Abstrak— Geothermal power plant merupakan suatu
pembangkit listrik yang memanfaatkan panas bumi sebagai sumber energinya. Dalam suatu geothermal power plant terdapat steam turbin dan generator yang berfungsi untuk mengkonversi energi kalor (steam) menjadi energi listrik. Performansi dari kedua komponen tersebut merupakan faktor penting yang menentukan performansi sistem secara keseluruhan. Performansi steam turbin ditinjau dari kecepatan putarannya, sedangkan performansi generator ditinjau dari tegangan terminalnya. Kecepatan putaran turbin dikendalikan dengan cara memanipulasi flowrate steam melalui governing system, sedangkan tegangan terminal dikendalikan dengan cara memanipulasi arus exciter pada excitation system. Pengendalian seperti ini merupakan jenis pengendalian multivariabel. Salah satu controller yang sesuai untuk pengendalian multivariabel adalah MPC. Karena itu, dalam tugas akhir ini dirancang sistem pengendalian steam turbin dan generator berbasis MPC. Plant yang dimodelkan adalah steam turbin dan generator yang ada di PT Geo Dipa Energi. Berdasarkan pada Mp, Ts dan Ess yang ditunjukkan pada hasil simulasi, pengendali MPC memberikan respon yang lebih baik dibandingkan dengan pengendali PI yang saat ini digunakan di real plant.
Kata kunci : excitation system, generator, governing system, MPC,
steam turbin.
I. PENDAHULUAN
embangkit Listrik Tenaga Panas Bumi (PLTP) merupakan salah satu energi terbarukan yang berpotensi di Indonesia. Hal ini dikarenakan Indonesia termasuk wilayah yang dilalui oleh Ring of Fire sehingga mempunyai potensi geothermal sebesar 27000 MW. PLTP memanfaatkan energi panas bumi (geothermal) lalu mengkonversinya menjadi energi listrik. Sampai 2010, sudah terdapat 7 PLTP yang beroperasi di Indonesia, salah satunya adalah PT Geo Dipa Energi unit Dieng yang mempunyai potensi 60 MW.
Energi listrik yang dihasilkan oleh PT Geo Dipa Energi akan dikirim ke jaringan PLN. Hal itu bisa dilakukan apabila ada sinkronisasi antara power plant dengan jaringan PLN. Sinkronisasi tersebut bisa terjadi jika dua sumber yang terhubung mempunyai tegangan dan frekuensi yang sama. Untuk itu tegangan terminal generator harus selalu dijaga agar sesuai dengan tegangan pada jaringan PLN. Sedangkan, frekunsi dijaga dengan menjaga kecepatan putaran turbin. Tegangan generator dan kecepatan putaran turbin yang dihasilkan memberi pengaruh besar pada sistem secara keseluruhan. Untuk itu, keduanya dikendalikan. Saat ini, sistem pengendali yang digunakan pada real plant adalah PI
controller. Pengendali tersebut merupakan controller
konvensional yang hanya bisa mengendalikan satu variabel. Karena itu, dalam tugas akhir dilakukan penelitian tentang
MPC yang bisa mengendalikan sistem multivariabel. MPC ini akan diterapkan secara simulasi untuk mengendalikan steam turbin dan generator. Respon yang dihasilkan oleh controller MPC pada simulasi diharapkan bisa lebih baik dibandingkan PI controller yang saat ini digunakan pada real plant.
II. URAIANPENELITIAN
A. Tinjauan Plant dan Pengamatan Proses PLTP Dieng
Pengamatan proses lebih dititikberatkan pada proses yang berhubungan dengan steam turbine dan generator, yaitu :
steam turbin, governing system, generator, excitation system,
dan juga network. Dalam rangka untuk merancang sistem pengendalian steam turbin dan generator,dilakukan pengambilan beberapa data sewaktu pengamatan proses. Adapun data yang diperlukan adalah spesifikasi steam turbin dan generator dan juga data proses.
Gambaran umum tentang plant bisa dilihat pada gambar 1 di bawah ini.
Perlu diketahui bahwa tegangan terminal generator di Geo Dipa dijaga pada 15 kV, sedangkan kecepatan putaran steam turbin dijaga 3000 rpm. Saat ini daya aktif yang dihasilkan oleh power plant adalah ±15 MW.
PERANCANGAN SISTEM PENGENDALIAN STEAM TURBIN-GENERATOR
BERBASIS MODEL PREDICTIVE CONTROL (MPC) DI PT GEO DIPA ENERGI
UNIT DIENG JAWA TENGAH
Dhita Kurniarum1, Katherin Indriawati2
Teknik Fisika, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected], [email protected]
P
B. Tahap Pemodelan Plant
Pemodelan plant dibuat dalam satuan per unit (pu) dan didasarkan pada diagram blok pengendalian plant seperti yang terlihat pada gambar 2 di bawah ini.
Rangkaian yang ada di dalam governing dan excitation system bisa dilihat pada gambar 3 di bawah ini.
Pemodelan Steam Turbin dan Governing System
Pemodelan steam turbin dan governor system terbagi menjadi tiga, yaitu : pemodelan governor valve, steam turbin dan shaft. Adapun penjelasan dari masing-masing komponen tersebut adalah sebagai berikut.
Governor valve
Pemodelan governor valve dibuat berdasarkan persamaan input-output yang ada pada sistem. Untuk lebih jelasnya bisa dilihat pada persamaan di bawah ini
[2] 𝑜𝑢𝑡𝑝𝑢𝑡 𝑖𝑛𝑝𝑢𝑡 = ∆𝑌 𝑢 (1) dengan 𝑢 = 𝑒𝑟𝑟𝑜𝑟 ∗ 𝑐𝑜𝑛𝑡𝑟𝑜𝑙𝑙𝑒𝑟 (2) 𝑒𝑟𝑟𝑜𝑟 = �∆𝜔 �𝑅1 𝑝� + 𝑃𝑟𝑒𝑓− 𝑚̇� (3) dimana
∆𝑌 : Bukaan valve / gate opening (pu) 𝑢 : Sinyal kontrol (pu)
𝑅𝑝 : Speed droop steam turbin (pu)
𝑃𝑟𝑒𝑓 : Daya referensi (pu)
𝑚̇ : Flow steam pada ST (pu)
Kecepatan referensi steam turbin adalah 1 pu (setara 3000 rpm), speed drop 0,05, dan daya referensinya adalah 0,2 pu setara 15 MW).
Sinyal kontrol yang dihasilkan (u) akan diteruskan menuju
speed relay dan servo motor. Speed relay dimodelkan dalam
bentuk fungsi transfer seperti di bawah ini.
𝑇𝐹𝑠𝑝𝑒𝑒𝑑 𝑟𝑒𝑙𝑎𝑦 = 𝑇𝑠𝑟 𝑠+11 (4)
dimana
𝑇𝑠𝑟 adalah speed relay time constant dengan nilai 0,001 s.
Servo motor merupakan komponen yang mengatur bukaan
valve sesuai sinyal kontrol yang diberikan. Di PT Geo Dipa,
bukaan valve dibatasi sampai 50% saja, karena itu pemodelan servo motor diberi batasan dengan lower limit -0,5 pu dan
upper limit 0,5 pu. Sedangkan gate opening ratenya dibatasi
-0,25 sampai -0,25 pu/s. Time constant dari servo motor tersebut adalah 0,15 s.
Steam turbin
Pemodelan untuk steam turbin dibuar berdasarkan persamaan di bawah ini.
[2] 𝑜𝑢𝑡𝑝𝑢𝑡 𝑖𝑛𝑝𝑢𝑡 = 𝑇𝑚 ∆𝑌 (5) dengan 𝑇𝑚= 𝐹𝑚̇ (6)
Pemodelan steam turbin dalam bentuk fungsi transfer adalah sebagai berikut.
𝑇𝐹𝑆𝑇= 𝑇𝑠𝑡1 𝑠+1 (7)
dimana
𝑇𝑚 : Torsi mekanik (pu)
𝐹 : Steam turbine torque fraction 𝑇𝑠𝑡 : Steam turbine time constant (s)
Steam turbin yang digunakan pada plant adalah single turbin
atau nonreheater sehingga mempunyai nilai F sebesar 1. Time
constant steam turbin yang digunakan adalah 0,2 s.
Output dari shaft adalah daya mekanik yang diperoleh berdasarkan persamaan di bawah ini.
Shaft
𝑃𝑚= 𝜔 𝑇𝑚
(8) Dimana
𝜔 : Kecepatan putaran steam turbin yang dihasilkan (pu) Pemodelan Generator dan Excitation System
Pemodelan kedua komponen tersebut bisa dilihat dibawah ini. STEAM TURBINE GENERATOR Excitation System Governing System ωref ω gen Pref + - + + -Vstab Vref Vfd V, I, Pe Pm ∆Y error To Network + + -1/Rp PSS Shaft ṁ ∆ω Tm + + + Vgen error
Gambar 2. Diagram blok sistem pengendalian steam turbin dan generator
PI Controller Servo motor Speed Relay ∆Y error u (a) PI
Controller Saturasi Exciter
error u Vfd
(b)
Pemodelan elektrik generator dibuat berdasarkan pada rangkaian d-axis dan q-axis seperti yang terlihat pada gambar 4.
Generator
[3]
Persamaan synchronous generator menjadi seperti di bawah ini.[3] 𝑉𝑑= 𝑅𝑠𝑖𝑑+𝑑𝑡𝑑𝜑𝑑− 𝜔𝑅𝜑𝑞 (9) 𝑉𝑞= 𝑅𝑠𝑖𝑞+𝑑𝑡𝑑𝜑𝑞− 𝜔𝑅𝜑𝑑 (10) 𝑉′𝑓𝑑= 𝑅′𝑓𝑑𝑖′𝑓𝑑+𝑑𝑡𝑑𝜑′𝑓𝑑 (11) 𝑉′𝑘𝑑= 𝑅′𝑘𝑑𝑖′𝑘𝑑+𝑑𝑡𝑑𝜑′𝑘𝑑 (12) 𝑉′𝑘𝑞1= 𝑅′𝑘𝑞1𝑖′𝑘𝑞1+𝑑𝑡𝑑𝜑′𝑘𝑞1 (13) 𝑉′𝑘𝑞2= 𝑅′𝑘𝑞2𝑖′𝑘𝑞2+𝑑𝑡𝑑𝜑′𝑘𝑞2 (14) dengan 𝜑𝑑= 𝐿𝑑𝑖𝑑+ 𝐿𝑚𝑑�𝑖′𝑓𝑑+ 𝑖′𝑘𝑑� (15) 𝜑𝑞= 𝐿𝑞𝑖𝑞+ 𝐿𝑚𝑞𝑖′𝑘𝑞 (16) 𝜑′𝑓𝑑 = 𝐿′𝑓𝑑𝑖′𝑓𝑑+ 𝐿𝑚𝑑(𝑖𝑑+ 𝑖′𝑘𝑑) (17) 𝜑′𝑘𝑑= 𝐿′𝑘𝑑𝑖′𝑘𝑑+ 𝐿𝑚𝑑�𝑖𝑑+ 𝑖′𝑓𝑑� (18) 𝜑′𝑘𝑞1= 𝐿′𝑘𝑞1𝑖′𝑘𝑞1+ 𝐿𝑚𝑞𝑖𝑞 (19) 𝜑′𝑘𝑞2= 𝐿′𝑘𝑞2𝑖′𝑘𝑞2+ 𝐿𝑚𝑞𝑖𝑞 (20) dimana 𝑅𝑠 : Resistansi stator (Ω) 𝐿𝑙𝑠 : Leakage induktansi (H)
𝐿𝑚𝑞 & 𝐿𝑚𝑑 : q & d-axis magnetizing inductance (H)
𝑉𝑞 & 𝑉𝑑 : q & d-axis voltage (V)
𝑖𝑞& 𝑖𝑑 : q & d-axis current (A)
𝐿′𝑘𝑞1, 𝐿′𝑘𝑞2 & 𝐿′𝑘𝑑 : q & d-axis leakage induktansi (H)
𝑅′𝑘𝑞1, 𝑅′𝑘𝑞2 & 𝑅′𝑘𝑑 : q & d-axis resistansi (Ω)
𝑖′𝑘𝑞1, 𝑖′𝑘𝑞2 & 𝑖′𝑘𝑑 : q & d-axis current (A)
𝑉′𝑘𝑞1, 𝑉′𝑘𝑞2 & 𝑉′𝑘𝑑 : q & d-axis voltage (V)
𝐿′𝑓𝑑 : Field leakage induktansi (H)
Sedangkan, arus dihitung dengan persamaan di bawah ini.
𝑖𝑞 = �𝜑𝑞− 𝜑𝑚𝑞�−1𝐿𝑙 (21) 𝑖𝑑= (𝜑𝑑− 𝜑𝑚𝑑)−1𝐿𝑙 (22) dengan 𝜑𝑚𝑞 = 𝜑𝑞𝐿𝐿𝑎𝑞 𝑙 + 𝜑′𝑘𝑞1 𝐿𝑎𝑞 𝐿𝑘𝑞1+ 𝜑′𝑘𝑞2 𝐿𝑎𝑞 𝐿𝑘𝑞2 (23) 𝜑𝑚𝑑= 𝜑𝑞𝐿𝐿𝑎𝑞𝑙 + 𝜑′𝑓𝑑𝐿𝐿𝑎𝑞𝑓𝑑+ 𝜑′𝑘𝑑𝐿𝐿𝑎𝑞𝑘𝑑 (24) dimana
𝐷 : Koefisien redaman (pu) 𝐻 : konstanta inersia (pu) 𝑇𝑚 : Torsi mekanik (pu)
𝜑𝑚𝑞 : q-axis mutual flux (pu)
𝜑𝑚𝑑 : d-axis mutual flux (pu)
Output yang dihasilkan generator adalah tegangan, arus dan daya aktif. Adapun perhitungannya bisa dilihat pada persamaan di bawah ini.
𝑉𝑡= �𝑉2𝑞+ 𝑉2𝑑 (25)
𝐼𝑡= �𝑖2𝑞+ 𝑖2𝑑 (26)
𝑃𝑒𝑜= 𝑉𝑑𝑖𝑑+ 𝑉𝑞𝑖𝑞 (27)
dimana
𝑉𝑡 : Tegangan terminal generator (pu)
𝐼𝑡 : Arus generator (pu)
𝑃𝑒𝑜 : Power active (pu)
Excitation system dibuat berdasarkan diagram blok pada
gambar 3.(b). Pemodelan exciter dibuat dalam bentuk fungsi transfer seperti yang ditunjukkan oleh persamaan di bawah ini.
Excitation system
𝑇𝐹𝐸𝑥𝑐𝑖𝑡𝑒𝑟= 𝑇𝑒𝐾 𝑠+1𝑒 (28)
dimana
𝐾𝑒 : Exciter gain
𝑇𝑒 : Exciter time constant (s)
Tegangan referensi generator adalah 1 pu (setara 15 kV). Nilai Ke adalah 1, dan Te adalah 0,001 s.
(a)
(b) Gambar 4. (a) q-axis, (b) d-axis
Nilai Vstab merupakan output dari Power System stabilizer
yang didalamnya terdiri dari velocity transmitter, washout, kompensator, dan limiter. Adapun pemodelannya dibuat dalam bentuk fungsi transfer seperti persamaan berikut ini.
𝑇𝐹𝑣𝑡= 𝑇𝑣𝑡1 𝑠+1 (29)
𝑇𝐹𝑤𝑎shout= 𝑇𝑤𝑇𝑤 𝑠+1 𝑠 (30)
TFlead−lag= TT21 s+ 1 s+1 TT34 s+1s+ 1 (31)
dimana
𝑇𝑣𝑡 : Velocity transmitter time constant (0,003 s)
𝑇𝑤 : Washout time constant (2 s)
T1, T2, T3, & T4 : Lead-lag time constant (0,005 s ; 0,0025 s;
0,3 s ; 0,15 s)
Limiter digunakan untuk membatasi output PSS. Dalam
pemodelan ini, output PSS dibatasi dengan lower limit -0,2 pu dan upper limit 0,2 pu.
C. Alogaritma MPC
Didalam MPC terdapat beberapa komponen, yaitu model proses, fungsi kriteria dan Guadratic Programming. Adapun lebih jelasnya bisa dilihat di bawah ini.[4]
Pembuatan algoritma MPC diawali dengan membuat model linear dari plant dalam bentuk state space diskrit. Model Proses / Plant
𝑥(𝑘 + 1) = 𝐴𝑥(𝑘) + 𝐵𝑢(𝑘) (32)
𝑦(𝑘) = 𝐶𝑥(𝑘) (33)
dimana
𝐴U : matriks keadaan berdimensi n x n
𝐵U : matriks masukan berdimensi n x l
𝐶U : matriks keluaran berdimensi m x n
Perhitungan sinyal kendali pada MPC dilakukan dengan meminimumkan suatu fungsi kriteria yang berbentuk kuadratik seperti berikut :
Fungsi Kriteria 𝑉(𝑘) = ∑ �𝑦 �(𝑘 + 𝑖|𝑘) − 𝑟(𝑘 + 𝑖|𝑘)� 𝑄(𝑖) 2 + 𝐻𝑝 𝑖=1 ∑𝐻𝑢−1�∆𝑢�(𝑘 + 𝑖|𝑘)�𝑅(𝑖)2 𝑖=0 (34) dimana
𝒚 �(𝒌 + 𝒊|𝒌) : keluaran terprediksi untuk i-langkah ke depan saat waktu k
𝒓(𝒌 + 𝒊|𝒌) : nilai trayektori acuan (reference trajectory) ∆𝒖�(𝒌 + 𝒊|𝒌) : perubahan nilai sinyal kendali terprediksi
untuk i-langkah kedepan saat waktu k
Q(i) dan R(i) : faktor bobot Hp : prediction horizon Hu : control horizon
Metode quadratic programming ini digunakan untuk perhitungan nilai optimal perubahan sinyal kontrol
Quadratic Programming
ΔU(k)opt.
𝐽(𝑘) = ∆𝑈𝑇(𝑘) 𝐻∆𝑈(𝑘) − ∆𝑈𝑇(𝑘)𝐺 (35)
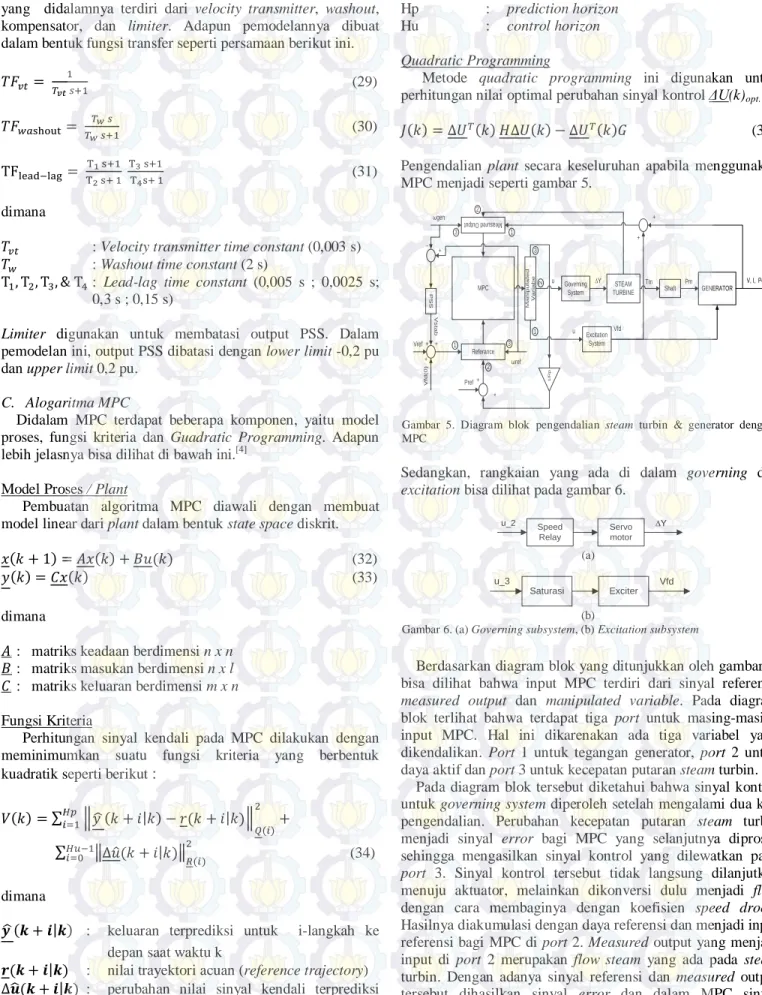
Pengendalian plant secara keseluruhan apabila menggunakan MPC menjadi seperti gambar 5.
Sedangkan, rangkaian yang ada di dalam governing dan
excitation bisa dilihat pada gambar 6.
Berdasarkan diagram blok yang ditunjukkan oleh gambar 6, bisa dilihat bahwa input MPC terdiri dari sinyal referensi,
measured output dan manipulated variable. Pada diagram
blok terlihat bahwa terdapat tiga port untuk masing-masing input MPC. Hal ini dikarenakan ada tiga variabel yang dikendalikan. Port 1 untuk tegangan generator, port 2 untuk daya aktif dan port 3 untuk kecepatan putaran steam turbin.
Pada diagram blok tersebut diketahui bahwa sinyal kontrol untuk governing system diperoleh setelah mengalami dua kali pengendalian. Perubahan kecepatan putaran steam turbin menjadi sinyal error bagi MPC yang selanjutnya diproses sehingga mengasilkan sinyal kontrol yang dilewatkan pada
port 3. Sinyal kontrol tersebut tidak langsung dilanjutkan
menuju aktuator, melainkan dikonversi dulu menjadi flow dengan cara membaginya dengan koefisien speed droop. Hasilnya diakumulasi dengan daya referensi dan menjadi input referensi bagi MPC di port 2. Measured output yang menjadi input di port 2 merupakan flow steam yang ada pada steam turbin. Dengan adanya sinyal referensi dan measured output tersebut dihasilkan sinyal error dan dalam MPC sinyal tersebut akan dirubah menjadi sinyal kontrol yang dilewatkan
Speed Relay Servo motor ∆Y u_2 (a) Saturasi Exciter Vfd u_3 (b)
Gambar 6. (a) Governing subsystem, (b) Excitation subsystem MPC Referance Measured Output Manipulated Variabe STEAM TURBINE GENERATOR Governing System V, I, Pe Pm ∆Y u Shaft Tm Excitation System Vfd Pref ωref Vref ωgen u 1/Rp + + + + Vfd(0) + + Vstab + PSS + -1 2 3 3 3 2 2 1 1
Gambar 5. Diagram blok pengendalian steam turbin & generator dengan MPC
pada port 2. Sinyal kontrol pada port 2 inilah yang akan menjadi input bagi aktuator pada governing system. Bisa dikatakan bahwa MPC yang digunakan dimodelkan dalam bentuk cascade.
Apabila dilihat dari sistem eksitasinya, pemodelan pengendali PI maupun MPC mempunyai struktur yang hampir sama. Keduanya menggunakan tegangan referensi, initial field
voltage, tegangan PSS, tegangan output generator, dan eksitasi
untuk mendapatkan sinyal error
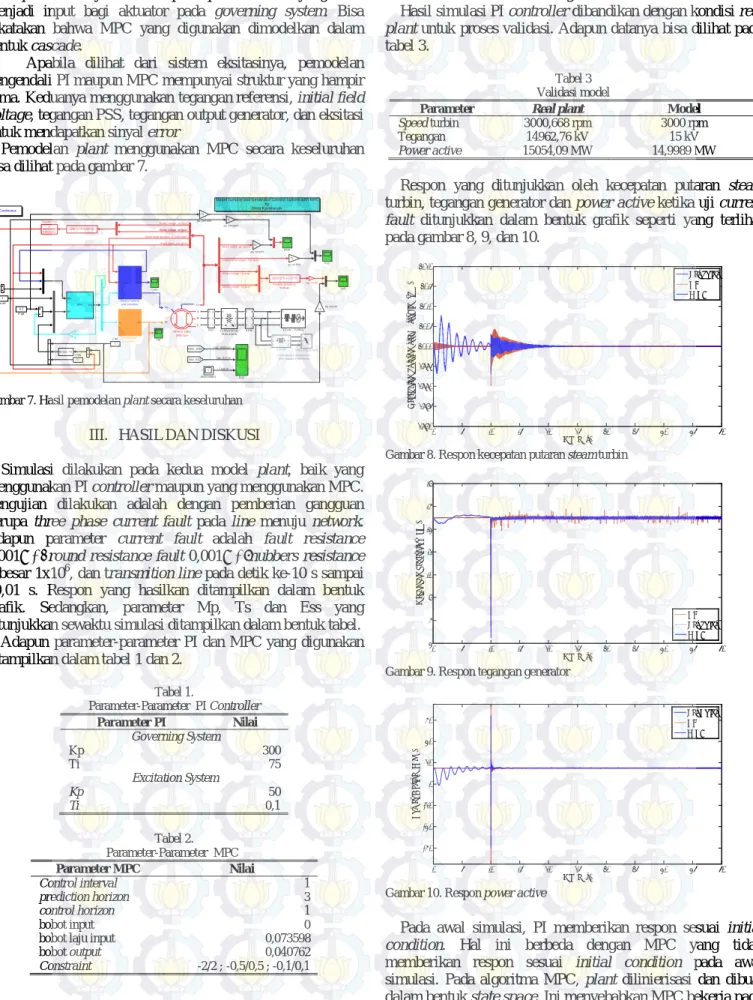
Pemodelan plant menggunakan MPC secara keseluruhan bisa dilihat pada gambar 7.
III. HASILDANDISKUSI
Simulasi dilakukan pada kedua model plant, baik yang menggunakan PI controller maupun yang menggunakan MPC. Pengujian dilakukan adalah dengan pemberian gangguan berupa three phase current fault pada line menuju network. Adapun parameter current fault adalah fault resistance 0,001Ω, ground resistance fault 0,001Ω, snubbers resistance sebesar 1x106
Adapun parameter-parameter PI dan MPC yang digunakan ditampilkan dalam tabel 1 dan 2.
, dan transmition line pada detik ke-10 s sampai 10,01 s. Respon yang hasilkan ditampilkan dalam bentuk grafik. Sedangkan, parameter Mp, Ts dan Ess yang ditunjukkan sewaktu simulasi ditampilkan dalam bentuk tabel.
Tabel 1. Parameter-Parameter PI Controller Parameter PI Nilai Governing System Kp 300 Ti 75 Excitation System Kp 50 Ti 0,1 Tabel 2. Parameter-Parameter MPC Parameter MPC Nilai Control interval 1 prediction horizon 3 control horizon 1 bobot input 0
bobot laju input 0,073598
bobot output 0,040762
Constraint -2/2 ; -0,5/0,5 ; -0,1/0,1
A. Hasil Simulasi Sistem Pengendalian
Hasil simulasi PI controller dibandikan dengan kondisi real
plant untuk proses validasi. Adapun datanya bisa dilihat pada
tabel 3.
Tabel 3 Validasi model
Parameter Real plant Model
Speed turbin 3000,668 rpm 3000 rpm
Tegangan 14962,76 kV 15 kV
Power active 15054,09 MW 14,9989 MW
Respon yang ditunjukkan oleh kecepatan putaran steam turbin, tegangan generator dan power active ketika uji current
fault ditunjukkan dalam bentuk grafik seperti yang terlihat
pada gambar 8, 9, dan 10.
Pada awal simulasi, PI memberikan respon sesuai initial
condition. Hal ini berbeda dengan MPC yang tidak
memberikan respon sesuai initial condition pada awal simulasi. Pada algoritma MPC, plant dilinierisasi dan dibuat dalam bentuk state space. Ini menyebabkan MPC bekerja pada
Gambar 7. Hasil pemodelan plant secara keseluruhan
Steam Tur bine and Gener ator Contr ol System with M PC by Dhita Kur niar um
Fault applied at peak Van VAn voltage of generator 1 w ref 1 v ref -C-v f(0) -K-pu =>> rpm 15pu =>> kV 75 pu =>> MW -K-pu => rpm -K-pu => kV 75 pu => MW Continuous Volt Vfd 20 1 0.0022s+1 Transfer Fcn A B C A B C Three-Phase Fault wm d_theta u f low gate Pm Steam Turbine and Governor RPM sqrt(u(1)^2 + u(2)^2) sqrt(u(1)^2 + u(2)^2) Positive Sequence Voltage Peo 0.2 P ref 1 Multimeter1 MPCmv mo ref Grid In Vstab Gate Iabc_B22 Vabc_B500 u Vf Excitation System A B C a b c B500 A B C a b c B22 A B C a b c 75 MVA-50 Hz 15 kV-150 kV Pm Vf_ m A B C 75 MVA 15kV 3000 rpm A B C 150 kV ; 75 MVA A B C A B C 0.1 mH Vabc_B500 (pu) Iabc_B22 (A) I_Fault (A) <Stator v oltage v q (pu)>
<Stator v oltage v d (pu)> <Rotor angle dev iation d_theta (rad)>
<Rotor speed wm (pu)> <Stator v oltage v d (pu)> <Stator v oltage v d (pu)> <Stator v oltage v q (pu)>
<Rotor speed wm (pu)>
<Output activ e power Peo (pu)>
Gambar 10. Respon power active
0 5 10 15 20 25 30 35 40 45 50 -60 -40 -20 0 20 40 60 Time (s) Po w er A cti ve ( M W ) Set Point PI MPC Gambar 8. Respon kecepatan putaran steam turbin
0 5 10 15 20 25 30 35 40 45 50 2980 2985 2990 2995 3000 3005 3010 3015 3020 Time (s) K ec ep atan p utaran s te am tu rb in ( rp m ) Set pointPI MPC
Gambar 9. Respon tegangan generator
0 5 10 15 20 25 30 35 40 45 50 4 6 8 10 12 14 16 18 Time (s) T eg an gan g en erato r ( kV ) PI Set point MPC
titik nol dan tidak sesuai initial condition. MPC baru bisa memberikan respon sesuai initial condition setelah berjalan selama beberapa detik. Pada detik ke-10, sistem diberi gangguan berupa current fault. Adanya gangguan ini membuat sistem menjadi tidak stabil. Pengendali PI ataupun MPC bisa membuat sistem kembali pada kondisi steady sesuai set point. Tetapi, apabila diperhatikan MPC memberikan sinyal kontrol yang lebih stabil dibandingkan PI controller sehingga respon yang dihasilkan juga lebih baik..
Gambar 8-10 diamati berdasarkan Mp, Ts, dan Ess-nya. Hasilnya ditampilkan dalm bentuk tabel seperti yang terlihat pada tabel 4.
Tabel4. Nilai Mp, Ts, & Ess
Controller Mp (%) Ts (s) Ess (%)
Kecepatan Putaran Steam Turbin
PI 0,17 7 3,33x10-3 MPC % 0,1 13 3,33x10-4 Tegangan Generator % PI - 0,4 0,4 MPC - 0,3 0,33 Power Active PI 200 1,5 1,87% MPC 100 0,6 0,33% B. Manipulated variable
Manipulated variable yang diperoleh ketika simulasi
dijadikan input bagi aktuator. Dalam hal ini, output dari aktuator adalah gate opening dan field voltage. Gate opening dan field voltage bergantung pada sinyal kontrol yang diberikan, oleh karena itu sinyal kontrol yang dihasilkan oleh
controller bisa diamati dari respon pada gate opening dan field voltage. Adapun respon yang ditunjukkn oleh gate opening
dan field voltage diperlihatkan pada gambar 11 dan 12.
Pada kondisi awal, MPC memang tidak bisa langsung mencapai kondisi ideal, tetapi apabila dilihat dari kestabilannya MPC mempunyai keunggulan dibandingkan PI
controller baik dari segi setling time ataupun maximum overshoot-nya.
IV. KESIMPULAN
Berdasarkan pada hasil simulasi, diketahui bahwa MPC cenderung memberikan respon yang lebih baik dibandingkan PI controller. Hal ini dikarenakan MPC mempunyai keunggulan untuk memprediksi sinyal kontrol untuk beberapa waktu ke depan sehingga sinyal kontrol yng dihasilkan lebih stabil. Selain itu, keunggulan MPC yang lain lebih efisien karena bisa mengendalikan sistem multivariable hanya dengan satu controller. Pada pengujian yang telah dilakukan, kecepatan putaran turbin mempunyai nilai Mp sebesar 0,1%,
Ts sebesar 13 s dan Ess 3,33x10-4%. Tegangan terminal
generator mempunyai nilai Ts sebesar 0,3 s dan Ess sebesar 0,33%. Sedangkan, power aktif mempunyai nilai Mp sebesar 100%, Ts sebesar 0,6 s dan Ess sebesar 0, 33 %.
UCAPANTERIMAKASIH
“Penulis mengucapkan terima kasih kepada Ibu Katherin Indriawati selaku dosen pembimbing yang telah banyak memberi pengarahan materi dan PT Geo Dipa Energi selaku perusahaan yang telah memberi ijin pengambilan data.”
DAFTAR PUSTAKA
[1] Machowski, Bialek & Bumby. 2008. “POWER SYSTEM DYNAMICS :
Stability and Control.” John Wiley & Sons, Ltd. New Delhi, India.
[2] IEEE committee report. “Dynamic models for steam and hydro turbines
in power system studies.” IEEE Transactions on Power Apparatus and
Systems, Vol.PAS-92, No.6, 1973, pp.1904-1915.
[3] Krause, Wasynczuk, & Sudhoff. 2002. “Analysis of Electric Machinery and Drive Systems.” Institute Electrical and Electronic Engineering, Inc. USA.
[4] Camacho, E.F.,& Bordons, C. 1998. “Model Predictive Control.” New York: Springer.
Gambar 12. Respon field voltage
0 5 10 15 20 25 30 35 40 45 50 0.75 0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2 Time (s) Fi el d V ol tag e ( pu ) PI MPC Gambar 11. Respon gate opening
0 5 10 15 20 25 30 35 40 45 50 0.05 0.1 0.15 0.2 0.25 Time (s) G ate o pe ni ng ( % ) PI MPC
![Gambar 1. Power generation system [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1913935.3506289/1.918.137.836.93.1095/gambar-power-generation-system.webp)