kemudian untuk nilai dari parameter kontroler (Kp, Ki, dan Kd) akan diperoleh dengan menggunakan metode pencarian Particle Swarm Optimization (PSO). Selain itu, dalam sistem simulator HEV untuk
merepresentasikan dari adanya pengaruh jalan yang menanjak, maka ditambahkan rem elektromagnetik untuk pembebanan.
1.3.
Batasan Masalah
Pada penyelesaian Tugas Akhir ini diberi beberapa batasan masalah sebagai berikut:
1. Plant yang digunakan adalah simulator HEV yang terdiri dari ICE sebagai penggerak utama dan motor DC sebagai penggerak pembantu serta rem elektromagnetik sebagai pemberi efek pembebanan.
2. Pada simulator HEV, ICE telah dapat mencapai set point yang diinginkan, dan efek beban dari rem elektromagnetik akan menyebabkan penurunan kecepatan ICE dan motor DC bekerja sebagai penggerak pembantu dalam mengembalikan kecepatan simulator HEV.
3. Penghitungan parameter Kp, Ki, dan Kd dilakukan secara offline.
1.4.
Tujuan
Tujuan pada penelitian Tugas Akhir ini adalah untuk merancang simulasi dan mengimplementasikan kontroler PID berdasarkan algoritma Particle Swarm Optimization (PSO). Selain itu, dari hasil penerapan metode PSO dalam tuning parameter PID dapat memberikan hasil yang optimal. Di mana mampu membantu memperbaiki performa sistem yang dihasilkan, terutama dalam permasalahan regulator berupa pengaturan kecepatan putar HEV pada kondisi pembebanan berlebih.
1.5.
Sistematika Penulisan
Sistematika penulisan dalam pembahasan Tugas Akhir ini terdiri dari lima bagian, yaitu:
BAB 1 : PENDAHULUAN
Pada bab ini dijelaskan tentang latar belakang, perumusan masalah, batasan masalah, tujuan, sistematika penulisan dan relevansi.
BAB 2 : DASAR TEORI
Berisi tentang teori dasar yang meliputi Hybrid Electric Vehicle, kontroler PID, serta Particle Swarm Optimization yang akan digunakan sebagai landasan dasar dalam menyusun Tugas Akhir ini.
BAB 3 : PERANCANGAN SISTEM
Pada bab 3 ini berisi penjelasan mengenai perancangan hardware (perancangan komponen mekanik dan perancangan komponen elektronik) serta software (MATLAB, LABVIEW, dan Arduino) yang digunakan dalam pengerjaan Tugas Akhir. BAB 4 : PENGUJIAN DAN ANALISIS
Bab ini memuat tentang hasil simulasi dan implementasi untuk penerapan dari kontroler PID – PSO pada plant simulator HEV.
BAB 5 : KESIMPULAN DAN SARAN
Berisi pemaparan kesimpulan dan saran dari hasil pembahasan yang telah diperoleh serta sebagai pertimbangan bagi pembaca untuk pengembangan dari Tugas Akhir ini selanjutnya.
1.6.
Relevansi
Diharapkan Tugas Akhir ini dapat memberikan manfaat dan referensi untuk penelitian selanjutnya terutama dalam strategi kontrol untuk mengatur kecepatan HEV sehingga performa regulasi yang dihasilkan lebih optimal.
BAB 2
DASAR TEORI
Pada Bab 2 akan dipaparkan mengenai teori-teori dasar yang digunakan sebagai landasan dalam pengerjaan Tugas Akhir ini. Diantaranya teori mengenai Hybrid Electric Vehicle (HEV), Internal Combustion Engine (ICE), kontroler PID, serta Particle Swarm Optimization (PSO) akan dibahas pada bab ini.
2.1.
Hybrid Electric Vehicle (HEV)
[3] [4]
Pada umumnya, perbedaan konfigurasi antara Hybrid Electric Vehicle (HEV) dan kendaraan bermotor konvensional salah satunya terletak pada tenaga penggerak yang digunakan. Untuk kendaraan HEV menggunakan mesin bakar dan motor listrik, sedangkan kendaraan bermotor konvensional hanya menggunakan mesin bakar saja. HEV merupakan suatu kendaraan yang menggunakan Internal Combustion Engine (ICE) yang menjadi tenaga penggerak utama dan motor listrik sebagai pendukung. Bisa dikatakan jika dalam situasi tertentu HEV bisa menggunakan hanya satu sumber penggerak dan bisa juga menggunakan sumber penggerak pendukung dalam situasi yang berbeda.
Berdasarkan konfigurasinya HEV dapat dibagi menjadi tiga yaitu konfigurasi seri, konfigurasi paralel, dan konfigurasi seri-paralel. Kemudian untuk konfigurasi seri, sumber tenaga penggerak kendaraan diperoleh dari motor listrik. Arus listrik untuk mendrive motor diperoleh dari pembakaran mesin dengan menggunakan bahan bakar. Energi kinetik hasil pembakaran mesin akan diubah menjadi energi listrik oleh generator yang selanjutnya akan disimpan di dalam baterai untuk digunakan sebagai penggerak motor. Jadi mesin bakar hanya digunakan untuk menghasilkan energi listrik, sedangkan untuk penggerak kendaraan menggunakan motor listrik. Konfigurasi seri ditunjukkan oleh Gambar 2.1(a).
Selanjutnya untuk konfigurasi paralel, tenaga yang digunakan sebagai sumber penggerak bisa menggunakan mesin bakar, motor listrik, atau kombinasi dari keduanya karena mesin bakar dan motor listrik berada pada satu poros yang sama. Dalam konfigurasi jenis ini pengaturan kerja motor listrik penting sehingga tidak memboroskan energi yang tersimpan di dalam baterai. Karena motor listrik pada konfigurasi ini bisa difungsikan sebagai motor maupun generator. Untuk konfigurasi paralel sendiri ditunjukkan pada Gambar 2.1(b).
Untuk konfigurasi seri-paralel ini yang ditunjukkan pada Gambar 2.1(c) disebut juga dengan konfigurasi power split, di mana pada konfigurasi ini terdapat perbedaan utama dari konfigurasi yang lain yaitu dengan adanya power split device. Komponen ini mampu membagi alur energi yang dihasilkan oleh sumber sesuai dengan kebutuhan kendaraan. Seperti pada kendaraan hybrid Toyota Prius, komponen tersebut berupa gear yang memiliki bentuk menyerupai sistem tata surya yang Toyota menyebutnya planetary gear. Komponen dari planetary gear dapat dilihat pada Gambar 2.2.
Gambar 2.1 Konfigurasi HEV
Pada Tabel 2.1 dapat dilihat perbandingan kapasitas konfigurasi seri, paralel, dan seri-paralel (power split device).
Tabel 2.1 Perbandingan Kapasitas dari Konfigurasi HEV
Pada penelitian Tugas Akhir ini simulator HEV yang akan digunakan memiliki konfigurasi paralel. Sumber penggerak pada simulator adalah mesin bakar dengan didukung motor listrik.
2.2.
Simulator HEV
Pada penelitian ini simulator HEV yang digunakan terdiri dari Internal Combustion Engine (ICE) 2 langkah sebagai penggerak utama, motor DC sebagai elemen penggerak pendukung serta beban berupa rem elektromagnetik.
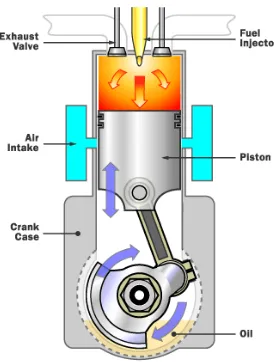
2.2.1. Internal Combustion Engine (ICE) 2 Langkah [5]
Motor bakar merupakan mesin yang menggunakan energi termal untuk melakukan kerja mekanik, yaitu dengan cara mengubah energi kimia dari bahan bakar menjadi energi panas, dan menggunakan energi tersebut untuk melakukan kerja mekanik. Untuk jenis motor bakar sendiri dibagai menjadi 2 yaitu motor bakar dalam atau Internal Combustion Engine (ICE) dan motor bakar luar atau External Combustion Engine (ECE). Dan pada Tugas Akhir ini jenis motor bakar yang digunakan adalah ICE. Pada ICE, proses pembakaran bahan bakar terjadi di dalam mesin itu sendiri sehingga panas dari hasil pembakaran langsung bisa diubah menjadi energi mekanik. Untuk komponen ICE ini dapat dilihat pada Gambar 2.3.
Tipe Efisiensi Bahan Bakar Performansi
Idling
Stop Recovery Energy Efisiensi Akselerasi Kestabilan Kecepatan
Seri Baik Sangat baik Baik Kurang baik Kurang baik
Paralel Baik Baik Baik Baik Kurang baik
Seri –
Paralel Sangat baik Sangat baik Sangat baik Baik Baik
Secara umum motor bakar jenis ICE dibagi menjadi 2, yaitu mesin 2 langkah dan mesin 4 langkah. Pada mesin 2 langkah tahap kerjanya yaitu motor bakar memerlukan dua kali langkah torak yang berupa satu kali ke atas (ascending stroke) dan satu kali ke bawah (descending stroke) untuk mendapatkan satu kali usaha di ruang pembakaran. Piston yang bergerak naik dari titik mati bawah (TMB) ke titik mati atas (TMA) menyebabkan saluran bilas dan saluran buang akan tertututp. Dalam hal ini gas yang berada dalam ruang pembakaran dikompresikan.
Di sisi lain, untuk gas yang baru masuk ke dalam ruang engkol, beberapa derajat sebelum piston mencapai titik mati atas, busi akan meloncatkan bunga api sehingga akan terjadi pembakaran bahan bakar. Kemudian untuk tampilan prinsip kerja ICE 2 langkah dapat dilihat pada Gambar 2.4. Kelemahan ICE 2 langkah yaitu pada saat campuran bahan bakar dan udara memasuki ruang bakar, terjadi pencampuran dengan gas buang hasil pembakaran siklus sebelumnya, akibatnya mengurangi tenaga keluaran motor bakar.
Gambar 2.3 Komponen pada Ruang Bakar ICE
Prinsip kerja dari ICE 2 langkah tersebut secara runtut akan dijelaskan pada penjelasan di bawah ini:
a. Tahap Pengisapan dan Kompresi
Awalnya piston bergerak ke atas sehingga ruang bawah piston menjadi hampa udara, akibatnya udara dan campuran bahan bakar terisap masuk ke dalam ruang di bawah piston. Selanjutnya, dibagian ruang atas piston terjadi langkah kompresi, sehingga udara dan campuran bahan bakar yang sudah berada di ruang atas piston, suhu dan tekanannya menjadi naik. Pada saat 10-5 derajat sebelum TMA, busi akan memercikan bunga api serta mengakibatkan campuran udara dan bahan bakar yang telah naik temperatur dan tekanannya menjadi terbakar dan meletup – letup. b. Tahap Kerja dan Buang
Dari hasil pembakaran sebelumnya membuat piston bergerak ke bawah. Ketika piston bergerak ke bawah, ruang di bawah piston menjadi dimampatkan / dikompresikan akibatnya campuran udara dan bahan bakar yang berada di ruang bawah piston menjadi terdesak keluar dan naik ke ruang di atas piston melalui saluran bilas. Sedangkan sisa hasil pembakaran sebelumnya akan terdorong keluar dan menuju saluran buang, dan akhirnya menuju knalpot.
Gambar 2.4 Prinsip Kerja ICE 2 langkah
2.2.2. Motor DC [6]
Motor listrik merupakan perangkat elektromagnetis yang digunakan untuk mengubah energi listrik menjadi energi gerak. Motor listrik sendiri dibagi menjadi dua jenis, yaitu motor arus bolak-balik atau Alternating Current (AC) dan motor arus searah atau Direct Current (DC). Dan yang digunakan pada Tugas Akhir ini adalah motor listrik arus searah (DC). Untuk tipe motor DC yang digunakan adalah motor DC Shunt. Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor DC terdiri dari stator (bagian yang tidak berputar) dan kumparan jangkar yang disebut rotor (bagian yang berputar).
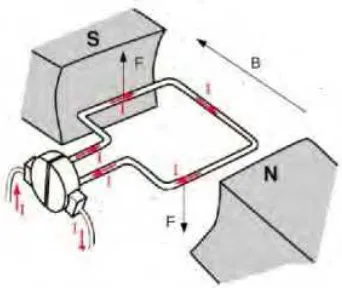
Pada motor DC magnet permanen terdiri dari magnet permanen, kumparan jangkar, dan sikat (brush). Terdapat dua prinsip dasar yang melatar belakangi kerja dari motor DC. Medan magnet menghasilkan magnet permanen yang nilainya konstan, sedangkan komutator dan sikat berfungsi menyalurkan arus listrik dari sumber di luar motor ke dalam kumparan jangkar. Untuk medan stator menghasilkan 𝜙𝜙 dari kutub U ke kutub S. Selanjutnya sikat arang menyentuh terminal kumparan rotor di bawah kutub. Bila sikat arang dihubungkan pada satu sumber arus searah di luar tegangan V, maka arus I masuk ke terminal kumparan rotor di bawah kutub U dan keluar dari terminal di bawah kutub S.
Dengan adanya fluks stator dan arus rotor akan menghasilkan satu gaya F bekerja pada kumparan yang dikenal dengan gaya Lorentz. Besar gaya Lorentz yang dihasilkan dapat ditentukan berdasarkan Persamaan (2.1).
𝐹𝐹=𝐵𝐵𝐼𝐼𝐿𝐿sin𝜃𝜃 (2.1)
Dengan,
F : Gaya Lorent (N)
B : Kerapatan fluks magnet (Weber/m2)
I : Arus yang mengalir (Ampere) L : Panjang kawat penghantar (m)
𝜃𝜃 : Sudut yang dibentuk antara arah arus medan dengan arah arus yang mengalir pada kawat (derajat)
Pada saat arus mengalir melewati kawat yang memotong medan magnet seperti Gambar 2.5, maka akan terjadi gaya Lorentz. Dari pada itu gaya Lorentz inilah yang menimbulkan torsi pada shaft motor. Karena
dasarnya motor DC membangkitkan torsi, maka seringkali disebut sebagai pembangkit torsi. Selain itu, terdapat pula komutator yang berfungsi untuk membalik polaritas, yang menyebabkan arus mengalir dengan arah yang berlawanan dari sebelumnya. Komutator secara fisik berupa segmen-segmen, biasanya terbuat dari tembaga dan terletak pada rotor.
Kemudian untuk konstruksi dari motor DC dapat dibedakan menjadi brushed, brushless, dan magnet permanen. Motor DC brushless tidak menggunakan komutator dan sikat arang untuk memberikan daya listrik dari sumber listrik ke rotor, serta motor DC magnet permanen menggunakan magnet permanen di stator sebagai penghasil medan magnet. Karena meniadakan kumparan medan, maka memungkinkan motor memiliki bobot yang ringan dan ukuran yang lebih kecil. Motor DC brushed karena konstruksinya yang sederhana, menjadikan motor DC brushed berharga lebih murah, dan juga kemampuannya yang cukup baik, maka motor tipe ini lebih sering dipakai di industri. Motor DC brushed terdiri dari beberapa macam konfigurasi, yaitu shunt, compound, dan seri. Dan ketiganya memiliki karakteristik yang berbeda-beda. Karakteristik masing-masing konfigurasi dapat dilihat pada Gambar 2.6.
Gambar 2.5 Gaya Lorentz pada Motor DC
2.2.3. Rem Elektromagnetik Arus Eddy [7]
Rem merupakan suatu komponen yang digunakan untuk melakukan aksi deselerasi yang mampu menurunkan kecepatan dalam selang waktu tertentu. Secara umum, tipe rem yang digunakan adalah rem yang menggunakan gaya gesek untuk memberikan gaya lawan terhadap gaya gerak. Model yang umum digunakan berupa piringan cakram ataupun model drum (tromol). Sebuah piringan dengan bahan logam non-Gambar 2.6 Karakteristik Motor DC
feromagnetik terpasang dengan poros yang berputar. Piringan tersebut diapit oleh sisi stator berupa sistem lilitan elektromagnetik yang dapat membangkitkan medan magnet dari aliran listrik. Arus listrik menimbulkan medan magnet pada lilitan dan logam piringan yang memotong medan magnet tersebut akan menimbulkan arus eddy pada piringan itu sendiri.
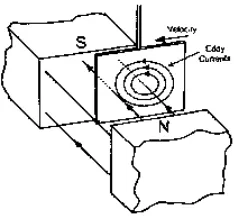
Kemudian arus eddy ini akan menimbulkan medan magnet yang arahnya berlawanan dengan medan magnet sebelumnya, sehingga menghambat gerakan putar dari poros tersebut. Rem elektromagnetik akan optimal untuk memberikan penurunan kecepatan, bukan untuk menghentikan gerak suatu objek. Oleh karena itu, rem ini sering diaplikasikan untuk sistem pengereman pada kereta api, dan juga digunakan pada alat dinamometer untuk pengukuran torsi suatu mesin. Komponen dasar dari rem elektromagnetik ditunjukkan oleh Gambar 2.7. Arus eddy yang melingkar menyebabkan medan magnet induksi melawan arah medan magnet mula-mula. Hal ini menyebabkan terjadinya gaya pengeraman yang melawan arah kecepatan konduktor yang bergerak memotong medan magnet dari kedua solenoid.
Dan untuk gaya pengereman yang dihasilkan oleh arus eddy yang melingkar ditunjukkan pada Gambar 2.8, di mana terdapat medan magnet yang arahnya menjauhi pengamat. Kemudian sebuah konduktor memotong medan magnet tersebut dengan kecepatan tertentu. Berdasarkan hukum Faraday, apabila terjadi perubahan medan magnet, maka akan timbul GGL pada konduktor. Pada konduktor, bidang yang akan mengalami perubahan fluks magnet hanya pada kedua sisinya, yang Gambar 2.7 Rem Elektromagnetik
pertama adalah saat keluar dari medan magnet dan yang kedua adalah saat memasuki medan magnet. Di sisi lain, bagian tengah konduktor tidak mengalami perubahan fluks magnet sehingga tidak timbul lagi. Dengan artian, gaya lawan hanya dihasilkan apabila permukaan tersebut memiliki kecepatan. Semakin tinggi kecepatan maka gaya lawan yang dihasilkan juga semakin besar. Tetapi semakin rendah kecepatan, maka gaya lawan akan semakin kecil.
2.2.4. Gear [8]
Pada umumnya sering kali kita menginginkan adanya perubahan kecepatan sudut atau torsi, baik itu memperbesar ataupun memperkecil nilai kecepatan sudut atau torsi tersebut. Dengan menggunakan rangkaian gear, maka hal tersebut dapat dilakukan. Gear merupakan suatu lingkaran Gambar 2.8 Gaya Pengereman oleh Arus Eddy
Gambar 2.9 Bentuk Fisik Gear
dengan gerigi di lingkaran luarnya. Bentuk fisik gear dapat dilihat pada Gambar 2.9.
Dengan konfigurasi dua buah gear seperti ini, maka aturan yang berlaku adalah sebagai berikut:
𝑉𝑉𝑎𝑎=𝑉𝑉𝑏𝑏 (2.2)
Untuk aturan gaya yang bekerja pada gear adalah sebagai berikut:
𝜔𝜔𝑏𝑏 = Kecepatan sudut pada gear B
𝑅𝑅𝑎𝑎 = Jari-jari pada gear A
𝑅𝑅𝑏𝑏 = Jari-jari pada gear B
𝐹𝐹𝑎𝑎 = Gaya yang bekerja pada gear A
𝐹𝐹𝑏𝑏 = Gaya yang bekerja pada gear B
𝜏𝜏𝑎𝑎 = Torsi pada gear A
𝜏𝜏𝑏𝑏 = Torsi pada gear B
Untuk konfigurasi dari dua buah gear ini ditunjukan dengan Gambar 2.10. Kedua buah poros gear ini dihubungkan dengan menggunakan chain (belt).
2.2.5. Rotary Encoder [9]
Rotary encoder merupakan salah satu jenis sensor kecepatan yang umum digunakan. Dan rotary encoder sendiri terdiri dari dua bagian utama yaitu optocoupler dan sebuah piringan pencacah tipis. Kemudian pada optocoupler terdapat photo-transistor dan LED.
Cara kerja dari sensor ini yaitu, ketika cahaya LED menembus lubang pada piringan, maka photo-transistor akan mengalami saturasi dan Gambar 2.10 Konfigurasi Gear Dua Poros
akan menghasilkan suatu pulsa gelombang persegi. Gambar 2.11 menunjukkan bentuk fisik dari rotary encoder yang berupa bagian optocoupler dan piringan pencacah. Semakin banyak deretan pulsa yang dihasilkan pada satu putaran maka dapat menentukan akurasi rotary encoder tersebut. Sehingga semakin banyak jumlah lubang yang dapat dibuat pada piringan maka akurasi dari rotary encoder akan semakin baik.
2.3.
Arduino Uno R3 [10]
Arduino Uno merupakan sebuah board mikrokontroler berbasis ATMega 328. Arduino Uno memiliki 14 pin digital input / output (dengan 6 pin dapat digunakan sebagai output PWM), 6 analog input, 16 MHz ceramic resonantor, konektor USB, jack power, ICSP header, dan tombol reset. Arduino Uno berisi semua yang dibutuhkan untuk mendukung kerja dari mikrokontroler, dapat terhubung ke komputer dengan kabel USB atau menggunakan sumber dari AC de DC adapter. Pada Gambar 2.12 ditunjukkan bentuk fisik dari Arduino Uno R3.
Untuk Arduino Uno R3 ini merupakan seri dari Arduino Uno revisi ketiga dengan memiliki fitur-fitur baru sebagai berikut:
a. Pin out menambahkan pin SDA dan SCL yang dekat dengan pin AREF dan dua pin baru lainnya ditempatkan dekat dengan pin RESET, IOREF memungkinkan untuk berdaptasi dengan tegangan yang disediakan dari papan. Untuk kedepannya, shield akan kompatibel baik dengan papan yang menggunakan AVR yang beroperasi dengan 5V.
b. Sirkuit RESET yang lebih memadai. c. Atmega 16U2 mengganti 8U2. Gambar 2.12 Board Arduino Uno R3
Kemudian untuk spesifikasi dari Arduino Uno ditunjukkan Tabel 2.2.
Tabel 2.2 Spesifikasi board Arduino Uno
Spesifikasi Keterangan Mikrokontroler ATMega 328 Tegangan Operasi 5 V 5 V
Tegangan Masukan (rekomendasi) 7 – 12 V Tegangan Masukan (batas) 6 – 20 V
Pin I/O Digital 14 (6 diantaranya bisa digunakan untuk output PWM )
Pin Analog Input 6 Arus DC setiap pin I/O 40 mA
Flash Memory 32 KB (ATmega 328) dengan 0.5 KB digunakan untuk bootloader
SRAM 2 KB (ATmega 328)
EEPROM 1 KB (Atmega 328) 1 KB (ATmega 328) Kecepatan Clok 16 MHz
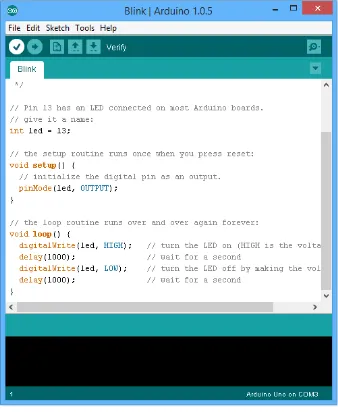
Arduino Uno memiliki beberapa fasilitas untuk berhubungan dengan komputer, Arduino lainnya, dan mikrokontroler lainnya. ATMega 328 menyediakan UART TTL (5V) komunikasi serial, dengan tersedianya pin digital 0 (RX) dan 1 (TX). Komunikasi serial melalui USB akan menghasilkan virtual com port pada software di komputer. Pada softwarei Arduino termasuk monitor yang terdiri dari data sederhana untuk dikirum maupun diterima oleh board Arduino. LED RX dan TX pada board akan menyala ketika data dikirimkan melalui chip USB to Serial dan koneksi USB ke komputer.
Kemudian arduino dapat diprogram dengan menggunakan software processing dalam menuliskan program kedalam arduino. Processing sendiri merupakan penggabungan antara C++ dan Java. Software arduino ini dapat di-install pada berbagai operating system (OS) seperti: LINUX, Mac OS, dan Windows. Software IDE arduino terdiri dari tiga bagian, yaitu editor program, compiler, dan uploader. Struktur perintah pada arduino sendiri terdiri dari dua bagian yaitu void setup dan void loop. Void setup berisi perintah yang akan dieksekusi hanya satu kali sejak arduino dihidupkan sedangkan void loop berisi perintah yang akan
dieksekusi berulang-ulang selama dihidupkan. Untuk tampilan framework dari Arduino Uno dapat dilihat pada Gambar 2.13.
2.4.
Identifikasi Sistem
Untuk mendapatkan parameter-parameter dari suatu plant maka dilakukan suatu langkah yang dinamakan dengan identifikasi sistem. Dan parameter-parameter plant tersebut diperoleh berdasarkan data hasil pengukuran. Identifikasi sistem ini juga dibutuhkan guna memodelkan sistem, karena sebagian besar kontroler berbasis model (model based controller) dengan setiap tahap perancangannya dibutuhkan model matematis dari plant. Sehingga parameter-parameter yang telah diperoleh tadi dapat digunakan dalam menyusun sebuah model matematis dari suatu plant. Pada Tugas Akhir ini identifikasi sistem dilakukan dengan menggunakan Metode Strejc untuk plant ICE 2 langkah dan identifikasi fisik untuk plant motor DC.
2.4.1. Metode Identifikasi Fisik [11]
Memperoleh model matematis dari sebuah plant dengan identifikasi fisik dapat dilakukan dengan dua cara, yaitu melalui Gambar 2.13 Tampilan Framework Arduino
pendekatan analisis dan eksperimen. Pada Tugas akhir ini digunakan pendekatan analisis di mana sistem yang sesungguhnya diwakili oleh sebuah gabungan elemen-elemen pembentuk yang dianggap ideal. Cara untuk memperoleh model sistem tersebut adalah dengan mengggunakan persamaan-persamaan hukum fisika (seperti: Kirchhoff, Newton,dll) dan komponen yang terpasang dalam sistem fisik (seperti : resistor, kapasitor, dll). Karena penggunaan dari model matematis yang sesuai sangat penting terhadap keseluruhan analisis dari sistem yang diuji.
Motor DC dengan konfigurasi paralel memiliki karakteristik nonlinear terhadap arus jangkar (𝐼𝐼𝑎𝑎), arus medan �𝐼𝐼𝑓𝑓�, dan torsi motor (𝜏𝜏𝑇𝑇) yang dihasilkan. Untuk konfigurasi motor DC secara fisik dapat dilihat pada Gambar 2.14. Dari konfigurasi tersebut nantinya dapat diperoleh persamaan matematika yang digunakan untuk pemodelan motor DC. Selanjutnya dari persamaan matematika yang diperoleh, dapat direpresentasikan kedalam diagram blok pada Gambar 2.15.
Gambar 2.15 Diagram Blok Motor DC Paralel Gambar 2.14 Konfigurasi Fisik Motor DC Paralel
2.4.2. Metode Idetifikasi Strej [12]
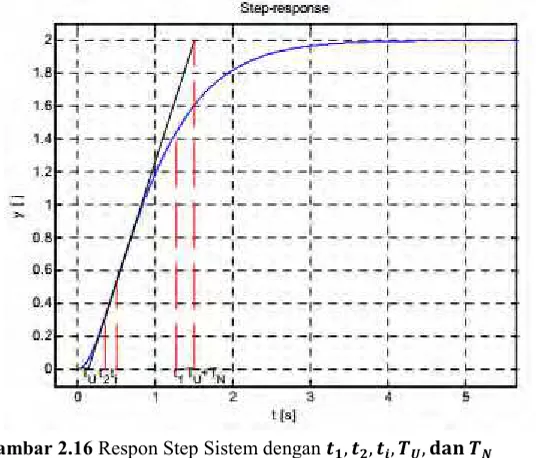
Untuk metode Strejc dilakukan pendekatan pada sistem yang tidak stabil atau nonlinear. Dengan tanpa ada waktu tunda, maka untuk perhitungan waktu 𝑇𝑇𝑈𝑈 dan 𝑇𝑇𝑁𝑁 dapat dengan membuat garis singgung yang memotong atau bersinggungan dengan respon sistem. Pada Gambar 2.16 ditunjukkan grafik dari respon sistem yang dihasilkan. Digunakan 𝜏𝜏 (Persamaan (2.8)) sebagai parameter dari perbandingan waktu.
𝜏𝜏=𝑇𝑇𝑈𝑈
𝑇𝑇𝑁𝑁 (2.8)
Untuk nilai 𝜏𝜏 yang diperoleh, perkiraan pendekatan dari pemodelan sistem dapat ditentukan melalaui aturan sebagai berikut:
a. Jika nilai dari 𝜏𝜏< 0, maka pada sistem dapat dilakukan pendekatan model orde ke-2 seperti yang ditunjukkan pada Persamaan (2.9).
Gambar 2.16 Respon Step Sistem dengan 𝒕𝒕𝟏𝟏,𝒕𝒕𝟐𝟐,𝒕𝒕𝒊𝒊,𝑻𝑻𝑼𝑼,𝐝𝐝𝐝𝐝𝐝𝐝𝑻𝑻𝑵𝑵
𝐺𝐺𝑆𝑆𝑇𝑇1(𝑠𝑠) =
• Memperoleh parameter 𝑡𝑡1 dengan mencari waktu pada saat respon sistem mencapai 72% dari 𝑦𝑦𝑠𝑠𝑠𝑠 (Gambar 2.16),
• Menentukan parameter 𝑡𝑡2 dari Persamaan (2.11).
𝑡𝑡2= 0,3574�𝜏𝜏𝑆𝑆𝑇𝑇1+𝜏𝜏𝑆𝑆𝑇𝑇2� (2.11) • Mendapatkan nilai dari 𝑦𝑦(𝑡𝑡2) dari respon sistem menurut
Tabel 2.3 serta menentukan rasio 𝑇𝑇 dari Persamaan (2.12).
𝑇𝑇=𝜏𝜏𝑆𝑆𝑇𝑇1
𝜏𝜏𝑆𝑆𝑇𝑇2 (2.12)
• Menentukan nilai dari 𝜏𝜏𝑆𝑆𝑇𝑇1dan 𝜏𝜏𝑆𝑆𝑇𝑇2dengan menggunakan Persamaan (2.11) dan Persamaan (2.12). Pada Tabel 2.3 ditampilkan nilai untuk hasil dari rasio 𝑇𝑇.
Tabel 2.3 Nilai Konstan Rasio T
b. Jika nilai dari 𝜏𝜏 ≥0, maka pada sistem dapat dilakukan pendekatan model orde ke-n seperti yang ditunjukkan pada Persamaan (2.13).
𝐺𝐺𝑆𝑆𝑇𝑇2(𝑠𝑠) = 𝐾𝐾
(𝜏𝜏𝑆𝑆𝑇𝑇𝑠𝑠+ 1)𝑖𝑖 (2.13) dengan nilai 𝜏𝜏𝑆𝑆𝑇𝑇 dapat ditentukan dengan cara berikut:
•
Menentukan rasio 𝜏𝜏 seperti pada Persamaan (2.8).•
Berdasarkan pada nilai 𝜏𝜏, dapat diperoleh orde dari pendekatan model yang tepat dan koordinat titik 𝑦𝑦𝑖𝑖, yang merupakan titik singgung antara respon sistem dengan garis singgung yang tepat berdasar Tabel 2.4.•
Berdasarkan koordinat 𝑦𝑦𝑖𝑖 yang telah diperoleh, selanjutnya mendapatkan 𝑡𝑡𝑖𝑖 yang merupakan waktu saat respon sistem mencapai 𝑦𝑦𝑖𝑖 (ditunjukkan pada Gambar 2.16).•
Menentukan waktu konstan 𝜏𝜏𝑆𝑆𝑇𝑇 menurut Persamaan (2.14).𝜏𝜏𝑆𝑆𝑇𝑇 =𝑛𝑛 −𝑡𝑡𝑖𝑖1
(2.14)
Tabel 2.4 Taksiran dari Orde ke-n dan Dan Nilai Titik Singgung
𝒏𝒏 𝝉𝝉 𝒚𝒚𝒊𝒊
2.4.3. Root Mean Square Error (RMSE) [13]
RMSE sering digunakan sebagai parameter penting yang menunjukkan akurasi dari suatu analisis. RMSE merupakan komponen yang diperlukan dalam pemodelan statistik (seperti : regresi). RMSE telah banyak digunakan sebagai cara untuk mengevaluasi error berdasarkan regresi dan metode statistik perhitungan RMSE ditunjukkan oleh
Persamaan (2.15) dan Persamaan (2.16) menunjukkan formulasi dari nilai error dalam bentuk persentase.
𝑅𝑅𝑅𝑅𝑅𝑅𝐸𝐸=�1
A : Nilai data hasil pengukuran M : Nilai data hasil pemodelan
2.5.
Kontroler PID [13]
Salah satu jenis kontroler yang berdasarkan aksi kontrolnya adalah kontroler proporsiona ditambah integral ditambah differensial. Yang merupakan kontroler penggabungan dari ketiga sistem kontrol proporsional, integral, dan differensial. Sama dengan jenis kontroler yang telah dibahas sebelumnya, untuk masukan pada kontroler PID berupa sinyal kesalahan e(t) dan keluaran kontroler adalah sinyal kontrol u(t). Sedangkan hubungan antara masukan kontroler e(t) dan keluaran kontroler u(t) ditulis dalam Persamaan (2.17).
𝑢𝑢(𝑡𝑡) = 𝐾𝐾𝑝𝑝�𝑖𝑖(𝑡𝑡) +1
Jika dalam persamaan Laplace Persamaan (2.18) menjadi:
𝑈𝑈(𝑠𝑠) =𝐾𝐾𝑝𝑝�1 + 1
𝜏𝜏𝑖𝑖𝑠𝑠+𝜏𝜏𝑑𝑑𝑠𝑠� 𝐸𝐸(𝑠𝑠) (2.18)
Dengan 𝐾𝐾𝑝𝑝 adalah penguatan proporsional dan 𝜏𝜏𝑖𝑖 adalah waktu integral dan 𝜏𝜏𝑑𝑑 adalah waktu differensial. Dan parameter dari ketiganya dapat
ditentukan. Sehingga untuk fungsi alih kontroler PID ditunjukkan oleh Persamaan (2.19).
𝑈𝑈(𝑠𝑠)
𝐸𝐸(𝑠𝑠)=𝐾𝐾𝑝𝑝�1 + 1
𝜏𝜏𝑖𝑖𝑠𝑠+𝜏𝜏𝑑𝑑𝑠𝑠� (2.19) Diagram blok sistem kontrol PID ditunjukkan pada Gambar 2.17.
Untuk tipe kontroler proporsional Kp akan memberikan efek mengurangi waktu naik tetapi tidak menghapus kesalahan keadaan tunak. Kontroler integral akan memberikan efek menghilangkan error steady state tetapi berakibat menurunnya respon transient. Sedangkan kontroler derivative Kd akan memberikan efek meningkatnya stabilitas sistem dan mengurangi overshoot. Efek dari setiap kontroler dalam sistem closed loop dapat dilihat pada Tabel 2.5.
Tabel 2.5 Efek Tiap Parameter Respon
Closed Loop Rise Time Overshoot Setting Time Error Steady State Kp Naik Meningkat Perubahan
kecil Menurun Ki Menurun Meningkat Meningkat Hilang Kd Perubahan
kecil Menurun Menurun Perubahan kecil
2.6.
Particle Swarm Optimiation
(PSO) [14] [15]
Particle Swarm Optimization, yang disingkat sebagai PSO didasarkan pada perilaku sebuah kawanan serangga, seperti semut, rayap, Gambar 2.17 Diagram Blok PID
lebah atau burung. Algoritma PSO sendiri meniru perilaku sosial organisme ini. Perilaku sosial terdiri dari tindakan individu dan pengaruh dari individu-individu lain dalam suatu kelompok. Kata partikel menunjukkan, misalnya seekor burung dalam kawanan burung. Setiap individu atau partikel berperilaku secara terdistribusi dengan cara menggunakan kecerdasannya (intelligence) sendiri dan juga dipengaruhi perilaku kelompok kolektifnya. Dengan demikian, jika satu partikel atau seekor burung menemukan jalan yang tepat atau pendek menuju ke sumber makanan, sisa kelompok yang lain juga akan dapat segera mengikuti jalan tersebut meskipun lokasi mereka jauh dalam kelompok tersebut.
Dalam PSO, kawanan diasumsikan mempunyai ukuran tertentu atau tetap dengan setiap partikel posisi awalna terletak di suatu lokasi yang acak dalam ruang multidimensi. Setiap partikel bergerak dalam ruang atau space tertentu dan mengingat posisi terbaik yang pernah dilalui atau ditemukan terhadap sumber makanan atau nilai fungsi objektif. Setiap partikel menyampaikan informasi atau posisi bagusnya kepada partikel yang lain dan menyesuaikan posisi dan kecepatan masing-masing berdasarkan informasi yang diterima mengenai posisi yang bagus tersebut. Sebagai contoh, misalnya perilaku burung-burung dalam kawanan burung. Meskipun setiap burung memiliki ketebatasan dalam hal kecerdasan, biasanya seekor burung akan mengikuti kebiasaan (rule) seperti berikut:
• Posisi seekor burung tidak berada terlalu dekat dengan burung yang lain.
• Burung tersebut akan mengarahkan terbangnya ke arah rata-rata ke seluruhan burung.
• Akan memposisikan diri dengan rata-rata posisi burung yang lain dengan menjaga sehingga jarak antar burung dalam kawanan itu tidak terlalu jauh.
Dengan demikian perilaku kawanan burung akan didasarkan pada kombinasi dari 3 faktor simpel berikut:
• Kohesi : terbang bersama
• Separasi : jarak jangan terlalu dekat • Penyesuaian : mengikuti arah bersama
Jadi PSO sendiri dikembangkan berdasarkan pada model berikut: • Ketika seekor burung mendekati target atau makanan (atau bisa
minimum atau maksimum suatu fungsi tujuan) secara cepat
mengirim informasi kepada burung-burung yang lain dalam kawanan tertentu.
• Burung yang lain akan mengikuti arah menuju ke makanan tetapi tidak secara langsung.
• Ada komponen yang tergantung pada pikiran setiap burung, yaitu memorinya tentang apa yang sudah dilewati pada waktu sebelumnya.
Pada algrotima PSO ini, pencarian solusi dilakukan oleh suatu populasi yang disebut sebagai kawanan, dengan kawanan yang terdiri dari beberapa individu yang biasa disebut sebagai partikel. Populasi dibangkitkan secara acak dengan batasan nilai terkecil dan terbesar. Setiap partikel merepresentasikan posisi atau solusi dari permasalahan yang dihadapi. Setiap partikel melakukan pencarian solusi yang optimal dengan melintasi ruang pencarian (search space). Hal ini dilakukan dengan cara setiap partikel melakukan penyesuaian terhadap posisi terbaik dari partikel tersebut (local best) dan penyesuaian terhadap posisi partikel terbaik dari seluruh kawanan (global best) selama melintasi ruang pencarian. Jadi, penyebaran pengalaman atau informasi terjadi di dalam partikel itu sendri dan antara suatu partikel dengan partikel terbaik dari seluruh kawanan selama proses pencarian solusi.
Setelah itu, dilakukan proses pencarian untuk mencari posisi terbaik setiap partikel dalam sejumlah iterasi tertenttu sampai diperoleh posisi yang relatif steady atau mencapai batas iterasi yang telah ditetapkan. Pada setiap iterasi, setiap solusi yang direpresentasikan oleh posisi partikel, dievaluasi performansinya dengan cara memasukkan solusi tersebut kedalam fitness function. Setiap partikel diperlakukan seperti sebuah titik pada suatu dimensi ruang tertentu. Kemdian terdapat dua faktor yang memberikan karakter terhadap status partikel pada ruang pencarian yaitu posisi partikel dan kecepatan partikel. Algortima PSO orisinil dijelaskan dalam persamaan berikut:
𝑖𝑖= 1, 2, … ,𝑛𝑛
𝑐𝑐1,𝑐𝑐2 : konstanta akselerasi (learning rate)
𝑖𝑖1,𝑖𝑖2 : bilangan random (0 – 1)
𝑥𝑥𝑖𝑖,𝑚𝑚
(𝑡𝑡) : posisi saat ini dari partikel ke-i pada iterasi ke t
𝑝𝑝𝑝𝑝𝑖𝑖𝑠𝑠𝑡𝑡𝑖𝑖 : posisi terbaik sebelumnya dari partikel ke-i
𝑔𝑔𝑝𝑝𝑖𝑖𝑠𝑠𝑡𝑡 : partikel terbaik diantara semua partikel dalam satu kelompook atau populasi
Persamaan dari PSO sendiri memiliki 3 bagian antara lain bagian pertama yang disebut dengan momentum part, pada bagian ini partikel tidak dapat berubah secara bebas melainkan mengalami perubahan melalui keceaptan sekarang. Pada bagian kedua yaitu cognitive part, merupakan bagian pengalaman partikel, belajar dari pengalaman partikel itu sendiri. Dan pada bagian ketiga adalah social part, merupakan kerja sama antar partikel, belajar dari pengalaman partikel-partikel lain.
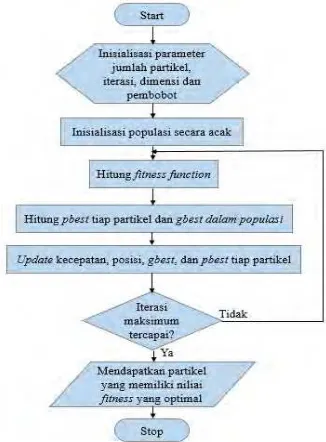
Kemudian untuk mekanisme dari PSO adalah sebagai berikut: 1. Menentukan parameter awal, yang meliputi jumlah partikel,
jumlah iterasi, dimensi dan pembobot. 2. Membangkitkan populasi awal secara acak. 3. Mengevaluasi fungsi fitness.
4. Hasil dari fitness kita evaluasi dengan cara membandingkan nilai fitness dengan pbest. Apabila nilai sekarang lebih baik dari pbest, maka set nilai pbest sama dengan nilai sekarang dan 𝑝𝑝𝑝𝑝𝑖𝑖𝑠𝑠𝑡𝑡𝑖𝑖,𝑚𝑚(𝑡𝑡) sama dengan nilai posisi sekarang pada dimensi m.
5. Mengidentifikasi partikel-partikel lain yang memiliki pbest, jika niali pbest lebih besar dari gbest, maka set gbest sama dengan pbest.
6. Perbarui nilai kecepatan dari posisi suatu partikel.
7. Mengulangi langkah (3) sampai kriteria telah dipenuhi, dengan mempunyai nilai fitness yang optimal atau jumlah iterasi telah tercapai.
Sebelumnya pada Persamaan (2.20), apabila kecepatan partikel melebihi ±vmax maka kecepatan akan menjadi ±vmax. Hal ini untuk membatasi kecepatan partikel yang terlalu tinggi, sehingga dapat menyebabkan osilasi. Untuk diagram alir dari algoritma PSO dapat dilihat pada Gambar 2.18.
2.5 Modifikasi PSO
Dalam penerapannya, ditemukan bahwa kecepatan partikel dalam PSO standard diperbarui terlalu cepat dan nilai minimum fungsi tujuan yang dicari sering terlewati. Oleh karena itu, seiring berjalannya waktu dilakukan modifikasi atau perbaikan terhadap algoritma PSO standard. Perbaikan itu berupa penambahan suatu inertia weighting (𝑤𝑤) untuk mengurangi kecepatan pada formula untuk pembaruan kecepatan. Biasanya w dibuat sedemikian hingga semakin besar iterasi yang dilalui, semakin mengecil kecepatan partikel. Untuk persamaan modifikasi PSO menjadi:
Gambar 2.18 Diagram Alir Algoritma PSO
𝑣𝑣𝑖𝑖(,𝑡𝑡+1𝑚𝑚 )=𝑤𝑤𝑣𝑣𝑖𝑖(,𝑚𝑚𝑡𝑡)+𝑐𝑐1𝑖𝑖1�𝑝𝑝𝑝𝑝𝑖𝑖𝑠𝑠𝑡𝑡𝑖𝑖,𝑚𝑚− 𝑥𝑥𝑖𝑖(,𝑡𝑡𝑚𝑚)� +𝑐𝑐2𝑖𝑖2�𝑔𝑔𝑝𝑝𝑖𝑖𝑠𝑠𝑡𝑡𝑚𝑚− 𝑥𝑥𝑖𝑖(,𝑡𝑡𝑚𝑚)�
(2.22)
dengan w adalah inertia weighting.
Persamaan (2.22) merupakan modifikasi terhadap Persamaan (2.20). Nilai dari bobot inersia yang tinggi menambah porsi pencarian global, sedangkan nilai yang rendah lebih menekankan pencarian lokal. Untuk tidak terlalu menitikberatkan pada salah satu bagian dan tetap mencari area pencarian yang baru dalam ruang berdimensi tertentu, maka perlu dicari nilai bobot inersia (w) yang secara imbang menjaga pencarian global dan lokal. Untuk mencapai itu dan mempercepat konvergensi, suatu bobot inersia yang mengecl nilainya dengan bertambahnya itersai digunakan Persamaan (2.23).
𝑤𝑤=𝑤𝑤𝑚𝑚𝑎𝑎𝑚𝑚− �𝑤𝑤𝑚𝑚𝑎𝑎𝑚𝑚− 𝑤𝑤𝑚𝑚𝑖𝑖𝑖𝑖
𝑖𝑖𝑡𝑡𝑖𝑖𝑖𝑖𝑚𝑚𝑎𝑎𝑚𝑚 � 𝑖𝑖𝑡𝑡𝑖𝑖𝑖𝑖 (2.23) Di mana,
𝑤𝑤𝑚𝑚𝑎𝑎𝑚𝑚 : initial inertia weight
𝑤𝑤𝑚𝑚𝑖𝑖𝑖𝑖 : final inertia weight
𝑖𝑖𝑡𝑡𝑖𝑖𝑖𝑖 : iterasi berjalan
𝑖𝑖𝑡𝑡𝑖𝑖𝑖𝑖𝑚𝑚𝑎𝑎𝑚𝑚 : jumlah iterasi maksimal
BAB 3
PERANCANGAN SISTEM
3.1.
Gambaran Umum Simulator HEV
Pada Tugas Akhir ini simulator HEV yang digunakan tidak sepenuhnya mengalami perombakan yang signifikan. Hal ini dikarenakan simulator HEV masih bekerja dengan baik dan hanya sedikit mengalami penggantian komponen yang sudah tidak berfungsi lagi. Simulator HEV sendiri menggunakan penggerak yang terdiri dari ICE dan motor DC, dengan ICE sebagai penggerak utama dan motor DC digunakan untuk membantu ICE untuk mencapai kecepatan putar yang diinginkan. Selain itu digunakan rem elektromagnetik untuk memberikan efek pembebanan. Oleh karena itu, dapat diketahui fungsi dari motor DC untuk membantu kinerja ICE dalam mencapai kecepatan putara yang diinginkan. Bentuk fisik simulator HEV yang telah dihasilkan pada penelitian sebelumnya ditunjukkan pada Gambar 3.1.
Kontroler yang digunakan dalam pengaturan kecepatan pada simulator HEV ini adalah kontroler tipe Proportional Integral Derivative yang dimaksudkan untuk mengatasi permasalahan regulator dengan tujuan menjaga agar nilai dari kecepatan putar tetap pada nilai yang diinginkan dengan melakukan pemililhan parameter kontroler PID berupa Kp, Ki dan Kd yang tepat. Pengujian dari metode ini dengan diberikan gangguan state berupa beban rem elektromagnetik. Diagram blok dari sistem pengaturan HEV dapat dilihat pada Gambar 3.2.
Gambar 3.1 Bentuk Fisik Simulator HEV
3.2.
Perancangan Perangkat Keras (
Hardware
)
Pada proses perancangan dalam Tugas Akhir ini terlebih dahulu dilakukan pengecekan, penambahan maupun penggantian komponen dari simulator HEV. Perancangan perangkat keras pada simulator HEV ini sendiri secara umum terbgai menjdai dua, yaitu perancangan mekanik dan perancangan elektronik.
3.2.1. Perancangan Mekanik
Konfigurasi sistem untuk simulator HEV sendiri pada dasarnya menggabungkan tenaga penggerak dari ICE dan motor listrik. Kecepatan putar dari ICE jauh lebih tinggi dari pada motor DC, oleh sebab itu digunakan transimisi gear untuk membuat kecepatan putar diantara keduanya seimbang. Dengan adanya transimisi gear ini, kecepatan putar ICE dapat tereduksi secara proporsional agar sesuai dengan range dari motor DC.
Ditambahkan pula beban berupa rem elektromagnetik arus eddy yang ditempatkan pada poros motor DC. Di samping itu, beban rem elektromagnetik ini akan menghasilkan torsi lawan yang akan mengurangi torsi yang dihasilkan oleh ICE dan motor DC. Sehingga akan menghasilkan penurunan kecepatan putar pada simulator HEV. Secara
Gambar 3.2 Diagram Blok Pengaturan Simulator HEV
keseluruhan untuk konfigurasi perangkat keras dari simulator HEV ditunjukkan oleh Gambar 3.3.
3.2.1.1. Internal Combustion Engine (ICE)
Mesin bakar jenis ICE pada simulator HEV berperan sebagai tenaga penggerak utama. Untuk mesin bakar yang digunakan pada simulator HEV ini, dipilih mesin pemotong rumput 2 langkah sebagai penggerak utama. Karena mesin pemotong rumput 2 langkah diasumsikan
Gambar 3.3 Konfigurasi Perangkat Keras Simulator HEV
sebagai ICE pada HEV yang sesungguhnya. transmisi. Bentuk fisik dari mesin pemotong rumput 2 langkah ditunjukkan oleh Gambar 3.4.
Tabel spesifikasi mesin pemotong rumput yang digunakan ditunjukkan pada Tabel 3.1
Tabel 3.1 Spesifikasi ICE
No. Klasifikasi Spesifikasi
1 Tipe 2 langkah
2 Bahan bakar Bensin dan oli ( 25:1 ) 3 Kapasitas silinder 33,8 cc
4 Pemasukan karburator Karburator 5 Sistem starter Recoil Starter 6 Sistem pengapian Electric Ignition 7 Sistem kopling Kering, sentrifugal 8 Kecepatan putar maksimal 8000 rpm
9 Daya keluaran 1,8 HP
3.2.1.2. Motor DC
Pada simulator HEV jenis motor listrik yang digunakan untuk membantu mesin bakar adalah jenis motor DC (Direct Current). Motor DC merupakan motor yang menggunakan sumber arus searah dalam kerjanya dan berfungsi untuk mengubah energi listrik DC menjadi energi gerak. Untuk pemilihan motor DC sendiri dipilih motor DC yang memiliki kecepatan putar maksimum yang lebih rendah dari mesin bakar, hal ini dikarenakan motor DC tersebut hanya digunakan sebagai tenaga pembantu untuk mesin bakar. Bentuk fisik motor DC ditunjukkan pada Gambar 3.5.
Kemudian untuk spesifikasi motor DC yang digunakan dalam Tugas Akhir ini ditunjukkan oleh Tabel 3.2.
Tabel 3.2 Spesifikasi Motor DC
No. Spesifikasi Keterangan
1 Tipe Parallel
2 Kecepatan putar maksimum 2000 rpm 3 Tegangan nominal 150 V 4 Daya keluaran 0,5 HP
3.2.1.3. Rem Elektromagnetik
Pada simulator HEV beban yang digunakan berupa rem elektromagnetik. Hal ini dimaksudkan agar dapat menyerupai kondisi sesungguhnya dari HEV dengan memperhatikan beberapa parameter yang ada. Beban berupa rem elektromagnetik tersebut ditempatkan pada poros motor DC. Untuk rem elektromagnetik yang digunakan terdiri dari 12 kumparan yang disusun secara seri dan sebuah piringan besi. Kemudian piringan besi diletakkan diantara kedua kumparan yang dililit koil yang dapat menghasilkan medan magnet jika dialiri arus listrik.
Ketika kecepatan putar tinggi, prinsip kerja dari rem elektromagnetik adalah dengan adanya medan magnet yang dihasilkan akan menimbulkan arus eddy yang menyebabkan torsi yang berlawann arah dengan arah putar piringan besi. Akibatnya kecepatan putar dari mesin bakar akan menurun dengan adanya efek pembebana tersebut. Bentuk fisik dari rem elektromagnetik ditunjukkan oleh Gambar 3.6.
Digunakan sumber tegangan dari jala-jala PLN 220 V yang dimasukkan pada auto transformator dan ditambahkan dengan full wave rectifier pada keluaran auto transformator. Penggunaan dari auto transformator ini adalah untuk mengatur tegangan yang disuplay pada rem magnet. Semakin besar tegangan yang masuk maka medan magnet yang dihasilkan semakin besar dan meningkatkan efek pengereman.
3.2.1.4. Transmisi Gear sebagai Penyesuai Kecepatan
Berdasarkan speseifikasi yang dimiliki oleh ICE dan motor DC yang digunakan pada simulator HEV, diketahui bahwa kecepatan putar dari ICE lebih besar dibandingkan dengan kecepatan putar motor DC. Sehingga dibutuhkan gear dan timing belt untuk mereduksi kecepatan putar ICE agar sesuai dengan rentang kecepatan dari motor DC.
Perbandingan roda gigi diperlukan sebagai penyesuai rentang kecepatan putar antara keduanya. Dengan range kerja dari ICE sekitar 0-8000 rpm dan motor DC dengan range kerja 0-2000 rpm. Maka dibutuhkan gear dan timing belt untuk menghubungkan ICE dengan motor DC sebagai media untuk menyatukan poros antara keduanya. Karena range dari kecepatan putar keduanya berbeda, maka digunakan perbandingan gear dengan rumus:
𝜔𝜔𝑎𝑎𝑅𝑅𝑎𝑎=𝜔𝜔𝑏𝑏𝑅𝑅𝑏𝑏 (3.1)
Karena secara fisik perbandingan gear 1:4 memerlukan tempat yang lebih, maka perlu dilakukan penambahan gear diantara keduanya
untuk efisiensi tempat . Sehingga konfigurasinya seperti yang ditunjukkan oleh Gambar 3.7, menjadi gear pada poros mesin bakar digandeng dengan gear 1 poros tengah dengan perbandingan 𝑅𝑅𝑏𝑏:𝑅𝑅𝑐𝑐 = 1: 2. Gear 1 dan gear 2 berada di poros yang sama, yaitu pada poros tengah dengan perbandingan 𝑅𝑅𝑐𝑐1:𝑅𝑅𝑐𝑐2= 2: 1. Di sisi lain, gear 2 poros tengah digandeng dengan gear poros motor DC dengan perbandingan 𝑅𝑅𝑐𝑐2:𝑅𝑅𝑎𝑎= 1: 2.
dengan,
𝜔𝜔𝑐𝑐1
= kecepatan putar poros tengah 1
𝜔𝜔
𝑐𝑐2= kecepatan putar poros tengah 2
𝑅𝑅𝑐𝑐1 = jari – jari gear pada poros tengah 1𝑅𝑅𝑐𝑐2 = jari – jari gear pada poros tengah 2
𝑅𝑅𝑎𝑎 = jari – jari gear pada poros motor DC
𝑅𝑅𝑏𝑏 = jari – jari gear pada poros mesin bakar
Sesuai dengan persamaan:
𝜔𝜔𝑏𝑏𝑅𝑅𝑏𝑏= 𝜔𝜔𝑐𝑐1𝑅𝑅𝑐𝑐1 (3.2)
𝜔𝜔𝑐𝑐1=𝜔𝜔𝑐𝑐2
𝜔𝜔𝑎𝑎𝑅𝑅𝑎𝑎=𝜔𝜔𝑐𝑐2𝑅𝑅𝑐𝑐2 (3.3)
Maka diperoleh: 𝜔𝜔𝑎𝑎𝑅𝑅𝑎𝑎
𝑅𝑅𝑐𝑐2 =𝜔𝜔𝑐𝑐2 (3.4)
Gambar 3.7 Konfigurasi Gear pada Simulator HEV
𝜔𝜔𝑏𝑏𝑅𝑅𝑏𝑏
Dari penggunaan gear ini selain berpengaruh pada kecepatan putar kedua mesin juga berpengaruh pada torsi yang dihasilkan kedua mesin. Hal ini dapat terlihat dari Persamaan (3.7).
𝜏𝜏𝑎𝑎 memiliki torsi sebesar empat kali torsi yang dihasilkan oleh ICE.
3.2.1.5. Pedal gas
Untuk masukan yang digunakan oleh ICE pada simulator HEV yaitu berupa pijakan pedal gas. Kemudian pedal gas ini terhubung langsung dengan throttle ICE menggunakan kawat olor gas. Oleh karena itu dibutuhkan sebuah sensor untuk mengetahui seberapa besar bukaan throttle pada ICE. Potensiometer dipilih sebagai sensor posisi dalam mengetahui perbandingan perubahan sudut pedal gas dengan bukaan
throttle ICE. Di sisi lain, dengan adanya potensiometer, maka dapat direpresentasikan untuk perubahan nilai resistansi pada potensiometer berbanding lurus dengan bukaan throttle dalam presentase.
Hubungan antara nilai resistansi pada potensiometer dengan presentase bukaan throttle dapat dilihat pada Persamaan (3.9).
𝑓𝑓(𝑥𝑥) =100𝑥𝑥 −1010
−8,17 (3.9)
dengan,
𝑓𝑓(𝑥𝑥) = presentase bukaan throttle 𝑥𝑥 = resistansi dari potensiometer
Berikut ini merupakan bentuk fisik dari pedal gas (ditunjukkan oleh Gambar 3.8) yang digunakan pada simulator HEV dengan dilengkapi potensiomer.
3.2.2. Perancangan Elektronik
Perancangan perangkat keras yang selanjutnya yaitu meliputi perancangan elektronik. Dalam perancangan elektronik terdapat pembaruan desain rangkaian berupa desain rangkaian elektronik untuk rangkaian pembacaan sensor. Selebihnya untuk rangkaian penyearah gelombang penuh masih menggunakan rangkaian yang terdahulu.
Pada motor DC diperlukan suplai masukan berupa tegangan DC dengan tegangan maksimal 190 V. Masukan tegangan ini diperlukan Gambar 3.8 Pedal Gas pada Simulator HEV