Bab V
PENGUJIAN, PENGAMBILAN DATA, ANALISIS DAN KALIBRASI
V.1 Kalibrasi Sensor
V.1.1 Metode Kalibrasi
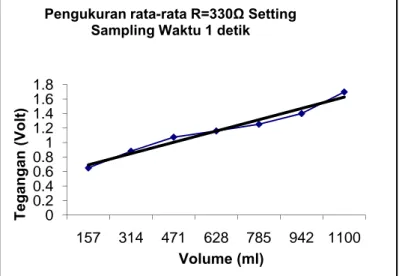
Pengujian untuk sensor ketinggian dilakukan dengan mengalirkan 157 mili liter larutan ke dalam tabung pencampur per pengalirannya. Jika tabung telah terisi penuh proses pengaliran kembali diulang hingga 5 kali pengukuran. Kaki kawat yang terhubung dengan hambatan sebesar 330 Ω diukur tegangannya. Pengukuran tegangan dilakukan untuk sampling waktu 1 detik. Hasil pengujian didapatkan data sebagai berikut.
Nilai dari linearitas pengukuran ini adalah y=0,00099x + 0,5364 dengan R2=0,9687. Standard deviasi pengukuran untuk sampling
Gambar 5.1 Pengukuran rata-rata R=330 Ohm Sensor Volume 0 0.2 0.4 0.6 0.81 1.2 1.4 1.6 1.8 157 314 471 628 785 942 1100 Tegangan (Volt) Volume (ml) Pengukuran rata-rata R=330Ω Setting
waktu 1 detik berada pada rentang 0,02 sampai 0,07 Volt. Kesalahan rata-rata didapatkan sebesar 4,95 %.
Ketidakstabilan data pengukuran yang didapat dari pengukuran diatas kemungkinan disebabkan oleh mengalirnya arus yang tidak hanya dari permukaan larutan, melainkan tersedianya waktu bagi arus untuk masuk ke permukaan larutan dan mengalirkan arus dari berbagai sisi arah. Hal tersebut menyebabkan tanggapan yang diterima oleh pencacah tegangan sudah terganggu oleh banyaknya data gangguan.
V.1.2 Konversi Nilai Tegangan ke Volume
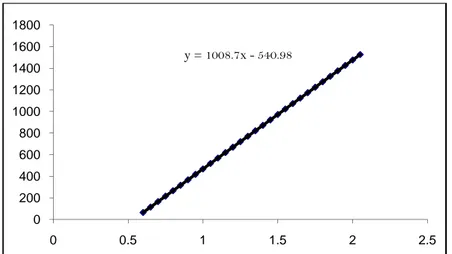
Proses konversi akan menentukan seberapa besar tegangan keluaran, besarnya tegangan akan dideteksi oleh ADC 8 bit yang diuraikan dalam kode digital untuk dibaca oleh komputer dan menentukan seberapa banyak jumlah larutan yang masuk ke dalam tabung pencampur. Gambar di bawah ini adalah grafik konversi nilai tegangan terhadap volume larutan.
Karena pengukuran volume larutan hanya pada rentang 0 sampai 1500 ml saja, oleh karena itu data tegangan yang kemungkinan diukur juga hanya berkisar pada angka 0-2,05 Volt. Artinya jika terdapat tegangan yang masuk sebesar 1 Volt itu itu artinya ketinggian larutan yang terdapat di tabung pencampur sekarang adalah 5,95 cm atau jumlah larutan yang ada di tabung pencampur sekarang adalaah 468 mililiter larutan.
V.2 Pengukuran Kecepatan Aliran Larutan pada Tabung
Dari keseluruhan 8 tabung yang terpasang pada sistem, prroses pengujian dilakukan untuk tabung 2, tabung 4 dan tabung 5. Tujuan pengujian ini adalah untuk menghitung kecepatan aliran dari turunnya larutan pada masing-masing tabung
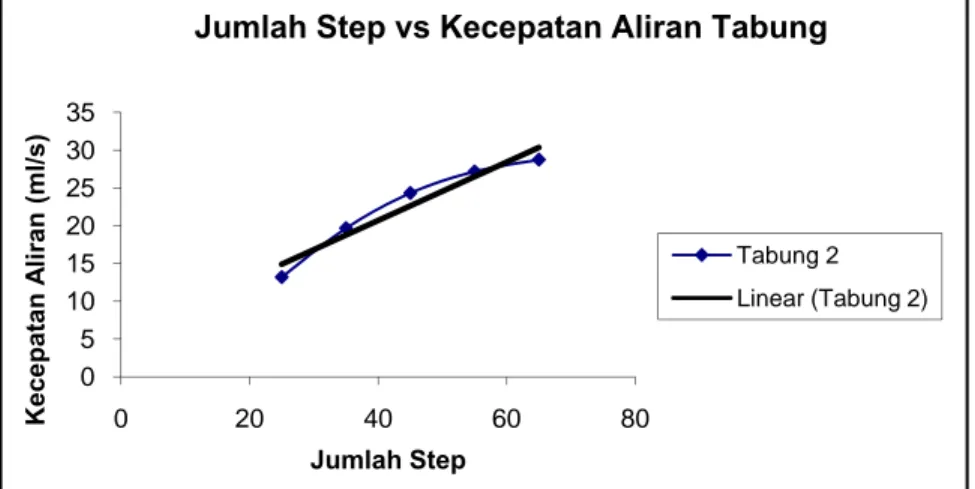
Pada proses pengukuran laju aliran larutan untuk tabung 2 dengan jumlah step yang berbeda didapatkan hubungan antara jumlah step terhadap kecepatan aliran sebagai berikut.
Gambar diatas memperlihatkan salah satu pengaruh gerakan jumlah step pada tabung 2 terhadap kecepatan aliran dari larutan. Jumlah step 65 adalah jumlah step bukaan sebesar 80% dari tabung 2. Sedangkan untuk bukaan 0% kecepatan aliran terjadi pada laju 4 ml/s. Hal ini dikarenakan meskipun tidak ada gerakan
Gambar 5.2 Grafik konversi tegangan terhadap volume aliran yang masuk ke
tabung pencampur y = 1008.7x - 540.98 0 200 400 600 800 1000 1200 1400 1600 1800 0 0.5 1 1.5 2 2.5
sama sekali dari motor stepper, namun valve masih dalam keadaan terbuka di masing-masing sisinya.
V.3 Sistem Fuzzi
V.3.1 Model logika fuzzi
Dalam model logika fuzzi sistem Hidroponik Tomat NFT, kontrol fuzzi digunakan untuk mengontrol jumlah volume dari masing-masing larutan yang masuk ke tabung pencampur. Jumlah volume yang masuk ke dalam tabung pencampur dijadikan sebagai input fuzzi. Sedangkan output fuzzi berupa besar bukaan untuk masing-masing motor steper.
Mekanisme interferensi logika fuzzi yang digunakan adalah inferensi Mamdani Centroid. Uji penerapan dilakukan pada jangkauan input yang terletak pada nilai 0 sampai 500ml dan output yang terletak pada nilai 0-75 step.
Gambar 5.3 Kalibrasi Jumlah Step terhadap Kecepatan Aliran Larutan 0 5 10 15 20 25 30 35 0 20 40 60 80 Kecepatan A liran (ml/s) Jumlah Step
Jumlah Step vs Kecepatan Aliran Tabung
Tabung 2 Linear (Tabung 2)
Input Vo Gambar dengan j memiliki “Besar”, (trimpf). “Sedang” Titik pers Pemilihan maupun bertujuan domain h merupaka adalah fu olume diatas men angkauan 0 5 buah hi dan “SngtB Domain him ” [150-350], silangan terl n domain i “SngtBesar n untuk men himpunanny an fungsi da ungsi output nunjukkan v -500 ml. Hi impunan ya Besar” denga mpunan “Sn , “Besar” [2 etak pada ni input “Sngt r” dengan ndapatkan k ya. Kecepata ari besar bu dari variabe Gambar 5.4 I variabel fuz impunan fuz aitu “SngtKe an bentuk fu ngtKecil” [0 250-450], da ilai 100; 200 tKecil”, “Ke rentang s ecepatan ali an aliran da ukaan dari s l volume. Input variabel zzi berupa zzi dari bes ecil”, “Keci ungsi keangg 0-150], “Ke an “SngtBesa 0; 300; dan 4 ecil”, “Seda elangnya m iran tertentu ari masing-m step fuzzi y volume besar volum sar volume i il”, “Sedang gotaan segiti ecil” [50-250 ar” [350-500 400. ang”, “Besa masing-masi u dari tiap-ti masing larut ang tidak la me ini g”, iga 0], 0]. ar” ng iap tan ain
Output B Gambar dengan j memiliki dengan himpunan dan “SB” Pemilihan aliran yan sampai 7 nilia step contoh p Kecepata Hal ini m Kondisi y Besar Bukaa 5.4 menunju angkauan 0 5 buah him bentuk fun n “SK” [0-2 ” [55-75]. n domain t ng diharapk 75 dibagi m p fuzzi denga pada rentan an Aliran lar membuat nila yang sama j Gamb an ukkan variab -75 step. Hi mpunan yai ngsi keang 20], “K” [2,5 tersebut did kan. Terlihat menjadi lima an derajat ke ng pertama rutan yang d ai puncak da juga terjadi bar 5.5 Output bel output f impunan fuz itu “SK”, “ ggotaan seg 5-27,5], “S” dasarkan pa bahwa rent grup. Masi eanggotaan yakni daer diharapkan a ari himpunan dengan dom t variabel Buka fuzzi berupa zzi dari bes “K”, “S”, “B
gitiga (trim [20-55], “B
ada kebutuh ang nilai ste ing-masing g terbesar, yak rah domain adalah antara n berada pad main himpu aan Stepper a besar buka sar volume i B”, dan “SB mpf). Doma B” [27,5-52,5 han kecepat ep fuzzi dari grup memili kni 1. Sebag input “SK a 0-1 ml/det da titik 3 ste nan “K”, “S aan ini B” ain 5], tan i 0 iki gai K”, ik. ep. S”,
“B” dan yang diha ml/detik, larutanny Aturan Untuk m dari itu If ini. Gam input terh Terdapat 1. Jika v 2. Jika v 3. Jika v 4. Jika v “SB” yang arapkan mem 18-19 ml/ ya. mendapatkan If-then atura mbar dibawa hadap output lima aturan volume pada volume pada volume pada volume pada Gambar memiliki nil miliki kecepa /detik dan pemetaan d an diaplikasi ah ini menj t pada sistem dari sistem a input 1 “Sn a input 1 “Ke a input 1 “Se a input 1 “Be r 5.6 Tampilan lai puncak d atan aliran s 24-25 ml/d
dari nilai inp kan dalam m elaskan bag m logika fuzz logika fuzzi ngtKecil” ma ecil” maka o edang” maka esar” maka o Aturan yang d di titik 20, 3 ebesar 6-7 m detik ketika put terhadap model sistem gaimana hub zi. i ini, yaitu: aka output bu output bukaa a output buka output bukaa digunakan pada 38, 55, dan 7 ml/detik, 12-a meng12-alirk p output, ma m logika fuz bungan anta ukaan “SB” an “B”, aan “S” an “K”, dan a Logika Fuzzi 73. 13 kan aka zzi ara , i
5. Jika volume pada input 1 “SngtBesar” maka output bukaan “SK”
V.3.2 Uji Sistem Fuzzi
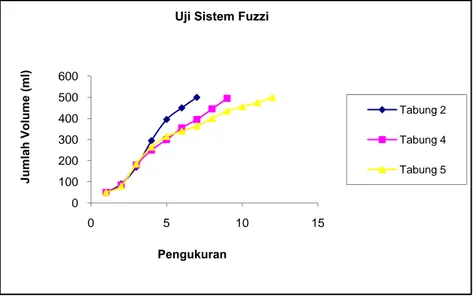
Pada ujicoba ini, proses pengaliran dihentikan ketika volume larutan dari masing-masing tabung mencapai 500 ml. Kecepatan aliran yang diharapkan berkisar antara 0-25 ml/s. Oleh karenanya pemilihan domain input dan output terletak pada semesta 0-500 ml dan 0-75 step.
Dari percobaan yang dilakukan, didapat data sebagai berikut,
Kondisi awal tabung terisi dengan larutan sebanyak 50 ml. Selanjutnya, set point untuk pengaliran pertama dilakukan dengan pemberian input fuzzi dengan bukaan 30 step dengan selang waktu 5 detik. Dengan bukan tersebut diharapkan kecepatan aliran dari tabung adalah 10 ml/detik. Oleh karena itu untuk nilai puncak pada himpunan “SangtKecil” terletak pada angka 50 ml. Dengan pemilihan titik
Gambar 5.7 Uji sistem fuzzi untuk tiga tabung
0 100 200 300 400 500 600 0 5 10 15 Jumlah Volume (ml) Pengukuran
Uji Sistem Fuzzi
Tabung 2
Tabung 4
puncak di angka tersebut memungkinkan nilai dari setting point pertama terletak pada daerah himpunan tersebut.
Sementara itu pemilihan domain output untuk bukaan stepper yang memiliki 5 buah himpunan “SK” [0-20], “K” [2,5-27,5], “S” [20-55], “B” [27,5-52,5], dan “SB” [55-75] dengan bentuk fungsi keanggotaan segitiga (trimpf) dimaksudkan untuk mendapatkan hasil fuzzi setelah proses pertama pada himpunan “SB”. Hal tersebut dikarenakan pada daerah domain “SB” larutan dari masing-masing tabung akan mengalirakan larutannya dengan kecepatan 22-24 ml/detik. Dengan kecepatan tersebut maka dapat diprediksi bahwa input fuzzi selanjutnya terletak di domain himpunan “K”.
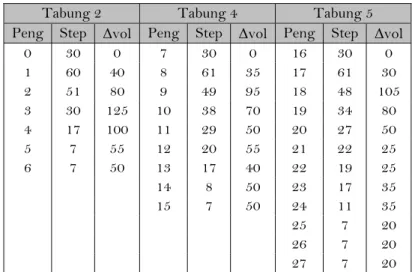
Tabel diatas memperlihatkan jumlah pengukuran yang dibutuhkan oleh masing-masing tabung untuk mencapai setting point-nya. Step menjelaskan output dari fuzzi yang digunakan untuk menggerakkan
Tabung 2 Tabung 4 Tabung 5
Peng Step Δvol Peng Step Δvol Peng Step Δvol 0 30 0 7 30 0 16 30 0 1 60 40 8 61 35 17 61 30 2 51 80 9 49 95 18 48 105 3 30 125 10 38 70 19 34 80 4 17 100 11 29 50 20 27 50 5 7 55 12 20 55 21 22 25 6 7 50 13 17 40 22 19 25 14 8 50 23 17 35 15 7 50 24 11 35 25 7 20 26 7 20 27 7 20
Tabel 5.1 Data perubahan Step terhadap Jumlah Volume yang masuk
motor stepper. Sedangkan ΔVol adalah selisih antara volume setelah dialirkan terhadap volume sebelumnya untuk tabung yang diamati.
Pada uji sistem fuzzi untuk tabung dua proses untuk mencapai set point 500 ml lebih cepat daripada yang dilakukan oleh tabung empat dan tabung lima. Pada tabung dua jumlah larutan 500 ml tercapai pada pengaliran ke-enam, sedangkan pada tabung empat dan tabung lima jumlah larutan yang sama dicapai pada pengaliran ke-delapan tabung empat (atau pegukuran ke lima belas dari pengukuran pertama) dan pengaliran ke sebelas tabung lma atau (pengukuran ke dua puluh tujuh dari pengaliran pertama). Hal ini dikarenakan untuk keadaan diam (idle) pada tabung dua akan mengalirakan larutan sebanyak 4 ml untuk setiap detiknya. Sedangkan tabung empat dan tabung dua sendiri relatif lebih stabil (tidak atau hanya sedikit larutan yang mengalir) untuk keadaan diam.
Pada pengaliran pertama masing-masing tabung, yaitu dengan perintah bukaan step sebesar 30 menghasilkan keluaran jumlah volume sebesar 40 ml untuk tabung 2, dan 35 liter untuk tabung 4 dan tabung 5. Sebagai perbandingan seting awal fuzzi diharapkan akan megalirkan 50 ml larutannya. Jumlah volume aktual yang masuk ke dalam tabung pencampur memerintahkan kembali fuzzi untuk memberikan perintah menggerakkan motor steppernya. Pada kondisi ini jumlah stepper fuzzi akan menurun sesuai dengan no pengukurannya. Jumlah stepper fuzzi yang menurun ini sebanding dengan jumlah volume larutan yang berkurang ketika masuk ke tabung pencampur pada tiap pengukurannya. Hal itu tercipta untuk pengukuran pada tabung 5.
pengaliran ke-5 dan 6 untuk tabung 2 dan pengaliran ke-8 dan 9 untuk tabung 4. Kemungkinan ini terjadi dikarenakan jeda antar pengaliran yang cukup lama sehingga tabung 2 dan tabung 4 mengalirskan larutannya meskipun dalam keadaan diam (idle).
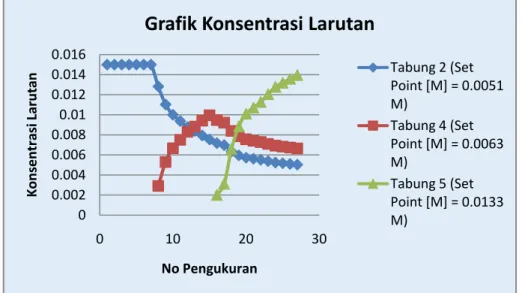
Gambar 5.7 memperlihatkan pergerakan dari konsentrasi larutan masing-masing tabung ketika terjadi pencampuran pada tabung pencampur. Konsentrasi awal menunjukkan konsentrasi yang terdapat pada masing-masing tabung. Konsentrasi awal ini berbeda untuk masing-masing tabung, tergantung dari setinganya. Setingan tersebut yang menentukan berapa banyak larutan yang diperlukan untuk dialirkan. Lalu setelah dialirkan didapat konsentrasi akhir dari larutan. Konsentrasi akhir ini kemudian dibandingkan dengan konsentrasi harapan yang terdapat pada tabel 2.1 data kebutuhan nutrisi tomat.
Gambar 5.8 Indeks Pengukuran terhadap pergerakan konsentrasi larutan 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0 10 20 30 Konsentrasi Larutan No Pengukuran
Grafik Konsentrasi Larutan
Tabung 2 (Set Point [M] = 0.0051 M) Tabung 4 (Set Point [M] = 0.0063 M) Tabung 5 (Set Point [M] = 0.0133 M)Dalam percobaan ini, tabung 2 memiliki konsentrasi larutan Monopotasaium Phosphate sebesar 0.015 M, sedangkan tabung 4 dan tabung 5 konsentrasinya larutan Potassium Nitrate dan Magnesium Sulfate sebesar 0.02 M dan 0.043 M. Untuk mendapatkan nilai konsentrasi yang diharapkan maka masing-masing tabung diharapkan mengalirkan volumenya sebesar 500 ml (Persamaan 2.2 dan 2.3).
Pada tujuh pengaliran pertama melalui tabung 2 tidak terjadi penngenceran sama sekali. Nilai dari konsentrasi larutan Monopotassium Phosphate pada tabung pencampur masih tetap sama dengan nilai konsntrasi di tabung 2, yaitu sebesar 0.015 M. Dengan demikian kesalahan yang terdapat pada pengukuran ini masih sebesar 195%.
Setelah itu proses selanjutnya adalah pengaliran larutan Potassium Nitrate pada tabung 4. Proses pencampuran yang terjadi adalah pegentalan larutan Potassium Nitrate lalu kemudian larutan tersebut diencerkan. Sedangkan pada larutan Monopotassium Phosphate prosesnya adalah pengenceran larutan. Pada pengenceran ke-15 didapatkan nilai konsentrasi larutan Monopotassium Phosphate pada tabung 2 dan Potassum Nitrate pada tabung 4 adalah sebesar 0.00733769 M dan 0.0094975 dengan kesalahan masing-masing larutan sebesar 48% dan 38%.
Pengaliran terakhir terjadi untuk tabung 5 untuk larutan Magnesium Sulfate. Proses pengaliran ini adalah pengentalan larutan Magnesium
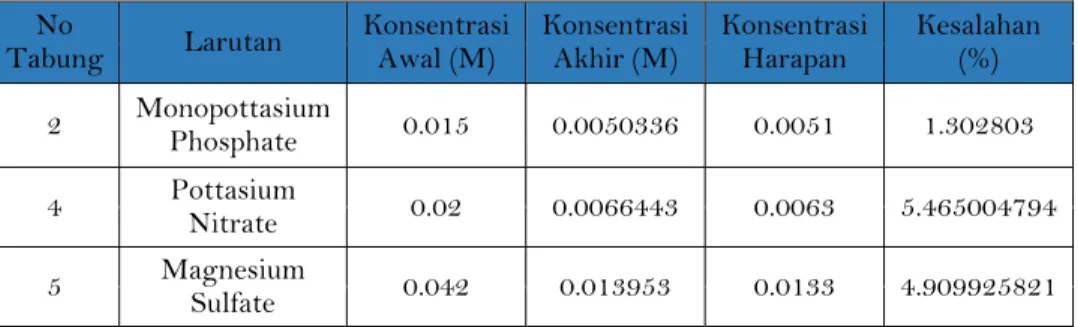
Sulfate serta pengenceran larutan Monopotassum Phosphate dan Potassium Nitrate. Pada percobaan ini 11 pencampuran yang dilakukan oleh larutan Magnesium Sulfate terhadap larutan Monoptassium Phosphate dan Potassium Nitrate menghasilkan konsentrasi akhir dari masing-masing larutan sebesar 0.00503336 M (Monopotassium Phosphate), 0.0066443 M (Potassium Nitrate), dan 0.01395303 M (Magnesium Sulfate) dengan kesalahan akhir masing-masing larutan sebesar 1.3%, 3.46% dan 4.9% (lihat tabel 5.2).
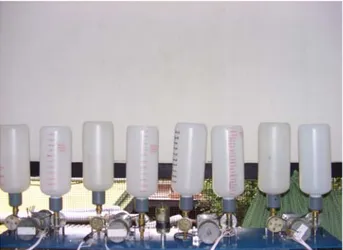
V.4 Penerapan Kontrol Nutrisi
Gambar 5.9 memperlihatkan ke-delapan tabung dari nutrisi yang akan mengalirkan larutannya ke dalam tabung pencampur. Kedelapan tabung tersebut berisi 8 larutan nutrisi yaitu Monopottasium Phosphate, Potassum Nitrate, Magnesium Sulfate, Potassium Chloride, Calcium Nitrate, Campuran iron Chelate, Micronutrient, dan Air Aquades.
No
Tabung Larutan Konsentrasi Awal (M) Konsentrasi Akhir (M) Konsentrasi Harapan Kesalahan (%) 2 Monopottasium Phosphate 0.015 0.0050336 0.0051 1.302803 4 Pottasium Nitrate 0.02 0.0066443 0.0063 5.465004794 5 Magnesium Sulfate 0.042 0.013953 0.0133 4.909925821
Sedangkan untuk pengaliran nutrisi dari tabung pencampur diatur dengan kecepatan konstan 20 ml/detik. Gambar dibawah ini memperlihatkan bagaimana aliran larutan mengalir pada wadah penanaman. Terlihat bahwa pada ujung bagian kiri larutan keluar dari tabung pencampur, dan dialirkan menuju tempat pembuangan sementara di bagian ujung yang kanan.
Gambar 5.10 Gambar Wadah penanaman, tempat pengaliran untuk Hidroponik
NFT tanaman tomat
Setelah dipastikan larutan mengalir dengan lancar, penanaman tumbuhan tomat untuk sistem hidroponik NFT dilakukan. Sterofoam yang telihat berwarna putih di gambar 5.11 berfungsi sebagai penahan tanaman agar dapat berdiri di wadah penanaman. Pada saat penempatan di media sterofoam perlu dipastikan bahwa akar tanaman dapat benar-benar menerima nutrisi yang dialirkan di wadah penanaman tersebut.
Hasil implementasi dari rancangan sistem pada bab IV diperlihatkan oleh gambar 5.12 di halaman 57. Sistem yang telah dibangun memiliki tinggi 1.46 m dengan lebar 1.2 meter. Tiang-tiang penyannga dibuat dari campuran alumanium dan besi. Untuk jalur pengaliran nutrisi digunakan selang dengan diameter 4 cm. Wadah penanaman berdimensi 43 × 21 × 18 cm. Jalur komunikasi dilakukan dengan menggunakan tiga buah kabel paralel dengan panjang 1.5 meter dengan dua buah kabel untuk menghubungkan plant dan mikrokontroller dan satu buah kabel lainnya untuk menghubungkan mikrokontroller dan komputer. Selain itu juga digunakan satu buah kabel serial dengan panjang 3 m untuk memgirimkan data dari komputer ke mikrokontroller.
Gambar 5.11 Tanaman tomat yang disimpan pada media Sterofoam, sistem aliran
Gambar keseluruhan sistem yang dihasilkan diperlihatkan oleh gambar 5.13 dibawah ini.
Gambar 5.13 Implementasi keseluruhan perangkat sistem hidroponik NFT tanaman tomat Gambar 5.12 Implementasi perancangan sistem untuk hidroponik NFT tanaman tomat