RANCANG BANGUN SISTEM KONTROL HARDWARE R
Bebas
12
0
0
Teks penuh
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
Gambar


+7


Garis besar
Dokumen terkait
SENSOR PING PARALLAX SEBAGAI PENGUKUR JARAK PADA ROBOT CERDAS PEMADAM API.. BERBASIS
2 2015 Kontes Robot Indonesia (KRI) Tingkat Nasional Pembimbing Divisi Kontes Robot Pemadam Api Indonesia (KRPAI) Berkaki Universitas Muhammadiyah Yogyakarta. Not
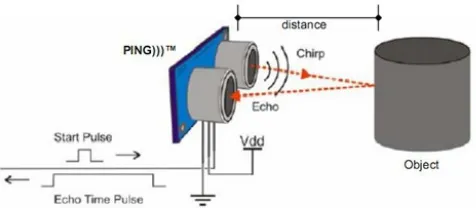
Robot pemadam api dirancang menggunakan empat roda dan terdiri dari beberapa sensor, seperti Flame Detector untuk mendeteksi adanya api, sensor ultrasonik sebagai navigasi
Implementasi algoritma dan sensor infrared yang di terapkan pada perancangan robot pemadam api kategori berkaki dalam Kontes Robot Cerdas Indonesia (KRCI) 2012 ini telah mampu
Dalam tugas akhir ini, telah dirancang prototype robot pemadam api yang mengadopsi standar Kontes Robot Cerdas Indonesia (KRCI) 2008.. Perancangan robot ini mengikuti
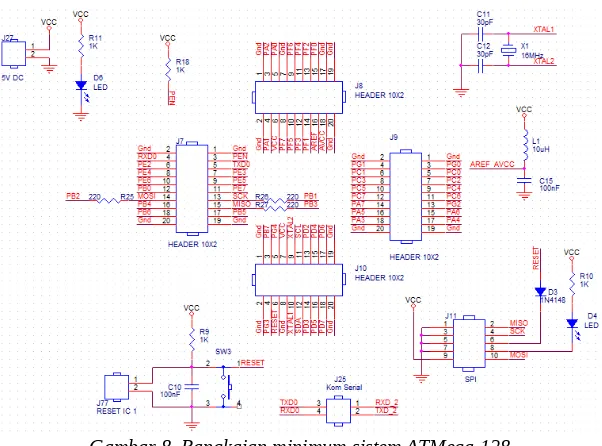
Sebelum kontroler Fuzzy diimplementasikan pada robot cerdas pemadam api dengan menggunakan mikrokontroler Atmega128, ada baiknya mensimulasikan terlebih dahulu
Pada KRI terdapat 5 (lima) divisi, yaitu: Kontes Robot ABU Indonesia (KRAI), Kontes Robot Pemadam Api Indonesia (KRPAI) Berkaki, Kontes Robot Sepak Bola Indonesia (KRSBI)
Dengan menggunakan metode fuzzy logic yang terintegrasi dengan mikrokontroler ARM Cortex berhasil mengontrol pergerakan motor penggerak robot kapal berdasarkan input fuzzy berupa
