69
RANCANG BANGUN ALAT PEMANEN DAN PEMBERSIH KOTORAN
AYAM BROILER BERBASIS MIKROKONTROLER ARDUINO UNO
MENGGUNAKAN SISTEM CONVEYOR
Nizar Anggriawan Pambudi1,Slamet Supriyadi2 , Agus Mukhtar3 1,2,3)
Jurusan Teknik Mesin Universitas PGRI Semarang Jl. Sidodadi Timur No. 24 Kota Semarang, 50232
E-mail : [email protected]; [email protected]; [email protected]
ABSTRAK
Kendala yang menjadi masalah utama penyebab kotoran ayam menumpuk karena pembersihan dan pemanenan ayam broiler yang dilakukan secara koncensional yaitu dilakukan oleh campur tangan manusia. Sebagian besar peternak ayam mengeluhkan kondisi kandang ayam yang seringkali kotor dan menghasilkan bau yang tidak sedap, serta pada proses pemanenan memerlukan tenaga orang yang cukup banyak. Maka dari itu perlu diciptakan alat yang digunakan untuk mengatasi permasalahan tersebut. “Rancang bangun alat pemanen dan pembersih kotoran ayam broiler berbasis mikrokontroler arduino uno menggunakan sistem conveyor“, Alat ini mampu menggatikan tugas manusia dalam proses pemanenan dan juga pembersihan kotoran. Proses pembuatan alat ini yaitu pertama dengan melakukan survei guna memperoleh data yang valid kemudian merancang alat sesuai dengan kebutuhan peternak. Pengujian dilakukan dengan metode eksperimen yaitu memberikan variasi tegangan pada motor wiper, tegangan yang akan digunakan adalah 8 volt, 10 volt, 12 volt, dan 14 volt. Dan hasil pada percobaan eksperimen alat dengan memeberikan variasi tegangan untuk kecepatan motor wiper, maka didapatkan hasil yang paling efektif untuk proses pemanenan ayam broiler yaitu pada tegangan 14 volt dengan rata-rata kecepatan 12, 2 detik.
.
Kata Kunci:Mikrokontroler Arduino, ayam broiler, conveyor. ABSTRACT
The main problem that causes chicken manure to accumulate is due to conventional cleaning and harvesting of broilers, which is human intervention. Most of the chicken breeders complained about the condition of the chicken coop which is often dirty and produces an unpleasant odor, and the harvesting process requires a lot of manpower. Therefore, it is necessary to create a tool that is used to overcome these problems. "The design of a harvester and cleaning device for broiler chicken manure based on the Arduino Uno microcontroller uses a conveyor system", this tool is able to replace human tasks in the harvesting process and also cleaning the dirt. The process of making this tool is first by conducting a survey to obtain valid data then designing the tool according to the needs of the farmer. The test was conducted by using an experimental method, namely providing a variation of the voltage on the wiper motor, the voltage to be used is 8 volts, 10 volts, 12 volts, and 14 volts. And the results of the experimental experiment with the tool by giving variations in the voltage for the speed of the wiper motor, the most effective results for the harvesting process of broiler chickens were obtained, namely at a voltage of 14 volts with an average speed of 12, 2 seconds..
70
PENDAHULUAN
Usaha peternakan ayam broiler merupakan sub sektor peternakan yang saat ini berkembang dengan pesat, yang dikarenakan semakin tingginya permintaan akan ayam broiler yang sejalan dengan semakin bertambah jumlah penduduk setiap tahunnya.
Beternak ayam merupakan salah satu kegiatan yang masih banyak dilakukan oleh masyarakat desa ataupun masyarakat umum yang ingin berbisnis di bidang peternakan ayam karena rata-rata manusia mengkonsumsi daging ayam hampir setiap hari, sehingga bisnis ini sangat menguntungkan bagi peternaknya. Meskipun kegiatan berternak ini cukup sederhana, namun sebagian banyak orang yang mempermasalahkan tentang bagaimana cara merawat kandang ayam.
Kondisi kandang ayam yang kotor seringkali menjadi masalah utama di bidang peternakan ayam. Upaya pembersihan kotoran pada kandang ayam dilakukan secara konvensional melalui campur tangan manusia secara langsung. Peternak harus melepas papan penampung kotoran ayam terlebih dahulu lalu membuang dan membersihkan kotoran tersebut secara langsung. Proses pembuangan kotoran ini berlangsung secara terus menerus dan berkala dalam 3 kali sehari ataupun lebih dan membutuhkan waktu yang cukup lama. Proses ini akan sangat merepotkan apabila hal ini dilakukan secara langsung oleh peternak ayam setiap saat dan akan menjadi masalah apabila peternak tidak dapat melakukan pembersihan kandang tersebut setiap saat dikarenakan ada suatu hal. Apabila kandang ayam kebersihannya tidak terjaga maka kotoran ayam menjadi menumpuk sehingga kandang tersebut dapat berpotensi menimbulkan sarang penyakit yang dapat menyerang ayam ataupun peternak ayam. Berdasarkan hal tersebut, maka dibutuhkan sistem yang dapat menjaga kebersihan kandang ayam terutama dalam pembuangan kotoran ayam dengan kandang yang dilengkapi fitur sistem pembuangan kotoran secara otomatis. Pembuatan
pembersih kandang menggunakan timer dalam mengatur waktu pembersihan kotoran ayam. Perangkat pembersih dapat berjalan dengan baik untuk membersihkan kotoran ayam.
Berdasarkan permasalahan diatas maka penulis membuat penelitian yang berjudul “Rancang Bangun Alat pemanen dan pembersih kotoran ayam broilerberbasis mikrokontrollerarduinouno menggunakan sistem konveyor”.
METODE PENELITIAN A. Desain Penelitian
Dari penelitian ini dapat diperoleh data yang isinya adalah angka-angka yang melambangkan dari suatu sampel penelitian. Sampel penelitian yang dipilih haruslah obyek yang bisa diambil datanya serta dapat digunakan untuk menggambarkan keadaan secara menyeluruh dari obyek penelitian. Data-data yang diperoleh dari sumber penelitian sebagai menunjang sebuah penelitian.
B. Prosedur Penelitian
Metode yang di gunakan pada peneliti ini adalah metode eksperimen, dengan melakukan perbandingan berat ayam broiler yaitu 0, 5 kg, 1 kg, 1, 5 kg, dan 2 kg dengan masing-masing berat ayam tersebut diberikan
tegangan 8, 10, 12, 14
voltsehinggamenghasilkan kecepatan conveyor yang berbeda-beda.
HASIL DAN PEMBAHASAN A. Desain Awal Produk
1. Deskripsi Alat
Alat pemanen dan pembersih kotoran ayam broiler merupakan alat yang dapat
membantupara peternak
ataupengusahapembesaranayam
broiler.Alatinisangatberguna untuk mempersingkat waktu dan mengurangi tenaga yang dibutuhkan pada saat proses pemanenan ayam broilernya. Jadi, dengan menggunakan alat ini waktu yang dibutuhkan pada saat proses pemanenan ayam lebih efisien, dan hasil pembersihan kotoranyapun lebih bersih.
71 Alat pemanen dan pembersih kotoran ayam broiler ini dilengkapi dengan sebuah belt conveyor dengan kapasitas kurang lebih 4 kg untuk tempat panen dan pembersihan kotoran ayam. serta didalamnya juga terdapat sebuah motor wiper yang berfungsi sebagai pemutar belt conveyor, dan terdapat sebuah sensor RTC untuk mengatur waktu proses pembersihan kotoran ayam. Pada alat pemanen dan pembersih kotoran ayam broiler ini menggunakan arduino uno.
2. HasilImplementasi Perancangan
Hardware
Desain rancangan secara keseluruhan rangkaian alat merupakan gambaran secara utuh tentang alat yang akan dibuat. Berikut adalah rancangan mekanik Prototype Alat Pemanen dan pembersih kotoran ayam broiler.
Gambar 1. Alat
3. Hasil Implementasi Rangkaian
Kelistrikan
Rangkaian sensor RTC ini berisi tentang sistem rangkaian kelistrikan berupa input dan output. Tampian hasil uji alat dapat di tampilkan pada LCD. Bentuk rangkaian kelistrikan sensor RTC ada pada gambar dibawah ini:
Gambar 2. Rangkain kelistrikan alat menggunakan fritzing
B. Data Hasil Pengujian
Pengujian alat Pemanen dan Pembersih kotoran ayam broiler Berbasis
mikrokontroller arduino dilakukan beberapa
sempel putaran mesin yaitu pengujian kecepatan putaran motor menggunakan mikrokontroler Arduino. Pengujian ini diperlukan untuk mengetahui penggerak conveyor yang sesuai sehingga ayam tidak terlontar jauh pada saat proses pemanenan ayam.Pengujian dilakukan selama 4 kali dan pengujian menggunakan 3 variasi kecepatan motor yang berbeda, kemudian Pengujian proses pembersihan dilakukan untuk melihat proses serta fungsi keseluruhan mulai daripembacaansensorhingga proses hasil pembersihanya. Kemudian menuliskan hasilnya dalam bentuk tabel.
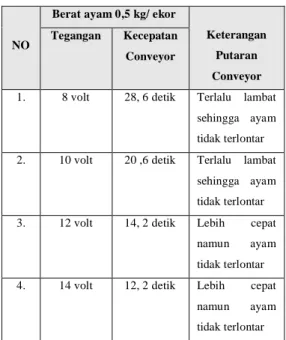
Tabel 1. Data Berat Ayam 0,5 kg/ekor
NO
Berat ayam 0,5 kg/ ekor
Keterangan Putaran Conveyor Tegangan Kecepatan
Conveyor
1. 8 volt 28, 6 detik Terlalu lambat sehingga ayam tidak terlontar 2. 10 volt 20 ,6 detik Terlalu lambat
sehingga ayam tidak terlontar 3. 12 volt 14, 2 detik Lebih cepat
namun ayam tidak terlontar 4. 14 volt 12, 2 detik Lebih cepat
namun ayam tidak terlontar
72 Gambar 3. Grafik kecepatan conveyor pada
berat ayam 0, 5 kg/ ekor
Tabel 2. Data berat ayam 1 kg/ ekor
Gambar 4. Grafik kecepatan conveyor pada berat ayam 1 kg/ ekor
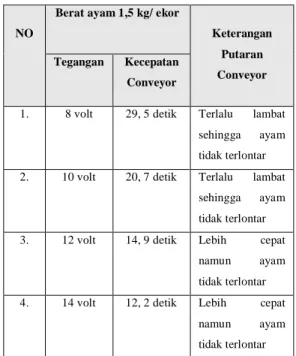
Tabel 3. Data berat ayam 1,5 kg/ ekor
0 5 10 15 20 25 30 35
8 volt 10 volt 12 volt 14 volt
D
eti
k
Tegangan Hubungan Kecepatan Conveyor
dan Tegangan
Berat Ayam 0,5 kg/ ekor
0 10 20 30 40
8 volt 10 volt 12 volt 14 volt
D
eti
k
Tegangan
Hubungan Kecepatan Conveyor dan Tegangan
Berat Ayam 1 kg/ ekor
NO
Berat ayam 1 kg/ ekor
Keterangan Putaran Conveyor Tegangan Kecepatan
Conveyor
1. 8 volt 29, 2 detik Terlalu lambat sehingga ayam tidak terlontar 2. 10 volt 20, 8 detik Terlalu lambat
sehingga ayam tidak terlontar 3. 12 volt 14, 7 detik Lebih cepat
namun ayam tidak terlontar 4. 14 volt 12, 29 detik Lebih cepat
namun ayam tidak terlontar
NO
Berat ayam 1,5 kg/ ekor
Keterangan Putaran Conveyor Tegangan Kecepatan
Conveyor
1. 8 volt 29, 5 detik Terlalu lambat sehingga ayam tidak terlontar 2. 10 volt 20, 7 detik Terlalu lambat
sehingga ayam tidak terlontar 3. 12 volt 14, 9 detik Lebih cepat
namun ayam tidak terlontar 4. 14 volt 12, 2 detik Lebih cepat
namun ayam tidak terlontar
73 Gambar 5. Grafik kecepatan conveyor pada
berat ayam 1, 5 kg/ ekor
Tabel 4. Data berat ayam 2 kg/ ekor
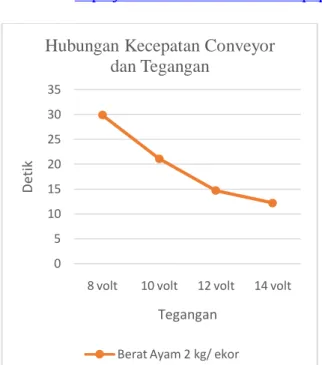
Gambar 6. Grafik kecepatan conveyor pada berat ayam 2 kg/ ekor
Tabel 5. Data berat ayam Gabungan
0 5 10 15 20 25 30 35
8 volt 10 volt 12 volt 14 volt
D
eti
k
Tegangan
Hubungan Kecepatan Conveyor dan Tegangan
Berat Ayam 1,5 kg/ ekor
0 5 10 15 20 25 30 35
8 volt 10 volt 12 volt 14 volt
D
eti
k
Tegangan
Hubungan Kecepatan Conveyor dan Tegangan
Berat Ayam 2 kg/ ekor
NO
Berat ayam 2 kg/ ekor
Keterangan Putaran Conveyor Tegangan Kecepatan
Conveyor
1. 8 volt 29, 9 detik Terlalu lambat sehingga ayam tidak terlontar 2. 10 volt 21, 1 detik Terlalu lambat
sehingga ayam tidak terlontar 3. 12 volt 14, 7 detik Lebih cepat
namun ayam tidak terlontar 4. 14 volt 12, 2 detik Lebih cepat
namun ayam tidak terlontar Pengujian Berat Tegangan 8 volt 10 volt 12 volt 14 volt 1 0, 5 kg 28, 6 det 20, 6 det 14, 2 det 12, 2 det 2 1 kg 29, 2 det 20, 8 det 14, 7 det 12, 29 det 3 1, 5 kg 29, 5 det 20, 7 det 14, 9 det 12, 2 det 4 2 kg 29, 9 det 20, 1 det 14, 7 det 12, 2 det
74 Gambar 7. Grafik kecepatan conveyor pada berat ayam 2 kg/ ekor
C. Pembahasan
1. Implementasi perancangan alat.
Alat berbahan besi hollow, besi L, kayu triplek, roler conveyor, v-belt conveyor dan anyaman besi. Desain alat berbentuk persegi panjang dimana kandang ayam dengan conveyor menjadi satu, kandang ayam berada diatas dan conveyor berada dibawah, untuk kontroler diletakkan pada permukaan atas kandang ayam. Dimensi kandang 150 cm x 52 cm x 112 cm, rangka kandang terbuat dari hollow ukuran 4 cm x 2 cm x 0,2 cm, dan untuk bagian tempat penyangga alas kandang ayam menggunakan besi L. Penutup kanan kiri belakang dan depan sebagai pintu kandang menggunakan anyaman besi yang biasa untuk bahan kandang. Kandang dibuat tidak terlalu besar dalam satu kandang ayam berisikian 5-7 ekor ayam bertujuan dengan cara mempetakan tempat demikian pemantauan ayam agar lebih mudah sehingga kebutuhan pakan dan nutrisi ayam tercukupi, dengan demikian panen akan lebih maksimal dalam memperoleh berat ayam yang bagus. Salah satu dari keunggulan sistem alat ini yaitu dalam pemanenan dan pembersiahan kotoran ayam.
Untuk panen dilakukan dengan cara menarik alas pijakan ayam yang sudah didesain sledingan, maka ayam akan jatuh ke
conveyor, fungsi conveyor disini untuk pengiriman ayam pada pusat pengemasan atau tempat siap jual yang berada di ujung tempat conveyor. Salain fungsi conveyor untuk pengirimin ayam juga dapat difungsikan sebagai pembersih kotoran secara otomatis dengan cara memutar arah sebaliknya dan diujung conveyor terdapat skrap yang dapat membersihkan kotoran ayam, kotoran ayam ini ditampung pada sebuah tempat yang nantinya dapat diolah menjadi pupuk tanaman.
2. Implementasi perancangan kelistrikan Pada sistem kelistrikan alat prototipe ini menggunakan komponen-komponen yang berarus DC, sehingga alat membutuhkan powe supply sebagai sumber tegangan yang dimana mampu mengubah tegangan AC ke DC. Pada alat sistem kandang ayam yang berbasis mikrokontroler Arduino Uno, menggunkan input dan output, untuk inputnya menggunkan RTC untuk sistem pembersihan kotoran otomatis dan modul pengatur kecepatan motor wiper digunakan untuk sistem panen sehingga dapat mengatur kecepatan motor wiper. Dan output pada alat ini adalah motor wiper yang berfungsi untuk menggerakan conveyor, pemilihan menggunakan motor wiper adalah beraurus DC sehingga dapat diputar bolak balik dan juga bertorsi lumayan cukup kuat. Semua komponen elektronik tersebut dikontrol menggunakan Arduino Uno yang sebelumnya sudah di setting program sesuai kebutuhan. Pada alat prototipe alasan memilih kontroler menggunkaan Arduino karena menghemat biaya, apabila untuk sekala industri baiknya menggunkan PLC. 3. Hasil pengambilan data
Pengujian ini dilakukan untuk mencari data kecepatan conveyor yang efektif pada saat proses pemanenan ayam broiler. Pengambilan data dengan cara mengambilan waktu dengan stopwatch yaitu memberi titik dari garis pusat conveyor awal hingga titik berkahir pada garis pusat conveyor akhir. Berdasarkan
10 15 20 25 30
8 volt 10 volt 12 volt 14 volt
D
et
ik
Tegangan
Hubungan Kecepatan Conveyor dan Tegangan
0,5 kg/ ekor 1 kg/ ekor 1,5 kg/ ekor 2 kg/ ekor
75 pada pengambilan data yang pertama yaitu dengan pemberian beban 0,5 kg/ ekor pada conveyor terlihat pada tabel 1 dengan tegangan 8 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 28,6 detik. Tegangan ditingkatkan menjadi 10 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 20,6 detik. Tegangan ditingkatkan ke 12 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 14,2 detik. Kembali memberikan tegangan pada 14 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 12,2 detik. Pada data tabel 4.1 yaitu dengan pemberian beban 0,5 kg/ ekor pada conveyor terlihat peningkatan tegangan berbanding lurus dengan kecepatan conveyor dapat dilihat pada gambar grafik 3 waktu mengalami pemangkasan waktu atau lebih cepat pada setiap kenaikan tegang. Dan pada percobaan pertama pemilihan kecepatan yang efektif untuk proses pemanenan yaitu pada pemberian tegangan 14 volt karena tidak terlalu cepat dan tidak lambat sehingga kecepatan pas untuk pemanenan. Percobaan dilanjutkan yang kedua, berdasarkan pada pengambilan data yang kedua yaitu dengan pemberian beban 1 kg/ ekor pada conveyor terlihat pada tabel 2 dengan tegangan 8 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 29,2 detik. Tegangan ditingkatkan menjadi 10 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 20,8 detik. Tegangan ditingkatkan ke 12 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 14,7 detik. Kembali memberikan tegangan pada 14 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 12,29 detik. Pada data tabel 2 yaitu dengan pemberian beban 1 kg/ekor pada conveyor terlihat peningkatan tegangan berbanding lurus dengan kecepatan conveyor dapat dilihat pada gambar grafik 4 waktu mengalami pemangkasan waktu atau lebih
cepat pada setiap kenaikan tegang. Dan pada percobaan kedua pemilihan kecepatan yang efektif untuk proses pemanenan yaitu pada pemberian tegangan 14 volt karena tidak terlalu cepat dan tidak lambat sehingga kecepatan pas untuk pemanenan. Percobaan yang ketiga, berdasarkan pada pengambilan data yang ketiga yaitu dengan pemberian beban 1,5 kg/ ekor pada conveyor terlihat pada tabel 3 dengan tegangan 8 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 29,5 detik. Tegangan ditingkatkan menjadi 10 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 20,7 detik. Tegangan ditingkatkan ke 12 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 14,9 detik. Kembali memberikan tegangan pada 14 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 12,2 detik. Pada data tabel 3 yaitu dengan pemberian beban 1,5 kg/ ekor pada conveyor terlihat peningkatan tegangan berbanding lurus dengan kecepatan conveyor dapat dilihat pada gambar grafik 5 waktu mengalami pemangkasan waktu atau lebih cepat pada setiap kenaikan tegang. Dan pada percobaan ketiga pemilihan kecepatan yang efektif untuk proses pemanenan yaitu pada pemberian tegangan 14 volt karena tidak terlalu cepat dan tidak lambat sehingga kecepatan pas untuk pemanenan.
Percobaan terakhir, berdasarkan pada pengambilan data yang keempat yaitu dengan pemberian beban 2 kg/ ekor pada conveyor terlihat pada tabel 2 dengan tegangan 8 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 29,9 detik. Tegangan ditingkatkan menjadi 10 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 21,1 detik. Tegangan ditingkatkan ke 12 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 14,7 detik. Kembali memberikan tegangan pada 14 volt conveyor berputar dengan kecepatan dari titik awal hingga akhir pada waktu 12,2
76 detik. Pada data tabel 4 yaitu dengan pemberian beban 2 kg/ ekor pada conveyor terlihat peningkatan tegangan berbanding lurus dengan kecepatan conveyor dapat dilihat pada gambar grafik 6 waktu mengalami pemangkasan waktu atau lebih cepat pada setiap kenaikan tegang. Dan pada percobaan keempat pemilihan kecepatan yang efektif untuk proses pemanenan yaitu pada pemberian tegangan 14 volt karena tidak terlalu cepat dan tidak lambat sehingga kecepatan pas untuk pemanenan. Pada keempat percobaan yang dilakukan dengan pemberian variasi berat yaitu 0,5 kg/ ekor, 1 kg/ ekor, 1,5 kg/ ekor, dan 2 kg/ ekor didapatkan kecepatan conveyor yang efektif untuk proses pemanenan yaitu pada pemberian tegangan 14 volt.
KESIMPULAN DAN SARAN Kesimpulan
Berdasarkan penelitian dan pembahasan yang telah dilakukan didapatkan kesimpulan sebagai berikut :
1. Alat rancang bangun pemanen dan pembersihan kotoran ayam broiler otomatis berbasis mikrokontroler
Arduino Uno dapat melakukan
fungsinya yaitu pemanenan dengan
conveyor dengan mengatur modul motor speed, dan juga alat mampu melakukan
pembersihan secara otomatis dengan pengaturan waktu diatur oleh RTC. 2. Keefektivan pemilihan kecepatan pada
proses pemanen yang paling tepat pada tegangan 14 volt.
Saran
1. Peneliti hanya menggunakan 4 variasi tegangan dan 4 variasi berat, apabila hendak melanjutkan maka menggunakan variasi lebih dari 4.
DAFTAR PUSTAKA
[1]. D.Akbar, “Purwarupa Sistem Kendali Otomatis dikandang Ayam Untuk Meminimalisir Gas Ammonia Berbasis Arduino,” 2020.
[2]. A.A. Pratama, A. Rusdinar, and B. Setiadi, “Perancangan Dan Realisasi Prototype Sistem Kontrol Otomatis Untuk Kandang Anak Ayam Menggunakan Metode Logika Fuzzy (Pemberi Pakan, Conveyor Berjalan, Kendali Suhu Dan Kelembaban) Design,” pp. 1–9, 2014.
[3]. B.F. Rahmat, D. Fatihana, R. Hadiarto, N. Cholis, and M. MT, “Sistem Pembersih Kotoran Kandang Ayam Otomatis Berbasis Mikrokontroler Pada,” vol. 4, no. 2, pp. 48–55, 2017. [4]. Anonim. (2019, Maret 13). Pengertian
Conveyor Dan Beberapa
Spesifikasinya. Retrieved from DNM
The Power Industry:
https://www.dnm.co.id/pengertian- conveyor-dan-spesifikasinya-mulai-roller-conveyor/
[5]. Daniel, J. (2019). Rancang Bangun
Kandang Ayam Portabel
Menggunakan Sensor Suhu, Sensor
Amonia, dam Pakan Otomatis.
Semarang: 2019.
[6]. Didik, E. W. (2017). Sistem Otomatis Pembersihan Kotoran dan Pengaturan Suhu Kandang Kelinci Berbasis Arduino Mega2560. Jurnal Rekayasa
Elektrika, 133-138.
[7]. Fuad, M. M. (2017). Rancang Bangun Sistem Kontrol Otomatis Pengatur Suhu Dan Kelembapan Kandang Ayam Broiler Menggunakan Arduino.
Journal Of Computer and Information System, 28-38.
[8]. Eswanto, Satri JP Sitompul,Tony Siagian, Iwan Gunawan, Aminur. 2020. Aplikasi PLTMH Penghasil Energi Listrik Di Sungai Lawang Desa Simbang Jaya Kecamatan Bahorok. Dinamika : Jurnal Ilmiah Teknik Mesin. Vol. 11, No. 2, Mei 2020: 56-64. DOI: 10.33772/djitm.v11i2.11678. [9]. Kho, D. (2020, 12 1). Pengertian Relay
dan Fungsinya. Retrieved from Teknik
77 https://teknikelektronika.com/pengertia n-relay-fungsi-relay/
[10]. Prihandanu, R., & dkk. (2015). Model Sistem Kandang Ayam Closed House Otomatis Menggunakan Omron
Sysmac CPM1A 20-CDR-A-V1.
Jurnal
[11]. Qamar, B., & dkk. (2019). Rancang Bangun Pembersih Kotoran Kandang Ayam Berdasarkan Berat Berbasis Arduino Uno R3. Jurnal Ilmiah
Computing Insight, 1-7.
[12]. Ali Fahmi Hasahari, M . Danny SAM, E Eswanto, 2017, Analisa Sistem Kerja Mesin Penggiling Emping Jagung Dengan Sistem Double Roller Kapasitas 100 kg/Jam, Jurnal Ilmiah “MEKANIK” Teknik Mesin ITM, Vol. 3 No. 2, November 2017 : 69-77. [13]. Ridhamuttaqin, A., & dkk. (2013).
Rancang Bangun Model Sistem Pemberi Pakan Ayam Otomatis Berbasis Fuzzy Logic Control. Jurnal
Rekayasa dan Teknologi Elektro,
126-137.
[14]. Sugiyono. (2016). Metode Penelitian
Pendidikan (Pendekatan Kuantitatif,
Kualitatif dan R&D). Bandung:
Alfabeta.
[15]. Syahfril, M. (2013). Panduan Mudah
Simulasi Dan Praktik Mikrokontroler Arduino. yogyakarta: Andi Offset.