BAB II
LANDASAN TEORI
2.1Tinjauan Pustaka
Flowmeter adalah alat yang digunakan untuk mengukur massa atau laju aliran volumetrik cairan atau gas. Sebelum menetapkan flowmeter, juga dianjurkan untuk menentukan apakah aliran informasi akan lebih berguna jika disajikan dalam unit massa atau volumetrik. Ketika mengukur aliran bahan yang mempunyai tekanan, aliran volumetrik tidak terlalu berarti, kecuali kepadatan adalah konstan. Ketika kecepatan (volumetric aliran) dari cairan mampat diukur, faktor gelembung udara akan menyebabkan kesalahan, karena itu, udara dan gas harus dipindahkan sebelum mencapai fluida meter. (Noor Yudha Priyantini, 2010).
adalah volume fluida ( m3 ) yang mengalir melewati suatu penampang dalam selang waktu tertentu. Dirumuskan dengan persamaan berikut:
Q = V/ t. ………..(2.1) Keterangan : Q = debit ( m3 / s )
V = volume fluida ( m3 ) t = waktu fluida mengalir (s) (Fathor Rohman, 2009)
Sistem kontrol fluida adalah sebuah alat yang dapat mengatur jumlah debit air yang akan dikeluarkan. Dengan sistem digital, sistem kontrol ini dirancang untuk mempermudah dalam pengemasan atau penakaran cairan dengan batas keluaran yang ditentukan. Rancangan alat ini berupa perangkat keras dimana perangkat yang satu dengan yang lainya berhubungan dan saling mendukung, adapun perangkat keras tersebut terdiri dari Mikrokontroler, piringan derajat, optocoupler, water meter termodivikasi, solenoid, pompa air dan LCD karakter. Sedangkan perangkat lunaknya berupa program pada mikrokontroler dengan menggunakan bahasa pemrograman assembly sehingga dapat mengontrol perangkat tersebut baik berupa input maupun output.
2.2Landasan Teori
2.2.1 Pengertian Mikrokontroller
sebagai single chip mikrokomputer. Tidak seperti sistem komputer yang mampu menangani berbagai macam program aplikasi, mikrokontroller hanya dapat digunakan untuk suatu aplikasi saja. Perbedaan lainya yaitu pada perbandingan RAM (Rendom Acces Memory) dan ROM (Read Only Memory). Pada Mikrokontroller perbandingan antara RAM dan ROM-nya besar, sedangkan pada sistem komputer juga besar. (Budiharto, Widodo, Perancangan sistem dan aplikasi mikrokontroller, 2005 hal 5).
2.2.2 Arsitektur Mikrokontroler AT89S51
Mikrokontroler AT89S51 merupakan salah satu keluarga dari MCS-51 keluaran ATMEL. Jenis mikrokontroler ini pada prinsipnya dapat digunakan untuk mengolah data per bit ataupun data 8 bit secara bersamaan.
Fasilitas yang dimiliki oleh mikrokontroler AT89S51 adalah sebagai berikut:
1. Kompatibel dengan produk MCS-51
2. 4 Kb In System Programmable Flash Memory, dapat dilakukan pemrograman 1000 tulis dan hapus
3. Range catu daya 4,0V s/d 5,0V 4. Operasi statis: 0 Hz s/d 33 MHz 5. Tiga Tingkat Program memory lock 6. 128 x 8 bit RAM internal
7. 32 Programmable Jalur I/O 8. Dua 16 bit Timer/ Counter 9. Enam Sumber Interupsi 10.Full Duplex Serial Channel
11.Low Power Idle dan Mode Power Down 12.Watcht Dog Timer
13.Dula Data Pointer 14.Power Off Flag
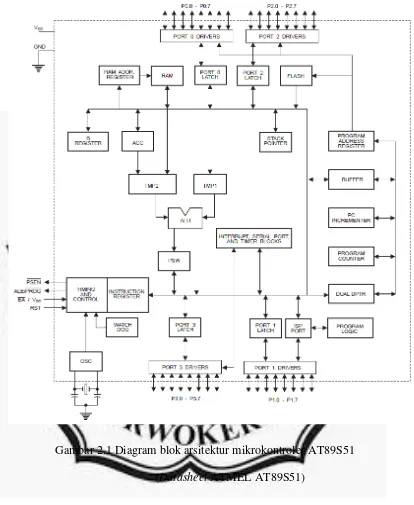
Gambar 2.1 Diagram blok arsitektur mikrokontroler AT89S51 (Datasheet ATMEL AT89S51)
instruksi dan pin keluaran. Flash yang berada didalam chip memungkinkan memori program untuk diprogram ulang pada saat chip didalam sistem atau dengan menggunakan programmer memori nonvolatile konvensional. Dengan mengkombinasikan CPU 8 bit yang serbaguna dengan flash ISP pada chip, ATMEL 89S51 merupakan mikrokontroller yang luar biasa yang memberikan fleksibilitas yang tinggi dan penyelesaian biaya yang efektif untuk beberapa aplikasi kontrol.
Gambar 2.2 Diagram pin mikrokontroler AT89S51 (Datasheet ATMEL AT89S51)
Berdasarkan jumlah pin, mikrokontroler AT89S51 mempunyai jumlah pin sebanyak 40 pin. Adapun fungsi – fungsi dari masing – masing pin adalah sebagai berikut:
a) Vcc
Digunakan sebagai tegangan masukan dari catu daya sebesar + 5V DC. b) GND
Digunakan sebagai ground. c) Port 0
pada pin 32. Selain sebagai masukan atau keluaran, port 0 juga berfungsi sebagai:
1) Multipleks antara byte alamat rendah (A0 s/d A7) dan data (D0 s/d D7) pada saat mengakses memori program eksternal atau memori data eksternal. Pada fungsi ini, port 0 membutuhkan resistor pullup.
2) Masukan byte kode program selama pemrograman flash memori (memori internal atau onchip) dan keluaran saat verifikasi. Resistor pullup dibutuhkan pada saat verifikasi. d) Port 1
Merupakan port paralel 8 bit dua arah. Berfungsi sebagai masukan dan keluaran. Port 1 sudah dipasang resistor pullup secara internal. Jika logika 1 dituliskan pada port 1 maka keluaran akan berlogika 1 dan dapat digunakan sebagai masukan. Posisi SLB terletak pada pin 1 dan MSB terletak pada pin 8.
e) Port 2
Merupakan port paralel 8 bit dua arah. Berfungsi sebagai masukan dan keluaran. Port ini mengirim byte alamat bila dilakukan pengaksesan memori eksternal. LSB terletak pada pin 21 dan MSB terletak pada pin 28. Fungsi lain dari port 2 adalah:
2) Sebagai byte alamat atas (A8 s/d A12) dan kendali saat pemrograman memori flash internal dan verifikasi.
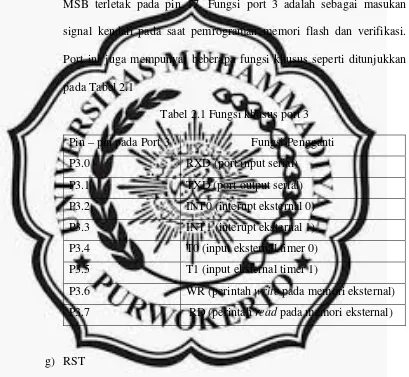
f) Port 3
Merupakan port paralel 8 bit dua arah. LSB terletak pada pin 10 dan MSB terletak pada pin 17. Fungsi port 3 adalah sebagai masukan signal kendali pada saat pemrograman memori flash dan verifikasi. Port ini juga mempunyai beberapa fungsi khusus seperti ditunjukkan pada Tabel 2.1
Tabel 2.1 Fungsi khusus port 3 Pin – pin pada Port 3 Fungsi Pengganti P3.0 RXD (port input serial)
P3.1 TXD (port output serial) P3.2 INT0 (interupt eksternal 0) P3.3 INT1 (interupt eksternal 1) P3.4 T0 (input eksternal timer 0) P3.5 T1 (input eksternal timer 1)
P3.6 WR (perintah write pada memori eksternal) P3.7 RD (perintah read pada memori eksternal)
g) RST
Berfungsi sebagai masukan reset. Pada kondisi high akan aktif selama dua siklus.
h) ALE/PROG
program eksternal. Pin ini juga digunakan untuk memberikan pulsa pemrograman memori flash internal. Dalam keadaan normal, ALE mengeluarkan pulsa dengan frekuensi konstan 1/6 frekuensi osilator. Sehingga dapat digunakan untuk tujuan pewaktuan eksternal.
i) PSEN (Program Store Enable)
Merupakan strobe pembacaan ke memori eksternal. j) EA/Vpp
External Access Enable (EA) digunakan sebagai masukan tegangan pemrograman ketika akan memrogram memori flash internal. Jika EA/Vpp pada kondisi low maka mikrokontroler menjalankan instruksi-instruksi yang ada pada memori internal.
k) XTAL1 1
Sebagai masukan dari rangkaian osilator dan masukan rangkaian clock internal.
l) XTAL 2
Sebagai keluaran dari rangkaian osilator.
2.2.3 Organisasi Memori
Mikrokontroler ATMEL-51 mempunyai organisasi memori yang terdiri atas:
A. Memori Program (CODE)
hanya bisa dibaca (Read Only Memory) dalam artian ketika sedang eksekusi program memori ini hanya bersifat dibaca saja tidak dapat diubah isinya.
B. Memori Data (DATA)
Yang dimaksud memori data adalah RAM internal (on chip). AT89S51 memiliki memori data internal sebesar 128 byte. Pada memori data dibagi menjadi tiga bagian pengalamatan mulai alamat ox00 s/d 0x0F dikenal sebagai register R0 s/d R7. Bagian berikutnya adalah mulai alamat 0x20 s/d 0x2F sebanyak 128 bit merupakan lokasi memori yang dapat dimanipulasi per bit (bit addressable) juga dikenal dengan segment bit (BDATA). Bagian berikutnya adalah general purpose RAM mulai alamat 0x30 s/d 0x7F.
C. Memori Data Indirect (IDATA)
Merupaka segment data seluruh ruang memori data internal yaitu mulai alamat 0x00 s/d 0xFF. Pada 128 Pada 128 byte awal yaitu ooh s/d 7FH secara fisik sama dengan segment DATA, dan 128 byte diatasnya dimulai yaitu mulai alamat 0x80 s/d 0xFF overlap dengan Psecial Function Register (SFR).
D. Memori Data Pengalamatan Bit (BIT)
E. Memori Data Eksternal (XDATA)
XDATA adalah ruang memori data off chip atau tidak terdapat didalam chip mikrokontroler. Ruang alamat ini diakses melalui Port 0 (P0) dan Port 2 (P2). XDATA bersifat dapat dibaca dan ditulisi (read/write memory). Pengaksesan memori program eksternal dikendalikan oleh signal PSEN (Program StoryEnable), sedangkan pengaksesan memori data eksternal dikendalikan oleh signal RD untuk dibaca dan signal WR untuk tulis.
F. Memori Data Halaman Eksternal (PDATA)
Secara fisik PDATA sama dengan XDATA, perbedaannya pada PDATA hanya menggunakan P0 untuk rendah dan P2 tetap terhubung dengan register P2 di SFR
G. Special Function Register (SFR)
SFR merupakan register khusus yang digunakan sebagai kendali, buffer atau fungsi khusus lainnya. SFR dipetakan mulai alamat 0x80 s/d 0xFF. Tidak seluruh ruangan alamat diimplementasikan dengan suatu register. Beberapa register dapat dialamati per bit.
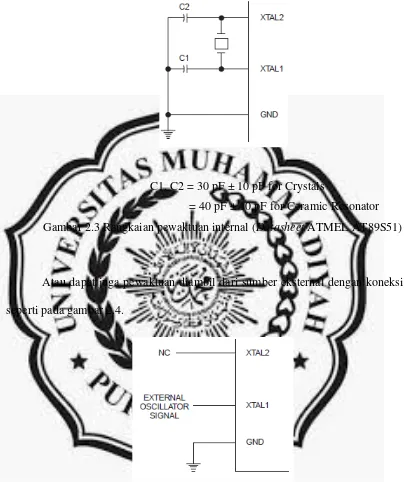
2.2.4 Pewaktuan CPU
C1, C2 = 30 pF ± 10 pF for Crystals
= 40 pF ± 10 pF for Ceramic Resonator Gambar 2.3 Rangkaian pewaktuan internal (Datasheet ATMEL AT89S51)
Atau dapat juga pewaktuan diambil dari sumber eksternal dengan koneksi seperti pada gambar 2.4.
2.2.5 Catu Daya
Catu daya merupakan pemberi sumber daya bagi perangkat elektronika. Perangkat elektronika umumnya dicatu oleh power supply arus searah DC (direct current) yang stabil agar dapat bekerja dengan baik. Baterai atau accu adalah sumber catu daya DC yang paling baik. Namun untuk aplikasi yang membutuhkan catu daya lebih besar, sumber dari baterai tidak cukup. Sumber catu daya yang besar adalah sumber bolak-balik AC (alternating current) dari pembangkit tenaga listrik. Untuk itu diperlukan suatu perangkat catu daya yang dapat mengubah arus AC menjadi DC.
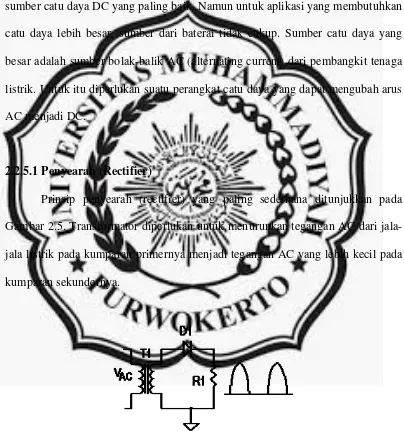
2.2.5.1Penyearah (Rectifier)
Prinsip penyearah (rectifier) yang paling sederhana ditunjukkan pada Gambar 2.5. Transformator diperlukan untuk menurunkan tegangan AC dari jala-jala listrik pada kumparan primernya menjadi tegangan AC yang lebih kecil pada kumparan sekundernya.
Pada rangkaian ini, dioda berperan untuk hanya meneruskan tegangan positif ke beban R1. Ini yang disebut dengan penyearah setengah gelombang (half wave). Untuk mendapatkan penyearah gelombang penuh (full wave) diperlukan transformator dengan center tap (CT) seperti pada Gambar 2.6 di bawah ini.
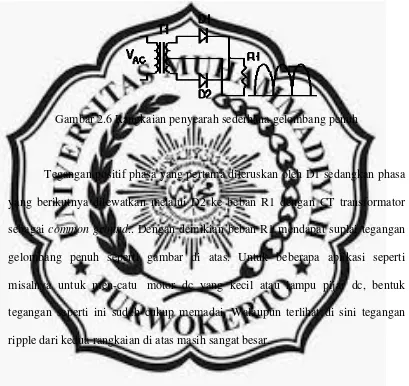
Gambar 2.6 Rangkaian penyearah sederhana gelombang penuh
Tegangan positif phasa yang pertama diteruskan oleh D1 sedangkan phasa yang berikutnya dilewatkan melalui D2 ke beban R1 dengan CT transformator sebagai common ground.. Dengan demikian beban R1 mendapat suplai tegangan gelombang penuh seperti gambar di atas. Untuk beberapa aplikasi seperti misalnya untuk men-catu motor dc yang kecil atau lampu pijar dc, bentuk tegangan seperti ini sudah cukup memadai. Walaupun terlihat di sini tegangan ripple dari kedua rangkaian di atas masih sangat besar.
2.2.5.2Rangkaian Penyearah Setengah Gelombang Dengah Filter C
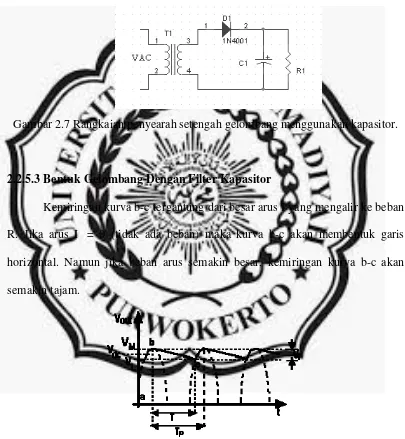
dengan filter kapasitor. Garis b-c adalah garis lurus dengan kemiringan tertentu, dimana pada keadaan ini arus untuk beban R1 dicatu oleh tegangan kapasitor. Sebenarnya garis b-c bukanlah garis lurus tetapi eksponensial sesuai dengan sifat pengosongan kapasitor
Gambar 2.7 Rangkaian penyearah setengah gelombang menggunakan kapasitor.
2.2.5.3Bentuk Gelombang Dengan Filter Kapasitor
Kemiringan kurva b-c tergantung dari besar arus I yang mengalir ke beban R. Jika arus I = 0 (tidak ada beban) maka kurva b-c akan membentuk garis horizontal. Namun jika beban arus semakin besar, kemiringan kurva b-c akan semakin tajam.
2.2.5.4.Rangkaian Penyearah Gelombang Penuh Dengan Filter C
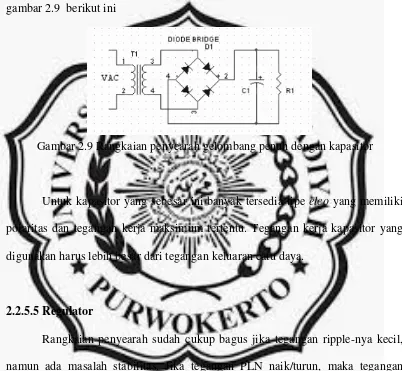
Penyearah gelombang penuh dengan filter C dapat dibuat dengan menambahkan kapasitor pada rangkaian. Bisa juga dengan menggunakan transformator yang tanpa CT, tetapi dengan merangkai 4 dioda seperti pada gambar 2.9 berikut ini
Gambar 2.9 Rangkaian penyearah gelombang penuh dengan kapasitor
Untuk kapasitor yang sebesar ini banyak tersedia tipe elco yang memiliki polaritas dan tegangan kerja maksimum tertentu. Tegangan kerja kapasitor yang digunakan harus lebih besar dari tegangan keluaran catu daya.
2.2.5.5Regulator
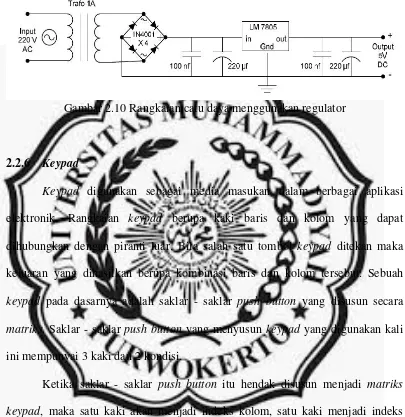
Rangkaian regulator yang paling sederhana ditunjukkan pada Gambar 2.10.
Gambar 2.10 Rangkaian catu daya menggunakan regulator
2.2.6 Keypad
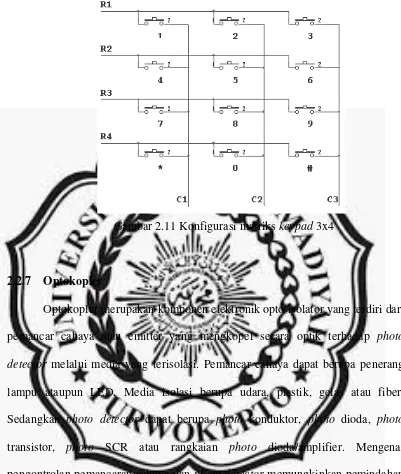
Keypad digunakan sebagai media masukan dalam berbagai aplikasi elektronik. Rangkaian keypad berupa kaki baris dan kolom yang dapat dihubungkan dengan piranti luar. Bila salah satu tombol keypad ditekan maka keluaran yang dihasilkan berupa kombinasi baris dan kolom tersebut. Sebuah keypad pada dasarnya adalah saklar - saklar push button yang disusun secara matriks. Saklar - saklar push button yang menyusun keypad yang digunakan kali ini mempunyai 3 kaki dan 2 kondisi.
Gambar 2.11 Konfigurasi matriks keypad 3x4
2.2.7 Optokopler
Optokopler merupakan komponen elektronik opto isolator yang terdiri dari pemancar cahaya atau emitter yang mengkopel secara optik terhadap photo detector melalui media yang terisolasi. Pemancar cahaya dapat berupa penerang lampu ataupun LED. Media isolasi berupa udara, plastik, gelas atau fiber. Sedangkan photo detector dapat berupa photo konduktor, photo dioda, photo transistor, photo SCR atau rangkaian photo dioda/amplifier. Mengenai pengontrolan pemancaran cahaya dan photo detector memungkinkan pemindahan informasi dari suatu rangkaian yang mengandung pemancar cahaya ke rangkaian yang mengandung photo detector.
kerusakan rangkaian input yang disebabkan oleh perbedaan tegangan yang relatif tinggi terhadap rangkaian output.
Optokopler dirancang untuk menggantikan fungsi saklar mekanis dan pengubahan pulsa secara fungsional optokopler sama dengan pasangan relay mekanis karena suatu isolasi tingkat tinggi diantara terminal input dan outputnya.Beberapa keunggulan optokopler komponen solid state adalah:
Kecepatan operasi lebih cepat Ukuran kecil
Tidak mudah dipengaruhi getaran dan goncangan Respon frekuensi
Tidak ada bounce
Kompatibel dengan banyak rangkaian – rangkaian logika dan mikroprosesor.
(a) (b)
Gambar 2.12 (a) Simbol optokopler
2.2.8 Relay
Relay adalah suatu rangkaian switching magnetik yang bekerja bila mendapat catu dari rangkaian trigger. Relay memiliki tegangan dan arus nominal yang harus dipenuhi output rangkaian pendrivernya/pengemudinya. Arus yang digunakan pada rangkaian adalah arus DC.
Konstruksi dalam suatu relay terdiri dari lilitan kawat (coil) yang dililitkan pada inti besi lunak. Jika lilitan kawat mendapatkan arus, inti besi lunak menghasilkan medan magnet dan menarik switch kontak. Switch kontak mengalami gaya tarik magnet sehingga berpindah posisi ke kutub lain atau terlepas dari kutub asalnya. Keadaan ini akan bertahan selama arus mengalir pada kumparan relay. Dan relay akan kembali ke posisi semula yaitu normaly-off, bila tidak ada lagi arus yag mengalir padanya. Posisi normal relay tergantung pada jenis relay yang digunakan. Dan pemakaian jenis relay tergantung pada keadaan yang diinginkan dalam suatu rangkaian/sistem.
Menurut kerjanya relay dapat dibedakan menjadi:
Normaly Open (NO); saklar akan tertutup bila dialiri arus.
Normaly Close (NC); saklar akan terbuka bila dialiri arus.
Change Over (CO); relay ini mempunyai saklar tunggal yang normalnya tertutup
yang mana bila kumparan 1 dialiri arus maka saklar akan terhubung ke terminal
A, sebaliknya bila kumparan 2 dialiri arus maka saklar akan terhubung ke
terminal B.
Analogi rangkaian relay yang digunakan adalah saat basis transistor ini dialiri
kolektor ke emiter yang mengakibatkan relay terhubung. Sedangkan fungsi dioda
disini adalah untuk melindungi transistor dari tegangan induksi yang bisa mencapai
100 sampai 150 volt dimana tegangan ini dapat merusak transistor
Gambar 2.13 Simbol relay
Gambar 2.14 Rangkaian penggerak relay
2.2.9 Water Meter
tampilan angka, tampilan skala, jarum untuk penunjuk skala. Elemen utama yang dimanfaatkan pada watermeter manual adalah putaran piringan, karena dari putaran piringan inilah maka menjadi masukan bagi sensor optocoupler untuk nantinya diproses di dalam mikrokontroler dan di tampilkan pada display dalam bentuk tampilan digital.
Watermeter sebagai alat yang digunakan untuk mengukur linier, nonlinier, massa atau laju aliran volumetrik cairan atau gas. Sebelum menetapkan flow meter, juga dianjurkan untuk menentukan apakah aliran informasi akan lebih berguna jika disajikan dalam unit massa atau volumetrik. Ketika mengukur aliran bahan kompresibel, aliran volumetrik tidak terlalu berarti, kecuali kepadatan (dan kadang-kadang juga viskositas) adalah konstan. Ketika kecepatan (volumetrik aliran) dari cairan mampat diukur, kehadiran ditangguhkan gelembung akan menyebabkan kesalahan, karena itu, udara dan gas harus dipindahkan sebelum mencapai fluida meter.
2.2.10 LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) merupakan suatu bentuk kristal cair yang akan berubah warnanya apabila dikenakan tegangan padanya. LCD yang digunakan adalah M1632 yang terdiri dari 2 baris, 16 kolom dimulai dari baris 1 paling atas dan kolom 0 paling kiri. Modul LCD Character dapat dengan mudah dihubungkan dengan mikrokontroller seperti AT89S51. LCD Character 2×16, dengan 16 pin konektor, yang didifinisikan sebagai berikut:
Tabel 2.2 PIN dan Fungsi LCD
PIN Nama Fungsi
Display karakter pada LCD diatur oleh pin EN, RS dan RW. Jalur EN dinamakan Enable. Jalur ini digunakan untuk memberitahu LCD bahwa sedang mengirimkan sebuah data. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat logika low “0” dan set pada dua jalur kontrol yang lain RS dan RW. Ketika dua jalur yang lain telah siap, set EN dengan logika “1” dan tunggu untuk sejumlah waktu tertentu (sesuai dengan datasheet dari LCD tersebut) dan berikutnya set EN ke logika low “0” lagi.
Jalur RS adalah jalur Register Select. Ketika RS berlogika low “0”, data akan dianggap sebagi sebuah perintah atau instruksi khusus (seperti clear screen, posisi kursor dll). Ketika RS berlogika high “1”, data yang dikirim adalah data text yang akan ditampilkan pada display LCD. Sebagai contoh, untuk menampilkan huruf “T” pada layar LCD maka RS harus diset logika high “1”. Jalur RW adalah jalur kontrol Read/ Write. Ketika RW berlogika low (0), maka informasi pada bus data akan dituliskan pada layar LCD. Ketika RW berlogika high ”1”, maka program akan melakukan pembacaan memori dari LCD. Sedangkan pada aplikasi umum pin RW selalu diberi logika low ”0”. Pada akhirnya, bus data terdiri dari 4 atau 8 jalur (bergantung pada mode operasi yang dipilih oleh user). Pada kasus bus data 8 bit, jalur diacukan sebagai DB0 s/d DB7.
2.2.11 Solenoid
Solenoid adalah suatu alat dasar yang mengkonversi suatu sinyal listrik ke dalam gerakan mekanis, pada umumnya seperti garis. solenoid terdiri dari suatu kumparan dan alat pengisap. Pengisap tersebut mungkin adalah freestanding atau dimuati pegas. Jika terdapat batang besi dan ditempatkan sebagian panjangnya di dalam solenoid, batang tersebut akan bergerak masuk ke dalam solenoid saat arus dialirkan. Hal ini dapat dimanfaatkan untuk menggerakkan tuas. Tuas inilah yang nantinya untuk menggerakkan katup. Kumparan mempunyai beberapa rating tegangan atau arus dan tipenya mungkin DC atau AC. Spesifikasi Solenoid meliputi rating listrik dan gaya pengisap menarik atau mendorong ketika yang diberi tegangan tertentu. Gaya ini mungkin dinyatakan dalam newton atau kilogram di dalam sistem SI, dan dalam pound atau ons dalam Sistem Inggris. Beberapa solenoid terbatas hanya untuk tugas sebentar-sebentar oleh karena batasan yang berkenaan dengan panas. Dalam hal ini, duty cycle maksimum (persentase total waktu) akan ditetapkan. Solenoid digunakan ketika suatu gaya mendadak yang besar harus dipakai untuk melaksanakan beberapa pekerjaan.
Keterangan gambar solenoid valve: 1. Blok katup
2. Masukan 3. Keluaran 4. Solenoid
5. Blok kumparan kawat 6. Terminal catu daya 7. Piston
8. Pegas 9. Lubang
2.2.12 Transistor
Transistor adalah suatu monokristal semikonduktor dimana terjadi dua pertemuan P-N, dari sini dapat dibuat dua rangkaian yaitu P-N-P dan N-P-N. Dalam keadaan kerja normal, transistor harus diberi polaritas sebagai berikut :
1. Pertemuan Emitter-Basis diberi polaritas dari arah maju seperti yang ditunjukkan pada Gambar 2.18 (a).
2. Pertemuan Basis-kolektor diberi polaritas dalam arah mundur seperti ditunjukkan pada Gambar 2.18 (b).
(a) NPN (b) PNP
Transistor juga sering disebut sebagai suatu komponen yang dapat memperbesar level sinyal keluaran sampai beberapa kali sinyal masukan. Sinyal masukan disini dapat berupa sinyal AC ataupun DC. Prinsip dasar transistor sebagai penguat adalah arus kecil pada basis mengontrol arus yang lebih besar dari kolektor melewati transistor. Transistor berfungsi sebagai penguat ketika arus basis berubah. Perubahan kecil arus basis mengontrol perubahan besar pada arus yang mengalir dari kolektor ke emitter. Pada saat ini transistor berfungsi sebagai penguat.
Dan dalam pemakiannya, transistor juga bisa berfungsi sebagai saklar dengan memanfaatkan daerah penjenuhan (saturasi) dan daerah penyumbatan (cut-off). Pada daerah penjenuhan nilai resistansi penyambungan kolektor emitter secara ideal sama dengan nol atau kolektor terhubung langsung (short). Ini menyebabkan tegangan kolektor emitter Vce = 0 pada keadaan ideal. Dan pada daerah cut off, nilai resistansi persambungan kolektor emitter secara ideal sama dengan tak terhingga atau terminal kolektor dan emitter terbuka yang menyebabkan tegangan Vce sama dengan tegangan sumber Vcc.
2.2.13 Dioda
Dioda ialah jenis VACUUM tube yang memiliki dua buah elektroda. Dioda tabung pertama kali diciptakan oleh seorang ilmuwan dari Inggris yang bernama Sir J.A. Fleming (1849-1945) pada tahun 1904.
Hampir semua peralatan elektronika memerlukan sumber arus searah. Penyearah digunakan untuk mendapatkan arus searah dari suatu arus bolak-balik. Arus atau tegangan tersebut harus benar-benar rata tidak boleh berdenyut-denyut agar tidak menimbulkan gangguan bagi peralatan yang dicatu.
Dioda sebagai salah satu komponen aktif sangat popular digunakan dalam rangkaian elektronika, karena bentuknya sederhana dan penggunaannya sangat luas. Ada beberapa macam rangkaian dioda, diantaranya : penyearah setengah gelombang (Half-Wave Rectifier), penyearah gelombang penuh (Full-Wave Rectifier), rangkaian pemotong (Clipper), rangkaian penjepit (Clamper) maupun pengganda tegangan (Voltage Multiplier).
Anoda Katoda Gambar 2.20 Simbol dioda
ini mengingatkan kita pada arus konvensional dimana arus mudah mengalir dari sisi P ke sisi N.
Dioda terbagi atas beberapa jenis antara lain : Dioda germanium
Dioda silikon Dioda selenium Dioda zener
Dioda cahaya (LED)
Dioda termasuk komponen elektronika yang terbuat dari bahan semikonduktor. Beranjak dari penemuan dioda, para ahli menemukan juga komponen turunan lainnya yang unik. Dioda memiliki fungsi yang unik yaitu hanya dapat mengalirkan arus satu arah saja. Struktur dioda tidak lain adalah sambungan semikonduktor P dan N. Satu sisi adalah semikonduktor dengan tipe P dan satu sisinya yang lain adalah tipe N. Dengan struktur demikian arus hanya akan dapat mengalir dari sisi P menuju sisi N.
2.2.14 IC LM 78XX
aplikasi perubahan tegangan ini cukup mengganggu, sehingga diperlukan komponen aktif yang dapat meregulasi tegangan keluaran ini menjadi stabil.
Rangkaian regulator yang paling sederhana ditunjukkan pada gambar 2.12 Pada rangkaian ini, zener bekerja pada daerah breakdown, sehingga menghasilkan tegangan output yang sama dengan tegangan zener atau Vout = Vz. Namun rangkaian ini hanya bermanfaat jika arus beban tidak lebih dari 50mA.
Gambar 2.21 Regulator zener
Prinsip rangkaian catu daya yang seperti ini disebut shunt regulator, salah satu ciri khasnya adalah komponen regulator yang paralel dengan beban. Ciri lain dari shunt regulator adalah, rentan terhadap short-circuit. Perhatikan jika Vout terhubung singkat (short-circuit) maka arusnya tetap I = Vin/R1. Disamping regulator shunt, ada juga yang disebut dengan regulator seri. Prinsip utama regulator seri seperti rangkaian pada gambar 7 berikut ini. Pada rangkaian ini tegangan keluarannya adalah:
VBE adalah tegangan base-emitor dari transistor Q1 yang besarnya antara 0.2 - 0.7 volt tergantung dari jenis transistor yang digunakan. Dengan mengabaikan arus IB yang mengalir pada base transistor, dapat dihitung besar tahanan R2 yang diperlukan adalah :
R2 = (Vin - Vz)/Iz ...(2.3)
Iz adalah arus minimum yang diperlukan oleh dioda zener untuk mencapai tegangan breakdown zener tersebut. Besar arus ini dapat diketahui dari datasheet yang besarnya lebih kurang 20 mA.
Gambar 2.22 Regulator zener follower
Teknik regulasi yang lebih baik lagi adalah dengan menggunakan Op-Amp untuk men-drive transistor Q, seperti pada rangkaian gambar II.8. Dioda zener disini tidak langsung memberi umpan ke transistor Q, melainkan sebagai tegangan referensi bagi Op-Amp IC1. Umpan balik pada pin negatif Op-amp adalah cuplikan dari tegangan keluar regulator, yaitu :
Vin(-) = (R2/(R1+R2)) Vout ……….………(2.4)
Jika tegangan keluar Vout menaik, maka tegangan Vin(-) juga akan menaik sampai tegangan ini sama dengan tegangan referensi Vz. Demikian sebaliknya jika tegangan keluar Vout menurun, misalnya karena suplai arus ke beban meningkat, Op-amp akan menjaga kestabilan di titik referensi Vz dengan memberi arus IB ke transistor Q1. Sehingga pada setiap saat Op-amp menjaga kestabilan :
Vin(-) = Vz ...(2.5)
Dengan mengabaikan tegangan VBE transistor Q1 dan mensubsitusi rumus (11) ke dalam rumus (10) maka diperoleh hubungan matematis :
Vout = ( (R1+R2)/R2) Vz ...(2.6)
Pada rangkaian ini tegangan output dapat diatur dengan mengatur besar R1 dan R2.
Sekarang mestinya tidak perlu susah payah lagi mencari op-amp, transistor dan komponen lainnya untuk merealisasikan rangkaian regulator seperti di atas. Karena rangkaian semacam ini sudah dikemas menjadi satu IC regulator tegangan tetap. Saat ini sudah banyak dikenal komponen seri 78XX sebagai regulator tegangan tetap positif dan seri 79XX yang merupakan regulator untuk tegangan tetap negatif. Bahkan komponen ini biasanya sudah dilengkapi dengan pembatas arus (current limiter) dan juga pembatas suhu (thermal shutdown). Komponen ini hanya tiga pin dan dengan menambah beberapa komponen saja sudah dapat menjadi rangkaian catu daya yang ter-regulasi dengan baik.
Misalnya 7805 adalah regulator untuk mendapat tegangan 5 volt, 7812 regulator tegangan 12 volt dan seterusnya. Sedangkan seri 79XX misalnya adalah 7905 dan 7912 yang berturut-turut adalah regulator tegangan negatif 5 dan 12 volt.
Selain dari regulator tegangan tetap ada juga IC regulator yang tegangannya dapat diatur. Prinsipnya sama dengan regulator OP-amp yang dikemas dalam satu IC misalnya LM317 untuk regulator variable positif dan LM337 untuk regulator variable negatif. Bedanya resistor R1 dan R2 ada di luar IC, sehingga tegangan keluaran dapat diatur melalui resistor eksternal tersebut.
Hanya saja perlu diketahui supaya rangkaian regulator dengan IC tersebut bisa bekerja, tegangan input harus lebih besar dari tegangan output regulatornya. Biasanya perbedaan tegangan Vin terhadap Vout yang direkomendasikan ada di dalam datasheet komponen tersebut. Pemakaian heatshink (aluminium pendingin) dianjurkan jika komponen ini dipakai untuk men-catu arus yang besar. Di dalam datasheet, komponen seperti ini maksimum bisa dilewati arus mencapai 1 A.
2.2.15 Perangkat Lunak (Bahasa Asembly)
Dalam pembuatan sebuah rangkaian mikrokontroler tidak hanya dibutuhkan perangkat keras, tetapi juga dibutuhkan perangkat lunak. Fungsi dari perangkat lunak ini sebagai pengendali untuk mengendalikan semua proses yang ada dalam seluruh sistem dan mengaturnya. Perangkat lunak ini akan dimasukkan dalam mikrokontroler. Pada pembuatan Tugas Akhir ini penulis menggunakan perangkat lunak Assembly. Bahasa assembly dikategorikan sebagai bahasa tingkat rendah (low level languange). Ini untuk menggambarkan kekhususannya sebagai bahasa yang berorientasi pada mesin.
2.2.16 Pengenalan Bahasa Assembly
manusia yang mudah diingat), untuk setiap instruksi kode mesin, dan didukung juga beberapa kelebihan lain untuk mempermudah pembuatan program, termasuk pengujian atas kemungkinan adanya error dalam penulisan. Sekarang mnumonic digunakan secara luas dalam bidang ilmu pengetahuan, buku-buku tehnik yang merujuk pada kode dengan tujuan semuanya agar lebih mudah untuk diingat. Kode bahasa assembly diterjemahkan ke dalam bahasa mesin oleh sebuah program lain, yang kemudian disebut sebagai Assembler.
Bahasa assembly juga dikenal sebagai bahasa tingkat rendah (low-level-languages) karena bahasa ini adalah yang paling berhubungan langsung dengan struktur CPU. Dalam memprogram bahasa ini, programer harus benar-benar mengenal semua register dalam CPU, ukuran masing-masingnya, termasuk berbagai detil dari instruksi serta efeknya terhadap register.
Namun sekarang, seseorang dapat menggunakan berbagai bahasa yang jauh lebih memudahkan, misalnya seperti BASIC, Pascal, C, C++, Java , dan banyak lagi lainnya.
untuk sekarang, kita berkonsentrasi pada bahasa assembly yang khusus untuk 8051, dan membuat program yang dapat bekerja dengan baik hanya dengan menggunakan bahasa itu. Assembler yang kita gunakan ini adalah sebuah program yang dibuat bersama-sama begitu diperkenalkannya Chip 8051 oleh Intel, yakni program "ASM51.EXE" dengan nama resmi "MCS-51 MACRO ASSEMBLER V2.3" buatan Intel Corporation.
2.2.17 Struktur Bahasa Assembly
Program dalam bahasa assembly yang dicontohkan di atas adalah statement yang berurutan, di mana terdiri dari instruksi misalnya ADD dan MOV, dan beberapa statement lain, yang disebut dengan Directive. Setiap instruksi, adalah memerintahkan CPU untuk melakukan sesuatu hal, sedang directive ( juga disebut dengan psuedo-instruction) memberikan arahan bagi assembler cara menterjemahkan kode di belakang ungkapan directive tersebut. Ambil contoh, intstruksi MOV dan ADD adalah sebuah perintah, sedang ORG dan END adalah directive (petunjuk arahan) bagi assembler. ORG dalam contoh diatas meminta kepada Assembler bahwa opcode selanjutnya agar ditempat dalam memory lokasi 0, sementara END adalah untuk memberitahukan assembler akhir dari program, dan mengabaikan setiap text di bahwa END.
Pada prinsipnya instruksi bahasa assembly terdiri dari 4 bagian :
[label] mnumonic [operand] [;komentar]
Tanda kurung diatas (bracket) adalah menunjukkan bagiannnya, agar bisa lebih jelas, dan bukan dimasukkan dalam kode yang sebenarnya. Adapun penjelasannya adalah sebagai berikut ini :
deklarasi identifier lain dan diakhiri dengan karakter titik-dua. Identifier hanya bisa dibentuk dengan karakter pertama adalah karakter Alphabet, dan karakter selanjutnya boleh juga numerik, dan karakter "_" serta "?". Panjang Label ini juga tidak boleh melebihi 255 karakter.
2. Bagian menumonic dan bagian operand dalam bahasa assembly adalah bagian utama dari kode program. Dan operand adalah spesifik atas mnumonic, yang mengisyaratkan tugas tertentu (Seperti yang sudah diatur oleh pabrik pembuat Chip dalam datasheet-nya). Ungkapan (statement) dalam bahasa assembly misalnya adalah :
ADD A,B MOV A,#67
3. Bagian komentar dimulai dengan karakter semi-colon (titik-koma) yang berarti karakter-karakter setelahnya adalah sebuah komentar. Assembler akan segera mengabaikan karakter-karakter sesudah karakter semi-colon tersebut. Mengingat assembler adalah menterjemahkan baris demi baris dalam program, maka setiap komentar harus dimulai dari karakter semi-colon itu, walaupun dalam baris tersebut tidak terdapat instruksi apapun.
2.2.18 Register
2.2.19 Instruksi MOV
Singkatnya instruksi MOV adalah menyalin isi data dari register yang satu ke register yang lain, dengan format sebagai berikut :
MOV dest, source ;salin data source ke dest
MOV A,R3 ;Salin isi R3 ke dalam A ;Sekarang A = 95h
Saat menulis program untuk mikrokontroller 8051, hal-hal berikut ini harus diperhatikan:
a. Bahwa sebuah nilai dapat langsung diberikan pada register-register misalnya A, B, R0 s/d R7. Namun bagaimanapun juga untuk mengindikasikan bahwa sebuah simbol adalah sebagai sebuah nilai, dan bukan sebagai alamat atau yang lain, sebelumnya harus diberi simbol pound atau pagar atau "#".
MOV A,#23h ;Mengisi A dengan nilai 23h
b. Jika nilai 0 s/d F kita isikan pada sebuah register 8-bit, maka akan mengubah 4-bit paling kecil dari register tersebut. Dan kita akan mendapatkan 4-bit teratas darinya akan dibuat menjadi 0. Misalnya dengan instruksi "MOV A,#5", maka sejatinya instruksi tersebut adalah sama dengan "MOV A,#05h", dan menghasilkan A = 05h. Dan dalam bilangan biner adalah A = 00000101 biner.
c. Mengisikan sebuah nilai yang terlalu besar dari nilai yang sanggup ditampung sebuah register akan menghasilkan error.
MOV A,#7F2h ; 7F2h > (8-bit atau FFh atau 255 desimal) MOV R2,#456 ; 456d > (8-bit atau FFh atau 255 dec)
d. Untuk mengisikan nilai ke dalam register, kita harus mengimbuhkan symbol pound (#). Jika tidak ada simbol tersebut, maka assembler akan menganggapnya sebagai sebuah lokasi memory. Ambil contoh "MOV A,17h" yang berarti pindahkan isi nilai dari memory 17h ke dalam A. Sedang saat kita menginginkan untuk mengisi A dengan nilai 17h, maka kita harus menuliskan dengan "MOV A,#17h". Tidak adanya symbol pagar tersebut tidak akan membuat assembler menghasilkan error namun assembler akan membuatkan kode yang bukan seperti kemauan kita, hanya karena kesalahan kecil kita dalam menulis program. Biasanya hal ini biasa terjadi bagi para pemula.
2.2.20 Instruksi ADD
Instruksi ADD adalah berdasar pada format :
ADD A,Source ;Tambahakan source ke Akumulator
Instruksi ini menambahkan sembarang tipe data ke dalam A dan A pula bertindak sebagai penerima hasil dari operasi. Sehingga dapat dikata operand tujuan (Dest) selalu adalah Akumulator (A).
Contohnya:
MOV A,#25h ;Isi A dengan nilai 25h MOV R2,#34h ;Isi R2 dengan nilai 34h ADD A,R2 ;Tambahakan keduanya
;Jadi A = A + R2
Menjalankan program di atas akan menghasilkan A = 59h (25h + 34h = 59h) dan nilai pada R2 tidak berubah setelah instruksi ADD, yakni 34h. Sekali lagi operand source tidak akan berubah. Program di bawah ini adalah contoh program yang lebih kompleks.
MOV R5,#25h ;Isi R7 dengan nilai 25h MOV R7,#34h ;Isi R5 dengan nilai 34h MOV A,#0 ;Clear isi A menjadi 0
ADD A,R7 ;Tambahakan A dengan isi R7 ;Jadi A = A + R7
Program di atas menghasilkan nilai 59h yang terdapat pada A. Ada banyak cara untuk memberi pengalamatan, namun sedapat mungkin mencari cara yang paling singkat dan cepat. Ini adalah cara lebih cepat.
MOV A,#25h ;Isi A dengan nilai 25h ADD A,#34h ;Tambahakan A dengan 34h
Sekali lagi dapat kita lihat dari berbagai contoh di atas operand tujuan selalu adalah A. Jika kita memaksa menuliskan kode seperti "ADD R2,A" tentu akan menghasilkan error. 8051 memang hanya mendukung operasi arimatika dan logika yang hanya menggunakan A sebagai akumulator, dan dengan kata lain operasi tersebut dibatasi selebar 8-bit. Namun walaupun demikian hal itu sudah lebih dari cukup untuk membuat program untuk berbagai aplikasi canggih, misalnya robot.